Đề cương môn Truyền động điện - Trường Đại học bách khoa - Đại học đà nẵng. Tài liệu gồm 25 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao.
Môphỏng từngthànhphầncủahệthống truyềnđộng điện
Đề cương môn Truyền động điện - Trường Đại học bách khoa - Đại học đà nẵng.
Tài liệu gồm 14 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao.
Môn: Truyền động điện (TDD) 38 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 509 tài liệu
Tác giả:










Preview text:
ĐẠI HỌC ĐÀ NẴNG
TRƯỜNG ĐẠI HỌC BÁCH KHOA KHOA ĐIỆN BÀI TẬP MÔN HỌC
TỔNG HỢP HỆ THỐNG TRUYỀN ĐỘNG ĐIỆN
TÊN ĐỀ TÀI {Bold, size 20-30, tùy theo số chữ,… của tên đề tài}
Giảng viên: PGS. TS. LÊ TIẾN DŨNG
Sinh viên thực hiện: NGUYỄN VĂN A Lớp: ……………
Lớp học phần : ……………..
Ngành: KỸ THUẬT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA MỤC LỤC
DANH SÁCH HÌNH ẢNH .................................................................................................. 3
DANH SÁCH CÁC BẢNG ................................................................................................. 4
CHƯƠNG 1: ĐỀ MỤC CHƯƠNG MỘT ........................................................................... 5
1.1 Mục con cấp 1 ............................................................................................................... 5 1.1.1
Mục con cấp 2 ......................................................................................................... 5 1.1.2
Mục con cấp 2 ......................................................................................................... 6
CHƯƠNG 2: ĐỀ MỤC CHƯƠNG HAI ............................................................................. 7
CHƯƠNG 3: LỚP ĐA 33C ................................................................................................. 8
3.1 Báo cáo của lớp 33c ...................................................................................................... 8
KẾT LUẬN CHUNG ........................................................................................................ 10
TÀI LIỆU THAM KHẢO ................................................................................................. 11 2
DANH SÁCH HÌNH ẢNH
Hình 1. 1 Thêm hình chương 1 và đánh số ......................................................................... 1 3
DANH SÁCH CÁC BẢNG
Bảng 1. 1 Thêm bảng chương 1 và đánh số ......................................................................... 5 4
CHƯƠNG 1: ĐỀ MỤC CHƯƠNG MỘT 1.1 Mục con cấp 1
1.1.1 Mục con cấp 2 Phần nội dung
Bộ biến đổi điện tử công suất còn được gọi là bộ biến đổi tĩnh (static converter) để
phân biệt với các máy điện truyền thống (electric machine) biến đổi điện dự
Hình 1. 1 Thêm hình chương 1 và đánh số 5 Hình 1. 2 lớp 33c
1.1.2 Mục con cấp 2 Nội dung
Bảng 1. 1 Thêm bảng chương 1 và đánh số 6
CHƯƠNG 2: ĐỀ MỤC CHƯƠNG HAI 7
CHƯƠNG 3: LỚP ĐA 33C 3.1
Báo cáo của lớp 33c 8
CHƯƠNG 4 – MÔ PHỎNG, KIỂM NGHIỆM
4.1. Mô phỏng từng thành phần của hệ thống truyền động điện
a) Mô phỏng động cơ điện
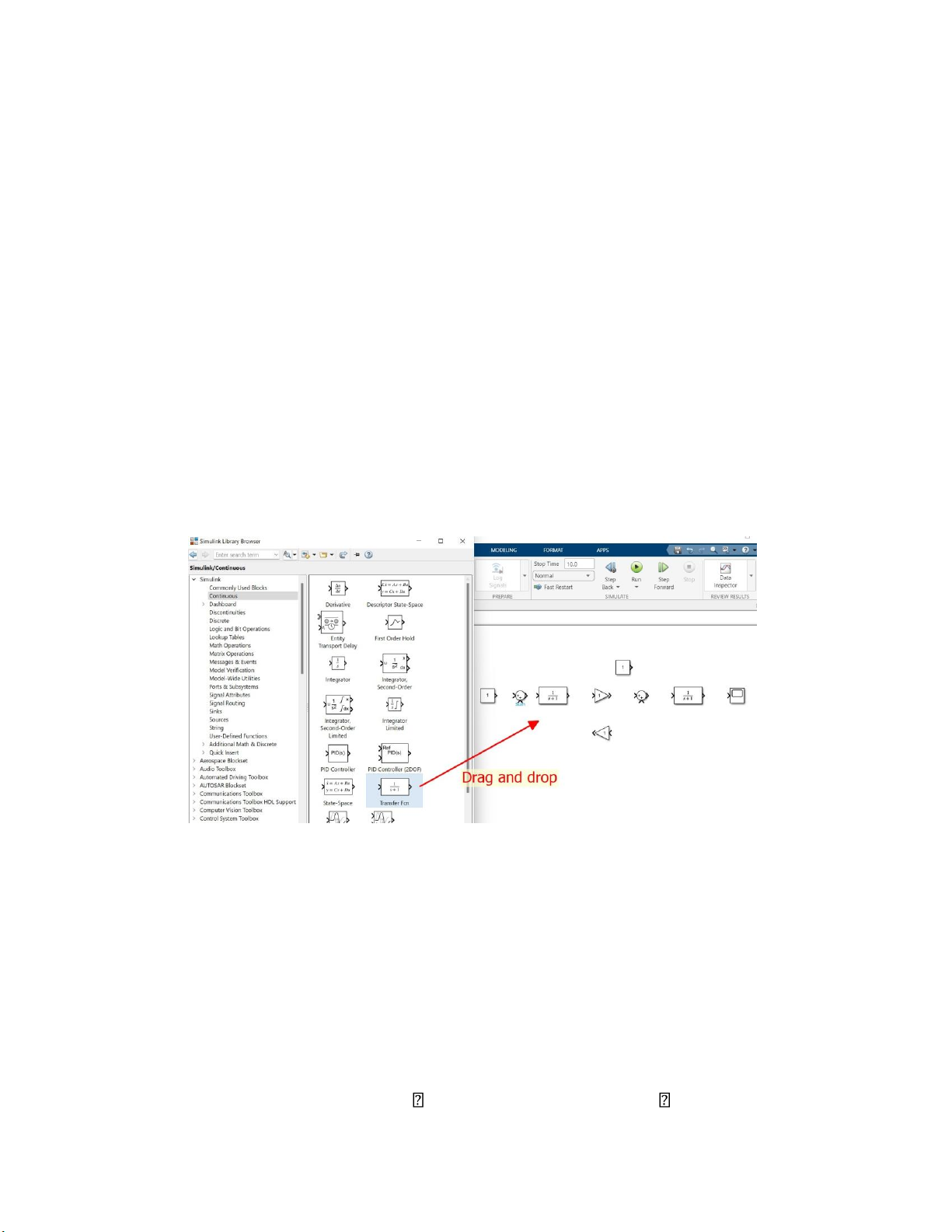
Với kết quả mô hình toán học ở dạng hàm truyền đạt của động cơ điện một chiều
kích từ độc lập như ở Hình 3.3, chúng ta sử dụng Simulink để thực hiện tính toán mô
phỏng động cơ. Để lấy ra các khối mô phỏng hàm truyền đạt, trong cửa sổ thư viện
Simulink Library Browser ⟶ chọn nhóm thư viện Simulink ⟶ Continuous ⟶ chọn
khối Transfer Fcn để kéo thả vào mô hình. Cách thực hiện được minh họa như trên Hình 4.1.
Tương tự như vậy, chúng ta vào nhóm Math Operation để lấy các khối Gain và
Sum. Vào nhóm Sources để lấy khối Constant làm khối đầu vào điện áp Va, và khối
Step làm khối đầu vào mô-men tải TL. Vào nhóm Sinks để lấy khối Scope nhằm hiển thị
các kết quả đồ thị mô phỏng.
Hình 4.1 – Lấy khối Transfer Fcn kéo và thả vào mô hình
Sau khi đã có các khối cần thiết, chúng ta nháy kép chuột vào từng khối để thay
đổi tham số của khối. Nếu muốn xoay khối, chúng ta dùng tổ hợp phím Ctrl + R. Nếu
muốn hiểu rõ hơn về một khối, chúng ta chọn khối đó và nhấn chuột phải, sau đó chọn Help.
Sau khi thay đổi tham số của từng khối, chúng ta có kết quả mô hình mô phỏng
động cơ DC một chiều kích từ độc lập trên Matlab Simulink được thực hiện như trên
Hình 4.2. Mô hình này là kết quả thực hiện theo mô hình toán học ở Hình 3.3. Trong đó
Km_Phi là đại diện cho tham số KM , và Ke_Phi là đại diện cho Ke . Trong trường hợp từ 9
thông kích từ của động cơ là hằng số thì các hệ số này là hằng số. File mô phỏng
Simulink của chương trình được đặt tên là Chapter3_EX1_Dcmotor.slx.
Hình 4.2 – Mô phỏng động cơ DC trên Simulink theo mô hình hàm truyền đạt
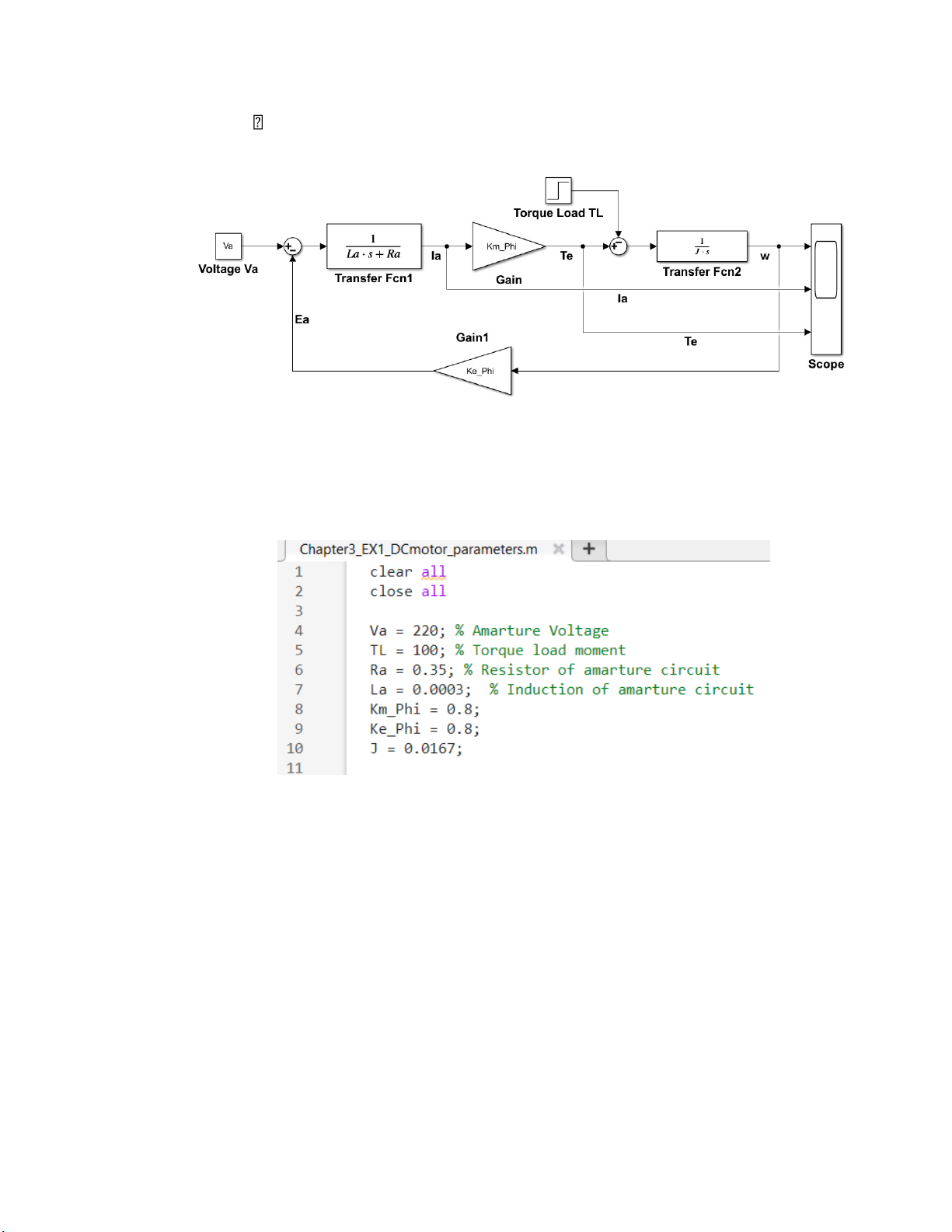
Để truyền các giá trị tham số cụ thể cho mô hình Simulink, chúng ta tạo một m-
file trong Matlab, đặt tên file là Chapter3_EX1_DCmotor_parameters.m và viết nội dung
của m-file như trên Hình 4.3.
Hình 4.3 – Matlab m-file tham số của động cơ DC
Để chạy mô phỏng, trước hết chúng ta chạy m-file Matlab
Chapter3_EX1_DCmotor_parameters.m để gán các giá trị cụ thể cho các tham số của
động cơ. Kết quả chạy m-file này sẽ tạo ra các biến Va, TL, Ra, La, Km_Phi, Ke_Phi và J
trong cửa sổ Workspace của Matlab. Tiếp theo, chúng ta chạy file Simulink
Chapter3_EX1_Dcmotor.slx bằng cách nhấn nút Run trên cửa sổ của file Simulink. Đặt
thời gian mô phỏng là 1s, kết quả đồ thị được xuất hiện khi chúng ta nháy kép chuột vào
khối Scope. Chúng ta có thể thực hiện một số tùy chỉnh về màu sắc, độ đậm của các
đường nét để dễ quan sát hơn. Để tùy chỉnh, trong cửa sổ đồ thị của Scope chúng ta chọn View ⟶ Style. 1 0
Hình 4.4 – Kết quả mô phỏng động cơ một chiều
Trên đồ thị Hình 4.4 chúng ta thấy tốc độ của động cơ (w) nhanh chóng tăng lên
đến giá trị xác lập, sau đó tại thời điểm 0.3s khi tải TL của động cơ tăng từ giá trị 0 lên
TL = 100Nm (thiết lập trong khối Step của mô hình Hình 3.5) thì tốc độ của động cơ
giảm xuống rồi sau đó giữ ổn định. Trên đồ thị Ia cũng cho thấy dòng điện phần ứng Ia
của động cơ có giá trị lúc ban đầu (dòng điện khởi động) có giá trị rất lớn hơn 500A.
Tương ứng đồ thị mômen Te cũng cho thấy mômen điện từ của động cơ sinh ra vào thời
điểm ban đầu có giá trị rất lớn, lớn hơn 400Nm. Điều này trong thực tế sẽ gây nguy hiểm
cho động cơ, vì vậy cần có các biện pháp hạn chế dòng điện và mômen khởi động của
động cơ. Theo thời gian, khi tốc độ (w) của động cơ tăng lên thì dòng điện phần ứng (Ia)
và mômen điện từ (Te) của động cơ giảm xuống và tiến đến giá trị ổn định. Tại 0.3s khi
xuất hiện tải của động cơ thì dòng điện Ia của động cơ tăng lên, và tương ứng thì mômen
điện từ của động cơ tăng lên. Khi mômen điện từ của động cơ tăng đến giá trị cân bằng
với mômen tải (Te = TL) thì tốc độ của động cơ giữ ổn định.
…………………………………. 1 1 1 2 KẾT LUẬN CHUNG Abcde 1 3
TÀI LIỆU THAM KHẢO
[1] Mohamed Hassan Ali, Abdelhamid Rabhi, Ahmed El hajjaji and Giuseppe M.
Tina. “Real Time Fault Detection in Photovoltaic Systems”, 2016, Turin, ITALY. 1 4