Bài giảng Chương 2: Phân tích hệ thống tuyến tính bất biến (LTI) trong miền thời gian môn Tín hiệu và hệ thống | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội
Bài giảng Chương 2: Phân tích hệ thống tuyến tính bất biến (LTI) trong miền thời gian môn Tín hiệu và hệ thống | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội. Tài liệu được sưu tầm giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem.
Môn: Tín hiệu và hệ thống 16 tài liệu
Trường: Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội 824 tài liệu
Tác giả:
Preview text:
EE 2005: Tín hiệu và hệ thống Lecture 3
Chương 2: Phân tích hệ thống tuyến tính bất
biến (LTI) trong miền thời gian Signals and Systems --HK242--
Tran Quang Viet – FEEE – HCMUT
Chương 2: Phân tích hệ thống LTI trong miền thời gian
2.1. Giới thiệu và phương pháp phân tích hệ thống LTI Signals and Systems --HK242--
Tran Quang Viet – FEEE – HCMUT 1 2.1.1. Hệ thống LTI
Hệ thống LTI: HT thỏa đồng thời tính tuyến tính & bất biến
Tuyến tính: T{k1x1(t)+…+knxn(t)}=k1T{x1(t)}+…+knT{xn(t)}
Bất biến: T{x(t-t0)}=y (t-t0) với y(t)=T{x(t)}
Môn học này tập trung khảo sát hệ thống LTI vì:
Phần lớn các hệ thống vật lý trên thực tế đều là HT LTI
Một số hệ thống là phi tuyến nhưng trong một giới hạn
nào đó người ta sẽ tương đương nó là LTI để khảo sát vì
ngõ ra của hệ thống LTI sẽ dễ dàng xác định thông qua
phương pháp “biểu diễn” tín hiệu EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U
2.1.2. Biểu diễn tín hiệu để phân tích HT LTI
Tín hiệu k(t), k=1,2,….n được gọi là tín hiệu cơ bản khi:
T{k(t)}=yk(t); yk(t) hoàn toàn xác định trước
Biểu diễn tín hiệu bất kỳ theo tín hiệu cơ bản ở dạng tổ
hợp tuyến tính có/không dịch thời gian:
f(t)=a (t t ) ... a (t t ) 1 1 1 n n n
Khi đó ngõ ra được xác định:
y(t)=T{f(t)}=T{a (t t ) ... a (t t )} 1 1 1 n n n TT (L)
y(t)=a T{ (t t )}... a T{ (t t )} 1 1 1 n n n BB(TI )
y(t)=a y (t t ) ... a y (t t ) 1 1 1 n n n EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U 2
2.1.2. Biểu diễn tín hiệu để phân tích HT LTI
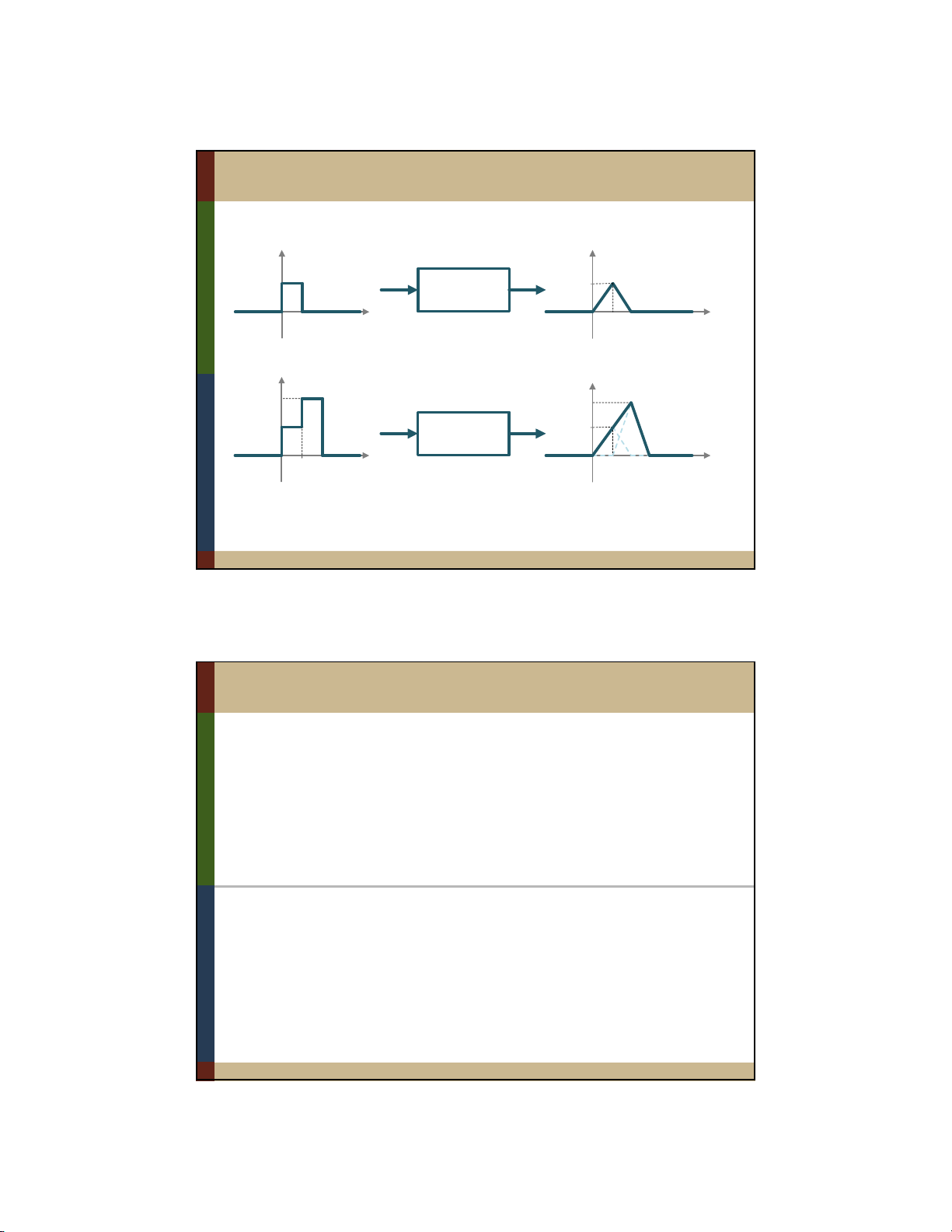
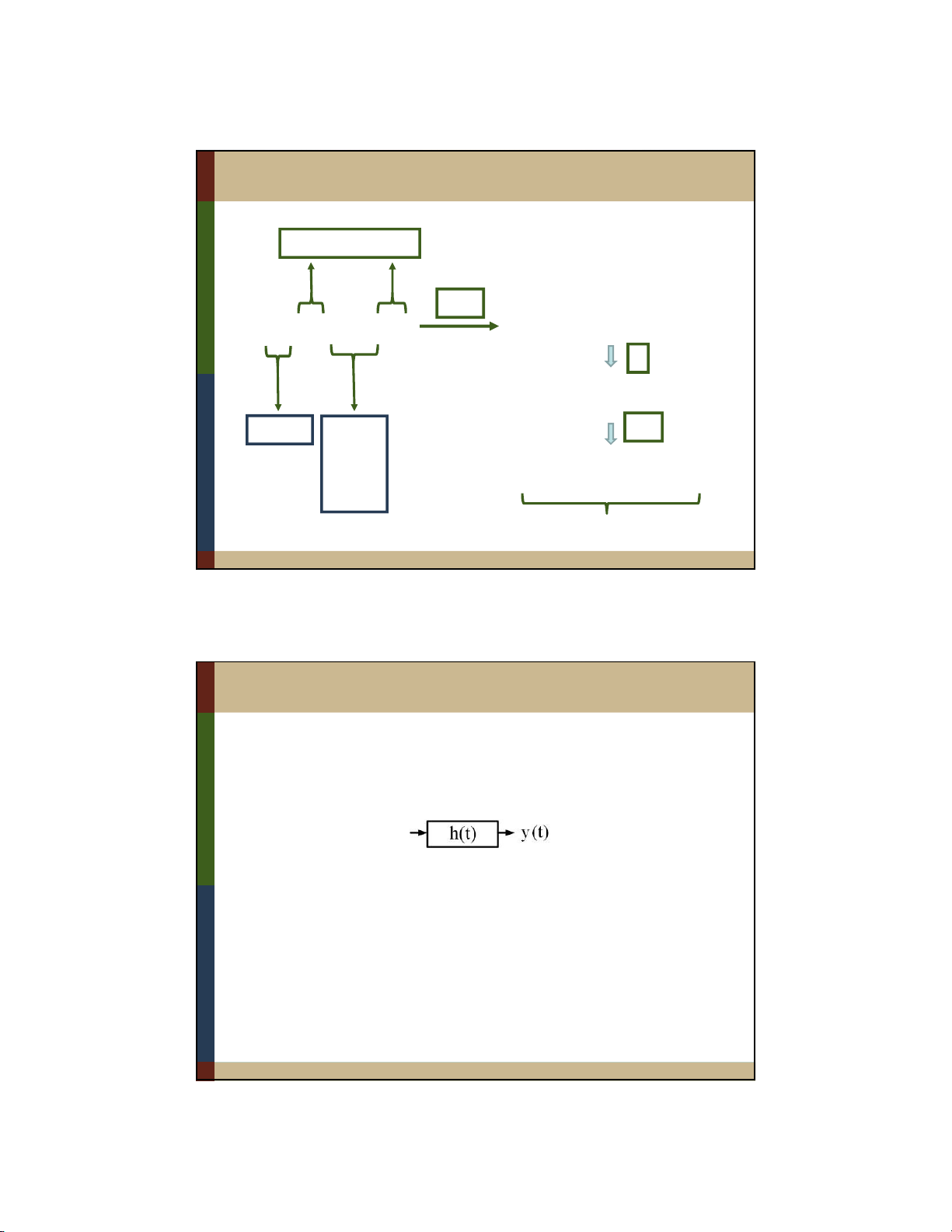
Ví dụ: (t) là ngõ vào hệ thống LTI và ngõ ra là (t) (t) (t) 1 Hệ thống 1 t (s) (LTI) t (s) 0 2 0 2 4
Khi đó: f(t) là ngõ vào hệ thống LTI và ngõ ra là y(t) f( x t()t) y(t) 2 2 1 Hệ thống 1 t (s) (LTI) t (s) 0 2 4 0 2 4 6 LTI
Vì: x(t)=(t)+2(t 2) y(t)=(t)+2(t 2) EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U
Chương 2: Phân tích hệ thống LTI trong miền thời gian
2.2. Đáp ứng xung và mô hình hệ thống LTI dùng tích chập Signals and Systems --HK242--
Tran Quang Viet – FEEE – HCMUT 3
2.2.1. Đáp ứng xung của hệ thống LTI
Gọi quan hệ vào ra của hệ thống LTI là: y(t)=T{x(t)}
Đáp ứng xung h(t) là đáp ứng của hệ thống với ngõ vào là xung đơn vị: hay: h(t)=T{(t)}
Ví dụ: y(t)=T{x(t)}=x(t-1) h(t)=T{(t)}=(t-1) EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U
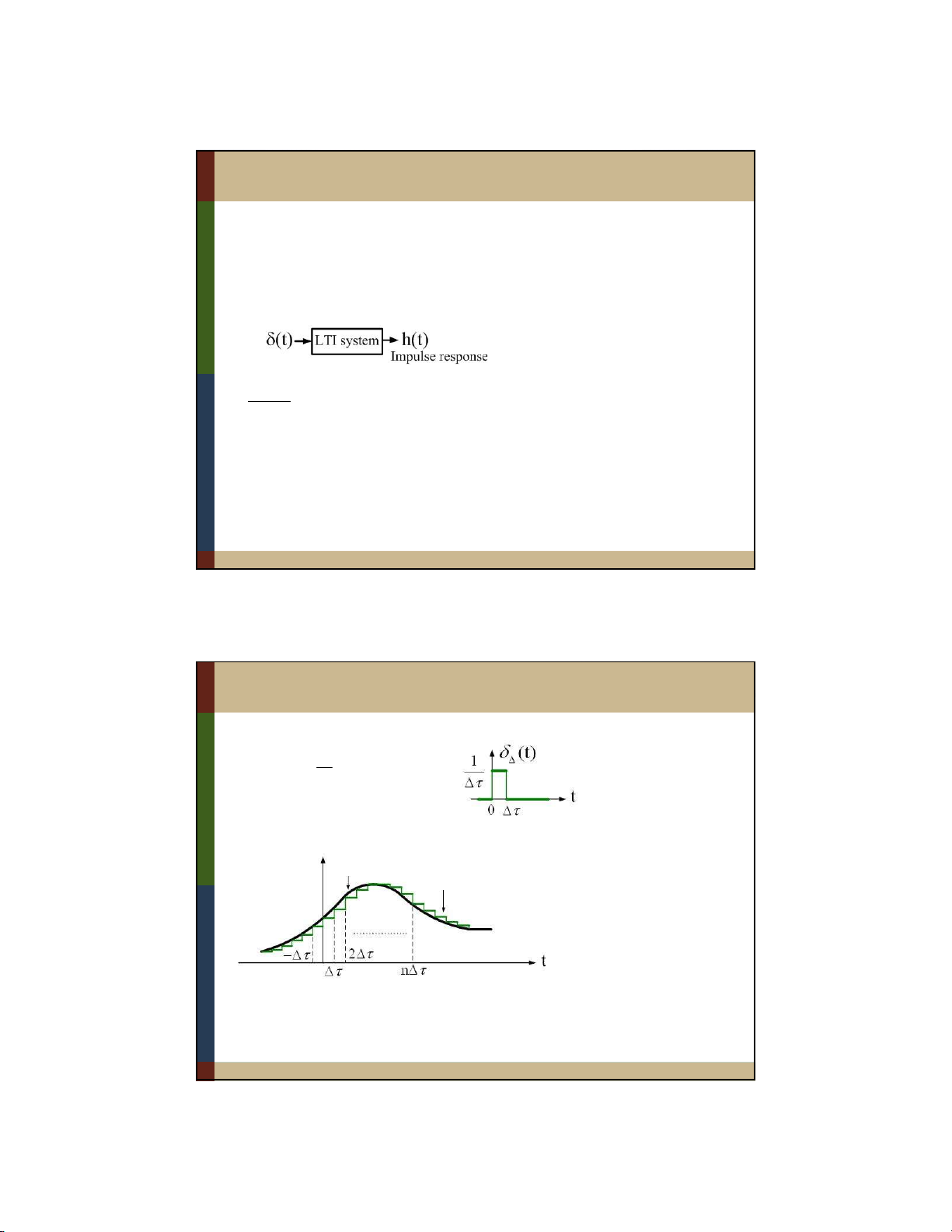
2.2.2. Biểu diễn t/hiệu theo xung đơn vị Nhắc lại xung (t): 1 ; 0 (t)= lim (t)= (t) 0; otherwise 0
Biểu diễn gần đúng f(t) dùng (t): x(t) x(t) ~
x (t)= x(n ) (t n ) n
Biểu diễn x(t) thành tổng các (t): ~ x (t)= lim x (t) x (t)= x( ) (t )d 0 EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U 4
2.2.3. Mô hình toán hệ thống LTI dùng tích chập (Hằng số với t) LTI x(t) x( ) (t )d y(t)=T{ x ( ) ( t ) d } L y(t)= x( ) { (t )}d T Tổng Tín TI hiệu y(t) x( )h(t )d cơ bản
Tích chập, ký hiệu x(t)*h(t) EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U
2.2.3. Mô hình toán hệ thống LTI dùng tích chập
Như vậy h(t) mô tả đầy đủ cho đặc tính của hệ thống LTI,
nên có thể biểu diễn hệ thống LTI theo mô hình “hộp đen” sau: x(t)
y(t) T{x(t)} x(t) h(t) EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U 5
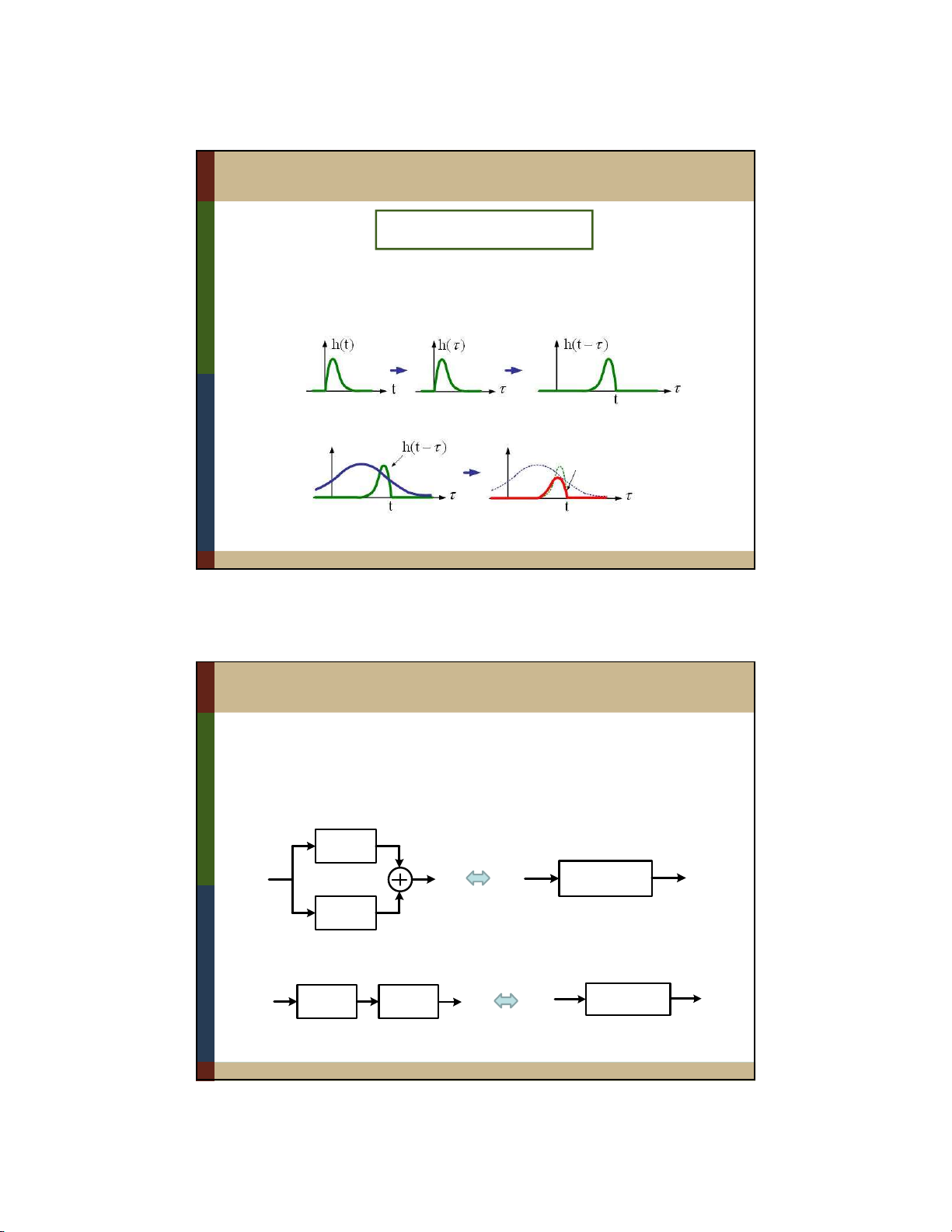
2.2.4. Tích chập và các tính chất x(t) h(t)= x( )h(t )d
(Lưu ý: ta sẽ tính tích phân trên theo thang thời gian còn t là
tham số cũng chính là biến thời gian của kết quả)
Xác định h(t-) theo biến :
Nhân x() với h(t-) x( ) x( )h(t )
Lấy tích phân trên toàn thang EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U
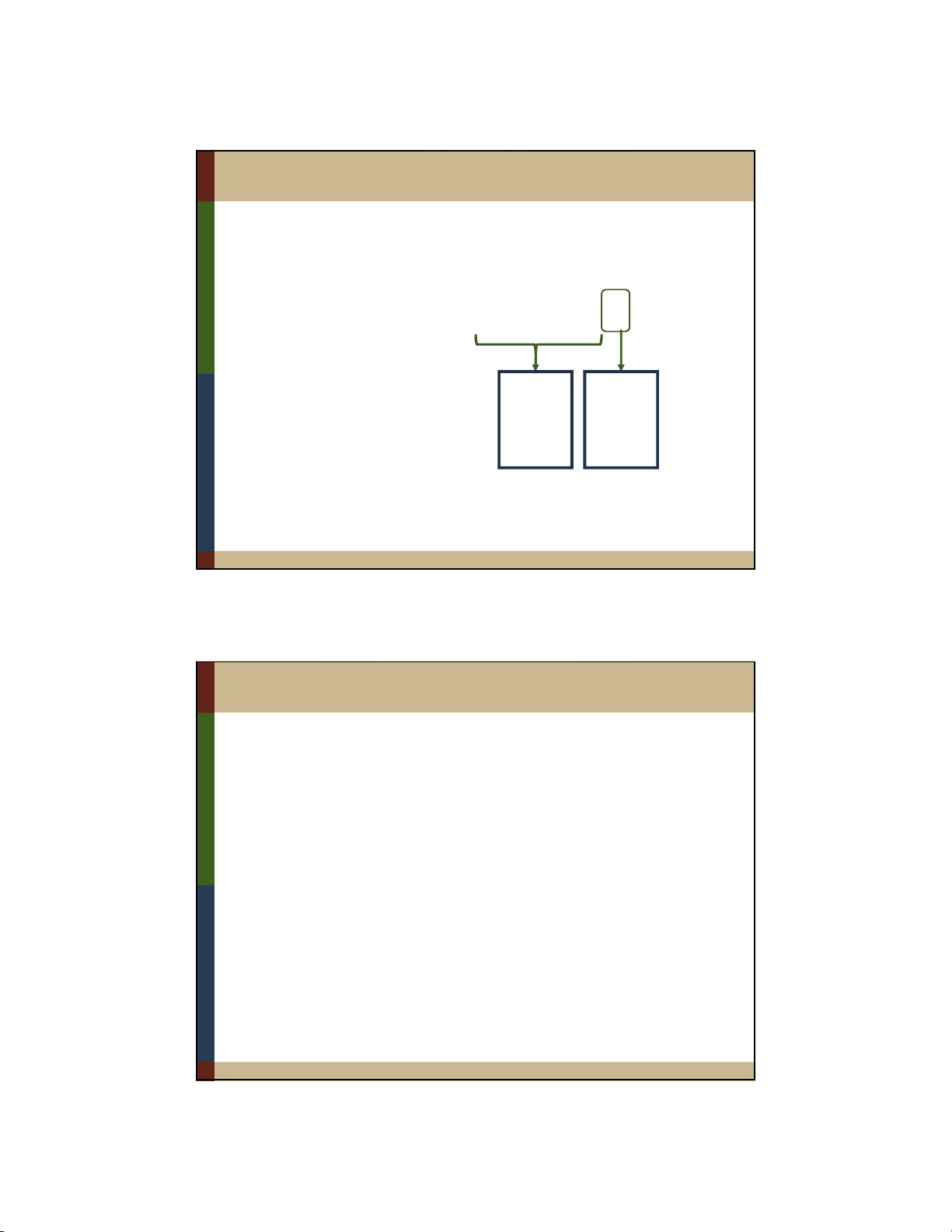
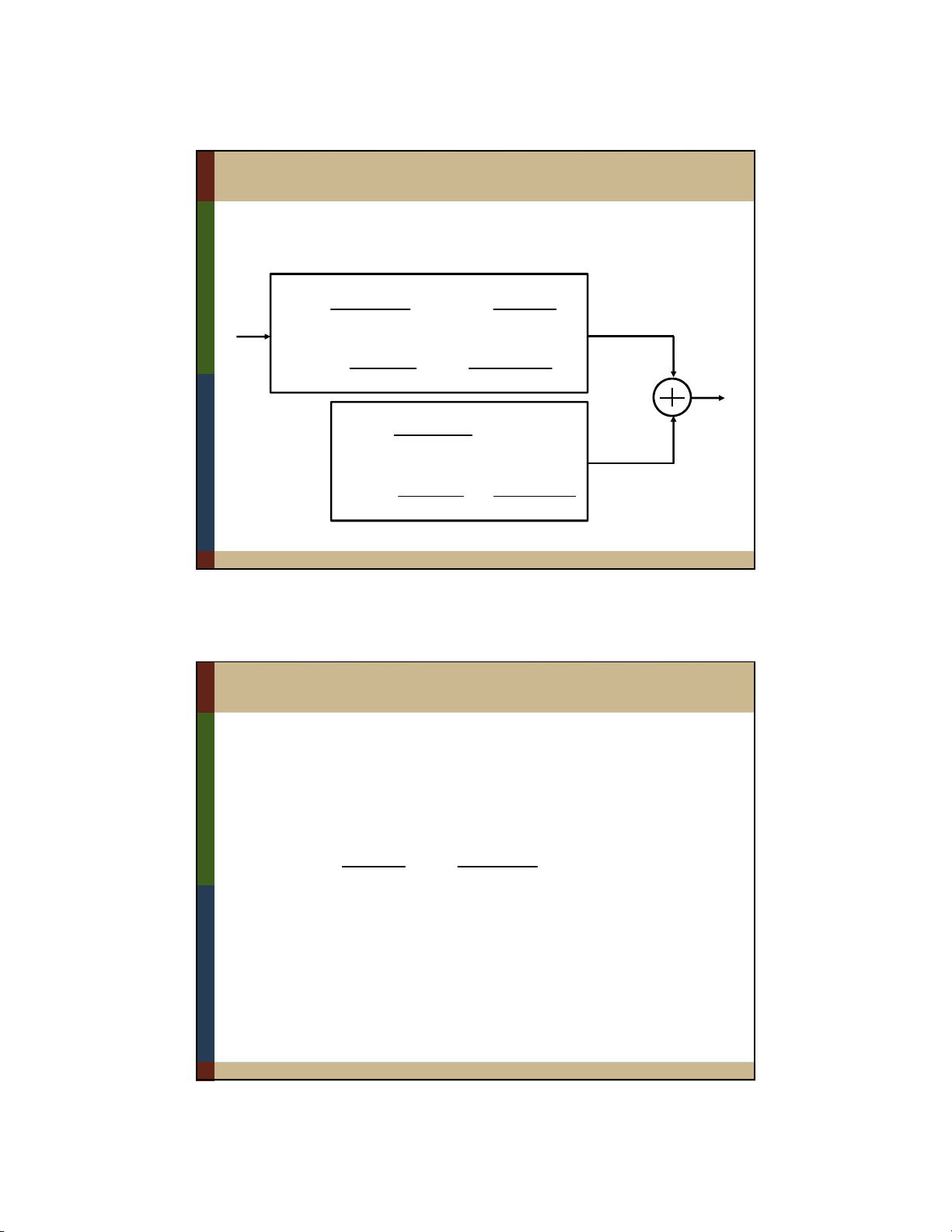
2.2.4. Tích chập và các tính chất
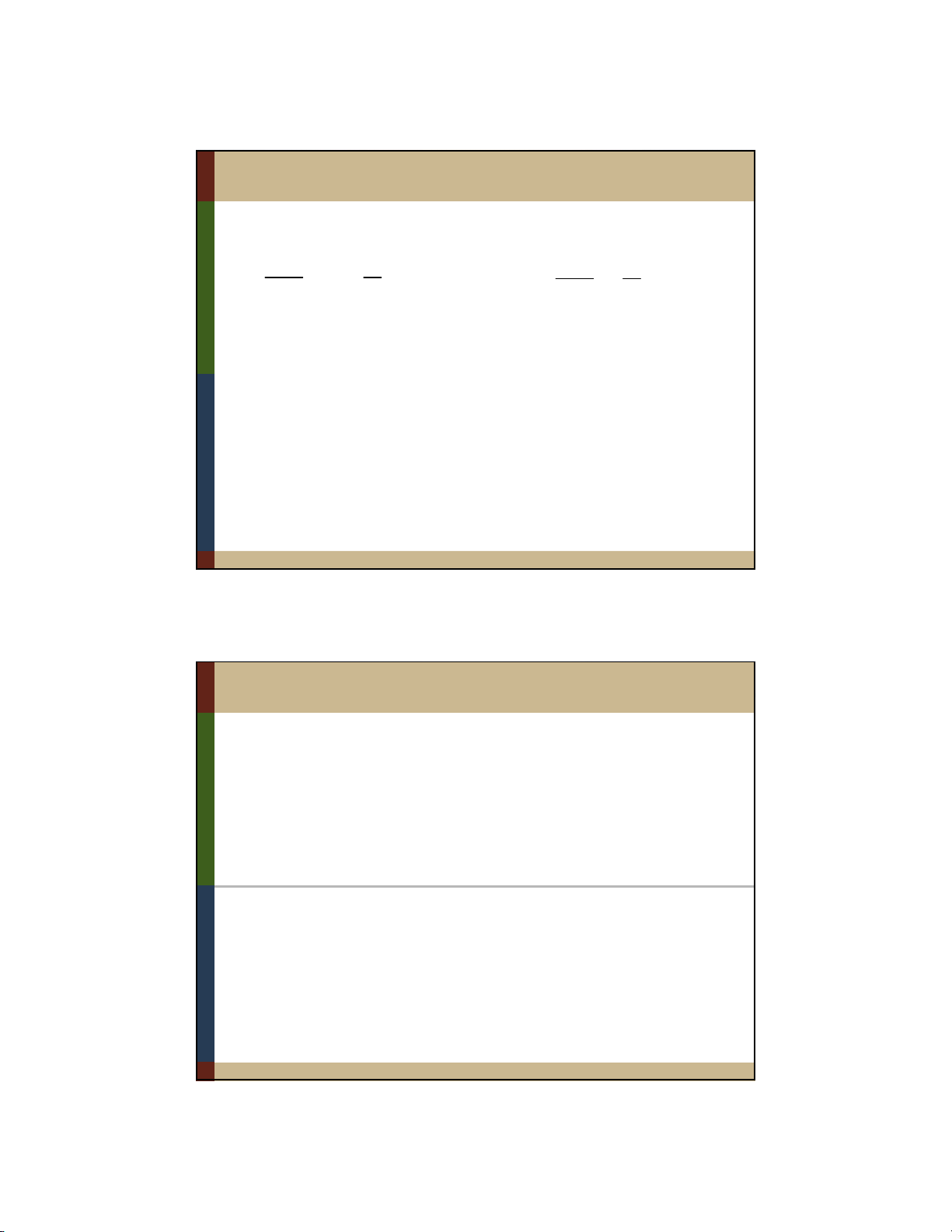
Tính giao hoán: y(t)=x(t) h(t)=h(t) x(t) x(τ)h(t τ)dτ h(τ)x(t τ)dτ
Tính phân phối: x(t) [h (t)+h (t)]=x(t) h (t)+x(t) h (t) 1 2 1 2 h1(t) f( x t()t y(t) f x(t) h1(t)+h2(t) y(t) h2(t)
Tính kết hợp: y(t)=[x(t) h (t)] h (t)=x(t) [h (t) h (t)] 1 2 1 2 f x ((tt)) h y(t) f x (t)t y(t) 1(t) h2(t) h1(t)*h2(t)
[không quan trọng thứ tự của h1(t) và h2(t)] EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U 6
2.2.4. Tích chập và các tính chất Tính chất đạo hàm: dx(t) d dx d h(t) [x(t) (t) h(t)] Hay T T{x(t)} dt dt dt dt Tính dịch thời gian:
x(t t ) h(t) x(t) h(t t ) y(t t ) Với y(t) x(t) h(t) 0 0 0 EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U
Chương 2: Phân tích hệ thống LTI trong miền thời gian
2.3. Phân tích hệ thống LTI dùng tích chập Signals and Systems --HK242--
Tran Quang Viet – FEEE – HCMUT 7
2.3.1. Xác định đáp ứng của HT
a) Đáp ứng với ngõ vào bất kỳ:
B1: Xác định đáp ứng xung h(t) nếu cần
B2: Xác định đáp ứng với ngõ vào f(t) bằng cách tính
y(t) x(t) h(t) h(t) x(t) EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U
2.3.1. Xác định đáp ứng của HT
b) Đáp ứng quá độ s(t): đáp ứng với ngõ vào x(t)=u(t) + t Ta có: s(t)=u(t) h(t)= h( )u(t )d h( )d ds(t) h(t)= dt
Ta có thể quan sát đáp ứng xung thông qua đáp ứng quá độ và ngược lại EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U 8
2.3.1. Xác định đáp ứng của HT
c) Hàm đặc trưng và giá trị đặc trưng: Xét ngõ vào là hàm: st e , khi đó ngõ ra: + + s(t ) s st h( )e d h( )e d e H(s) Hàm giá trị đặc Hay: T{est}=H(s)est đặc trưng trưng của HT
Biến đổi Fourier & Laplace rất quan trọng trong việc phân tích hệ thống LTI EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U
2.3.2. Phân tích tính nhân quả, ổn định của hệ thống LTI
B1: Dùng tích chập viết quan hệ vào ra y(t)=T{x(t)}
B2: Phân tích tính nhân quả và ổn định như chương 1 EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U 9
2.3.2. Phân tích tính nhân quả, ổn định của hệ thống LTI
Hệ quả 1: hệ thống LTI nhân quả khi h(t)=0, t<0 +
Hệ quả 2: hệ thống LTI ổn định khi: | h ( t ) | d t hữu hạn EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U
Chương 2: Phân tích hệ thống LTI trong miền thời gian
2.4. Phân tích hệ thống LTI nhân quả mô tả bởi phương trình vi phân Signals and Systems --HK242--
Tran Quang Viet – FEEE – HCMUT 10
2.4.1. Hệ thống mô tả bởi phương trình vi phân
Là hệ thống được mô tả bởi phương trình vi phân tuyến
tính hệ số hằng cấp n có dạng: n k m k d y(t) d x(t) a b k k k k k= 0 dt k=0 dt EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U
2.4.2. Xác định đáp ứng của HT mô tả bởi PTVP k n m k d y (t) p d x(t) a b k (1) k k k dt dt k= 0 k= 0 n k d y (t) h a 0 (PT thuần nhất) (2) k k k =0 dt
Với ngõ vào f(t), nếu yp(t) thỏa (1) khi đó yp(t)+yh(t) cũng
thỏa (1) với yh(t) thỏa (2) yp(t): Nghiệm riêng
yh(t): Nghiệm phương trình thuần nhất EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U 11
2.4.2. Xác định đáp ứng của HT mô tả bởi PTVP n k d y (t)
Nghiệm phương trình thuần nhất y h a 0 h(t): k k k= 0 dt y y (t) A e h(t) có dạng: λt h n n k λt a Aλ e 0 k
a λ 0 (PT đặc trưng) k k k =0 k= 0 n nghiệm i, i=1,…,n n λ t
Với n nghiệm đơn: y (t) A e k h k k 1
Với r nghiệm lặp và n-r nghiệm đơn: r n k 1 λ t λ t
y (t) A t e r A e k h k k k 1 k r 1 EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U
2.4.2. Xác định đáp ứng của HT mô tả bởi PTVP
Điều kiện đầu: để xác định n hằng số, cần n điều kiện đầu n-1 dy(t) d y(t) y(t), ,..., n-1 dt dt
Thông thường xét tại thời điểm bắt đầu tác động của ngõ
vào và hay khảo sát tại t=0+ n -1 dy(0 ) d y(0 ) y(0 ), ,..., n-1 dt dt
Điều kiện đầu tại t=0+ phụ thuộc vào điều kiện đầu tại t=0-
và ngõ vào. Điều kiện đầu tại t=0- như sau: n-1 dy(0 ) d y(0 ) y(0 ), ,..., n-1 dt dt EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U 12
2.4.2. Xác định đáp ứng của HT mô tả bởi PTVP
2 thành phần của đáp ứng: n k m k d y (t) d x(t) a zs b k k k k k= 0 dt k = 0 dt Zero-state response n-1 y (t) dy (0 ) d y (0 zs f (t) ) y (0 )= zs ... zs 0 zs n-1 dt dt y (t) n k d y (t) a zi 0 k k y (t) k= 0 dt Zero-input zi response n -1 dy (0 ) d y (0 ) y (0 ), zi ,..., zi zi n -1 dt dt EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U
2.4.3. Các thuộc tính của HT mô tả bởi PTVP
Hệ thống: yzs(t)=Tzs{x(t)} là LTI và nhân quả hệ
thống ở “trạng thái nghỉ” như sau: x(t)=0 khi t n-1 dy (t ) d y (t ) zs 0 zs 0 y (t )= ... 0 zs 0 n -1 dt d t
Hệ thống: y(t)=T{x(t)}=yzi(t)+Tzs{x(t)} không thỏa tính
chất LTI nếu yzi(t)0 hay điều kiện đầu tại t=0- khác không. EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U 13
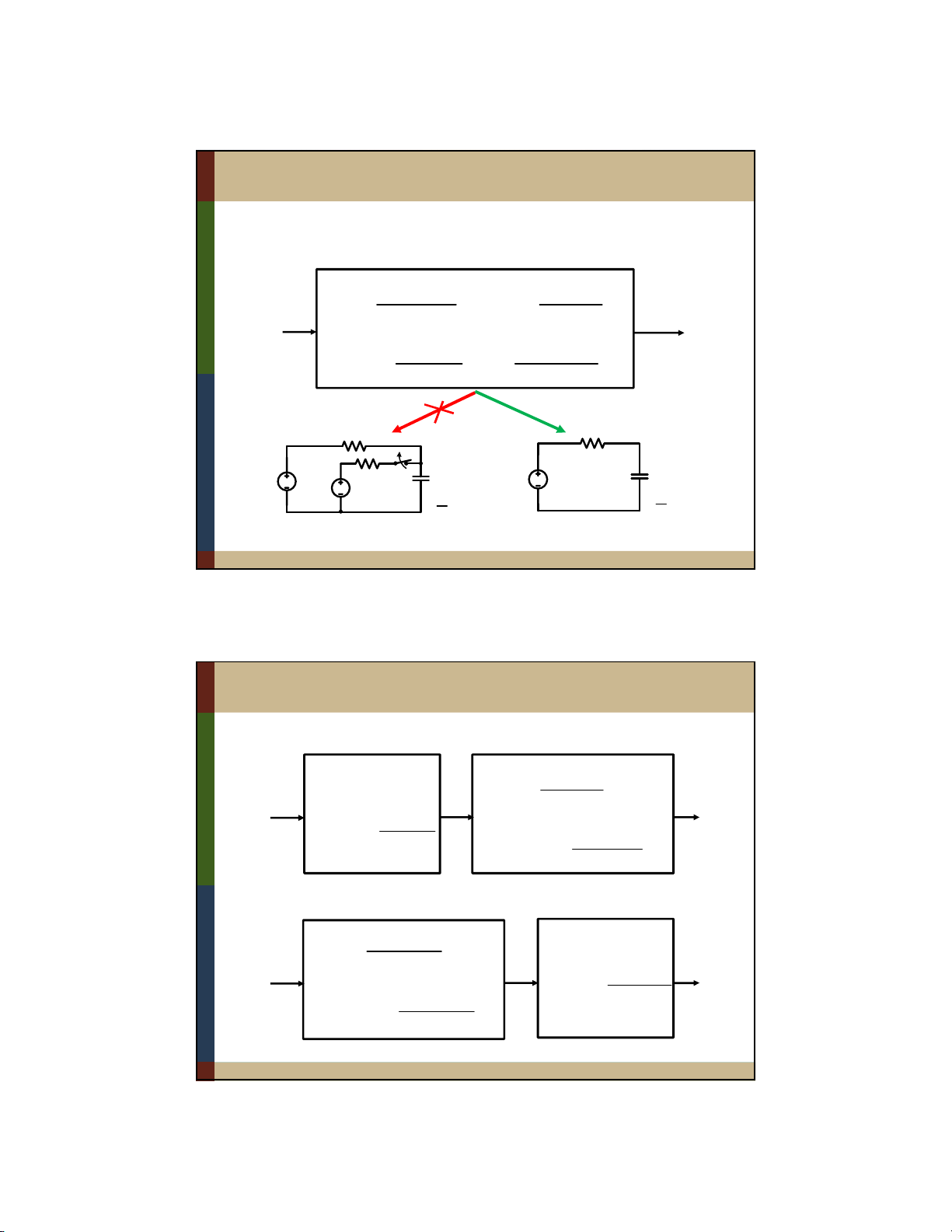
2.4.4. Hệ thống LTI nhân quả mô tả bởi PTVP
Là hệ thống được mô tả bởi phương trình vi phân tuyến
tính hệ số hằng cấp n ở trạng thái nghỉ, khi đó y(t)=yzs(t) n k m k d y (t) d x(t) a zs b k k k k y (t) zs k= 0 dt k = 0 dt f (t) n-1 dy (0 ) d y (0 y (t) ) y (0 )= zs ... zs 0 zs n-1 dt dt R R SW + + R t=0 v v C i(t) vo(t) v C o(t) i(t) 5V Nhân quả, không thỏa LTI LTI, nhân quả EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U
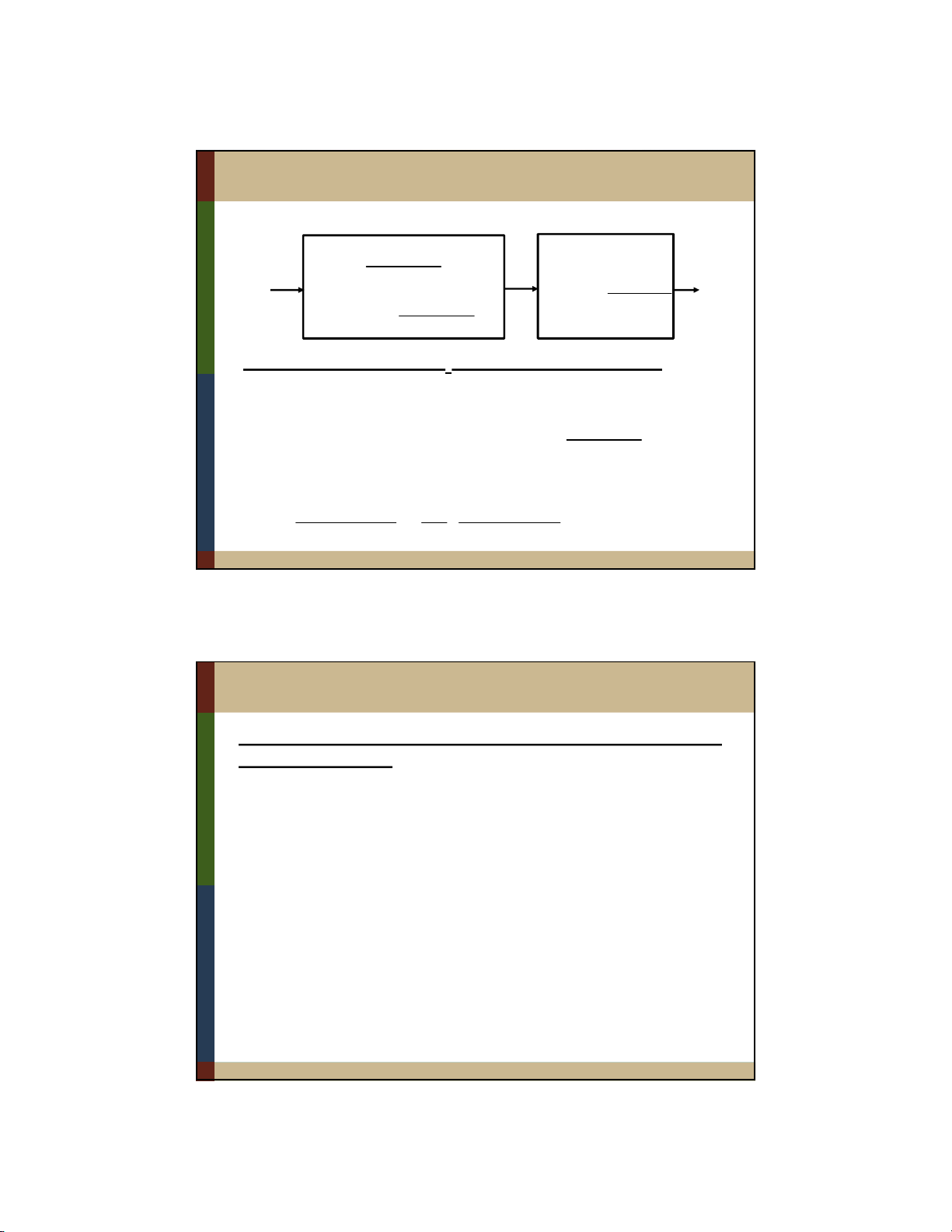
2.4.5. Đáp ứng xung của HT LTI nhân quả mô tả bởi PTVP
Tách hệ thống thành 2 hệ thống con như sau: n k d y(t) w (t) w (t) a w (t) k k m k k= 0 dt x (t) d x(t) y (t) b n -1 k k d y(0 ) k= 0 dt y(0 )=... 0 n-1 dt
Cả 2 hệ thống là LTI nên có thể thay đổi thứ tự của chúng: n k d y (t) a a x(t) y (t) k k y (t) k= 0 dt a m k x (t) d y (t) b a y (t) k n-1 k d y (0 dt ) y (0 )=... a 0 k =0 a n-1 d t EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U 14
2.4.5. Đáp ứng xung của HT LTI nhân quả mô tả bởi PTVP
Đáp ứng xung của hệ thống được xác định như sau: n k d h (t) h(t) a a (t) k k h (t) a m k d h (t) k= 0 dt a h (t) (t) b n-1 d h (0 k k ) dt h (0 )=... a 0 k =0 a n-1 d t
Trong đó đáp ứng xung ha(t) được xác định như sau:
Hệ thống ở trạng thái nghỉ nên: ha(t)=0 khi t<0 n k d h (t) Khi t>0: h a a 0 a(t) là nghiệm của: k k k= 0 dt
Điều kiện đầu tại t=0+: n-1 n-2 d h (0 ) 1 d h (0 ) a ; a ... h (0 ) 0 n -1 n-2 dt a dt a n EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U
2.4.6. Đáp ứng của HT LTI nhân quả mô tả bởi PTVP
Để xác định đáp ứng của hệ thống với ngõ vào bất kỳ x(t) ta dùng các bước sau:
Xác định đáp ứng xung h(t) của hệ thống
Sử dụng tích chập để xác định ngõ ra y(t) y (t) x (t) h(t)
(trong một số trường hợp có thể kết hợp với tính chất LTI để
việc tính toán đơn giản hơn) EE 2 Si0 g1 n 5 a l:s S a ig n n d a S ls y st& e S m y s stems --HK242-- T ra T n r a Q n ua Q n uag n V g ie Vi t e – t –FE F E E E E E - –HC H M C U M T U 15
Tài liệu liên quan:
-

Bài giảng Bài 2: Hệ thống môn Tín hiệu và hệ thống | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội
24 12 -

Bài giảng Bài 1: Tín hiệu môn Tín hiệu và hệ thống | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội
24 12 -

Bài giảng Bài 6: Biểu diễn tần số của tín hiệu không tuần hoàn môn Tín hiệu và hệ thống | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội
18 9 -

Đề thi cuối học kỳ 1 2024-2025 môn Tín hiệu hệ thống | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội
58 29