Bài tập lớn môn Kỹ thuật Điều khiển tự động | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội
Bài tập lớn môn Kỹ thuật Điều khiển tự động | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội. Tài liệu được sưu tầm giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem.
Môn: Điều khiển tự động (UET) 3 tài liệu
Trường: Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội 823 tài liệu
Tác giả:



Preview text:
Bài tập lớn Môn học Kỹ thuật Điều khiển tự động
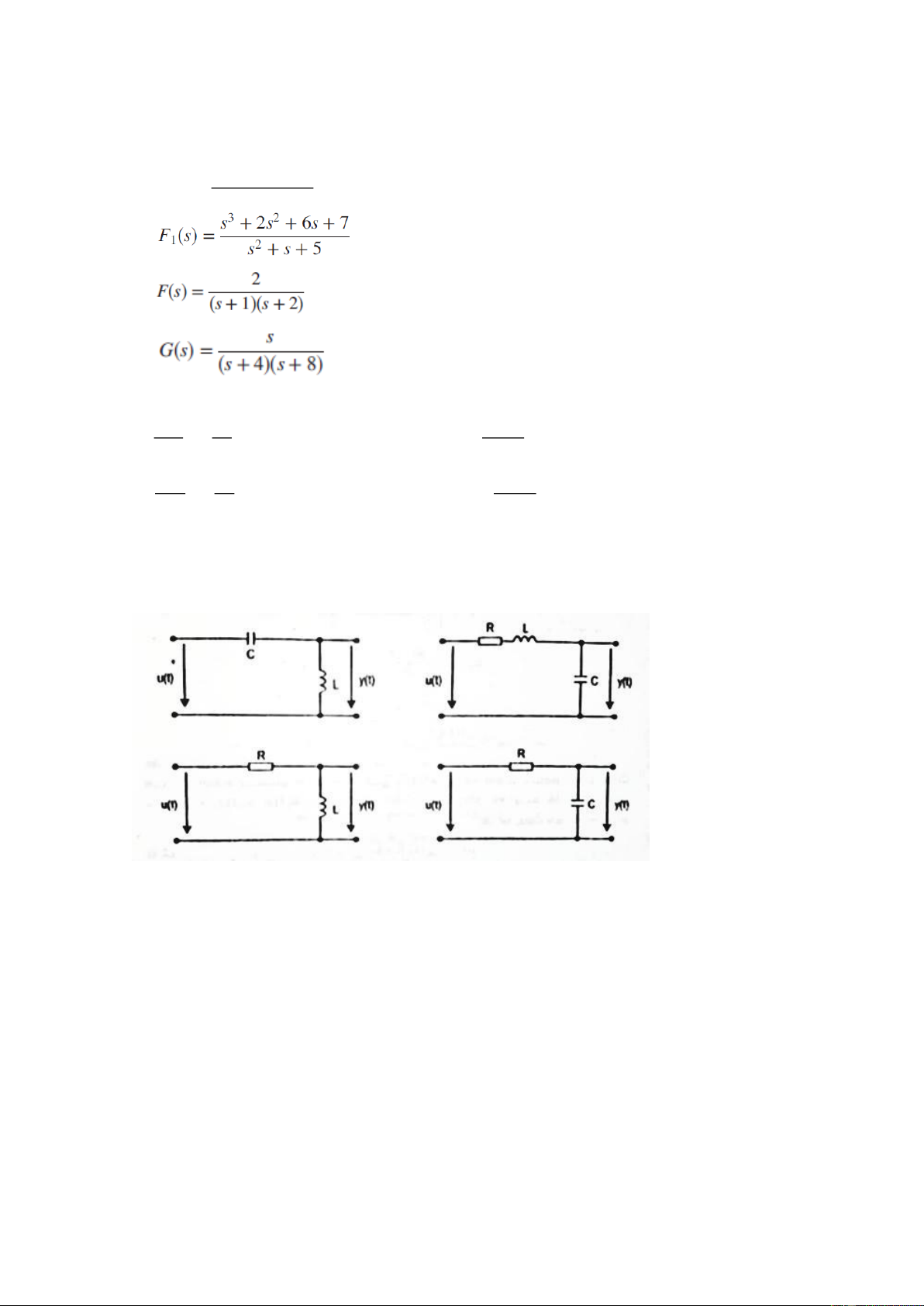
Bài tập 1: Tìm tín hiệu có ảnh Laplace như các trường hợp dưới đây: 2 2s +13s +17 a, X(s) = ; 2 s + 4s + 3 b, c, d,
Bài tập 2: Tìm nghiệm của các phương trình vi phân sau: 2 d x + dx dx 4 + 5x =1; với (0) x(0) = 1, = 1 − 2 a, dt dt dt 2 d y dy + dy 2 + 5y = 3 ; với (0) y(0) = 0, = 0 2 b, dt dt dt
Bài tập 3: Viết phương trình vi phân mô tả mạch điện và tìm nghiệm của phương trình vi phân.
Bài tập 4: Cho sơ đồ mạch điện: 1
a.Viết phương trình vi phân mô tả mạch điện.
b.Viết hàm truyền mô tả mạch điện.
c.Viết phương trình trạng thái mô tả mạch điện.
Bài tập 5: Cho hệ thống có phương trình vi phân, viết phương trình trạng thái mô tả hệ thống 4 3 2 3 2 d y d y d y dy d u d u du + 3 + 2 +11 + 3y = 2 + 5 + 7 + 3u 4 3 2 3 2 a, dt dt dt dt dt dt dt 4 3 2 2 d y d y d y dy d u du + + 7 + 2 + 5y = 3 + 2 + 4u 4 3 2 2 b, dt dt dt dt dt dt 4 3 2 d y d y d y dy 3 + 5 + 4 + + 6y = 3u 4 3 2 c, dt dt dt dt 4 3 2 d y d y d y dy 6 + 9 + + + 3y = 12u 4 3 2 d, dt dt dt dt 4 3 2 d y d y d y dy du 4 + 3 + + 2 + 3y = 2 + u 4 3 2 e, dt dt dt dt dt Bài tập 6: 2
Cho hệ thống được mô tả bằng phương trình trạng thái: X = A.X + B r . . c = C.X Cho hệ thống được x = A.x + B.r
mô tả bằng phương trình trạng thái:
. r là tín hiệu vào, c là tín hiệu ra, x là c = C.x
vector biến trang thái. Tìm hàm truyền của hệ thống, biết các ma trận trạng thái: 2 3 2 a, A = , B = ,C = 3 4 2 4 5 1 3 − 2 b, A = , B = ,C = 1 5 2 2 3 4 1 − 2 c, A = , B = ,C = 1 2 2 2 3
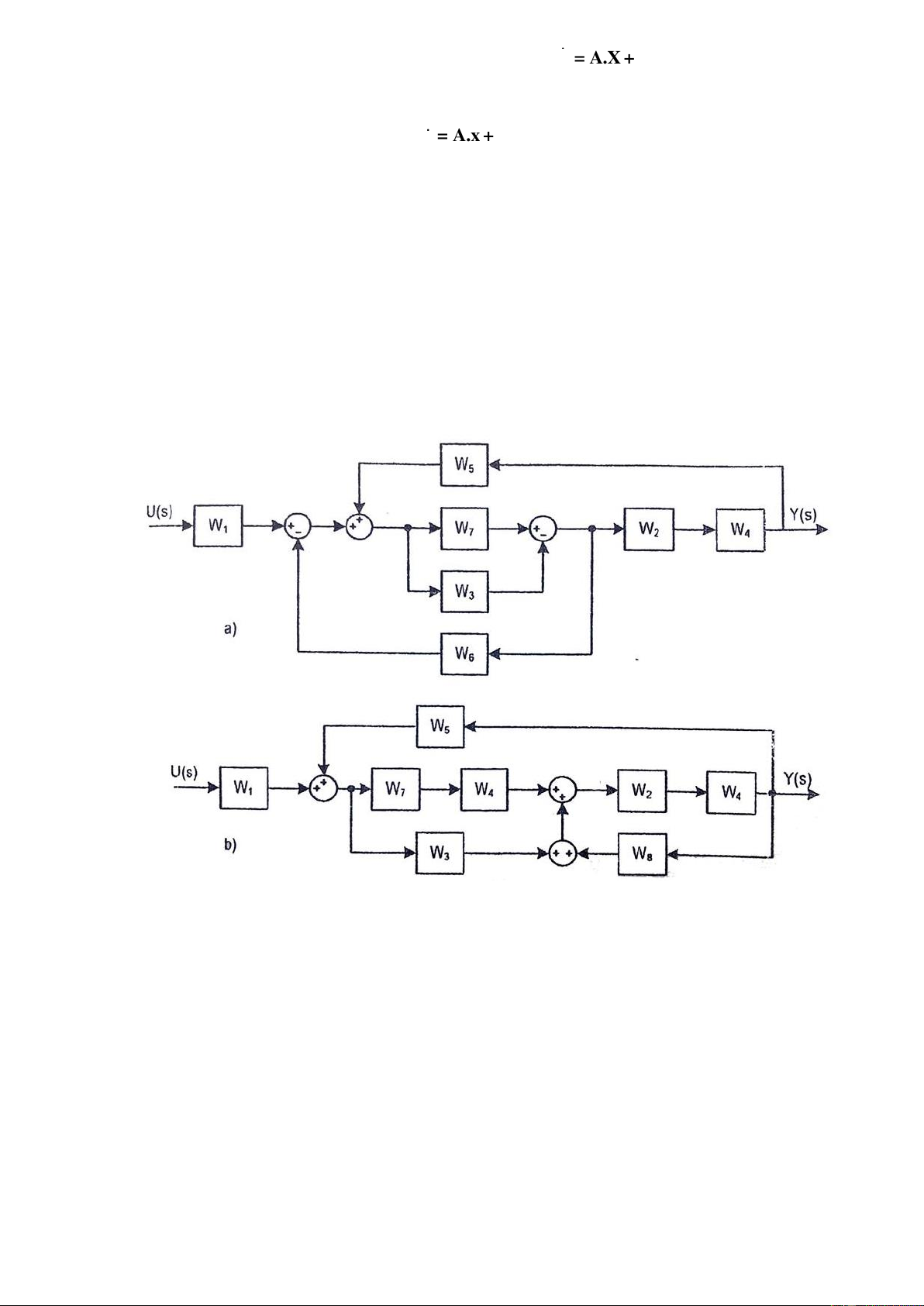
Bài tập 7: Đơn giản và viết hàm truyền của hệ thống sau: 3 4
Bài tập 7: Sử dụng công thức mason viết hàm truyền cho hệ thống sau:
Bài tập 8: Hãy xây dựng đặc tuyến tần số biên độ logarit của hàm truyền đạt sau: 50 4s + 2 1.W (s) ( ) = s (3s + ) 1 10s 2s + 4 2.W (s) ( ) = 3s +1 s 3.W (s) 2 10 = 2s +1 s 4s +1 4.W (s) ( ) = ( 2s + ) 1 (3s + ) 1 3s + 6 5.W (s) = ( 2s + )2 1 3s + 4 6.W (s) = ( 2s + ) 1 (5s + 4)
7.W (s) = 10(20s + 5) 2 s 4s +1 8.W (s) ( ) = ( 2s + ) 1 (3s + ) 1 1 9.W (s) = 100(5s + 3) 5
Bài tập 9: Sử dụng tiêu chuẩn Routh – Hurwitz để kiểm tra tính ổn định hệ có phương trình đặc tính. a) A(s) = 4 3 2
11.2s + 0.8s + 2.s + s + 0.5 b) A (s) 3 2
= s + 8s +10s + 5 c) A(s) = 5 4 2
2s + 3s + 4s + 0.3s + 20 d) A(s)= 5 4 2
s + 6s + s + s + 2
Bài tập 10: Cho hàm truyền đạt của hệ thống. Với giá trị nào của k thì hệ thống ổn định: 3 2 s + 2.s +1 a) W(s)= 4 3 2
s + 3.s + 4.k.s + 2.s + 2 3 2
2.s + 2.s + s + 5 b) W(s)= 4 3 2
k.s + 8.s + 4s + s +1 s +1 c) W(s)= 4 2.s + (k − ) 3 2
1 .s + s + s + 6 2 4s −1 d) W(s)= 3 4.s + ( 2 k − ) 2 1 .s + 2.s +1
Bài tập 11: Cho hệ thống hở có hàm truyền đạt: K W p = h (
) (s+ )1(2s+ )1(4s+ )1(5s+ )1
Xây dựng quỹ đạo nghiệm số cho hệ thống kín. Page 6

