Báo cáo bài tập nhóm thiết kế phần cứng dùng FPGA | Trường Cao Đẳng Công Nghệ Bách Khoa Hà Nội
Báo cáo bài tập nhóm thiết kế phần cứng dùng FPGA của Trường Cao Đẳng Công Nghệ Bách Khoa Hà Nội. Tài liệu được biên soạn dưới dạng file PDF gồm 9 trang giúp bạn tham khảo, ôn tập hiệu quả và đạt điểm cao trong kỳ thi sắp tới. Mời bạn đọc đón xem!
Môn: Hệ thống điều khiển nhúng 1 tài liệu
Trường: Trường Cao đẳng Công Nghệ Bách Khoa Hà Nội 106 tài liệu
Tác giả:



Preview text:
MỤC LỤC
Bài 4: Vẽ lại mạch giải mã ở Slide15 trên Quartus/Block Diagram 9
Bài 5: Vẽ lại mạch giải mã ở Slide19 trên Quartus/Block Diagram 10
2
Bài 1: Đo độ rộng xung
- Đầu vào xung PulseIn, clk (us).
- Đầu ra D[15:0] chỉ độ rộng xung PulseIn (đơn vị: us).
- Sử dụng khối lpm_counter trong Megafunctions/Arithmetic
- Chốt được dữ liệu ngõ ra khi PulseIn xuống 0, bắt đầu đo khi PulseIn lên 1
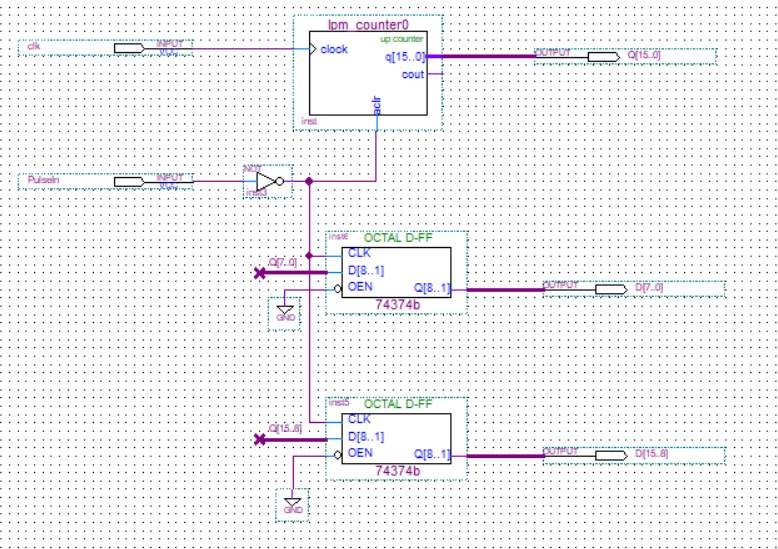
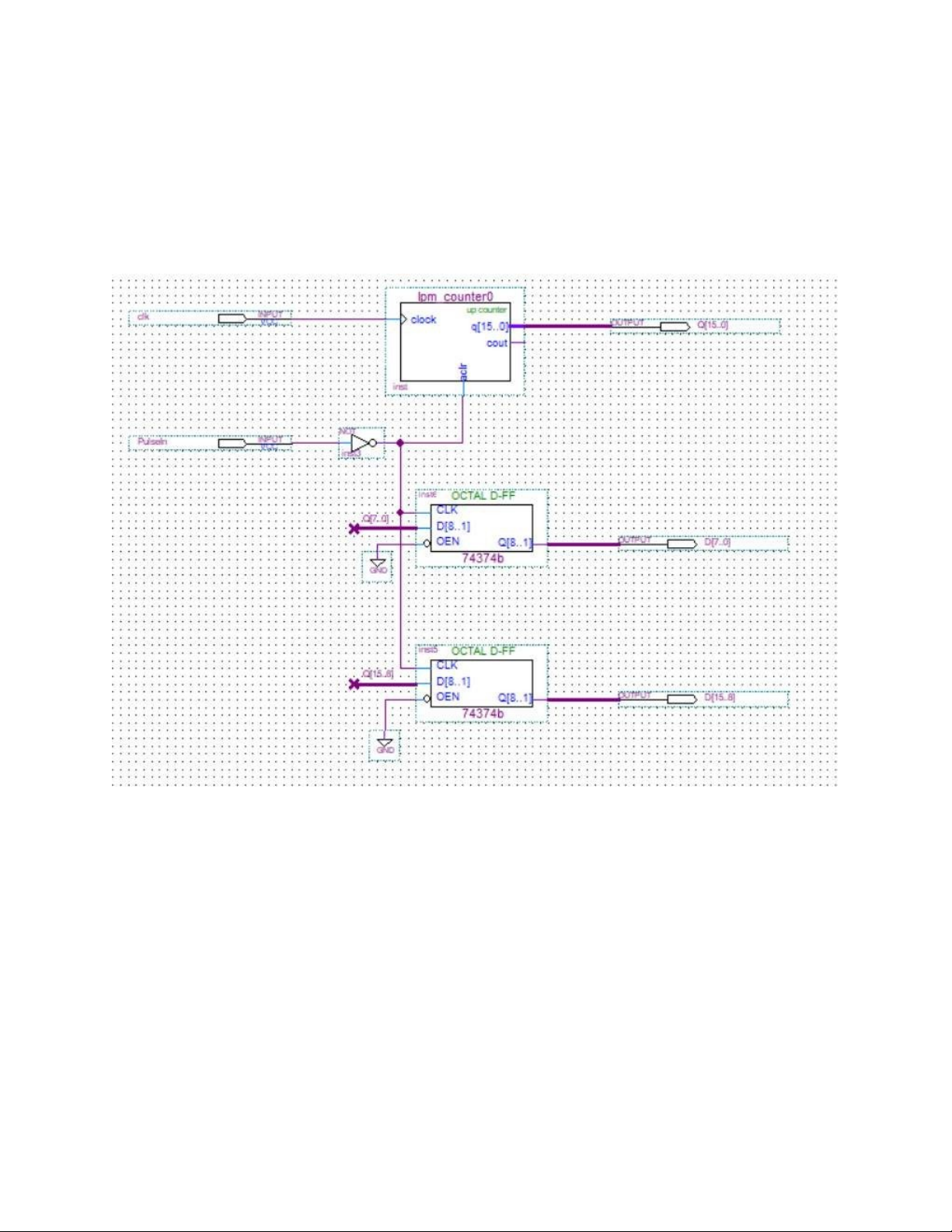
Hình 1: Mạch mô phỏng đo độ rộng xung
Nguyên lý hoạt động:
- Dùng 1 bộ đếm lpm_counter để đếm 16 bit (Q[15:0]), xung clock là xung CLK 1us, xung PulseIn dùng để reset bộ đếm, PulseIn sẽ đi qua cổng NOT để cung cấp tín hiệu cho
chân aclr của khối lpm_counter.
- Khi PulseIn lên 1 thì lpm_counter thực hiện đếm lên, khi xung CLK có cạnh lên thì ngõ ra sẽ tăng một đơn vị.
3
- Khi PulseIn xuống 0 thì 2 khối IC 74374 sẽ thực hiện chốt dữ liệu Q[15..0] ra ngõ ra D[15..0], đồng thời chân aclr được set lên 1 và thực hiện reset bộ đếm.
Kết quả mô phỏng:
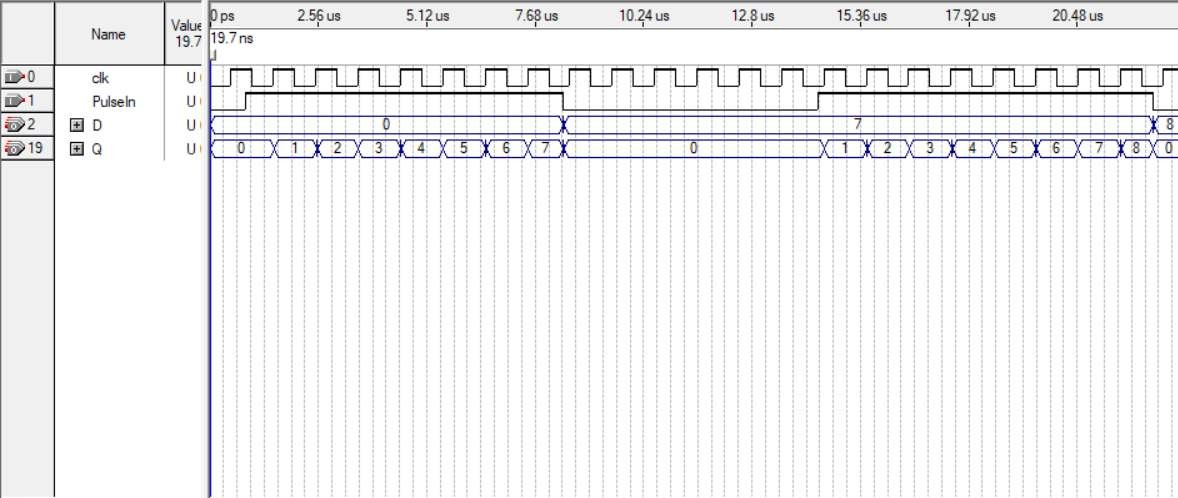

Nhận xét: kết quả mô phỏng chính xác, tại các cạnh xuống của xung PulseIn thì ngõ ra Q[15..0] của bộ đếm được reset về 0, ngõ ra D[15..0] của các IC chốt sẽ giữ giá trị đếm được của ngõ ra Q.
4
Bài 2: Hiển thị LED 7 đoạn
- Đầu vào xung clk (1us)
- Đầu ra D[6:0]: dữ liệu LED 7 đoạn (cực âm chung)
- Số LED hiển thị : 1
- Hiển thị từ 0ms – 9ms, sau đó lặp lại
- Giải mã LED bằng IC 7447
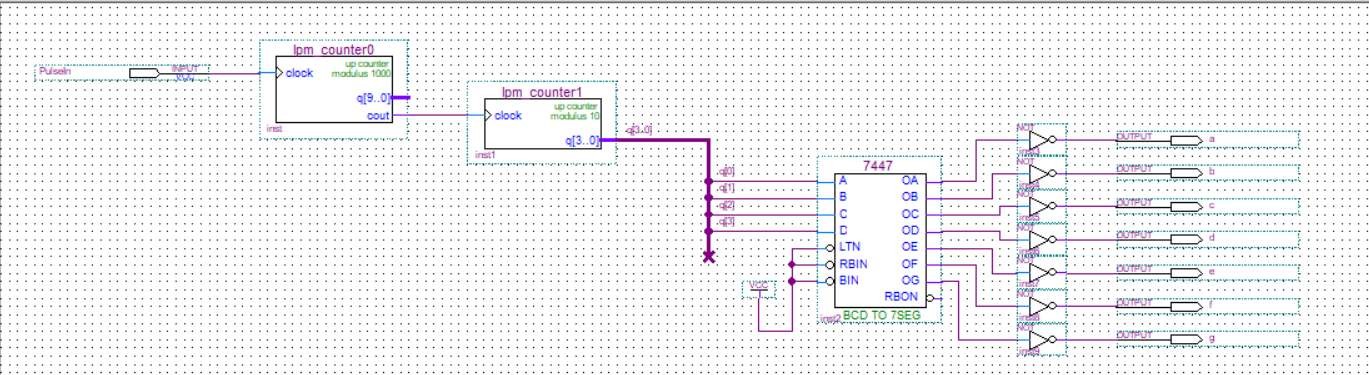
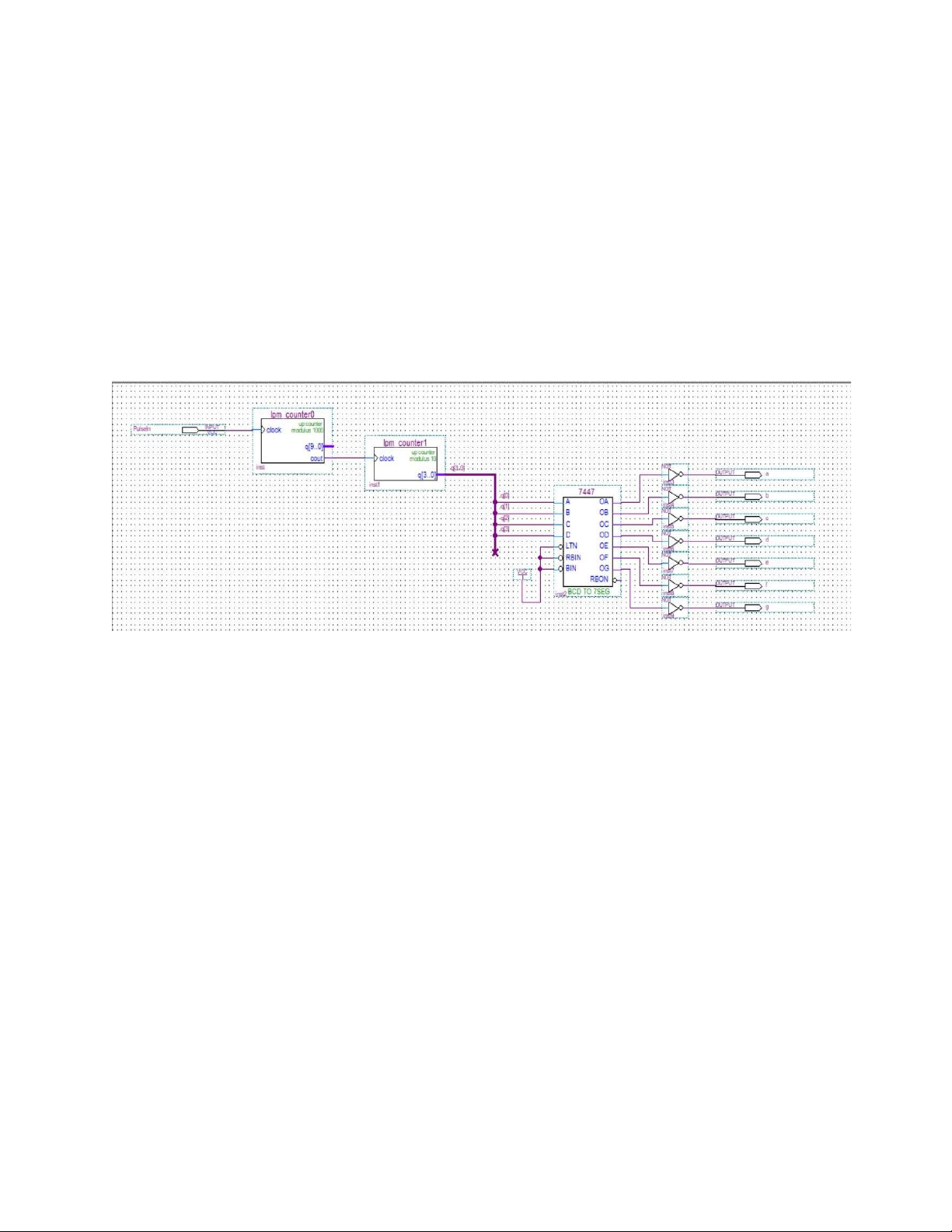
Hình 2: Mạch mô phỏng giải mã LED 7 đoạn
Nguyên lý hoạt động:
- Bộ lpm_counter0 nhận xung đầu vào PulseIn = 1us, ngõ ra Q[0..9] có thể đếm được đến 1000, Modulus = 1000 để xuất ra chân Cout xung clock 1ms.
- Bộ lpm_counter1 lấy xung clock đầu vào là Cout 1ms, Modulus = 10 đếm từ 0-9 rồi lặp lại. Các ngõ ra Q[0..3] đưa vào 7447, ngõ ra 7447 qua cổng NOT để xuất ra LED 7 đoạn.
5
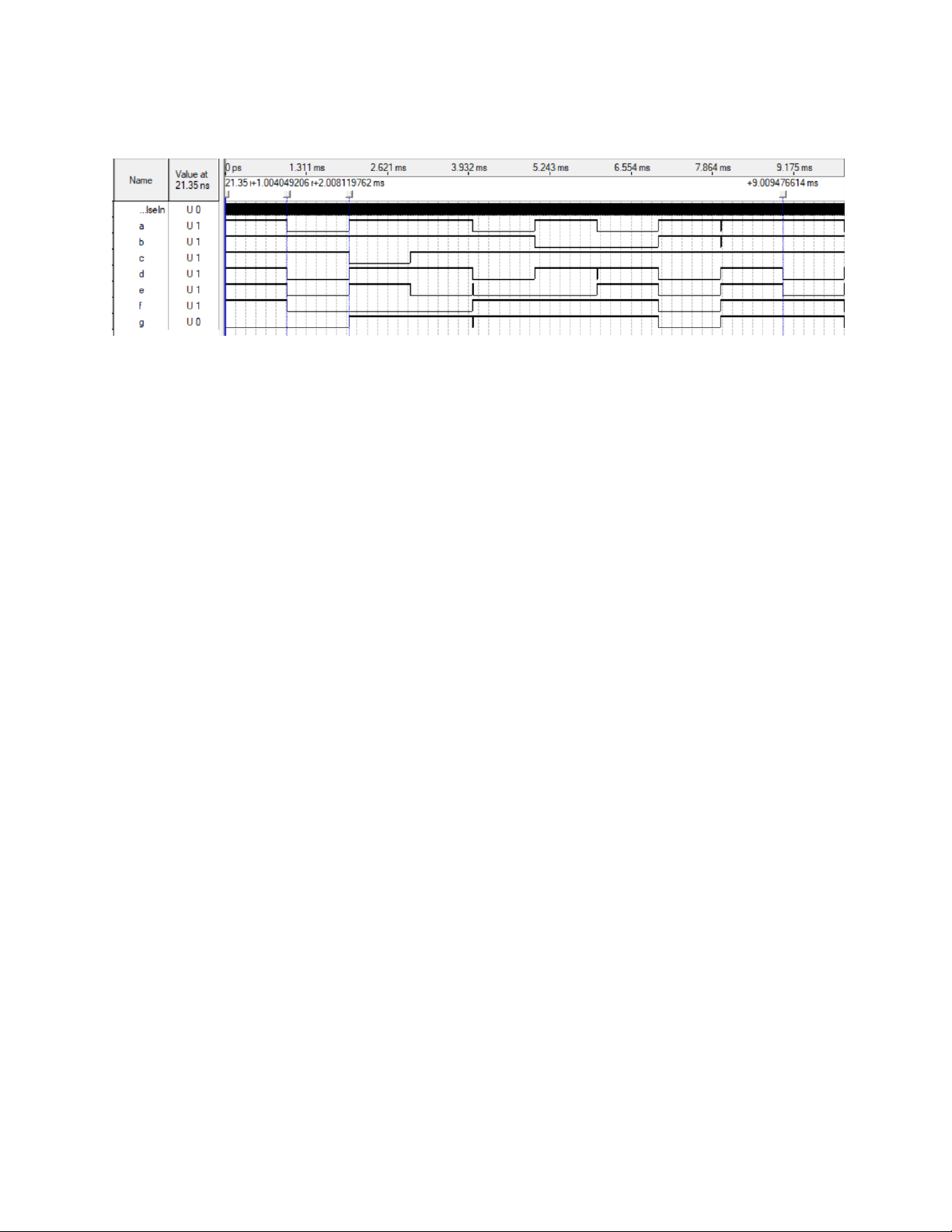
Mô phỏng:
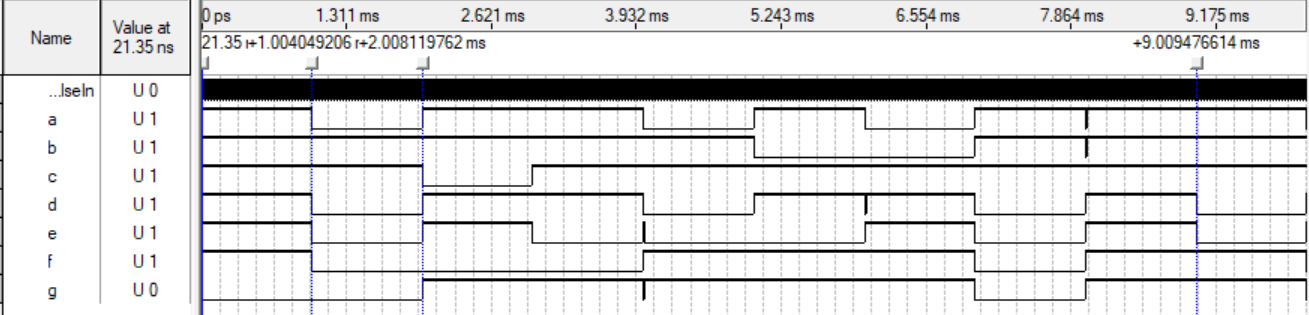
Nhận xét: Mô phỏng phù hợp với yêu cầu đề bài.
6
Bài 3: Điều rộng xung
- Đầu vào T (8bit), Ton (8bit), clk (1us).
- Đầu ra PwmOut.
- Độ phân giải 8 bit (255 mức).
- Ton, T chỉ thay đổi 1 lần đầu lúc khởi động, T = 10.
- Sử dụng khối lpm_counter và lpm_cpmpare trong Megafunctions/Arithmetic.
Quy tắc thiết kế: Điều rộng xung dựa trên giá trị T, Ton, clk. Đếm xung clk, khi giá trị
đếm (counter)
Ton
thì PWM =1, khi giá trị đếm vượt quá Ton thì giá trị PWM =0 và khi
giá trị đếm tới T thì reset giá trị đếm về 0. Mạch thiết kế:

Hình 3: Mạch mô phỏng điều rộng xung
- lpm_counter0: đếm số xung của clk chu kỳ 1us với ngõ ra Q[7..0] là giá trị đếm xung.
7
- lpm_compare0: so sánh giá trị đếm của xung với Ton để xuất ra xung PWM.
- lpm_compare1: so sánh giá trị đếm của xung với T, nếu giá trị đếm vượt quá T thì kích clr để reset bộ đếm lpm_counter0.
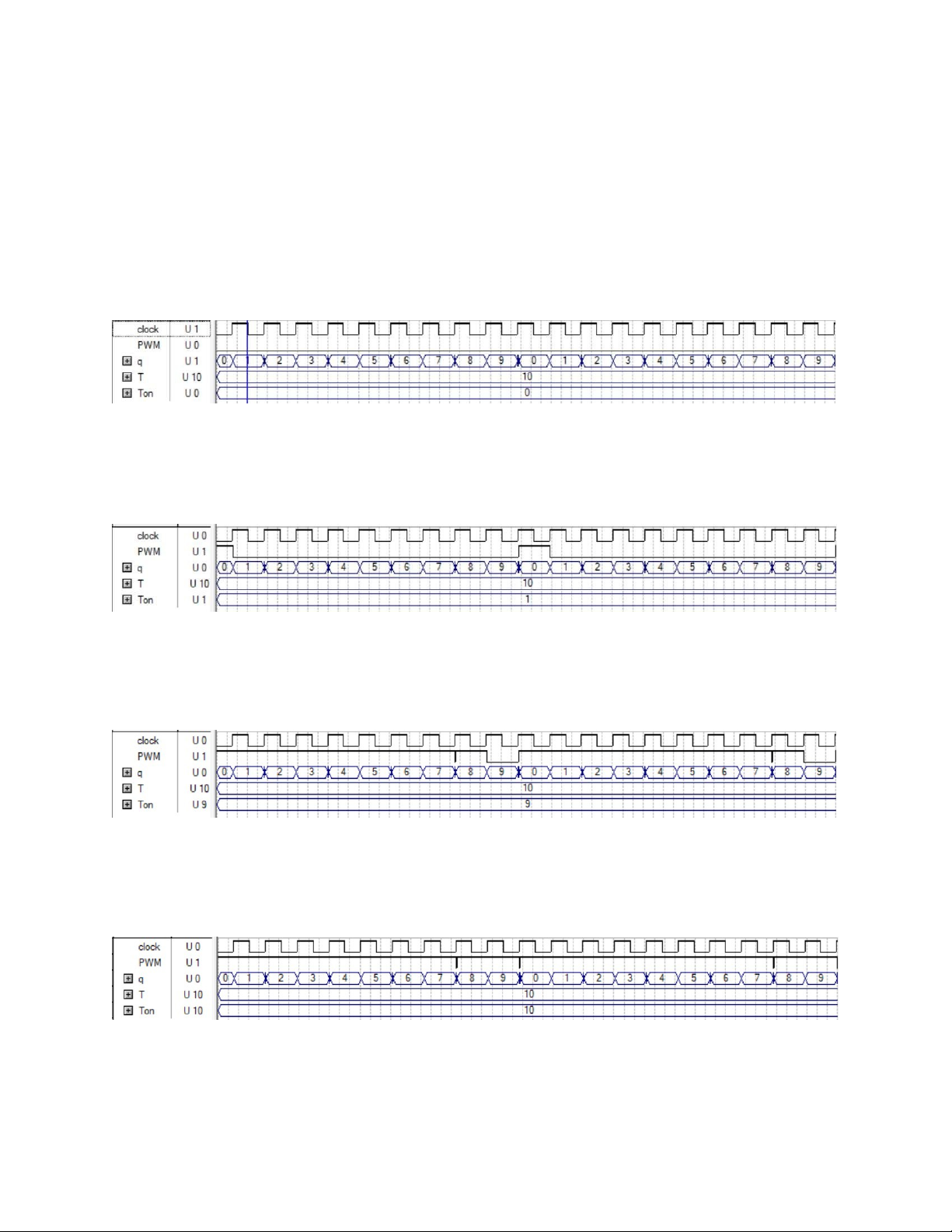
Kết quả mô phỏng:
- T = 10, Ton = 0:

Xung PWM luôn bằng 0 do giá trị đếm counter luôn lớn hơn Ton
- T = 10, Ton = 1:

PWM có xung bằng 1 tới giá trị 1 sau đó hạ xuống về 0.
- T = 10, Ton = 9:

Xung PWM bằng 1 tới khi Q đếm tới 9 sau đó xuống 0 tại 10
- T = 10, Ton = 10:

Ta thấy xung PWM luôn bằng 1 do giá trị counter luôn nhỏ hơn Ton
Từ kết quả mô phỏng ta thấy mạch thiết kế thỏa yêu cầu đề bài.
8
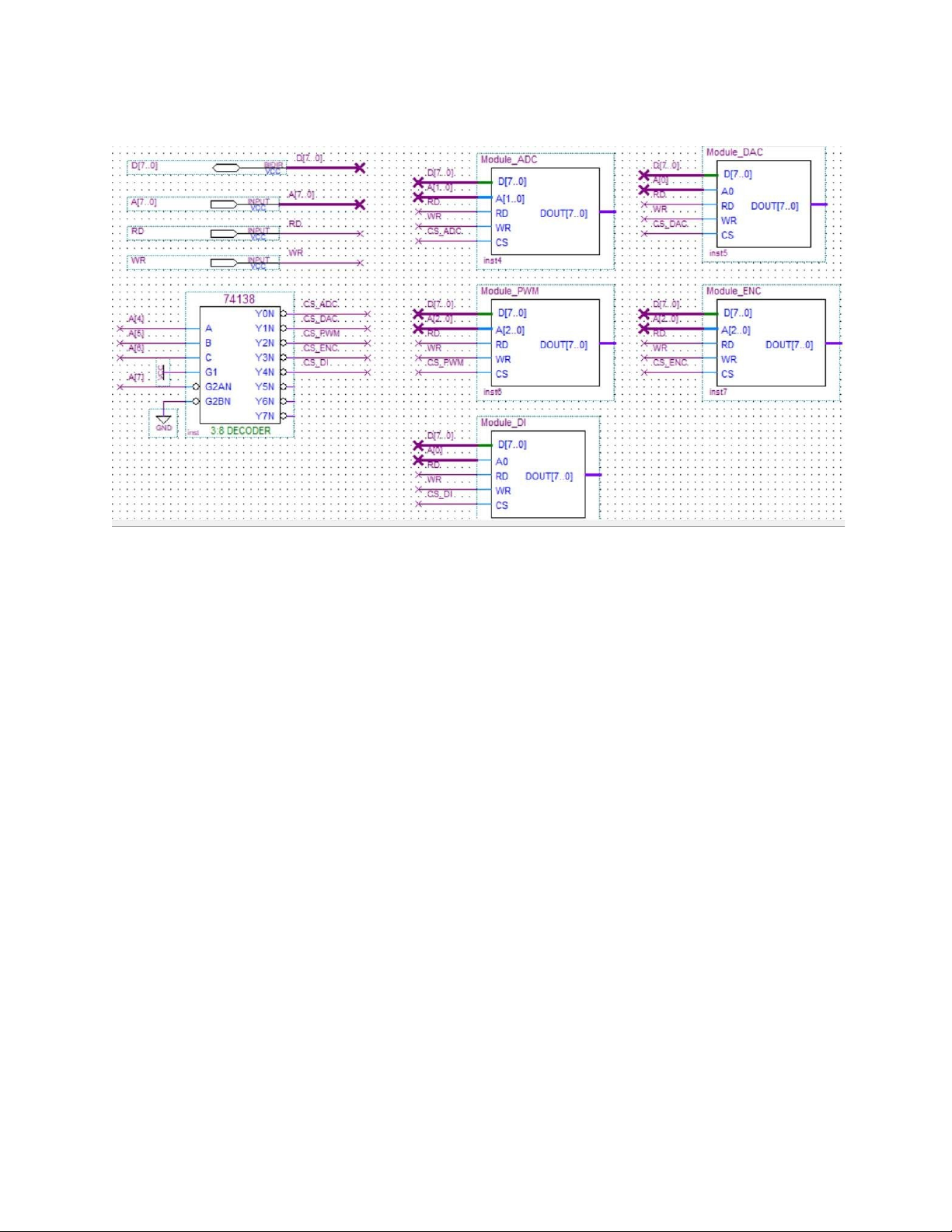
Bài 4: Vẽ lại mạch giải mã ở Slide15 trên Quartus/Block Diagram

Tầm địa chỉ:
CS_ADC: 0x00 – 0x03 CS_DAC: 0x10 – 0x11 CS_PWM: 0x20 – 0x25 CS_ENC: 0x30 – 0x35 CS_DI: 0x40 – 0x41
9
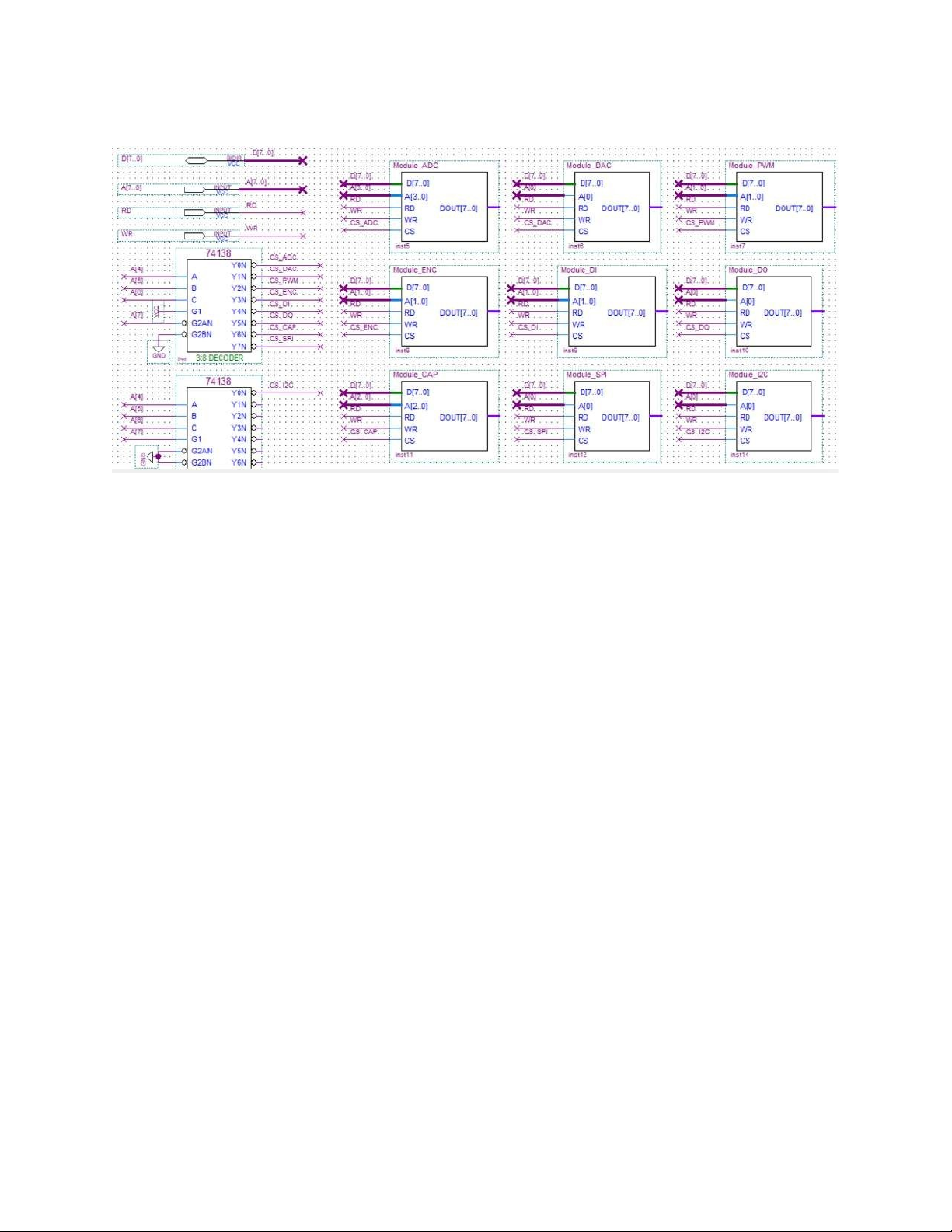
Bài 5: Vẽ lại mạch giải mã ở Slide19 trên Quartus/Block Diagram
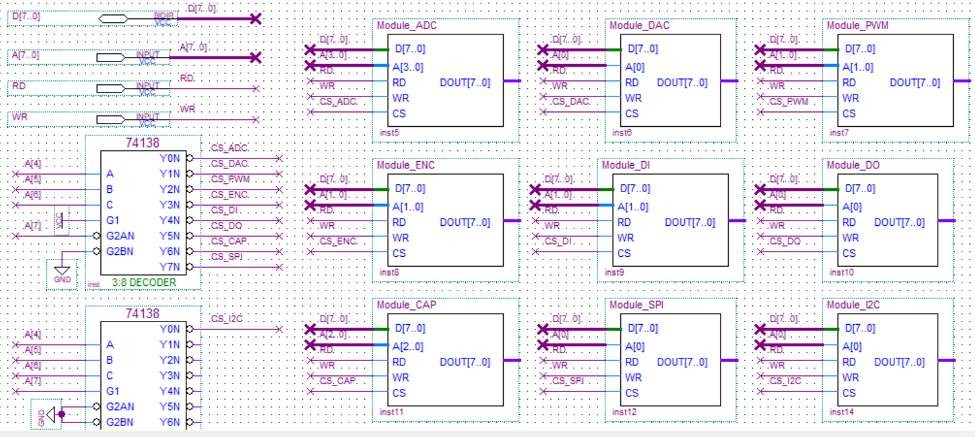
Tầm địa chỉ:
CS_ADC: 0x00 – 0x0F CS_DAC: 0x10 – 0x11 CS_PWM: 0x20 – 0x23 CS_ENC: 0x30 – 0x33 CS_DI: 0x40 – 0x43 CS_DO: 0x50 – 0x51 CS_CAP: 0x60 – 0x65 CS_SPI: 0x70
CS_I2C: 0x80
10