Báo cáo kỹ thuật Nguyên cứu, thiết kế và chế tạo Robot voi | Báo cáo môn điện tử viễn thông Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
Thuật ngữ robot được sinh ra từ sân khấu, không phải sinh ra ở xưởng sản xuất. Những robot xuất hiện đầu tiên ở NewYork vào ngày 09/10/1922 trong vở “Rossum’s Universal Robot” của người soạn kịch người Tiệp Karen Kapek viết năm 1921. Trong tác phẩm này nhân vật Rossum và con trai của ông đã tạo ra những chiếc máy gần giống con người để hầu hạ con người. Chiếc
Robot công nghiệp được đưa vào ứng dụng đầu tiên, năm 1961 ở một nhà máy ô tô của General motor tại trenton, Mỹ. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Điện tử viễn thông 4 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:











Preview text:
ĐẠI HỌC SƯ PHẠM KỸ THUẬT THÀNH PHỐ HỒ CHÍ MINH
KHOA ĐÀO TẠO CHẤT LƯỢNG CAO
---*** ***--- BÁO CÁO KỸ THUẬT
NGHIÊN CỨU THIẾT KẾ XÂY DỰNG ROBOT VOI Nhóm : Engineers
Student: Đỗ Phúc Duy - 22161102
Đỗ Hoàng Tuấn - 22161205
Nguyễn Hoàng Nhật Bảo - 22161091
Dương Ngọc Vinh - 22161214
Bàng Xuân Trường - 22161202 Học viên năm : 2022-2026 Chuyên ngành
: Kĩ thuật công nghệ điện tử viên thông
Giảng viên : Bùi Thị Tuyết Đan
Ho Chi Minh City, December, 2022
CỘNG HÒA XÃ HỘI CHỦ NGHĨA VIỆT NAM
Độc lập-Tự do-Hạnh phúc
Thành phố Hồ Chí Minh, ngày 01 tháng 12 năm 2022 ĐỀ TÀI
Nhóm: Engineers Họ tên sinh viên Mã số sinh viên Đỗ Phúc Duy 22161102 Đỗ Hoàng Tuấn 22161205
Nguyễn Hoàng Nhật Bảo 22161091 Dương Ngọc Vinh 22161214 Bàng Xuân Trường 22161202
Chuyên ngành: Kỹ thuật công nghệ điện tử viễn thông.
Hệ đào tạo: Đào tạo chất lượng cao. Năm học: 2022-2026. Lớp: 02CLC. I- DỰ ÁN:
Nguyên cứu, thiết kế và chế tạo Robot voi I. Nhiệm vụ I.1. Thu thật dữ liệu I.2. Nội dung dự án: Dựng mô hình
Xây dựng cơ sở điều khiển chuyển động
Xây dựng thiết bị điều khiển
1.3. Kết quả thí nghiệm III. NGÀY BỔ NHIỆM: 28/11/2022 IV. NGÀY HOÀN THÀNH: 05/12/2022 V. ADVISOR: My-Ha Le, Ph.D.
Ho Chi Minh City, December 2022 Ho Chi Minh City,July 2019 ADVISOR HEAD OF DEPARTMENT
CỘNG HÒA XÃ HỘI CHỦ NGHĨA VIỆT NAM
Độc lập-Tự do-Hạnh phúc
Thành phố Hồ Chí Minh, ngày 01 tháng 12 năm 2022 TIẾN ĐỘ DỰ ÁN:
Nhóm: Engineers
Chuyên ngành: Kỹ thuật công nghệ điện tử viễn thông.
Hệ đào tạo: Đào tạo chất lượng cao. Năm học: 2022-2026. Lớp: 02CLC. Week/ Date Content ADVISOR confirmation 26-10-2022 Lên kế hoạch 27-10-2022 Tìm hiểu cuộc thi 28-10-2022
Tham khảo tư liệu về robot 05-11-2022
Tham gia buổi training CLB Sáng tạo và ứng dụng 08-11-2022
Tìm hiểu đồ dùng và thiết bị 09-11-2022
Tiền hành mua thiết bị và đồ dùng cần thiết 13-11-2022 Tiến hành làm robot 27-11-2022 Hoàn thành robot 28-11-2022
Kiểm tra hoạt động của robot
Faculty of High Quality Training – HCMUTE 03-12-2022
Thi đấu robot tại cuộc thi Animal robot 04-12-2022 Viết báo cáo kĩ thuật 14-12-2022
Thi đấu robot tại lớp nhập môn 21-12-2022
Báo cáo dự án và thuyết trình
Ho Chi Minh City, 05 December 2022 ADVISOR
CỘNG HÒA XÃ HỘI CHỦ NGHĨA VIỆT NAM
Faculty of High Quality Training – HCMUTE
Độc lập-Tự do-Hạnh phúc
Thành phố Hồ Chí Minh, ngày 01 tháng 12 năm 2022
ADVISOR’S COMMENT SHEET
Nhóm: Engineers Họ tên sinh viên Mã số sinh viên Đỗ Phúc Duy 22161102 Đỗ Hoàng Tuấn 22161205
Nguyễn Hoàng Nhật Bảo 22161091 Dương Ngọc Vinh 22161214 Bàng Xuân Trường 22161202
Chuyên ngành: Kỹ thuật công nghệ điện tử viễn thông.
Hệ đào tạo: Đào tạo chất lượng cao. Năm học: 2022-2026. Lớp: 02CLC COMMENT 1. Thesis’s content:
- ................................................................................................................................................
- ................................................................................................................................................ 2. Advantage:
- ................................................................................................................................................
- ................................................................................................................................................ 3. Disadvantage:
- ................................................................................................................................................
4. Propose defending thesis?
- ................................................................................................................................................ 5. Rating:
-.................................................................................................................................................
6. Mark:......................(In Writing:).....................................................................................
Ho Chi Minh City, December 2022 ADVISOR
CỘNG HÒA XÃ HỘI CHỦ NGHĨA VIỆT NAM
Độc lập-Tự do-Hạnh phúc
Faculty of High Quality Training – HCMUTE
Thành phố Hồ Chí Minh, ngày 21 tháng 12 năm 2022 LỜI CẢM ƠN
Chúng em xin cảm ơn cô Tuyết Đan đã tận tâm, hướng dẫn và góp ý cho nhóm
em, để hoàn thiện đồ án này. Cô không chỉ giúp nhóm em mà còn động viên, khích
lệ truyền cảm hứng để nhóm em có thể hoàn thành xuất sắc đồ án này.
Chúng em xin cảm ơn tới bản tổ chức cuộc thi sáng tạo robot “ THẦN
TƯỢNG ĐẠI CHIẾN” , đã hỗ trợ bằng các buổi tập huấn, hướng dẫn cụ thể chi tiết
các quy trình làm robot sao cho hiệu quả nhất.
Thành phố Hồ Chí Minh, 21 tháng 12 năm 2022 TÁC GIẢ TÓM TẮT ĐỀ TÀI
Thuật ngữ robot được sinh ra từ sân khấu, không phải sinh ra ở xưởng sản
xuất. Những robot xuất hiện đầu tiên ở NewYork vào ngày 09/10/1922 trong
vở “Rossum’s Universal Robot” của người soạn kịch người Tiệp Karen Kapek
viết năm 1921. Trong tác phẩm này nhân vật Rossum và con trai của ông đã
tạo ra những chiếc máy gần giống con người để hầu hạ con người. Chiếc
Robot công nghiệp được đưa vào ứng dụng đầu tiên, năm 1961 ở một nhà
máy ô tô của General motor tại trenton, Mỹ. Mục tiêu ứng dụng robot công
nghiệp nhằm góp phần nâng cao nắng suất dây chuyền công nghệ, giảm giá
thành, nâng cao chất lượng và khả năng cạnh tranh của sản phẩm, đồng thời
cải thiện điều kiện lao động. Robot được ứng dụng rộng rãi trong nhiều
nghành công nghiệp. Những ứng dụng ban đầu bao gồm gắp đặt vật liệu, hàn
điểm à phun sơn. Hàn đường thường được thực hiện bằng tay. Tuy nhiên
năng suất thấp do yêu cầu chất lượng bề mặt mối hàng liên quan đến các thao
tác của đầu mỏ hàn với môi trường khắc nghiệt do khói và nhiệt độ phát ra trong quá trình hàn.
Trong đồ án lần này, một mô hình voi điều khiển từ xa có khả năng di chuyển
và gắp gỗ dựa trên bảng điều khiển của sóng RF. Đồ án bao gồm 2 phần: Xây
dựng mô hình voi gắp gỗ và viết chương trình có thể điều khiển mô hình. Mô
hình voi được chế tạo bằng cách tích hợp mạch điều khiển Ardruino với chức
điều khiển tạo sung cho động cơ và cấp nguồn cho RF, tiếp theo là L298N có
chức năng điều khiển động cơ vàng cho phép điều khiển tốc độ và hướng của
bốn động cơ DC cùng một lúc. Mạch hạ áp là mạch chuyển đổi DC 12V sang
5V cho Servo hoạt động. Ngoài ra mạch RF24 để thu sóng tín hiệu điều khiển
và nguồn với 3 cục pin 1850 điện áp 3.7V. Tay điều khiển RF bao gồm các bo
mạch như Arduino UNO R3 lập trình thu phát cho RF, mạch RF24R01 dùng
để điều khiển hướng di chuyển của robot và RF24 để phát sóng tín hiệu điều khiển ABSTRACT
The phrase "robot" originated on stage rather than in a factory. In the 1921
drama "Rossum's Universal Robot" by Czech writer Karen Kapek, robots
made their debut in New York on October 9, 1922. In this endeavor, Rossum
and his son have built machines that are remarkably similar to humans and are
intended to help people. At a General Motors automobile facility in Trenton,
USA, the first industrial robot was put to work in 1961. Application of
industrial robots aims to enhance working conditions, lower costs, increase
product quality and competitiveness, and boost technology line productivity.
Numerous industries make extensive use of robots. Material handling, spot
welding, and spray painting are examples of early applications. Typically,
welding is done by hand. Although the hostile environment created by the
smoke and heat released during the welding process limits the productivity,
the quality standards for the joint surface are related to the functioning of the torch tip.
In this project, an RF control panel is used to remotely operate a model
elephant that can move and pick up wood. Building a wooden elephant model
and creating a program to operate it make up the project’s two main
components. The L298N, which has a gold motor control function that lets the
speed and direction to be regulated, is used to create the elephant model after
the Ardruino control circuit has been integrated with extra control for the
motor and powering the RF. At once, four DC motors are running. For the
servo to function, a DC 12V to 5V converter circuit is used in the low voltage
circuit. The RF24 circuit can also be powered by three 1850 mAh batteries at
a voltage of 3.7V and receive control signals. Boards like the Ardruino UNO
R3 for programming RF transceivers, the RF24R01 circuit for controlling the
direction of robot movement, and the RF24 for broadcasting control signals
are all included in the RF controller. MỤC LỤC
NHIỆM VỤ ĐỀ TÀI.................................................................................................i
TIẾN ĐỘ DỰ ÁN....................................................................................................ii
BẢNG NHẬN XÉT CỦA CỐ VẤN.......................................................................iii
LỜI CẢM ƠN.........................................................................................................iv
TÓM TẮT ĐỀ TÀI..................................................................................................v
ABSTRACT............................................................................................................vi
MỤC LỤC..............................................................................................................vii
DANH MỤC TỪ VIẾT TẮT...............................................................................viii
DANH MỤC BẢNG...............................................................................................ix
DANH MỤC HÌNH.................................................................................................x
CHƯƠNG 1: TỔNG QUAN...................................................................................1
1.1. Đặt vấn đề...........................................................................................................1
1.2. Mục tiêu..............................................................................................................2
1.3. Nội dung nghiên cứu .........................................................................................2
1.4. Giới hạn .............................................................................................................4
1.5. Bố cục.................................................................................................................6
CHƯƠNG 2: XÂY DỰNG PHẦN CỨNG.............................................................7
2.1. Các linh kiện cần thiết........................................................................................7
2.2. Động cơ servo.....................................................................................................8
2.3. Module điều khiển động cơ L298N..................................................................12
2.4. Mạch điều khiển Ardruino R3..........................................................................23
2.5. Sơ đồ nối dây ...................................................................................................28
2.6. Nối dây các mạch với nhau ..............................................................................35
CHƯƠNG 3: VIẾT CHƯƠNG TRÌNH ĐIỀU KHIỂN......................................69
3.1. Giới thiệu phần mềm Arduino IDE...................................................................69
3.2. Chương trình naft RF24L01.............................................................................69
3.3. Chương trình servo...........................................................................................69
CHAPTER 4: HOÀN THIỆN...............................................................................90
4.1. Lắp rắp xe.........................................................................................................90
4.2. Nạp chương trình code cho xe chạy..................................................................91
4.3. Thành quả.........................................................................................................93
CHAPTER 5: KẾT QUẢ, NHẬN XÉT, ĐÁNH GIÁ........................................101
5.1. Kết quả ..........................................................................................................101
5.2. Nhận xét và đánh giá .....................................................................................106
CHAPTER 6: KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN..................................109
6.1. Kết luận..........................................................................................................109
6.2. Hướng phát triển.............................................................................................109
DANH MỤC TỪ VIẾT TẮT DANH MỤC BẢNG DANH MỤC HÌNH CHƯƠNG 1: TỔNG QUAN
1.1. Đặt vấn đề 1.2. Mục tiêu
- Đề tài có những mục tiêu chính sau:
+ Thiết kế sản phẩm hoàn chỉnh gồm xe điều khiển từ xa, có kết nối không dây với
tay điều khiển PS2 hoặc bluetooth.
+ Viết chương trình cho bộ điều khiển PS2 ( hay điều khiển bằng điện thoại thông
qua Bluetoot ), Servo, Ardruino R3 và nạp code vô xe điều khiển.
1.3. Nội dung nghiên cứu - Nội dung 1: + Thu thập dữ liệu
+ Thiết kế tạo hình cho mô hình xe điều khiển từ xa bằng PS2 hoặc Bluetooth. - Nội dung 2:
+ Xây dựng phần cứng và lắp ráp,
+ Nối dây các mạch với nhau.
- Nội dung 3: Viết các chương trình điều khiển cho xe.
- Nội dung 4: Thử nghiệm mô hình xe điều khiển
- Nội dung 5: Hoàn thiện sản phẩm
- Nội dung 6: Đánh giá kết quả thực hiện. 1.4. Giới hạn
- Ardruino, servo dễ cháy
- Hay bị mất tín hiệu khi di chuyển. 1.5. Bố cục
- Chương 1: Tổng quan + Đặt vấn đề.
+ Mục tiêu của đồ án.
+ Nhiệm vụ của đồ án. + Giới hạn.
- Chương 2: Xây dựng phần cứng
+ Giới thiệu các linh kiện cần thiết.
+ Thiết kế khung xe và sơ đồ nối dây.
+ Giới thiệu về động cơ DC, Servo, L298N và Ardruino R3.
- Chương 3: Viết chương trình điều khiển
+ Giới thiệu về phần mềm Ardruino IDE
+ Viết chương trình giao tiếp
- Chương 4: Hoàn thiện
+ Hoàn thiện mô hình xe
+ Nạp code vào xe điều khiển
- Chương 5: Kết luận
+ Những mục tiêu đạt được
+ Hạn chế của đề tài
+ Hướng phát triển đề tài
CHƯƠNG 2: XÂY DỰNG PHẦN CỨNG
2.1. Các linh kiện cần thiết
Figure 1. 2.1 Arduino R3 ( chíp cắm ) Figure 2. 2.1 L298N
Figure 3. 2.1 Servo Figure 4 2.1 Bluetooth
Figure 5. 2.1. Bánh xe và động cơ giảm tốc DC
Figure 6. 2.1. Pin 3.7V và Đế pin
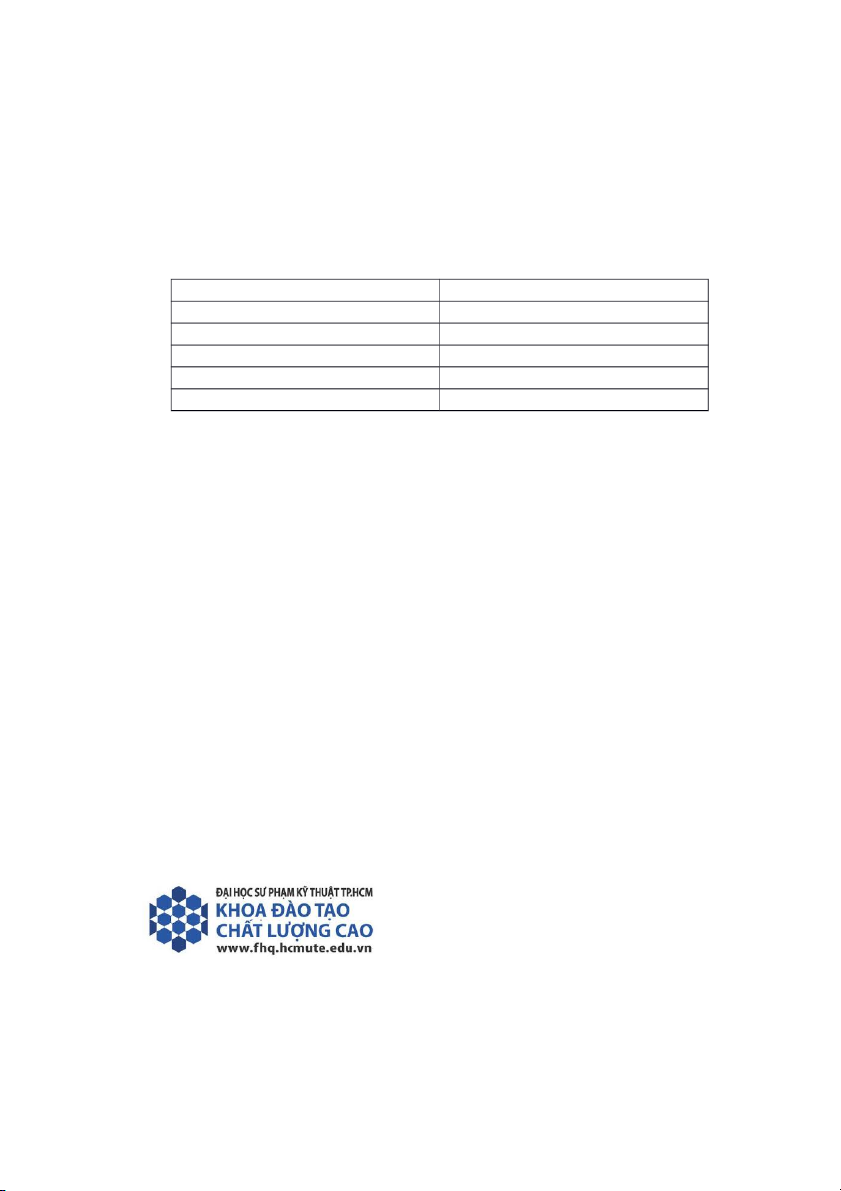
Figure 7. 2.1. Bộ hạ áp Figure 8. 2.1 Tấm fomex
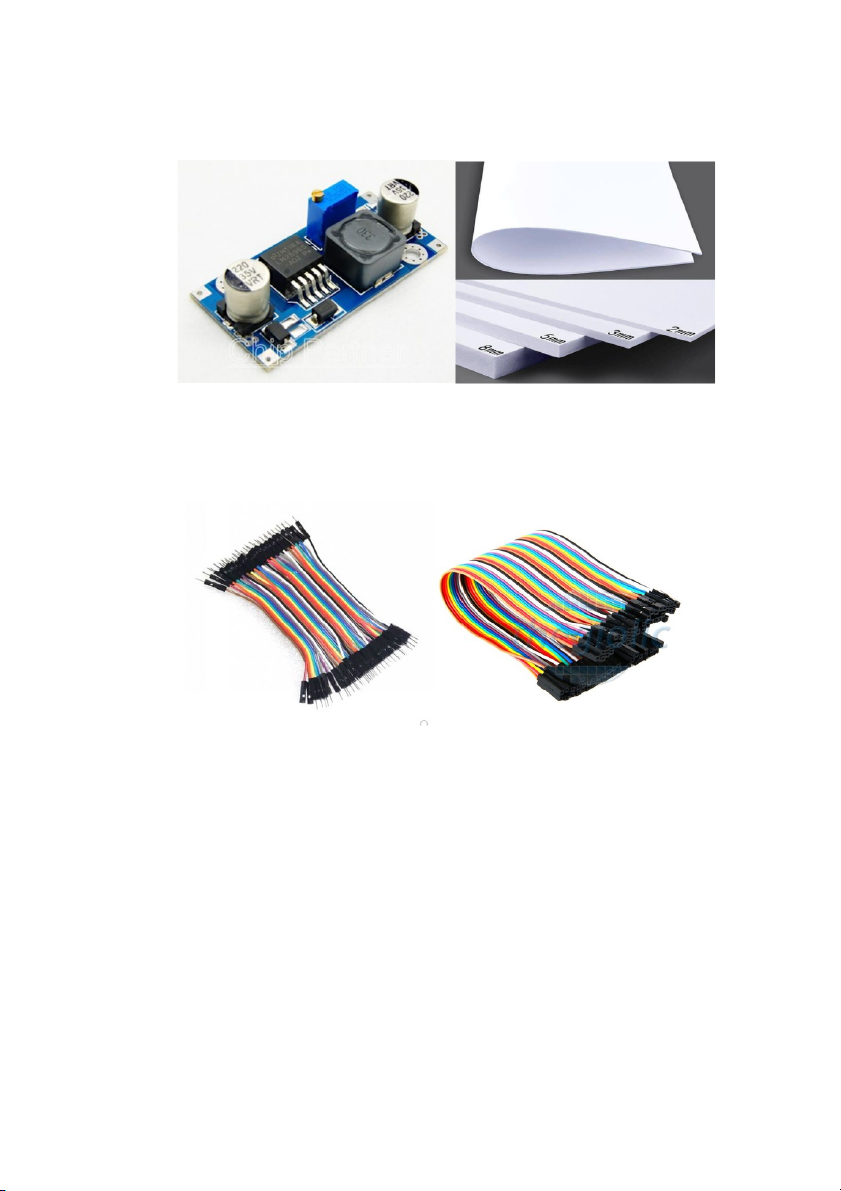
Figure 9. 2.1. Dây đực đực Figure 10. 2.1. Dây cái cái
Figure 11. 2.1. Dây đực cái Figure 12 2.1. Kẹp giữ vật
Figure 13. 2.1. PS2 Figure 14. 2.1. Đế chuyển đổi chân PS2
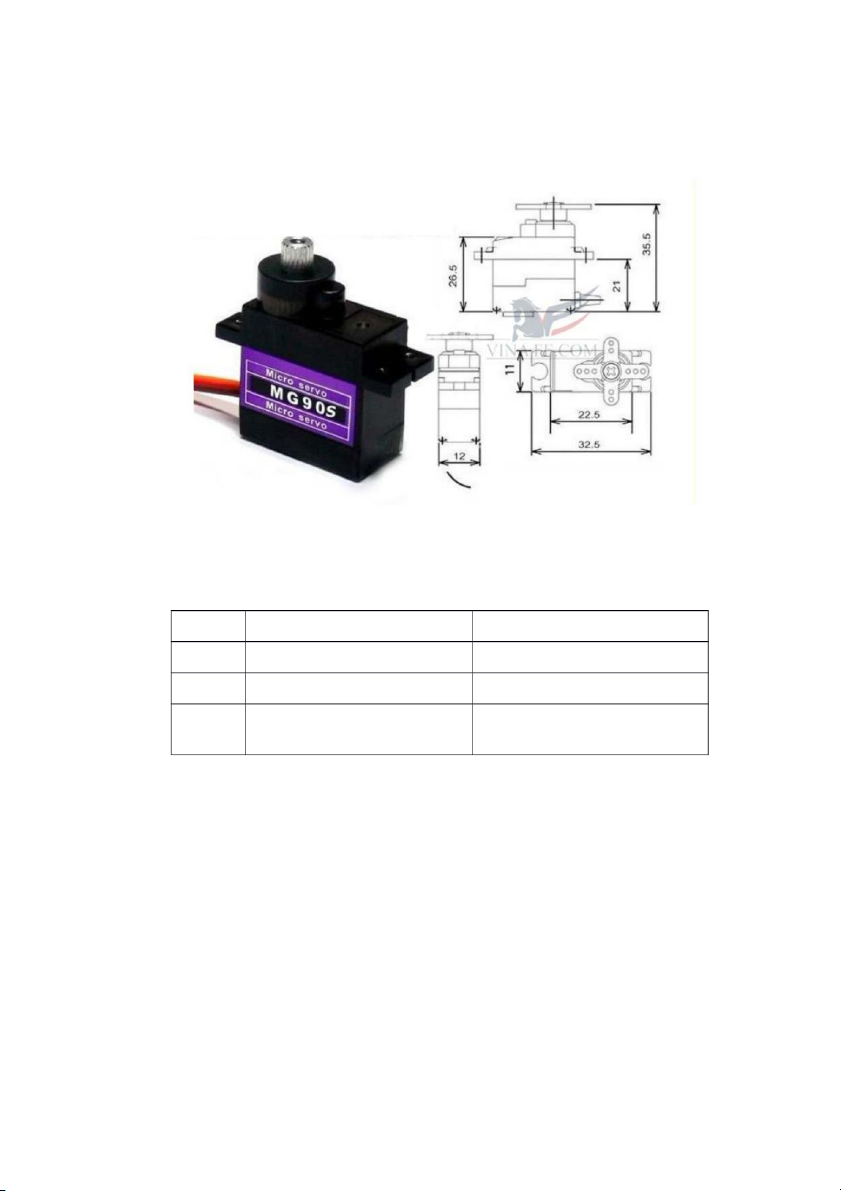
2.2. Động cơ Servo MG90S Figure 1. 2.2. Servo
Table 1. 2.2. Thống số các dây servo Số dây Màu dây Mô tả 1 Màu nâu
Dây nối đất của hệ thống 2 Màu đỏ Dây cấp nguồn 5V
Tín hiệu PWM được đưa vào dây 3 Màu cam
này để điều khiển động cơ
- Các tính năng của Servo MG90S:
+ Điện áp hoạt động: 4.8V ~ 6V DC
+ Tốc độ quay: 0.11 giây/ 60 độ (4.8V), 0.08 giây/60 đô (6V)
+ Mômen xoắn: 1.8kg/cm (4.8V), 2.2kg/cm (6V) + Góc quy: 180° + Bánh răng: kim loại
+ Kích thước: 22.8*12.2*28.5 mm
+ Chiều dài dây điện: 175mm + Trọng lượng: 13.4g
+ Nhiệt độ hoạt động: 0°C ~ 55°C Dây cam: Xung Dây đỏ: Vcc (4.8V ~ 6V) Dây đen: GND / 0V
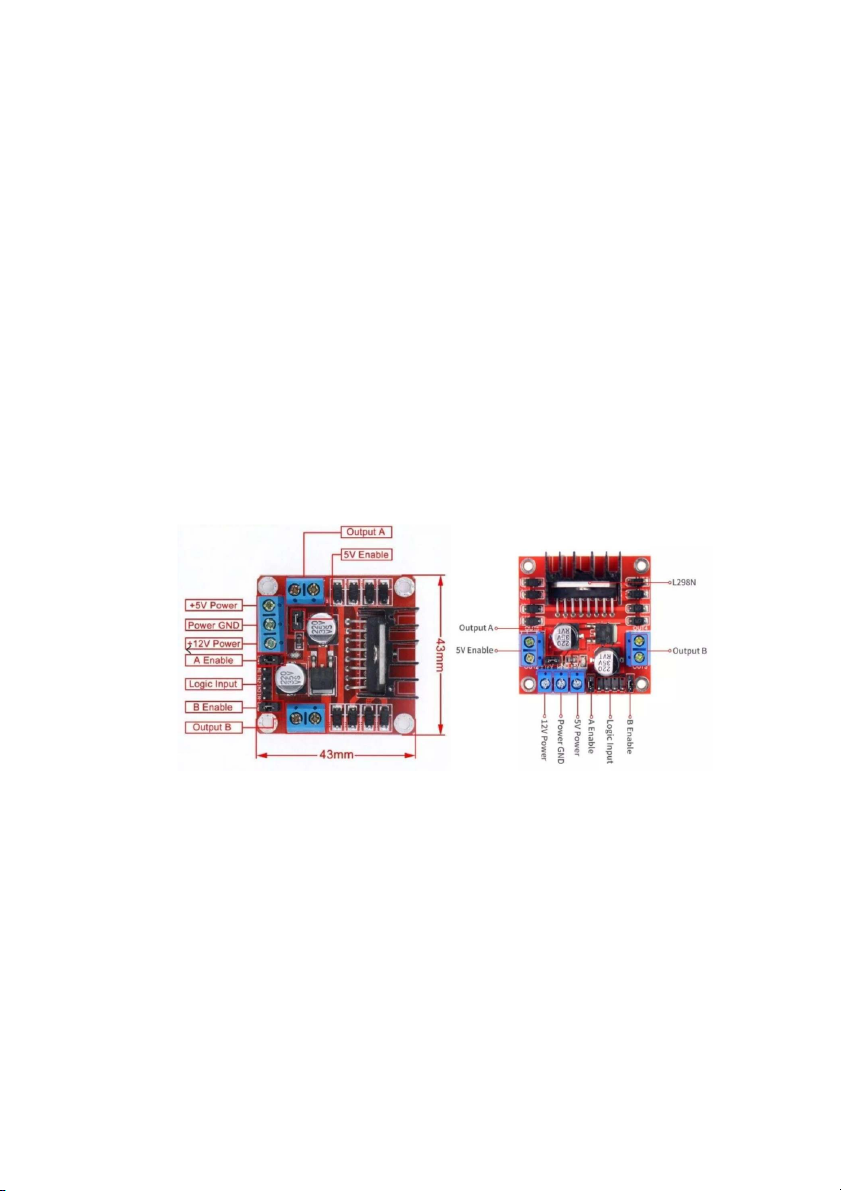
2.3 Module điều khiển L298N Figure 1. 2.3. L298N
Table 2. 2.3. Thông số các chân L298N Tên chân Mô tả IN1 & IN2
Các chân đầu vào điều khiển hướng quay của động cơ A IN3 & IN4
Các chân đầu vào điều khiển hướng quay của động cơ B EN A
Kích hoạt tín hiệu PWM cho động cơ A VIB
Kích hoạt tín hiệu PWM cho động cơ B OUT1 & OUT 2
Chân đầu ra cho động cơ A OUT3 & OUT 4
Chân đầu ra cho động cơ B 12V Đầu vào cấp nguồn 12 5V
Cấp nguồn cho mạch logic bên trong IC L298N GND Chân nối đất
- Các thông số L298N:
+Driver: L298N tích hợp hai mạch cầu H
+Điện áp điều khiển : +5V ~ +12V
+Dòng tối đa cho mỗi cầu H là :2A
+Điện áp của tín hiệu điều khiển : +5 V ~ +7 V
+Dòng của tín hiệu điều khiển : 0 ~ 36Ma
+Công suất hao phí : 20W (khi nhiệt độ T = 75 °C)
+Nhiệt độ bảo quản : -25°C ~ +130
2.4. Mạch điều khiển Arduino R3
Tài liệu liên quan:
-

Mô phỏng thí nghiệm điện tử công suất
16 8 -

Báo cáo thực tập tốt nghiệp Ngành: CNKT- Điện Tử Viễn Thông. Cơ quan thực tập: Công Ty Cổ Phần Viên Mãn | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
701 351 -

Đề cương đồ án tốt nghiệp - Khoa Điện Điện tử | Bộ môn điện tử viễn thông | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
711 356