Hình 2.5. Hình ảnh các loại PLC trong thực tế...................................................16
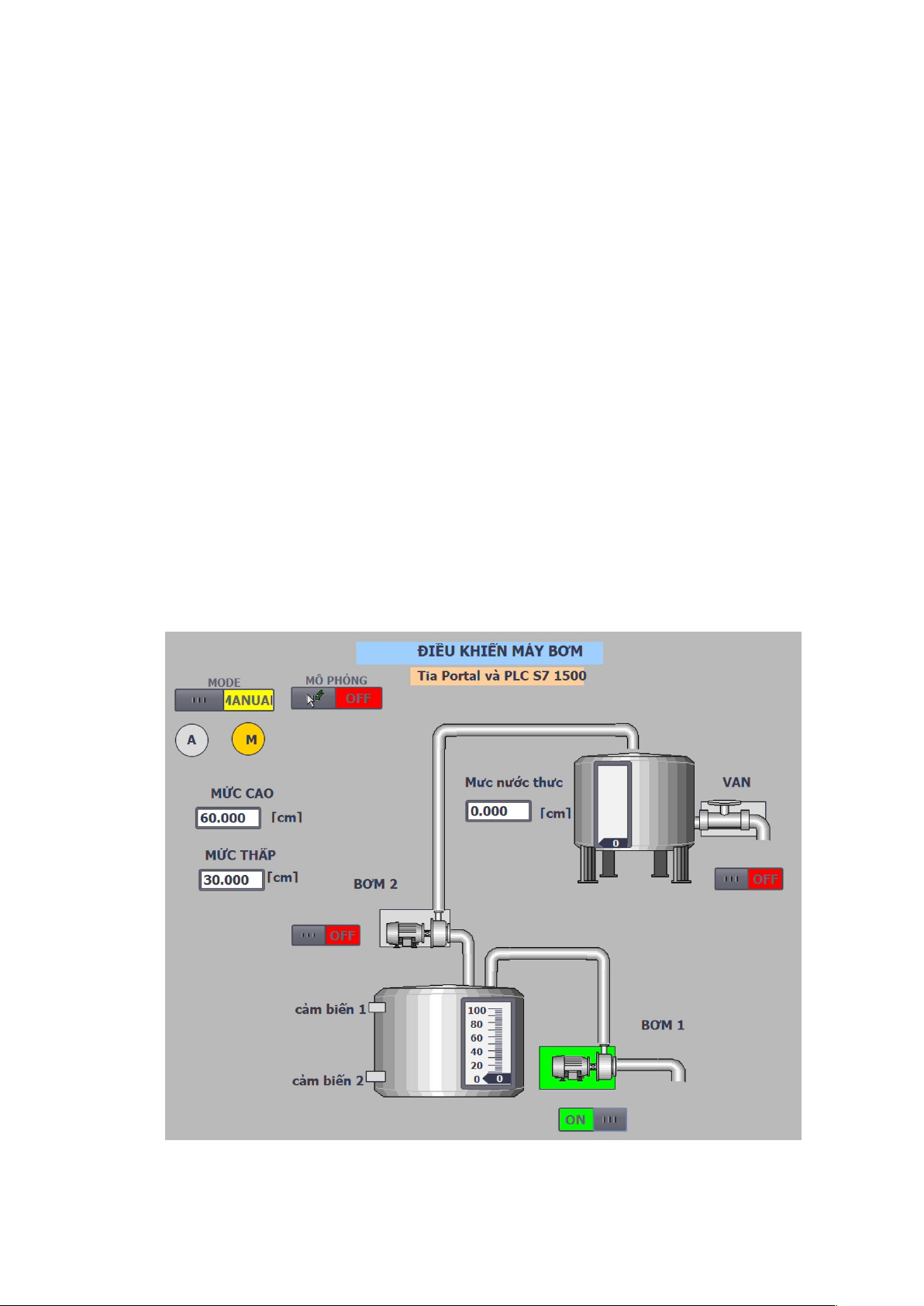
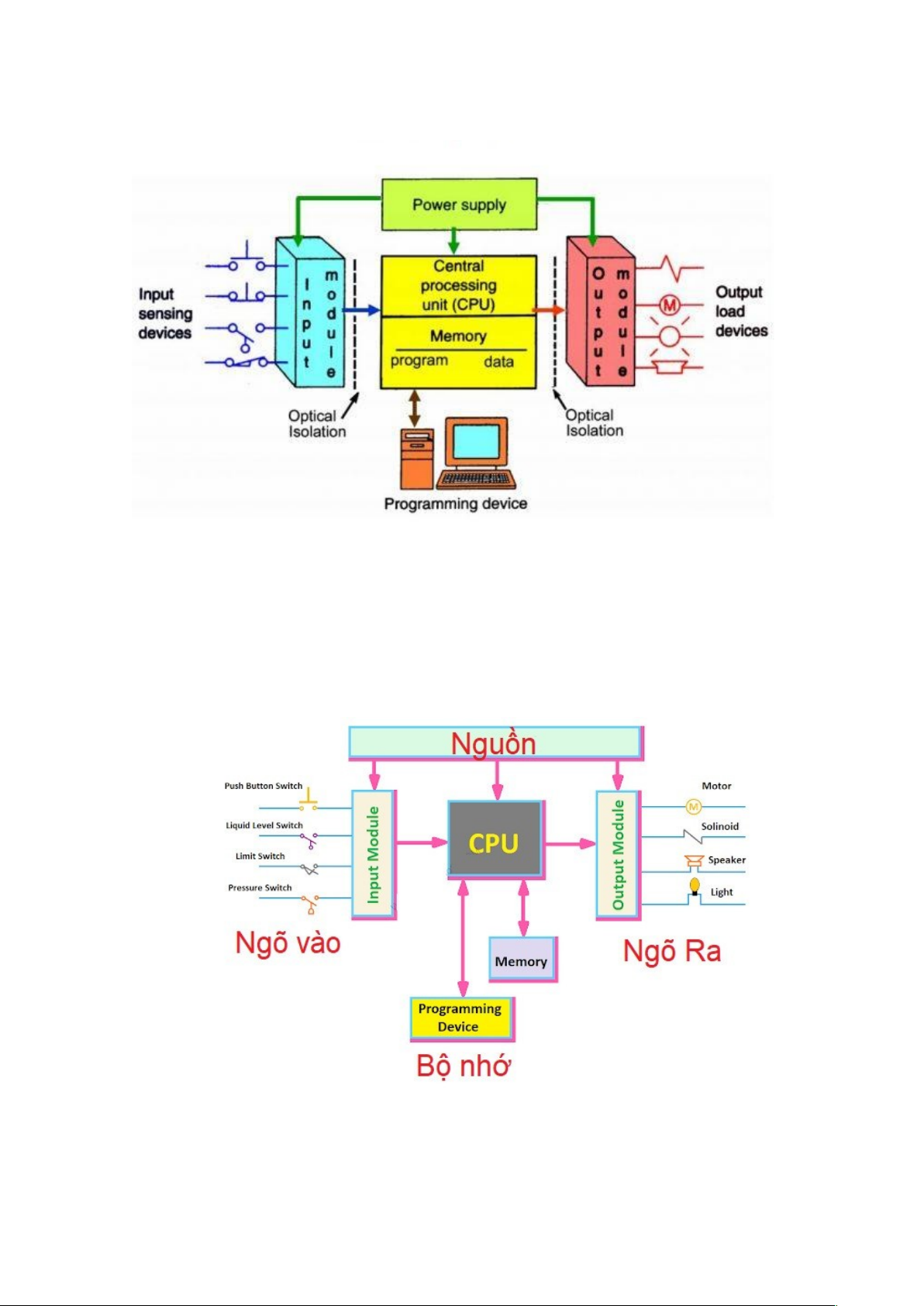
Hình 2.6. Cấu trúc PLC.......................................................................................17
Hình 2.7. Cấu trúc chi tiết PLC...........................................................................17
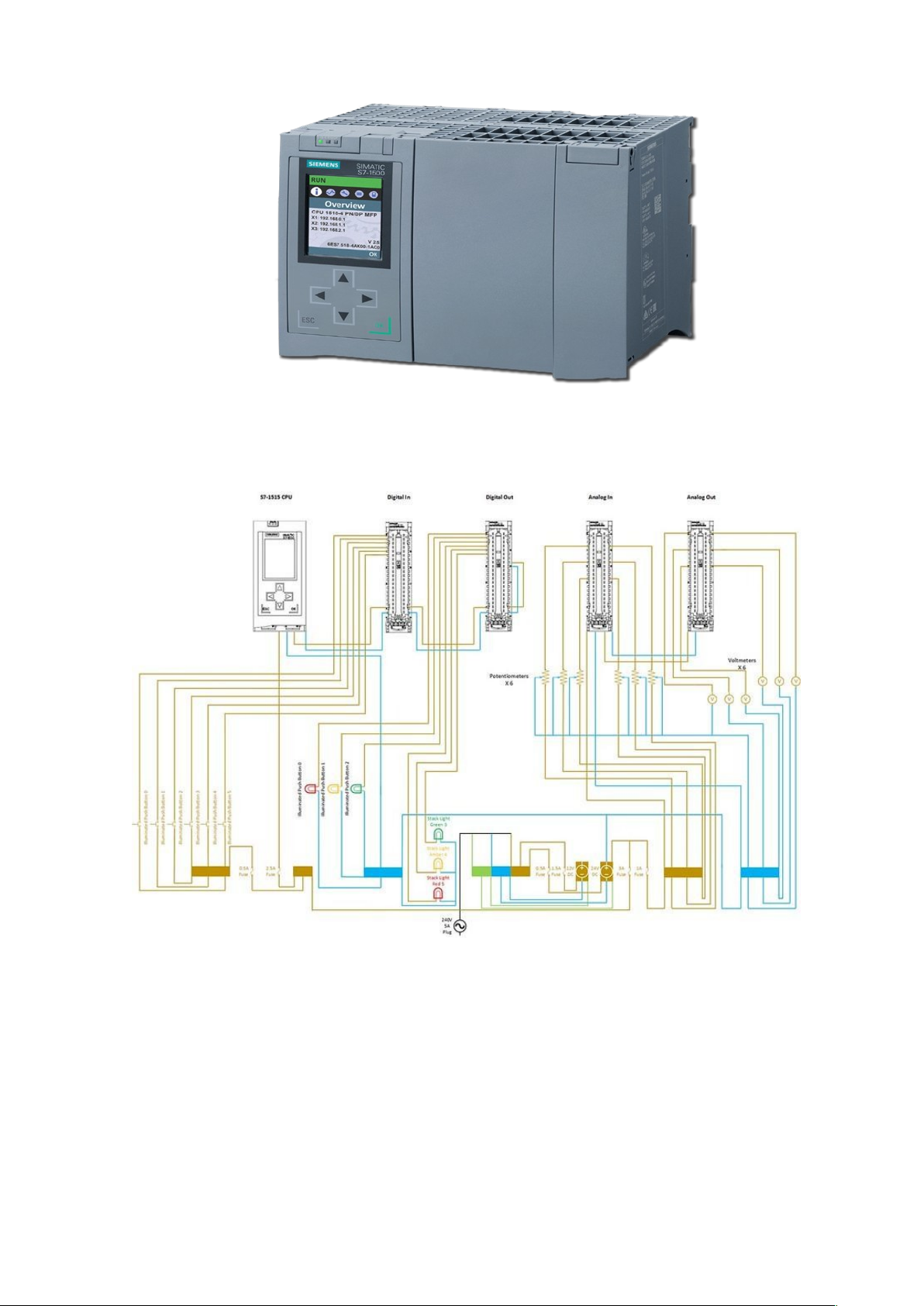
Hình 2.8. PLC S7-1500.......................................................................................19
Hình 2.9. Cấu tạo PLC S7-1500..........................................................................19
Hình 2.10. Giao diện truyền thông của S7-1500.................................................21
Hình 2.11. Các tiếp điểm.....................................................................................22
Hình 2.12. Các khối FBD....................................................................................22
Hình 2.13. Khối tính toán số học và logic...........................................................23
Hình 2.14. Khối chuyển đổi dữ liệu....................................................................24
Hình 2.15. Khối hàm chuẩn hóa giá trị...............................................................25
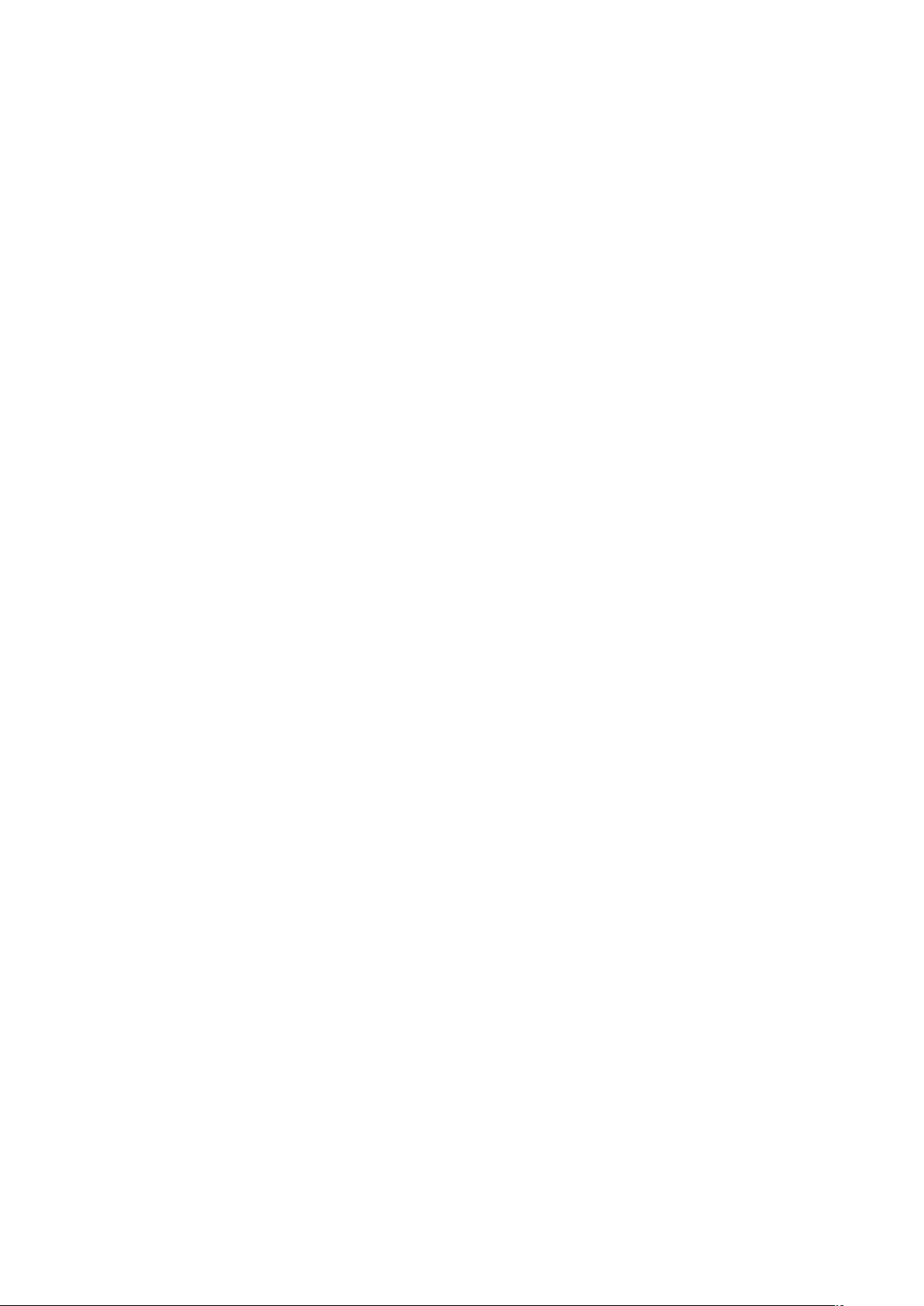
Hình 2.16. Thực tế điều khiển cánh tay robot từ xa thông qua màn hình HMI. .26
Hình 2.17. Phần mềm TIA Portal V16................................................................27
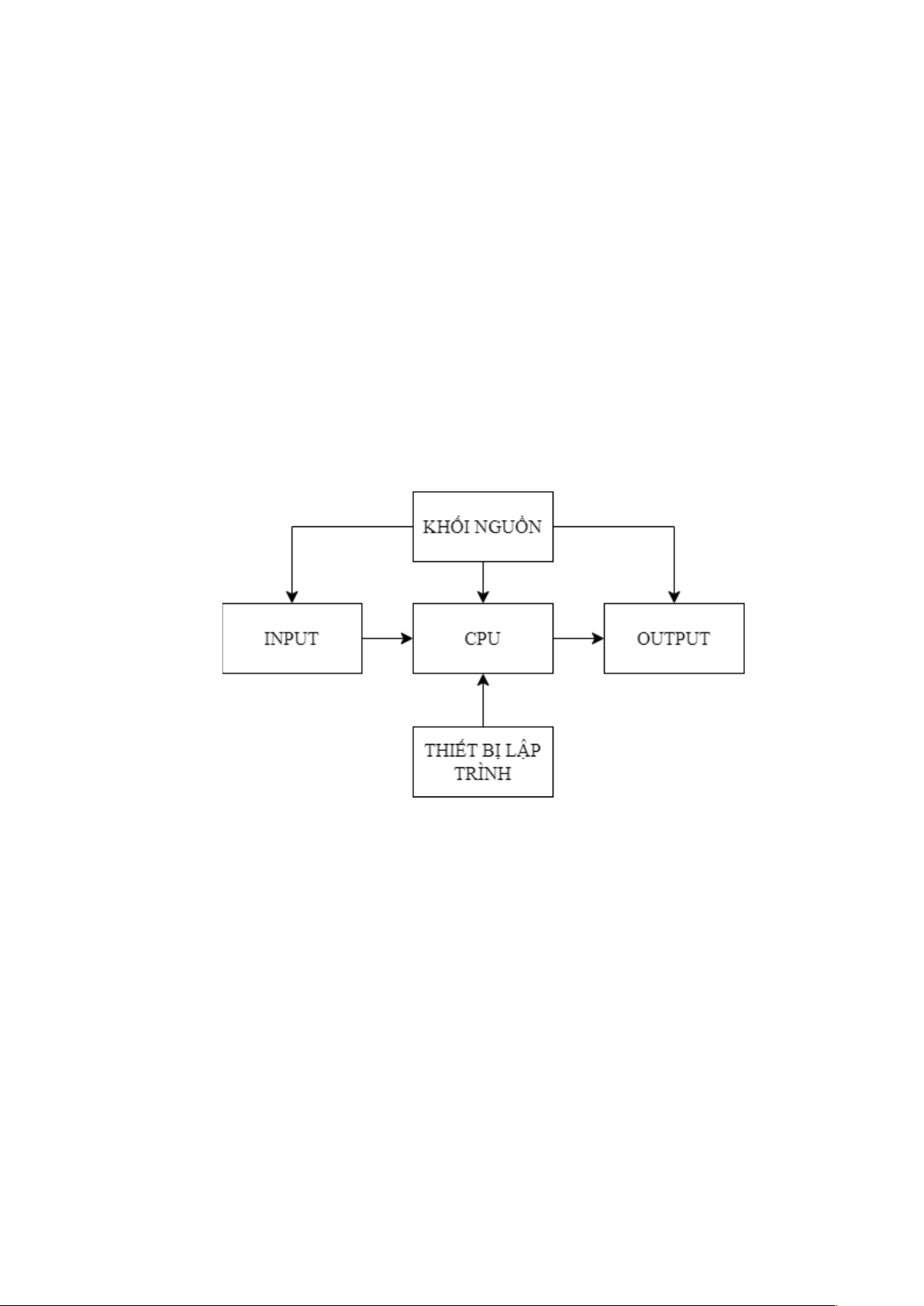
Hình 3.18. Sơ đồ hệ thống...................................................................................29
Hình 3.19. Lưu đồ thuật toán chương trình chính...............................................31
Hình 3.20. Lưu đồ thuật toán chế độ tự động......................................................33
Hình 3.21. Chọn S7-1500 có mã CPU 1515-2 PN 6ES7 515-2AM00-0AB0.....35
Hình 3.22. Khởi tạo HMI....................................................................................35
Hình 3.23. Lựa chọn máy bơm............................................................................36
Hình 3.24. Thiết lập máy bơm 1..........................................................................36
Hình 3.25. Thiết lập máy bơm 2..........................................................................36
Hình 3.26. Lựa chọn mô phỏng bồn chứa nước..................................................37
Hình 3.27. Cài đặt giá trị Min, Max....................................................................37
Hình 3.28. Tạo ô cài đặt giá trị............................................................................37
Hình 3.29. Thiết lập nút MÔ PHỎNG................................................................38
Hình 3.30. Thiết lập MODE................................................................................38
Hình 3.31. Network View...................................................................................38
Hình 3.32. Khai báo các tags PLC......................................................................39
Hình 3.33. Khai báo các tags PLC......................................................................39
Hình 3.34. Khai báo các tags PLC......................................................................40
Hình 3.35. Khai báo các tags HMI......................................................................40
Hình 3.36. Network 1..........................................................................................40
v