Đề thi Kỹ thuật điều khiển (scan) giữa kì 1 năm học 2020-2021 | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội
Đề thi Kỹ thuật điều khiển (scan) giữa kì 1 năm học 2020-2021 | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội. Tài liệu được sưu tầm và biên soạn dưới dạng PDF gồm 01 trang giúp bạn tham khảo, củng cố kiến thức và ôn tập đạt kết quả cao trong kỳ thi sắp tới. Mời bạn đọc đón xem!
Môn: Kỹ thuật điều khiển 12 tài liệu
Trường: Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội 823 tài liệu
Tác giả:
Preview text:
Đại Học Quốc Gia Hà Nội
ĐỀ KIỂM TRA GIỮA KỲ, HK I NĂM 2020
Đại học Công nghệ
Môn: Kỹ thuật điều khiển
Thời gian làm bài: 60 phút (không kể thời gian phát đề)
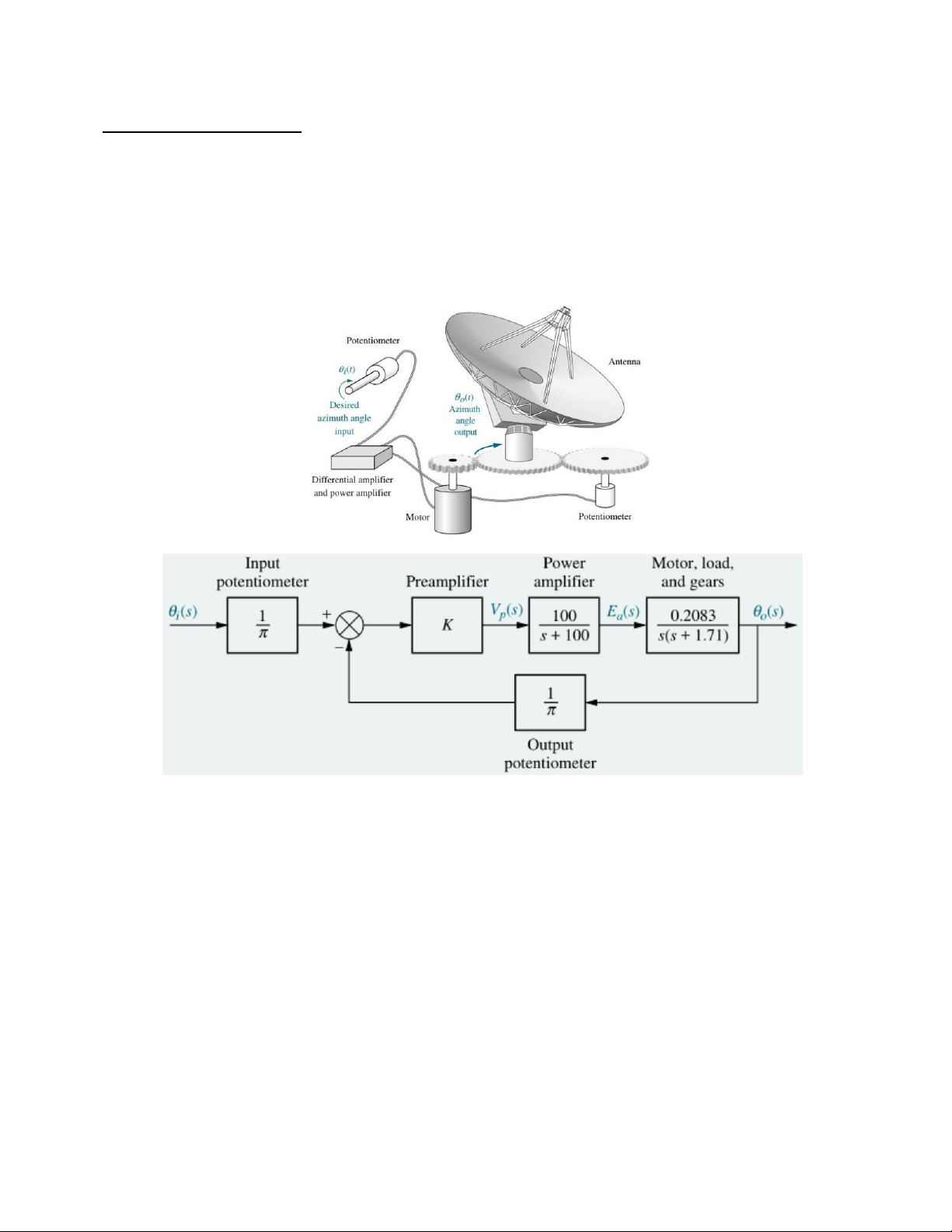
Hệ thống điều khiển góc phương vị của một ăng ten (antenna azimuth position control system)
được mô hình hóa trên hình vẽ dưới đây:
Câu 1: Tìm hàm chuyển (transfer function) của hệ thống vòng hở (forward path).
Câu 2: Tìm biểu diễn trên không gian trạng thái (state space) của hệ thống vòng kín (closed loop)
Câu 3: Nếu ta thay bộ khuếch đại công suất (power amplifier) bằng một hệ thống có hàm chuyển
bằng đơn vị (unity transfer function), tìm K để hệ thống vòng kín có hệ số phần trăm quá mức (percent overshoot) là 10%.
Câu 4: Hệ thống vòng kín là hệ thống loại mấy? Tìm K để đạt sai số ở trạng thái ổn định (steady
state error) là 10%. Khi đó hệ thống có ổn định không?
Tài liệu liên quan:
-

Đề thi Kỹ thuật điều khiển giữa kì 1 năm học 2020-2021 | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội
164 82 -

Đề thi Kỹ thuật điều khiển (CLC) giữa kỳ 2 năm học 2020-2021 | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội
208 104 -

Đề thi Kỹ thuật điều khiển CLC đề số 1,2 giữa kỳ 2 năm học 2021-2022 | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội
203 102 -

Đề thi Kỹ thuật điều khiển kỳ 2 năm học 2021-2022 | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội
607 304