Đồ án Chế tạo xe AGV mini (dò line, điều khiển bluetooth) môn Linux hệ nhúng theo chuẩn kỹ năng ITSS | Trường Đại học Bách Khoa Hà Nội
Đất nước ta đang trong giai đoạn công nghiệp hóa và hiện đại hóa. Để tiến kịp các nước trong khu vực và trên thế giới, nền công nghiệp nước nhà cần tiếp cận các công nghệ và thiết bị hiện đại. Tài liệu được sưu tầm gồm 20 trang, giúp các bạn nắm vững kiến thức, rèn luyện kỹ năng và đạt được kết quả tốt trong học tập. Mời các bạn đón xem!
Môn: Linux hệ nhúng theo chuẩn kỹ năng ITSS 11 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.8 K tài liệu
Tác giả:








Preview text:
TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI
VIỆN CÔNG NGHỆ THÔNG TIN VÀ TRUYỀN THÔNG -- o0o --
ĐỒ ÁN MÔN HỌC HỆ NHÚNG
ĐỀ TÀI: CHẾ TẠO XE AGV MINI (DÒ LINE, ĐIỀU KHIỂN BLUETOOTH)
Giảng viên hướng dẫn:
Nhóm Sinh viên thực hiện: Nhóm
Hà Nội, tháng 082 năm 2023 MỤC LỤC
MỤC LỤC......................................................................................................................................2
LỜI MỞ ĐẦU.................................................................................................................................3
Chương 1: Tổng quan.....................................................................................................................4
1.1. Lý do chọn đề tài.................................................................................................................4
1.2. Mô tả tóm tắt cách thức hoạt động của robot.......................................................................4
Chương 2: Phân tích hệ thống.........................................................................................................5
2.1. Sơ đồ khối của hệ thống.......................................................................................................5
2.2. Vai trò của từng khối............................................................................................................5
Chương 3: Thiết kế hệ thống...........................................................................................................6
3.1. Sơ đồ mạch chi tiết của hệ thống.........................................................................................6
3.2. Chức năng chi tiết của từng khối.........................................................................................6
3.2.1. Khối nguồn...................................................................................................................6
3.2.2. Khối điều khiển............................................................................................................7
3.2.3. Sensor dò line...............................................................................................................7
3.2.4. Sensor đo khoảng cách.................................................................................................7
3.3. Triển khai xây dựng hệ thống..............................................................................................8
Chương 4: Kết quả và kết luận........................................................................................................9
4.1. Kết quả.................................................................................................................................9
4.2. Kết luận...............................................................................................................................9
Chương 5: Tài liệu tham khảo.......................................................................................................10 LỜI MỞ ĐẦU
Hiện nay, các vi xử lý hay vi điều khiển đang được sử dụng rộng rãi trong nhiều lĩnh vực
như: điều khiển, tự động hóa, đo đạc. truyền thông,… Cùng với sự tiến bộ của khoa học công
nghệ, các ứng dụng tự động hóa càng phát triển nhầm nâng cao năng suất lao động. Ngày càng
nhiều robot thông minh được chế tạo và nghiên cứu để nâng cao chất lượng cuộc sống con người
như các xe không người lái phục vụ du lịch, tham quan, các robot trong các dây chuyền sản xuất tự động,…
Chính vì điều đó, nhóm chúng em đã tiến hành đề tài “Chế tạo xe AGV mini (dò line, tránh
vật cản)” với mong muốn có thể vận dụng những kiến thức đã học để bước đầu nắm bắt và xây dựng robot thông minh.
Trong quá trình thức hiện đề tài, vẫn còn tồn tại nhiều thiếu sót, chúng em rất mong nhận
được những nhận xét và ý kiến từ thầy và các bạn để đê tài được hoàn thiện hơn. Xin chân thành cảm ơn.
Chương 1: Tổng quan
1.1. Lý do chọn đề tài
Đất nước ta đang trong giai đoạn công nghiệp hóa và hiện đại hóa. Để tiến kịp các
nước trong khu vực và trên thế giới, nền công nghiệp nước nhà cần tiếp cận các công nghệ
và thiết bị hiện đại. Các cán bộ kĩ thuật cần được trang bị các kiến thức mới, như vậy mới
có thể đẩy nhanh các quá trình phát triển của đất nước.
Kĩ thuật robot đã và đang được ứng dụng rộng rãi trong nhiều lĩnh vực ở nhiều nước,
nó đã đem lại hiệu quả to lớn trong sản xuất công nghiệp, trong quốc phòng, y tế, xã hội,
thám hiểm vũ trụ. Tuy nhiên, tình hình sử dụng robot trong sản xuất của chúng ta còn
hiếm hoi. Việc ứng dụng robot công nghiệp hiện vẫn còn là lĩnh vực mới mẻ đối với nền
công nghiệp nước nhà. Trong xu hướng phát triển chung việc nghiên cứu và sử dụng robot
ở Việt nam chắc chắn sẽ phát triển.
AGV là một loại robot được sử dụng tại nước ngoài trong các ngành công nghiệp
dùng để chuyên chở tự động. Tuy nhiên đối với Việt Nam thì công nghệ này vẫn chưa
được áp dụng nhiều, thấy được tình hình đó, nhóm chúng em quyết định xây dựng một xe
robot AGV mini (dò line, tránh vật cản).
1.2. Mô tả tóm tắt cách thức hoạt động của robot
Xe robot hoạt động trên đường line được định sẵn, 3 mắt dò line sẽ xác định hướng
di chuyển của xe, khi gặp chướng ngại vật, cảm biến khoảng cách sẽ đo khoảng cách từ
robot đến vật để tiến hành di chuyển tránh chướng ngại vật, ở cuối đường line ta sẽ kẻ một
đường ngang đen nhằm cho robot xác định đó là điểm cuối của line và sau đó robot sẽ dừng lại.
Chương 2: Giới thiệu arduino và các thành phần mạch 2.1. Giới thiệu về arduino
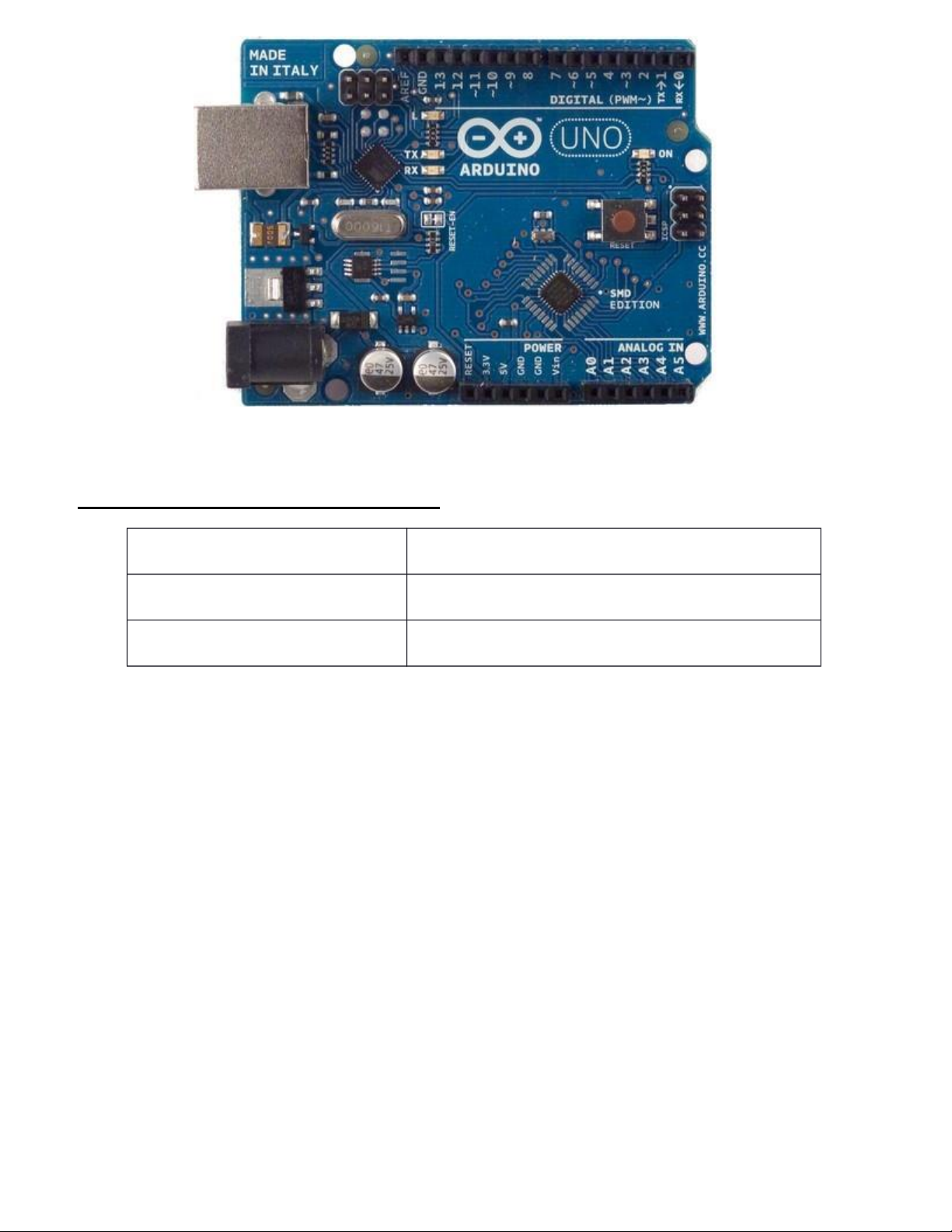
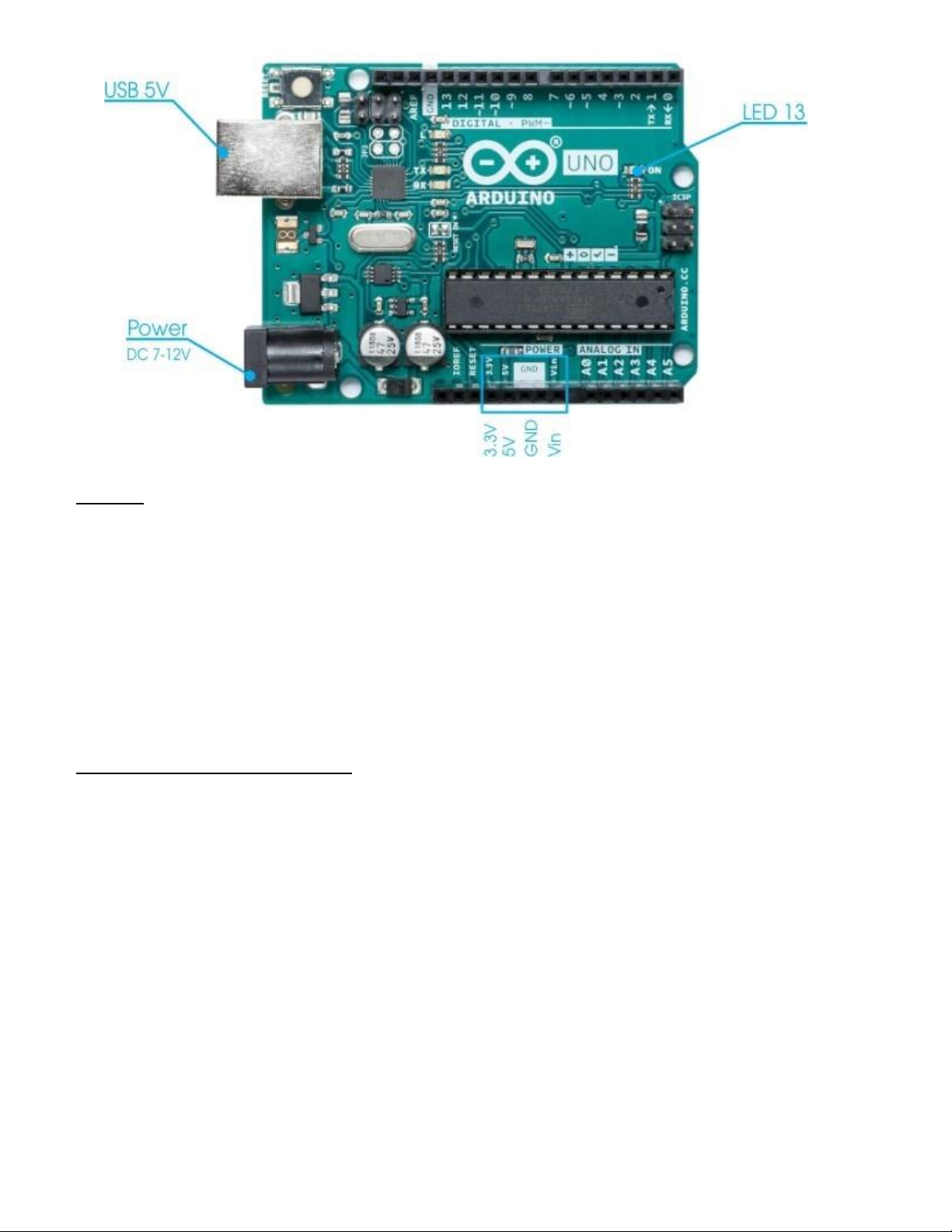
2.1.1. Sơ lược về Arduino UNO R3
Arduino Uno là một bảng mạch vi điều khiển nguồn mở dựa trên vi điều khiển
Microchip ATmega328 được phát triển bởi Arduino.cc. Bảng mạch được trang bị các bộ
chân đầu vào/ đầu ra Digital và Analog có thể giao tiếp với các bảng mạch mở rộng khác nhau.
Hình 1: Sơ đồ cấu trúc Arduino Uno R3
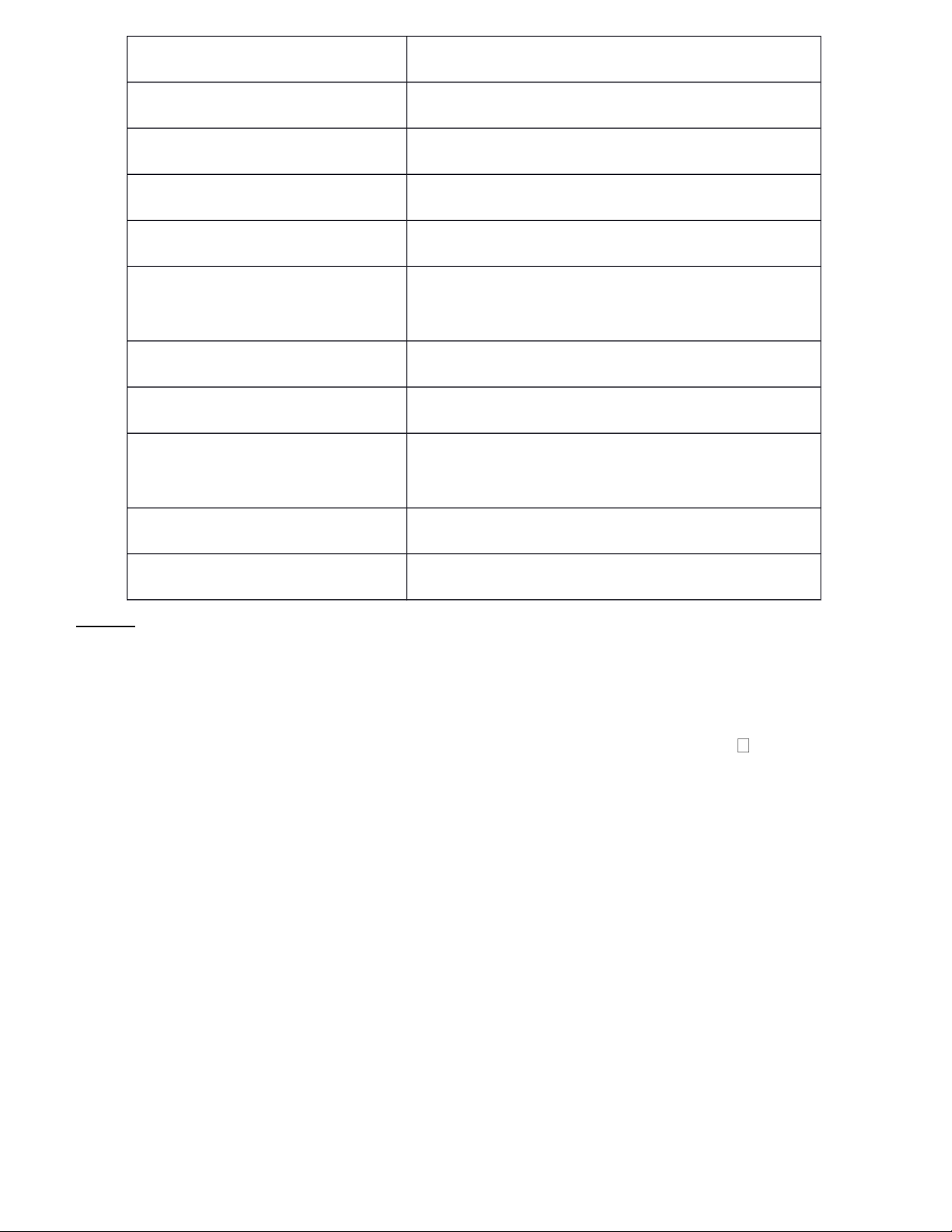
2.1.2. Một vài thông số
Một vài thông số của Arduino UNO R3 Vi điều khiển ATmega328 họ 8bit Điện áp hoạt động
5 V DC (chỉ được cấp qua cổng USB ) Tần số hoạt động 16 MHz Dòng tiêu thụ khoảng 30mA
Điện áp vào khuyên dùng 7-12 V DC Điện áp vào giới hạn 6- V 20 DC Số chân Digital I/O 14 (6 chân hardware PWM ) Số chân Analog 6 (độ phân giải 10bit )
Dòng tối đa trên mỗi chân 30 mA I/O Dòng ra tối đa (5V) 500 mA Dòng ra tối đa (3.3V) 50 mA
32 KB (ATmega328) với 0.5KB dùng bởi Bộ nhớ flash bootloader SRAM 2 KB (ATmega 328) EEPROM 1 KB (ATmega 328) Power
• LED: Có 1 LED được tích hợp trên bảng mạch và được nối vào chân D13. Khi
chân có giá trị mức cao (HIGH) thì LED sẽ sáng và LED tắt khi ở mức thấp (LOW).
• VIN: Chân này dùng để cấp nguồn ngoài (điện áp cấp từ 7-12VDC). 5V: Điện
áp ra 5V (dòng điện trên mỗi chân này tối đa là 500mA).
• 3V3: Điện áp ra 3.3V (dòng điện trên mỗi chân này tối đa là 50mA).
• GND: Là chân mang điện cực âm trên board.
• IOREF: Điệp áp hoạt động của vi điều khiển trên Arduino UNO và có thể đọc
điện áp trên chân IOREF. Chân IOREF không dùng để làm chân cấp nguồn. Bộ nhớ Vi điều khiển ATmega328:
• 32 KB bộ nhớ Plash: trong đó bootloader chiếm 0.5KB.
• 2 KB cho SRAM: (Static Random Access Menory): giá trị các biến khai báo sẽ
được lưu ở đây. Khai báo càng nhiều biến thì càng tốn nhiều bộ nhớ RAM. Khi mất
nguồn dữ liệu trên SRAM sẽ bị mất.
• 1 KB cho EEPROM: (Electrically Eraseble Programmable Read Only Memory):
Là nơi có thể đọc và ghi dữ liệu vào đây và không bị mất dữ liệu khi mất nguồn.
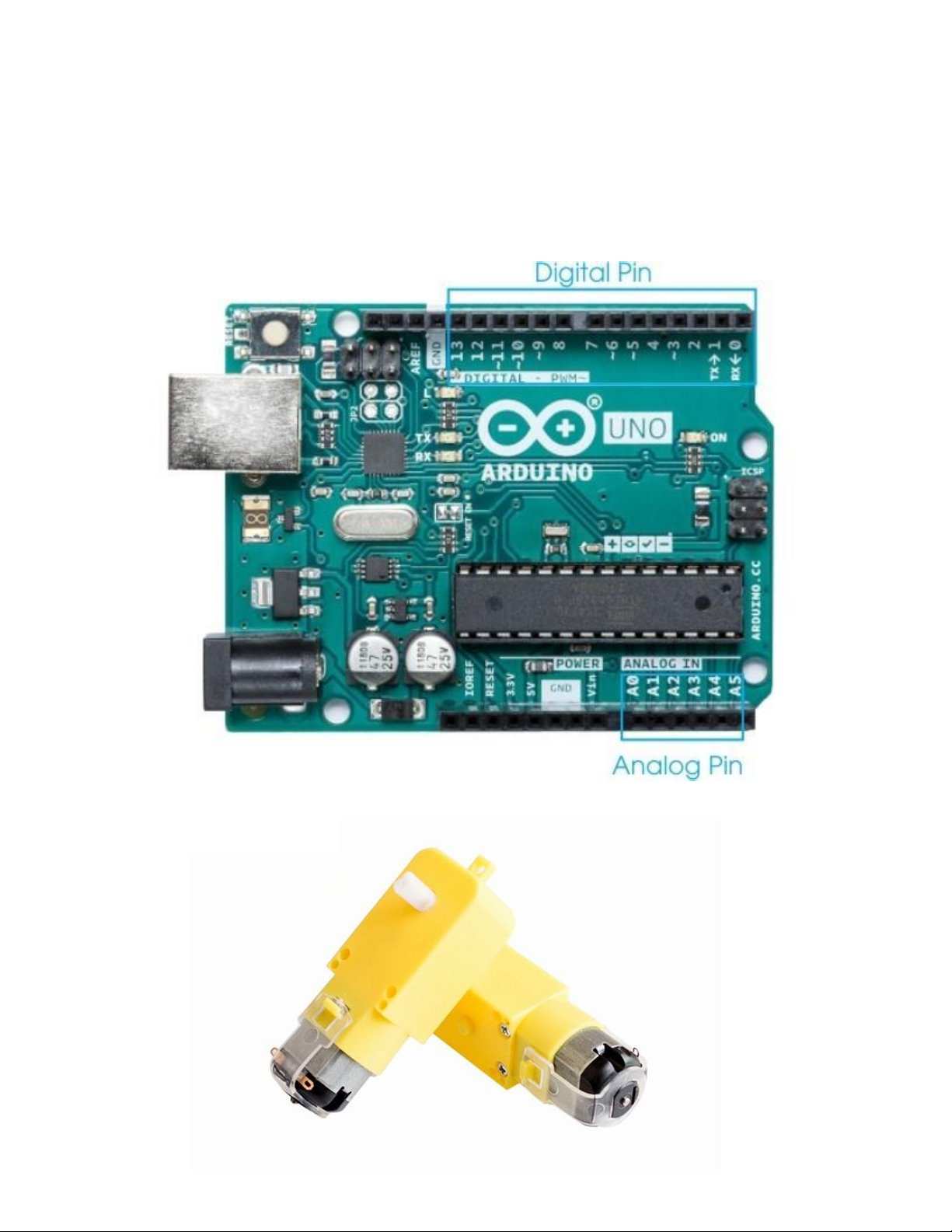
Các chân đầu vào và đầu ra
Trên Board Arduino Uno có 14 chân Digital được sử dụng để làm chân đầu vào và đầu
ra và chúng sử dụng các hàm pinMode(), digitalWrite(), digitalRead(). Giá trị điện áp trên
mỗi chân là 5V, dòng trên mỗi chân là 20mA và bên trong có điện trở kéo lên là 20-50
ohm. Dòng tối đa trên mỗi chân I/O không vượt quá 40mA để tránh trường hợp gây hỏng board mạch.
Ngoài ra, một số chân Digital có chức năng đặt biệt:
• Serial: 0 (RX) và 1 (TX): Được sử dụng để nhận dữ liệu (RX) và truyền dữ liệu (TX) TTL.
• Ngắt ngoài: Chân 2 và 3.
• PWM: 3, 5, 6, 9 và 11 Cung cấp đầu ra xung PWM với độ phân giải 8 bit bằng hàm analogWrite ().
• SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Các chân này hỗ trợ giao tiếp SPI bằng thư viện SPI.
• LED: Có 1 LED được tích hợp trên bảng mạch và được nối vào chân D13. Khi
chân có giá trị mức cao (HIGH) thì LED sẽ sáng và LED tắt khi ở mức thấp (LOW).
• TWI/I2C: A4 (SDA) và A5 (SCL) hỗ trợ giao tiếp I2C/TWI với các thiết bị khác.
Arduino Uno R3 có 6 chân Analog từ A0 đến A5, đầu vào cung cấp độ phân giải là 10 bit.
2.2. Các thành phần của mạch 2.2.1. Động cơ giảm tốc
Hình 3: Hình ảnh về động cơ giảm tốc Thông số kỹ thuật:
• Điện áp hoạt động: 3V~9V DC
• Momen xoắc cực đại: 800gf cm, min 1:48 (3V)
• Tốc độ không tải: 125 vòng/1 phút (3V)
• Dòng không tải: 70mA (250mA MAX)
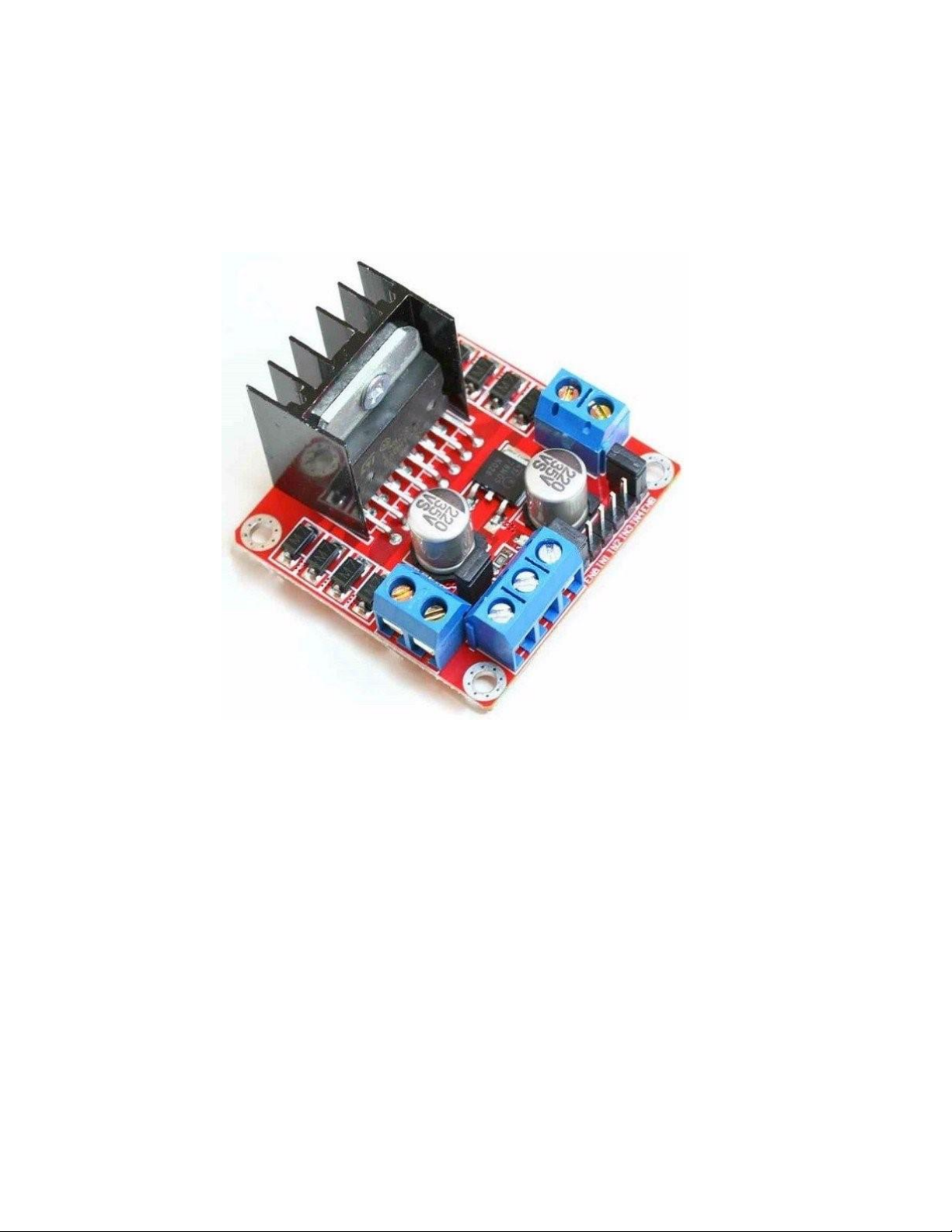
2.2.2. Module điều khiển động cơ L298
Hình 4: Hình ảnh về Module điều khiển động cơ L298 Thông số kỹ thuật:
• Module L298 có thể điều khiển 2 động cơ DC hoặc 1 động cơ bước, có 4 lỗ nằm
ở 4 góc thuận tiện cho người sử dụng vị trí cố định cua module.
• Có gắn tản nhiệt chống nóng cho IC, giúp IC có thể điều khiển dòng đỉnh đạt 2A.
• IC L298N được gắn với các diode trên board giúp bảo vệ vi xử lý chống lại các
dòng điện cảm ứng từ việc khởi động/ tắt động cơ.
• Driver: L298N tích hợp hai mạch cầu H
• Điện áp điều khiển: +5V ~ +12V
• Dòng tối đa cho mỗi mạch cầu H: 2A
• Điện áp của tín hiệu điều khiển: 0~ 36mA
• Công suất hao phí: 20W (khi nhiệt độ T=75°C)
• Nhiệt độ bảo quản: -25°C~ +130
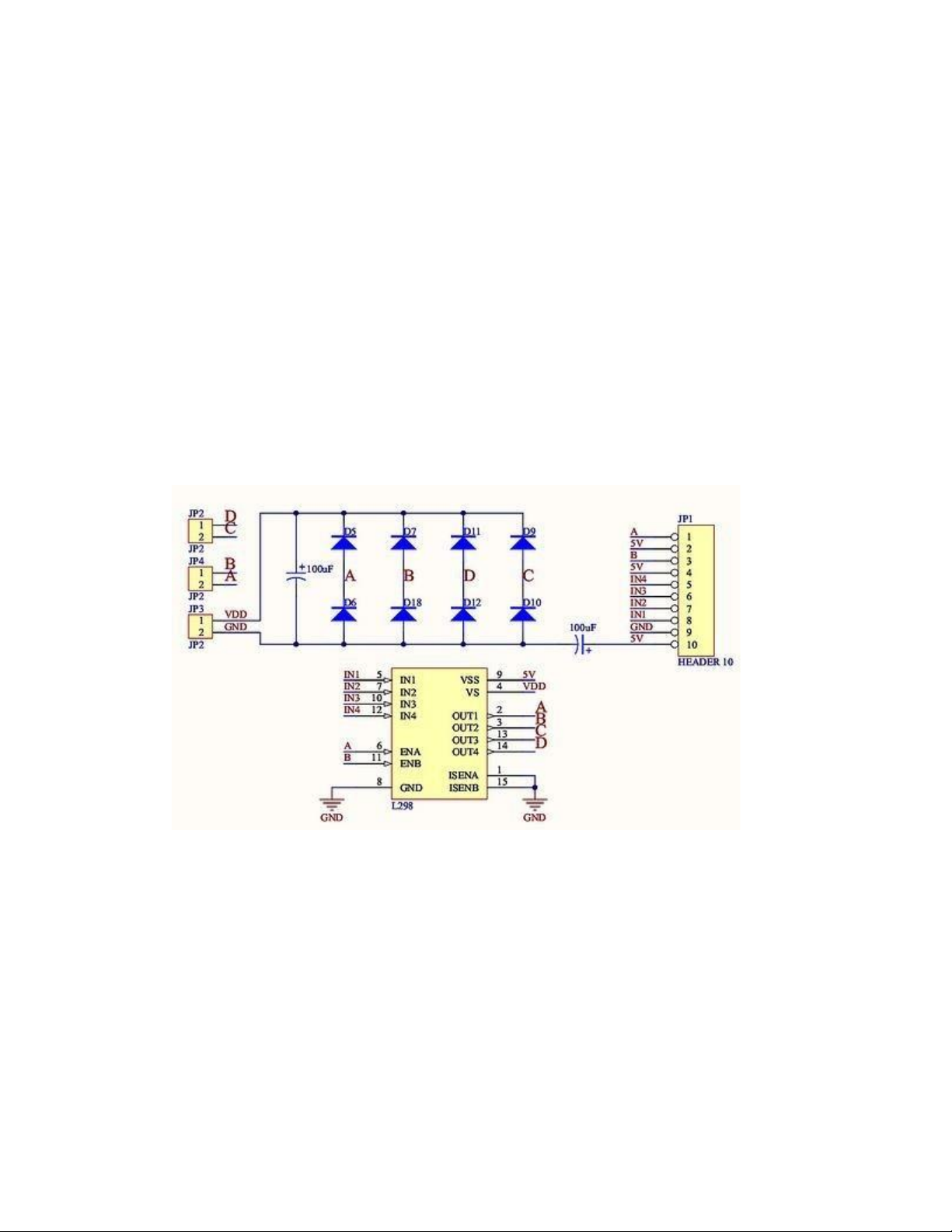
Công dụng: IC L298 là một IC tích hợp nguyên khối gồm 2 mạch cầu H bên trong.
Với điện áp làm tăng công suất nhỏ như động cơ DC loại vừa…
• 4 chân INPUT: IN1, IN2, IN3, IN4 được nối lần lượt với các chân 5,7,10,12 của
L298. Đây là các chân nhận tín hiệu điều khiển.
• 4 chân OUTPUT: OUT1, OUT2, OUT3, OUT4 (tương tự với các chân input)
• được nối với các chân 2,3,13,14 của L298. Các chân này sẽ được nối với động cơ.
• Hai chân ENA và ENB dùng để điều khiển mạch cầu H trong L298. Nếu ở mức
logic “1” (nối với nguồn 5V) cho phép mạch cầu H hoạt động, nếu ở mức logic
“0” thì mạch cầu H không hoạt động.
• INT1 = 1; INT2 = 0: Động cơ quay thuận. INT1 = 0; INT2 = 1: Động cơ quay
nghịch. INT1 = INT2: Động cơ dùng ngay tức thì. Với ENB cũng tương tự với INT3, INT4.
Hình 5: Sơ đồ nguyên lý
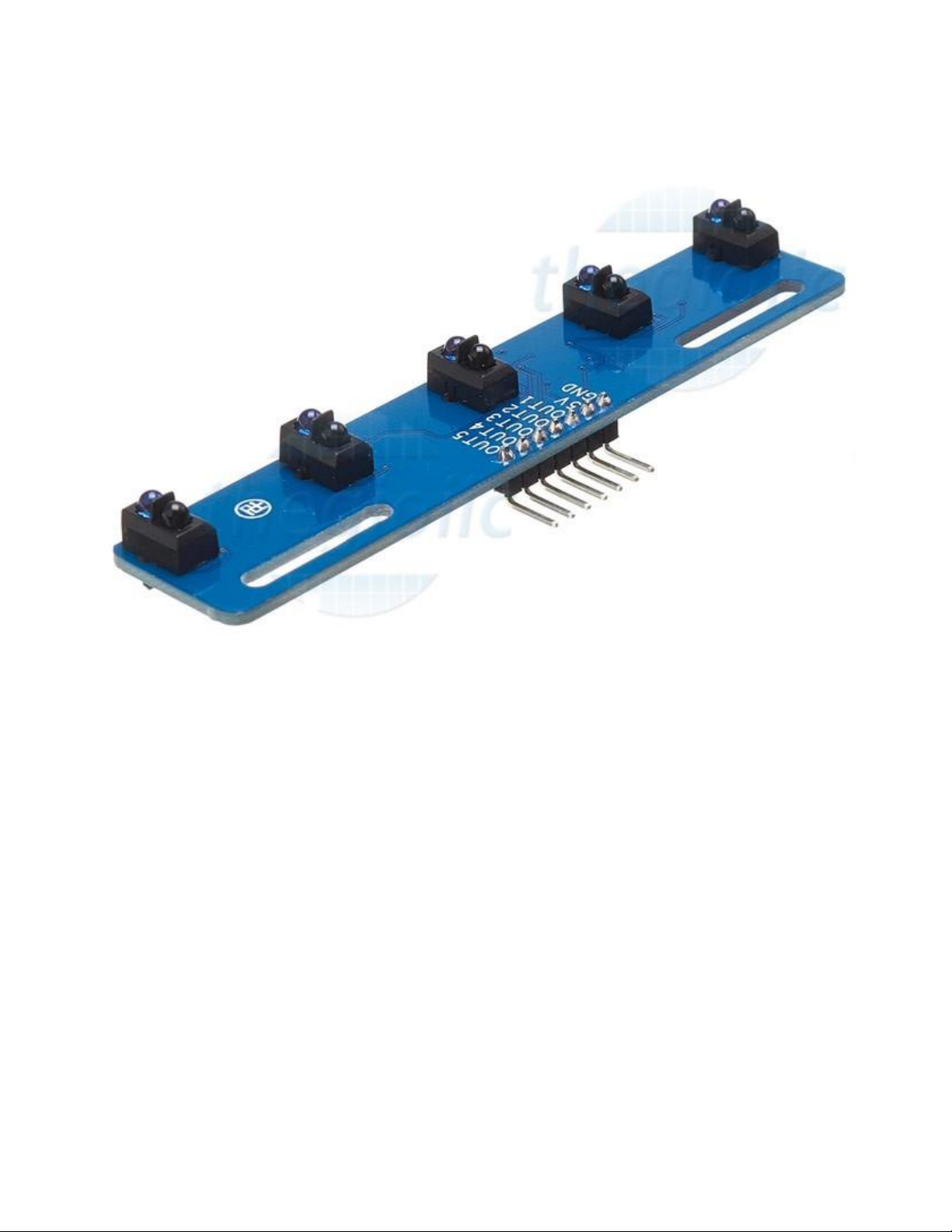
2.2.3. Cảm biến hồng ngoại 5 kênh TCRT 5000
Hình 5: Hình ảnh về Cảm Biến Dò Line Đơn TCRT5000 Thông số kỹ thuật:
• Điện áp hoạt động: 5VDC
• Mạch sử dụng chip so sánh LM393
• Dòng tiêu thụ: <10mA
• Dải nhiệt độ hoạt động: 0oC ~ 50oC
• Đầu giao tiếp: 4 dây VCC, GND, DO, AO
• Tín hiệu kích hoạt đầu vào: TTL
• Kích thước: 3.2 x 1.4mm
Công dụng: hoạt động theo nguyên lý thu – phát ánh sáng. Các mắt sẽ phát ra tia
hồng ngoại có bước sóng hồng ngoại. Mắt thu ở bề mặt chứa vùng sáng sẽ hấp thụ ánh
sáng hồng ngoại đó. Ở trạng thái bình thường mắt thu có nội trở rất lớn (hàng trăm Kilo-
Ohm). Khi thu nhận tia hồng ngoại vào nội trở của mắt thu giảm (vài chục KiloOhm). Nếu
bề mặt phản xạ lại ánh sáng, tín hiệu đó sẽ được mắt thu thu nhận → Từ đó ta xác định
được tín hiệu và đưa ra vùng sáng xác định (Những bề mặt, vùng phản xạ gần như phản xạ
hết những ánh sáng đi qua nó). Nếu bề mặt không phản xạ lại ánh sáng, không có tín hiệu
về mắt thu → Từ đó ta không nhận được tín hiệu và xác định được vùng tối (Những bề
mặt, vùng tối hấp thụ gần như hết ánh sáng đi qua nó). 2.2.5. Pin 18650
Hình 5: Hình ảnh về pin 18650 Thông số kỹ thuật:
• Điện áp: 3.6V đến 4.2V • Chiều dài 650mm
• Dung lượng từ 3000mAh
• Có thể sạc lại được • Dòng xả 15, 20A
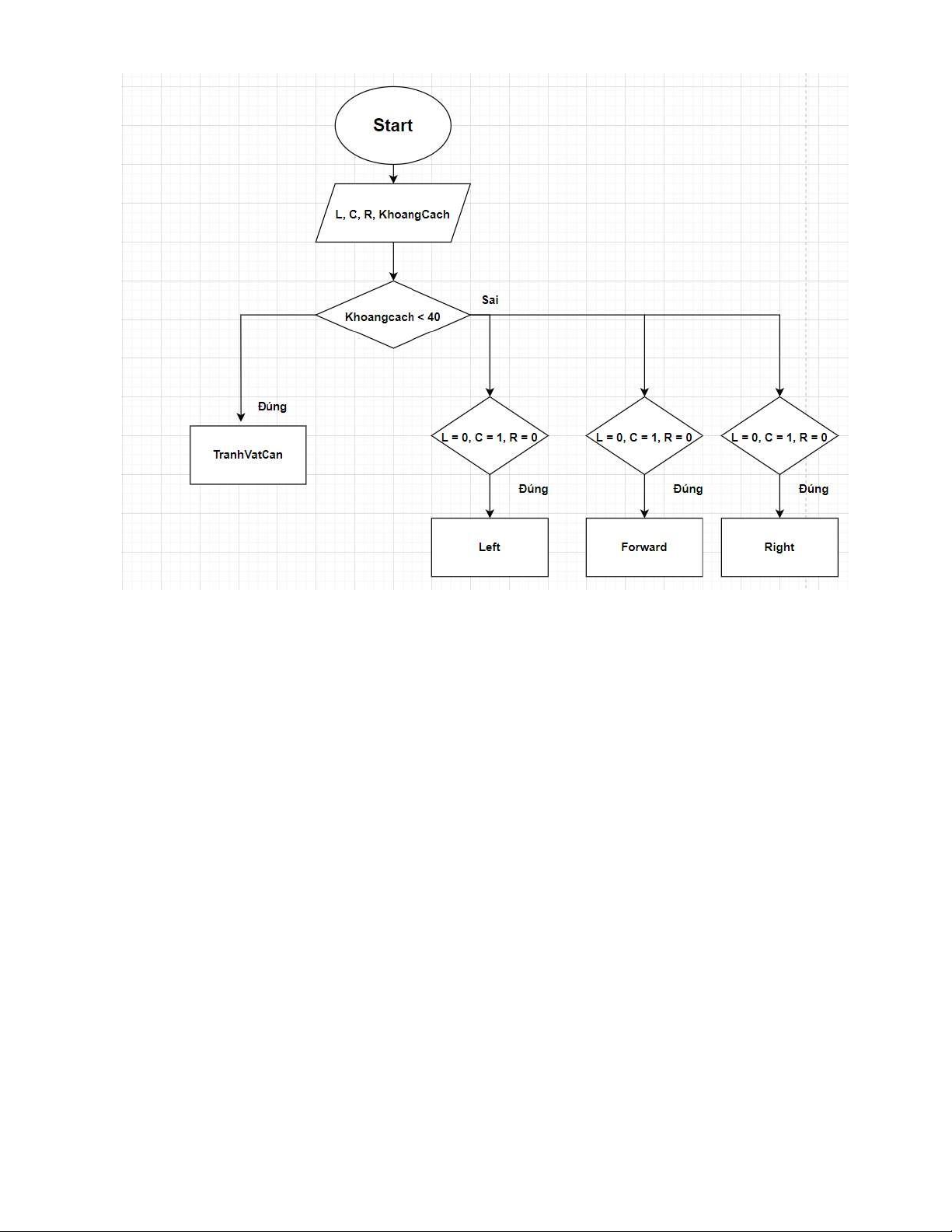
Chương 3: Phân tích hệ thống 3.1. Sơ đồ khối của hệ thống
3.2. Vai trò của từng khối
• Khối Start: Thực thi ngay sau khi cấp nguồn cho robot.
• L, C, R, Khoangcach: khai báo các biến để lưu trữ dữ liệu.
• Khối xử lý, rẽ nhánh: khối rẽ nhánh giúp phân luồng các điều kiện đo được từ các
sensor sau đó gửi về khối xử lý để xử lý tín hiệu.
• Khối thực thi: giúp robot di chuyển theo đúng chu trình.
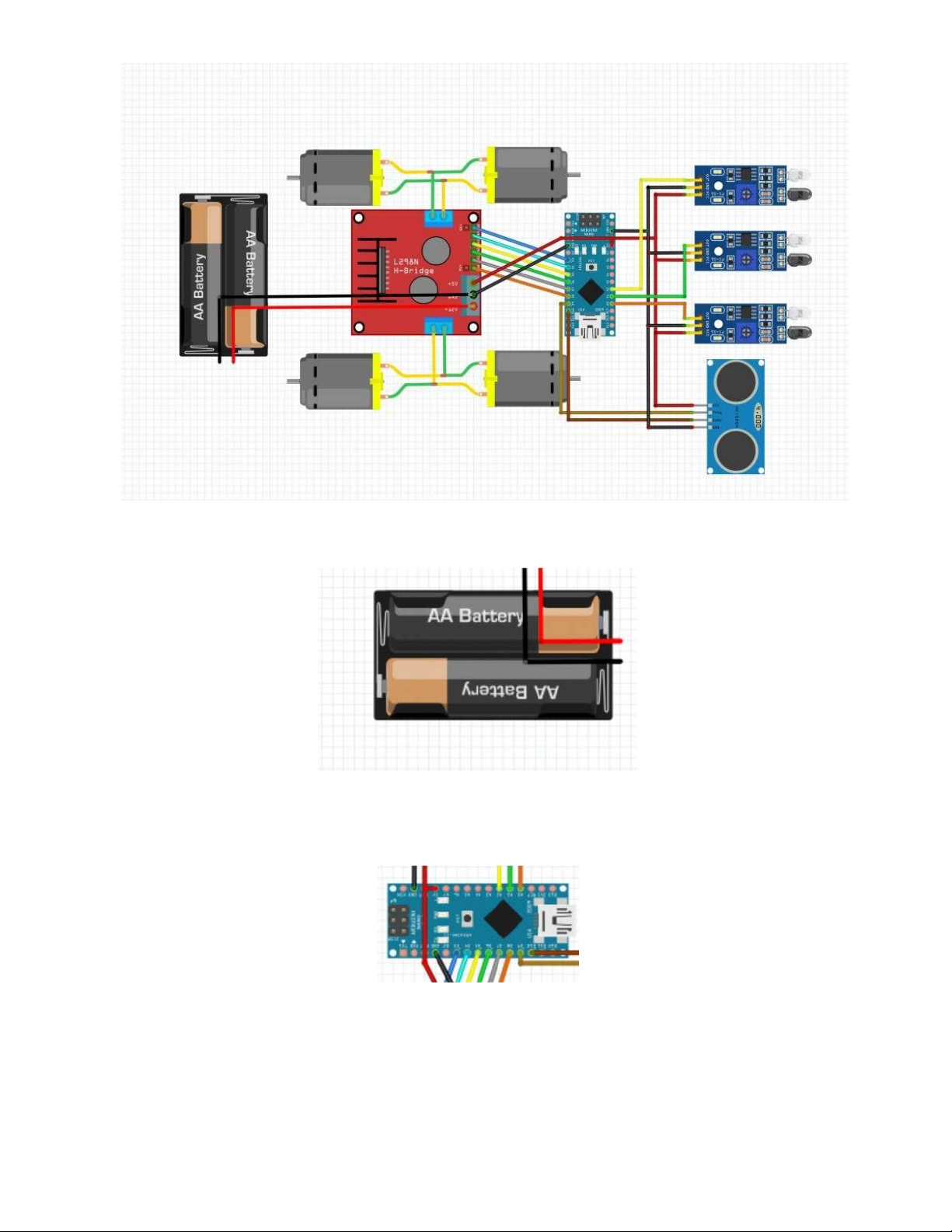
Chương 4: Thiết kế hệ thống 4.1. Sơ đồ mạch chi tiết của hệ thống
4.2. Chức năng chi tiết của từng khối 4.2.1. Khối nguồn
Chức năng: Cấp nguồn cho hệ thống.
4.2.2. Khối điều khiển
Chức năng: nhận tín hiệu điều khiển từ các sensor để điều khiển động cơ robot 4.2.3. Sensor dò line
Chức năng: Xác định đường line để gửi về arduino xử lý.
4.3. Triển khai xây dựng hệ thống B1: Tìm hiểu hệ thống.
B2: Triển khai kết nối phần cứng.
B3: Code giao tiếp giữa arduino với các sensor.
B4: Tiến hành chạy thử.
B5: Xử lý các vấn đề phát sinh trong quá trình vận hành.
Chương 5: Kết quả và kết luận 5.1. Kết quả
Xe AGV đã hoàn thành kịp tiến độ. Quá trình làm việc nhóm hiệu quả, phần gắn
mạch và đấu nối mạch, lập trình được phân chia đảm bảo sự liên kết giữa các thành viên
trong nhóm. Cảm biến siêu âm được bố trí khoa học, giảm tình trạng nhiễu và gây cản trở hoạt động. 5.2. Kết luận
Nhờ có sự hướng dẫn tận tình của thầy giáo bộ môn nên nhóm chúng em sau 1 kỳ
học vừa qua đã hoàn thiện sản phẩm xe robot AGV mini (dò line, tránh vật cản). Nhìn
chung sản phẩm hoạt động ổn định trong môi trường ít bị ảnh hưởng bới ánh sáng mặt trời
tác động vào mắt cảm biến dò line, xe hoạt động trên đường line cố định và tự động tránh
vật cản trong quá trình di chuyển.
Chương 6: Tài liệu tham khảo
[1] Arduino Workshop: A Hands-On Introduction with 65 Projects.
[2] Programming Arduino: Getting Started with Sketches, Second Edition.
[3] HC-SR04 Datasheet (HTML) - List of Unclassifed Manufacturers
[4] http://www.farnell.com/datasheets/1682238.pdf
Tài liệu liên quan:
-

Basic Linux academic and C Shell cook book môn Linux hệ nhúng theo chuẩn kỹ năng ITSS | Trường Đại học Bách Khoa Hà Nội
145 73 -

Quản lý nhật ký trong HĐH Linux môn Linux hệ nhúng theo chuẩn kỹ năng ITSS | Trường Đại học Bách Khoa Hà Nội
90 45 -

Bài tập lớn Đề tài: Tìm hiểu, cài đặt và thử nghiệm wordpress môn Linux hệ nhúng theo chuẩn kỹ năng ITSS | Trường Đại học Bách Khoa Hà Nội
98 49 -

Hệ thống nhúng - So sánh điện áp và điều khiển LED môn Linux hệ nhúng theo chuẩn kỹ năng ITSS | Trường Đại học Bách Khoa Hà Nội
83 42