Đồ án thiết kế bộ chỉnh lưu cầu 1, pha để điều khiển tốc độ động cơ điện 1 chiều kích từ độc lập có đảo chiều | Trường Cao Đẳng Công Nghệ Bách Khoa Hà Nội
Đồ án thiết kế bộ chỉnh lưu cầu 1, pha để điều khiển tốc độ động cơ điện 1 chiều kích từ độc lập có đảo chiều | Trường Cao Đẳng Công Nghệ Bách Khoa Hà Nội. Tài liệu được biên soạn dưới dạng file PDF gồm 36 trang giúp bạn tham khảo, ôn tập và đạt kết quả cao trong kỳ thi sắp tới. Mời bạn đọc đón xem!
Môn: Thiết bị điện tử 1 tài liệu
Trường: Trường Cao đẳng Công Nghệ Bách Khoa Hà Nội 106 tài liệu
Tác giả:














Preview text:
MỤC LỤC
CHƯƠNG 1: TỔNG QUAN VỀ ĐỘNG CƠ ĐIỆN MỘT CHIỀU, CÁC PHƯƠNG PHÁP ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ, PHƯƠNG PHÁP LỰA CHỌN 6
CHƯƠNG 2: LÝ THUYẾT VỀ CHỈNH LƯU HÌNH CẦU 1 PHA KÉP ĐIỀU KHIỂN HOÀN TOÀN, CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN, LỰA CHỌN 11
CHƯƠNG 3: THIẾT KẾ VÀ TÍNH CHỌN CÁC PHẦN TỬ MẠCH ĐỘNG LỰC 16
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 2
CHƯƠNG 4 THIẾT KẾ CÁC PHẦN TỬ MẠCH ĐIỀU KHIỂN 23
CHƯƠNG 5: MẠCH BẢO VỆ VÀ KẾT LUẬN 31
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 3
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 4
Hình 1. 1 Cấu tạo của động cơ điện 1 chiều 6
Hình 1. 2 Cấu tạo của động cơ điện 1 chiều 7
Hình 1. 3 Mô tả nguyên lí làm việc của động cơ điện một chiều 7
Hình 1. 4 Đặc tính cơ (tốc độ) của động cơ điện một chiều khi thay đổi điện áp phần ứng 8
Hình 1. 5 Đặc tính cơ (tốc độ) của động cơ điện một chiều 9
Hình 1. 6 Đặc tính cơ (tốc độ) động cơ điện một chiều 9
Hình 1. 7 Đặc tính cơ (tốc độ) khi thay đổi từ thông Φ 10
Hình 1. 8 Đồ thị đặc tính cơ khi thay đổi từ thông Φ 10
Y
Hình 2. 1 Sơ đồ chỉnh lưu cầu 1 pha kép điều khiển hoàn toàn 11
Hình 2. 2 Sơ đồ chỉnh lưu cầu 1 pha có điều khiển 11
Hình 2. 3 Đồ thị u, i của chỉnh lưu hình cầu 1 pha có điều khiển. 12
Hình 2. 4 Sơ đồ bộ chỉnh lưu kép 13
Hình 2. 5 Giản đồ dòng điện – PP điều khiển riêng 14
Hình 2. 6 Điện áp trên các bộ chỉnh lưu 1
Hình 3. 1 Sơ đồ khối mạch động lực 16
Y
Hình 4. 1 Bản vẽ tổng quát mạch công suất và mạch điều khiển 23
Hình 4. 2 Sơ đồ mạch điều khiển thyristor 24
Hình 4. 4 Nguyên tắc điều khiển thẳng đứng tuyến tính 25
Hình 4. 5 Sơ đồ khâu mạch đồng pha 25
Hình 4. 6 Sơ đồ dạng sóng , , 26
Hình 4. 7 sơ đồ khâu so sánh dùng opamp 26
Hình 4. 8 Sơ đồ dạng sóng của khâu so sánh 27
Hình 4. 9 Sơ đồ mạch tạo và 27
Hình 4. 10 Sơ đồ phối hợp tạo xung chùm 28
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 5
Hình 4. 11 Sơ đồ phối hợp tạo xung chùm 28
Hình 4. 12 Sơ đồ dạng sóng và 29
Hình 4. 13 Sơ đồ mạch khâu khuếch đại 29
Hình 5. 1 Cánh tản nhiệt trong thực tế 33
Hình 5. 2 Sơ đồ bảo vệ các thiết bị biến đổi dùng cầu chì 35
Hình 5. 3 Sơ đồ bảo vệ dùng mạch RLC 35
Hình 5. 4 Dùng mạch RC để bảo vệ quá áp 36
Hình 5. 5 Sơ đồ bảo vệ của mạch động lực 37
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 6
CHƯƠNG 1: TỔNG QUAN VỀ ĐỘNG CƠ ĐIỆN MỘT CHIỀU, CÁC PHƯƠNG PHÁP ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ, PHƯƠNG PHÁP LỰA CHỌN
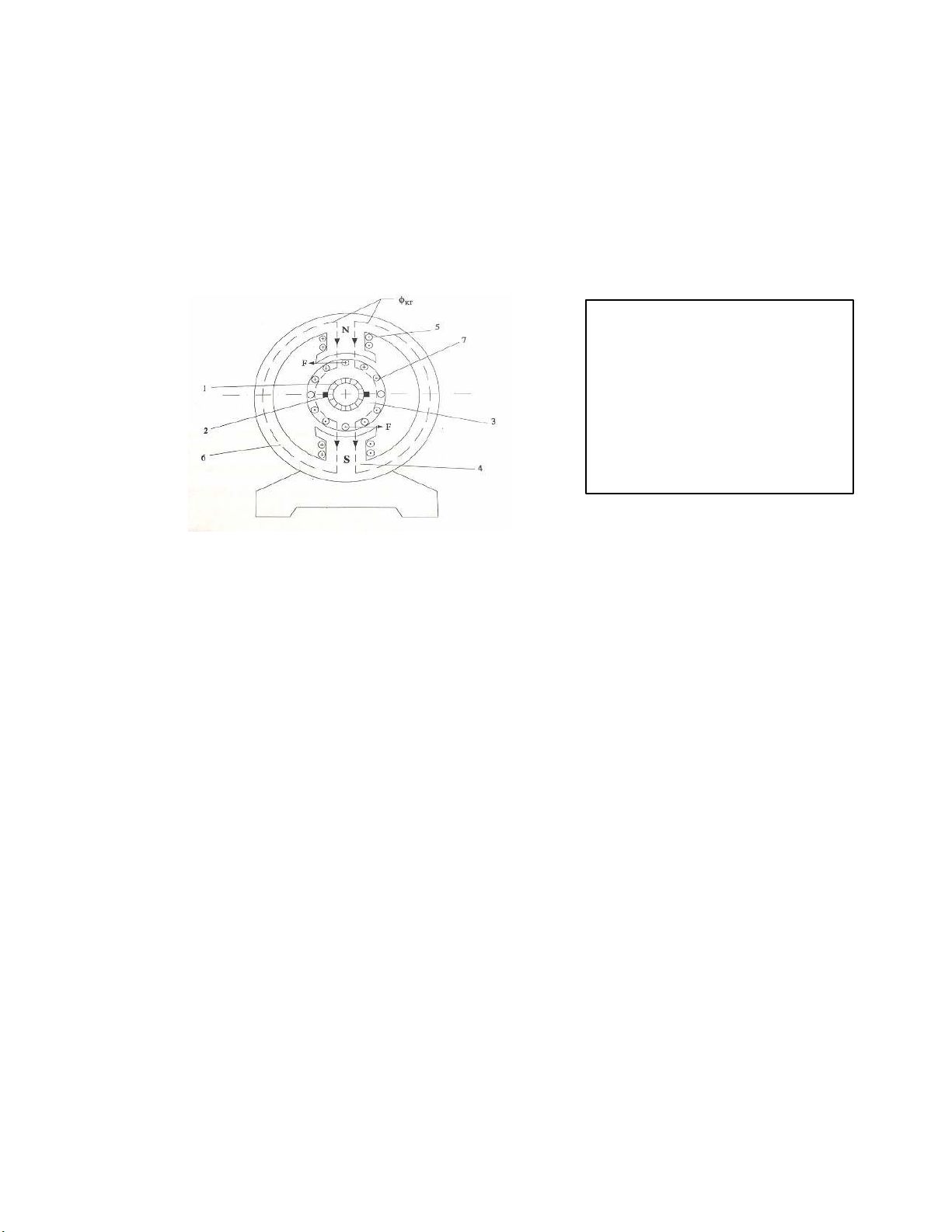
Cấu tạo:
- Cổ góp điện
- Chổi than
- Rotor
- Cực từ
- Cuộn dây kích từ
- Stato
- Cuộn dây phần ứng
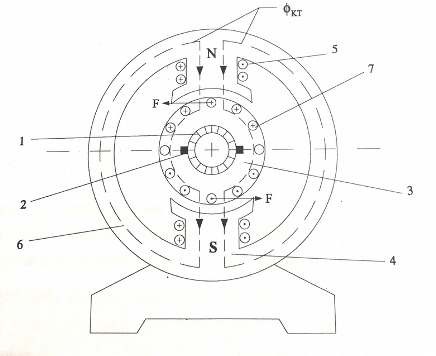
Hình 1. 1 Cấu tạo của động cơ điện 1 chiều
Cấu tạo của động cơ điện một chiều gồm 2 phần chính: phần mạch kích từ (tạo ra từ trường) và phần quay roto.
Từ trường được tạo ra nhờ các cuộn dây (5) có dòng điện một chiều chạy qua. Các cuộn dây này gọi là cuộn kích từ và được quấn quanh các cực từ (4). Trường hợp như hình vẽ, stato (6) của động cơ có đặt các cuộn dây kích từ nên stato còn gọi là phần kích từ (hay phần cảm). Từ trường do phần kích từ tạo ra sẽ tác dụng một từ lực vào các dây dẫn (7) đặt trong các rãnh của rôto (3) khi có dòng điện chạy qua. Cuộn dây đặt trong các rãnh rôto gọi là cuộn dây phần ứng. Dòng điện đưa vào cuộn dây phần ứng qua các chổi than (2) và cổ góp 1. Rôto mang cuộn dây phần ứng nên còn gọi là phần ứng.
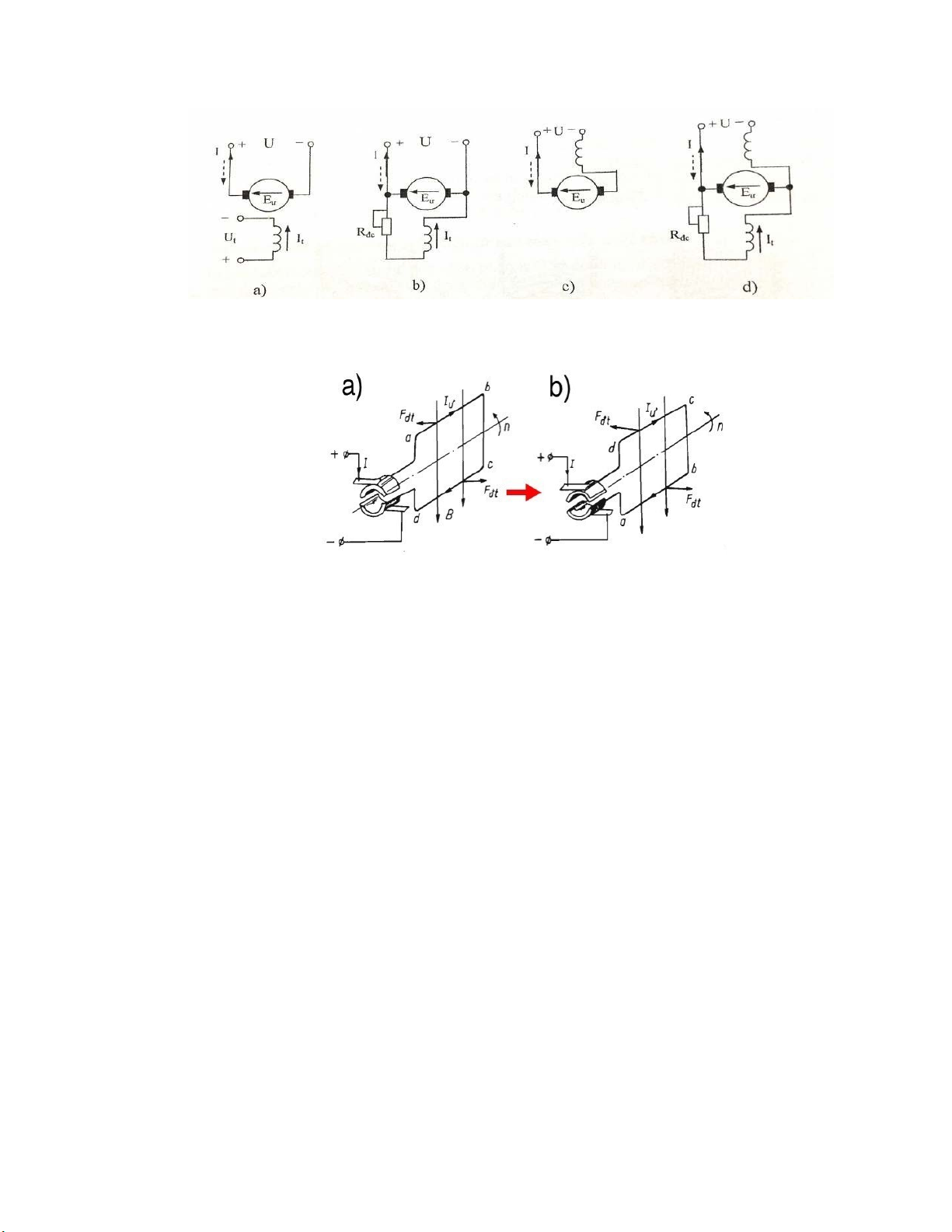
Phân loại máy điện một chiều
Máy điện một chiều kích từ độc lập (hình 1.2a): mạch phần ứng không liên hệ trực tiếp về điện với mạch kích từ.
Máy điện một chiều kích từ song song (hình 1.2b): mạch kích từ nối song song với mạch phần ứng.
Máy điện một chiều kích từ nối tiếp (hình 1.2c): mạch kích từ mắc nối tiếp với mạch phần ứng.
Máy điện một chiều kích từ hỗn hợp (hình 1.2d): vừa kích từ song song vừa kích từ nối tiếp.
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 7
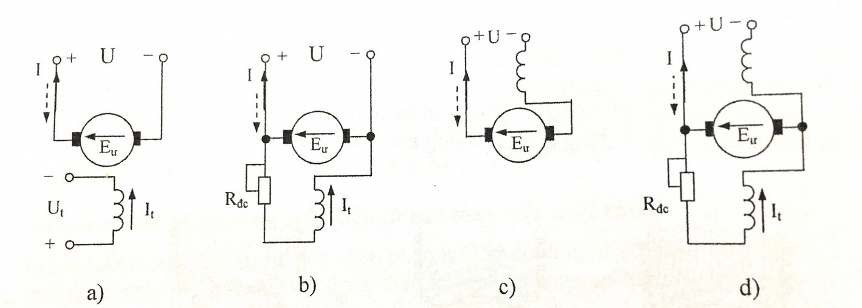
Hình 1. 2 Cấu tạo của động cơ điện 1 chiều
Nguyên lí hoạt động:
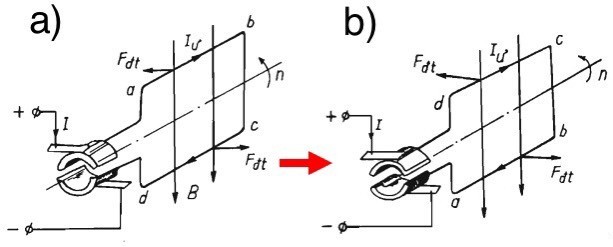
Hình 1. 3 Mô tả nguyên lí làm việc của động cơ điện một chiều.
Trên hình 1.3 khi cho điện áp 1 chiều U vào 2 chổi điện A và B, trong dây quấn phần ứng có dòng điện. Các thanh dẫn ab, cd mang dòng điện nằm trong từ trường sẽ chịu lực tác dụng tương hỗ lên nhau tạo nên momen tác dụng lên rôto, làm rôto quay. Chiều lực tác dụng được xác định theo quy tắc bàn tay trái (hình 1.3 a)
Khi phần ứng quay được nửa vòng, vị trí thanh dẫn ab, cd đổi chỗ nhau (hình 1.3 b), nhờ có phiến góp đổi chiều dòng điện nên dòng điện một chiều biến đổi thành dòng điện xoay chiều đưa vào dây quấn phần ứng, giữ cho chiều lực tác dụng không đổi do đó lực tác dụng lên rôto cũng theo một chiều nhất định, đảm bảo động cơ có chiều quay không đổi.
Các phương pháp điều chỉnh tốc độ động cơ:
Để thay đổi tốc độ động cơ điện một chiều từ đặc tính cơ:
Với: : Điện áp phần ứng (V)
: Điện trở của mạch phần ứng (Ω)
: Điện trở phụ trong mạch phần ứng (Ω)
: Từ thông kích từ dưới một cực từ ()
: Momen điện từ (N.m)
- Ta có 3 phương pháp điều chỉnh tốc độ:
+Điều chỉnh tốc độ bằng cách thay đổi điện áp phần ứng
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 8
+Điều chỉnh tốc độ bằng cách thay đổi điện tử phụ
+Điều chỉnh tốc độ bằng cách thay đổi từ thông
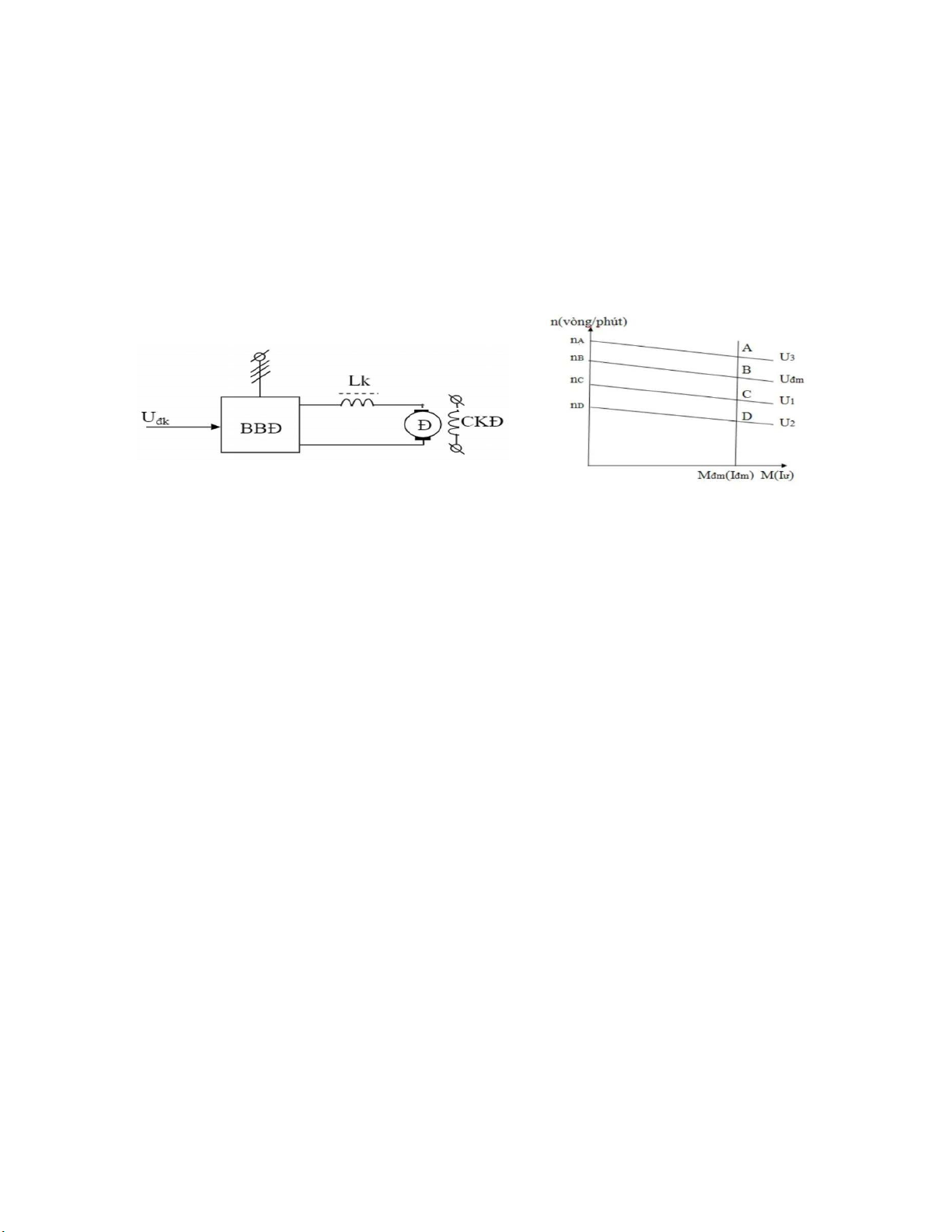
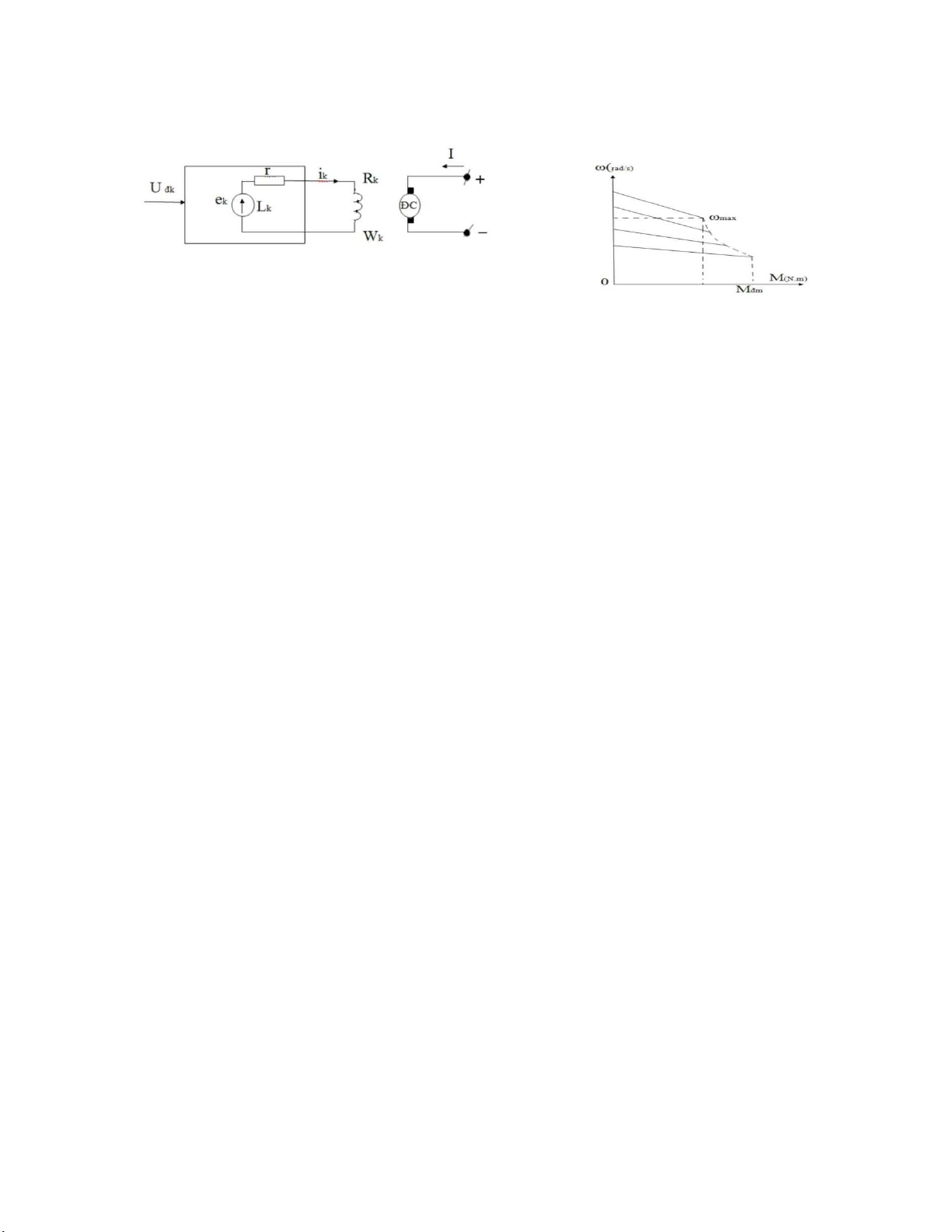
Phương pháp này được sử dụng khi có hai nguồn. Một nguồn có thể điều chỉnh điện áp được để nối với mạch phần ứng và một nguồn khác nối với mạch kích từ.
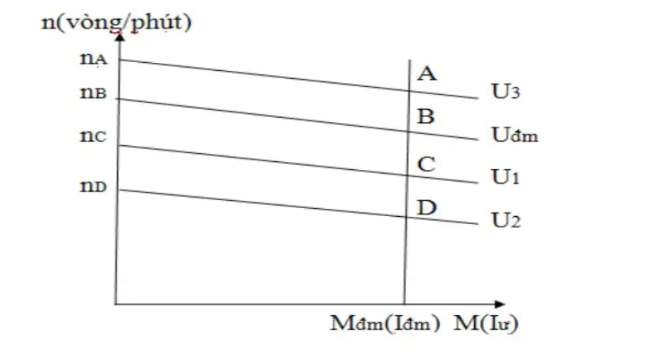
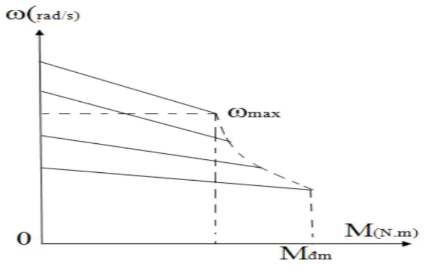
Hình 1. 4 Đặc tính cơ (tốc độ) của động cơ điện một chiều khi thay đổi điện áp phần ứng
Nhận xét:
Ta có từ thông được giữ không đổi, điện áp phần ứng được cấp từ bộ biến đổi. Khi thay đổi U cấp cho cuộn dây phần ứng, ta có họ đặc tính cơ tương ứng với các tốc độ tải khác nhau, song song nhau như Hình 1.4b. Đường B ứng với , đường C và D ứng với , còn đường A ứng với . Nhưng việc điều chỉnh điện áp thường . Nên phương pháp này chỉ cho phép điều chỉnh giảm tốc độ. Còn xem có được phép không, nếu có cho phép thì không nhiều lắm.
Đặc điểm của phương pháp:
- Điện áp phần ứng càng giảm thì tốc độ động cơ càng nhỏ
- Điều chỉnh trơn trong toàn bộ dải điều chỉnh
- Độ cứng đặc tính cơ () giữ không đổi trong toàn bộ dải điều chỉnh
- Độ sụt tốc tuyệt đối tuyệt đối trên toàn dải điều chỉnh ứng với một momen là như nhau. Độ sụt tốc tương đối sẽ lớn nhất tại đặc tính cơ thấp nhất của dải điều chỉnh. Do vậy sai số tốc độ tương đối (sai số tĩnh) của đặc tính cơ thấp nhất không vượt quá sai số cho phép cho toàn dải điều chỉnh.
- Dải điều chỉnh phương pháp này có thể: ~ 10 : 1
- Chỉ thay đổi tốc độ về phía giảm (vì chỉ có thể thay đổi )
- Phương pháp này cần một bộ nguồn có thể thay đổi trơn điện áp ra.
=>> Phương pháp này rất kinh tế, tổn hao ít năng lượng và phạm vi điều chỉnh rộng. Nên kết hợp với phương pháp điều chỉnh từ thông để có thể điều chỉnh tốc độ lớn hơn và nhỏ hơn tốc độ định mức.
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 9
Hình 1. 5 Đặc tính cơ (tốc độ) của động cơ điện một chiều khi thay đổi điện áp phần ứng
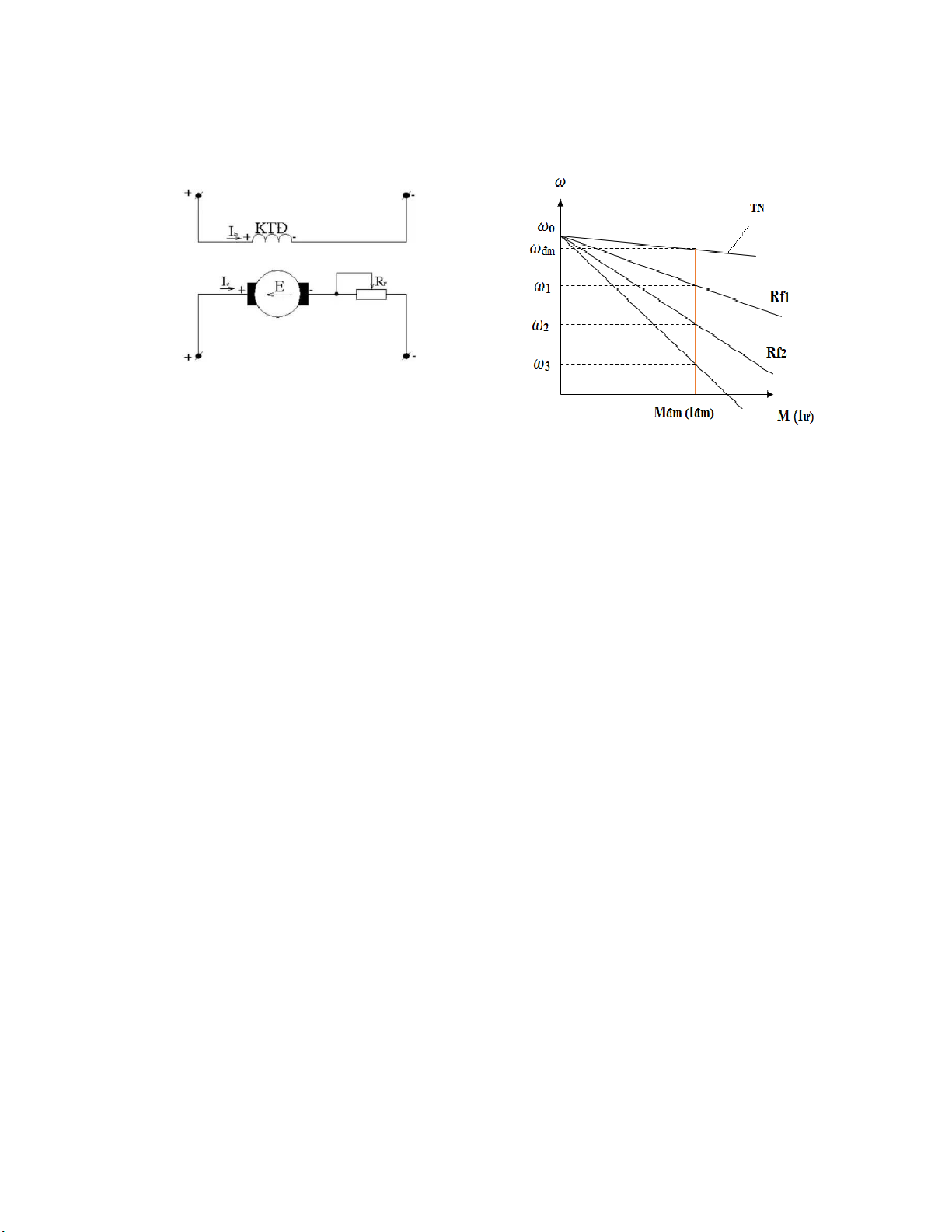
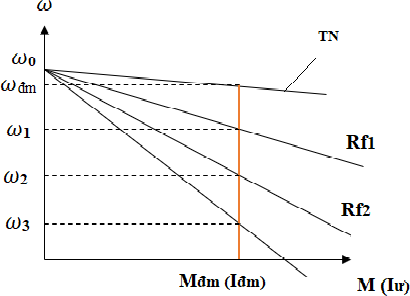
Hình 1. 6 Đặc tính cơ (tốc độ) động cơ điện một chiều
Nhận xét:
với các R_f khác nhau
Khi mắc thêm điện trở phụ vào mạch phần ứng và tăng điện trở mạch phần ứng , đặc tính cơ dốc xuống, tốc độ động cơ giảm dần. Do dòng điện phần ứng lớn nên tổn hao công suất trên điện trở điều chỉnh lớn. Phương pháp này chỉ sử dụng ở động cơ công suất nhỏ. Dù động cơ không tải có thay đổi điện trở phụ thì tốc độ động cơ cũng không đổi (giữ nguyên tốc độ không tải lý tưởng).
Đặc điểm của phương pháp:
- Điện trở mạch phần ứng càng tăng, độ dốc đặc tính cơ càng lớn (càng mềm), độ ổn định tốc độ càng kém và sai số tốc độ càng lớn.
- Phương pháp này cho phép thay đổi tốc độ về phía giảm (do chỉ có thể tăng thêm điện trở).
- Vì điều chỉnh tốc độ nhờ thêm điện trở vào mạch phần ứng nên tổn hao công suất dưới dạng nhiệt trên điện trở phụ khi điều chỉnh là khá lớn.
- Dải điều chỉnh phụ thuộc trị số momen tải. Tải càng nhỏ () thì dải điều chỉnh D càng nhỏ. Nói chung phương pháp này cho: ~ 5 : 1
- Về nguyên tắc phương pháp này cho điều chỉnh trơn nhờ thay đổi đều điện trở nhưng vì dòng Rotor lớn nên việc chuyển đổi điện trở sẽ khó khăn. Thực tế thường thực hiện chuyển đổi theo từng cặp điện trở.
=>> Với những đặc điểm trên lại gây tổn hao nên phương pháp này ít được sử dụng. Chỉ phù hợp khi khởi động động cơ. Thiết bị được dùng cho các động cơ cần trục, thang máy, máy nâng, máy xúc.
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 10
Hình 1. 7 Đặc tính cơ (tốc độ) khi thay đổi từ thông Φ
Hình 1. 8 Đồ thị đặc tính cơ khi thay đổi từ thông
Φ
Nhận xét:
Muốn thay đổi từ thông động cơ, ta tiến hành thay đổi dòng điện kích từ của động cơ qua một điện trở mắc nối tiếp ở mạch kích từ. Phương pháp này chỉ cho phép tăng điện trở vào mạch kích từ nghĩa là chỉ có thể giảm dòng điện kích từ () do đó chỉ có thể thay đổi về phía giảm từ thông. Khi giảm từ thông, đặc tính dốc hơn và có tốc độ không tải lớn hơn. Ta có họ đặc tính cơ khi giảm từ thông như ở trên.
Đặc điểm của phương pháp:
- Từ thông càng giảm thì tốc độ không tải lý tưởng của đặc tính cơ càng tăng, tốc độ động cơ càng lớn, mềm hơn. Có dòng ngắn mạch không đổi.
- Có thể điều chỉnh trơn trong dải điều chỉnh: ~ 3 : 1
- Chỉ thay đổi được tốc độ về phía tăng theo phương pháp này.
- Do độ dốc đặc tính cơ tăng lên khi giảm từ thông nên các đặc tính cơ sẽ cắt nhau.
- Phương pháp này rất kinh tế vì việc điều chỉnh tốc độ thực hiện ở mạch kích từ nên tổn thất năng lượng ít, thiết bị đơn giản nên giá thành thấp.
=> Vì việc điều chỉnh được thực hiện trên mạch kích từ nên ít tổn thất năng lượng và thiết bị đơn giản nên giá thành thấp. Phương pháp này thường được dùng cho các máy như: máy mài vạn năng, máy bào giường, ….
Kết Luận:
Qua 3 phương pháp điều chỉnh tốc độ động cơ điện một chiều đã được phân tích và trình bày trên thì em lựa chọn phương pháp điều chỉnh tốc độ động cơ bằng cách thay đổi điện áp phần ứng () là phương pháp tối ưu nhất và triệt để nhất để thiết kế bộ chỉnh lưu.
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 11
CHƯƠNG 2: LÝ THUYẾT VỀ CHỈNH LƯU HÌNH CẦU 1 PHA KÉP ĐIỀU KHIỂN HOÀN TOÀN, CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN, LỰA CHỌN
Sơ đồ nguyên lý:
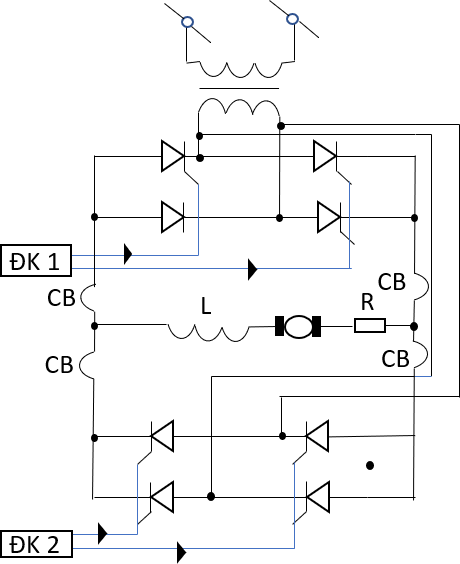 Bộ chỉnh lưu cầu 1 pha kép điều khiển hoàn toàn có cấu tạo gồm bộ chỉnh lưu cầu 1 pha có điều khiển mắc song song ngược nhau.
Bộ chỉnh lưu cầu 1 pha kép điều khiển hoàn toàn có cấu tạo gồm bộ chỉnh lưu cầu 1 pha có điều khiển mắc song song ngược nhau.
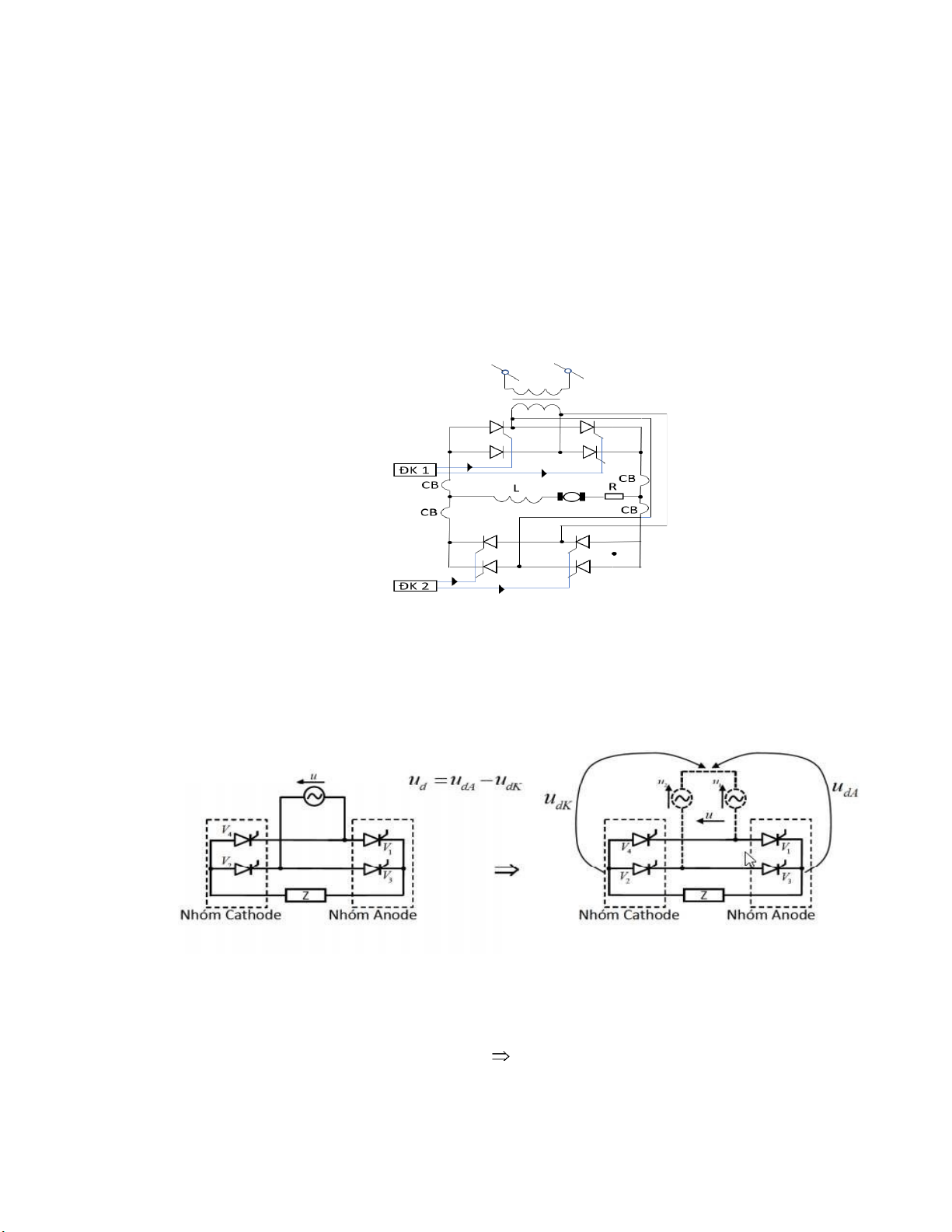
Hình 2. 1 Sơ đồ chỉnh lưu cầu 1 pha kép điều khiển hoàn toàn
Nguyên lý hoạt động:
Để phân tích nguyên lý hoạt động ta tách ra một sơ đồ chỉnh lưu để phân tích. Đây là sơ đồ mạch chỉnh lưu cầu 1 pha có điều khiển.
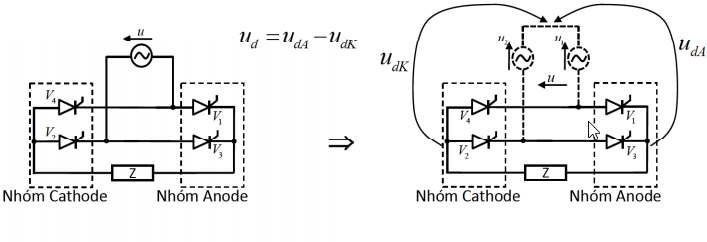
Hình 2. 2 Sơ đồ chỉnh lưu cầu 1 pha có điều khiển
Tải
Thyristor lý tưởng
Tương đương nguồn điện áp u  Hai bộ chỉnh lưu hình tia 2 pha mắc thành hai nửa bằng nhau và nối tiếp
Hai bộ chỉnh lưu hình tia 2 pha mắc thành hai nửa bằng nhau và nối tiếp
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 12
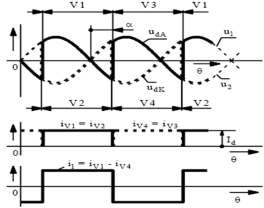
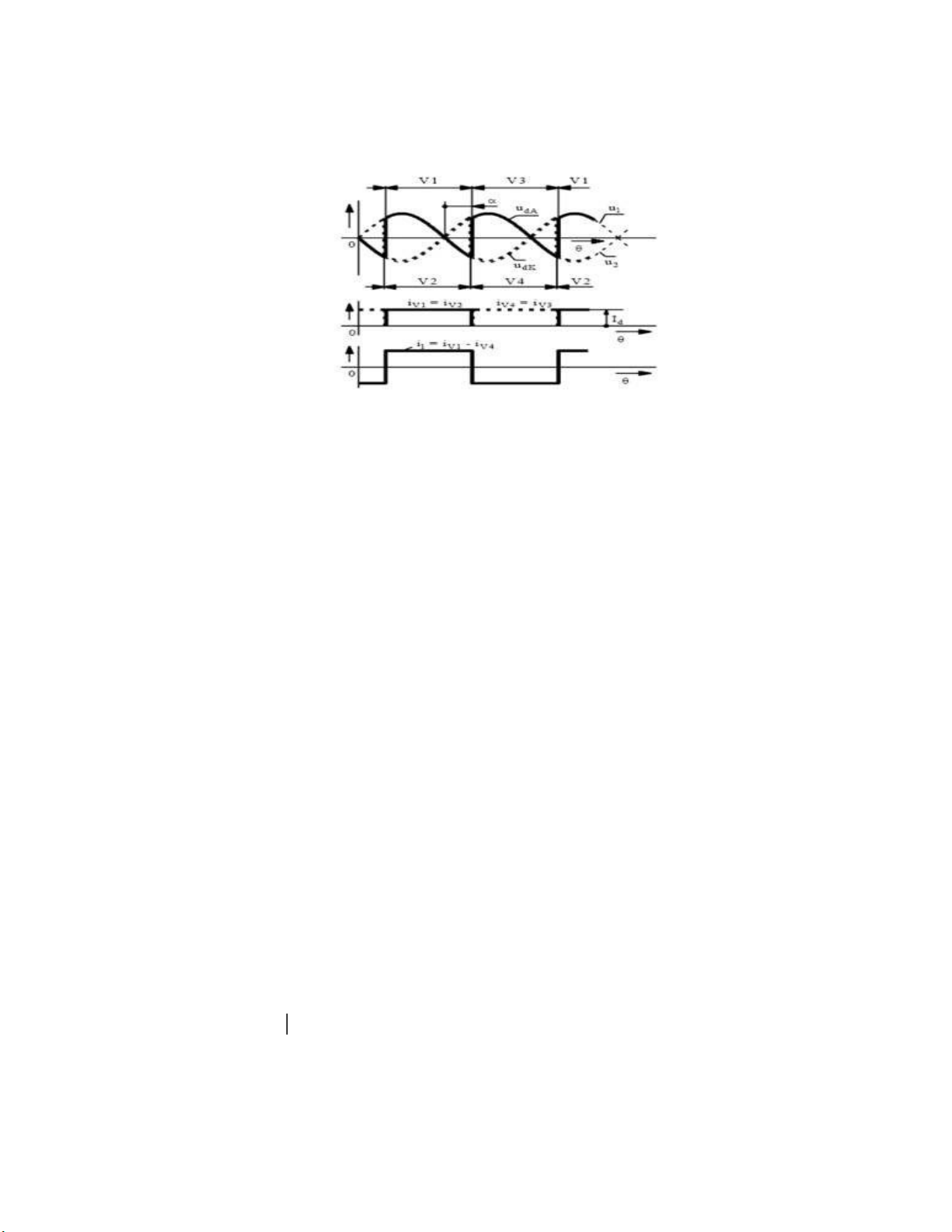
Hình 2. 3 Đồ thị u, i của chỉnh lưu hình cầu 1 pha có điều khiển.
Nguyên lý hoạt động của chỉnh lưu cầu 1 pha điều khiển hoàn toàn được quy đổi thành phân tích hai nhóm mạch chỉnh lưu tia 2 pha
- Nhóm anode: gồm , . Góc điều khiển được tính từ thời điểm bắt đầu xuất hiện áp khoá trên linh kiện đến khi đưa xung kích vào cổng điều khiển, ví dụ đối với áp khoá tồn tại khi hay . Khi dẫn:
Khi dẫn:
- Nhóm cathode: gồm , Góc điều khiển α được tính từ thời điểm hay . Khi dẫn:
Khi dẫn :
Điện áp và dòng điện chỉnh lưu:
- Trị trung bình điện áp chỉnh lưu:

Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 13
- Dòng trung bình qua tải:
- Trị trung bình qua dòng Thyristor:
- Áp khoá và áp ngược cực đại đặt lên linh kiện:
- Dòng điện qua nguồn điện áp:
 Bộ chỉnh lưu cầu 1 pha kép có cấu tạo gồm hai bộ chỉnh lưu cầu 1 pha mắc song song ngược được sử dụng để điều khiển điện áp cung cấp cho động cơ từ đó điều khiển dòng điện đi qua động cơ theo hai chiều. Vì thế để có thể điều khiển hai bộ chỉnh lưu này ta có thể sử dụng 2 phương pháp sau:
Bộ chỉnh lưu cầu 1 pha kép có cấu tạo gồm hai bộ chỉnh lưu cầu 1 pha mắc song song ngược được sử dụng để điều khiển điện áp cung cấp cho động cơ từ đó điều khiển dòng điện đi qua động cơ theo hai chiều. Vì thế để có thể điều khiển hai bộ chỉnh lưu này ta có thể sử dụng 2 phương pháp sau:
- Phương pháp điều khiển riêng.
- Phương pháp điều khiển chung (Điều khiển phối hợp tuyến tính).
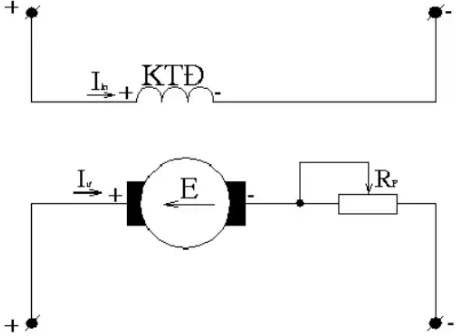
Phương pháp điều khiển riêng
Hình 2. 4 Sơ đồ bộ chỉnh lưu kép
Đây là phương pháp điều khiển mà tại mỗi thời điểm chỉ có mộ bộ chỉnh lưu hoạt động và bộ chỉnh lưu còn lại sẽ không hoạt động hay sẽ nghỉ hoàn toàn. Bộ chỉnh lưu 1 dùng để điều khiển dòng điện dương qua tải, bộ chỉnh lưu 2 dùng để điều khiển dòng điện âm qua tải.
Vì chỉ có một bộ chỉnh lưu hoạt động trong một thời điểm nên trong quá trình hoạt động sẽ không có dòng tuần hoàn qua bộ chỉnh lưu.
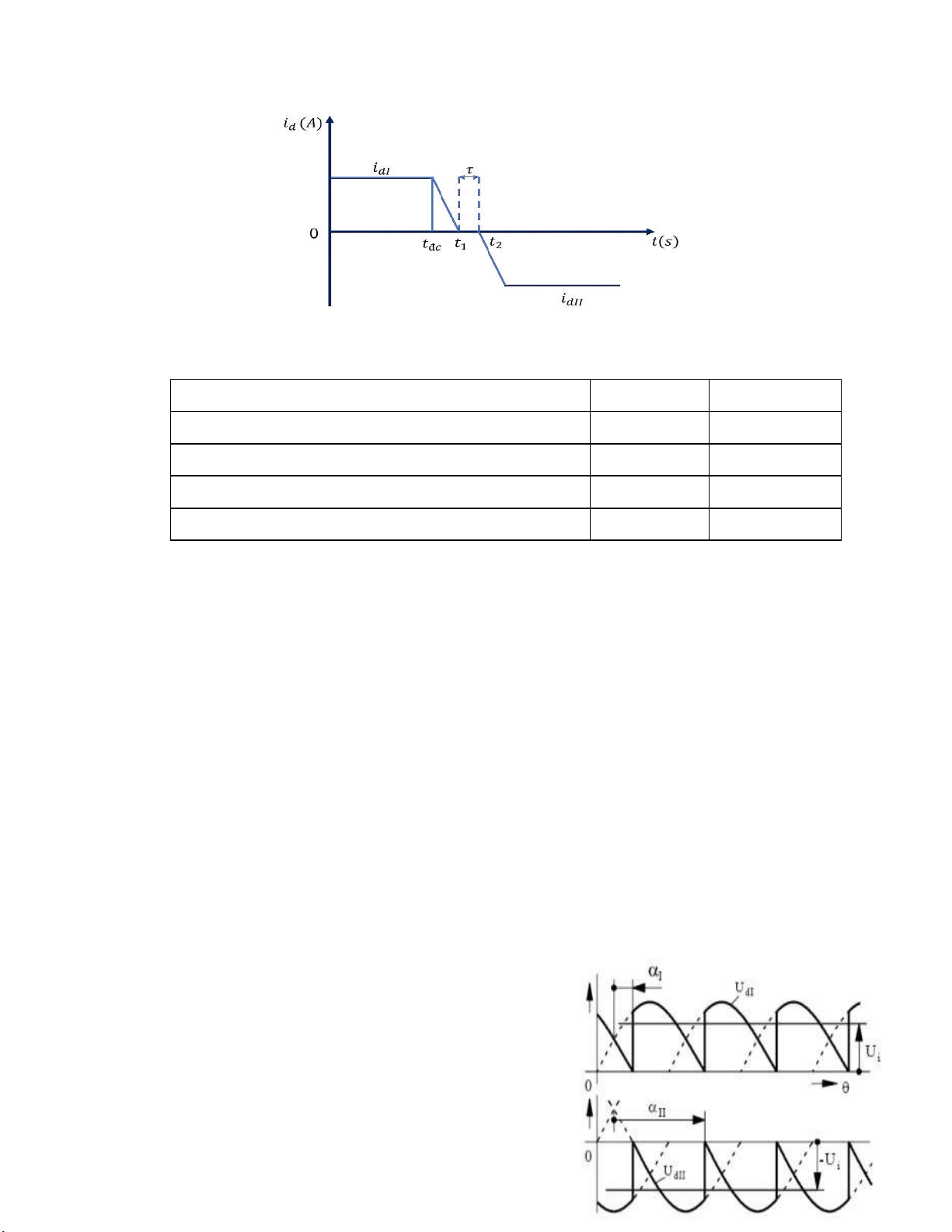
Lưu ý khi đảo chiều dòng điện, ví dụ từ dương về âm, ta điều chỉnh giá trị của góc mở để dòng điện giảm nhanh về 0. Khi dòng điện triệt tiêu, 2 bộ chỉnh lưu đều sẽ bị khóa kích trong một khoảng thời gian . Vì khi dòng qua bộ chỉnh lưu 1 vừa về 0, bộ chỉnh lưu 1 vẫn còn có khả năng dẫn điện trong thời gian ngắn nên nếu cấp xung kích cho bộ chỉnh lưu 2 sẽ gây ra hiện tượng ngắn mạch với dòng chạy qua bộ chỉnh lưu 1 và bộ chỉnh lưu 2.
Thời gian là khoảng thời gian cần thiết để cho bộ chỉnh lưu 1 khôi phục khả năng khóa, sau thời gian này bộ chỉnh lưu 2 sẽ được cấp xung kích để cho dòng điện qua tải theo chiều âm, trong khi bộ chỉnh lưu 1 vẫn được khóa hoàn toàn.
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 14
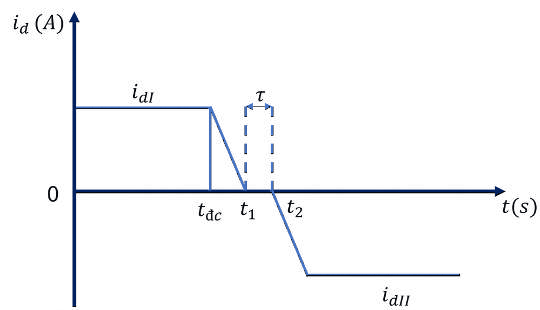
Hình 2. 5 Giản đồ dòng điện – PP điều khiển riêng
Bảng biểu diễn trạng thái của dòng (độ lớn) theo các xung kích:
Xung kích | ||
Kích BCL 1, khóa BCL 2 | > 0 | 0 |
Khóa BCL 1, khóa BCL 2 trong thời gian | 0 | 0 |
Khóa BCL 1, kích BCL 2 | 0 | >0 |
Khóa BCL 1, trong thời gian , khóa BCl 2 | 0 | 0 |
Ưu điểm: Không có dòng tuần hoàn qua bộ chỉnh lưu từ đó không cần dùng các cuộn kháng cân bằng.
Nhược điểm: Xuất hiện dòng gián đoạn khi đảo chiều.
Phương pháp điều khiển chung (Điều khiển phối hợp tuyến tính)
Đối với phương pháp điều khiển phối hợp tuyến tính ta đưa tín hiệu điều khiển đến cả hai bộ chỉnh lưu với các góc mở tương ứng là , thỏa mãn điều kiện:
Trong điều khiển phối hợp tuyến tính ta chọn:
Bộ chỉnh lưu 1 được điều khiển với góc mở làm việc ở chế độ chỉnh lưu. Bộ chỉnh lưu 2 được điều khiển với góc mở ở chế độ chờ.
 Điện áp chỉnh lưu trung bình trên tải, giả thuyết dòng liên tục:
Điện áp chỉnh lưu trung bình trên tải, giả thuyết dòng liên tục:
Bộ chỉnh lưu 1 Bộ chỉnh lưu 2 Vì nên
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướn
g dẫn: TS. Giáp Quang Huy
Từ đó, ta thấy thành phần một chiều cân bằng nhau nên không gây nên thành phần dòng điện khép vòng qua các van của hai bộ chỉnh lưu.
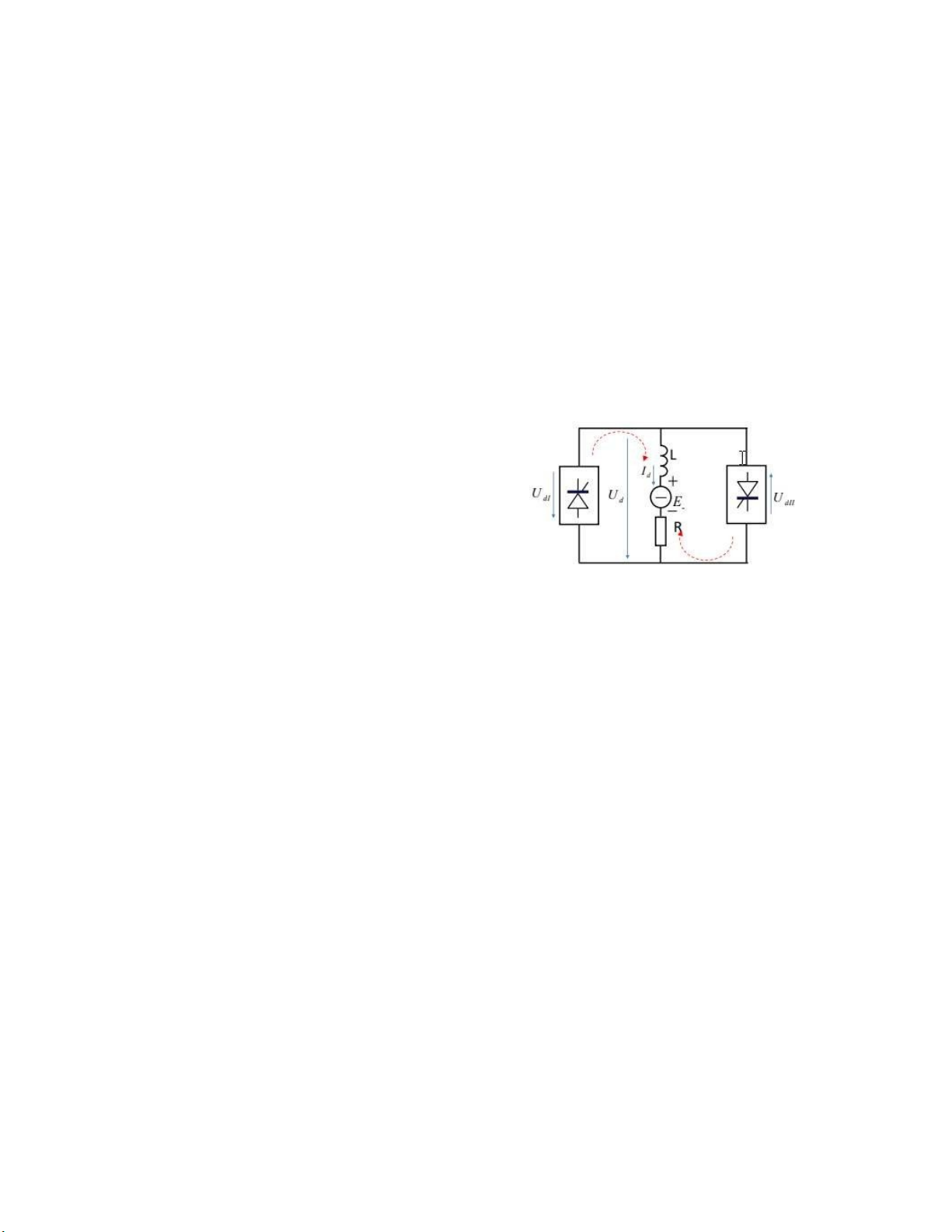
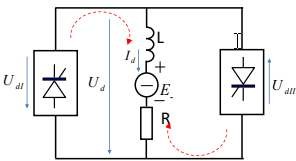
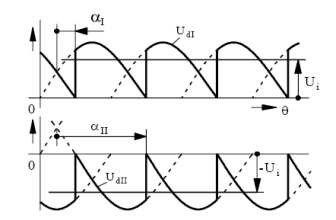
Khi đảo chiều dòng điện, giả sử rằng:
Bộ chỉnh lưu 1 đang làm việc ở chế độ chỉnh lưu, , . Bộ chỉnh lưu 2 đang ở chế độ chờ, , .
lưu
Hình 2. 6 Điện áp trên các bộ chỉnh
Vì nên xuất hiện dòng điện tuần hoàn trong mạch đi qua các van và các pha
nguồn mà không đi qua tải. Do tổng trở của nguồn là rất nhỏ nên dòng điện có thể rất lớn gây ra sự hư hỏng của các van và chế độ làm việc của bộ chỉnh lưu. Để hạn chế dòng điện tuần hoàn này, ở mỗi đầu ra của bộ chỉnh lưu ta phải mắc nối tiếp với cuộn kháng cân bằng để làm giảm biên độ dòng tuần hoàn trên.
Giá trị cực đại dòng tuần hoàn:
Ưu điểm: Có tốc độ tác động nhanh.
Nhược điểm: Vì phải thêm cuộn kháng cân bằng nên kích thước bộ biến đổi sẽ tăng và phải tăng công suất tính toán của máy biến áp để bù tổn thất do dòng cân bằng.
Kết Luận
Qua các phân tích về hai phương pháp điều khiển, cả hai phương pháp đều có thể áp dụng để điều khiển bộ chỉnh lưu cầu 1 pha kép. Nhưng để đảm bảo tốc độ tác động lên động cơ nhanh, tránh hiện tượng dòng gián đoạn khi đảo chiều ta lựa chọn phương pháp điều khiển chung (Điều khiển phối hợp tuyến tính).
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 16
CHƯƠNG 3: THIẾT KẾ VÀ TÍNH CHỌN CÁC PHẦN TỬ MẠCH ĐỘNG LỰC
Khái quát chung về mạch động lực:
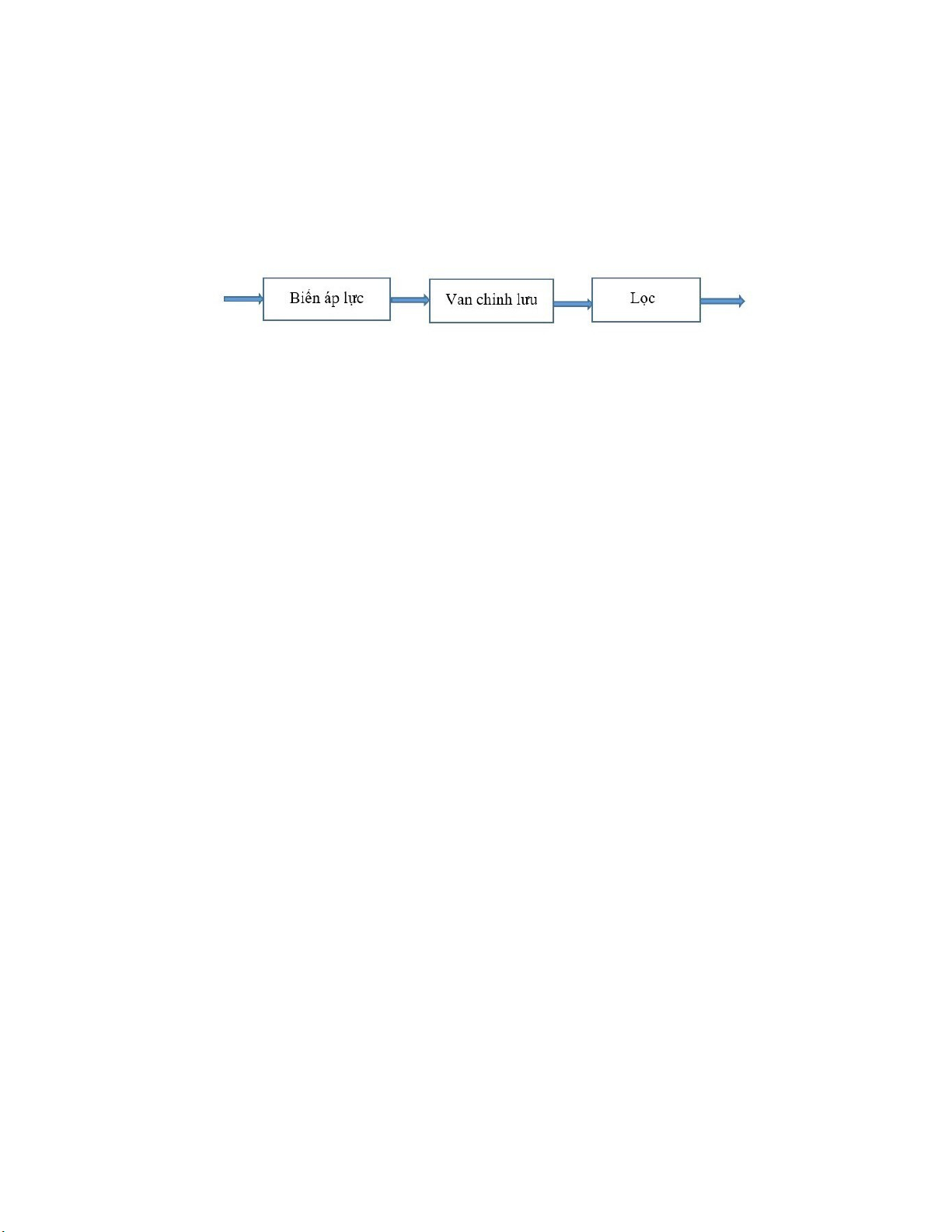
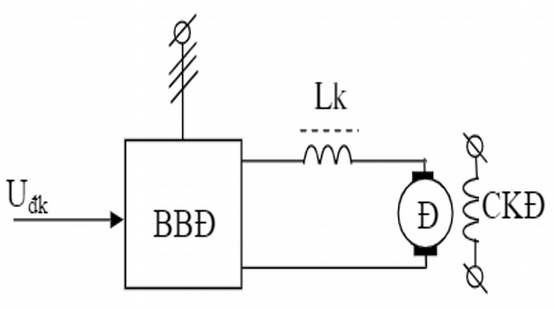
Sơ đồ khối mạch động lực:

Hình 3. 1 Sơ đồ khối mạch động lực
Chức năng các khối:
- Khối biến áp lực:
+ Chuyển đổi điện áp xoay chiều của lưới thành các mức điện áp cao lên hay thấp xuống tùy theo yêu cầu của tải.
+ Biến đổi số pha của nguồn lưới.
+ Cách ly với điện áp lưới.
- Khối van chỉnh lưu: Dùng các van bán dẫn (diode, thyristor) để biến đổi dòng điện xoay chiều thành một chiều.
- Khối lọc: Để lọc, san bằng độ gợn sóng giúp điện áp chỉnh lưu là điện áp 1 chiều, giữ cho điện áp một chiều ra trên tải được bằng phẳng theo yêu cầu.
Tính toán van chỉnh lưu
Khi lựa chọn van, ta dựa vào hai thông số cơ bản và quan trọng nhất là: điện áp ngược đặt lên van và dòng điện làm việc của van.
Điện áp ngược của van:
Điện áp ngược lớn nhất van phải chịu:
Với: thay vào phương trình trên ta có: Trong đó:
: Điện áp tải
: Điện áp nguồn xoay chiều
: Điện áp làm việc của van
: Hệ số điện áp ngược
: Hệ số điện áp chỉnh lưu
Điện áp ngược của van cần chọn:
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 17
Theo yêu cầu hệ số dự trữ điện áp ta chọn
Dòng điện làm việc của van:
Dòng điện làm việc của van:
Với dòng điện tải :
: Dòng điện hiệu dụng qua van.
: Dòng điện định mức trên tải.
: Hệ số xác định dòng điện hiệu dụng ứng với sơ đồ cầu 1 pha điều khiển hoàn
toàn.
Dòng điện định mức của van:
Theo yêu cầu hệ số dự trữ dòng điện ta chọn
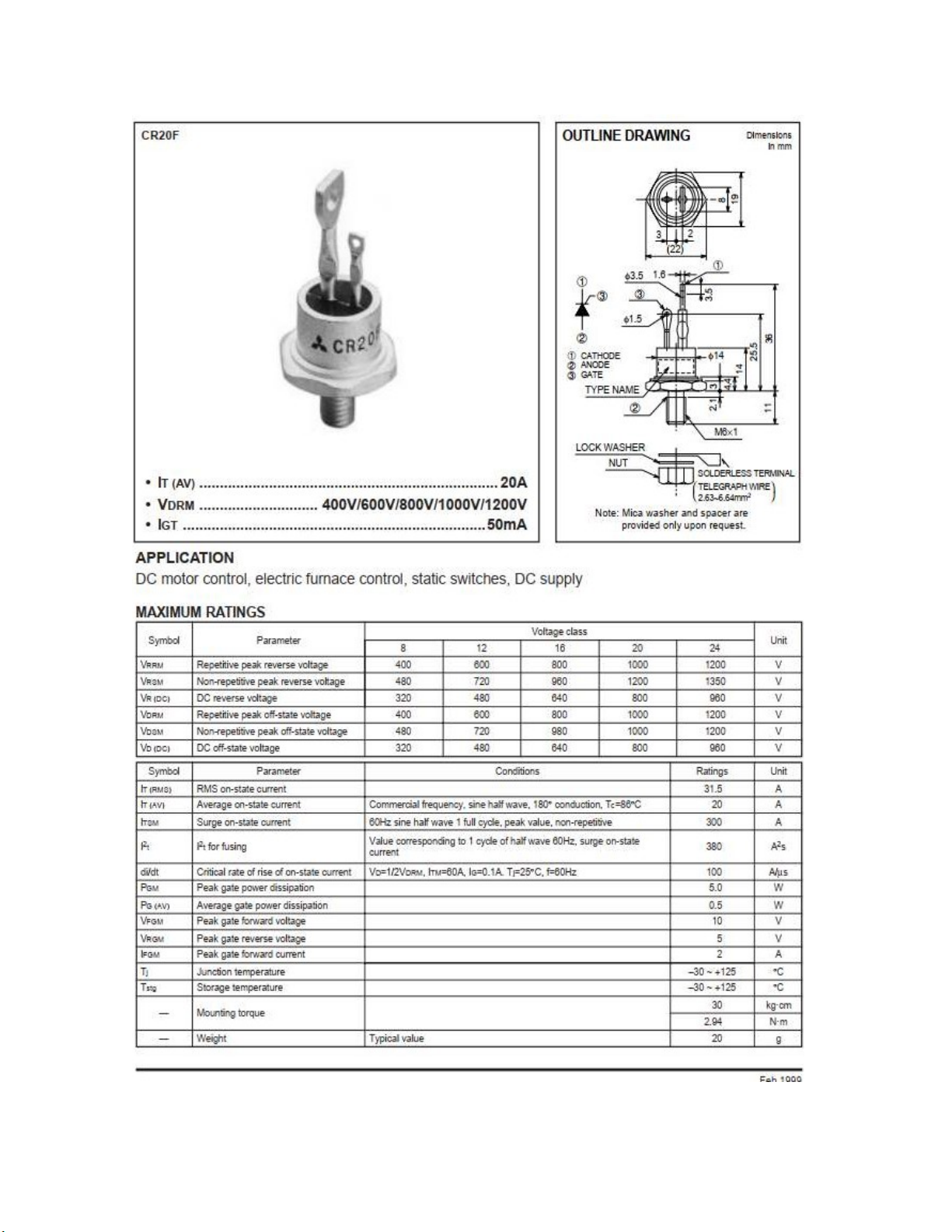
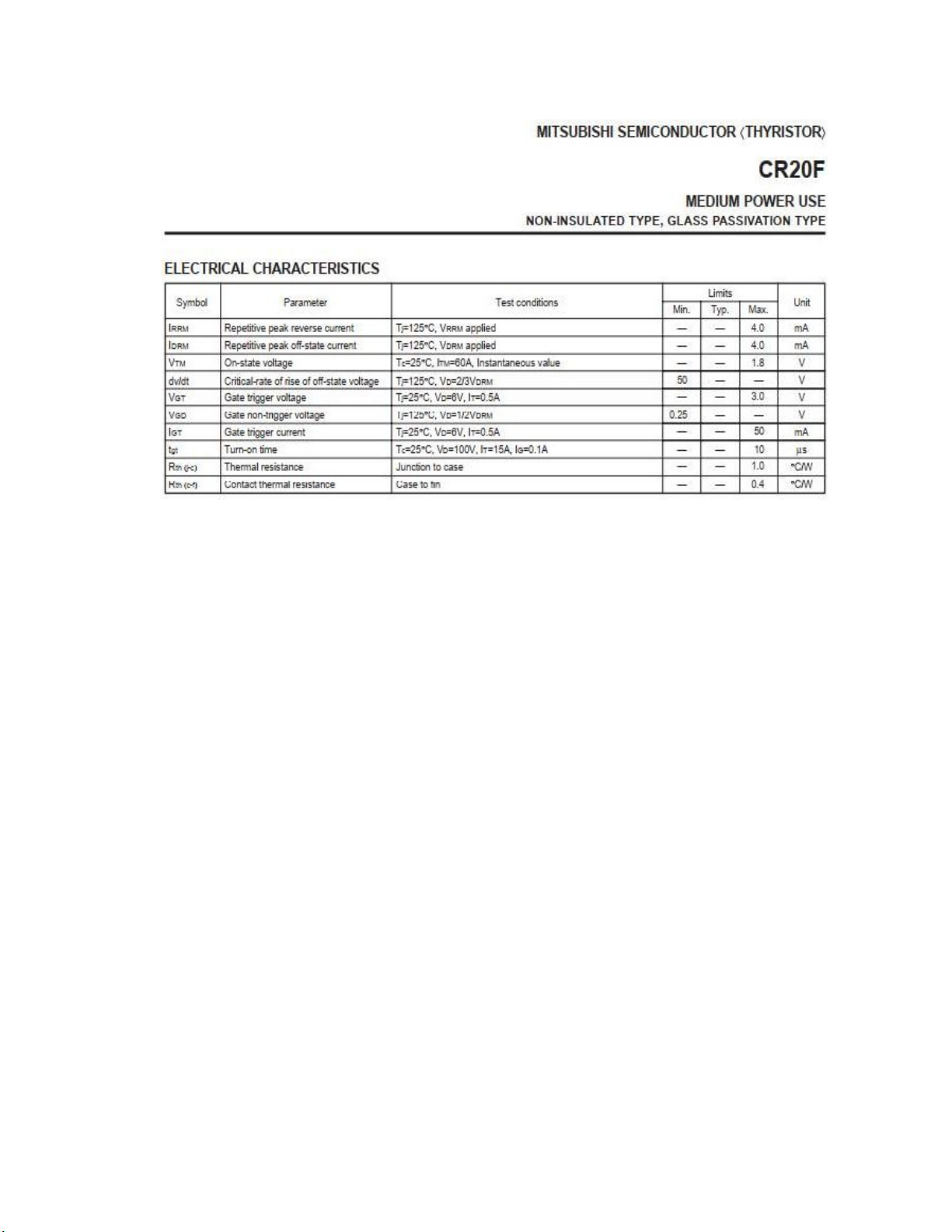
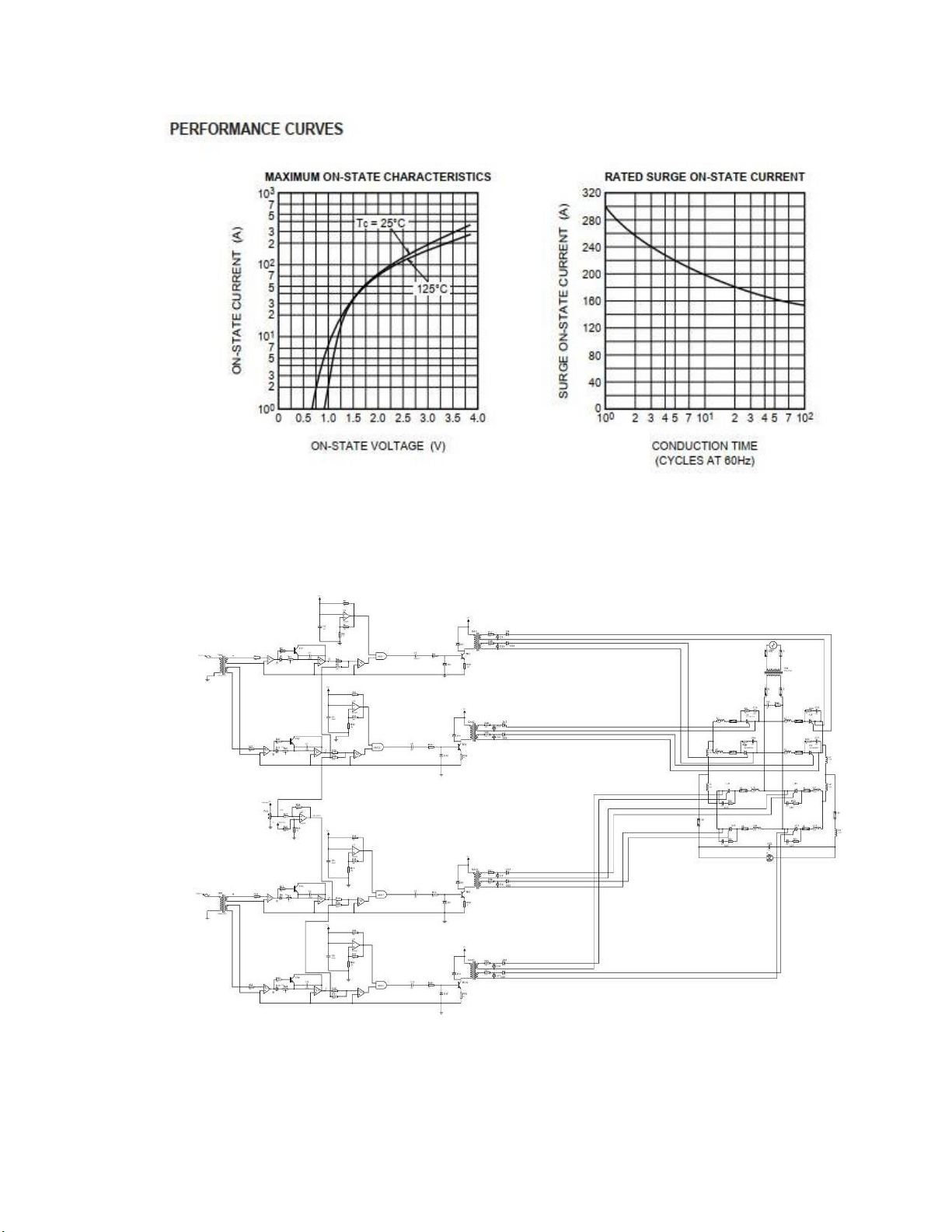
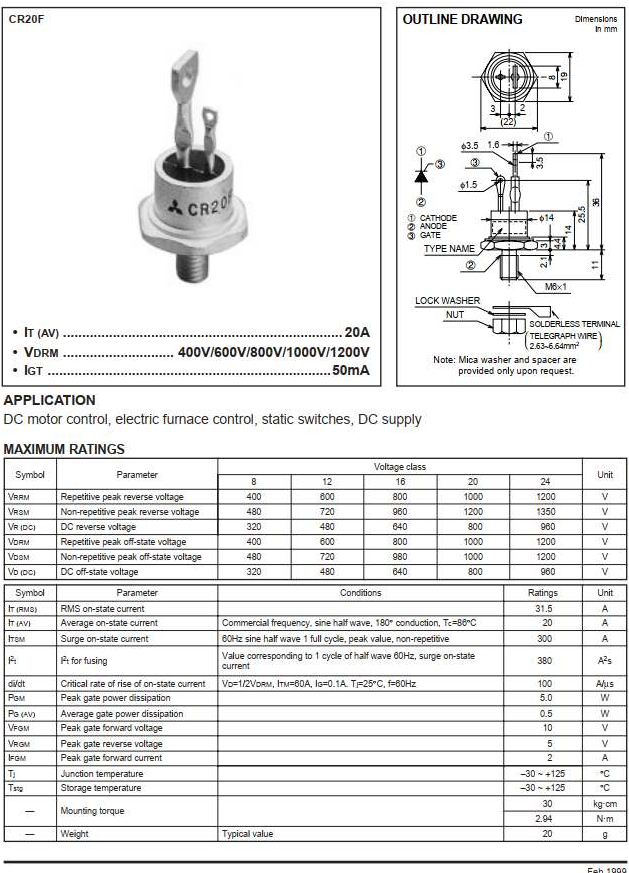
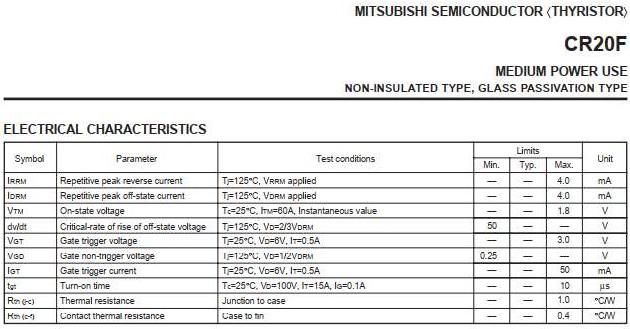
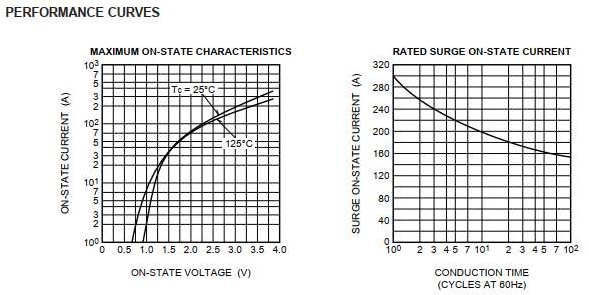
Dựa vào hai thông số và ta chọn van: CR20F12(Phụ lục 2- Trang 659) với các thông số:
- Điện áp ngược van:
- Dòng điện làm việc cực đại:
- Dòng điện xung điều khiển:
- Điện áp xung điều khiển:
- Độ sụt áp lớn nhất trên thyristor:
- Tốc độ biến thiên điện áp:
- Đỉnh xung dòng điện:
- Nhiệt độ làm việc cho phép:
- Dòng điện rò:
Tính toán máy biến áp chỉnh lưu:
Điện áp chỉnh lưu không tải:
Trong đó:
= là góc dự trữ khi có suy giảm điện áp lưới là sụt áp trên Thyristor
là sụt áp trên dây nối
là sụt áp trên điện trở và điện kháng máy biến áp. Chọn sơ bộ vào khoảng (5-10%)
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 18
Công suất tối đa của tải:
Công suất biểu kiến của MBA:
Với: : Hệ số công suất theo sơ đồ cầu 1 pha (Bảng 8.2 – trang 240)
: Công suất tối đa của tải
Tiết diện sơ bộ trụ:
Với: – hệ số phụ thuộc phương thức làm mát, lấy ; m – số pha của máy biến áp;
f – tần số nguồn xoay chiều, .
Thay số:
Tính toán dây quấn MBA:
Điện áp cuộn dây sơ cấp:
Điện áp cuộn dây thứ cấp:
Số vòng dây của cuộn được tính là:
W: số vòng dây cần tính (vòng) U: điện áp cuộn dây cần tính (V)
B: từ cảm (thường chọn trong khoảng 1,0T ÷ 1,8T). Chọn B = 1 (T)
: tiết diện lõi thép biến áp ( .
f: tần số nguồn xoay chiều (f = 50 Hz)
: công suất biểu kiến của MBA (VA) Số vòng dây cuộn sơ cấp (điện áp ):
Số vòng dây cuộn thứ cấp (điện áp ):
Dòng điện của cuộn dây sơ cấp:
Dòng điện của cuộn dây thứ cấp:
Tính tiết diện dây dẫn:
I: dòng điện chạy qua cuộn dây (A).
J: Mật độ dòng điện trong biến áp (thường chọn 2 ÷ 2,75 ();
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 19
Chọn J = 2,75().
Tiết diện dây quấn cuộn sơ cấp:
Đường kính dây quấn cuộn sơ cấp: (Chọn dây quấn tròn)
Tiết diện dây quấn cuộn thứ cấp:
Đường kính dây quấn cuộn thứ cấp: (Chọn dây quấn tròn)
)
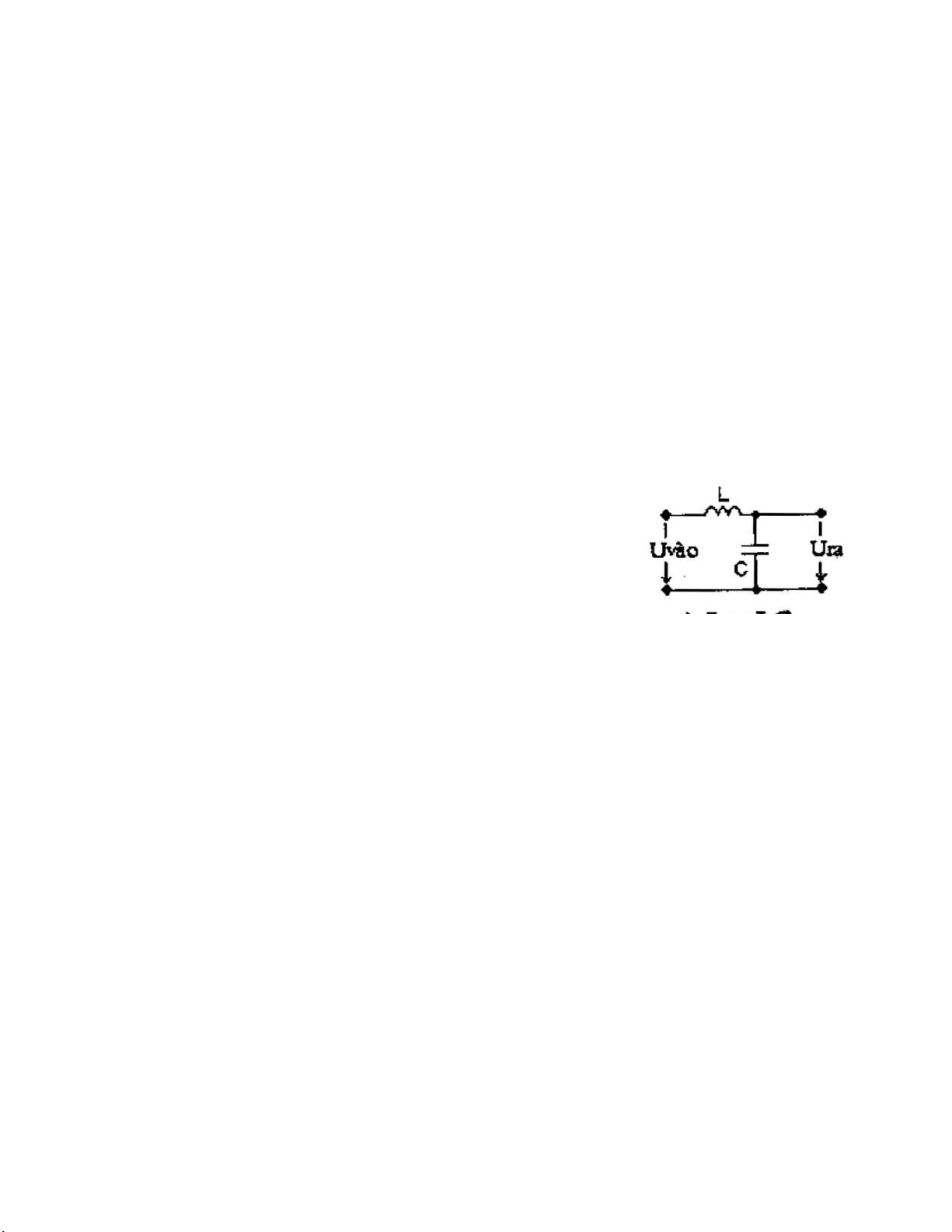
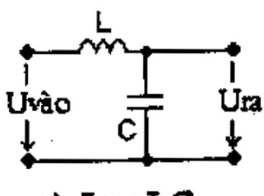
Mục đích của việc tính toán bộ lọc:
Xác định các trị số cần thiết của điện cảm lọc và tụ điện lọc sao cho thỏa mãn hệ số đập mạch cho trước đồng thời hiệu chỉnh để có kích thước vừa phải. Thực tế tụ điện được chế tạo sẵn với các trị số quy chuẩn và chỉ cần chọn trị số phù hợp, còn điện cảm lọc phải tự thiết kế vì không được tạo chuẩn.
Tính toán
Hệ số đập mạch của điện áp chỉnh lưu phụ thuộc vào số xung đập mạch và góc điều khiển α.
Ta luôn có > do đó > 1 và càng lớn hơn một càng tốt nên chọn = 14 L > = (H)
Có: = = = 13,71 Ω; = 2
: số lần đập mạch của điện áp chỉnh lưu trong một chu kì điện áp nguồn xoay
chiều.
ra
: tổng tất cả các điện trở tải, sơ bộ có thể coi bằng Ud/Id
: hệ số san bằng là tỷ lệ nhấp nhô thành phần xoay chiều bậc 1 của đầu vào và đầu
Suy ra = 0,029 H = 29 mH
Hai tham số L và C có quan hệ:
L.C = = 37,5 (µF.H) (*)
Thay = 29 mH vào (*) ta có: = 1,29 µF
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 20
Từ kết quả tính được và bảng phụ lục 7 ta chọn C = 1 µF
Suy ra L = 37,5 m H
Kết luận:
- Chọn van: CR20F12(Phụ lục 2- Trang 659) với các thông số:
- Điện áp ngược van:
- Dòng điện làm việc cực đại:
- Dòng điện xung điều khiển:
- Điện áp xung điều khiển:
- Độ sụt áp lớn nhất trên thyristor:
- Tốc độ biến thiên điện áp:
- Đỉnh xung dòng điện:
- Nhiệt độ làm việc cho phép:
- Dòng điện rò:
- Chọn bộ lọc LC có: C = 1 µF; L = 37,5 mH
- Chọn máy biến áp với các thông số:
, , , ,, , , ,
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 21
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 22
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 23
CHƯƠNG 4: THIẾT KẾ CÁC PHẦN TỬ MẠCH ĐIỀU KHIỂN
Giới thiệu chung
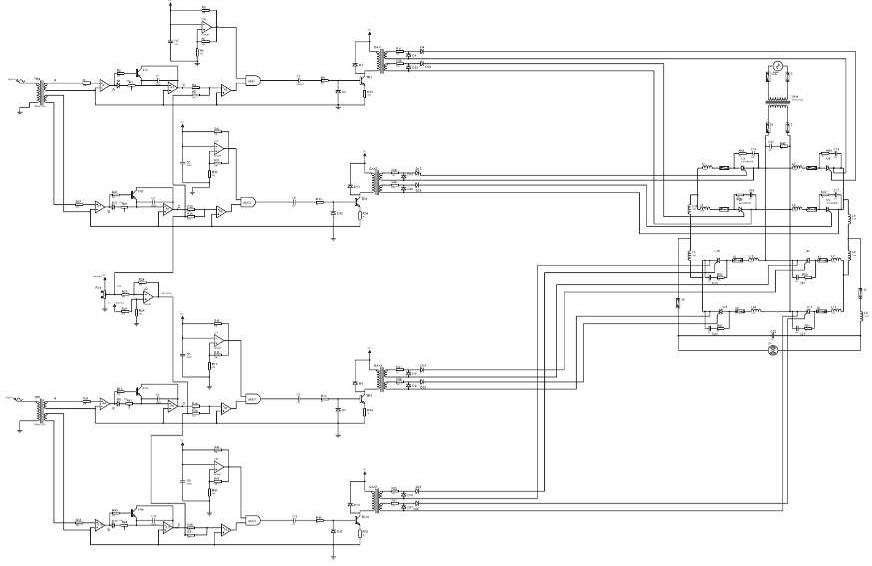
Hình 4. 1 Bản vẽ tổng quát mạch công suất và mạch điều khiển
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 24
Vai trò của mạch điều khiển:
Mạch điều khiển là khâu rất quan trọng trong bộ biến đổi thyristor (tạo ra các xung vào ở những thời điểm mong muốn để mở các van động lực của bộ chỉnh lưu thyristor).
Chính vì vậy nó đóng vai trò chủ đạo trong việc quyết định chất lượng và độ tin cậy của bộ biến đổi.
Yêu cầu đối với mạch điều khiển:
- Yêu cầu về độ lớn và độ rộng xung điều khiển (với độ rộng xung điều khiển)
- Yêu cầu về độ dốc của trường trước xung (càng cao thì việc mở càng tốt, thông thường)
- Yêu cầu về sự đối xứng của xung trong các kênh điều khiển
- Yêu cầu về độ tin cậy:
+ Thyristor không tự mở khi dòng rò tăng, nên điện trở kênh điều khiển phải nhỏ
+ Xung điều khiển ít phụ thuộc vào dao động nhiệt độ, dao động điện áp nguồn
+ Tránh hiện tượng mở nhầm van, cần khử được nhiễu cảm ứng
- Yêu cầu về lắp ráp vận hành:
+ Dễ dàng thay thế và lắp ráp, vận hành
+ Khả năng điều chỉnh thiết bị cao, mỗi khối điều chỉnh có thể làm việc độc lập
Cấu trúc mạch điều khiển dùng thyristor:
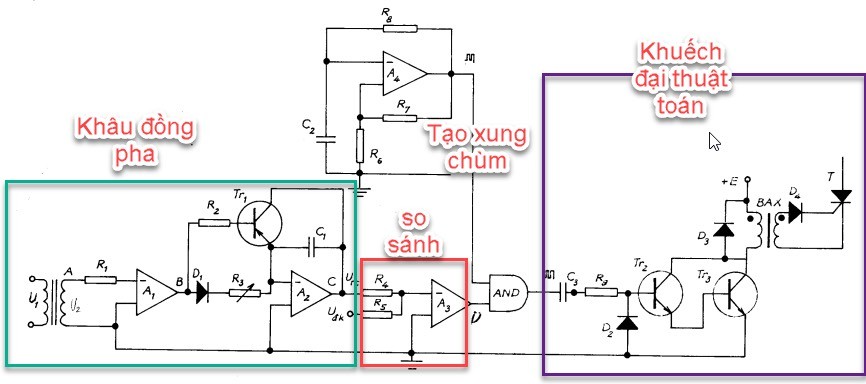
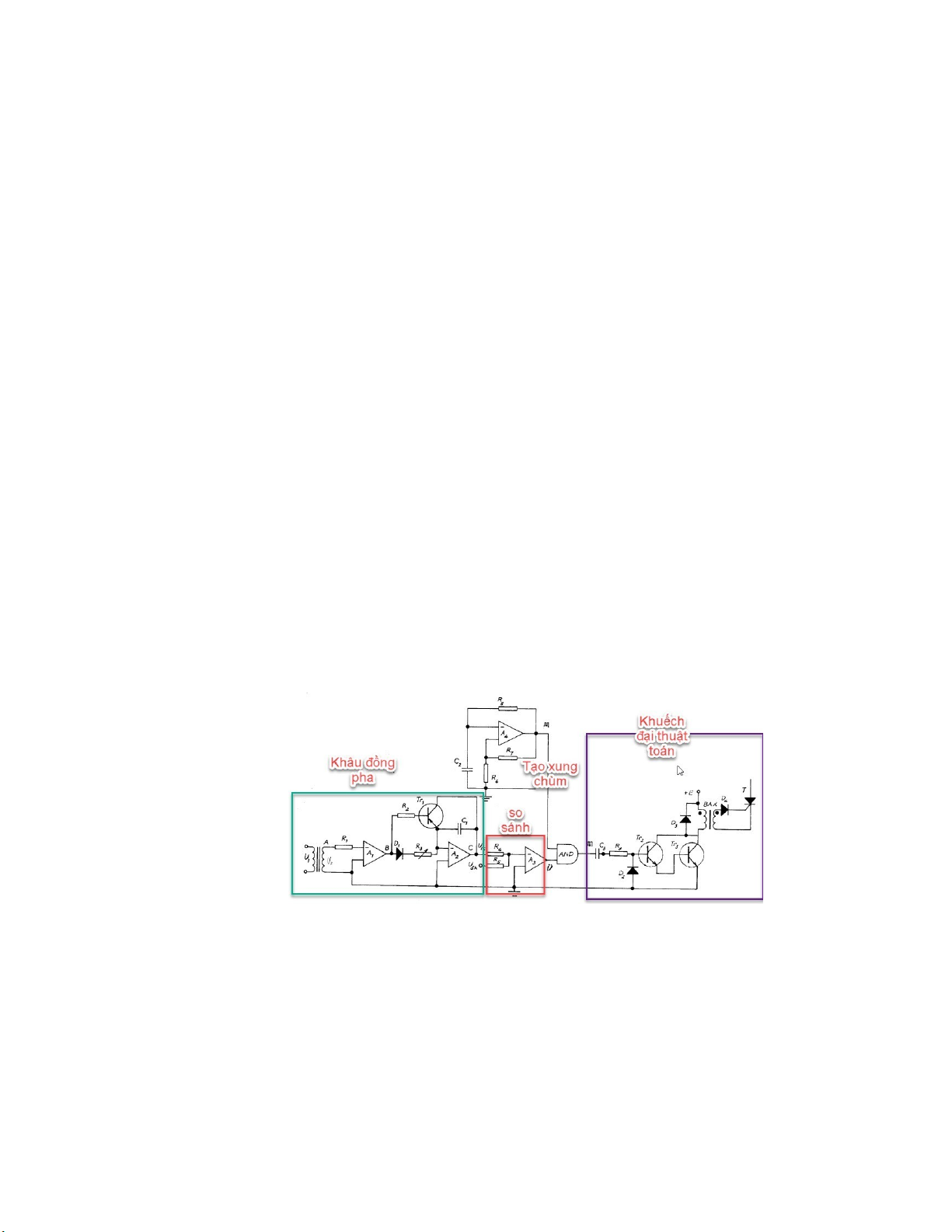
Hình 4. 2 Sơ đồ mạch điều khiển thyristor
- Mạch điều khiển bao gồm các khâu:
+ Khâu đồng bộ: có nhiệm vụ tạo ra điện áp tựa đồng pha với điện áp lưới, cho phép xác định được góc điều khiển α.
+ Khâu so sánh: thực hiện nhiệm vụ so sánh điện áp tựa với điện áp điều khiển để phát động tạo xung có độ rộng thích hợp điều khiển với van.
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 25
+ Khâu tạo xung chùm: vì xung dương sau khối so sánh là một xung vuông có độ rộng kéo dài từ khi xuất hiện cho đến hết nửa chu kì đang xét của điện áp chỉnh lưu, xung này chưa thích hợp để mở thyristor. Do vậy khâu tạo xung này có nhiệm vụ: chế biến xung ra hình dạng thích hợp cho việc mở thyristor; khuếch đại đủ công suất mở thyristor; chia xung cấp cho các thyristor.
+ Khâu khuếch đại thuật toán: có nhiệm vụ khuếch đại để đảm bảo về độ lớn của xung, công suất xung điều khiển, cách ly mạch lực với mạch điều khiển.
Nguyên tắc điều khiển:
- Có 2 hệ điều khiển chỉnh lưu cơ bản là hệ đồng bộ và hệ không đồng bộ.
Hệ đồng bộ: trong hệ đồng bộ góc mở α luôn được xác định, xuất phát từ một thời điểm cố định của điện áp mạch lực. Vì vậy trong mạch điều khiển phải có một khâu thực hiện nhiệm vụ này gọi là khâu đồng bộ hay đồng pha để để bảo mạch điều khiển hoạt động theo nhịp của mạch lực.
- Hệ điều khiển đồng bộ có thể được điều khiển thông qua 2 nguyên tắc:
+ Nguyên tắc điều khiển thẳng đứng across
+ Nguyên tắc điều khiển thẳng đứng tuyến tính
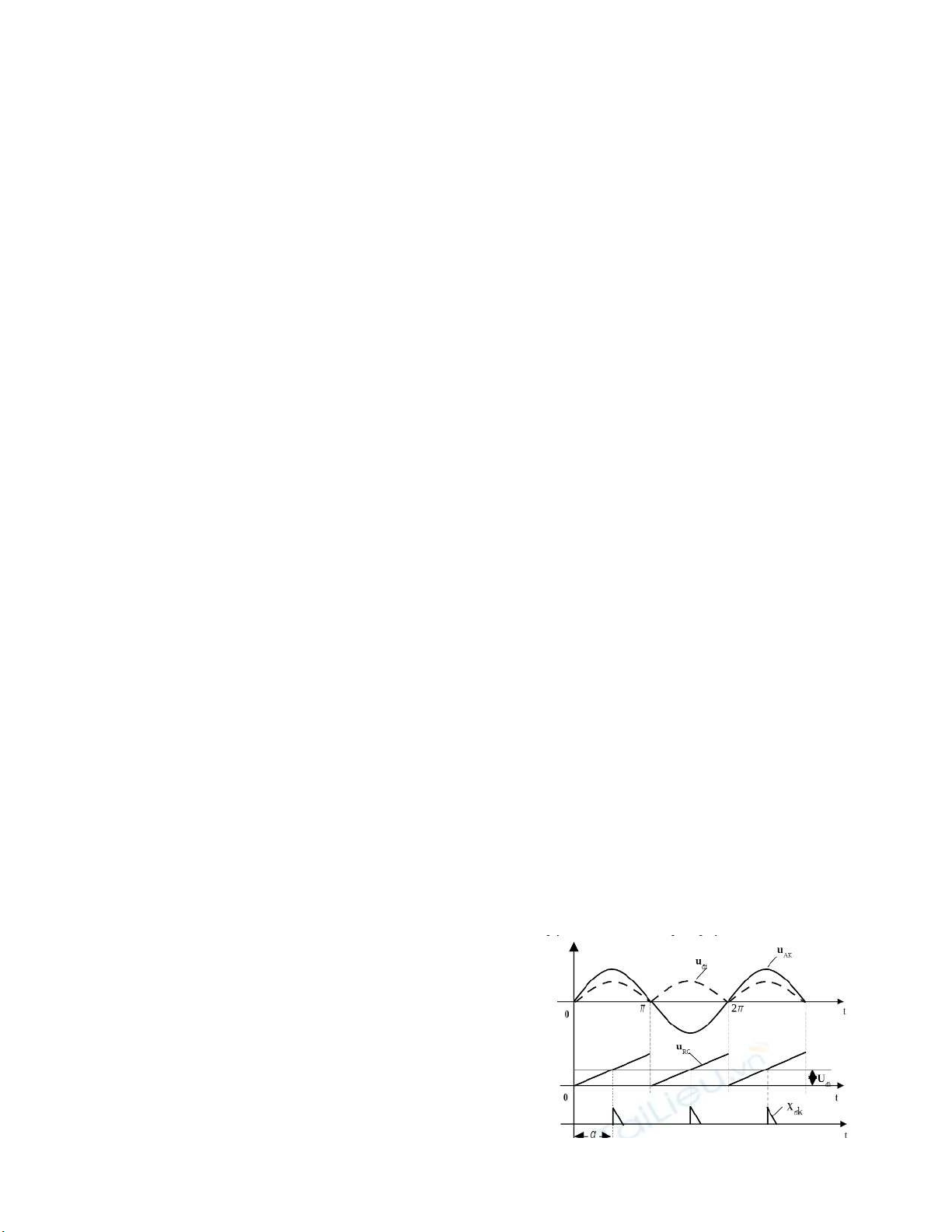
Nguyên tắc điều khiển thẳng đứng tuyến tính:
Nguyên lí hoạt động:
+ Dùng 2 điện áp: ,
- Điện áp răng cưa () có dạng tuyến tính được đồng bộ từ lưới điện, và thông thường thời điểm tạo điện áp răng cưa trùng với thời điểm chuyển mạch tự nhiên.
- Điện áp điều khiển () là điện áp 1 chiều có thể điều chỉnh được biên độ.
+ Điện áp răng cưa và điện áp điều khiển được đưa vào bộ so sánh, khi:
= sẽ có xung điều khiển mở thông thyristor.
+ Bằng cách thay đổi điện áp điều khiển ta có thể điều chỉnh được thời điểm phát xung điều khiển mở thyristor (tức là điều khiển góc mở α (α = π) để xác định )
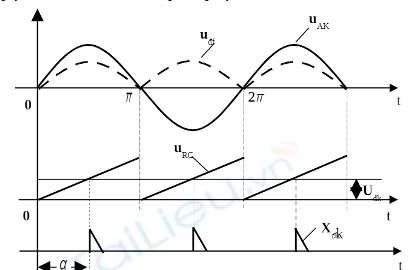 • = khi α = π
• = khi α = π
• = 0 khi α = 0
+ Thường chọn: = = 10v
Nhận xét: Mạch đáp ứng được yêu cầu cấp xung cho 2 thyristor của mạch chỉnh lưu
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 26
điều khiển hoàn toàn. Do vậy ta xây dựng mạch điều khiển trên nguyên tắc: “điều khiển thẳng đứng tuyến tính”.
tính
Nguyên lí hoạt động từng khâu
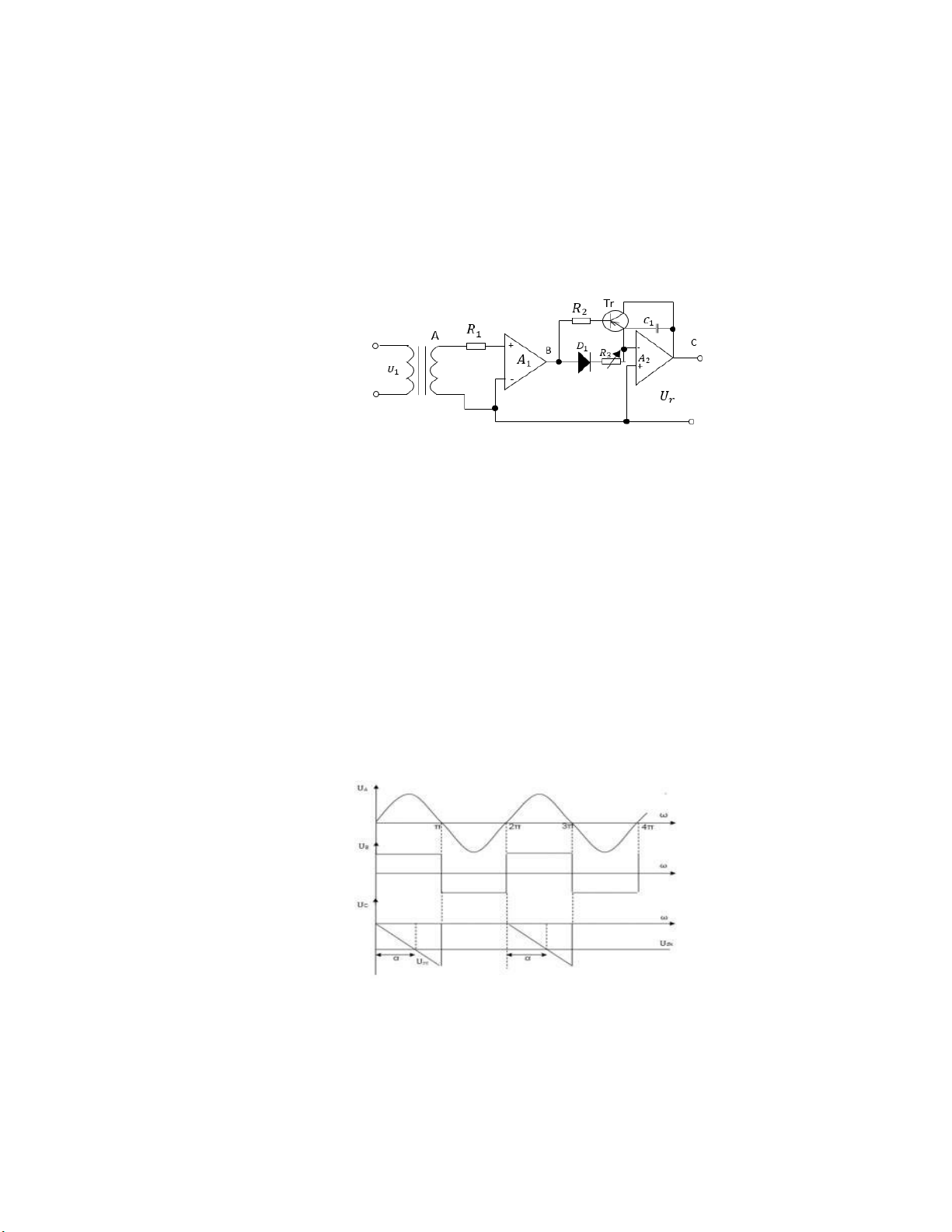
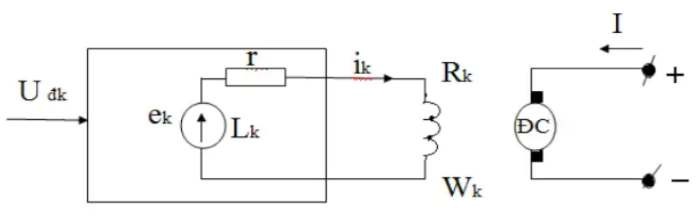
Khâu đồng bộ
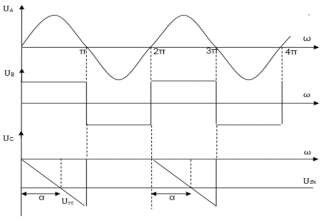
Hình 4. 3 Nguyên tắc điều khiển thẳng đứng tuyến
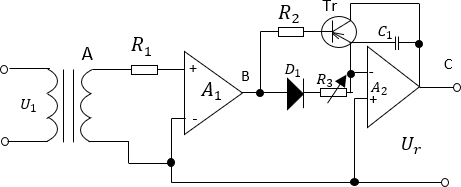
Nguyên lý hoạt động: Tại OPAMP :
Trong nửa chu kỳ dương: Trong nửa chu kỳ âm: Tại OPAMP :
Hình 4. 4 Sơ đồ khâu mạch đồng pha
Khi thì Tr khoá mạch gồm: biến trở , tụ và
OPAMP lúc đó ta được mạch tích phân với là điện áp đồng bộ
Khi thì Tr mở diode khoá. Khi Transistor mở thì vòng mạch gồm Tr và tụ có tác dụng triệt tiêu phần âm của nên .
Khâu so sánh
- Để so sánh các tín hiệu tương tự, có thể dùng Transistor hoặc khuếch đại thuật toán (OPAMP).
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 27
Khuếch đại thuật toán có các ưu điểm sau:
+ Điện trở vào vô cùng lớn: Rv = ∞ (thực tế Rv = 106 đến 109Ω) nên không gây ảnh hưởng đến điện áp đưa vào so sánh, nó có thể tách biệt hoàn toàn chúng để không gây tác động sang nhau.
 + Tầng vào của Opamp thường là loại khuếch đại vi sai, mặt khác có nhiều tầng nên hệ số khuếch đại rất lớn. Hệ số khuếch đại k = ∞ (thực tế k = 106). Vì thế độ chính xác so sánh rất cao, độ trễ không quá vài micro giây. Điện trở ra Rr = 0 (thực tế Rr = 0 đến 200Ω).
+ Tầng vào của Opamp thường là loại khuếch đại vi sai, mặt khác có nhiều tầng nên hệ số khuếch đại rất lớn. Hệ số khuếch đại k = ∞ (thực tế k = 106). Vì thế độ chính xác so sánh rất cao, độ trễ không quá vài micro giây. Điện trở ra Rr = 0 (thực tế Rr = 0 đến 200Ω).
+ Thời gian chuyển từ - Ubh đến +Ubh bằng 0 (thực tế là vô cùng nhỏ).
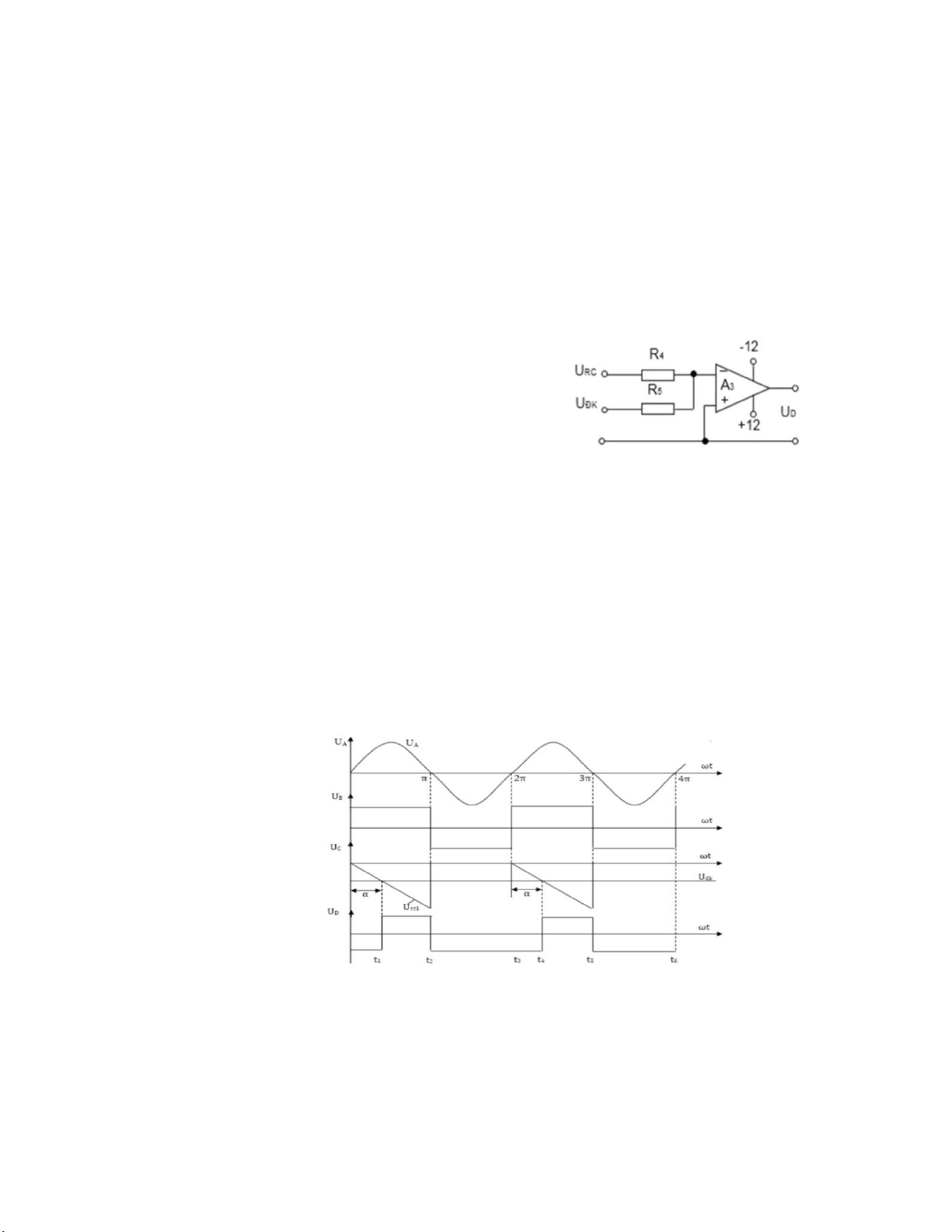
Hình 4. 6 sơ đồ khâu so sánh dùng opamp
- Nguyên lý hoạt động:
Tại opamp ta có: () = + ; () = 0 Khi + > 0 () > () => = - Khi + < 0 () < () => = +
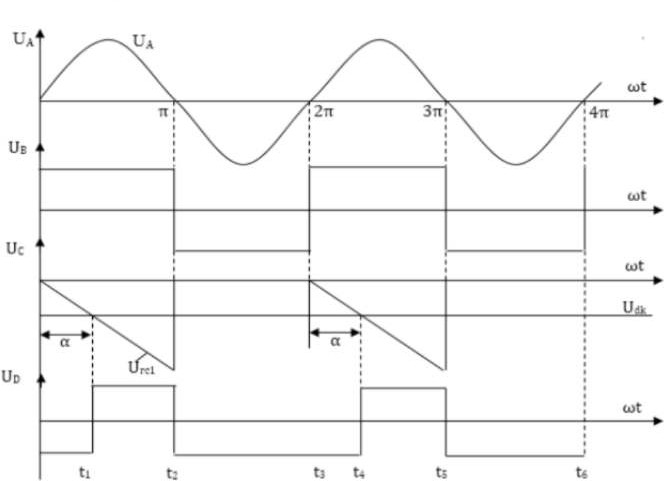
Hình 4. 7 Sơ đồ dạng sóng của khâu so sánh
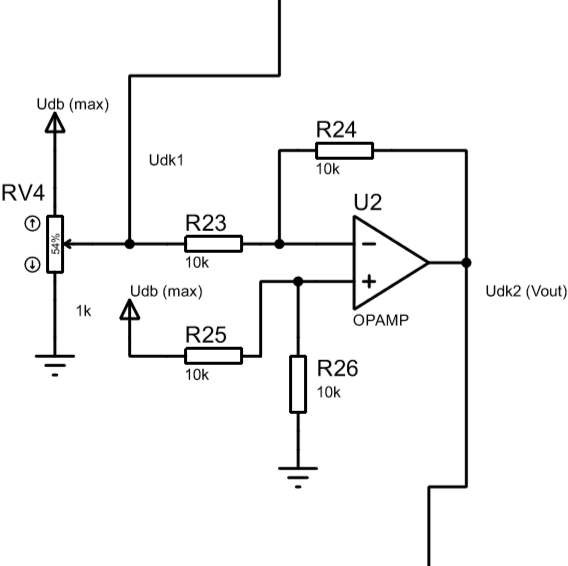
+ Vì ta chọn phương pháp điều khiển chung với nên để đáp ứng được điều kiện này ta sẽ tác động vào của hai khâu so sánh để .
Để tạo ra hai tín hiệu ta sử dụng mạch cộng kết hợp với biến trở
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 28
Vì tính chất của opamp nên ta có Vì không có dòng đi qua đầu của
opamp nên dòng sẽ đi qua và , áp dụng cầu
chia điện áp ta có:
Dòng không đi vào đầu – của opamp nên dòng đi qua bằng dòng đi qua
Khâu tạo xung chùm:
 Để giảm công suất cho khâu khuếch đại và tăng số lượng xung kích mở nhằm đảm bảo thyristor có thể mở một cách chắc chắn ta sử dụng khâu phát xung chùm cho các thyristor. Khâu phát xung chùm dựa vào nguyên tắc trước khi đưa tín hiệu đến khâu khuếch đại ta chèn thêm một cổng AND để nhận tín hiệu đầu vào từ bộ phát xung và khâu so sánh như hình vẽ, khi cả hai khâu đều có tín hiệu thì mới đưa tín hiệu đến khâu khuếch đại.
Để giảm công suất cho khâu khuếch đại và tăng số lượng xung kích mở nhằm đảm bảo thyristor có thể mở một cách chắc chắn ta sử dụng khâu phát xung chùm cho các thyristor. Khâu phát xung chùm dựa vào nguyên tắc trước khi đưa tín hiệu đến khâu khuếch đại ta chèn thêm một cổng AND để nhận tín hiệu đầu vào từ bộ phát xung và khâu so sánh như hình vẽ, khi cả hai khâu đều có tín hiệu thì mới đưa tín hiệu đến khâu khuếch đại.
Hình 4. 9 Sơ đồ phối hợp tạo xung chùm
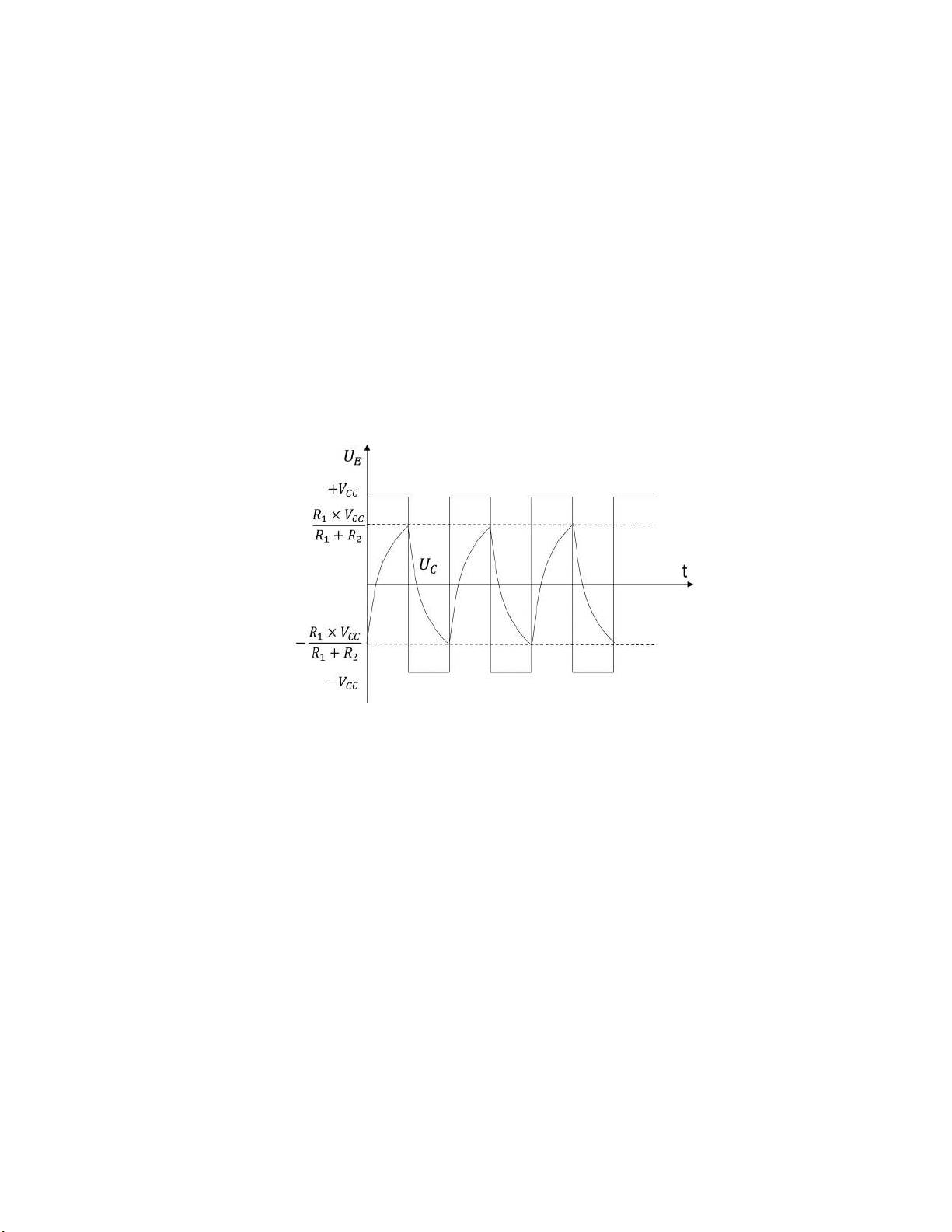
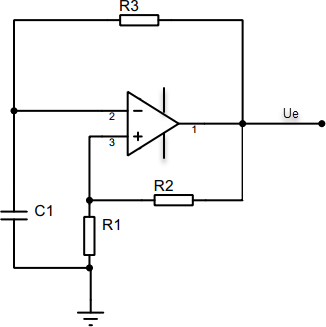
Ở đây trong khâu tạo xung chùm ta dùng sơ đồ đa hài bằng khuếch đại thuật toán.
Hình 4. 10 Sơ đồ phối hợp tạo xung chùm
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 29
Sơ đồ đa hài bằng khuếch đại thuật toán sử dụng mạch khuếch đại điện áp vòng hở (Open Loop) nên vùng khuếch đại tuyến tính chỉ nằm trong một khoảng rất nhỏ. Ta có thể bỏ qua vùng này và xem như tính hiệu ở ngõ ra chỉ tồn tại ở vùng bão hòa dương ứng với và vùng bão hòa âm ứng với
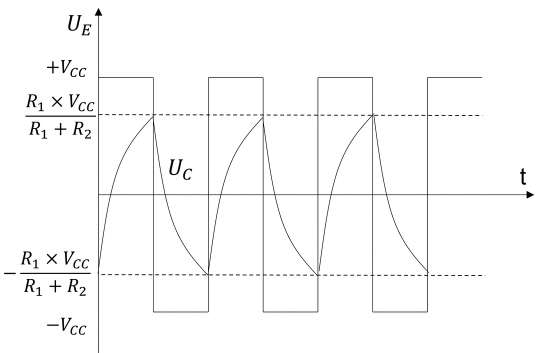 Giả sử lúc đầu tụ chưa tích điện, điện áp ngõ ra , áp dụng nguyên tắc cầu chia điện áp . Lúc này do chênh lệch điện áp nên tụ sẽ được nạp theo chiều từ đầu ra 1 qua và về nối đất. Điện áp tụ sẽ ngày càng tăng cho đến khi điện áp trên tụ , vì điện áp trên tụ cũng là điện áp đầu vào âm(2) nên ,lúc này Op-Amps sẽ chuyển trạng thái thành bão hòa âm điện áp ngõ ra (1) lúc này là . Lúc này do điện áp trên tụ lớn hơn điện áp ngõ ra (1) nên tụ sẽ xả, điện áp trên tụ sẽ giảm. Đến khi điện áp tụ , OpAmps sẽ chuyển trạng thái thành bão hòa dương, tụ sẽ được nạp trở lại. Quy trình nạp và xả liên tục của tụ tạo nên các chùm xung chữ nhật ở đầu ra (1).
Giả sử lúc đầu tụ chưa tích điện, điện áp ngõ ra , áp dụng nguyên tắc cầu chia điện áp . Lúc này do chênh lệch điện áp nên tụ sẽ được nạp theo chiều từ đầu ra 1 qua và về nối đất. Điện áp tụ sẽ ngày càng tăng cho đến khi điện áp trên tụ , vì điện áp trên tụ cũng là điện áp đầu vào âm(2) nên ,lúc này Op-Amps sẽ chuyển trạng thái thành bão hòa âm điện áp ngõ ra (1) lúc này là . Lúc này do điện áp trên tụ lớn hơn điện áp ngõ ra (1) nên tụ sẽ xả, điện áp trên tụ sẽ giảm. Đến khi điện áp tụ , OpAmps sẽ chuyển trạng thái thành bão hòa dương, tụ sẽ được nạp trở lại. Quy trình nạp và xả liên tục của tụ tạo nên các chùm xung chữ nhật ở đầu ra (1).
Khâu khuếch đại
- Xung ra trên vi mạch chưa đủ lớn để có thể mở Thyristor, do đó cần khuếch đại xung có biên độ đủ lớn để có thể kích mở Thyristor.
- Bằng cách khuếch đại xung dễ cách ly giữa mạch điều khiển và mạch lực, truyền xung dạng kim gửi đến Thyristor.
=> Ta chọn cách khuếch đại bằng biến áp xung.
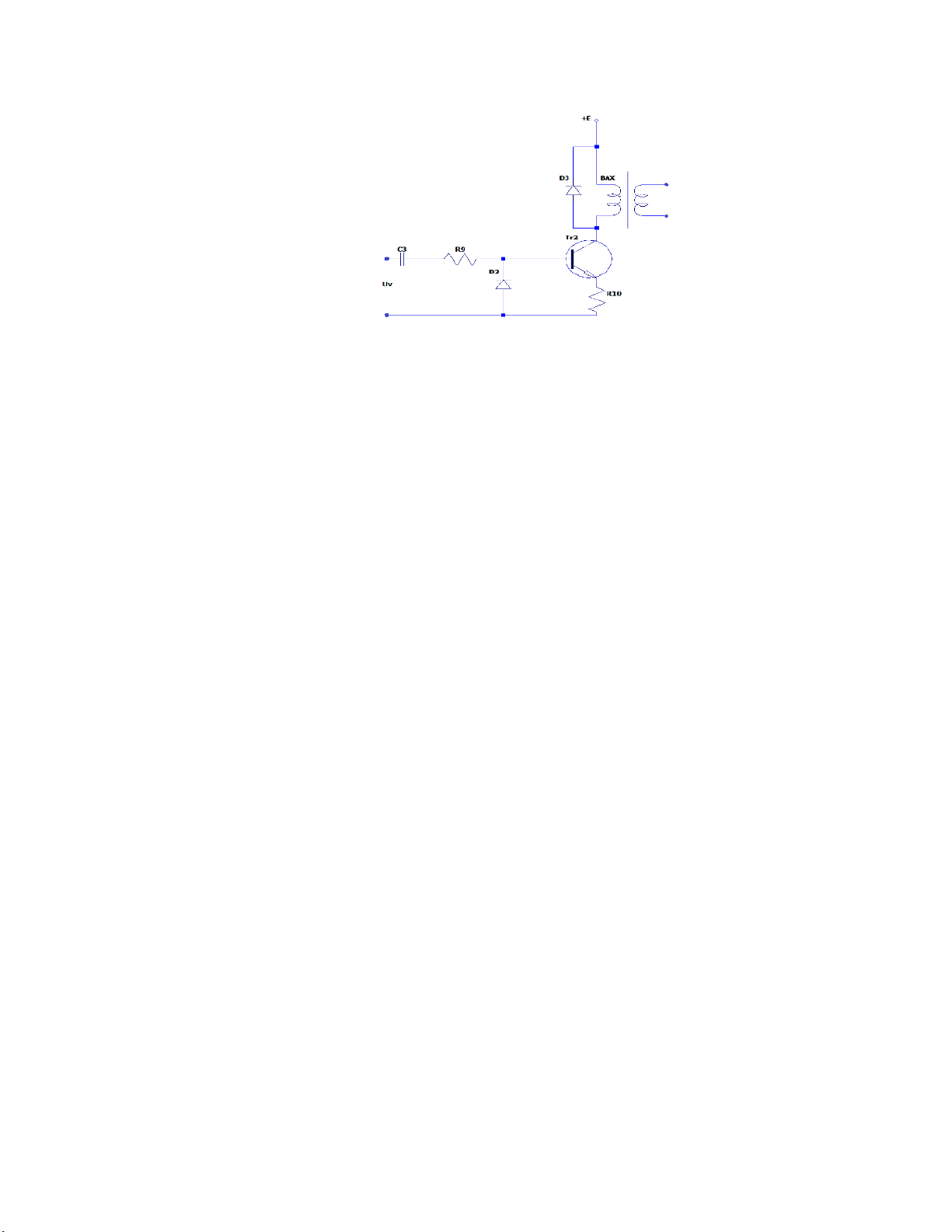
- Khuếch đại xung gồm các linh kiện: transistor, biến áp xung (BAX), diode (D2, D3) và các điện trở phân cực cho tranzito.
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 30
Hoạt động:
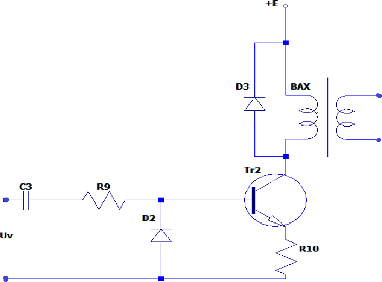
Hình 4. 12 Sơ đồ mạch khâu khuếch đại
Điện áp đầu vào là điện áp dạng xung chùm, có xung dạng hình chữ nhật, khi có xung vào thì sẽ có dòng I chạy qua biến áp xung (BAX). Dòng này sẽ cảm ứng sang thứ cấp của biến áp xung điều khiển. Dùng xung dương vì xung dương lấy năng lượng từ nguồn E, đối với xung âm do năng lượng của cuộn dây điện cảm xả ra, năng lượng này nhỏ.
Để khuếch đại công suất, ta dùng transistor , diode và để bảo vệ và cuộn dây sơ cấp BAX khi khoá đột ngột (nếu không có diode thì năng lượng sinh ra sẽ quá điện áp trên cực C và E, quá điện áp có thể vượt quá ngưỡng cho phép nên có thể phá huỷ transistor). , là điện trở hạn chế dòng phân cực của transistor.
Trong thực tế xung điều khiển chỉ cần có độ rộng bé (cỡ 10 ÷ 200 𝜇𝜇), mà thời gian mở thông các transistor công suất dài (tối đa tới một nửa chu kì 0.01s), làm cho công suất tỏa nhiệt dư của transistor quá lớn và kích thước dây quấn sơ cấp BAX lớn. Để giảm nhỏ công suất tỏa nhiệt và kích thước dây sơ cấp BAX, ta có thể thêm tụ nối tầng .
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 31
CHƯƠNG 5: MẠCH BẢO VỆ VÀ KẾT LUẬN
Giới thiệu chung:
Đối với chỉnh lưu bán dẫn khi tính toán cũng như khi vận hành ta phải đặc biệt lưu ý đến vấn đề bảo vệ qua dòng điện và điện áp.
Vì van bán dẫn có kích thước nhỏ, nhiệt dung bé và nhiệt độ dòng điện qua mặt tiếp giáp PN của diot lớn nên nó rất nhạy cảm với quá tải về dòng. Hằng số thời gian phát nóng của một bản silic trong van công suất lớn chỉ có vài phần trăm giây. Do đó, khâu bảo vệ đòi hỏi phải có tác động nhanh cao.
Mặt khác van bán dẫn cũng nhạy cảm với quá điện áp. Chỉ cần tồn tại một điện áp ngược lớn hơn giá trị cho phép trong khoảng vài µs, mặt tiếp giáp PN đã có thể bị chọc thủng về điện.
Bảo vệ quá nhiệt
Khi làm việc với dòng điện chạy qua, trên các van có sụt áp, do đó có tổn hao công suất P sinh ra nhiệt đốt nóng van bán dẫn.
Cách khắc phục là dùng các cánh tản nhiệt:

Hình 5. 1 Cánh tản nhiệt trong thực tế
Tổn thất công suất trên 1 Thyristor:
P = U × = 1,8 × = 20,49 (W)
Diện tích bề mặt tản nhiệt:
=
Trong đó:
∆U: sụt áp lớn nhất trên Thyristor.
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 32
: dòng điện làm việc của Thyristor.
∆P: tổn hao công suất.
τ: độ chênh lệch nhiệt độ với môi trường.
Chọn nhiệt độ môi trường là 40°C , nhiệt độ làm việc tối đa của Thyristor là 125°C.
Chọn nhiệt độ trên cánh tản nhiệt là 80°C nên τ = 80 − 40 =40°C
: hệ số tỏa nhiệt bằng đối lưu và bức xạ. Chọn = 8 W/.°C
= = 0,064
Chọn loại cánh tản nhiệt 4 cánh kích thước mỗi cánh là 10cm. Tổng diện tích tản nhiệt của cánh là: S = 4*2*10*10 = 800 c = 0,08
Bảo vệ quá dòng điện:
Có 2 loại quá dòng điện là: dòng điện quá tải và dòng điện ngắn mạch
Bảo vệ dòng điện quá tải:
Dùng để chỉ các trường hợp sự cố tạo ra dòng điện quá lớn như ngắn mạch trên tải, trên thanh dẫn thứ cấp của MBA(ngắn mạch ngoài), ngắn mạch các pha đo làm cho thủng van(ngắn mạch trong) do đột biến nghịch lưu.
Bảo vệ dòng điện ngắn mạch:
Thiết bị bảo vệ ngắn mạch cắt nhanh có hiệu quả là cầu chì. Cần lưu ý một số đặc điểm của cầu chì để bảo vệ các Thyristor:
- Cầu chì phải chịu được dùng làm việc định mức của thiết bị.
- Nhiệt lượng của cầu chì phải nhỏ hơn nhiệt lượng của thiết bị cần bảo vệ.
- Khi cầu chì đứt, điện áp phục hồi phải đủ lớn để không làm cho hồ quang cháy lại giữa các cực của cầu chì.
- Sử dụng các loại cầu chì trong đó dây chảy có nhiều khe hẹp nằm trong cát thạch anh để hút nhanh các thành phần bay hơi của hồ quang
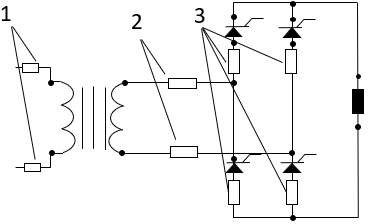
Để bảo vệ điện áp ta chọn cầu chì ở các vị trí sau:
Vị trí 1: Đặt tại ngõ vào MBA. Vị trí 2: Đặt tại ngõ ra MBA.
Vị trí 3: Mắc nối tiếp với mỗi Thyristor
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 33
Hình 5. 2 Sơ đồ bảo vệ các thiết bị biến đổi dùng cầu chì
Thyristor rất nhạy cảm với điện áp quá lớn so với điện áp định mức ta gọi đó là quá trình điện áp, có 2 nguyên nhân gây ra quá điện áp:
- Nguyên nhân nội tại:
Khi khóa thyristor bằng điện áp ngược, các điện tích đổi ngược hành trình tạo dòng điện ngược trong khoảng thời gian rất ngắn (10 – 100µs). Sự biến thiên nhanh chóng của dòng điện sỉnh ra sức điện động cảm ứng rất lớn, trong các điện cảm luôn có, của đường dây nguồn dẫn đến các thyristor.
Quá điện áp này tổng của điện áp làm việc và L như trên.
- Nguyên nhân bên ngoài:
Những nguyên nhân này thường diễn ra ngẫu nhiên khi có sét đánh, khi cầu chì cháy, khi đóng ngắt MBA nguồn.
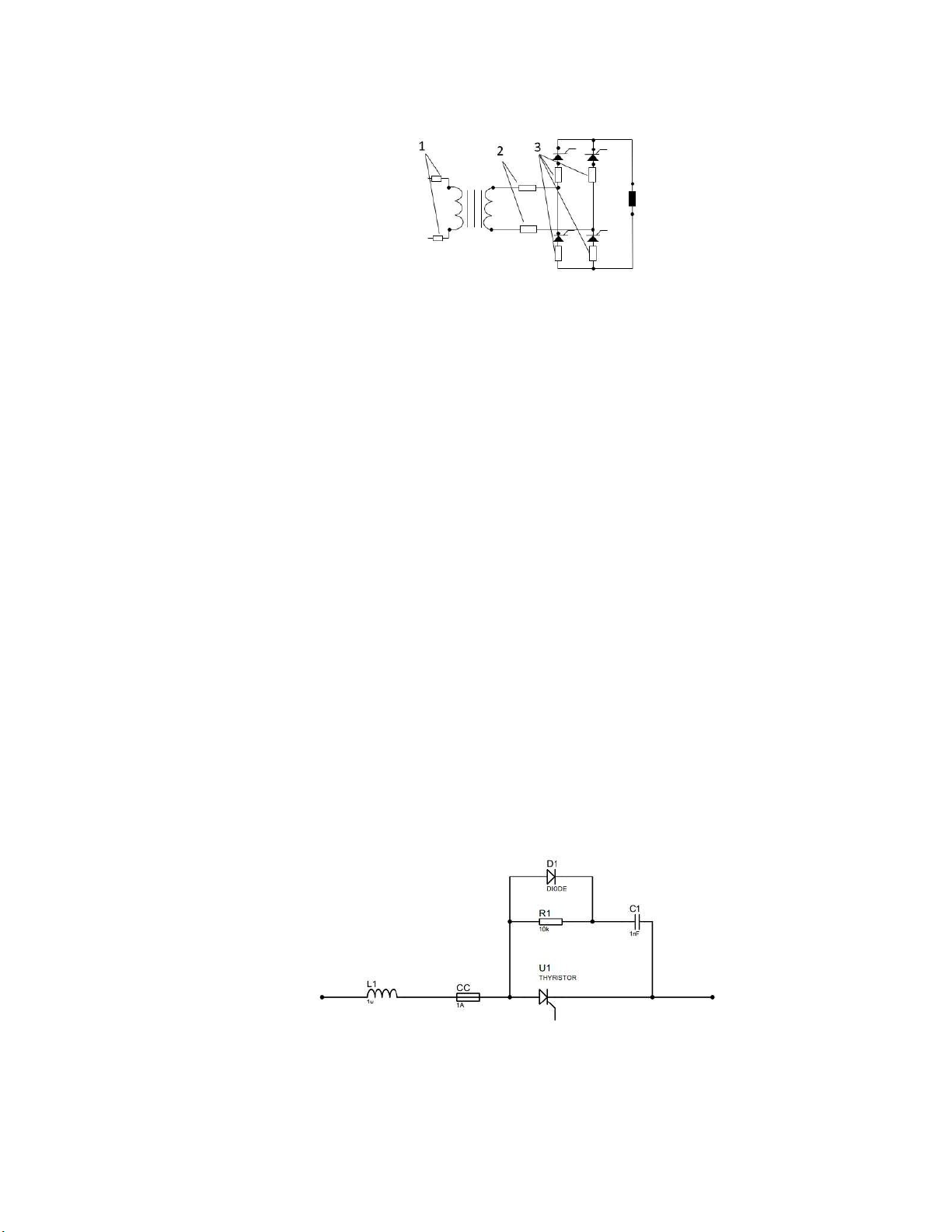
Cắt MBA nguồn tức là cắt dòng điện từ hóa MBA, bấy giờ năng lượng từ trường tích lũy trong lõi sắt từ, chuyển thành năng lượng điện trường trong các tụ điện kí sinh rất nhỏ giữa dây quấn sơ cấp và thứ cấp MBA. Điện áp này có thể lớn gấp 5 lần điện áp làm việc. Để bảo vệ qua điện áp người ta dùng mạch bảo vệ RLC bảo vệ riêng từng thyristor.
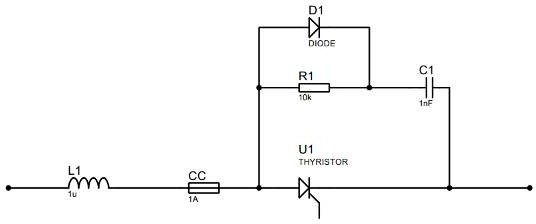
Hình 5. 3 Sơ đồ bảo vệ dùng mạch RLC
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 34
Người ta thường chọn điện áp định mức của thyristor là U > 1,2. Trị số này vẫn còn nhỏ hơn nhiều so với các quá điện áp trên. Các điện áp có tốc độ tăng trưởng lớn. Đạo hàm điện áp sinh ra các dòng điện chảy qua tụ C, đấu giữa anode và cathode của thyristor, i = C. Điện cảm L hạn chế dòng điện chảy này.
Khi kích mở thyristor, tụ điện C sẽ phóng điện qua thyristor, điện trở R hạn chế dòng điện này.
Các linh kiện bảo vệ có thể tính toán bằng công thức, nhưng thực tế người ta ưa dùng các trị số thực nghiệm:
C = 0,01 ÷ 1µF R = 10 ÷ 1000Ω L = 50 ÷100µH
Ta có thể dùng mạch RC để bảo vệ quá áp cho bộ biến đổi:
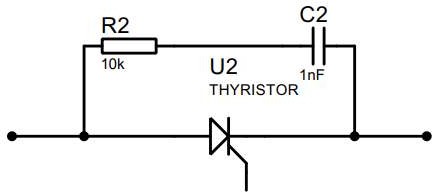

Hình 5. 4 Dùng mạch RC để bảo vệ quá áp
Mạch RC đấu song song với thyristor nhằm bảo vệ quá điện áp do tụ điện tích khi chuyển mạch gây nên.
Mạch RC đấu giữa 2 pha thứ cấp của MBA để bảo vệ điện áp do cắt không tải MBA gây nên.
Thông số RC phụ thuộc vào mức độ của điện áp có thể xảy ra, tốc độ biến thiên của dòng điện chuyển mạch, điện cảm trên đường dây, dòng điện từ hóa MBA.
Việc tính toán thông số R,C đòi hỏi phải tốn nhiều thời gian tìm hiểu tài liệu, mà tài liệu cũng chỉ hướng dẫn phương pháp xác định thông số R,C bằng đồ thị giải tích.
Nhưng do các thông số của bài toán quá nhỏ nên việc xác định theo đồ thị khó chính xác. Vì vậy, nhóm chọn mạch RLC để bảo vệ, với các thông số theo thực nghiệm đã tìm được.
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 35

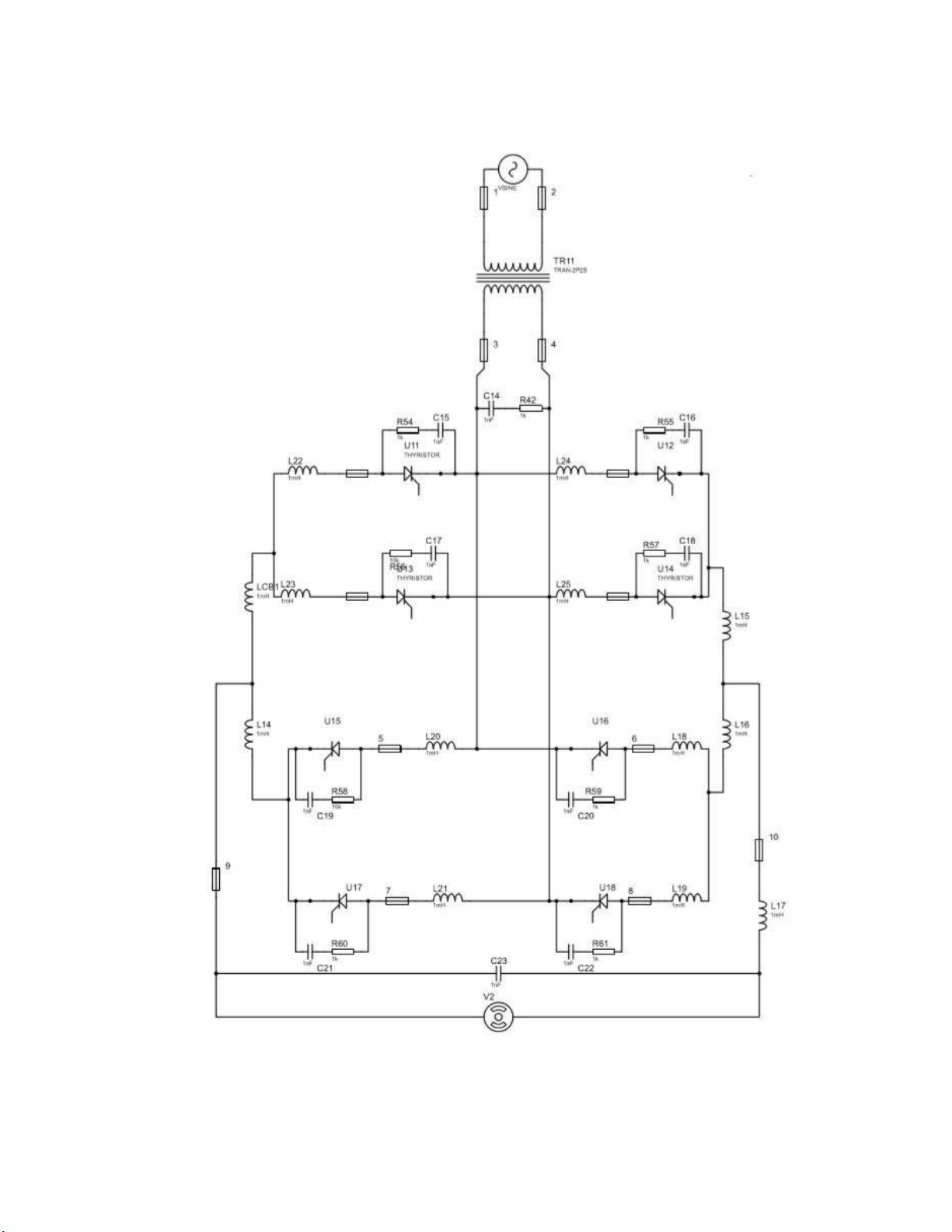
Hình 5. 5 Sơ đồ bảo vệ của mạch động lực
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 36
Nhóm thực hiện: Nhóm 03-18PFIEV2 Hướng dẫn: TS. Giáp Quang Huy 37