Thiết kế và thi công hệ thống tưới cây tự động | Đồ án môn học 1 ngành công nghệ kỹ thuật điện tử viễn thông Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
Để hoàn thành báo cáo đồ án môn học 1 chuyên ngành Công nghệ Kỹ thuật Điện tử - Viễn thông, nhóm xin gửi đến thầy Nguyễn Văn Phúc lời cảm ơn chân thành và sâu sắc nhất vì Thầy đã tận tình hướng dẫn, giúp đỡ và tạo điều kiện thuận lợi nhất cho nhóm trong suốt quá trình thực hiện đồ án. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: công nghệ kỹ thuật điện tử - viễn thông 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:















Preview text:
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP. HỒ CHÍ MINH
KHOA ĐIỆN - ĐIỆN TỬ
ĐỒ ÁN MÔN HỌC 1
NGÀNH CÔNG NGHỆ KỸ THUẬT ĐIỆN TỬ VIỄN THÔNG
THIẾT KẾ VÀ THI CÔNG HỆ THỐNG
TƯỚI CÂY TỰ ĐỘNG
SVTH: VÕ PHƯỚC TIẾN MSSV: 20161381 LÊ XUÂN QUỲNH MSSV: 20161363
GVHD: ThS. NGUYỄN VĂN PHÚC
TP. HỒ CHÍ MINH – 06/2023
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT THÀNH PHỐ HỒ CHÍ MINH KHOA ĐIỆN – ĐIỆN TỬ
BỘ MÔN ĐIỆN TỬ VIỄN THÔNG ĐỒ ÁN MÔN HỌC 1
THIẾT KẾ VÀ THI CÔNG HỆ THỐNG
TƯỚI CÂY TỰ ĐỘNG
Ngành Công Nghệ Kỹ Thuật Điện Tử Viễn Thông Sinh viên: VÕ PHƯỚC TIẾN MSSV: 20161381 LÊ XUÂN QUỲNH MSSV: 20161363
Hướng dẫn: ThS. NGUYỄN VĂN PHÚC TP. HỒ CHÍ MINH - 6/2023
CỘNG HÒA XÃ HỘI CHỦ NGHĨA VIỆT NAM
Độc lập – Tự do – Hạnh phúc ….**.…
TP. Thủ Đức, ngày tháng năm 2023
NHIỆM VỤ ĐỒ ÁN MÔN HỌC 1
Họ và tên sinh viên: Võ Phước Tiến MSSV: 20161381
Lê Xuân Quỳnh MSSV: 20161363
Ngành: Công nghệ kỹ thuật Điện tử viễn thông Lớp: 2016VMVT3
Giảng viên hướng dẫn: Th.S Nguyễn Văn Phúc
Ngày nhận đề tài: 4/ 3 /2023 N
gày nộp đề tài: 17/06/2023
1. Tên đề tài: THIẾT KẾ VÀ THI CÔNG HỆ THỐNG TƯỚI CÂY TỰ ĐỘNG
2. Các số liệu, tài liệu ban đầu:
- Vi điều khiển: PIC 16F877A. - Các loại m odule: Relay 4 kênh.
- Cảm biến: LM35, cảm biến độ ẩm đất, quang trở.
- Thiết bị: Động cơ bơm chìm, phun sương 5V-DC.
- Nguồn: Adapter 12V-DC, mạch giảm áp SY8205. 3. Sản phẩm
- Thiết bị có chức năng chuyển đổi các chế độ hoạt động, sử dụng các cảm biến
hoặc các nút nhấn để điều khiển thiết bị thông qua relay, hiển thị các thông tin
cần thiết lên màn hình LCD.
- Quyển báo cáo đề tài.
CỘNG HÒA XÃ HỘI CHỦ NGHĨA VIỆT NAM
Độc lập – Tự do – Hạnh phúc ….**.…
TP. Thủ Đức, ngày tháng năm 2023
PHIẾU NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN
Họ và tên sinh viên: Võ Phước Tiến MSSV: 20161381
Lê Xuân Quỳnh MSSV: 20161363
Ngành: Công nghệ kỹ thuật Điện tử viễn thông Lớp: 2016VMVT3 Họ và tên G ả
i ng viên hướng dẫn: Th.S Nguyễn Văn Phúc
Tên đề tài: THIẾT KẾ VÀ THI CÔNG HỆ T Ố
H NG TƯỚI CÂY TỰ ĐỘNG NHẬN XÉT
1. Về nội dung đề tài và khối lượng thực hiện:
…………………………………………………………………………………………
………………………………………………………………………………………… 2. Ưu điểm:
…………………………………………………………………………………………
………………………………………………………………………………………… 3. Khuyết điểm:
…………………………………………………………………………………………
…………………………………………………………………………………………
4. Đề nghị cho bảo vệ hay không:
………………………………………………………………………………………… 5. Đánh giá loại:
…………………………………………………………………………………………
6. Điểm: ……………. (Bằng chữ:…………………………)
GIẢNG VIÊN HƯỚNG DẪN LỜI CẢM ƠN
Để hoàn thành báo cáo đồ án môn học 1 chuyên ngành Công nghệ Kỹ th ậ u t Điện tử - V ễ
i n thông, nhóm xin gửi đến Thầy Nguyễn Văn Phúc lời cảm ơn chân thành và
sâu sắc nhất vì Thầy đã tận tình hướng dẫn, giúp đỡ và tạo điều kiện thuận lợi nhất cho
nhóm trong suốt quá trình thực hiện đồ án
Đồng thời nhóm cũng xin gửi lời cảm ơn đến các Anh/Chị khóa trước và bạn bè
đã hỗ trợ, đóng góp ý kiến củng như chia sẽ thêm kinh nghiệm để nhóm hoàn thành tốt đề tài ủ c a mình.
Mặc dù nhóm đã cố gắng hết sức, nhưng do lượng kiến thức còn eo hẹp nên
không tránh khỏi những thiếu sót. Do vậy, nhóm rất mong nhận được sự góp ý quý báu
của Thầy để có thể hoàn thiện và tốt hơn nữa củng như tích lũy thêm kiến thức và kinh
nghiệm để hoàn thành tốt báo cáo đồ án môn học 2 và đặc biệt là báo cáo đồ án tốt nghiệp sau này.
Sau cùng, nhóm xin kính chúc Thầy thật dồi dào sức khỏe, luôn tràn đầy nhiệt
huyết cùng với thành công trong sự nghiệp cao quý. Xin chân thành cảm ơn!
Nhóm thực hiện đề tài
Võ Phước Tiến Lê Xuân Quỳnh i TÓM TẮT
Ngày nay với sự phát triển mạnh mẽ của khoa học và công nghệ, cùng với đó là
các vi điều khiển AVR và vi điều khiển PIC ngày càng thông dụng và hoàn thiện hơn.
Mặt khác nước ta là một nước có nền nông nghiệp lớn mạnh, để bắt kịp xu thế thì những
hệ thống chăm sóc cây trồng, quản lí cây trồng dần trở nên tự động hóa. Để cây trồng
được phát triển tốt và tiết kiệm được chi phí thì những mô hình thông minh đang được
nghiên cứu và ứng dụng rộng rãi trên khắp nước ta.
Nhằm vào những nhu cầu thực tiễn trên và mong muốn vận dụng những kiến
thức mà nhóm đã được học về vi điều khiển PIC, về các thiết bị điện tử nên nhóm đã
quyết định thực hiện đề tài “Thiết kế và thi công hệ thống tưới cây tự động”.
Đề tài “Thiết kế và thi công hệ thống tưới cây tự động” được thực hiện thông qua
PIC 16F877a , các cảm biến nhiệt độ, độ ẩm, ánh sáng hiển thị các thông tin của hệ
thống lên LCD. Đồ án tập trung vào việc phát triển một mô hình hệ thống tự động quản
lý các thiết bị hỗ trợ cho công việc tưới tự động. Hệ thống sử dụng các cảm biến để giám
sát môi trường sống của cây trồng, bao gồm nhiệt độ, ánh sáng và độ ẩm đất. Dữ liệu từ
các cảm biến được thu thập và phân tích để xác định mức độ độ ẩm của đất và nhu cầu
nước của cây trồng. Dựa trên kết quả phân tích, hệ thống sẽ tự động kích hoạt hoặc củng
có thể tùy chỉnh các thiết bị t ới
ư cây, như bơm nước hoặc hệ thống phun sương, để cung
cấp lượng nước phù hợp.
Tóm lại, đồ án "Thiết kế và thi công hệ thống tưới cây tự động" đã thành công
trong việc tìm hiểu một số giải pháp t ới
ư tự động. Hệ thống kết hợp giữa cảm biến và
thiết bị tưới tự động, có thể mang lại sự tiện lợi và hiệu quả trong việc chăm sóc cây trồng. ii MỤC LỤC
DANH MỤC HÌNH ............................................................................................. v
DANH MỤC BẢNG .......................................................................................... vii CÁC TỪ V ẾT I
TẮT ......................................................................................... viii
CHƯƠNG 1 TỔNG QUAN .......................................................................................... 1
1.1 GIỚI THIỆU TÌNH HÌNH NGHIÊN CỨU HIỆN NAY ...................................... 1
1.2 MỤC TIÊU NGHIÊN CỨU .................................................................................. 1
1.3 GIỚI HẠN CỦA ĐỀ TÀI...................................................................................... 2
1.4 PHƯƠNG PHÁP NGHIÊN CỨU ........................................................................ 2
1.5 ĐỐI TƯỢNG VÀ PHẠM VI NGHIÊN CỨU ...................................................... 2
1.6 BỐ CỤC QUYỂN BÁO CÁO .............................................................................. 2
CHƯƠNG 2 CƠ SỞ LÝ THUYẾT .............................................................................. 4
2.1 GIỚI THIỆU VỀ HỆ THỐNG TƯỚI CÂY TỰ ĐỘNG ....................................... 4
2.1.1 Sự khác nhau giữa tưới cây ự
t động và thủ công ........................................... 4
2.1.2 Các vấn đề phát sinh trong việc tưới cây thủ công ........................................ 4
2.1.3 Lợi ích của hệ thống tưới cây ự
t động ........................................................... 4
2.1.4 Vai trò của hệ thống tưới cây ự
t động ............................................................ 5 2.1.5 Nguyên lí hoạt ộ
đ ng của hệ thống tưới cây tự động ...................................... 5
2.2 CÁC PHƯƠNG PHÁP TƯỚI CÂY TỰ ĐỘNG .................................................. 6
2.3 TỔNG QUAN VỀ PHẦN MỀM Ậ
L P TRÌNH PIC C (CCS) ............................... 7
2.3.1 Lý do chọn phần mềm ................................................................................... 7 2.3.2 Khái niệm ề
v phần mềm CCS ........................................................................ 7
2.3.3 Các thao tác để tạo Project mới trong CCS ................................................... 8
2.3.4 Ưu điểm và nhược điểm ............................................................................... 10
2.4 CÁC PHƯƠNG PHÁP CHUYỂN ĐỔI DỮ LIỆU ............................................ 10 iii
2.4.1 Tín hiệu Analog ............................................................................................ 10
2.4.2 Tín hiệu Digital ............................................................................................ 11
2.4.3 Bộ chuyển đổi ADC ..................................................................................... 12
CHƯƠNG 3 THIẾT KẾ VÀ THI CÔNG HỆ THỐNG ........................................... 15
3.1 THIẾT KẾ SƠ ĐỒ KHỐI HỆ THỐNG .............................................................. 15
3.1.1 Chức năng của từng khối ............................................................................. 16
3.1.2 Tính toán và thiết kế mạch ........................................................................... 17
3.2 THI CÔNG HỆ THỐNG ..................................................................................... 35
3.2.1 Thi công board mạch: .................................................................................. 35
3.2.2 Lắp ráp và kiểm tra. ..................................................................................... 36
3.3 LẬP TRÌNH HỆ THỐNG ................................................................................... 37
CHƯƠNG 4 KẾT QUẢ T Ự
H C HIỆN....................................................................... 42
4.1 KẾT QUẢ PHẦN CỨNG ................................................................................... 42
4.2 NHẬN XÉT......................................................................................................... 45
CHƯƠNG 5 KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN ........................................... 46
5.1 KẾT LUẬN ......................................................................................................... 46
5.2 HƯỚNG PHÁT TRIỂN ...................................................................................... 46
TÀI LIỆU THAM KHẢO ........................................................................................... 47
PHỤ LỤC ..................................................................................................................... 48 iv DANH MỤC HÌNH
Hình 2. 1 Logo phần mềm PIC C. ................................................................................... 7
Hình 2. 2 Quá trình lập trình, biên dịch và nạp cho PIC [2]. .......................................... 8
Hình 2. 3 Cửa sổ tạo Files New. ...................................................................................... 9
Hình 2. 4 Cửa sổ Save as. ................................................................................................ 9
Hình 2. 5 Giao diện lập trình trên PIC C. ...................................................................... 10
Hình 2. 6 Dạng sóng của tín hiệu Analog. ..................................................................... 11
Hình 2. 7 Dạng sóng của tín hiệu Digital. ..................................................................... 12
Hình 2. 8 Bộ chuyển đổi ADC. ...................................................................................... 13
Hình 3.1 Sơ đồ khối của hệ thống. ................................................................................ 16
Hình 3.2 PIC 16F877A .................................................................................................. 17
Hình 3.3 Thông số kỹ thuật ủ
c a PIC 16F877A. ............................................................ 19
Hình 3.4 Sơ đồ nguyên lý của khối xử lý trung tâm. .................................................... 20
Hình 3.5 Module Relay 4 kênh. ..................................................................................... 20
Hình 3.6 Sơ đồ nguyên lý kết ố
n i giữa Relay và PIC. .................................................. 21
Hình 3.7 Quang trở. ....................................................................................................... 22
Hình 3.8 Sơ đồ nguyên lý kết ố
n i giữa quang trở và PIC. ............................................ 23
Hình 3.9 Cảm biến LM35DZ. ....................................................................................... 24
Hình 3.10 Sơ đồ nguyên lý kết nối g ữ
i a LM35 và PIC. ................................................ 25
Hình 3.11 Module cảm biến độ ẩm đất. ........................................................................ 27
Hình 3.12 Sơ đồ nguyên lý kết nối giữa cảm biến độ ẩm đất và PIC ........................... 28
Hình 3.13 LCD 20x4. .................................................................................................... 29
Hình 3.14 Sơ đồ nguyên lý kết nối g ữ
i a LCD và PIC. .................................................. 30
Hình 3.15 Công tắc 1 bit và nút nhấn. ........................................................................... 31
Hình 3.16 Sơ đồ nguyên lý kết ố
n i PIC và các nút nhấn, Switch. ................................ 32
Hình 3.17 Mạch giảm áp SY8205. ................................................................................ 34
Hình 3.18 Sơ đồ nguyên lý toàn hệ thống. .................................................................... 34
Hình 3.19 Mặt trước của Board. .................................................................................... 35
Hình 3.20 Mặt sau của Board. ....................................................................................... 36
Hình 3.21 Hình dạng 3D của Board khi mô phỏng. ...................................................... 36 v
Hình 3.22 Mô hình sau khi hoàn thành gia công và lắp ráp linh kiện. .......................... 37
Hình 3.23 Lưu đồ cho chương trình chính. ................................................................... 38
Hình 3.24 Lưu đồ cho chế độ tự động (Auto). .............................................................. 39
Hình 3.25 Lưu đồ cho chế độ tùy chình (Manual). ....................................................... 40
Hình 4.1 Giao diện LCD khi hệ thống ở chế độ Manual. ............................................. 42
Hình 4.2 Giao diện LCD khi nhấn nút A để bật thiết ị
b 1. ............................................ 43
Hình 4.3 Giao diện LCD khi nhấn nút B để bật thiết ị
b 2. ............................................ 43
Hình 4.4 Giao diện LCD khi nhấn nút C để bật thiết ị
b 3. ............................................ 43
Hình 4.5 Giao diện LCD khi nhấn nút để bật 3 thiết bị. ............................................... 44
Hình 4.6 Giao diện LCD khi hệ thống đang ở chế độ Auto. ......................................... 44
Hình 4.7 Giao diện LCD khi 3 thiết ị
b đều bật do vượt ng ỡng ư
cho phép. .................. 45 vi DANH MỤC BẢNG Bảng 3.1 Số l ợng ư
chân sử dụng các linh kiện. ............................................................ 18
Bảng 3.2 Thông số kỹ thuật ủ
c a Module relay. ............................................................. 21
Bảng 3.3 Thông số kỹ thuật ủ
c a quang trở. ................................................................... 23
Bảng 3.4 Thông số kỹ thuật của cảm biến LM35DZ. ................................................... 25
Bảng 3. 5 Thông số kỹ thuật ủ
c a Module cảm biến độ ẩm đất. .................................... 27 Bảng 3.6 Kết ố
n i chân giữa PIC 16F877A và LCD 20x4. ............................................ 30
Bảng 3.7 Thông số điện áp và dòng tiêu thụ của các linh kiện. .................................... 33
Bảng 3.8 Thông số kỹ thuật ạ
m ch giảm áp SY8205. .................................................... 34 vii CÁC TỪ VIẾT TẮT Viết tắt Mô tả PIC
Programmable Intelligent Computer VĐK Vi điều khiển AVR Advanced Virtual RISC RS Register Select RW Read/Write EN Enable LCD Liquid Crystal Display viii CHƯƠNG 1 TỔNG QUAN
1.1 GIỚI THIỆU TÌNH HÌNH NGHIÊN CỨU HIỆN NAY
Hiện nay, nghiên cứu về hệ thống tưới cây tự động đang nhận được sự quan tâm
đáng kể từ cộng đồng nghiên cứu và người làm vườn. Hệ thống tưới cây tự động giúp
giải quyết vấn đề quan trọng về việc cung cấp nước và chăm sóc cây trồng một cách hiệu quả và tiết k ệ i m tài nguyên.
Nghiên cứu trong lĩnh vực này tập trung vào việc phát triển các công nghệ và giải
pháp thông minh để điều khiển và giám sát quá trình tưới cây. Sử dụng các cảm biến đo
độ ẩm, nhiệt độ, độ sáng và dữ liệu thời tiết, hệ thống có thể tự động xác định lượng
nước cần thiết cho cây trồng và điều chỉnh lượng tưới dựa trên nhu cầu thực tế.
Các công nghệ như trí tuệ nhân tạo, học máy và mạng lưới cảm biến không dây
đóng vai trò quan trọng trong việc phân tích và dự đoán nhu cầu tưới cây. Các hệ thống
tưới cây tự động hiện nay cũng có khả năng tương tác với các thiết bị di động thông qua
ứng dụng và gửi thông báo đến người dùng về tình trạng và cảnh báo khi cần thiết.
Nghiên cứu về hệ thống tưới cây tự động tập trung vào việc cải thiện hiệu suất
và tiết kiệm nước, đồng thời tăng năng suất và chất lượng cây trồng. Nó cũng đóng góp
vào bảo vệ môi trường bằng cách giảm lượng nước tiêu thụ không cần thiết và sử dụng
tài nguyên một cách bền vững.
Tóm lại, nghiên cứu về hệ thống tưới cây tự động là một lĩnh vực tiềm năng với
mục tiêu cung cấp các giải pháp thông minh và hiệu quả cho việc quản lý và chăm sóc
cây trồng,tiết kiệm sức lao động và chi phí nhân công, măt khác nhằm để đóng góp vào
sự phát tiển bền vững của ngành nông nghiệp nước nhà.
Xuất phát từ những vấn đề thực tiễn trên nên nhóm đã quyết định thực hiện nghiên
cứu đề tà i“Thiết kế và thi công hệ thống tưới cây tự động ” .
1.2 MỤC TIÊU NGHIÊN CỨU
Nghiên cứu cơ sở lý thuyết về VĐK PIC 16f877a, cảm biến nhiệt độ LM35,
module cảm biến độ ẩm đất, cách kết nối giữa PIC với các cảm biến và module relay để
điều khiển các thiết bị. 1
Xây dựng mô hình phần cứng có các chức năng cơ bản như: công tắc để chuyển
đổi giữa các chế độ hoạt động, dùng relay để điều khiển các thiết bị thông qua dữ liệu
đọc được từ cảm biến hoặc bằng các nút nhấn được thiết ậ l p.
1.3 GIỚI HẠN CỦA ĐỀ TÀI
- Đề tài chỉ tập trung mô phỏng một hệ thống tưới cây tự động nên những thiết bị được
sử dụng trong đề tài chưa thể ứng dụng cho công việc tưới tiêu và chăm sóc cây trồng ngoài thực tế.
- Các giá trị đọc được từ cảm biến có xảy ra sai số do những linh kiện được sử dụng
trong mô hình có giá thành thấp.
- Chưa có nguồn dự phòng nên khi mất đ ệ
i n hệ thống sẽ không thể hoạt động.
1.4 PHƯƠNG PHÁP NGHIÊN CỨU
- Phân tích và nghiên cứu các yếu tố có thể ảnh hướng đến cây trồng trong quá trình trồng trọt ể
đ lựa chọn các linh kiện cảm b ế i n phù hợp với ề đ tài.
- Phân tích và nghiên cứu một số đề tài có liên quan để tìm hiểu các vấn đề phát sinh
có thể xảy ra khi thực hiện đề tài.
- Tìm hiểu về cơ sở dữ liệu, cách thức hoạt động của hệ thống, phân tích và đưa ra phương thức phù hợp.
1.5 ĐỐI TƯỢNG VÀ PHẠM VI NGHIÊN CỨU
- Đối tượng nghiên cứu
- Nghiên cứu nguyên lí hoạt động của phần cứng PIC 16F877A, module relay,
LM35, module cảm biến độ ẩm đất, quang trở, LCD, nút nhấn,…
- Nghiên cứu và tìm hiểu ngôn ngữ lập trình CCS.
- Nghiên cứu các giao thức giao tiếp giữa các module với PIC. - Phạm vi nghiên cứu
- Nghiên cứu dựa trên những mô hình đã có sẵn, tích hợp và ứng dụng những tính năng mới cho đề tài.
1.6 BỐ CỤC QUYỂN BÁO CÁO
Nôi dụng chính của đề tài được trình bày với 5 chương:
- Chương 1: Tổng quan 2
Chương này trình bày tình hình nghiên cứu hiện nay, tính cấp thiết của đề tài,
mục tiêu nghiên cứu, nhiệm vụ nghiên cứu, đối tượng và phạm vi nghiên cứu, phương
pháp nghiên cứu, bố cục đồ án.
- Chương 2: Cơ sở lý thuyết
Chương này trình bày các lý thuyết chính liên quan ế đ n hệ thống.
- Chương 3: Thiết kế và thi công hệ thống
Chương này trình bày cách tính toán thiết kế hệ thống, sơ đồ khối, sơ đồ nguyên
lý lưu đồ giải thuật, viết chương trình hệ thống, thiết ế k sơ đồ mạch in PCB.
- Chương 4: Kết quả thực hiện
Chương này trình bày kết quả thi công phần cứng và kết quả hình ảnh thực tế về
mô hình hệ thống tưới cây tự động, nhận xét về sản phẩm.
- Chương 5: Kết l ậ
u n và hướng phát triển
Chương này trình bày kết l ậ
u n và đề xuất hướng phát triển của đề tài. 3 CHƯƠNG 2 CƠ SỞ LÝ THUYẾT
2.1 GIỚI THIỆU VỀ HỆ T Ố
H NG TƯỚI CÂY TỰ ĐỘNG
2.1.1 Sự khác nhau giữa tưới cây ự
t động và thủ công
Tưới cây tự động là quá trình tưới cây đ
ược thực hiện thông qua sự tự động hóa,
dựa trên các hệ thống cảm b ế i n và thiết ị
b điều khiển. Hệ thống này giám sát các yếu tố
như độ ẩm đất, nhiệt độ, ánh sáng và mưa. Khi các yếu tố này đạt đến ngưỡng được định
trước, hệ thống tự động kích hoạt quá trình tưới cây để cung cấp nước cho cây trồng.
Tưới cây tự động có thể được lập trình để tuân theo lịch trình cụ thể hoặc điều chỉnh
theo yêu cầu thời tiết và nhu cầu nước của cây trồng[1].
Tưới cây thủ công là quá trình tưới cây được thực hiện bằng cách con người can
thiệp trực tiếp. Người trồng cây sẽ sử dụng các công cụ như vòi nước, ống tưới hoặc bình xịt để t ới
ư cây bằng tay. Việc tưới cây thủ công thường dựa trên nhận thức và kinh
nghiệm của người trồng cây để xác định lượng nước và tần suất tưới cây phù hợp. Người
trồng cây có thể tưới cây theo một lịch trình cố định hoặc tùy thuộc vào tình trạng và
nhu cầu nước của cây trồng. 2.1.2 Các vấn ề
đ phát sinh trong việc tưới cây thủ công
- Khả năng nhìn nhận và đáp ứng đúng nhu cầu nước của cây trồng.
- Nguy cơ lãng phí nước do tưới cây quá nhiều hoặc không đúng thời gian.
- Sự không đồng đều trong việc cung cấp nước cho các vùng cây trồng.
- Khó khăn trong việc theo dõi và điều chỉnh quy trình tưới cây.
Vì thế để khắc phục những hạn chế này mà hệ thống tưới ự
t động được nghiên cứu
và phát triển để từng bước thay thế phương pháp tưới t ủ h công.
2.1.3 Lợi ích của hệ thống tưới cây tự động
Tiết kiệm nước: Hệ thống tưới cây tự động có thể được thiết kế để tưới cây theo
nhu cầu thực tế của cây và điều chỉnh lượng nước phù hợp, tránh lãng phí nước so với
việc tưới cây thủ công.
Tiết kiệm thời gian và công sức: Hệ thống tự động loại bỏ việc phải tưới cây thủ
công, giúp tiết kiệm thời gian và công sức của người t ồ r ng cây. 4
Tăng năng suất cây trồng: Hệ thống tưới cây tự động đảm bảo cây nhận đủ lượng
nước cần thiết để phát triển và sinh trưởng tối ưu, từ đó tăng năng suất và chất lượng sản phẩm.
Điều chỉnh linh hoạt: Hệ thống có thể được điều chỉnh dựa trên yêu cầu và điều
kiện thời tiết thay đổi, đảm bảo cung cấp nước phù hợp cho cây trồng trong từng giai đoạn phát triển.
2.1.4 Vai trò của hệ thống tưới cây tự động
- Tự động hóa: Hệ thống tưới cây tự động giúp tự động hóa quy trình tưới cây, từ đó
loại bỏ sự can thiệp của con người và đảm bảo tưới cây hiệu quả.
- Điều chỉnh dựa trên dữ liệu: Hệ thống dựa trên dữ liệu thu thập từ cảm biến để điều
chỉnh lượng nước tưới và tần suất tưới cây phù hợp với yêu cầu của cây trồng và điều kiện môi trường.
- Theo dõi và báo cáo: Hệ thống cung cấp khả năng theo dõi và báo cáo về trạng thái
cây trồng, mức độ ẩm đất, điều kiện thời tiết, từ đó giúp người trồng cây có cái nhìn
tổng quan về tình hình và có thể thực hiện điều chỉnh khi cần thiết.
2.1.5 Nguyên lí hoạt động ủ
c a hệ thống tưới cây tự động
- Bước 1: Cảm biến
Hệ thống tưới cây tự động sử dụng các cảm biến để thu thập thông tin về môi trường
và cây trồng. Các cảm biến như cảm biến độ ẩm đất, cảm biến nhiệt độ và cảm biến ánh
sáng được sử dụng để đo lường các yếu tố quan trọng liên quan đến nhu cầu nước của cây trồng.
- Bước 2: Thiết bị điều khiển
Các dữ liệu từ cảm biến được gửi đến các thiết bị điều khiển, như VĐK (PIC
16F877A), để xử lý thông tin và đưa ra quyết định. Thiết bị điều khiển sẽ phân tích dữ
liệu cảm biến và dựa trên các thông số cài đặt trước đó để xác định lượng nước cần thiết để t ới ư cây.
- Bước 3: Hệ thống cấp nước
Dựa trên quyết định từ thiết bị điều khiển, hệ thống tưới cây tự động sẽ kích hoạt các
thiết bị cấp nước như bơm nước, van tưới và ống tưới để cung cấp nước cho cây trồng.
Nước có thể được cấp từ nguồn nước tự nhiên như giếng khoan, sông hoặc hệ thống lưu trữ nước. 5
- Bước 4: Theo dõi và điều chỉnh
Hệ thống tưới cây tự động thường có khả năng theo dõi trạng thái của cây trồng và
môi trường xung quanh. Nó có thể gửi thông tin về độ ẩm đất, nhiệt độ, cường độ ánh
sáng và các dữ liệu khác về một giao diện người dùng hoặc hệ thống quản lý để người
trồng cây có thể theo dõi và điều chỉnh hệ thống tưới cây khi cần thiết.
Tóm lại, nguyên lý hoạt động của một hệ thống tưới cây tự động dựa trên việc sử
dụng cảm biến, thiết bị điều khiển và quy trình tự động hóa để thu thập thông tin về môi
trường và cây trồng, xử lý dữ liệu và đưa ra quyết định về việc cung cấp nước cho cây
trồng một cách tự động và hiệu quả.
2.2 CÁC PHƯƠNG PHÁP TƯỚI CÂY TỰ ĐỘNG
- Tưới cây dựa trên định thời: Phương pháp này dựa trên lịch trình cố định để tưới
cây. Hệ thống sẽ được lập trình để kích hoạt tưới cây vào các thời điểm cố định trong
ngày hoặc trong khoảng thời gian xác định. Phương pháp này phổ biến trong các hệ thống tưới cây ử
s dụng đèn LED để mô phỏng ánh sáng mặt t ời r trong quá trình tưới cây trong nhà kính.
- Tưới cây dựa trên cảm biến: Phương pháp này sử dụng các cảm biến để đo lường
các yếu tố như độ ẩm đất, nhiệt độ, ánh sáng và mưa. Dữ liệu từ cảm biến sẽ được sử
dụng để đưa ra quyết định về l ợng ư
nước cần tưới cây. Ví dụ, nếu cảm biến độ ẩm
đất cho thấy đất khô, hệ thống sẽ kích hoạt quá trình tưới cây.
- Tưới cây dựa trên dự báo thời tiết: Phương pháp này sử dụng dữ liệu dự báo thời
tiết để điều chỉnh quá trình tưới cây. Dựa trên dự báo mưa, nhiệt độ và độ ẩm, hệ
thống sẽ điều chỉnh lượng nước tưới cây để đáp ứng nhu cầu nước của cây trồng trong tương lai gần.
- Tưới cây dựa trên mô hình tưới cây thông minh: Các mô hình tưới cây thông minh
sử dụng các thuật toán và học máy để tối ưu hóa việc tưới cây. Dựa trên dữ liệu thu
thập được và thông tin về cây trồng, mô hình sẽ đưa ra quyết định tưới cây để đạt
hiệu suất tốt nhất và tiết kiệm nước.
▪ Do còn một số hạn chế nhất định nên đề tài chỉ dừng lại ở
việc nghiên cứu mô phỏng
sử dụng các công cụ tưới dựa trên cảm b ế
i n và điều chỉnh dựa trên nhu cầu cá nhân. 6
2.3 TỔNG QUAN VỀ PHẦN MỀM LẬP TRÌNH PIC C (CCS)
2.3.1 Lý do chọn phần mềm
Sự ra đời của một loại VĐK đi kèm với việc phát triển phần mềm ứng dụng cho
việc lập trình cho con VĐK đó. VĐK chỉ hiểu và làm việc với hai con số 0 và 1. Ban
đầu để việc lập trình cho vi điều khiển là làm việc với dãy các con số 0 và 1. Sau này
khi kiến trúc của VĐK ngày càng phức tạp, số l ợng ư
thanh ghi lệnh nhiều lên, việc lập
trình với dãy các số 0 và 1 không còn phù hợp nữa, đòi hỏi ra đời một ngôn ngữ mới
thay thế. Và ngôn ngữ lập trình Assembly. Ở đây ta không nói nhiều đến Assmebly. Sau
này khi ngôn ngữ C ra đời, nhu cầu dùng ngôn ngữ C để thay cho Assmebly trong việc
mô tả các lệnh lập trình cho VĐK một cách ngắn gọn và dễ hiểu hơn đã dẫn đến sự ra
đời của nhiều chương trình soạn thảo và biên dịch C cho VĐK : Keil C, HT-PIC, MikroC, CCS...
Ở đây nhóm chọn CCS cho quá trình thực hiện đồ án này vì CCS là một công cụ
lập trình C mạnh mẽ và quen thuộc cho VĐK PIC. Những ưu và nhược điểm của CCS
sẽ được đề cập đến trong các phần dưới đây.
2.3.2 Khái niệm về phần ề m m CCS
Hình 2. 1 Logo phần mềm PIC C.
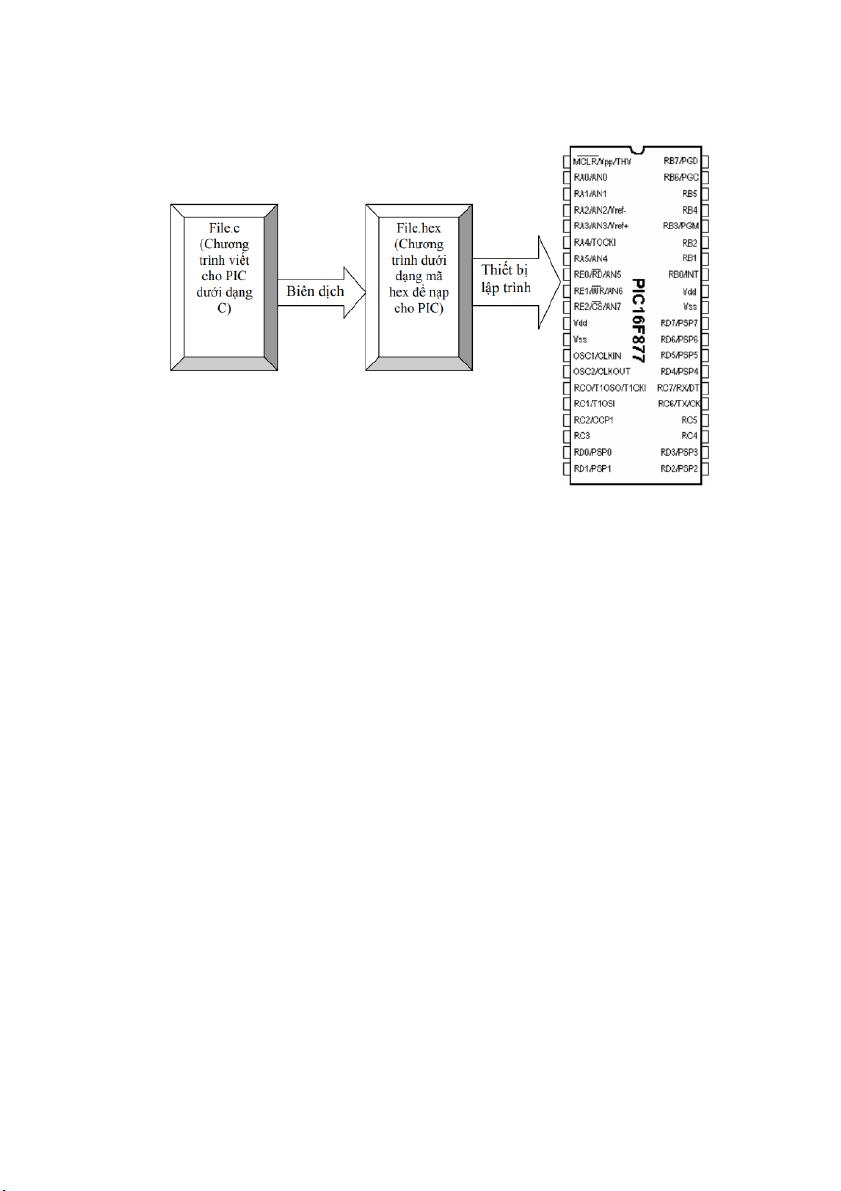
PIC C compiler là ngôn ngữ lập trình cấp cao cho VĐK PIC của hãng Microchip
được viết trên nền C. Chương trình viết trên PIC C tuân thủ theo cấu trúc của ngôn ngữ
lập trình C. Trình biên dịch của PIC C compiler sẽ chuyển chương trình theo chuẩn của
C thành dạng chương trình theo mã Hexa (file.hex) để nạp vào bộ nhớ của PIC[2]. Quá
trình chuyển đổi được minh hoạ như hình 2.2. 7
Hình 2. 2 Quá trình lập trình, biên dịch và nạp cho PIC [2].
- PIC C compiler gồm có 3 phần riêng biệt là PCB, PCM và PCH.
• PCB dùng cho họ MCU với ộ b lệnh 12 bit.
• PCM dùng cho họ MCU với ộ b lệnh 14 bit.
• PCH dùng cho họ MCU với ộ b lệnh 16 và 18 bit.
- Mỗi phần khác nhau trong PIC C compiler chỉ dùng được cho họ MCU tương ứng
mà không cho phép dùng chung (Ví dụ không thể dùng PCM hoặc PCH cho họ MCU
12 bit được mà chỉ có thể dùng PCB cho MCU 12 bit)[2].
2.3.3 Các thao tác để tạo Project mới trong CCS
Để tạo một Project trong CCS có nhiều cách, có thể dùng Project Wizard, Manual
Creat, hay đơn giản là tạo một Files mới và thêm vào đó các khai báo ban đầu cần thiết và “bắt buộc”.
Dưới đây sẽ trình bày cách tạo một Project theo cách đơn giản nhất.
- Trước hết cần khởi động chương trình làm việc với PIC C Compiler. Từ giao diện
chương trình, di chuột c ọ
h n File → New → Source File nhấn nút trái chuột để chọn. 8
Tài liệu liên quan:
-
Sách Mạng truyền thông Công nghiệp | Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
34 17 -

Tổng hợp mạch khuếch đại tín hiệu nhỏ | Môn Công nghệ kỹ thuật điện tử - viễn thông - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
181 91 -

Giải tích mạch Diode | Môn Công nghệ kỹ thuật điện tử - viễn thông - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
143 72 -

Giải bài tập Môn Công nghệ kỹ thuật điện tử - viễn thông | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
101 51 -

Chế tạo animal robot để di chuyển đồ vật | Môn Công nghệ kỹ thuật điện tử - viễn thông - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
88 44