BÁO CÁO GIỮA KỲ MÔN LTCB-ĐT: DỰ ÁN LOA THÔNG MINH. Môn Ngôn ngữ lập trình | Đại học Trường Đại học Phenika.
Chúng em xin cam đoan rằng đề tài “Lao công nghệ” do Nhóm số … thực hiện, gồm các thành viên Dương Ngọc Anh và Nguyễn Đình Dương, là kết quả của quá trình nghiên cứu nghiêm túc, sự cố gắng và nỗ lực hợp tác của cả nhóm, dưới sự hướng dẫn tận tình của Thầy Nguyễn Viết Chiến.
Toàn bộ nội dung trong báo cáo là trung thực, không sao chép, vay mượn hay sử dụng trái phép từ bất kỳ cá nhân hay tổ chức nào. Những tài liệu được tham khảo đều có nguồn gốc rõ ràng và đã được trích dẫn đầy đủ.
Nếu phát hiện có bất kỳ hành vi sao chép hay gian lận nào, chúng em xin hoàn toàn chịu trách nhiệm trước hội đồng và nhà trườngBÁO CÁO GIỮA KỲ MÔN LTCB-ĐT: DỰ ÁN LOA THÔNG MINH. Môn Ngôn ngữ lập trình | Đại học Trường Đại học Phenika.
Tài liệu gồm 21 trang giúp bạn tham khảo, củng cố kiến thức và ôn tập đạt kết quả cao trong kỳ thi sắp tới. Mời bạn đọc đón xem!
Môn: Ngôn ngữ lập trình C (Phenikaa) 7 tài liệu
Trường: Đại học Phenika 1.3 K tài liệu
Tác giả:








Preview text:
lOMoAR cPSD| 59561309
ĐẠI HỌC PHENIKAA Khoa Điện – Điện tử
BÁO CÁO GIỮA KỲ HỌC PHẦN
LẬP TRÌNH CĂN BẢN_ĐIỆN TỬ ĐỀ TÀI : LOA THÔNG MINH
Giáo viên hướng dẫn : Nguyễn Viết Chiến
Nhóm 4 – Lớp : Lập trình căn bản – điện tử -1-3-24 (N01) – kỳ 3 1. Dương Ngọc Anh MSSV:
23012040 Lớp: AI&ROBOT – K17 2. Nguyễn Đình Dương MSSV: 23010971 Lớp: AI&ROBOT – K17
Hà Nội , ...... tháng 6 năm 2025 1 lOMoAR cPSD| 59561309
Bảng phân chia công việc STT Họ tên
Nội dung thực hiện Ghi chú 1 Dương Ngọc Anh
• Lập ý tưởng thực hiện project Nhóm trưởng
• Nội dung 1: Lập trình thu thập dữ liệu cảm biến: VL53L0X,
MPU6050, 18B20, xử lí DSP trên ADAU1701, xử lí nút bấm QCC5125,đèn RGB dùng INMP441+ esp32+ WLED firmware
• Viết báo cáo nội dung 1
• Thiết kế lắp đặt phần cứng • Code IDE + LabVIEW
• Chuẩn bị file báo cáo 2 Nguyễn Đình Dương
• Lập ý tưởng thực hiện project Thành viên
• Nội dung 2: Lập trình thu thập dữ
liệu cảm biến: LM35, TTP223,
KY032, điều khiển servo, nút bấm cho QCC5125
• Viết báo cáo nội dung 2
• Thiết kế lắp đặt phần cứng • Code Labview
• Chuẩn bị file báo cáo 2 lOMoAR cPSD| 59561309 LỜI CAM ĐOAN
Chúng em xin cam đoan rằng đề tài “Lao công nghệ” do Nhóm số … thực hiện, gồm các thành viên
Dương Ngọc Anh và Nguyễn Đình Dương, là kết quả của quá trình nghiên cứu nghiêm túc, sự cố gắng
và nỗ lực hợp tác của cả nhóm, dưới sự hướng dẫn tận tình của Thầy Nguyễn Viết Chiến.
Toàn bộ nội dung trong báo cáo là trung thực, không sao chép, vay mượn hay sử dụng trái phép từ bất
kỳ cá nhân hay tổ chức nào. Những tài liệu được tham khảo đều có nguồn gốc rõ ràng và đã được trích dẫn đầy đủ.
Nếu phát hiện có bất kỳ hành vi sao chép hay gian lận nào, chúng em xin hoàn toàn chịu trách nhiệm
trước hội đồng và nhà trường.
Hà Nội, ngày … tháng … năm ……
Sinh viên thực hiện (Ký và ghi rõ họ tên) 3 lOMoAR cPSD| 59561309 MỤC LỤC
CHƯƠNG 1: TỔNG QUAN VÀ CÁC GIẢI PHÁP THỰC HIỆN………………………………………………………7
1.1 Mở đầu…………………………………………………………………………………………………………………...7
1.2 Các phương pháp xử lý âm thanh (Nguyên lý hoạt động của loa) …………………………………………………..9
1.3 Các phương pháp khuếch đại âm thanh……………………………………………………………………………….10
1.4 Các phương pháp điều khiển loa công nghệ…………………………………………………………………………...10
1.5 Kết luận chương 1……………………………………………………………………………………………………….10
CHƯƠNG 2: THIẾT KẾ HỆ THỐNG…………………………………………………………………………………….11
2.1 Sơ đồ tổng quát hệ thống………………………………………………………………………………………………..11
2.2 Nguyên lý giao tiếp giữa các phần cứng ……………………………………………………………………………….11
2.3 Nguyên lý hoạt động…………………………………………………………………………………………………….12
2.4 Danh sách linh kiện, thiết bị……………………………………………………………………………………………16
CHƯƠNG 3: KẾT QUẢ THỰC HIỆN VÀ KẾT LUẬN…………………………………………………………………21
3.1 Lập trình giao diện điều khiển …………………………………………………………………………………………21 •
3.1.1 Nội dung 1…………………………………………………………………………………………………….21 •
3.1.2 Nội dung 2…………………………………………………………………………………………………….21
3.1.3 Hình ảnh giao diện chính……………………………………………………………………………………………..22
3.3 Kết quả thực nghiệm……………………………………………………………………………………………………23
3.4.1 Cài đặt thông số ban đầu……………………………………………………………………………………………...23
3.4.2 Kết luận và hướng phát triển…………………………………………………………………………………………23 4 lOMoAR cPSD| 59561309 LỜI CẢM ƠN
Trước hết, nhóm chúng em xin gửi lời cảm ơn chân thành và sâu
sắc tới Thầy Nguyễn Viết Chiến – người đã tận tình hướng dẫn, hỗ trợ và
định hướng cho nhóm trong suốt quá trình chọn và thực hiện đề tài “Lao
công nghệ”. Sự tận tâm và những ý kiến đóng góp quý báu của Thầy là
yếu tố quan trọng giúp nhóm hoàn thiện báo cáo này.
Chúng em cũng xin cảm ơn Trường Đại học Phenikaa đã đưa môn
Lập trình cơ bản cho Điện tử vào chương trình giảng dạy. Môn học đã
cung cấp cho chúng em nhiều kiến thức bổ ích về lập trình điều khiển,
phần mềm (Labview) và phần cứng(Arduino UNO R3). Bên cạnh kiến thức
chuyên môn, môn học còn giúp chúng em cải thiện các kỹ năng mềm
quan trọng như: kỹ năng thuyết trình, kỹ năng lắng nghe tìm kiếm , kỹ
năng viết báo cáo, kỹ năng làm việc nhóm 4 . Đây là những hành trang
vô cùng quý giá, hỗ trợ chúng em không chỉ trong học tập mà còn trong công việc tương lai.
Chúng em xin trân trọng cảm ơn quý Thầy Cô trong Khoa đã luôn
tạo điều kiện thuận lợi để nhóm có thể triển khai đề tài một cách hiệu
quả. Đồng thời, nhóm cũng chân thành cảm ơn các bạn sinh viên và
những cá nhân đã hỗ trợ, góp ý trong suốt quá trình thực hiện đề tài.
Mặc dù đã cố gắng hết sức, nhưng do thời gian và kinh nghiệm còn
hạn chế, báo cáo không tránh khỏi những thiếu sót. Nhóm rất mong nhận
được sự thông cảm và các ý kiến đóng góp quý báu để có thể hoàn thiện
hơn trong những lần nghiên cứu sau. Trân trọng cảm ơn! 5 lOMoAR cPSD| 59561309
CHƯƠNG 1: TỔNG QUAN VÀ CÁC GIẢI PHÁP THỰC HIỆN 1.1 Mở đầu
Trong bối cảnh công nghệ âm thanh và thiết bị nghe nhìn ngày
càng phát triển, loa công nghệ không chỉ đơn thuần là thiết bị phát
âm thanh, mà còn đóng vai trò như một phần tử thông minh trong
các hệ thống giải trí, nhà ở thông minh và môi trường làm việc hiện
đại. Đề tài “Loa công nghệ” hướng đến việc nghiên cứu, phân tích
và chế tạo một hệ thống loa tiên tiến, tích hợp các công nghệ điều
khiển thông minh, kết nối không dây, tối ưu chất lượng âm thanh và
đảm bảo hiệu năng vận hành thông qua hệ thống cảm biến.
Mục tiêu của đề tài là thiết kế và chế tạo một thiết bị loa có khả năng: •
Tái tạo âm thanh chất lượng cao và chân thực qua công nghệ DSP cao cấp; •
Kết nối Bluetooth ổn định; •
Điều khiển âm lượng, chế độ hoạt động qua phần mềm
LabVIEW hoặc nút bấm vật lý; •
Tự động đóng/mở hộp điều khiển khi phát hiện người dùng muốn điều khiển; •
Tự động kích hoạt quạt tản nhiệt cho bộ nguồn khi nhiệt độ quá
ngưỡng hoạt động ổn định. •
Tự động ngắt mạch công suất khi nhiệt độ Loa SUB quá cao
vượt ngưỡng hoạt động ổn định; •
Giảm tần số cộng hưởng của thùng loa và loa khi âm thanh có
tần số cộng hưởng biên độ lớn làm loa rung lắc, di chuyển
nhằm duy trì độ ổn định của hệ thống bên trong. 6 lOMoAR cPSD| 59561309 •
Giảm tần số âm thanh thấp khi đặt gần các bề mặt như góc
tường để tránh cộng hưởng tần số thấp gây nhức đầu và ồm, cân
bằng âm thanh với môi trường. •
Loa có khả năng nháy theo nhạc, tín hiệu âm thanh từ môi
trường hoặc theo ý người dùng điều khiển qua wifi.
Ý tưởng lựa chọn đề tài
Xuất phát từ nhu cầu ngày càng cao của người dùng về một
thiết bị loa không chỉ phát ra âm thanh chất lượng mà còn có
tính linh hoạt, thông minh và an toàn trong vận hành, nhóm
thực hiện đề tài đã nảy ra ý tưởng kết hợp giữa công nghệ âm
thanh truyền thống với các giải pháp xử lý, điều khiển và
các cảm biến hiện đại. Không chỉ dừng lại ở việc tái tạo âm
thanh trung thực, thiết bị còn cần có khả năng tự điều chỉnh, kết
nối không dây và xử lý các tình huống quá nhiệt hoặc rung lắc
mạnh – những yếu tố ảnh hưởng trực tiếp đến tuổi thọ và hiệu quả của loa.
Ý nghĩa thực tiễn của đề tài •
Đề tài không chỉ giúp sinh viên áp dụng kiến thức lý thuyết vào
thực tiễn, mà còn góp phần định hướng phát triển các thiết bị
âm thanh thông minh trong đời sống hiện đại. Việc tích hợp các
chức năng như điều khiển qua LabVIEW, cảm biến nhiệt độ, tự
động ngắt khi quá tải và giảm rung khi beat cao không chỉ nâng
cao trải nghiệm người dùng, mà còn tăng độ bền và độ ổn
định cho thiết bị. Đề tài có thể ứng dụng trong các mô hình nhà
thông minh, thiết bị giải trí đa năng, và có khả năng phát triển
thành sản phẩm thương mại trong tương lai. 7 lOMoAR cPSD| 59561309
Các nội dung chính bao gồm: •
Nghiên cứu các phương pháp xử lý âm thanh và điều khiển tự động cho loa. •
Lựa chọn linh kiện phù hợp. •
Thiết kế mạch điện và vỏ hộp. •
Lập trình điều khiển (Arduino/ESP32/Adau1701) và giao diện điều khiển (app/PC). •
Kiểm tra chất lượng và cải tiến. •
Giao diện lập trình điều khiển chính trên Labview.
1.2 Các phương pháp xử lý âm thanh (Nguyên lý hoạt động của loa)
• Âm thanh DIGITAL hoặc ANALOG (ADC) được phân tích
tín hiệu và điều chỉnh bằng các tools DSP trong SigmaStudio
để cho ra âm thanh cân bằng hoặc theo ý người dùng bằng cách
đo tần số cọng hưởng riêng của loa trước và sau khi lắp vào
thùng, dựa vào đó điều chỉnh âm thanh cân bằng cũng như là
Dymamic EQ tuyến tính với dữ liệu ESP truyền vào để loa
hoạt động ổn định, không rung quá mạnh và có thể đa dạng vị trí của loa.
• Độ lớn được điều khiển từ Adruino, nhận tín hiệu Encoder
chuyển PWM Phase sang Boolean Control để điều khiển tín
hiệu tăng giảm vào QCC5125 Module.
• Âm thanh được chia làm 5 kênh tín hiệu được Crossover tới 3
DAC ( DIGITAL TO ANALOG) xuất ra 2 kênh Stereo
chuyên cho loa dải Cao, 2 kênh chuyên cho loa dải Trung, và 1
kênh MONO cho dải trầm ( vì âm thanh tần số thấp có bước
sóng dài nên có nhiều tần số âm thanh tràm sẽ bị cộng hưởng, 8 lOMoAR cPSD| 59561309
Distotion, Phase, triệt tiêu lẫn nhau,… nên sẽ chỉ cần 1 kênh trầm MONO).
1.3 Các phương pháp khuếch đại âm thanh
• Mạch công suất không dùng phân tần thụ động mà dùng phân
tần chủ động, mỗi kênh 1 IC Ampli class D để ra mỗi loa.
• Âm thanh được qua mạch tiền khuếch đại bằng OP AMP để đẩy
tín hiệu nhỏ rõ hơn cũng như là đưa âm lượng về mức phù hợp
trước khi đưa ra mạch công suất.
• Như mạch này sẽ dùng 3 mạch ic TPA3116, TPA3156D2,
TPA3156 MONO để khuếch đại stereo dải tần số Cao từ DAC1,
tần số Trung từ DAC2, tần số thấp Mono từ DAC3.
1.4 Các phương pháp điều khiển loa công nghệ •
Sử dụng MCU (như Arduino, ESP32):
Điều khiển âm lượng, chuyển bài, dừng, chế độ EQ khác nhau, chế độ đầu vào • Bluetooth Module (QCC5125):
Kết nối không dây giữa loa và điện thoại hoặc từ tín hiệu Analog.
1.5 Kết luận chương 1
Sau khi phân tích các giải pháp, đề tài lựa chọn sử dụng loa điện động kết
hợp IC khuếch đại Class D (TPA3116D2, TPA3156), MCU ESP32,
Adruino ,QCC5125 để điều khiển, và kết nối Bluetooth để truyền phát âm
thanh từ thiết bị di động. Hệ thống được thiết kế hướng đến: •
Tối ưu hiệu suất – chất lượng âm thanh cao. •
Có khả năng điều khiển thông minh. 9 lOMoAR cPSD| 59561309
CHƯƠNG 2: THIẾT KẾ HỆ THỐNG 2.1 Sơ đồ
tổng quát hệ thống
Hình 1 Sơ đồ ý tưởng
Xuất phát từ yêu cầu thiết bị, hệ thống được xây dựng gồm các khối chính: • Khối cấp nguồn • Khối Sensor •
Khối MCU điều khiển (ESP32), Adruino Uno R3 •
Khối Bluetooth Audio Receiver • Khối xử lí DSP • Khối PreAmp •
Khối khuếch đại công suất • Khối loa 10 lOMoAR cPSD| 59561309
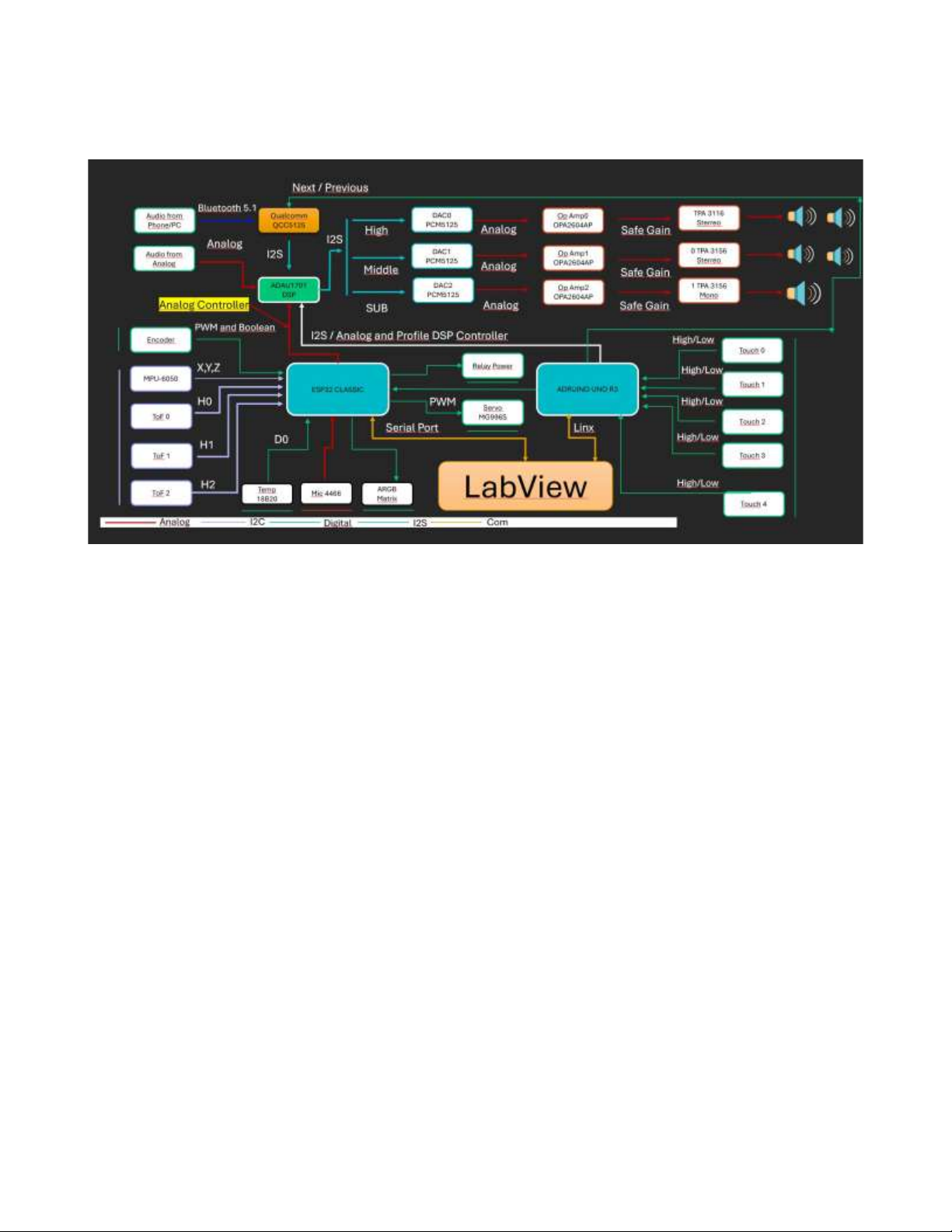
2.2 Nguyên lý giao tiếp giữa các phần cứng
Hình 2 Sơ đồ khối
2.3 Nguyên lý hoạt động
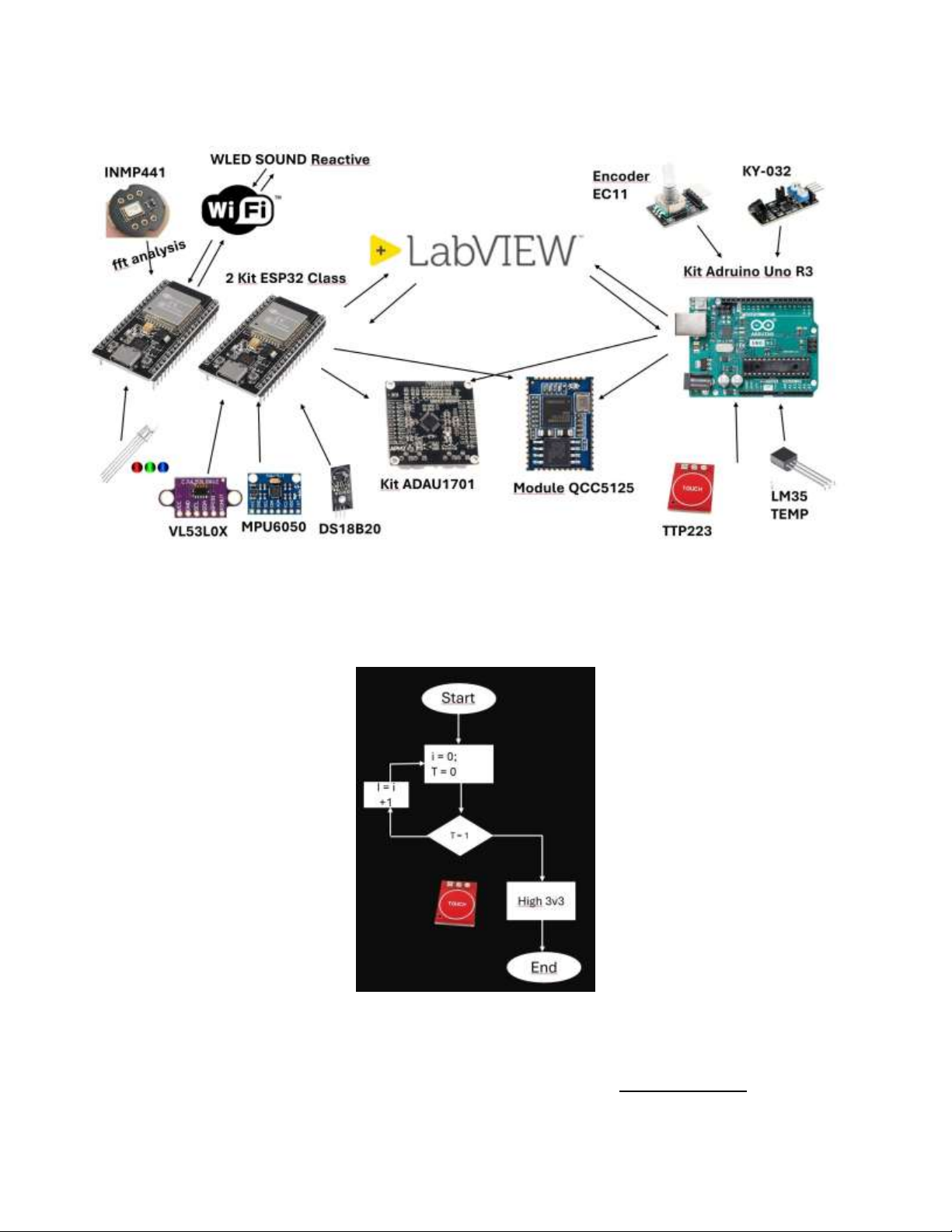
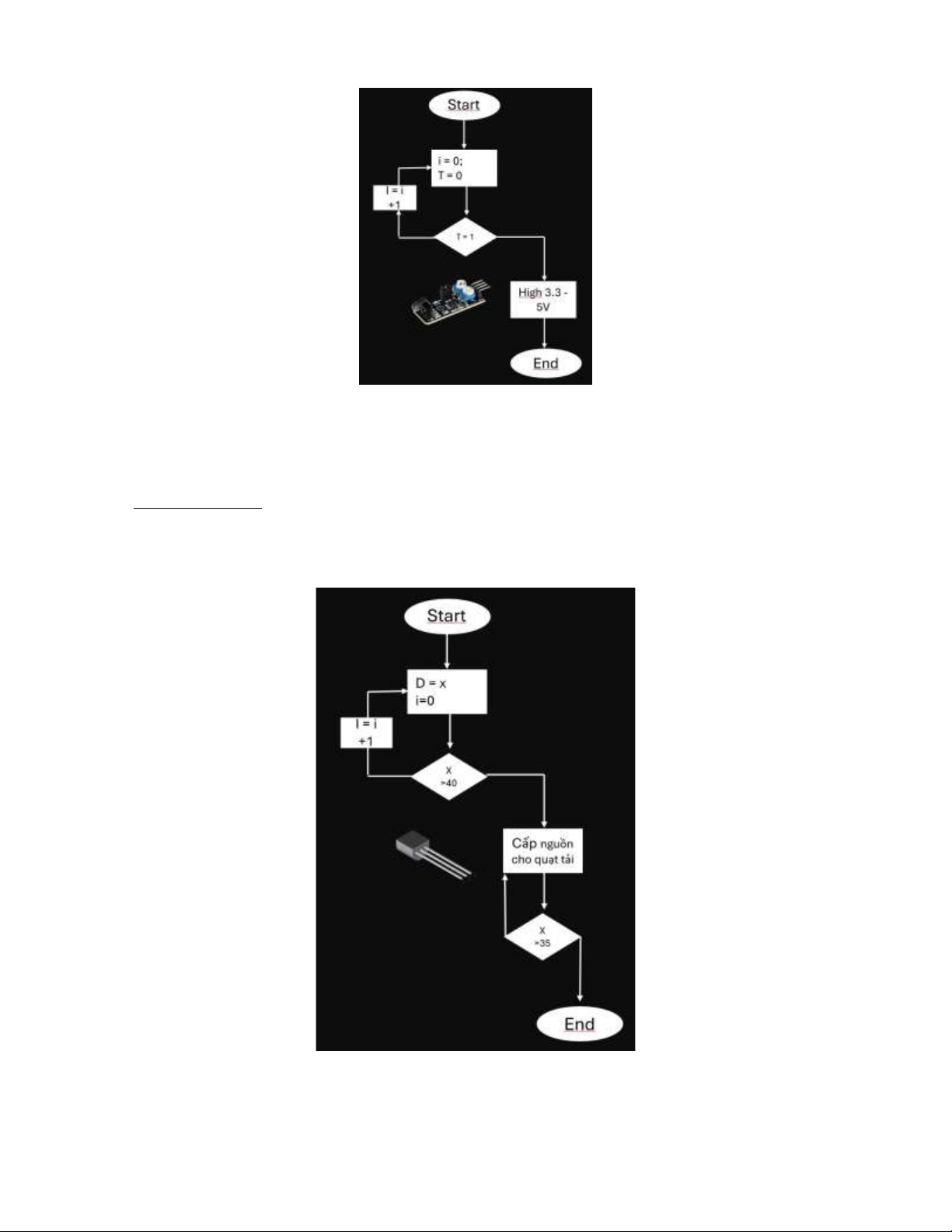
Hình 3 Sồ nguyên lý hoạt động của TTP223
Gồm 3 chân , theo thứ tự từ trái sang phải là chân max , chân data và chân ngồn
(3,3V). Chân data là dạng dữ liệu digital ( 0 và 1) gửi về cho phần cứng Arduino UNO R3 qua trân
digital gửi dữu liệu đến cho labview sử lý ( gồm 5 con chạm mỗi con có chức năng riêng ). Với nguyên
lý tạo ra vùng cảm ứng điện dung khi tay ta chạm vào vùng cảm ứng thì cảm biến sẽ nhận diện dạng
High(1) , còn không có vật thể ( dẫn điện ) thì cảm biến sẽ nhận diện dạng Low(0). 11 lOMoAR cPSD| 59561309
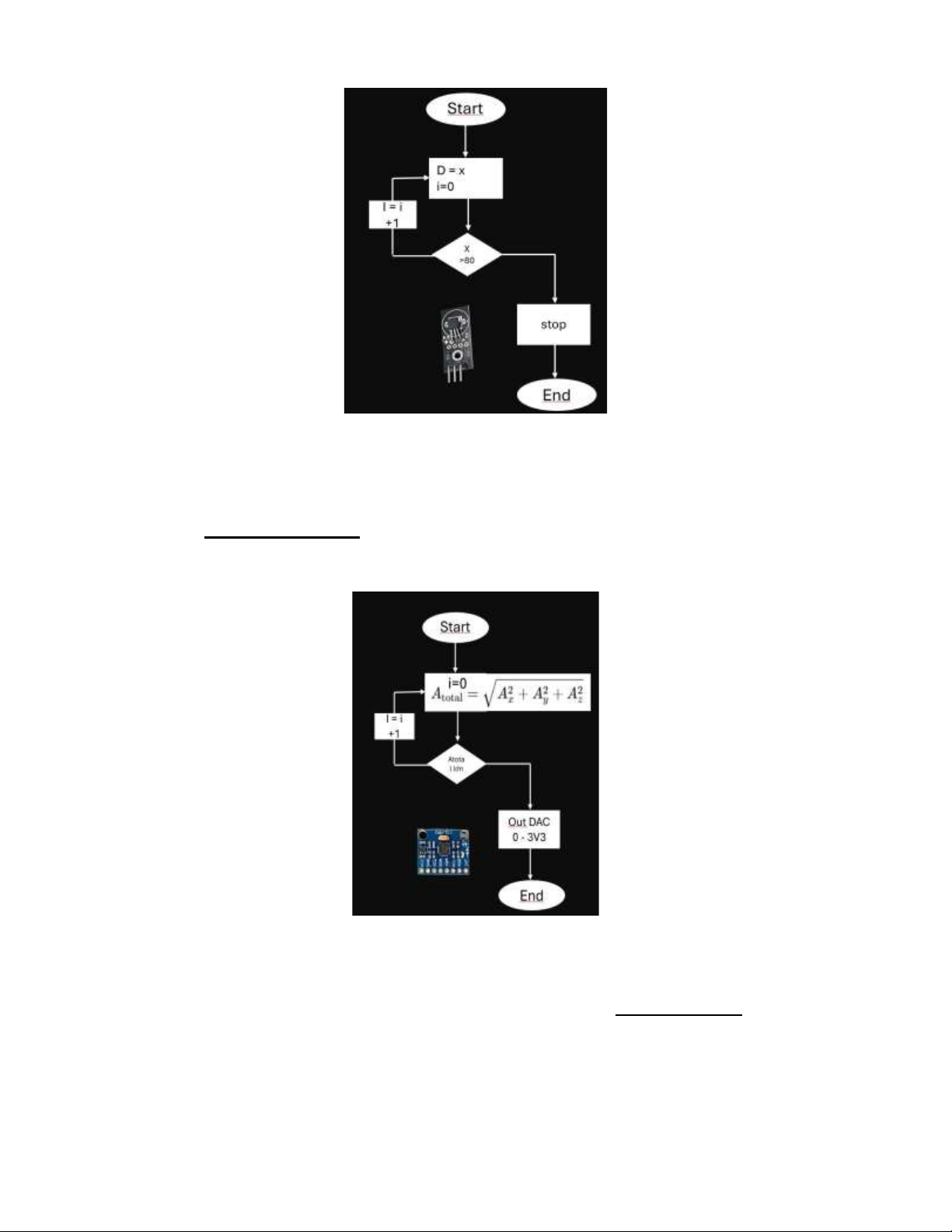
Hình 4 Sồ nguyên lý hoạt động của 18P20
Gồm 3 chân , theo thứ tự từ phải sang trái là chân max , chân data và chân ngồn (3,3V) . Chân data là
dạng dữu liệu digital ( cảm biến tự chuyển từ dạng dữu liệu analog sang dạng dữu liệu digital) gửi về
cho phần cứng ESP32 DevKit V1 qua trân digital gửi dữu liệu đến cho labview sử lý. Cảm biến gửi
dữu liệu về labview , nếu nhiệt độ cao trên 80 độ C thì sẽ ngừng cấp điện cho lao để loa ngừng hoạt
động để lao nghỉ ( đảm bảo an toàn và kéo dài tuổi thọ cho các thiết bị).
Hình 5 Sồ nguyên lý hoạt động của MPU6050
Cảm biến MPU6050 gồm 3 chân kết nối chính: chân VCC (nguồn 3.3V), chân GND
(mass) và chân DATA, truyền dữ liệu qua giao tiếp I2C về vi điều khiển ESP32 DevKit V1 thông qua hai
chân SCL (clock) và SDA (data). ESP32 tiếp nhận dữ liệu từ MPU6050 và gửi về phần mềm LabVIEW để
xử lý. Cảm biến đo gia tốc tuyến tính gây ra bởi chuyển động hoặc trọng lực trong không gian 3 chiều
chuyền dữu liệu 3 trục xyz ứng với các gia tốc từng trục . Khi Atotal ở mức cao thì sẽ cấp nguồn 0-3.3V
để giảm tần số của loa xuống mức an toàn. 12 lOMoAR cPSD| 59561309
Hình 6 Sồ nguyên lý hoạt động của KY-032
Gồm 4 chân kết nối chính: VCC (nguồn 3.3V hoặc 5V), GND (mass), DO (Digital Output) và AO (Analog
Output – tùy module). Trong ứng dụng này, chân DO (dạng digital 0 hoặc 1) được kết nối với vi điều
khiển Arduino UNO R3 thông qua một chân digital bất kỳ để gửi tín hiệu về phần mềm LabVIEW xử lý.
Khi tay ta tới gần cảm biến , cảm biến phát hiện chuyền dữu liệu High(1) về phần cứng xử lý cấp nguồn
cho servo quay 360 độ để đẩy bảng lề lên còn khi không phát hiện thì cảm biến nhâp giá trị Low(0)
không cấp nguồn cho servo ( về trạng thái nghỉ).
Hình 7 Sồ nguyên lý hoạt động của LM35 13 lOMoAR cPSD| 59561309
Gồm 3 chân , theo thứ tự từ phải sang trái là chân max , chân data và chân ngồn
(3V-5.5V) . Chân data là dạng dữu liệu analog gửi về cho phần cứng Arduino UNO R3 qua trân analog
gửi dữu liệu đến cho labview sử lý. Cảm biến gửi dữu liệu về labview , nếu nhiệt độ cao trên 40 độ C
thì sẽ cấp điện cho quạt tải nhiệt hoạt động đến khi nhiệt độ dưới 35 độ C thì ngừng cấp nguồn cho quạt .
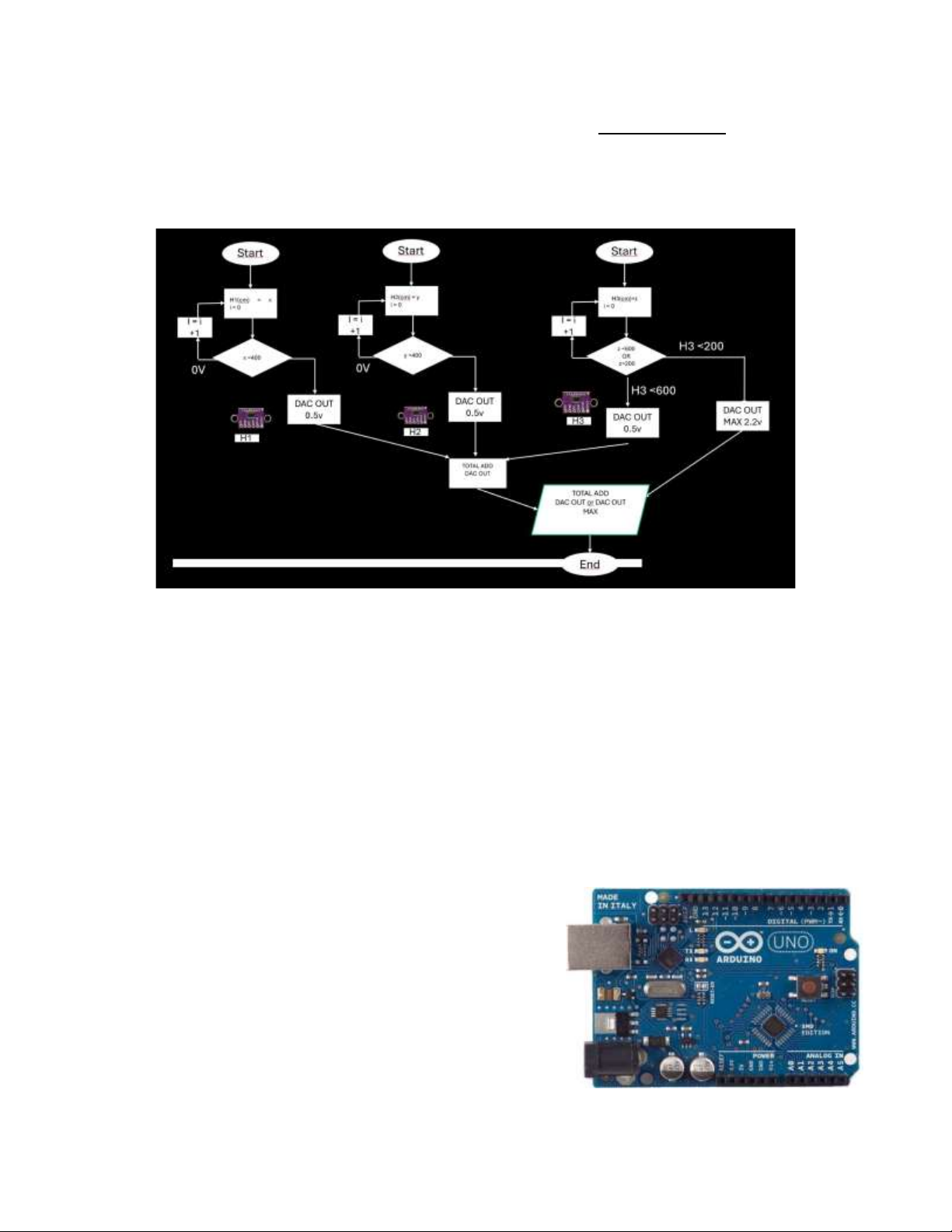
Hình 8 Sồ nguyên lý hoạt động của TOF-VL53L0X
Cảm biến TOF VL53LX0 đo khoảng cách tối đa được 2m và không bị nhiễu bởi âm thanh. Cảm biến
gồm 6 chân VCC, GND, SDA,SCL,GPI01,XSHUT. Cảm biến sẽ truyền dữ liệu qua I2C với ESP32 qua các
chân GPIO của ESP32, Chân XSHUT sẽ khởi động từng cảm biến để cho chúng chung bus chân SCL,SDA
và địa chỉ của H1,H2,H3 sẽ lần lượt được chọn khi bật qua các chân XSHUT, Khi H1 đo được <
40cm thì cấp ra 0.5, H2 cũng giống H1, H3 <60cm thì cấp 0.5 , H1+H2+H3 =
“Điện áp ra chân DAC ESP32” hoặc nếu H3 < 20 cm thì “Điện áp ra chân DAC ESP32” = 2.2v
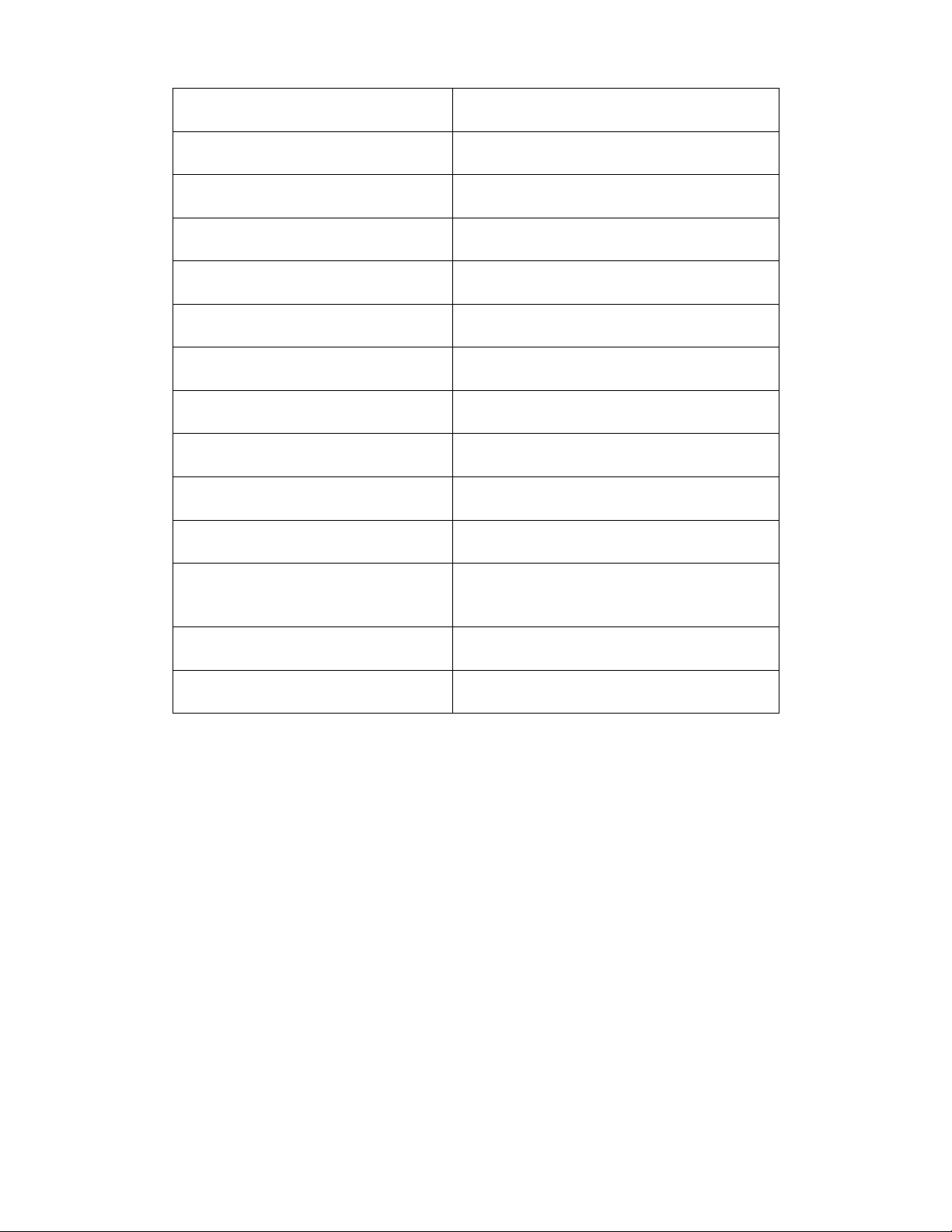
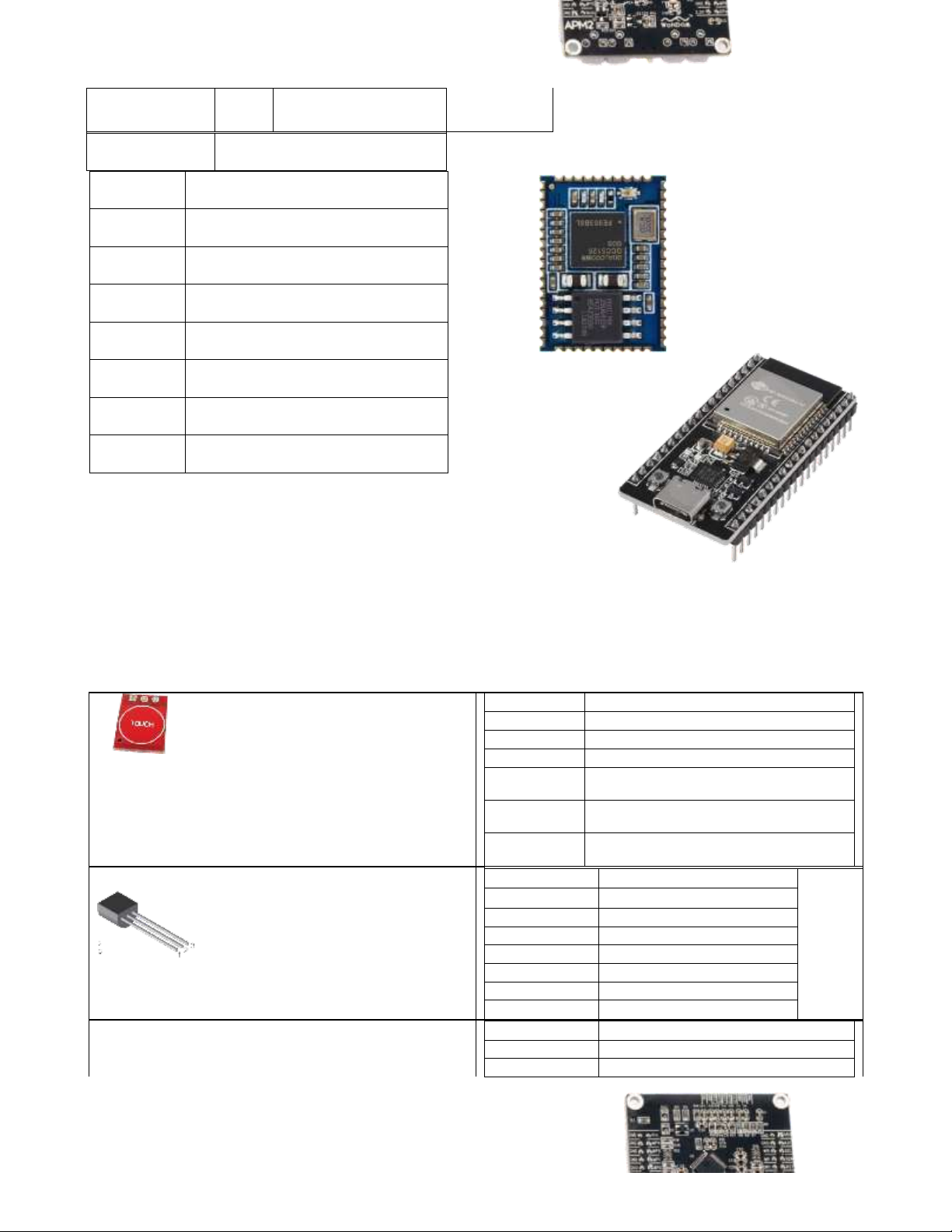
2.4 Danh sách linh kiện, thiết bị
Hình 9 Arduino UNO R3 14 lOMoAR cPSD| 59561309 Vi điều khiển ATmega328 họ 8bit
Điện áp hoạt động
5V DC (chỉ được cấp qua cổng USB)
Tần số hoạt động 16 MHz Dòng tiêu thụ khoảng 30mA
Điện áp vào khuyên 7-12V DC dùng
Điện áp vào giới hạn 6-20V DC Số chân Digital I/O
14 (6 chân hardware PWM) Số chân Analog
6 (độ phân giải 10bit)
Dòng tối đa trên mỗi chân I/O 30 mA
Dòng ra tối đa (5V) 500 mA
Dòng ra tối đa (3.3V) 50 mA Bộ nhớ flash
32 KB (ATmega328) với 0.5KB dùng bởi bootloader SRAM 2 KB (ATmega328) EEPROM 1 KB (ATmega328) 15 lOMoAR cPSD| 59561309 Vi xử lý (CPU)
Dual-core Xtensa LX6 @ 240 MHz RAM 520 KB Flash 4 MB (SPI Flash) Wi-Fi
2.4 GHz, chuẩn 802.11 b/g/n BluetoothLoại v4.2 (BR/EDR + chip BLE)DSP âm thanh (SigmaDSP) Số chân GPIO
hả dụng Khoảng 25 chân50 MIPS kTốc độ xử lý ADC Độ phân giải
12-bit, tối đa 18 kênh24- bit (ADC & DAC) Tần số lấy mẫu 44.1 kHz / 48 kHz DAC 2 kênh (8-bit) ADC tích hợp 2 kênh Giao tiếp UART, I2C, SPI, I2S DAC tích hợp 4 kênh
Điện áp hoạt độn g 3.3V I/O số
Hỗ trợ I2S / TDM (10 in / 10 out) qua chân VIN Nguồn cấp
5V qua USB hoặc 3.3V Giao tiếp
I²C, SPI (chỉ đọc), GPIO hi hoạt động
Dòng tiêu thụTự Có (Self Khoảng 160–260 mA - khởi động k
boot từ EEPROM I²C ngoài) 16 lOMoAR cPSD| 59561309 Kích thướcNguồn ~51 mm x 25.5 m3.3V cấp
(logic), 3.3–5V (analogm )
Phần mềm lập trình
SigmaStudio (Analog Devices) Bluetooth v5.1 (BLE + Classic)
Codec hỗ trợ SBC, AAC, aptX, aptX HD, aptX Adaptive
DSP tích hợp Dual Kalimba DSP
Khử ồn (ANC) Có, hỗ trợ Hybrid ANC Giao tiếp I²S, UART, I²C, SPI ADC / DAC Tích hợp sẵn Nguồn cấp 1.8V – 3.6V Ứng dụng
Tai nghe TWS, loa Bluetooth, thiết bị đeo
Hình 10 Kit ESP32 Class
Hình 12 Module QCC5125 Hình 13 TTP 223 Thông số Giá trị
Điện áp hoạt động 2.0V – 5.5V
Dòng chờ (Idle) ~1.5 µA (ở chế độ tiết kiệm năng lượng)
Dòng hoạt động ~2.0 mA
Tín hiệu đầu ra Digital (HIGH khi chạm, LOW khi không chạm – mặc định) Thời gian phản hồi ~60 ms Kích thước module Khoảng 24mm x 24mm Thông số Giá trị Loại tín hiệu
Analog (điện áp tỷ lệ nhiệt độ)
Dải đo nhiệt độ
0°C đến +100°C (phiên bản LM35DZ)
Điện áp hoạt động 4V – 30V (thường dùng 5V)
Độ phân giải đầu ra 10 mV / °C Hình 14 LM35 Độ chính xác ±0.5°C tại 25°C Dòng tiêu thụ ~60 µA (rất thấp)
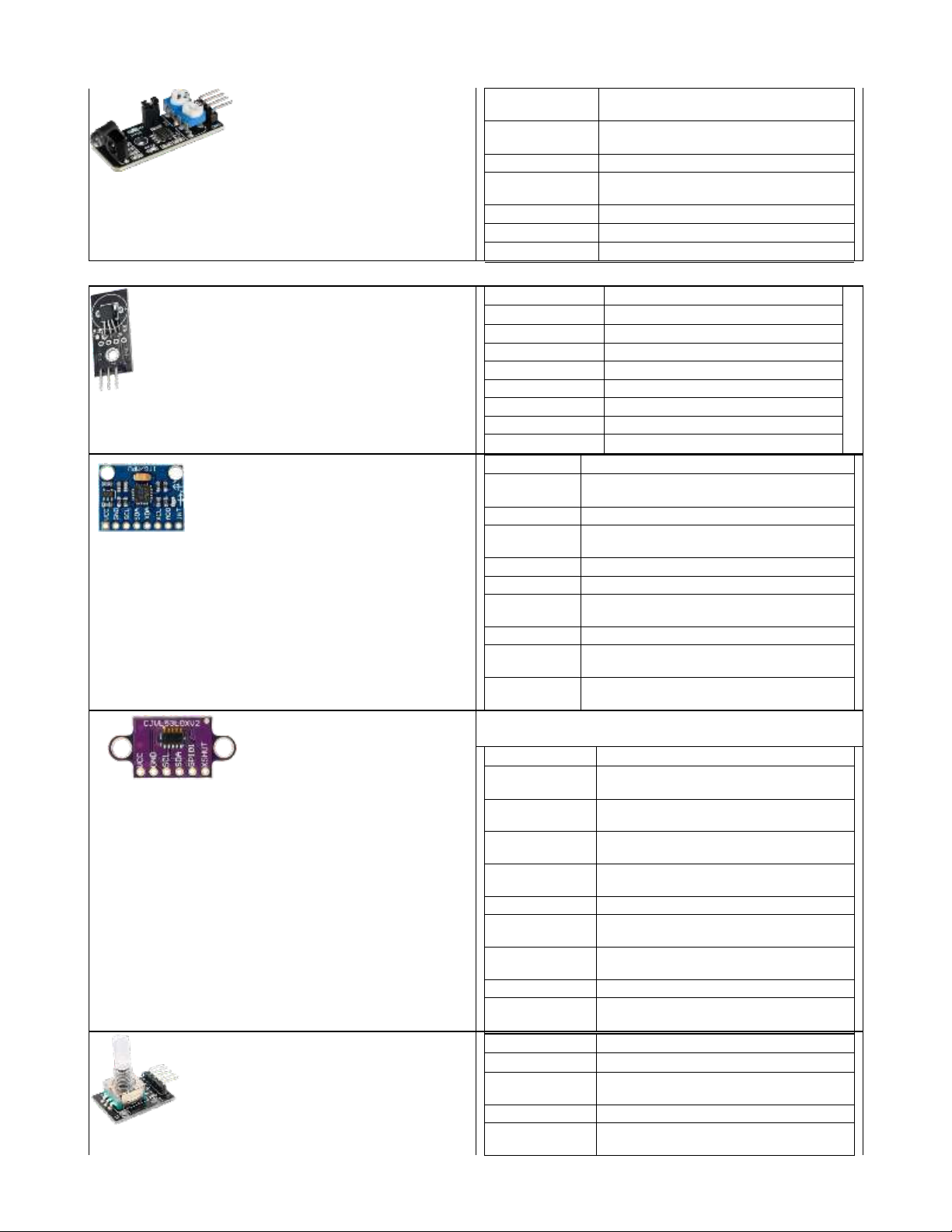
Nhiệt độ hoạt động -55°C đến +150°C (một số phiên bản) Thông số Giá trị Nguồn hoạt động 3.3V – 5V DC Dòng tiêu thụ ~20 mA 17 lOMoAR cPSD| 59561309 Tín hiệu đầu ra
Digital (0 hoặc 1 – mức LOW khi phát hiện vật cản) Khoảng cách phát hiện
2 – 40 cm (có thể điều chỉnh bằng biến trở) Hình 15 KY032 Góc phát hiện ~35 độ
Tốc độ phản hồi
Nhanh (tầm vài ms, phù hợp phát hiện vật thể chuyển động)
Điều chỉnh độ nhạy Có (qua biến trở trên board) Tín hiệu đầu ra
Chân D0 (mức thấp khi có vật cản)
Kích thước module Khoảng 3cm x 1.5cm Thông số Giá trị Giao tiếp
1-Wire (chỉ cần 1 chân dữ liệu)
Điện áp hoạt động 3.0V – 5.5V Dòng tiêu thụ < 1 mA trong lúc đo
Dải đo nhiệt độ -55°C đến +125°C Hình 16 18B20 Sai số
±0.5°C (trong khoảng -10°C đến +85°C) Độ phân giải
9 đến 12 bit (có thể lập trình được)
Thời gian chuyển đổi ~94 ms (độ phân giải 12-bit)
Địa chỉ riêng biệt
Mỗi DS18B20 có 1 mã địa chỉ 64-bit duy nhất Hình 17 Thông số Giá trị MPU6050 Tích hợp
Gia tốc kế 3 trục + Con quay hồi chuyển 3 trục (6 DOF) Giao tiếp
I²C (tốc độ lên đến 400 kHz), địa chỉ mặc định: 0x68 Điện áp hoạt
3.3V (nội bộ) – nhưng có thể dùng với 5V nếu động module có LDO Dải đo gia tốc
±2g, ±4g, ±8g, ±16g (lập trình được)
Dải đo con quay ±250, ±500, ±1000, ±2000 độ/giây (lập trình được) Độ phân giải ADC 16-bit
Tần số lấy mẫu Lên đến 1 kHz (1000 Hz)
Tích hợp DMP Có bộ xử lý chuyển động số (Digital Motion Processor) Nhiệt độ hoạt động -40°C đến +85°C Thông số Giá trị Hình 18 VL53LOX Loại cảm biến
Cảm biến đo khoảng cách bằng laser (Time- ofFlight - ToF) Giao tiếp
I²C (tốc độ lên đến 400 kHz), địa chỉ mặc định: 0x29
Điện áp hoạt động 2.6V – 3.6V (nhiều module có sẵn dùng được với 5V do có LDO)
Dải đo khoảng cách 30mm – 2000mm (2m) tùy chế độ và ánh sáng môi trường Độ chính xác
±3% trong điều kiện lý tưởng Tốc độ đo
Tùy chế độ: 30Hz (tốc độ cao), 1Hz (chính xác cao) Góc phát hiện (FOV) ~25° Tia phát
Hồng ngoại, Class 1 (an toàn với mắt người) Kích thước cảm
~4.4mm x 2.4mm x 1.0mm (module to hơn tùy biến gốc breakout) Hình 19 Thông số Giá trị ENCODER EC11 Loại encoder
Rotary encoder incremental (gia tăng)
Số xung mỗi vòng Thường là 20 xung/vòng (có thể là 15, 24 tùy quay model) Tín hiệu đầu ra
2 pha xung số (A và B – xung vuông lệch pha 90°)
Chế độ hoạt động Xoay vô hạn (không giới hạn góc như potentiometer) 18 lOMoAR cPSD| 59561309
Tốc độ lấy mẫu
kHz – 48 kHz (thường dùng 44.1 hoặc 48 kHz) SNR (Signal-
~61 dB (rất tốt cho giọng nói và âm thanh môi toNoise) trường) Tích hợp AOP
~120 dB SPL (mức âm tối đa mà mic không méo tín hiệu)
Tích hợp nút nhấn Có (nhấn xuống khi xoay trục – SW)
Điện áp hoạt động Tín hiệu cơ học – dùng điện trở kéo (pull-up) với 3.3V hoặc 5V Kích thước trục
Trục tròn phi 6mm (có thể có rãnh) Tuổi thọ
~30.000 đến 100.000 vòng quay (tùy hãng và chất lượng) Hình 20 INMP 441 Thông số Giá trị Loại mic
MEMS microphone kỹ thuật số Giao tiếp
I²S (chuẩn kỹ thuật số truyền tín hiệu âm thanh) Dải điện áp hoạt động
1.8V – 3.3V (thường cấp 3.3V)
Đáp tuyến tần số
~60 Hz – 15 kHz (tùy model, một số lên đến 20 kHz) Tín hiệu đầu ra
PCM kỹ thuật số 24-bit qua I²S
CHƯƠNG 3: KẾT QUẢ THỰC HIỆN VÀ KẾT LUẬN 3.1
Lập trình giao diện điều khiển
3.1.1 Nội dung 1 3.1.2 Nội dung 2 Tổng quát 19 lOMoAR cPSD| 59561309
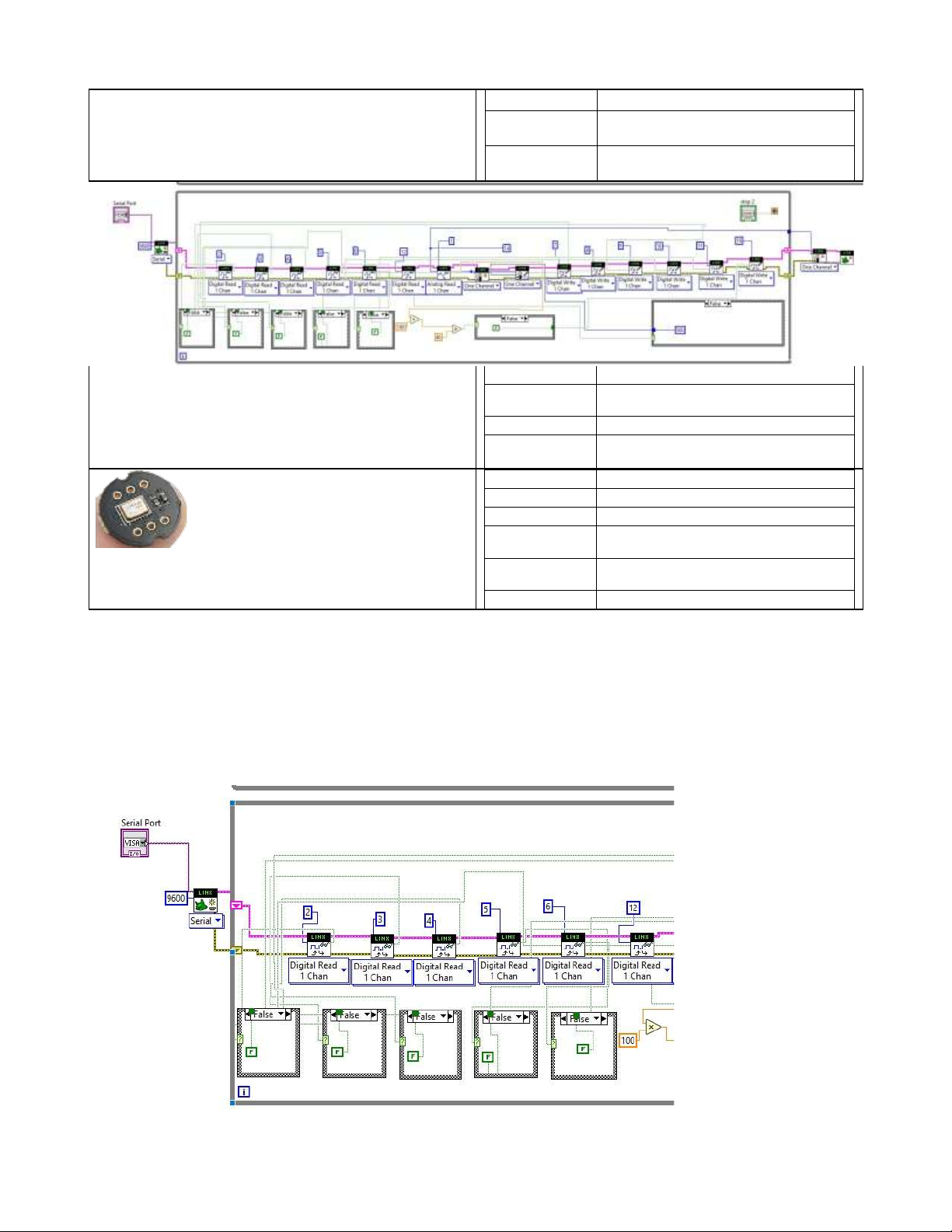
Hình 25 Khối này sử dụng Makerhup dành riêng cho Adruino, đọc tín hiệu Boolean High and Low từ 5
chân Digital được cảm biến TTP223 gửi vào sau đó qu Case Struc để xuất ra DIGITAL Write tín hiệu từ Case Struc.
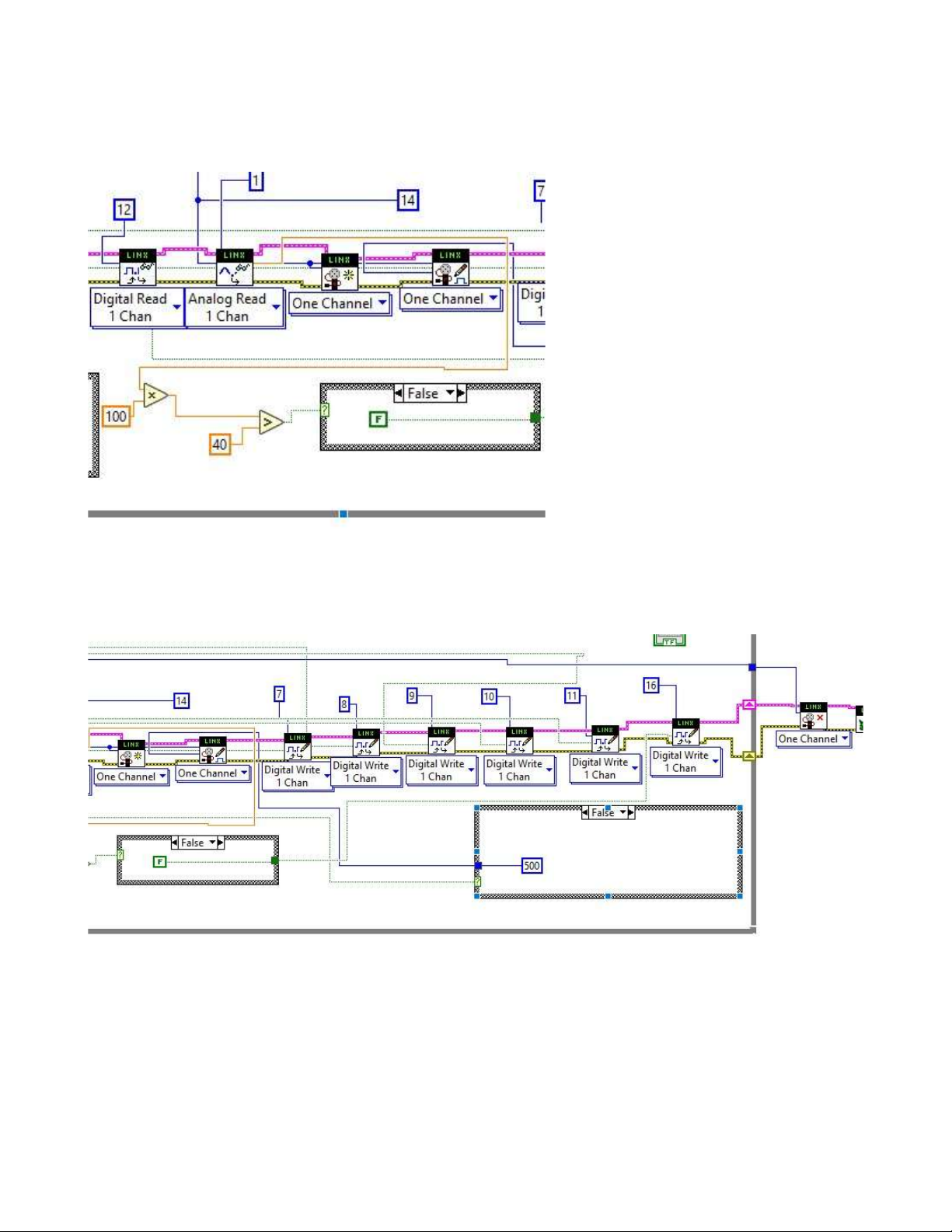
Hình 26 Khối này dùng chân Analog của Uno R3 Đọc tín hiệu điện áp của LM35 10mV/1*C nên ta cần
nhân 100 để chuyển thanh nhiệt độ chuẩn sau đó so sánh với 40 độ, đưa vào Case Struc sau đó Từ
True or Fase constant gửi lên Digital Write để bật tắt relay Fan.
Hình 27 Trong Khối này có khai báo mở Servo kiểm tra góc, sau đó từ cảm biến KY032 đưa vào tín
hiệu High and Low sau đó vào Case Struc, từ Case gửi lên Servo Write ra số us để servo quay góc theo ý mình chỉnh. 20
Tài liệu liên quan:
-
KTMT Kiến Trúc Máy Tính - Bài Giảng 2: Hệ Thống Máy Tính. Môn Ngôn ngữ lập trình | Đại học Trường Đại học Phenika.
67 34 -
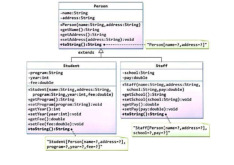
Báo cáo cuối kỳ môn Lập trình hướng đối tượng (N14): Quản lý cấp phát quân trang. Môn Ngôn ngữ lập trình | Đại học Trường Đại học Phenika.
64 32 -

Bài Tập Lập Trình Java: Quản Lý Danh Sách Học Sinh và Tính Toán. Môn Ngôn ngữ lập trình | Đại học Trường Đại học Phenika.
92 46 -
Bài tập Lập trình hướng đối tượng OOP. Môn Ngôn ngữ lập trình | Đại học Trường Đại học Phenika.
75 38