Báo cáo thực hành Lập trình mô phỏng robot & các hệ cđt môn accounting principle | Học viện Nông nghiệp Việt Nam
Làm quen với các công cụ lập trình và mô phỏng Matlab được sửdụng phổbiến trong nghiên cứu và công nghiệp.1.2. Thiết bị thực hành- Máy tính cá nhân hoặc máy tính tại phòng thực hành có cài phần mềmMatlab&Simulink.Tài liệu giúp bạn tham khảo ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Accounting principle (HVNN) 30 tài liệu
Trường: Học viện Nông nghiệp Việt Nam 2.4 K tài liệu
Tác giả:









Preview text:
lOMoAR cPSD| 48541417 Hà Nội - 2024
BÀI THỰC HÀNH SỐ 1 1.1. Mục đích
- Làm quen với các công cụ lập trình và mô phỏng Matlab được sử dụng phổ
biến trong nghiên cứu và công nghiệp.
1.2. Thiết bị thực hành
- Máy tính cá nhân hoặc máy tính tại phòng thực hành có cài phần mềm Matlab&Simulink. - Tài liệu thực hành.
1.3. Các bước thực hành và kết quả
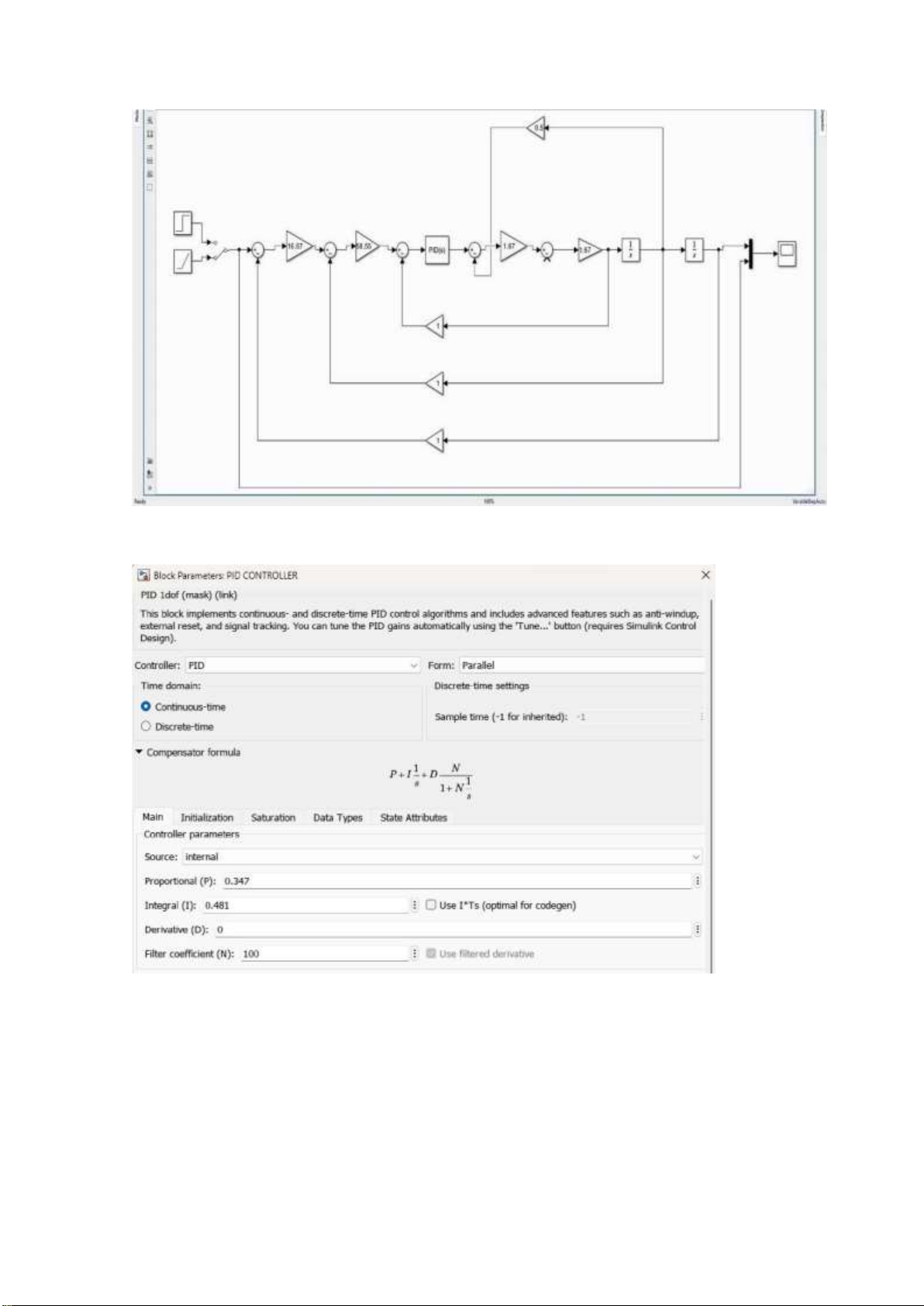
Bài 1: Xây dựng và mô phỏng hệ thống điều khiển tay máy độc lập 3 vòng kín (vị
trí, gia tốc, vận tốc) bằng Simulink Bước 1: Chọn bộ điều khiển
Bước 2: Xây dựng sơ đồ khối
Bước 3: Tiến hành mô phỏng trên Simulink lOMoAR cPSD| 48541417
Bước 4: Thiết lập thông số của các khối ` 1 lOMoAR cPSD| 48541417
* Kết quả mô phỏng
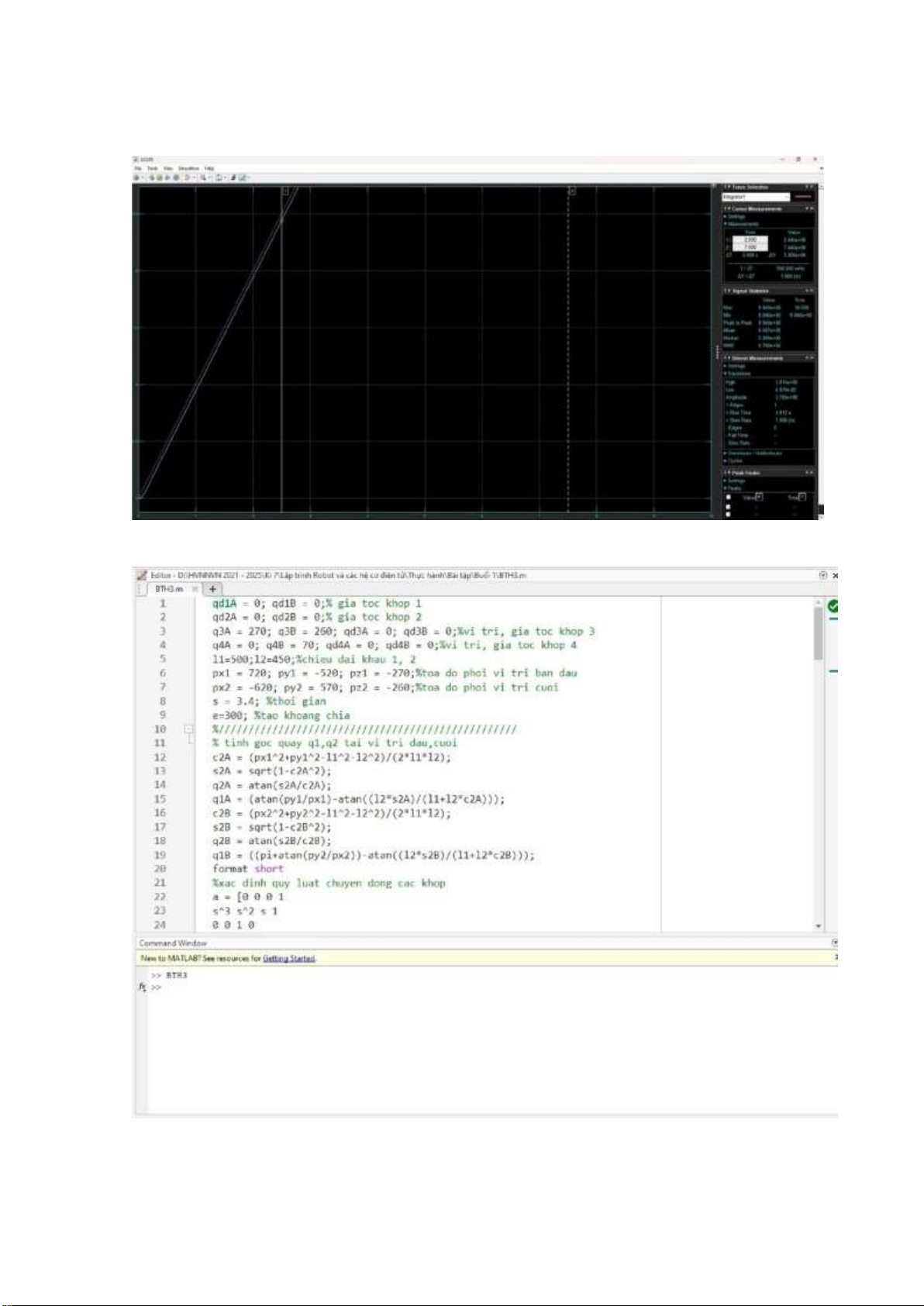
Bài 2: Chương trình giải bài toán động học cho tay máy 4 bậc tự do RRTR ` 2 lOMoAR cPSD| 48541417
qd1A = 0; qd1B = 0;% gia toc khop 1 qd2A = 0; qd2B = 0;% gia
toc khop 2 q3A = 270; q3B = 260; qd3A = 0; qd3B = 0;%vi tri, gia
toc khop 3 q4A = 0; q4B = 70; qd4A = 0; qd4B = 0;%vi tri, gia toc
khop 4 l1=500;l2=450;%chieu dai khau 1, 2 px1 = 720; py1 = -
520; pz1 = -270;%toa do phoi vi tri ban dau px2 = -620; py2 = 570;
pz2 = -260;%toa do phoi vi tri cuoi s = 3.4; %thoi gian e=300; %tao khoang chia
%//////////////////////////////////////////////////
% tinh goc quay q1,q2 tai vi tri dau,cuoi c2A
= (px1^2+py1^2-l1^2-l2^2)/(2*l1*l2); s2A = sqrt(1-c2A^2);
q2A = atan(s2A/c2A); q1A = (atan(py1/px1)-
atan((l2*s2A)/(l1+l2*c2A))); c2B = (px2^2+py2^2-
l1^2-l2^2)/(2*l1*l2); s2B = sqrt(1-c2B^2); q2B =
atan(s2B/c2B); q1B = ((pi+atan(py2/px2))-
atan((l2*s2B)/(l1+l2*c2B))); format short
%xac dinh quy luat chuyen dong cac khop
a = [0 0 0 1 s^3 s^2 s 1 0 0 1 0 3 *s^2 2*s 1 0]; b1 = [q1A;q1B;qd1A;qd1B]; b2 = [q2A;q2B;qd2A;qd2B]; b3 = [q3A;q3B;qd3A;qd3B]; b4 = [q4A;q4B;qd4A;qd4B]; x1 = a^(-1)*b1; x2 = a^(-1)*b2; x3 = a^(-1)*b3; x4 = a^(-
1)*b4; t = linspace(0,s,e); y1 = x1'; 19 ; q1 = polyval(y1,t); yd1 = polyder(y1); qd1 = polyval(yd1,t); ydd1 = polyder(yd1); qdd1 = ` 3 lOMoAR cPSD| 48541417 polyval(ydd1,t); y2 = x2'; q2 = polyval(y2,t); yd2 = polyder(y2); qd2 = polyval(yd2,t); ydd2 = polyder(yd2); qdd2 =
polyval(ydd2,t); y3 = x3'; q3 = polyval(y3,t); yd3 = polyder(y3); qd3 = polyval(yd3,t); ydd3 = polyder(yd3); qdd3 =
polyval(ydd3,t); y4 = x4'; q4 = polyval(y4,t); yd4 = polyder(y4); qd4 = polyval(yd4,t); ydd4 = polyder(yd4); qdd4 = polyval(ydd4,t); format rat %doi voi khop tinh tien q3 plot(t,q3,'g') figure plot(t,qd3,'g') figure 20 ;
plot(t,qdd3,'g') figure %doi voi cac lhop quay q1, q2, q4
plot(t,q1,'r',t,q2,'y',t,q4,'k')
title('do thi vi tri') xlabel(' truc
x(s)') ylabel('truc y(rad)') grid on figure
plot(t,qd1,'r',t,qd2,'y',t,qd4,'k')
title('do thi van toc') xlabel('
truc x(s)') ylabel('truc y(rad/s)') grid on figure
plot(t,qdd1,'r',t,qdd2,'y',t,qdd4,'
k') title('do thi gia toc') xlabel(' ` 4 lOMoAR cPSD| 48541417 truc x(s)') ylabel('truc y(rad/s^2)') grid on=
%xac dinh vi tri diem tac dong cuoi q=q1+q2;
figure x0=0;y0=0;z0=0;plot3(x0,y0,z0,'o') grid on x00 = zeros(1,300); y00 =
zeros(1,300); z00 = zeros(1,300); x11 = l1.*cos(q1);y11 = l1.*sin(q1);z11=
zeros(1,300); x22 = (l1.*cos(q1)+l2.*cos(q));y22 =
(l1.*sin(q1)+l2.*sin(q));z22=zeros(1,300); x33 = (l1.*cos(q1)+l2.*cos(q));y33 =
(l1.*sin(q1)+l2.*sin(q));z33=-q3; 21 ; hold on for i=1:5:300 P11=[x00(i) x11(i)]; P21=[y00(i) y11(i)]; P31=[z00(i) z11(i)]; plot3(P11,P21,P31,'-o')
title('khong gian lam viec') hold on P12=[x11(i) x22(i)]; P22=[y11(i) y22(i)]; P32=[z11(i) z22(i)]; plot3(P12,P22,P32,'-*') title('khong gian lam viec') hold on P13=[x22(i) x33(i)]; P23=[y22(i) y33(i)]; P33=[z22(i) z33(i)]; plot3(P13,P23,P33,'-+') title('khong gian lam viec') ` 5 lOMoAR cPSD| 48541417 xlabel('truc x') ylabel('truc y') zlabel('truc z') End
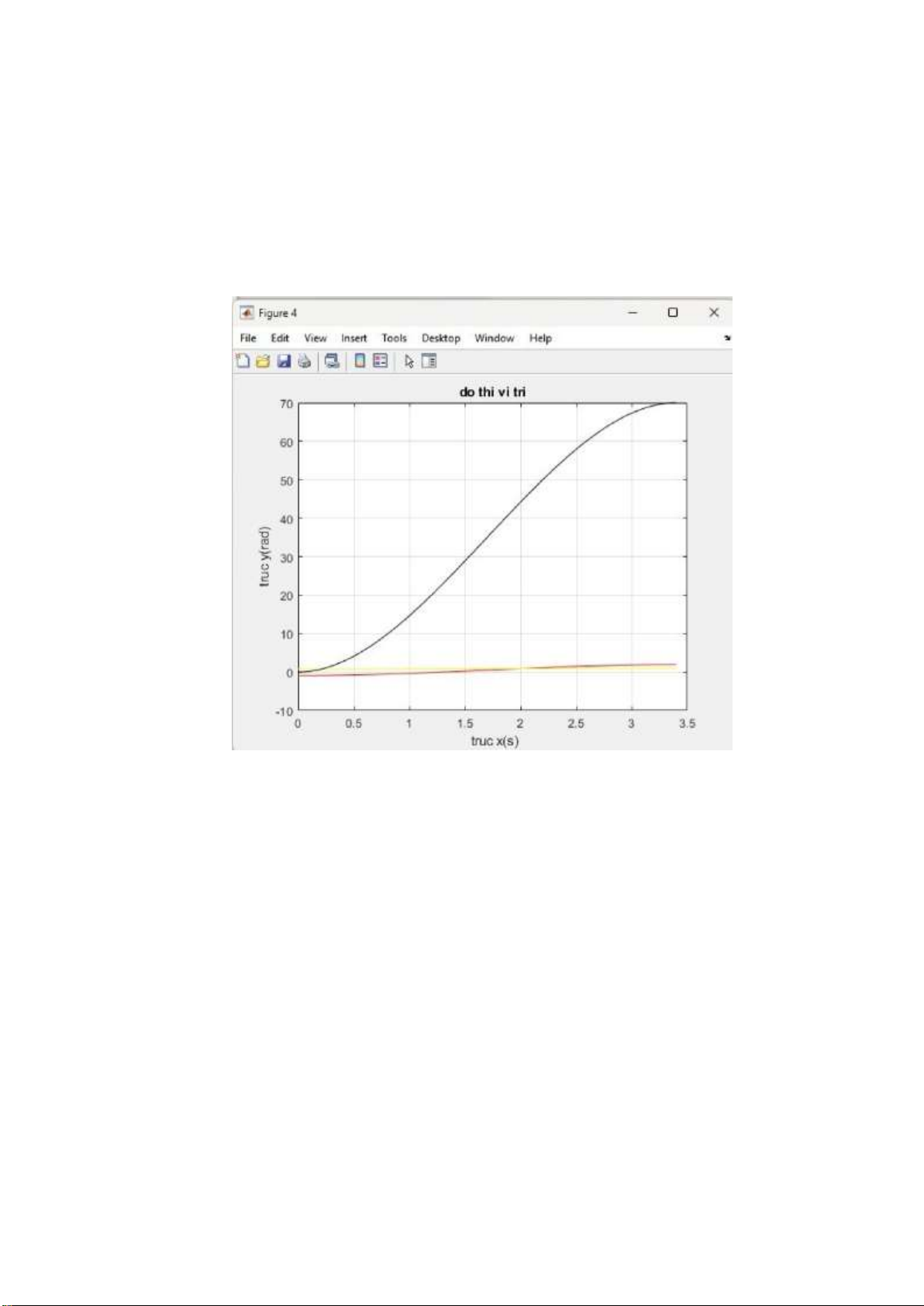
* Kết quả mô phỏng
Đồ thị vị trí ` 6 lOMoAR cPSD| 48541417
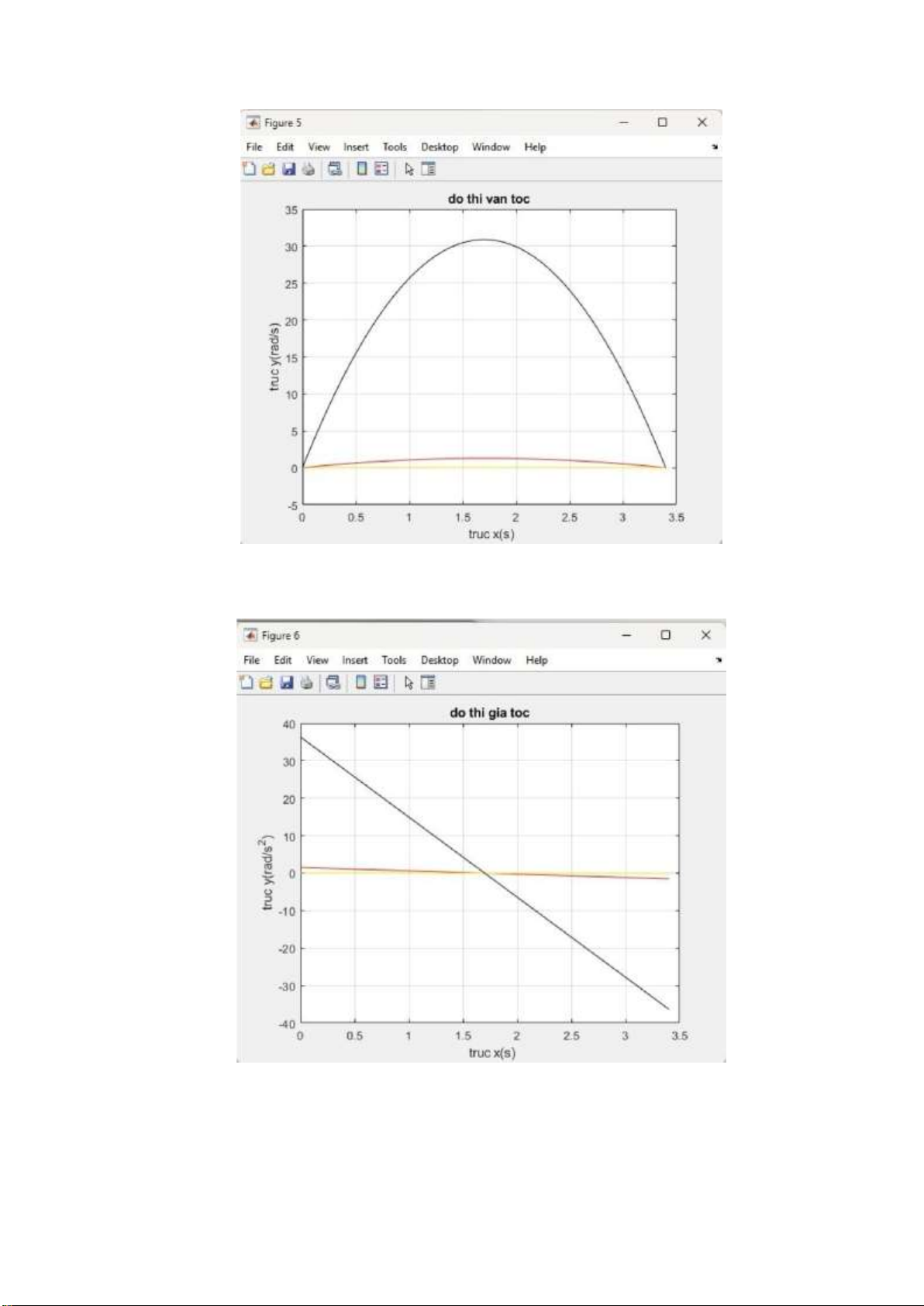
Đồ thị vận tốc
Đồ thị gia tốc ` 7 lOMoAR cPSD| 48541417 ` 8 lOMoAR cPSD| 48541417
BÀI THỰC HÀNH SỐ 2
MÔ PHỎNG CÁNH TAY ROBOT 6 BẬC TRÊN RTOOLBOX
2.1. Mục đích thực hành
- Tìm hiểu cách sử dụng phần mêm RToolbox
- Lập trình và chạy mô phỏng cánh tay robot 6 bậc tự do bằng phần mềm
RToolbox giúp thực hiện các bài toán vận hành robot. Qua đó, nắm được cách
vận hành và sử dụng cánh tay robot một cách hiệu quả, cũng như hiểu rõ hơn về
nguyên lý hoạt động của nó trong các ứng dụng thực tế.
2.2. Thiết bị thực hành - Tài liệu thực hành
- Máy tính cá nhân hoặc máy tính tại phòng thực hành có cài phần mềm Matlab&Simulink.
2.3. Các bước thực hành và kết quả Bài 1:
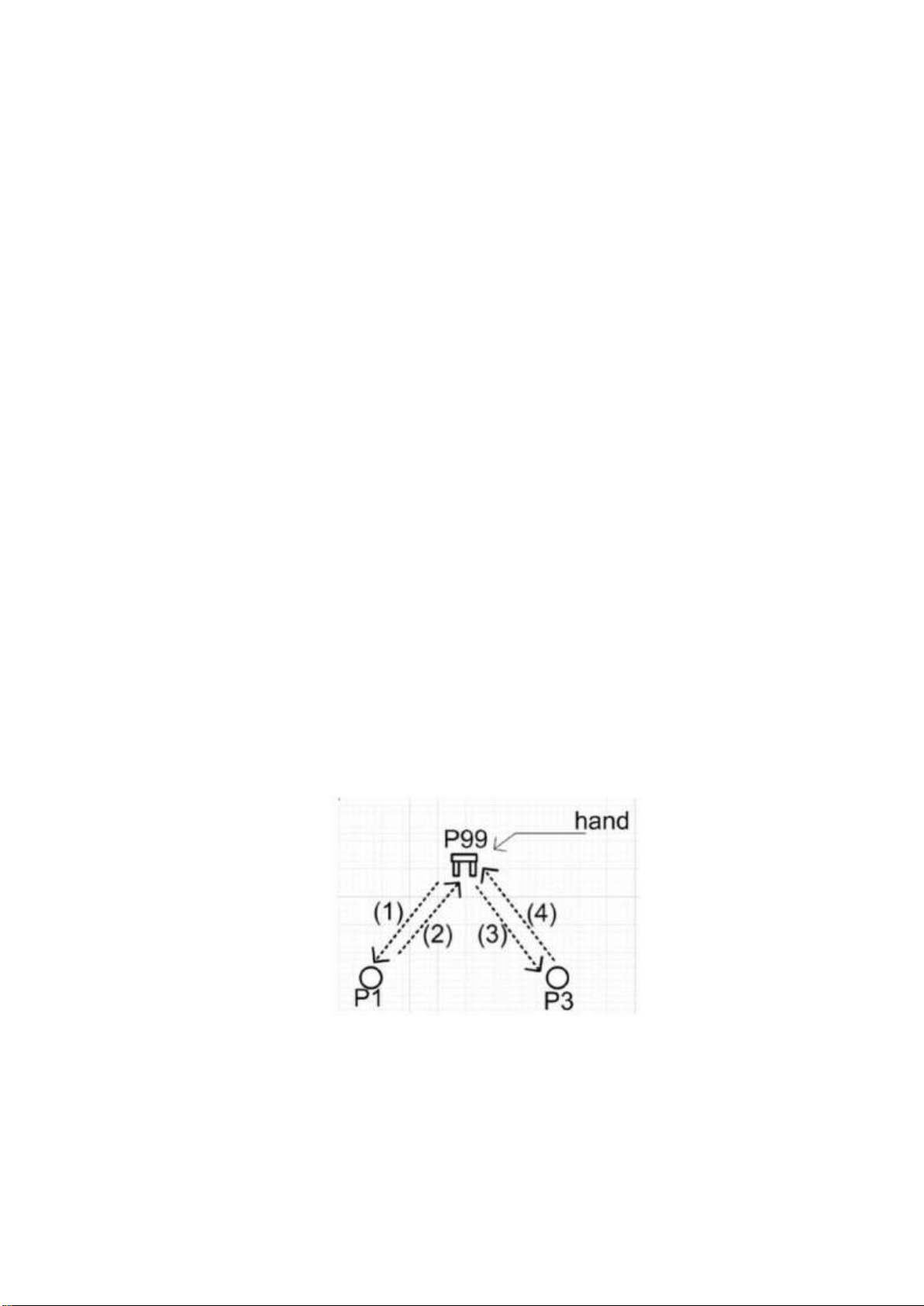
(1)Điều khiển cánh tay robot từ vị trí đầu P99 xuống P1. Tại P1 dừng lại 2s và
thực hiện đóng tay kẹp tại P1. 9
Downloaded by Anh Tr?n (anhtrann1406200@gmail.com) lOMoAR cPSD| 48541417
(2)Điều khiển cánh tay robot từ P1 về lại P99.
(3)Điều khiển cánh tay robot từ vị trí đầu P99 xuống P3. Dừng lại 1s và thực
hiện mở tay kẹp tại P3.
(4)Điều khiển cánh tay từ P3 về lại P99.
Lệnh sử dụng cơ bản: MOV, Dly, MVS, HClose, HOPEN.
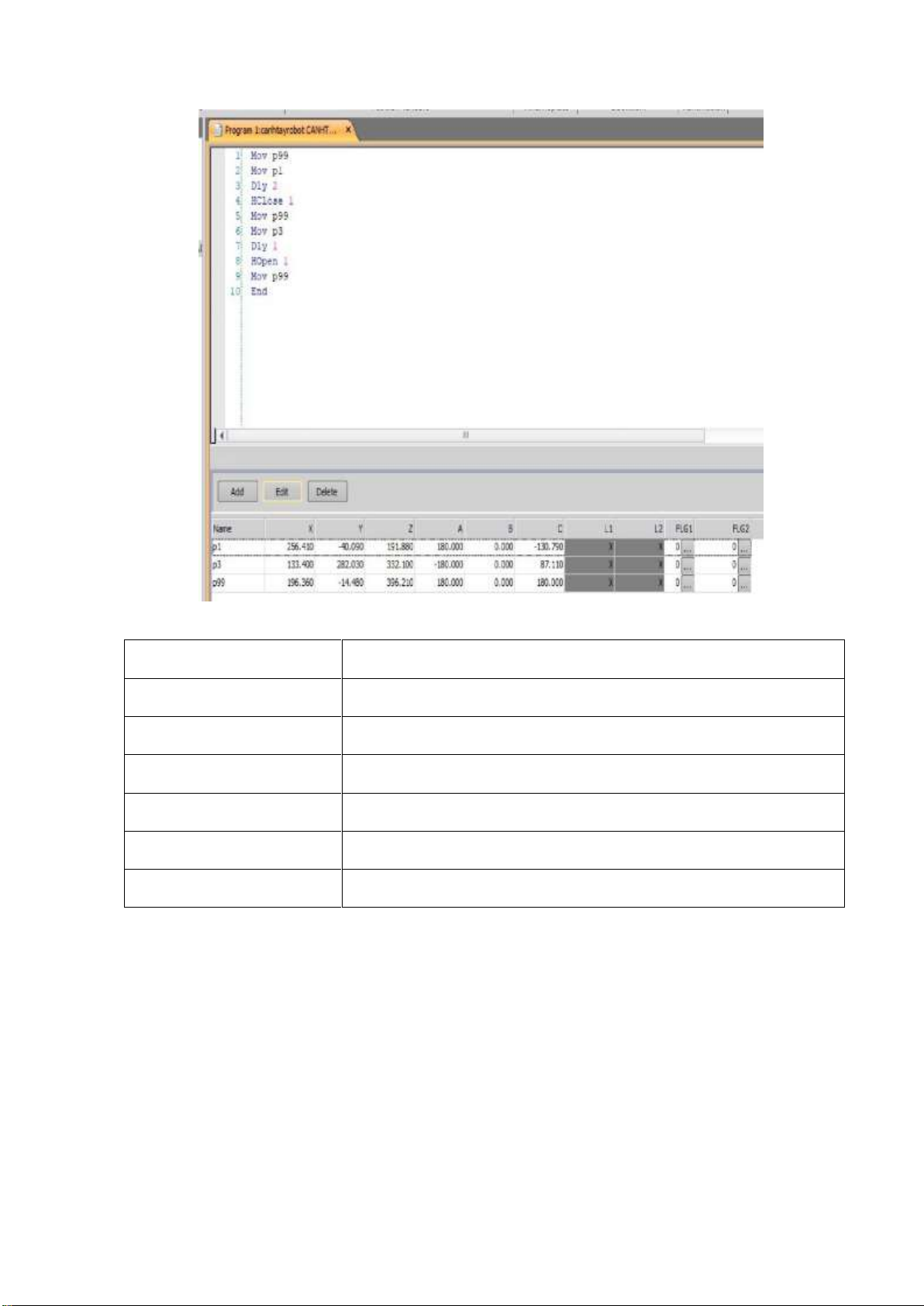
V tọa độ điểm các điểm như sau P99:
(X=+196.36; Y=-14.48; Z=+396.21; A=+180.00; B=+0.00; C=180.00) P1
(X=+256.41; Y=-40.09; Z=+191.88; A=+180.00; B=+0.00; C=-130.79) P3
( X=+133.4; Y=282.03; Z=+332.1; A=-180.00; B=+0.00; C =87.11) * Các bước thực hiện
Bước 1: Khởi động phần mềm RToolbox
Bước 2: Thực hiện thiết lập và kết nối cho Robot như hướng dẫn trong tài liệu thực hành
Bước 3: Lập trình theo yêu cầu bài toán 10 Downloaded by Anh Tr?n (anhtrann1406200@gmail.com) lOMoAR cPSD| 48541417
- Gải thích các câu lệnh được sử dụng : Lệnh Gải thích Servo On
Bật động cơ cử động của cánh tay Mov
Di chuyển khâu tác động cuối đến điểm chỉ định Dly
Cánh tay trì hoãn 1 khoảng thời gian chỉ định HClose Đóng tay kẹp HOpen Mở tay kẹp End Kết thúc chương trình
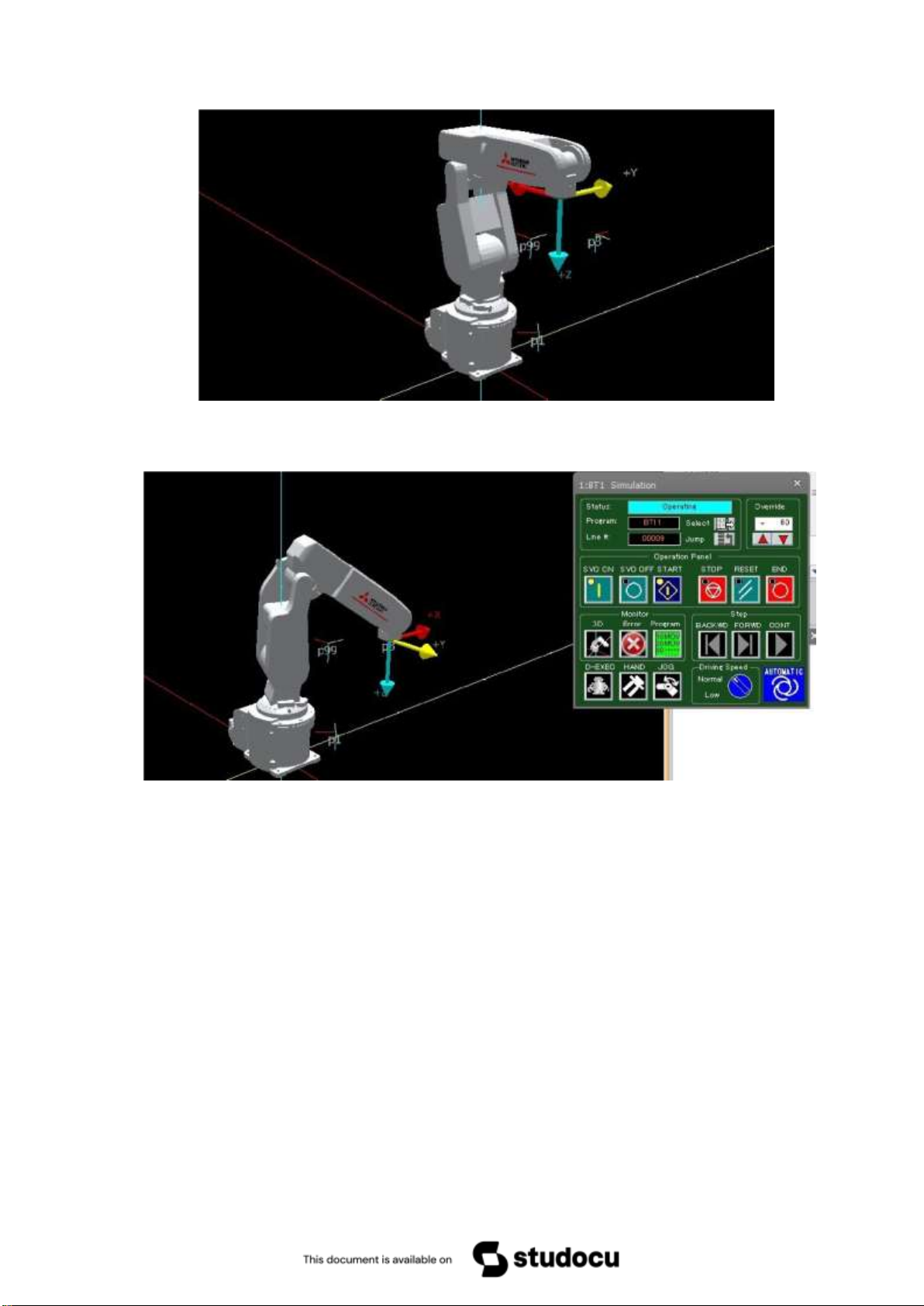
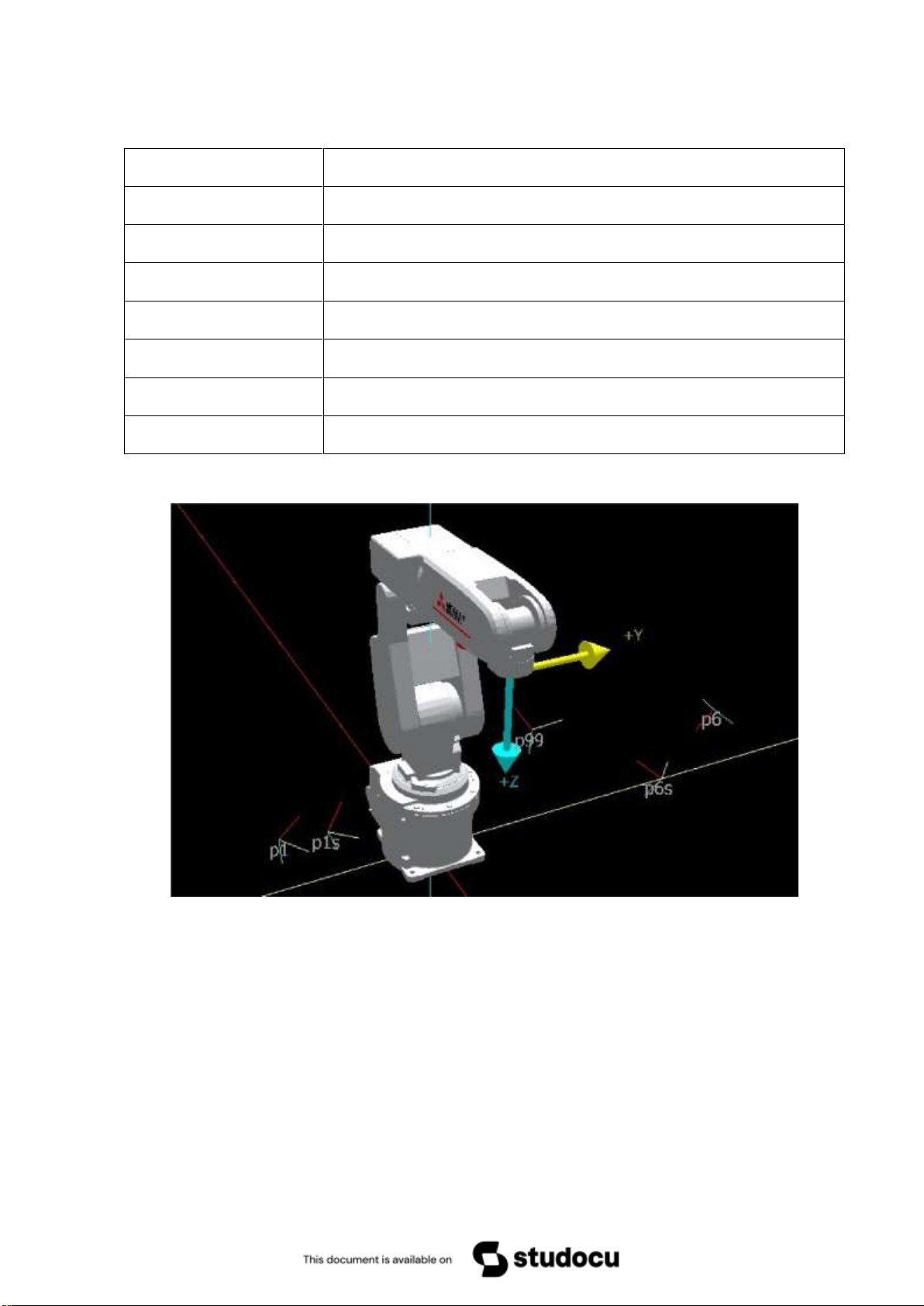
- Vị trí của các điểm trên không gian làm việc của cánh tay Robot 11
Downloaded by Anh Tr?n (anhtrann1406200@gmail.com) lOMoAR cPSD| 48541417
* Kết quả thực hành:
Bài 2: Lập Trình Mô Phỏng Canh Tay Robot Theo Tọa Độ Riêng
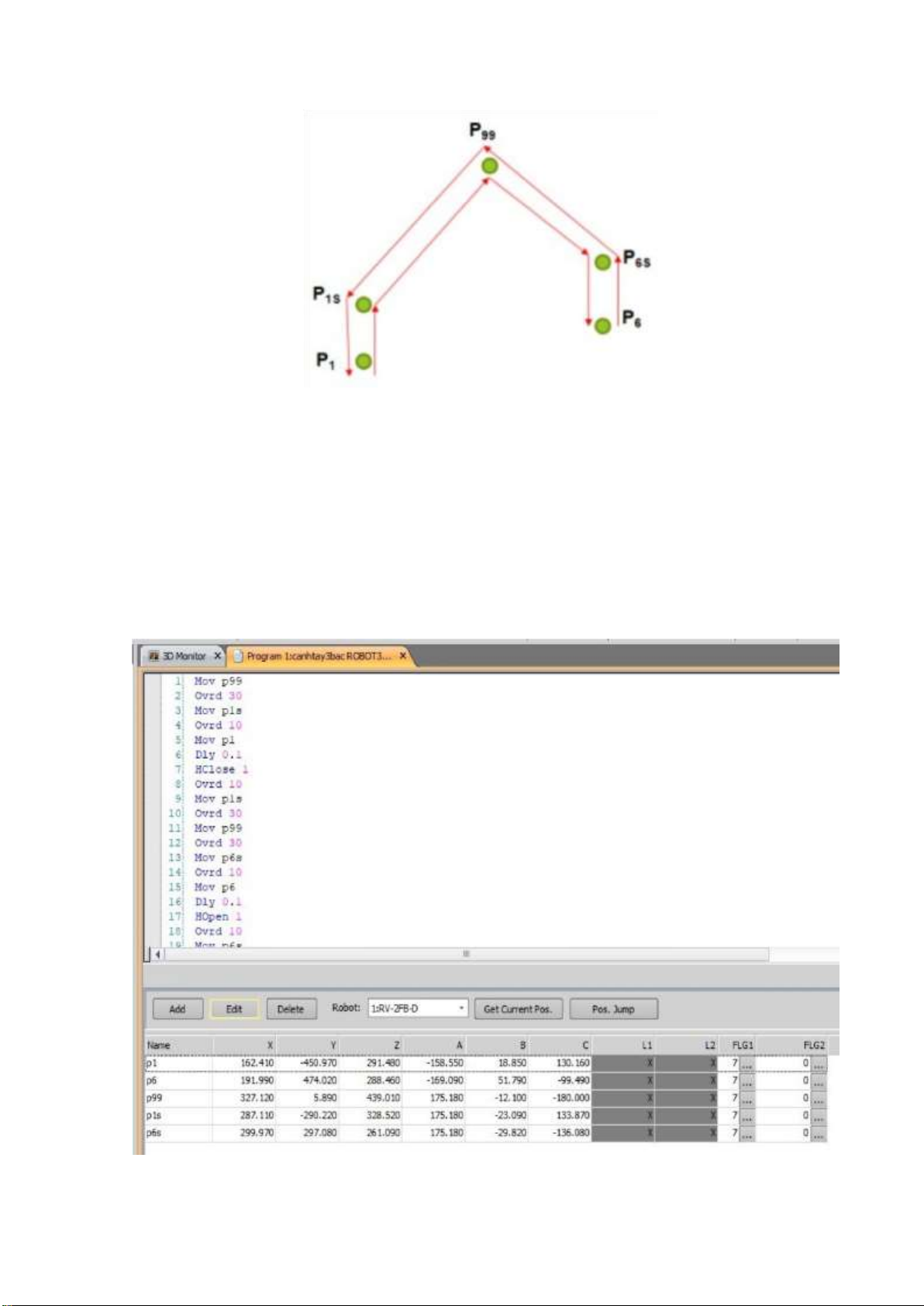
Khi phát hiện có phôi, tay máy di chuyển từ điểm P99 ( khởi tạo ban đầu) đến điểm P1S
(an toàn gắp phôi) với tốc độ 30%, sau đó di chuyển đến điểm P1 ( gắp phôi) với tốc độ
10%, sau 0.1s và đóng tay kẹp để kẹp phôi, quay lại điểm P1s vẫn với tốc độ 10%, quay
lại điểm P99 với tốc độ 30%, di chuyển đến điểm P6S ( an toàn nhả phôi ) vẫn với tốc
độ 30%, di chuyển đến điểm P6 ( nhả phôi) với tốc độ 10%, sau 0.1s và mở tay kẹp để
nhả phôi, quay lại điểm P6S vẫn với tốc độ 10%, quay lại điểm P99 với tốc độ 30%.
Cho tọa độ các điểm như sau: 12 Downloaded by Anh Tr?n (anhtrann1406200@gmail.com) lOMoAR cPSD| 48541417
* Các bước thực hiện:
Bước 1: Khởi động phần mềm RToolbox
Bước 2: Thực hiện thiết lập và kết nối cho Robot như hướng dẫn trong tài liệu thực hành
Bước 3: Lập trình theo yêu cầu bài toán 13
Downloaded by Anh Tr?n (anhtrann1406200@gmail.com) lOMoAR cPSD| 48541417
- Gải thích các câu lệnh được sử dụng : Lệnh Gải thích Servo On
Bật động cơ cử động của cánh tay Mov
Di chuyển khâu tác động cuối đến điểm chỉ định Dly
Cánh tay trì hoãn 1 khoảng thời gian chỉ định HClose Đóng tay kẹp HOpen Mở tay kẹp End Kết thúc chương trình Ovrd
Xét tốc độ động cơ Robot
- Vị trí của các điểm trên không gian làm việc của cánh tay Robot 14 Downloaded by Anh Tr?n (anhtrann1406200@gmail.com) lOMoAR cPSD| 48541417
* Kết quả thực hành:
BÀI 3: ĐIỀU KHIỂN VẬN HÀNH ROBOT AERV3 SỬ DỤNG TEACH PENDANT
3.1. Mục đích thực hành
- Nắm rõ cách lập trình vận hành cho AERV3 bằng Máy tính bảng.
- Thiết kế bài toán thực hành cho Robot AERV3.
- Viết chương trình ghi trong máy tính bảng và vận hành.
3.2. Thiết bị thực hành 1) Thân cơ khí robot AERV3
2) Bộ điều khiển robot AERV3
3) Máy tính bảng đã cài đặt chương trình điều khiển Robot AERV3
4) Băng tải thẳng, mẫu vật. 5) Bơm hơi điện 15
Downloaded by Anh Tr?n (anhtrann1406200@gmail.com) lOMoAR cPSD| 48541417
6) Tài liệu hướng dẫn thực hành 3.3. Tổng quan
Ta sẽ sử dụng Teach Pendant là một máy tính bảng chạy trên nền hệ điều hành
Android để điều khiển vận hành robot AERV3. Phần mềm đã được cài sẵn trên
thiết bị được cung cấp bởi nhà sản xuất 3.4. Thực hành
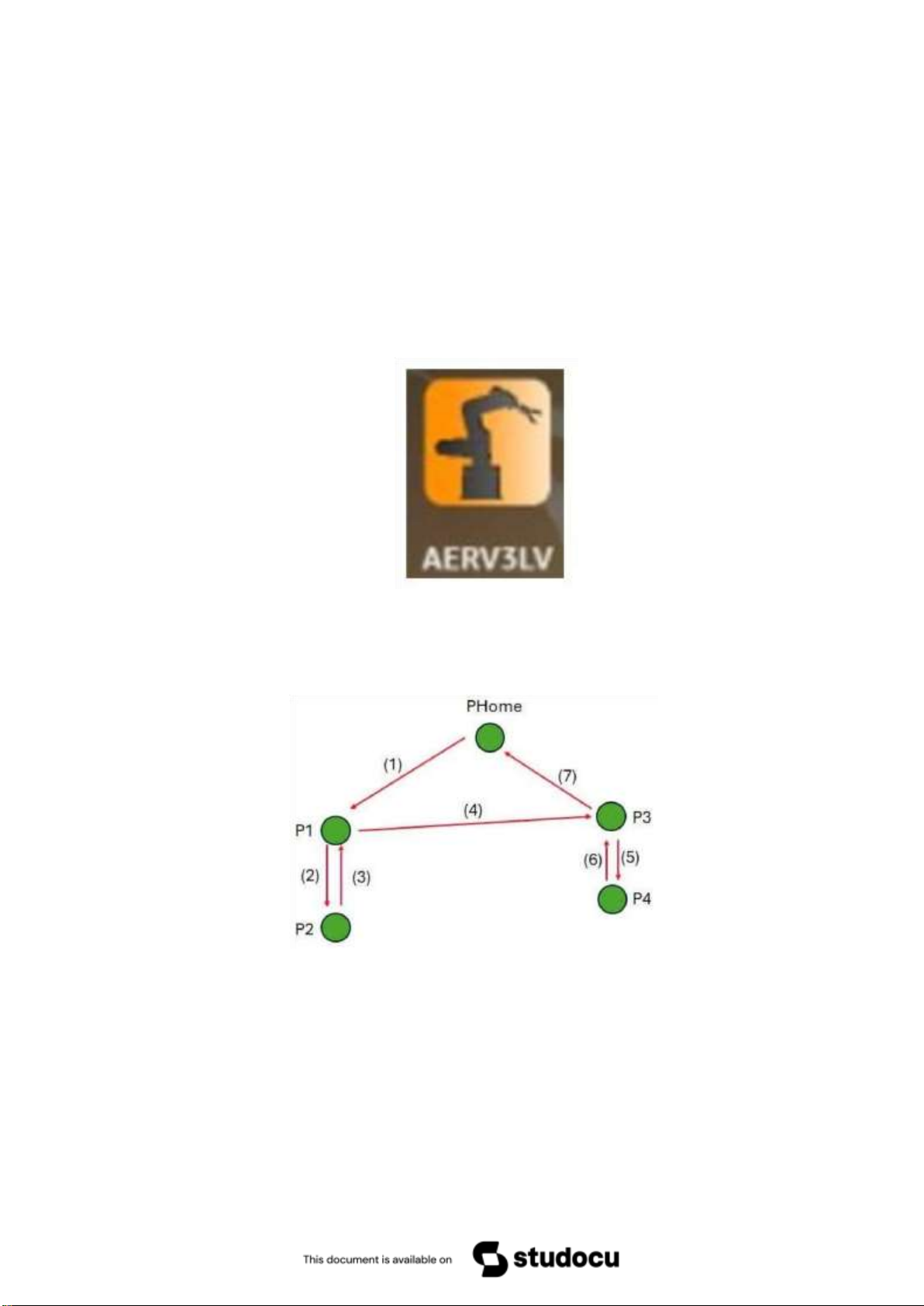
Bước 1: Xây dựng bài toán vận hành
(1) Khi phát hiện có phôi, tay máy di chuyển từ điểm PHome (khởi tạo ban đầu)
đến điểm P1 (an toàn gắp phôi) và mở tay kẹp.
(2) Di chuyển đến điểm P2 (gắp phôi) và đóng tay kẹp để kẹp phôi. (3) Quay lại điểm P1. 16 Downloaded by Anh Tr?n (anhtrann1406200@gmail.com) lOMoAR cPSD| 48541417
(4) Di chuyển đến điểm P3.
(5) Di chuyển đến điểm P4 (nhả phôi) và mở tay kẹp để nhả phôi. (6) Quay lại điểm P3 . (7) Quay lại điểm PHome.
Bước 2: Thực hiện kết nối giữa Robot AERV3 và máy tính bảng tính bảng dựa
theo hướng dẫn trong tài liệu thực hành. 17
Downloaded by Anh Tr?n (anhtrann1406200@gmail.com) lOMoAR cPSD| 48541417
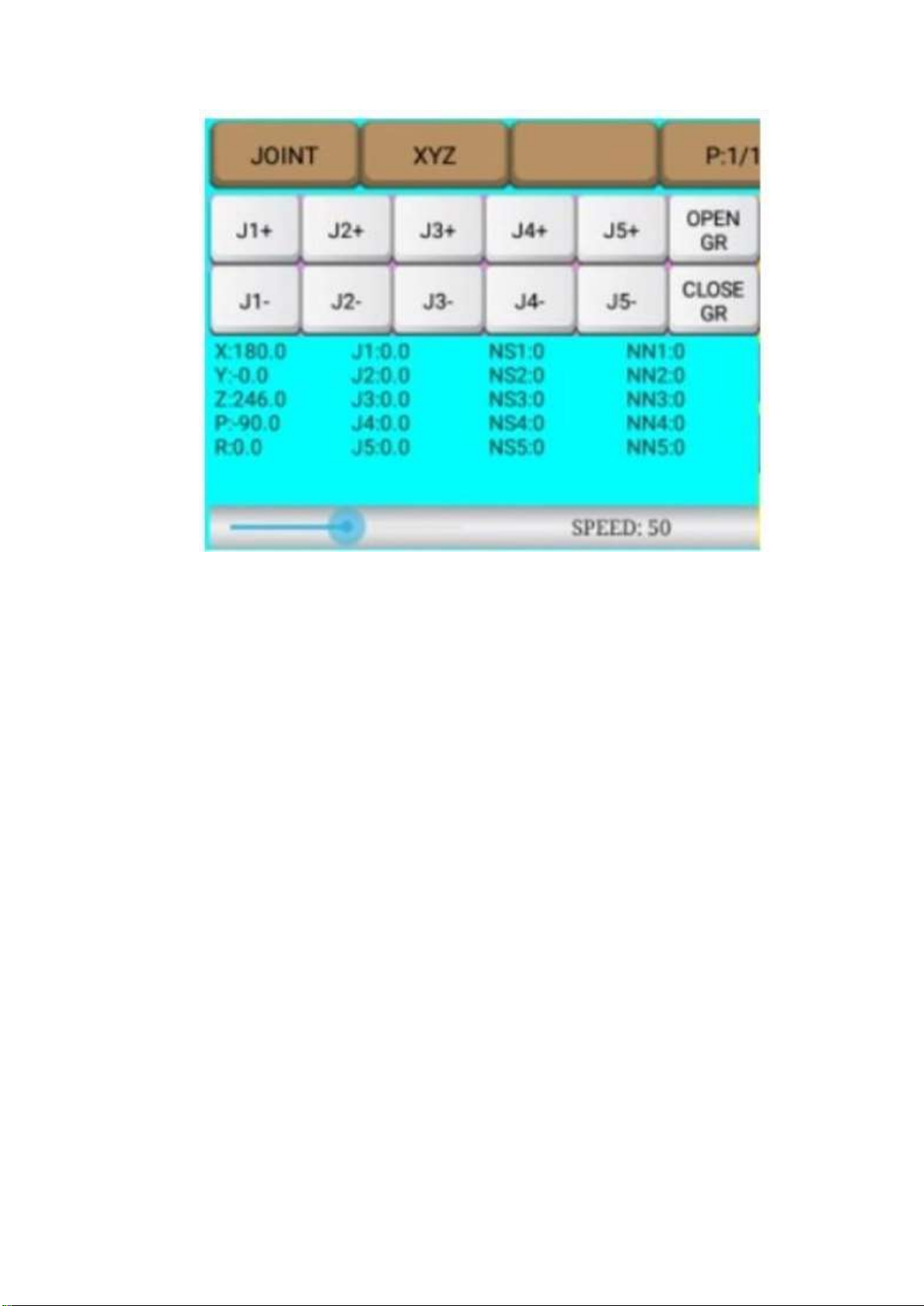
Giao diện làm việc trên máy tính bảng khi kết nối thành công
Bước 3: Thao tác với điểm hoạt động (POINTS)
- Di chuyển Robot đến vị trí muốn lưu tọa độ bằng vùng điều khiểm JOG 18 Downloaded by Anh Tr?n (anhtrann1406200@gmail.com) lOMoAR cPSD| 48541417
Vùng điều khiển JOG
- Sau đó nhấn nút NEW ở cột POINT, khi xuất hiện hộp thoại ta đặt tên cho điểm vừa mới tạo.
- Lần lượt xét tọa độ các điểm cần lưu theo bài toán đã xây dựng, từ đó ta được các điểm: P1, P2, P3, P4
Bước 4: Thực hiện viết chương trình điều khiển cho bài toán 1) FLAG N10 2) MOVEV P1 V25 3) OPENGR 4) MOVEV P2 V25 5) WAIT T1 6) CLOSEGR 19
Downloaded by Anh Tr?n (anhtrann1406200@gmail.com)
Tài liệu liên quan:
-

Tourniquet Test (Capillary Fragility) môn Accounting principle | Học viện Nông nghiệp Việt Nam
166 83 -

Model SOP Standard Operating Procedure môn Accounting principle | Học viện Nông nghiệp Việt Nam
191 96 -

Book Review: The Alchemist - must-read book or just an exaggeration? môn Accounting principle | Học viện Nông nghiệp Việt Nam
288 144 -

Miss finger !" He gave her an exasperated look and then said what "ex-officer" was môn Accounting principle | Học viện Nông nghiệp Việt Nam
172 86 -

Road tree andherdthe main source of moisture to supportHerdertree'splantation at the edge of the forest. môn Accounting principle | Học viện Nông nghiệp Việt Nam
170 85