Chapter 2: Intelligent Agents | Đại Học Nội Vụ Hà Nội
Fixed performance measure evaluates the environment sequence – one point per square cleaned up in time T? – one point per clean square per time step, minus one per move? – penalize for > k dirty squares? Chapter 2: Intelligent Agents | Đại Học Nội Vụ Hà Nội. Tài liệu được sưu tầm gồm 32 trang, giúp bạn tham khảo, ôn tập và đạt kết quả cao!
Môn: Trí tuệ nhân tạo(huha) 11 tài liệu
Trường: Trường Đại Học Nội Vụ Hà Nội 1.4 K tài liệu
Tác giả:

Preview text:
lOMoAR cPSD|5906219 0 Chapter 2: Intelligent Agents Reminders:
Assignment 0 (lisp refresher) due 1/28
Lisp/emacs/AIMA tutorial: 11-1 today and Monday, 271 Soda Outline: ♦ Agents and environments ♦ Ra onality
♦ PEAS (Performance measure, Environment, Actuators, Sensors) ♦ Environment types ♦ Agent types Chapter 2 Chapter 2 1 lOMoAR cPSD|590621 90 Agents and environments
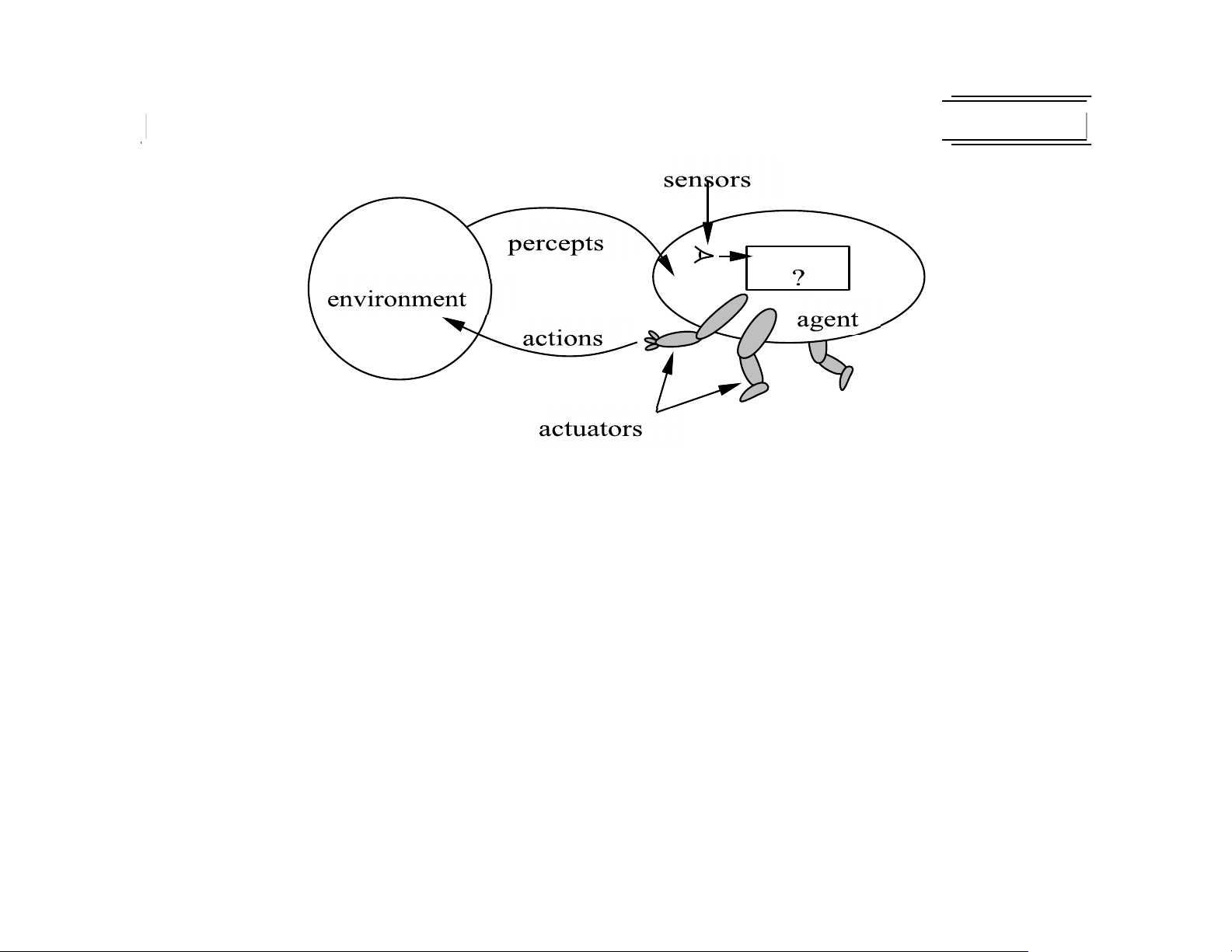
Agents include humans, robots, so bots, thermostats, etc.
The agent func on maps from percept histories to ac ons: f : P∗ →A
The agent program runs on the physical architecture to produce f Chapter 2 2 lOMoAR cPSD|590621 90 Vacuum-cleaner world B A
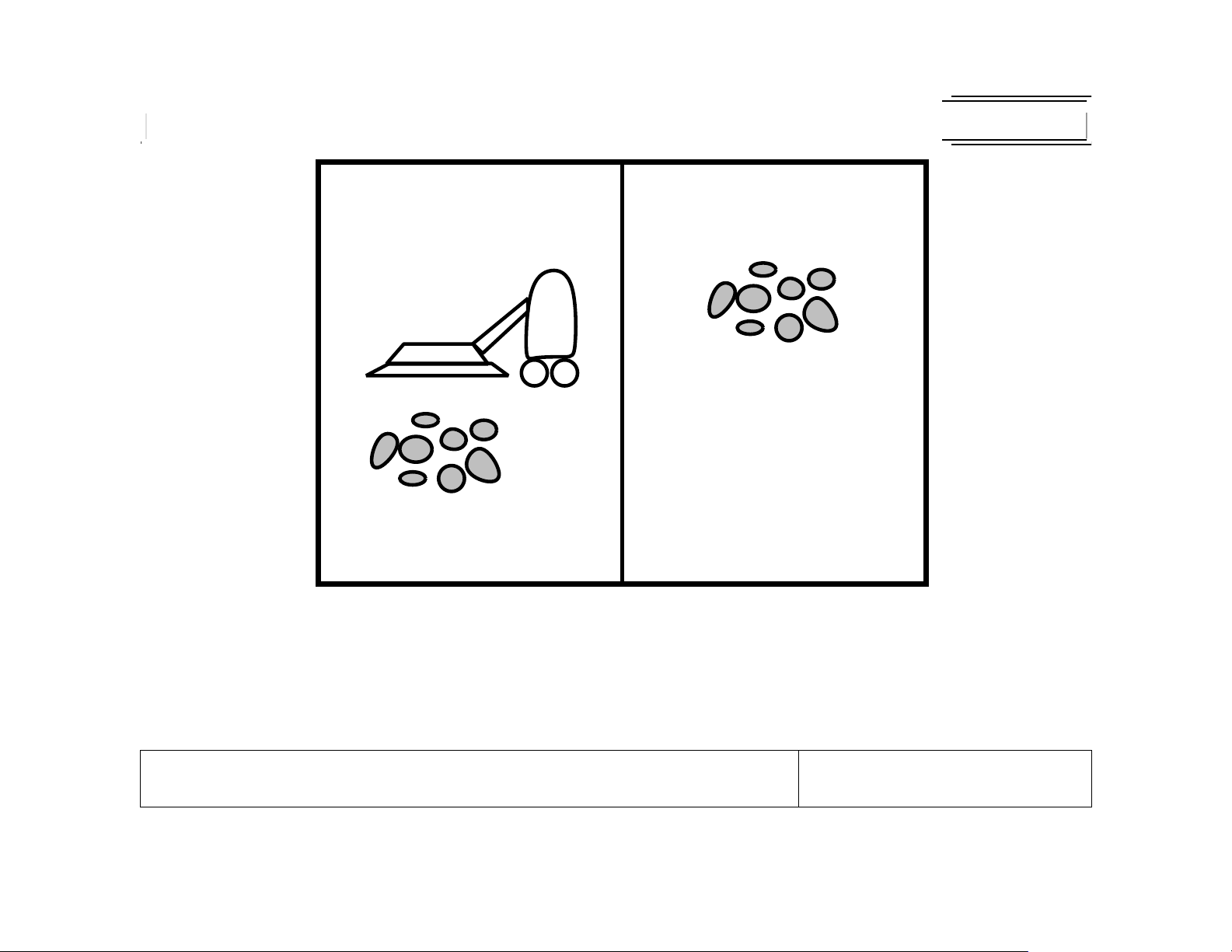
Percepts: loca on and contents, e.g., [A,Dirty]
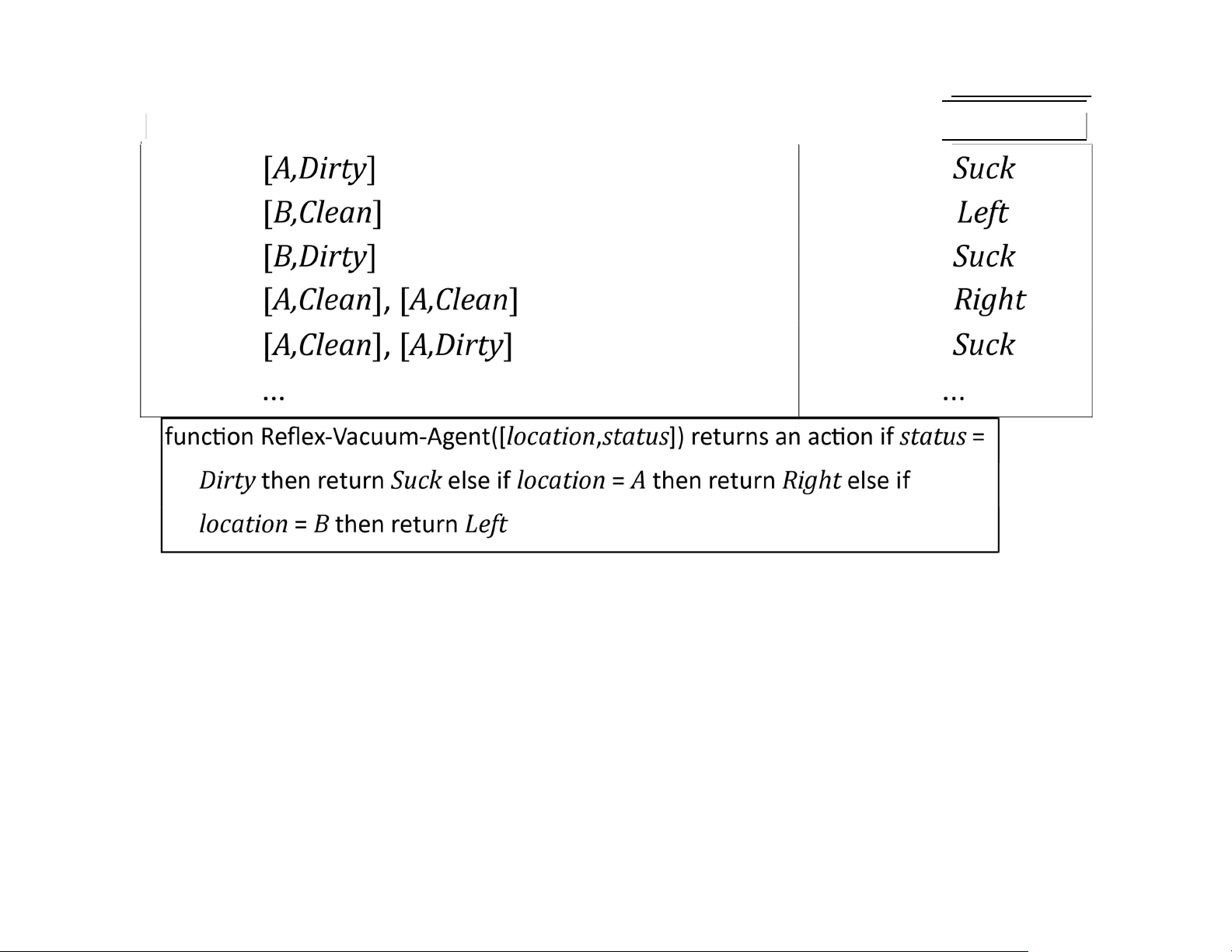
Ac ons: Left, Right, Suck, NoOp A vacuum-cleaner agent Percept sequence Ac on Chapter 2 3 lOMoAR cPSD|590621 90 [A,Clean] Right 4 lOMoAR cPSD|590621 90 What is the right func on?
Can it be implemented in a small agent program? Chapter 2 5 lOMoAR cPSD|590621 90 Rationality
Fixed performance measure evaluates the environment
sequence – one point per square cleaned up in me T? – one
point per clean square per me step, minus one per move? –
penalize for > k dirty squares?
A ra onal agent chooses whichever ac on maximizes the expected value
of the performance measure given the percept sequence to date Ra onal =6 omniscient
– percepts may not supply all relevant informa on Ra onal =6 clairvoyant
– ac on outcomes may not be as expectedHence, ra onal =6 successful Chapter 2 6 lOMoAR cPSD|590621 90
Ra onal ⇒ explora on, learning, autonomy PEAS
To design a ra onal agent, we must specify the task environment
Consider, e.g., the task of designing an automated taxi: Performance measure?? Environment?? Actuators?? Sensors?? Chapter 2 7 lOMoAR cPSD|590621 90 PEAS
To design a ra onal agent, we must specify the task environment
Consider, e.g., the task of designing an automated taxi:
Performance measure?? safety, des na on, profits, legality, comfort, ...
Environment?? US streets/freeways, traffic, pedestrians, weather, ...
Actuators?? steering, accelerator, brake, horn, speaker/display, ...
Sensors?? video, accelerometers, gauges, engine sensors, keyboard, GPS, ... Chapter 2 8 lOMoAR cPSD|590621 90 Internet shopping agent Performance measure?? Environment?? Actuators?? Sensors?? Chapter 2 9 lOMoAR cPSD|5906219 0 Internet shopping agent
Performance measure?? price, quality, appropriateness, efficiency
Environment?? current and future WWW sites, vendors, shippers Chapter 2 10 lOMoAR cPSD|590621 90 Environment types
Actuators?? display to user, follow URL, fill in form
Sensors?? HTML pages (text, graphics, scripts) Chapter 2 11 lOMoAR cPSD|5906219 0
Solitaire Backgammon Internet shopping Taxi Observable?? Determinis c?? Episodic?? Sta c?? Discrete?? Chapter 2 12 lOMoAR cPSD|590621 90 Environment types Single-agent?? Chapter 2 13 lOMoAR cPSD|5906219 0 Environment types
Solitaire Backgammon Internet shopping Taxi Observable?? Yes Yes No No Determinis c?? Episodic?? Sta c?? Discrete?? Single-agent?? Chapter 2 14 lOMoAR cPSD|590621 90 Chapter 2 15 lOMoAR cPSD|590621 90 Environment types
Solitaire Backgammon Internet shopping Taxi Observable?? Yes Yes No No Chapter 2 16 lOMoAR cPSD|590621 90 Determinis c?? Yes No Partly No Episodic?? Sta c?? Discrete?? Single-agent?? Environment types
Solitaire Backgammon Internet shopping Taxi Chapter 2 17 lOMoAR cPSD|590621 90 Observable?? Yes Yes No No Determinis c?? Yes No Partly No Episodic?? No No No No Sta c?? Discrete?? Single-agent?? Environment types Chapter 2 18 lOMoAR cPSD|590621 90
Solitaire Backgammon Internet shopping Taxi Observable?? Yes Yes No No Determinis c?? Yes No Partly No Episodic?? No No No No Sta c?? Yes Semi Semi No Discrete?? Single-agent?? Chapter 2 19 lOMoAR cPSD|590621 90 Environment types
Solitaire Backgammon Internet shopping Taxi Observable?? Yes Yes No No Determinis c?? Yes No Partly No Episodic?? No No No No Sta c?? Yes Semi Semi No Chapter 2 20
Tài liệu liên quan:
-

Ứng dụng về AI trong vận hành và chuỗi cung ứng môn Trí tuệ nhân tạo | Trường Đại Học Nội Vụ Hà Nội
23 12 -

Based Decomposition and Classification | Đại Học Nội Vụ Hà Nội
162 81 -
Chapter 1: Artificial Intelligence | Đại Học Nội Vụ Hà Nội
148 74 -
Chapter 4a: Informed search algorithms | Đại Học Nội Vụ Hà Nội
138 69