Đề cương ôn tập cuối kỳ_K64
Preview text:
Câu hỏi ôn tập cuối kỳ
Môn học: Hệ thống cơ điện tử Phần lý thuyết:
Câu 1: Nêu các khái niệm về hệ thống cơ điện tử? Cho ví dụ hệ thống cơ điện tử.
Câu 2: Sơ đồ cấu trúc hệ thống cơ điện tử? Nêu các phần tử cơ bản cấu thành nên hệ thống cơ điện tử?
Câu 3: Ứng dụng của hệ thống cơ điện tử?
Câu 4: Khái niệm mô hình, mô hình hóa, mô phỏng? Ý nghĩa của mô hình hóa trong hệ
thống cơ điện tử? Cho một số ví dụ về mô hình hóa hệ cơ điện tử?
Câu 5: Quá trình mô hình hóa – nhiệm vụ và kết quả?
Câu 6: Trình bày phương pháp mô hình hóa được sử dụng phổ biến?
Câu 7: Khái niệm cơ cấu dẫn động? Nêu các dạng công suất trên hệ thống Cơ điện tử?
Câu 8: Có mấy loại cơ cấu dẫn động? Nêu khái niệm, ưu - nhược điểm của cơ cấu dẫn động điện từ?
Câu 9: Trình bày cấu tạo, nguyên lý hoạt động của động cơ bước? Các góc quay một
bước của động cơ bước thường sử dụng?
Câu 10: Trình bày các bộ phận chính của cơ cấu dẫn động thủy lực? Ưu nhược điểm của
cơ cấu dẫn động thủy lực?
Câu 11: Trình bày các bộ phận chính của cơ cấu dẫn động khí nén? Ưu nhược điểm của
cơ cấu dẫn động khí nén?
Câu 12: Trình bày thông số cơ bản của Atmega 328P trong arduino Uno R3?
Câu 13: Vi điều khiển được ứng dụng trong hệ thống cơ điện tử như thế nào? Cho ví dụ
về tín hiệu số, tín hiệu tương tự?
Câu 14: Trình bày các đơn vị mã hoá, chuyển đổi số 789 (hệ cơ số 10) sang cơ số 2, 8, 16, BCD?
Câu 15: Ngõ ra analog 0-5V với độ phân giải 16 bit, tính giá trị ADC khi ngõ ra là 3V
và chuyển đổi giá trị ADC này sang hệ 8 bit, BCD? Phần bài tập Bài tập 1:
Hệ thống gồm: 01 bo mạch Arduino Uno R3, 03 Led đơn (led1, led2, led3), 03 điện trở 220 Ω
hoạt động lặp lại liên tục theo các bước như sau: ban đầu led1 và led3 sáng, led2 tắt trong
khoảng thời gian 500ms; tiếp theo led1 và led3 tắt, led2 sáng trong khoảng thời gian 300ms.
a) Vẽ sơ đồ nguyên lý mạch điện của hệ thống trên.
b) Viết chương trình điều khiển cho Arduino để hệ thống hoạt động theo yêu cầu như trên. Bài tập 2:
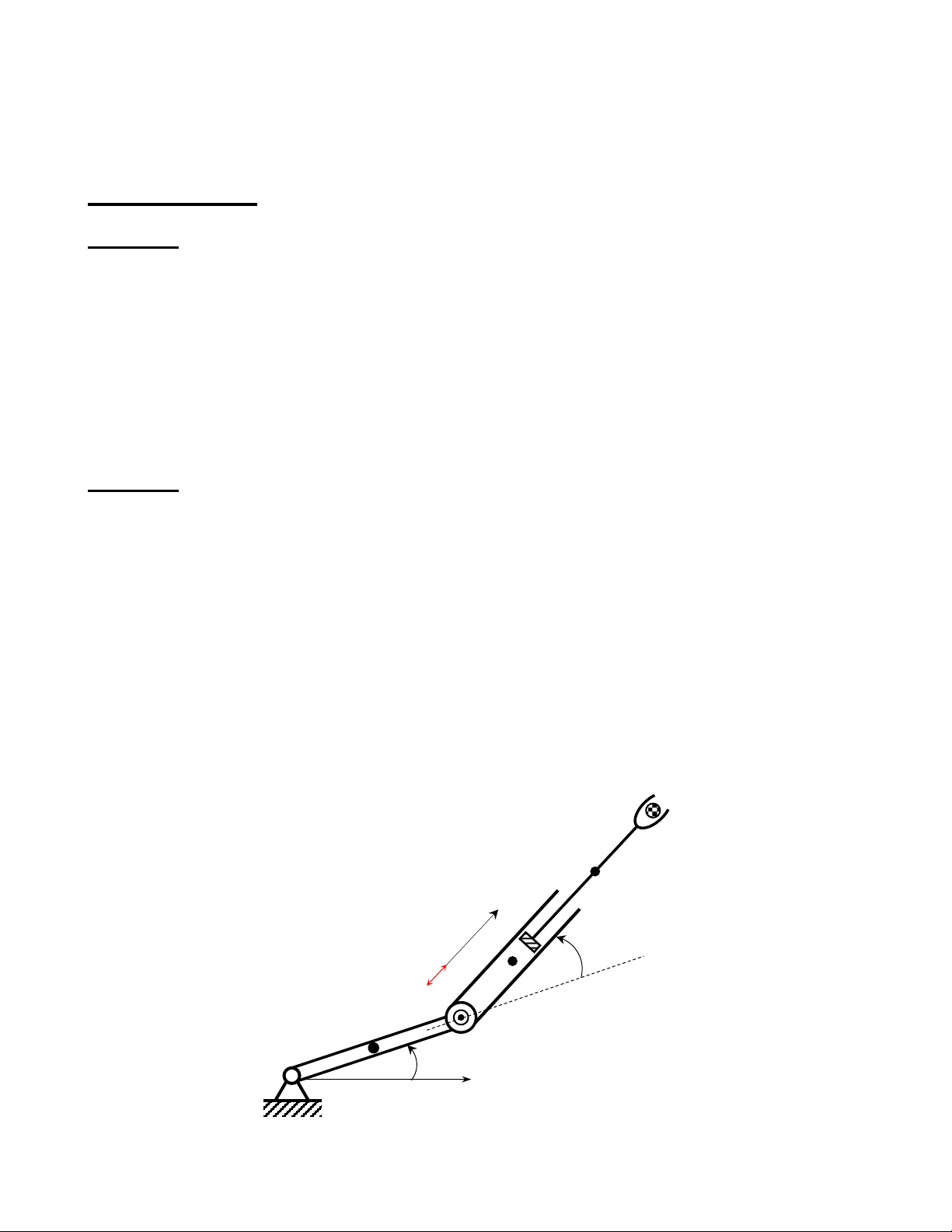
Cho mô hình robot phẳng ba bậc tự do như hình
1. Đặt hệ toạ độ cho robot theo phương pháp DHC
2. Xác định vị trí và vận tốc điểm thao tác E theo phương pháp giải tích
3. Xác định bộ thông số Denavit-Hartenberg-Craig 0
4. Tìm ma trận chuyển đổi thuần nhất Tn .
5. Viết phương trình lagrange 2 – phương trình vi phân chuyển động của robot E C 3 B q D 3 q 2 l 0 C 2 C 1 a 1 A O q 1