Đề cương ôn tập môn Lý thuyết cơ cấu | Trường Đại học Công nghiệp Hà Nội
Đề cương ôn tập môn Lý thuyết cơ cấu | Trường Đại học Công nghiệp Hà Nội. Tài liệu được sưu tầm giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem.
Môn: Cơ sở dữ liệu ( DCN ) 5 tài liệu
Trường: Trường Đại học Công nghiệp Hà Nội 49 tài liệu
Tác giả:
Preview text:
lOMoARcPSD|51118871
ĐỀ CƯƠNG LÝ THUYẾT CƠ CẤU
Lý thuyết cơ cấu (Trường Đại học Công nghiệp Hà Nội) Scan to open on Studeersnel
Studocu is not sponsored or endorsed by any college or university
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871
ĐỀ CƯƠNG ÔN TẬP MÔN LÝ THUYẾT CƠ CẤU PHẦN 1: LÝ THUYẾT 1.
Chọn phát biểu đúng về chi tiết máy:
A. Máy hay cơ cấu có nhiều bộ phận khác nhau, mỗi bộ phận khác nhau được gọi là chi tiết máy.
B. Máy hay cơ cấu có thể tháo rời ra thành nhiều bộ phận khác nhau, bộ phận không
thể tháo rời ra nhỏ hơn được nữa gọi là chi tiết máy.
C. Máy hay cơ cấu có nhiều bộ phận chuyển động tương đối đối với nhau, mỗi bộ phận
đó gọi là chi tiết máy.
D. Máy hay cơ cấu gồm nhiều khâu chuyển động liên kết tạo thành, mỗi khâu chuyển
động gọi là chi tiết máy. 2.
Chọn phát biểu sai. Bậc tự do của khâu là:
A. Số khả năng chuyển động độc lập có thể có của khâu.
B. Số thông số độc lập cần thiết để xác định vị trí bất kỳ của khâu.
C. Số chuyển động có thể có của khâu.
D. Số tham số tối thiểu cần phải biết để xác định vị trí bất kỳ của khâu. 3.
Bậc tự do của khâu là:
A. Thông số cần thiết để xác định vị trí bất kỳ của khâu.
B. Số tham số để xác định vị trí bất kỳ của khâu.
C. Số chuyển động có thể có của khâu.
D. Số khả năng chuyển động độc lập có thể có của khâu. 4.
Bậc tự do của cơ cấu là:
A. Số thông số độc lập cần thiết để xác định vị trí bất kỳ của cơ cấu.
B. Khả năng chuyển động độc lập của cơ cấu.
C. Tham số để xác định vị trí của cơ cấu.
D. Số khả năng chuyển động độc lập của khâu dẫn. 1
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871 5.
Phân loại khớp động theo số bậc tự do bị hạn chế, ta có:
A. Khớp loại cao và khớp loại thấp.
B. Khớp loại 1, khớp loại 2, khớp loại 3, khớp loại 4 và khớp loại 5.
C. Khớp trượt, khớp quay và khớp bản lề.
D. Khớp tiếp xúc điểm, khớp tiếp xúc đường và khớp tiếp xúc mặt. 6.
Chọn phát biểu sai. Bậc tự do của cơ cấu là:
A. Số khả năng chuyển động độc lập của cơ cấu.
B. Số thông số độc lập cần thiết để xác định vị trí bất kỳ của cơ cấu.
C. Số chuyển động có thể có của cơ cấu.
D. Số tham số tối thiểu cần phải biết để xác định vị trí bất kỳ của cơ cấu. 7.
Chọn phát biểu đúng về khớp động:
A. Khớp loại 1 có 1 chuyển động bị hạn chế.
B. Khớp loại 1 có 5 chuyển động bị hạn chế.
C. Khớp trượt, khớp quay và khớp bản lề có 1 chuyển động bị hạn chế.
D. Tiếp xúc điểm, tiếp xúc đường và tiếp xúc mặt là đặc tính của khớp loại cao. 8.
Chọn phát biểu sai về khớp động:
A. Khớp loại 1 có 1 chuyển động bị hạn chế.
B. Khớp loại 5 có 5 chuyển động bị hạn chế.
C. Khớp trượt, khớp quay và khớp bản lề có 5 chuyển động bị hạn chế.
D. Tiếp xúc điểm, tiếp xúc đường và tiếp xúc mặt là đặc tính của khớp loại cao. 9.
Chọn phát biểu sai về ràng buộc trong cơ cấu:
A. Ràng buộc gián tiếp là ràng buộc sinh ra giữa 2 khâu thông qua các khâu khác.
B. Ràng buộc trực tiếp là ràng buộc sinh ra giữa 2 khâu liên kết trực tiếp với nhau mà
không thông qua các khâu khác.
C. Ràng buộc trực tiếp và ràng buộc gián tiếp sinh ra trực tiếp giữa 2 khâu.
D. Ràng buộc trùng là ràng buộc chỉ có ở những cơ cấu đóng kín. 2
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871 10. Khớp bản lề:
A. Có 3 chuyển động quay và 2 chuyển động tịnh tiến bị hạn chế.
B. Có 1 chuyển động tịnh tiến bị hạn chế.
C. Có 3 chuyển động tịnh tiến và 2 chuyển động quay bị hạn chế.
D. Có 1 chuyển động quay bị hạn chế. 11.
Chọn phát biểu đúng về bậc tự do bị hạn chế:
A. Khớp loại 5 có 5 chuyển động bị hạn chế.
B. Khớp loại 5 có 5 chuyển động.
C. Khớp loại 5 có 2 chuyển động bị hạn chế.
D. Khớp loại 5 có 3 chuyển động quay, 2 chuyển động tịnh tiến bị hạn chế. 12.
Chọn phát biểu sai về bậc tự do bị hạn chế:
A. Khớp cầu có chốt có 3 chuyển động bị hạn chế.
B. Khớp loại 2 có 2 chuyển động bị hạn chế.
C. Khớp tịnh tiến có 5 chuyển động bị hạn chế.
D. Khớp cơ cấu cam có 4 chuyển động bị hạn chế. 13. Chọn phát biểu đúng:
A. Khớp cầu có 3 chuyển động tịnh tiến.
B. Khớp cầu có một chuyển động tịnh tiến, 2 chuyển động quay.
C. Khớp cầu có 3 chuyển động bị hạn chế.
D. Khớp cầu là khớp loại cao. 14.
Chọn phát biểu sai về khớp động:
A. Khớp loại 5 chỉ thực hiện được 1 chuyển động.
B. Khớp trượt và khớp bản lề thuộc khớp loại thấp.
C. Khớp bánh răng phẳng thuộc khớp loại thấp.
D. Khớp loại thấp là khớp có thành phần tiếp xúc là mặt. 3
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871 15.
Chọn phát biểu đúng về khớp động:
A. Khớp trượt và khớp bản lề thuộc khớp loại cao.
B. Khớp loại 5 chỉ thực hiện được 1 chuyển động.
C. Khớp loại thấp là khớp có thành phần tiếp xúc là điểm hay đường.
D. Khớp cầu thuộc khớp loại cao. 16.
Chọn phát biểu sai về bậc tự do bị hạn chế:
A. Khớp loại 5 trong không gian có 5 chuyển động bị hạn chế.
B. Khớp loại 5 trong mặt phẳng có 2 chuyển động bị hạn chế.
C. Khớp loại thấp là khớp có 5 chuyển động bị hạn chế.
D. Khớp bánh răng phẳng có 4 chuyển động bị hạn chế. 17.
Phân loại khớp động theo đặc điểm tiếp xúc, ta có:
A. Khớp loại thấp và khớp loại cao.
B. Khớp loại 1, khớp loại 2, khớp loại 3, khớp loại 4 và khớp loại 5.
C. Khớp bản lề, khớp tịnh tiến, khớp bánh răng và khớp cơ cấu cam.
D. Khớp tiếp xúc điểm, khớp tiếp xúc đường và khớp tiếp xúc mặt. 18.
Trong không gian, số bậc tự do của khớp động bị hạn chế tối đa là: A. 5. B. 2. C. 3. D. 0. 19.
Trong mặt phẳng, số bậc tự do của khớp động bị hạn chế tối đa là: A. 2. B. 1. C. 3. D. 5. 4
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871 20. Chuỗi động hở là:
A. Chuỗi động trong đó có khâu chỉ tham gia 1 khớp động.
B. Chuỗi động trong đó mỗi khâu tham gia nhiều hơn 2 khớp động.
C. Chuỗi động trong đó các khâu chuyển động trong các mặt phẳng song song với nhau.
D. Chuỗi động trong đó các khâu chuyển động trong các mặt phẳng không song song với nhau. 21.
Chọn phát biểu đúng về cơ cấu:
A. Cơ cấu là một chuỗi động có một khâu cố định và chuyển động theo quy luật xác
định. Khâu cố định gọi là giá.
B. Cơ cấu là một chuỗi động có các khâu cố định và chuyển động theo quy luật xác
định. Khâu cố định gọi là giá.
C. Cơ cấu là tập hợp các chuỗi động có một khâu cố định và chuyển động theo quy
luật xác định. Khâu cố định gọi là giá.
D. Cơ cấu là tập hợp các chuỗi động có các khâu cố định và chuyển động theo quy luật
xác định. Khâu cố định gọi là giá. 22.
Ràng buộc gián tiếp giữa 2 khâu:
A. Không phải là ràng buộc do khớp nối giữa 2 khâu đó tạo ra mà do các khớp nối trung gian tạo ra.
B. Là ràng buộc do khớp nối giữa 2 khâu đó tạo ra.
C. Là loại ràng buộc thừa, không được cộng vào khi tính bậc tự do.
D. Là loại ràng buộc chỉ tồn tại trong cơ cấu không gian. 23. Nhóm Atxua là nhóm:
A. Có bậc tự do bằng 0. B. 2 khâu 3 khớp.
C. Thỏa mãn điều kiện 3n - 2p5 = 0. D. 4 khâu 6 khớp. 24.
Khớp bánh răng phẳng là khớp loại: A. 4. 5
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871 B. 2. C. 3. D. 5. 25.
Khớp cơ cấu cam là khớp loại: A. 4. B. 2. C. 3. D. 5. 26.
Các khớp sau thuộc khớp loại thấp:
A. Khớp bánh răng, khớp trượt và khớp bản lề.
B. Khớp trượt và khớp bản lề.
C. Khớp cơ cấu cam, khớp trượt và khớp cầu.
D. Khớp bánh răng, khớp cơ cấu cam và khớp trượt. 27.
Các khớp sau thuộc khớp loại cao:
A. Khớp bánh răng, khớp trượt và khớp bản lề.
B. Khớp bánh răng và khớp cơ cấu cam.
C. Khớp cơ cấu cam, khớp trượt và khớp cầu.
D. Khớp bánh răng, khớp cơ cấu cam và khớp trượt. 28.
Trong cơ cấu, ràng buộc thừa và bậc tự do thừa có tác dụng:
A. Làm tăng số khâu của cơ cấu, tăng năng suất máy.
B. Dễ tính toán thiết kế, giảm chi phí chế tạo.
C. Dễ tính bậc tự do, phân tích lực đơn giản.
D. Tăng tuổi thọ cho cơ cấu. 29.
Trong không gian, công thức nào sau đây được áp dụng để tính bậc tự do cho mọi trường hợp?
n k p R R A. W 3 ( . ) W k tr th th
W 3n (2 p p R R tr . ) W B. 5 4 th th
W 6n (2 p p R . R ) W C. 5 4 tr th th 6
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871 30.
Trong mặt phẳng, công thức nào sau đây được áp dụng để tính bậc tự do cho mọi trường hợp? A. W 3n (2 p p R R ) W 5 4 tr th th B. W 6n ( k. p R R ) W k tr th th C. W 3n ( k. p 2 p p R R ) W k 5 4 tr th th D. W 6n (2 p p R R ) W 5 4 tr th th 31.
Chọn phát biểu đúng về bậc tự do:
A. Bậc tự do là số khả năng chuyển động của cơ cấu.
B. Bậc tự do vừa là số khả năng chuyển động của cơ cấu vừa là số thông số độc lập
cần thiết để xác định vị trí bất kỳ của cơ cấu.
C. Bậc tự do là tham số để xác định vị trí bất kỳ của cơ cấu.
D. Bậc tự do là số thông số độc lập cần thiết để xác định vị trí bất kỳ của cơ cấu. 32.
Phát biểu nào đúng về ràng buộc trùng tồn tại giữa 2 khâu:
A. Ràng buộc trùng chỉ là tên gọi khác của ràng buộc gián tiếp.
B. Ràng buộc trùng chỉ là tên gọi khác của ràng buộc trực tiếp.
C. Ràng buộc trùng là loại ràng buộc không có vai trò hạn chế chuyển động giữa 2
khâu, nên ta có thể bỏ nó mà không ảnh hưởng đến chuyển động giữa 2 khâu đó.
D. Ràng buộc trùng là loại ràng buộc làm tăng vai trò hạn chế chuyển động giữa 2 khâu
lên gấp đôi, nên khi tính toán ta phải xét ảnh hưởng của nó là gấp đôi. 33.
Phát biểu nào đúng về khớp động?
A. Khớp động là bộ phận nối động giữa 2 khâu, có tác dụng tạo chuyển động tương đối giữa 2 khâu đó.
B. Khớp động là bộ phận nối động giữa 2 khâu, có tác dụng hạn chế khả năng chuyển
động tương đối giữa 2 khâu đó
C. Khớp động là bộ phận nối giữa 1 khâu cố định và 1 khâu di động, có tác dụng hạn
chế Khả năng chuyển động tương đối giữa 2 khâu đó.
D. Khớp động là bộ phận nối giữa 2 khâu di động, có tác dụng tạo chuyển động tương đối giữa 2 khâu đó. 7
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871 34.
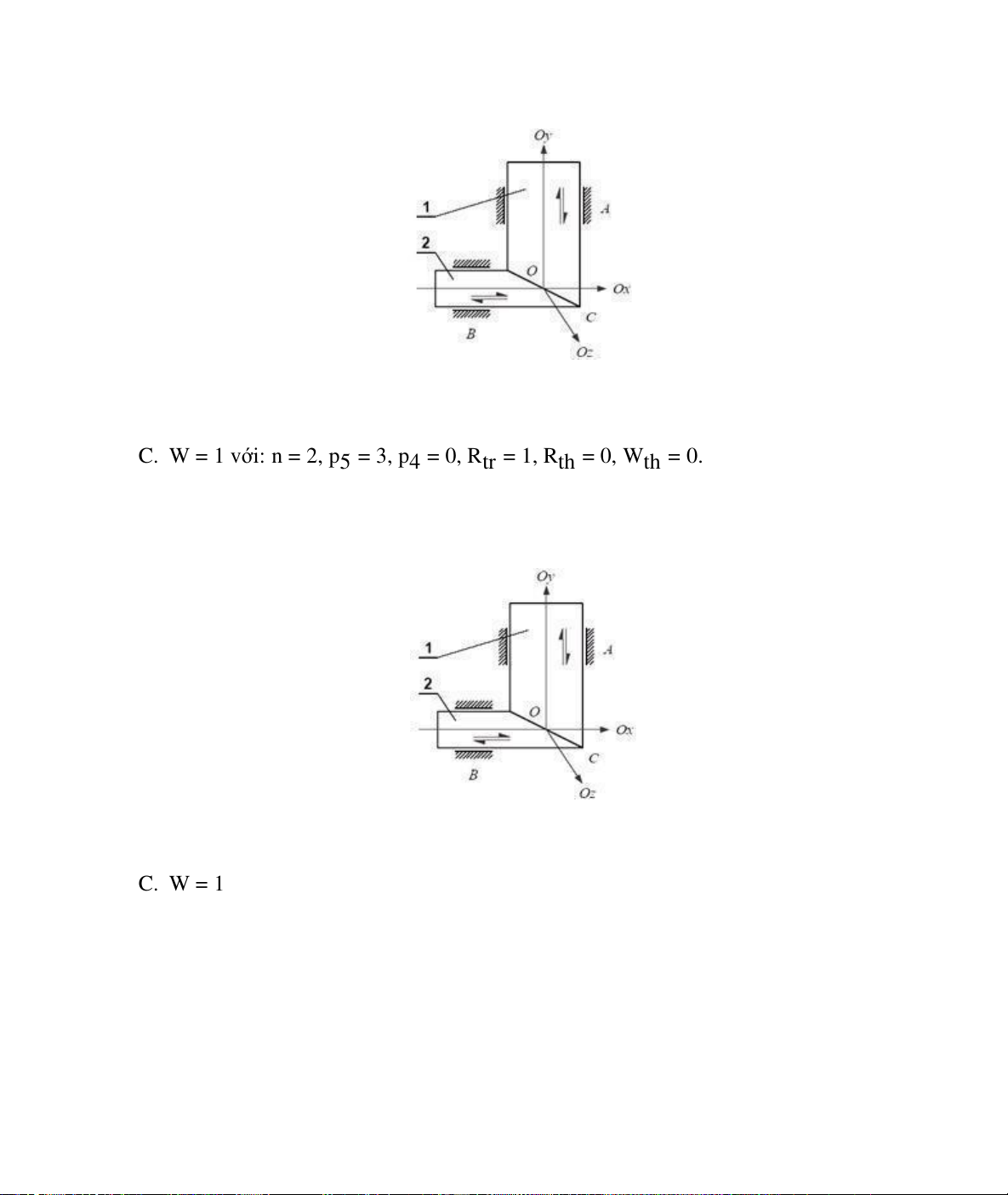
Cho cơ cấu chêm như hình vẽ. Bậc tự do của cơ cấu là:
A. W = 1 với: n = 2, p5 = 3, p4 = 1, Rtr = 0, Rth = 0, Wth = 0.
B. W = 0 với: n = 2, p5 = 3, p4 = 0, Rtr = 0, Rth = 0, Wth = 0.
C. W = 1 với: n = 2, p5 = 3, p4 = 0, Rtr = 1, Rth = 0, Wth = 0.
D. W = 2 với: n = 2, p5 = 2, p4 = 0, Rtr = 0, Rth = 0, Wth = 0. 35.
Tính bậc tự do của cơ cấu chêm phẳng sau: A. W = -1 B. W = 0 C. W = 1 D. W = 2 36.
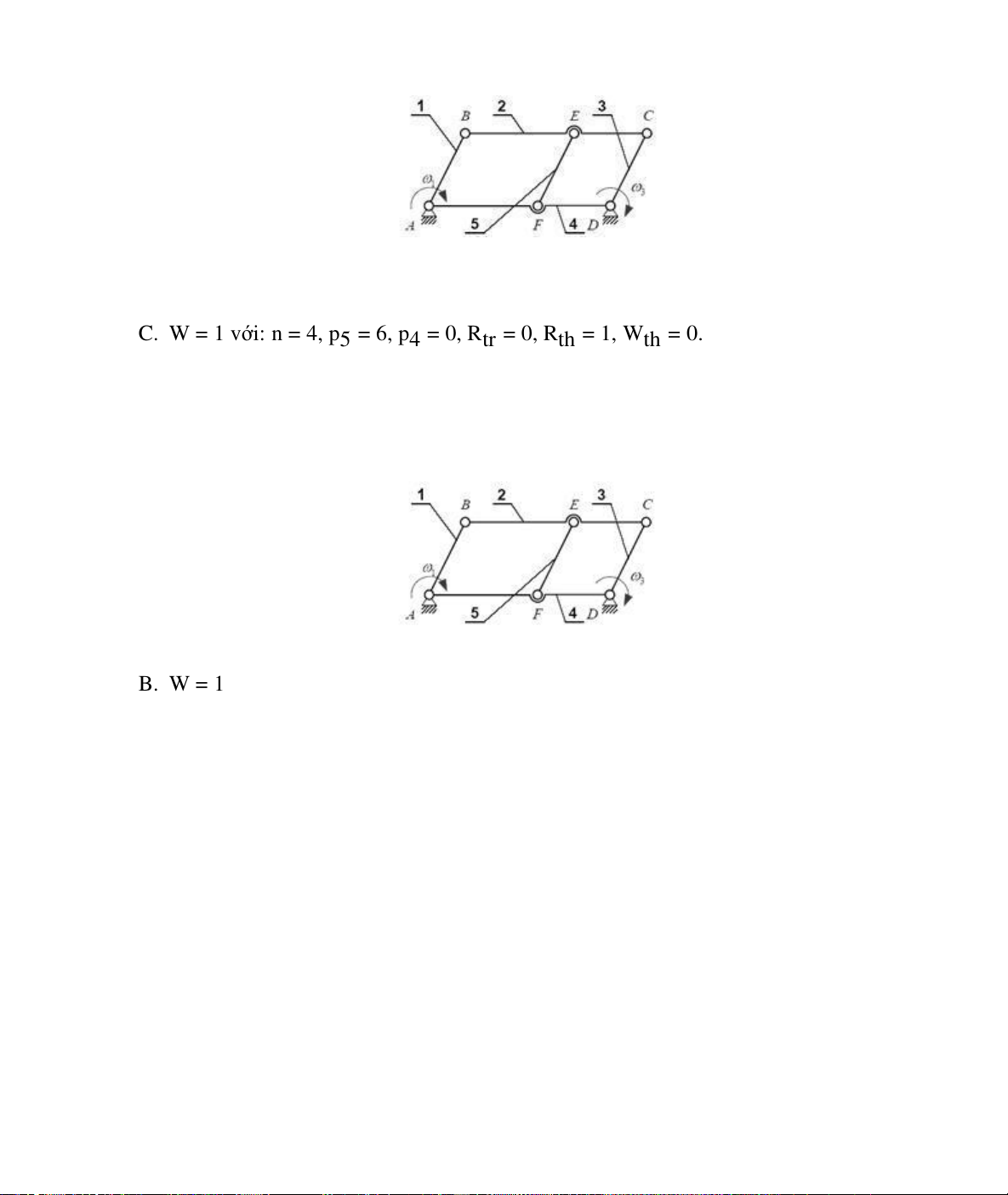
Cho cơ cấu hình bình hành như hình vẽ. Bậc tự do của cơ cấu là: 8
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871
A. W = 0 với: n = 5, p5 = 6, p4 = 0, Rtr = 3, Rth = 1, Wth = 0.
B. W = 0 với: n = 4, p5 = 6, p4 = 0, Rtr = 0, Rth = 0, Wth = 0.
C. W = 1 với: n = 4, p5 = 6, p4 = 0, Rtr = 0, Rth = 1, Wth = 0.
D. W = 1 với: n = 5, p5 = 6, p4 = 0, Rtr = 0, Rth = 0, Wth = 1. 37.
Trong mặt phẳng, tính bậc tự do của cơ cấu hình bình hành sau: A. W = 2 B. W = 1 C. W = 0 D. W = 3 9
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871 38.
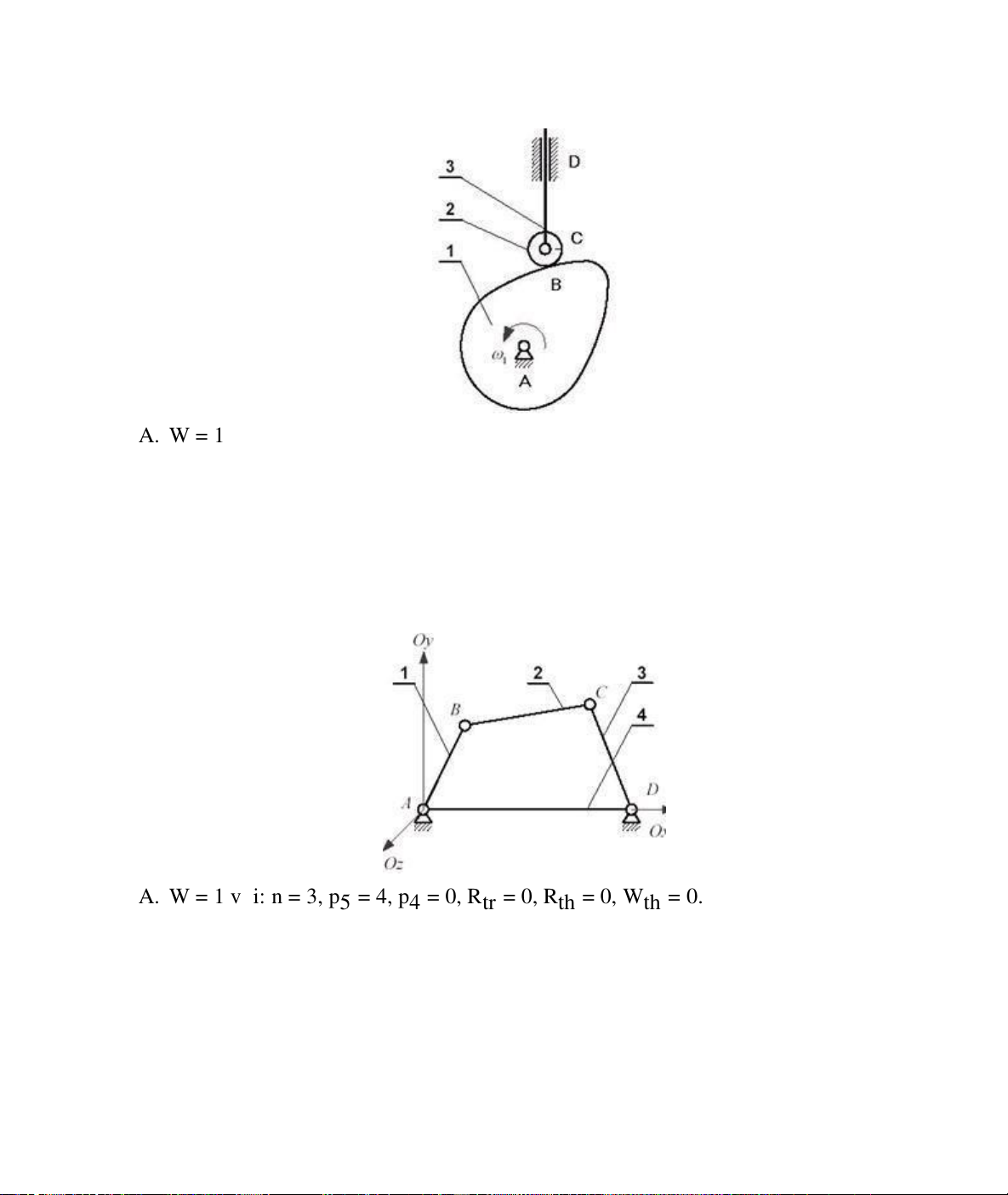
Tính bậc tự do của cơ cấu cam phẳng sau: A. W = 1 B. W = 0 C. W = -1 D. W = 2 39.
Tính bậc tự do của cơ cấu 4 khâu bản lề trong không gian như hình vẽ:
A. W = 1 với: n = 3, p5 = 4, p4 = 0, Rtr = 0, Rth = 0, Wth = 0.
B. W = 1 với: n = 4, p5 = 4, p4 = 0, Rtr = 3, Rth = 0, Wth = 0.
C. W = 1 với: n = 3, p5 = 4, p4 = 0, Rtr = 3, Rth = 0, Wth = 0.
D. W = 1 với: n = 4, p5 = 4, p4 = 0, Rtr = 0, Rth = 0, Wth = 0. 10
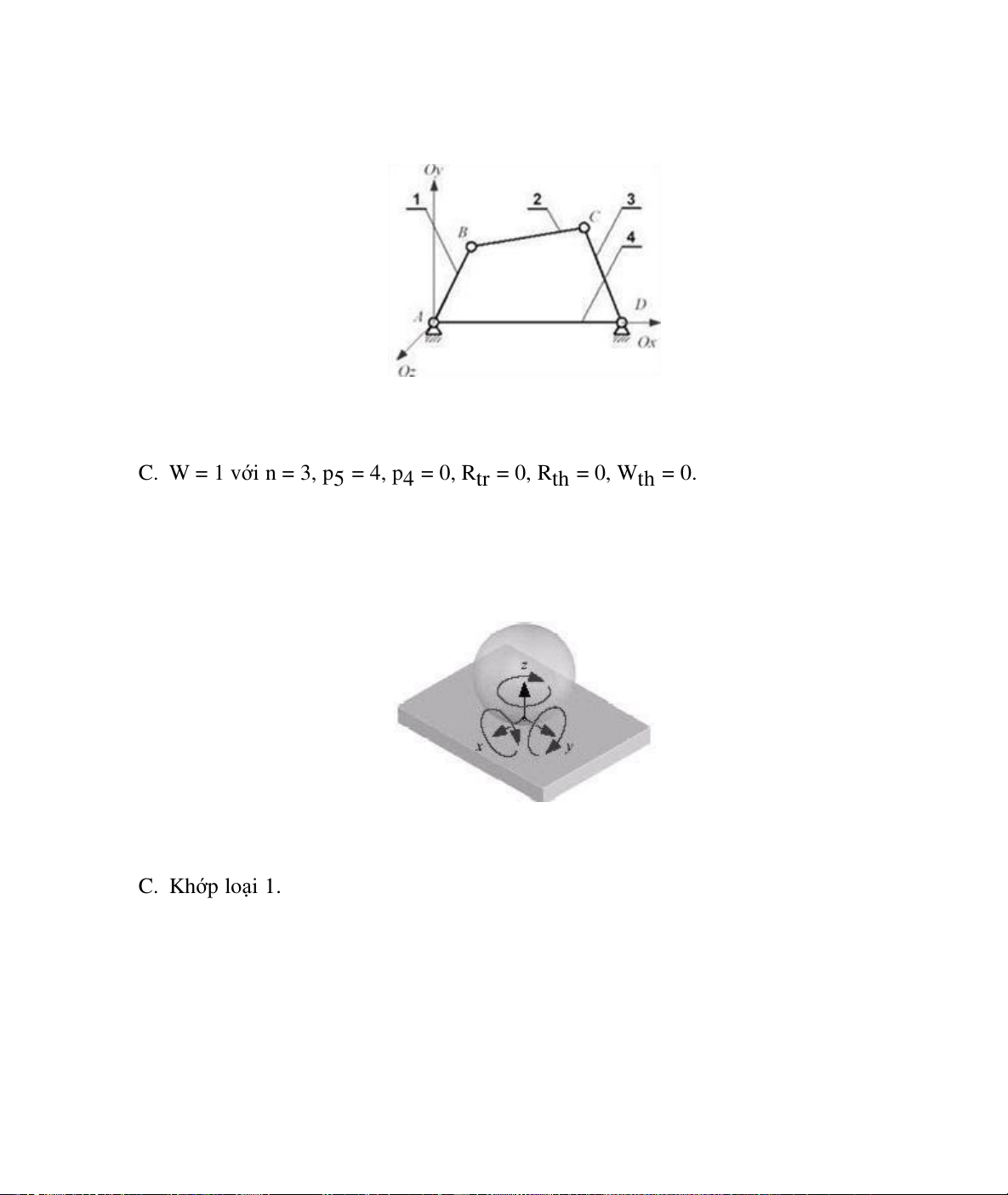
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871 40.
Tính bậc tự do của cơ cấu 4 khâu bản lề trong mặt phẳng như hình vẽ:
A. W = 1 với n = 3, p5 = 4, p4 = 0, Rtr = 3, Rth = 0, Wth = 0.
B. W = 1 với n = 4, p5 = 4, p4 = 0, Rtr = 3, Rth = 0, Wth = 0.
C. W = 1 với n = 3, p5 = 4, p4 = 0, Rtr = 0, Rth = 0, Wth = 0.
D. W = 1 với n = 4, p5 = 4, p4 = 0, Rtr = 0, Rth = 0, Wth = 0. 41.
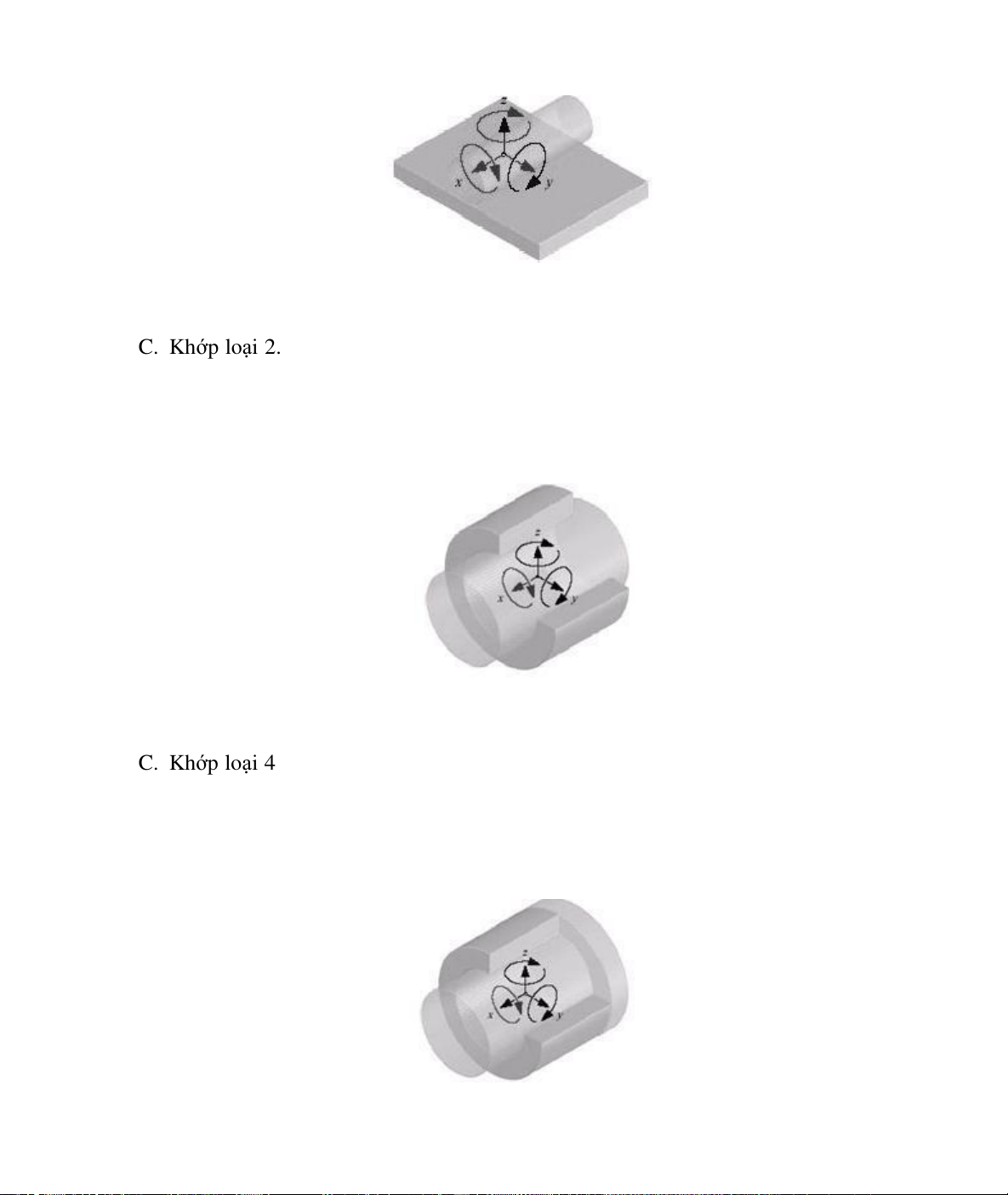
Cho khớp động như hình vẽ. Khớp động là: A. Khớp loại 2. B. Khớp loại 3. C. Khớp loại 1. D. Khớp loại 5. 42.
Cho khớp động như hình vẽ. Khớp động là: 11
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871 A. Khớp loại 1. B. Khớp loại 5. C. Khớp loại 2. D. Khớp loại 4. 43.
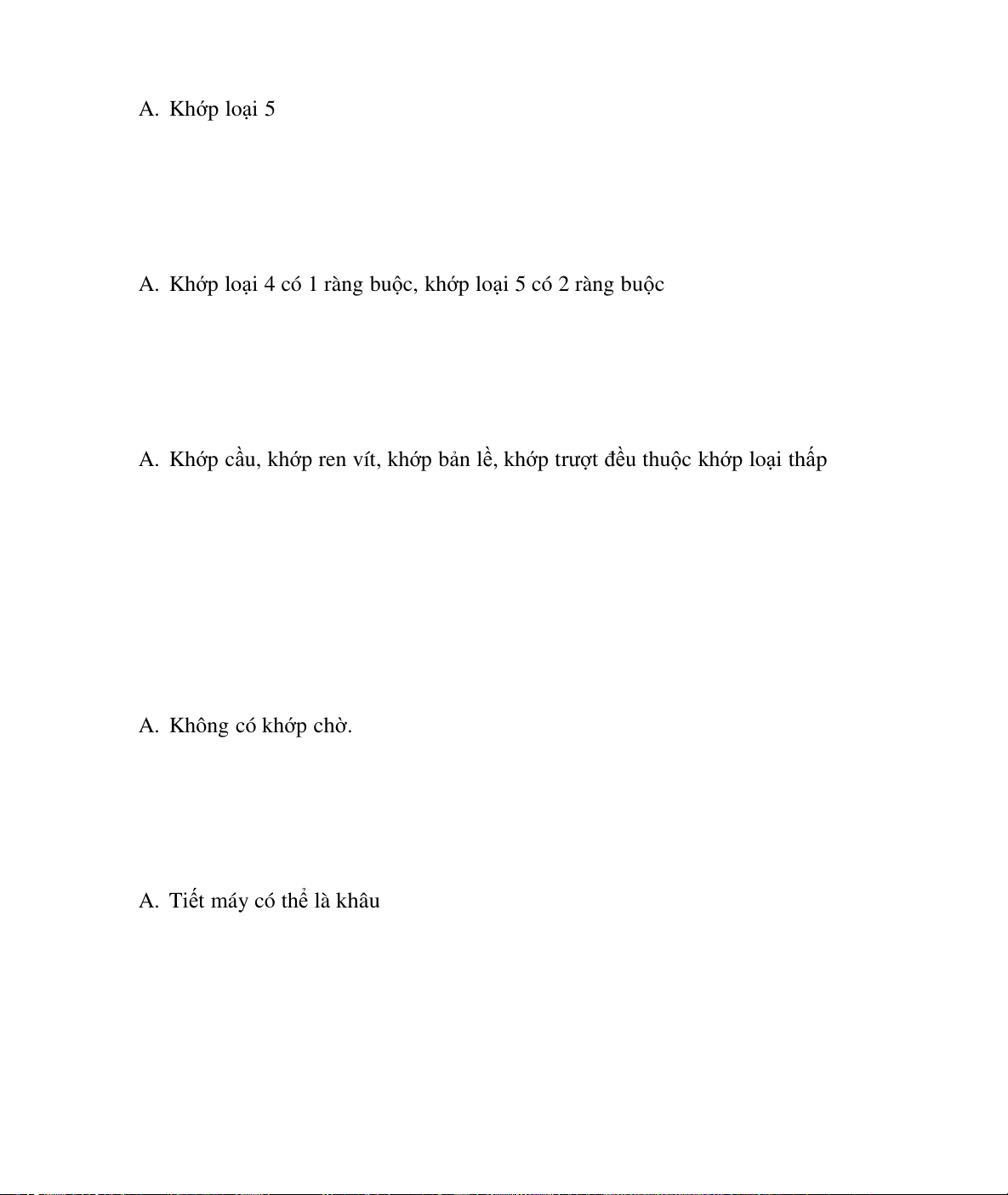
Cho khớp động như hình vẽ. Khớp động là: A. Khớp loại 2. B. Khớp loại 5. C. Khớp loại 4. D. Khớp loại 1. 44.
Cho khớp động như hình vẽ. Khớp động là: 12
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871 A. Khớp loại 5. B. Khớp loại 1. C. Khớp loại 4. D. Khớp loại 2. 45.
Chọn phát biểu đúng về khớp động trong cơ cấu phẳng:
A. Khớp loại 4 có 1 ràng buộc, khớp loại 5 có 2 ràng buộc.
B. Khớp loại 4 có 2 ràng buộc, khớp loại 5 có 1 ràng buộc.
C. Khớp loại 4 có 2 chuyển động là trượt và quay, khớp loại 5 chỉ có quay.
D. Khớp loại 4 có 4 ràng buộc, khớp loại 5 có 5 ràng buộc. 46. Các loại khớp sau:
A. Khớp cầu, khớp ren vít, khớp bản lề, khớp trượt đều thuộc khớp loại thấp.
B. Khớp cầu, khớp ren vít, khớp bánh răng phẳng đều thuộc khớp loại thấp.
C. Khớp cơ cấu cam, khớp bánh răng phẳng, khớp ren vít đều có bốn bậc tự do bị hạn chế.
D. Khớp cơ cấu cam, khớp bánh răng phẳng, khớp ren vít, khớp bản lề, khớp trượt,
khớp cầu có số bậc tự do bị hạn chế hoặc thuộc khớp loại nào tùy theo xét trong
không gian hay mặt phẳng. 47.
Trong cơ cấu phẳng hoàn chỉnh thì: A. Không có khớp chờ. B. Phải có khớp chờ.
C. Có ít nhất một khớp chờ.
D. Có hay không có khớp chờ tùy theo cơ cấu. 48. Trong cơ cấu phẳng thì:
A. Tiết máy có thể là khâu. B. Tiết máy là khâu.
C. Tiết máy không thể là khâu.
D. Tiết máy là bộ phận của khâu. 49. Trong cơ cấu phẳng thì:
A. Khâu cũng là tiết máy. 13
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871
B. Khâu gồm nhiều tiết máy.
C. Khâu độc lập với tiết máy.
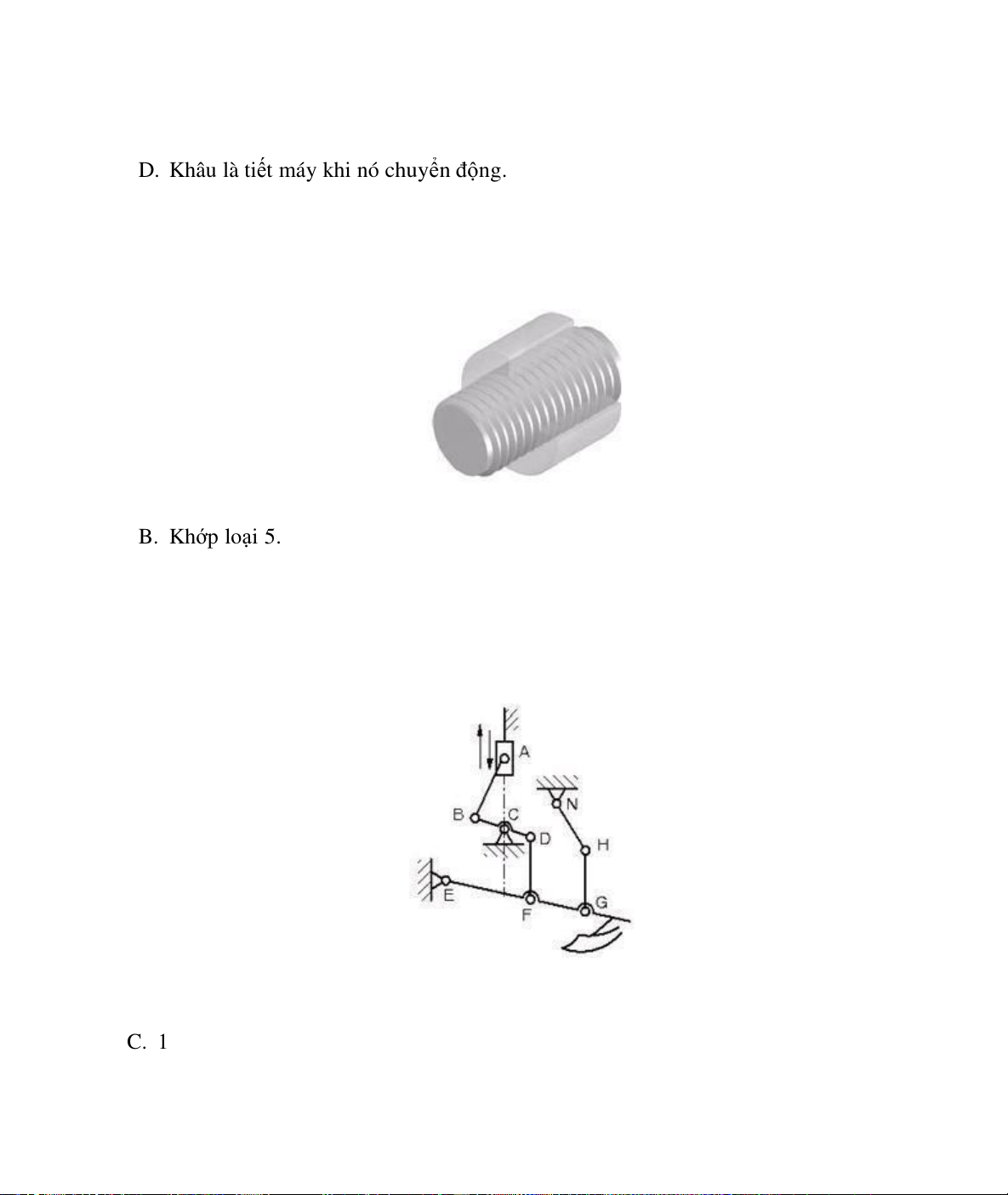
D. Khâu là tiết máy khi nó chuyển động. 50.
Cho khớp động như hình vẽ. Khớp động là: A. Khớp loại 1. B. Khớp loại 5. C. Khớp loại 2. D. Khớp loại 4. 51.
Tính bậc tự do của cơ cấu phẳng sau: A. 2 B. 3 C. 1 D. 0 14
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871 52.
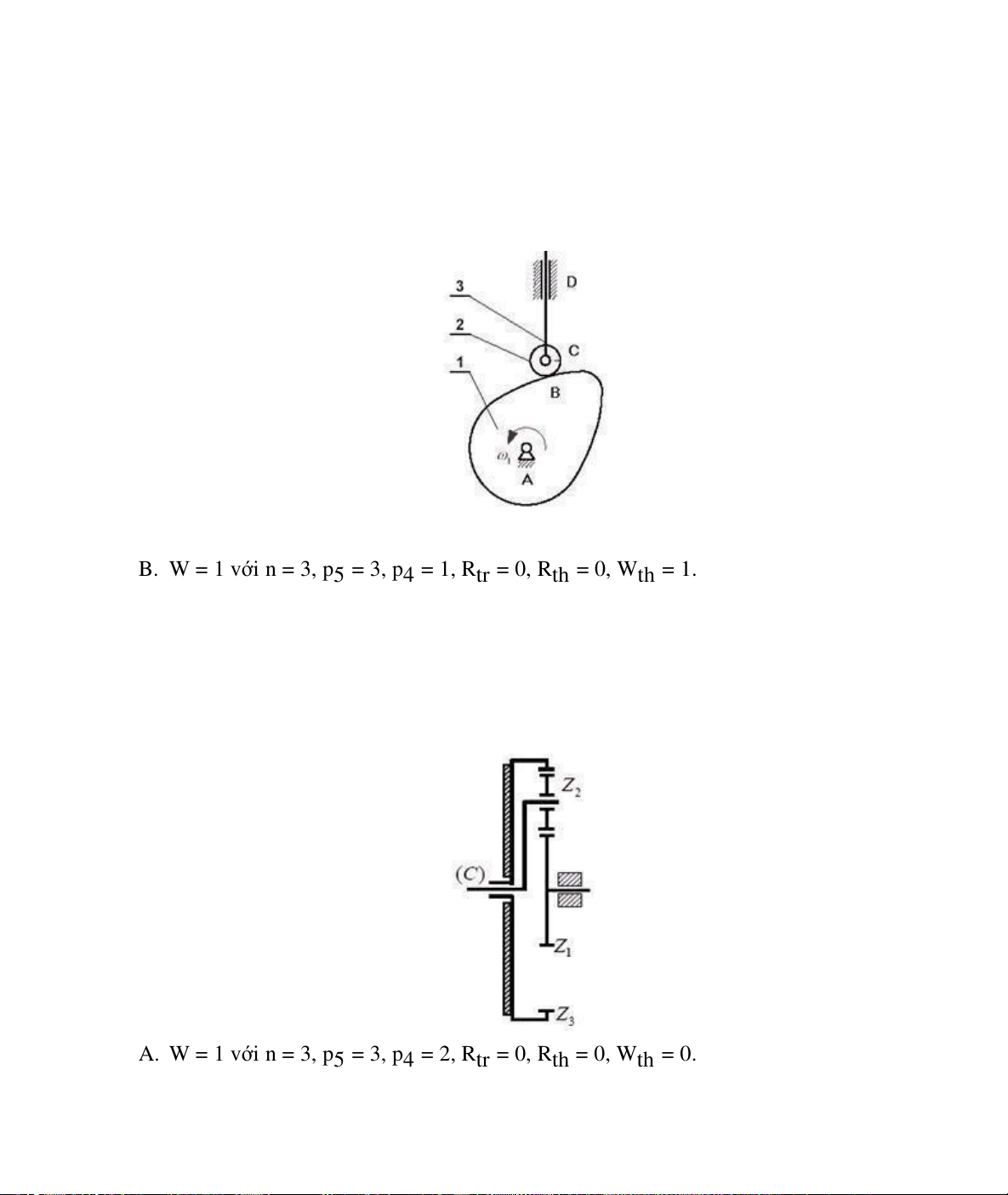
Cho cơ cấu cam phẳng như hình vẽ. Bậc tự do của cơ cấu là:
A. W = 1 với n = 3, p5 = 4, p4 = 0, Rtr = 0, Rth = 0, Wth = 1.
B. W = 1 với n = 3, p5 = 3, p4 = 1, Rtr = 0, Rth = 0, Wth = 1.
C. W = 1 với n = 3, p5 = 3, p4 = 1, Rtr = 0, Rth = 1, Wth = 0.
D. W = 1 với n = 3, p5 = 4, p4 = 0, Rtr = 0, Rth = 1, Wth = 0. 53.
Cho cơ cấu phẳng như hình vẽ. Bậc tự do của cơ cấu là:
A. W = 1 với n = 3, p5 = 3, p4 = 2, Rtr = 0, Rth = 0, Wth = 0. 15
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871
B. W = 1 với n = 4, p5 = 4, p4 = 1, Rtr = 0, Rth = 0, Wth = 2.
C. W = 2 với n = 3, p5 = 3, p4 = 1, Rtr = 0, Rth = 0, Wth = 0.
D. W = 2 với n = 4, p5 = 4, p4 = 2, Rtr = 0, Rth = 1, Wth = 1. 54.
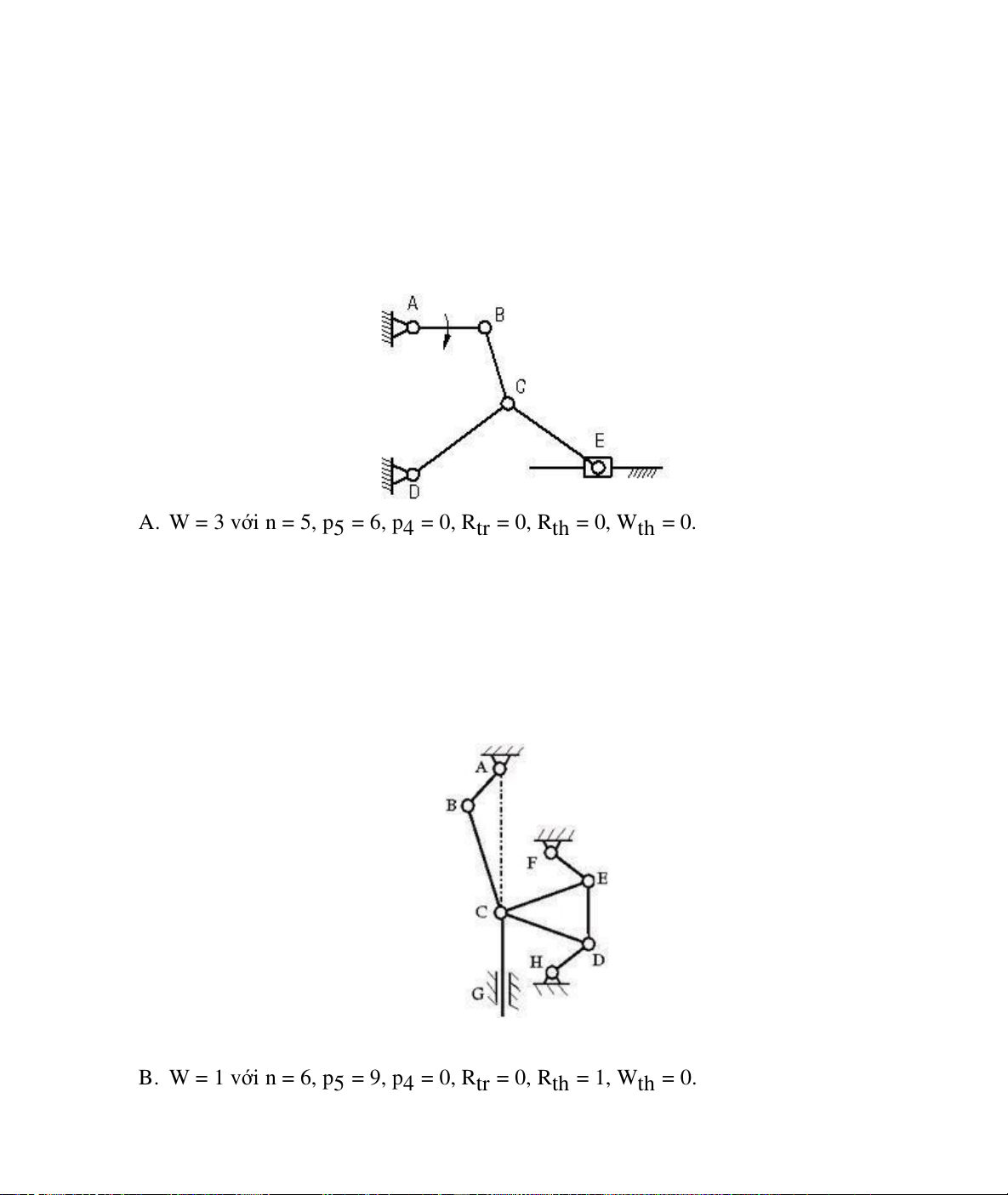
Cho cơ cấu phẳng như hình vẽ. Bậc tự do của cơ cấu là:
A. W = 3 với n = 5, p5 = 6, p4 = 0, Rtr = 0, Rth = 0, Wth = 0.
B. W = 1 với n = 5, p5 = 6, p4 = 0, Rtr = 0, Rth = 0, Wth = 2.
C. W = 1 với n = 5, p5 = 7, p4 = 0, Rtr = 0, Rth = 0, Wth = 0.
D. W = 3 với n = 5, p5 = 6, p4 = 0, Rtr = 0, Rth = 1, Wth = 1. 55.
Cho cơ cấu phẳng như hình vẽ. Bậc tự do của cơ cấu là:
A. W = 2 với n = 6, p5 = 8, p4 = 0, Rtr = 0, Rth = 0, Wth = 0.
B. W = 1 với n = 6, p5 = 9, p4 = 0, Rtr = 0, Rth = 1, Wth = 0. 16
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871
C. W = 2 với n = 6, p5 = 8, p4 = 0, Rtr = 0, Rth = 1, Wth = 1.
D. W = 1 với n = 6, p5 = 8, p4 = 0, Rtr = 0, Rth = 0, Wth = 1. 56.
Cho cơ cấu cam phẳng như hình vẽ. Bậc tự do của cơ cấu là:
A. W = 2 với n = 5, p5 = 6, p4 = 0, Rtr = 0, Rth = 0, Wth = 1.
B. W = 1 với n = 5, p5 = 7, p4 = 0, Rtr = 0, Rth = 0, Wth = 0.
C. W = 2 với n = 5, p5 = 7, p4 = 1, Rtr = 1, Rth = 1, Wth = 0.
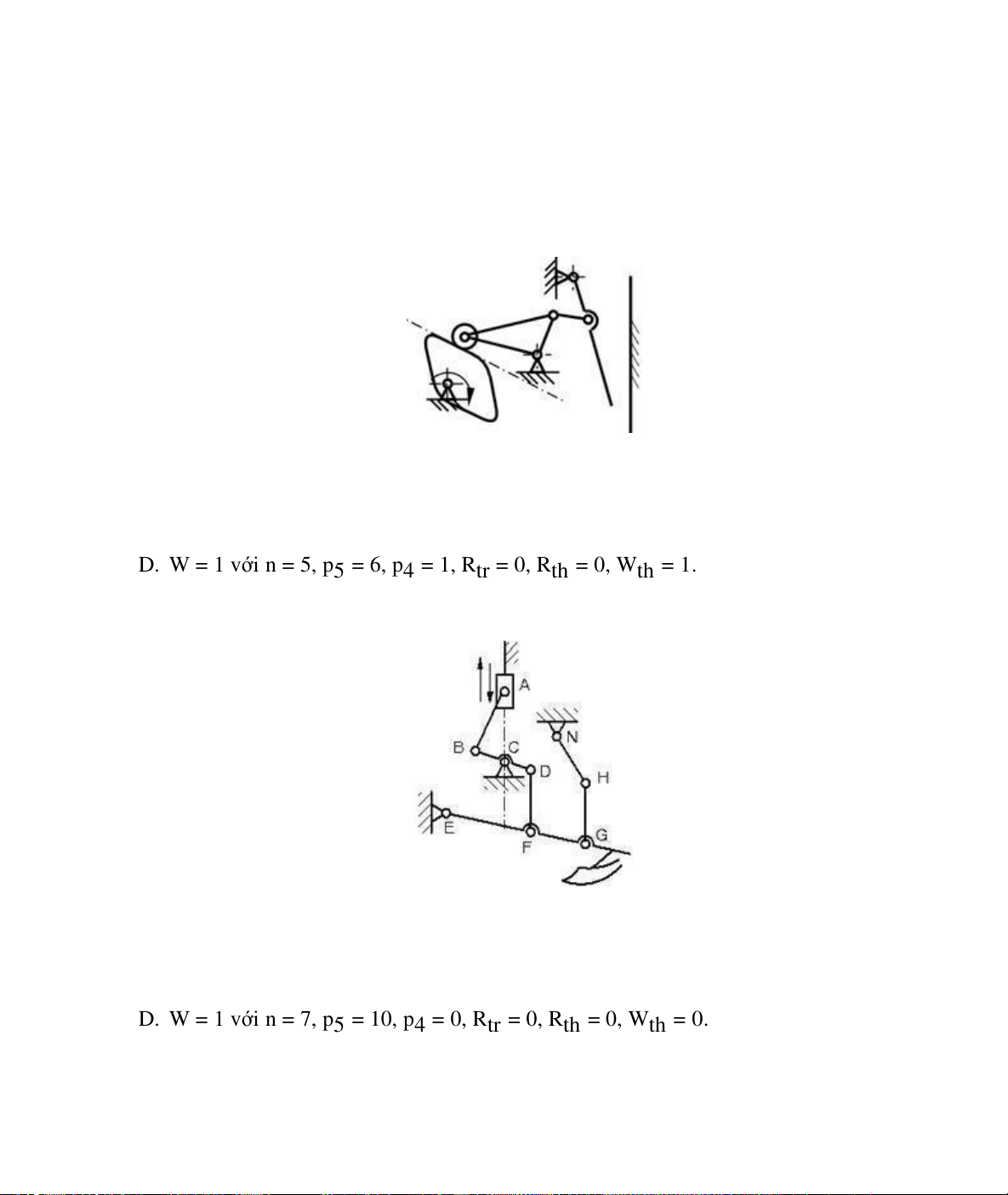
D. W = 1 với n = 5, p5 = 6, p4 = 1, Rtr = 0, Rth = 0, Wth = 1. 57.
Cho cơ cấu phẳng như hình vẽ. Bậc tự do của cơ cấu là:
A. W = 2 với n = 7, p5 = 9, p4 = 0, Rtr = 0, Rth = 0, Wth = 1.
B. W = 2 với n = 7, p5 = 10, p4 = 0, Rtr = 0, Rth = 1, Wth = 0.
C. W = 1 với n = 7, p5 = 9, p4 = 1, Rtr = 0, Rth = 0, Wth = 1.
D. W = 1 với n = 7, p5 = 10, p4 = 0, Rtr = 0, Rth = 0, Wth = 0. 17
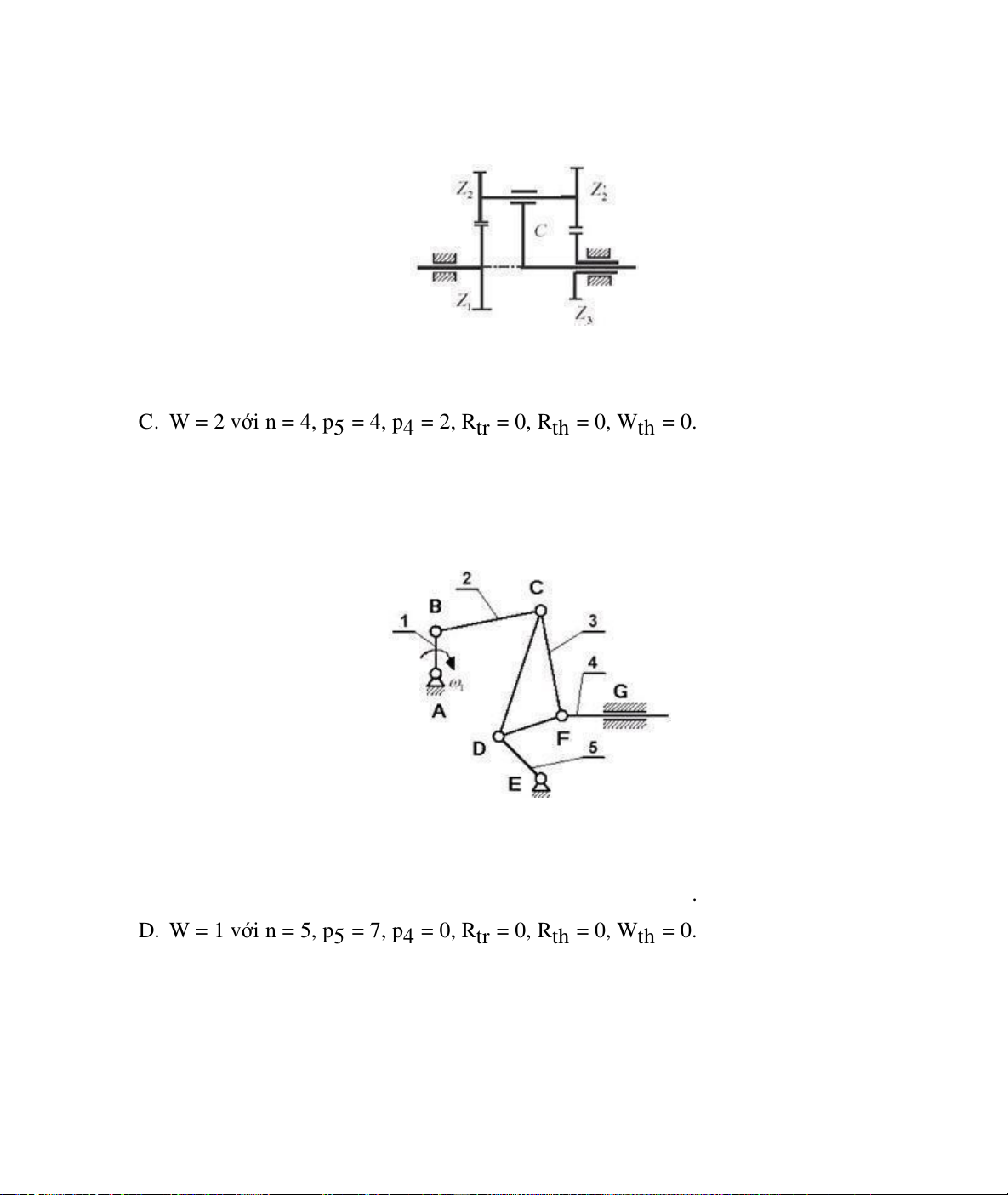
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871 58.
Cho cơ cấu phẳng như hình vẽ. Bậc tự do của cơ cấu là:
A. W = 1 với n = 3, p5 = 4, p4 = 2, Rtr = 0, Rth = 2, Wth = 0.
B. W = 2 với n = 4, p5 = 5, p4 = 0, Rtr = 0, Rth = 0, Wth = 0.
C. W = 2 với n = 4, p5 = 4, p4 = 2, Rtr = 0, Rth = 0, Wth = 0.
D. W = 1 với n = 3, p5 = 5, p4 = 0, Rtr = 0, Rth = 2, Wth = 0. 59.
Cho cơ cấu phẳng như hình vẽ. Bậc tự do của cơ cấu là:
A. W = 1 với n = 5, p5 = 6, p4 = 0, Rtr = 0, Rth = 0, Wth = 2.
B. W = 1 với n = 5, p5 = 7, p4 = 0, Rtr = 0, Rth = 1, Wth = 1.
C. W = 1 với n = 5, p5 = 6, p4 = 2, Rtr = 0, Rth = 2, Wth = 0.
D. W = 1 với n = 5, p5 = 7, p4 = 0, Rtr = 0, Rth = 0, Wth = 0. 18
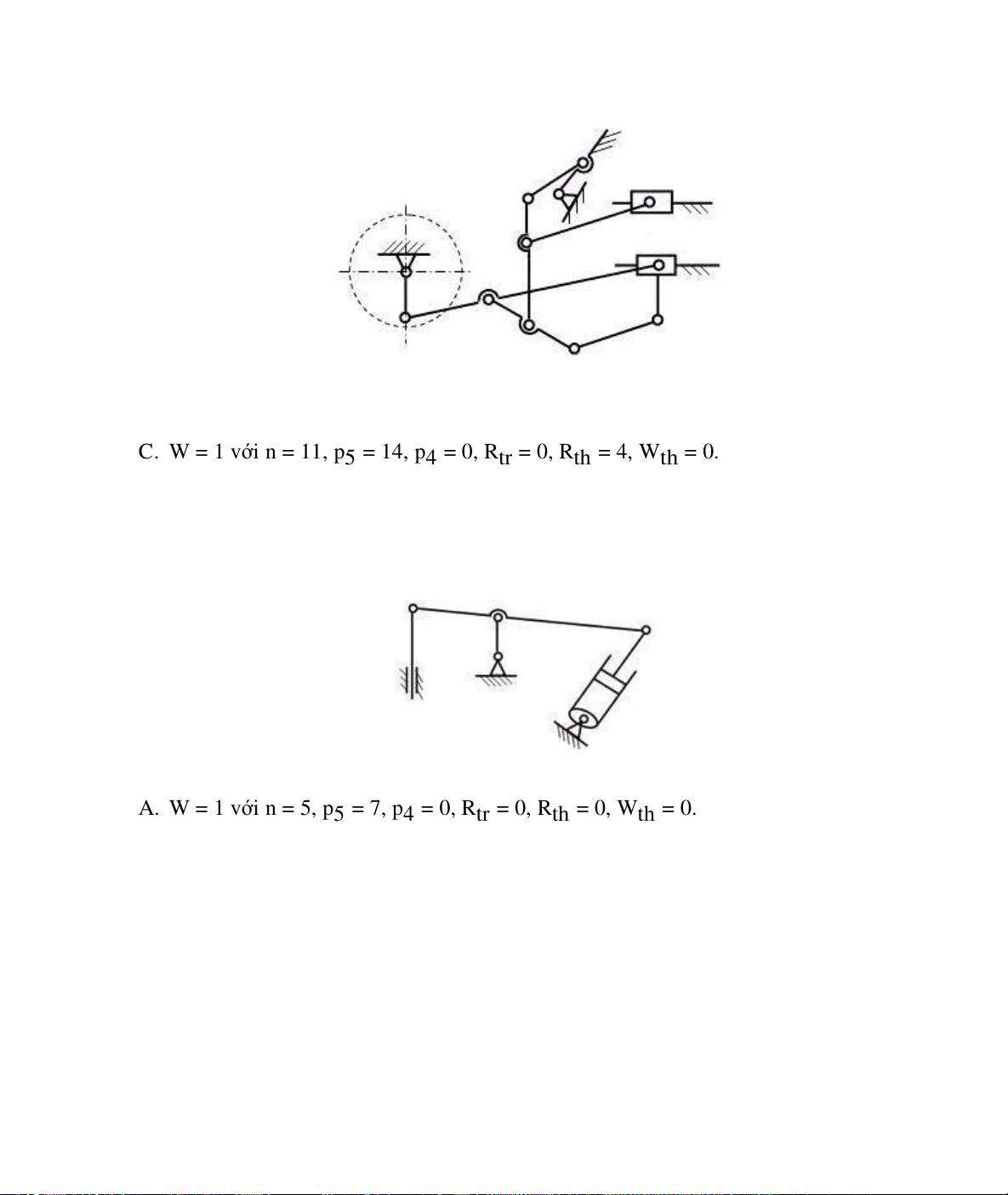
Downloaded by Hi?n Thu (hienexpect@gmail.com) lOMoARcPSD|51118871 60.
Cho cơ cấu phẳng như hình vẽ. Bậc tự do của cơ cấu là:
A. W = 2 với n = 10, p5 = 13, p4 = 0, Rtr = 0, Rth = 2, Wth = 0.
B. W = 1 với n = 9, p5 = 13, p4 = 0, Rtr = 0, Rth = 0, Wth = 0.
C. W = 1 với n = 11, p5 = 14, p4 = 0, Rtr = 0, Rth = 4, Wth = 0.
D. W = 2 với n = 11, p5 = 14, p4 = 0, Rtr = 0, Rth = 3, Wth = 0. 61.
Cho cơ cấu phẳng như hình vẽ. Bậc tự do của cơ cấu là:
A. W = 1 với n = 5, p5 = 7, p4 = 0, Rtr = 0, Rth = 0, Wth = 0.
B. W = 1 với n = 4, p5 = 6, p4 = 0, Rtr = 0, Rth = 1, Wth = 0.
C. W = 2 với n = 5, p5 = 6, p4 = 1, Rtr = 0, Rth = 0, Wth = 0.
D. W = 2 với n = 5, p5 = 6, p4 = 1, Rtr = 0, Rth = 1, Wth = 1. 19
Downloaded by Hi?n Thu (hienexpect@gmail.com)
Tài liệu liên quan:
-

Nhận thức và định hướng của sinh viên kế toán với cách mạng công nghiệp 4.0: Nghiên cứu tại trường Đại học Công nghiệp Hà Nội
547 274 -
Giáo trình hệ cơ sở dữ liệu oracle | Trường Đại học Công Nghiệp Hà Nội
256 128 -

Bài tập Cấu trúc dữ liệu và giải thuật | Đại học Công nghiệp Hà Nội
391 196 -

Giáo trình hệ quản trị cơ sở dữ liệu SQL | Trường Đại học Công Nghiệp Hà Nội
1 K 487