Đề tài: Sử dụng máy bay không người lái chụp ảnh phục vụ nghiên cứu trong nông nghiệp | Đại học Phú Yên
Đề tài: Sử dụng máy bay không người lái chụp ảnh phục vụ nghiên cứu trong nông nghiệp | Đại học Phú Yên được sưu tầm và soạn thảo dưới dạng file PDF để gửi tới các bạn sinh viên cùng tham khảo, ôn tập đầy đủ kiến thức, chuẩn bị cho các buổi học thật tốt. Mời bạn đọc đón xem!
Môn: Infomation Technology (DC19CTT01) 10 tài liệu
Trường: Trường Đại học Phú Yên 55 tài liệu
Tác giả:























Preview text:
TRƯỜNG ĐẠI HỌC PHÚ YÊN
KHOA KỸ THUẬT – CÔNG NGHỆ Đề tài
SỬ DỤNG MÁY BAY KHÔNG NGƯỜI LÁI CHỤP ẢNH
PHỤC VỤ NGHIÊN CỨU TRONG NÔNG NGHIỆP
Sinh viên chịu trách nhiệm: Lê Anh Thương Lớp: ĐH CNTT C19
Giảng viên hướng dẫn: TS Võ Thị Hồng Loan Phú Yên, 2022 MỤC LỤC MỞ ĐẦU 1 1. Lý do chọn đề tài 1 2. Tổng quan tài liệu 1 3. Mục tiêu nghiên cứu 3
4. Đối tượng, phương pháp nghiên cứu 3
a. Đối tượng nghiên cứu 3
b. Phương pháp nghiên cứu 3 5. Phạm vi nghiên cứu 4 6. Nội dung nghiên cứu 4
CHƯƠNG 1: MÁY BAY KHÔNG NGƯỜI LÁI VÀ PHƯƠNG PHÁP XỬ LÝ ẢNH 5
1.1. Khái niệm Unmanned Aerial Vehicle(UAV) 5 1.2. Máy ảnh nhiệt 5 1.3. Ứng dụng thực tế 5
1.4. Tổng quan về phương pháp đo ảnh khảo sát địa hình bằng UAV 5 1.6. Chỉ số NDVI 7
CHƯƠNG 2: THỰC TRẠNG, NGUYÊN NHÂN CỦA VẤN ĐỀ NGHIÊN CỨU 9
2.1. Khảo sát địa hình thông qua phương pháp RTK 9
2.2. Thực nghiệm địa hình sau ảnh chụp từ drone & mẫu nghiên cứu,
phương pháp thu thập, đặc điểm, dữ liệu, phần mềm sử dụng, đối chiếu cơ sở lý thuyết 10 2.2.1. Phương pháp so sánh 10
2.2.2. Phương pháp đánh giá 10 2.2.3. Bảng số liệu 11
2.2.4. So sánh sai số trung bình Mp thực đo với sai số Mp quy phạm
thành lập bản đồ địa hình 11
2.2.5. Thu thập dữ liệu và điều tra khảo sát thực địa 13
2.4 Xây dựng ảnh ghép trực giao (Orthomosaic) 14
CHƯƠNG 3: KẾT QUẢ ĐÁNH GIÁ QUAN HỆ GIỮA GIÁ TRỊ
NDVI/NDRE VỚI MỨC ĐỘ NHIỄM HẠI CỦA CÂY LÚA 16
KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN 20 1. Kết luận 20 2. Hướng phát triển 20 TÀI LIỆU THAM KHẢO 21 DANH MỤC HÌNH ẢNH
Hình 1.1 Một bản đồ NDVI được thu lại từ drone 11
Hình 2.1. Mô hình sắp xếp sử dụng phương pháp RTK 12
Hình 2.2. Bản đồ nghiên cứu 17
Hình 2.3. Quá trình xây dựng ánh ghép trực quan 18
Hình 3.1. Biểu đồ diện tích lúa nhiễm dịch hại 20
Hình 3.2. Mức độ nhiễm dịch hại trên lúa 21 MỞ ĐẦU
1. Lý do chọn đề tài
Trong thời đại hiện nay, có quá nhiều sự phát triển trong nông nghiệp
chính xác để tăng năng suất cây trồng. Đặc biệt, trong các nước đang phát triển
như Việt Nam, hơn 70% người dân nông thôn phụ thuộc vào các lĩnh vực nông
nghiệp. Sản xuất nông nghiệp tại Việt Nam trong những năm qua đã có những
chuyển biến tích cực, các loại máy móc thiết bị tự động hóa đã được áp dụng
trong nhiều khâu sản xuất dần thay thế sức lao động của con người. Trong đó, có
máy bay không người lái – Unmanned Aerial Vehicle viết tắt là UAV.
Việc sử dụng UAV vào những khu vực địa hình khó tiếp cận, những khu
vườn, cánh đồng rộng lớn và tích hợp xử lý ảnh vào UAV đã giúp con người kịp
thời phát hiện dịch bệnh gây hại trên cây trồng, từ đó mà con người có thể khắc
phục một cách nhanh chóng và hiệu quả.
2. Tổng quan tài liệu
Độ chênh lệch ảnh giữa máy chụp ảnh phổ thông và máy ảnh trên thiết bị máy bay không người lái
Thông thường trong chụp ảnh hàng không các thông số định hướng trong
của ảnh (bao gồm độ dài tiêu cự, tọa độ điểm trung tâm của ảnh, các thông số độ
cong ảnh) được biết trước. Tuy nhiên, đối với máy ảnh gắn trên các thiết bị UAV
thì các thông số này thường không được biết trước hoặc không ổn định bởi các
máy chụp ảnh này, thường là máy chụp ảnh phổ thông.
Sự phát triển của máy bay không người lái trong giai đoạn này
Ngày nay, công nghệ viễn thám trên thế giới phát triển khá đa dạng, có rất
nhiều thiết bị thu nhận các hình ảnh có độ phân giải mặt đất từ vài centimet đến
hàng chục mét, có thể chụp ở cự ly rất gần vài chục mét cho đến khoảng cách rất
xa hàng trăm kilomet như: chụp ảnh vệ tinh, chụp ảnh hàng không bằng máy
bay có người lái và không người lái (UAV), công nghệ quét Lidar[2].
Nguyên lý ghép khối của máy bay không người lái và phương pháp SfM tiêu biểu kết hợp cùng
Về lý thuyết, ảnh chụp từ UAV có nguyên lý ghép khối cũng tương tự như
nguyên lý ghép khối ảnh chụp lập thể từ máy bay có người lái truyền thống. Tuy
nhiên, số lượng ảnh UAV cần thiết để bao phủ khu vực cần chụp ảnh thường rất
lớn từ vài chục đến vài trăm, thậm chí là hàng nghìn tấm ảnh do ảnh UAV
thường có kích thước nhỏ vì được chụp ở độ cao thấp. Do đó sẽ không hiệu quả
hoặc không thể sử dụng được phương pháp truyền thống. Đặc biệt là khâu chọn
các điểm song trùng hay tăng dày khống chế ảnh nội nghiệp. Nhiều nhà khoa
học trên thế giới để giải quyết vấn đề này, đã nghiên cứu phương pháp xử lý ảnh 1
chiết tách các điểm song trùng, xây dựng đám mây điểm dày đặc và ảnh trực
giao bằng việc áp dụng các thuật toán khớp ảnh tự động. Một trong những
phương pháp tiêu biểu và được sử dụng phổ biến hiện nay được gọi tắt là SfM.
Phương pháp này sử dụng các điểm đặc trưng là kết quả của giải thuật biến đổi
đối tượng phi tỉ lệ (Scale-Invariant Feature Transform - SIFT)[1].
Xây dựng bản đồ phân tích tỷ lệ đặc trưng của địa hình trên công nghệ UAV
Phòng ngừa cỏ dại và sâu bệnh trong cây trồng, đặc biệt là ở các vùng
nông nghiệp địa phương chưa được áp dụng nhiều hình thức tiền xử lý địa hình
trước khi đưa vào điều chế thuốc bảo vệ thực vật. Với công nghệ UAV cho phép
ra lập bản đồ địa hình với dải băng tuyến đủ rộng với thời gian ngắn để nghiên
cứu hướng tuyến mà các phương pháp truyền thống không cho phép đo chi phí
quá cao và tiến độ gấp, do đó cho phép người kỹ sư thiết kế có nhiều lựa chọn
trong cách nhìn tổng quan để lựa chọn được hướng truyến ưu nhất cho dự án và
tính thuyết phục nhất đối với các chủ thể liên quan. Vì vậy, đề tài này sẽ áp dụng
kĩ thuật xử lý hình ảnh từ UAV, nhằm mục đích xây dựng bản đồ kết quả với lớp
ảnh âm bản là đối tượng “cỏ dại” cần xác định để giải quyết bài toán bảo vệ môi
trường sinh thái tại địa phương Nghiên cứu thế giới
Nhiều nghiên cứu khoa học và thực tiễn sản xuất trong và ngoài nước đã
minh chứng tính hiệu quả của các phương pháp công nghệ mới như GNSS, GIS,
viễn thám, LIDAR, UAV, TLS v.v…Chuyên mục phổ biến kiến thức sẽ cung cấp
cho các bạn trong và ngoài ngành các kiến thức là kết quả nghiên cứu khoa học,
triển khai công nghệ trong lĩnh vực trắc địa, bản đồ, viễn thám trên thế giới và ở Việt Nam[3].
Trên thế giới, viê žc áp dụng phương pháp đo ảnh khoảng cách gần với ảnh
chụp từ máy ảnh số gắn trên UAV đã được áp dụng với rất nhiều ứng dụng khác
nhau như: đo vẽ hiê žn trạng tai nạn giao thông, đo vẽ đánh giá khối lượng khai
thác ở các mỏ lộ thiên, bản đồ địa hình khu vực nhỏ, bản đồ địa chính, giám sát
Tài nguyên và Môi trường… Nghiên cứu trong nước
Ở Viê žt Nam, năm 1999, Ban Nghiên cứu mục tiêu bay - Viê žn Kỹ thuật
Phòng không Không quân - Quân chủng Phòng không Không quân đã thiết kế
lắp đă žt máy bay không người lái, và kết quả là hai chiếc UAV ký hiê žu M-96 (bay
ngày) và M-96D (bay đêm) đã bay thử thành công và tiếp tục hoàn thiê žn thành
những Loại M100-CT, M400-CT…[4] với sự điểu khiển bay theo chương trình,
dẫn đường của GPS trên nềnbản đồ số. Năm 2013, Viê žn Công nghê ž Không gian,
thuộc Viê žn Hàn lâm Khoa học và Công nghê ž Viê žt Nam đã bay thử nghiê žm 5 2
ngày mẫu UAV tại bãi thử nghiê žm Hoà Lạc - Hà Nội và đã tiến hành thử nghiê žm
bay chụp ảnh ở Nha Trang, Lạc Dương, Lâm Đồng (chủ yếu chụp ảnh chưa đề
cập đến viê žc sử dụng trong đo ảnh).
Ngoài việc giá thành tương đối thấp, công nghệ UAV với các máy ảnh
phổ thông dễ dàng thu nhận các ảnh số với độ phân giải rất cao (mm, cm), trong
điều kiện địa hình phức tạp, môi trường nguy hiểm. Thêm nữa, các phần mềm
mã nguồn mở và phần mềm thương mại đều tích hợp các thuật toán SfM, cho
phép gần như hoàn toàn tự động xử lý ảnh, xây dựng các sản phẩm bản đồ (mô
hình số bề mặt, mô hình số độ cao, bản đồ trực ảnh, bản đồ 3D, video)[3].
Người sử dụng công nghệ này không nhất thiết phải có kiến thức quá sâu
về công nghệ đo ảnh truyền thống. Chính vì thế công nghệ UAV đang rất hứa
hẹn được ứng dụng rộng rãi hơn nữa vào các lĩnh vực khác nhau. Điểm cần bổ
sung hiện nay của công nghệ này, là quy trình tính toán, công nghệ thiết kế bay
chụp UAV sao cho đạt được độ chính xác mong muốn của các sản phẩm bản đồ,
cho từng mục đích cụ thể.
Tất cả những công trình nói trên, ở những mức độ khác nhau, đã giúp tôi
có một số tư liệu và kiến thức cần thiết để có thể hình thành những hiểu biết
chung, giúp tiếp cận và đi sâu nghiên cứu vấn việc “Sử dụng máy bay không
người lái chụp ảnh phục vụ trong nông nghiệp”
3. Mục tiêu nghiên cứu
- Xử lý hình ảnh của UAV
- Xác định vùng nhiễm sâu bệnh gây hại cho cánh đồng thông qua tính
toán chỉ số NDVI trích xuất ảnh chụp từ máy bay không người lái.
4. Đối tượng, phương pháp nghiên cứu
a. Đối tượng nghiên cứu - Cây lúa
- Thuốc bảo vệ thực vật
b. Phương pháp nghiên cứu
Phương pháp nghiên cứu tài liệu:
- Quy trình phun thuốc bảo vệ thực vật
- Tài liệu định hướng chỉ số khảo thực vật nhiễm sâu bệnh
- Phương pháp tính toán chỉ số thực vật phát hiện thành phần khác
biệt trên thảm thực vật
- Phương pháp khảo sát địa hình bằng phẳng
- Phương thức xử lý máy bay không người lái xác định vị trí chụp ảnh 3
Phương pháp nghiên cứu thực nghiệm:
- Nghiên cứu sử dụng dữ liệu ảnh gốc và ảnh sau khi chiết tế bào
thực vật gây hại, lưu trữ cho những lần cập nhật sau này.
- Nghiên cứu theo dõi quá trình vùng lúa tăng trưởng sau khi đã phân tích.
5. Phạm vi nghiên cứu
- Phạm vi nghiên cứu: hệ số tăng trưởng từng mùa vụ trước của cây lúa tại
địa phương, điển hình là cánh đồng lúa phía Nam
6. Nội dung nghiên cứu
Chương 1: Máy bay không người lái và phương pháp xử lý 1.1. Khái niệm UAV 1.2. Máy ảnh nhiệt 1.3. Ứng dụng thực tế
1.4. Tổng quan về phương pháp đo ảnh khảo sát địa hình bằng UAV 1.5. Chỉ số NDVI
Chương 2: Thực trạng, nguyên nhân của vấn đề nghiên cứu
2.1. Khảo sát địa hình thông qua phương pháp RTK
2.2. Thực nghiệm địa hình sau ảnh chụp từ drone & mẫu nghiên
cứu, phương pháp thu thập, đặc điểm, dữ liệu, phần mềm sử dụng, đối chiếu cơ sở lý thuyết
2.4 Xây dựng ảnh ghép trực giao Chương 3: Kết luận 4
CHƯƠNG 1: MÁY BAY KHÔNG NGƯỜI LÁI VÀ PHƯƠNG PHÁP XỬ LÝ ẢNH
1.1. Khái niệm Unmanned Aerial Vehicle(UAV)
Drone (UAV) là các loại phương tiện bay hay máy bay không người lái,
máy bay có điều khiển từ xa và không có sự hiện diện của con người ở bên trong
buồng lái. Drone có thể bao gồm nhiều loại với kích thước, hình dạng và đảm
nhiệm nhiều vai trò khác nhau. 1.2. Máy ảnh nhiệt
Thông thường các máy ảnh sử dụng để chụp ảnh mặt đất bằng UAV là các
loại máy ảnh kỹ thuật số có kích thước nhỏ gọn, có tiêu cự cố định và khả năng lấy nét tự động nhanh.
Máy ảnh nhiệt sử dụng ống kính chuyên dụng thu nhận tần số IR, cùng
với cảm biến nhiệt và bộ xử lý hình ảnh để hiển thị kết quả trên màn hình trực
quan. Khi máy ảnh hồng ngoại được gắn trên máy bay không người lái, thiết bị
thường được đặt trên gimbal, giúp ổn định hình ảnh và cho phép ống kính xoay 360 độ.
1.3. Ứng dụng thực tế
- Bay giám sát, theo dõi tiêu diệt mục tiêu trên không, hỗ trợ lực lượng mặt đất.
- Ghi lại và truyền hình ảnh video trực tiếp ở trên không.
- Hỗ trợ giao hàng tận nơi.
- Thu thập thông tin khí tượng, dự báo thời tiết.
- Tìm kiếm, cứu nạn khi các phương tiện khác không thể tiến vào.
- Hỗ trợ quay phim, chụp ảnh từ trên không.
- Xây dựng bản đồ, nhất là bản đồ 3D.
- Dùng trong nông nghiệp (rải phân bón, thuốc trừ sâu,...).
1.4. Tổng quan về phương pháp đo ảnh khảo sát địa hình bằng UAV
Để đạt được độ chính xác cao, dữ liệu bay chụp phải được hiệu chỉnh
bằng phương pháp đo động thời gian thực (RTK) hoặc đo động xử lý hậu kỳ
(PPK) hoặc cần điểm khống chế mặt đất.
Vậy, trong trường hợp không thể sử dụng phương pháp RTK hoặc PPK,
các kỹ sư cần phải sử dụng điểm khống chế để có độ chính xác cao hơn so với
việc đo bằng GPS độc lập. 5
Ngoài ra, các kỹ sư cũng phải thiết lập nhiều điểm khống chế, kết hợp với
phép đo RTK hoặc PPK từ trên không, nếu dữ liệu từ máy bay khảo sát phải
được căn chỉnh cho khớp với các phép đo trên mặt đất bằng máy toàn đạc hay máy thủy bình.
* Phương pháp RTK khảo sát địa hình. Đo động thời gian thực – phương pháp đo RTK
Phương pháp đo RTK là một kỹ thuật được sử dụng để nâng cao độ chính
xác của dữ liệu vị trí thu được từ các hệ thống định vị dựa trên vệ tinh, dựa trên
một trạm tham chiếu duy nhất hoặc trạm ảo nội suy để sửa các vị trí tâm ảnh khi
đang bay. Nói cách khác, RTK là một phương pháp hiệu chỉnh giúp nâng cao độ chính xác của GNSS. Nguyên lý hoạt động
Máy bay không người lái RTK, nó mang máy thu GNSS RTK. Nó thu
thập dữ liệu từ vệ tinh và trạm Base (trên mặt đất) để nâng cao độ chính xác vị
trí trên ảnh chụp trong thời gian thực khi nó bay.
Bản thân dữ liệu vệ tinh, và trong mọi trường hợp, dữ liệu vệ tinh dễ bị lỗi
do sự chậm trễ tầng đối lưu, v.v., cung cấp độ chính xác tối đa khoảng 1 mét
Dữ liệu từ trạm mặt đất được xác định để sửa lỗi tín hiệu vệ tinh, đưa độ
chính xác vị trí xuống phạm vi cm.
Trong trường hợp công nghệ Drone RTK, tín hiệu từ trạm Base GNSS
được kết nối với máy bay liên tục thông qua trạm Base của Drone đặt tại khu vực bay chụp.
Khi máy bay không người lái hạ cánh, nếu tất cả các tín hiệu không đổi,
dữ liệu ảnh có tọa độ chính xác tuyệt đối cho hậu xử lý để thành lập bản đồ.
Drone RTK cần 4 đường truyền tín hiệu không đổi trong quá trình đo đạc:
- Đường truyền tín hiệu giữa vệ tinh và máy bay không người lái
- Đường giữa vệ tinh và trạm Base GNSS hoặc mạng CORS (hỗ trợ VRS qua di động)
- Đường giữa trạm Base GNSS hoặc CORS / VRS và trạm Base Drone
- Đường truyền tín hiệu giữa trạm Base Drone và Drone.
Kỹ thuật Drone RTK rất tốt nếu như các đường truyền tín hiệu được kết
nối liên tục. Tuy nhiên, trong điều kiện thực tế sẽ có một số trục trặc như có
chướng ngại vật chặn tín hiệu. Hoặc máy bay bay xa vùng phủ của tín hiệu. Lúc
này, tín hiệu bị ngắt quãng và ảnh chụp sẽ mất độ chính xác như kỳ vọng. Trong
trường hợp tốt nhất, tín hiệu giữa Base GNSS và máy bay được kết nối liên tục,
độ chính xác sẽ giống như phương pháp PPK. 6
Ưu điểm phương pháp đo RTK:
- Giảm thiểu nguy hiểm vì nó không yêu cầu con người qua các địa hình hiểm trở để rải GCP
- Tiết kiệm thời gian so với GCP, làm cho quá trình năng suất và hiệu quả hơn
- Cung cấp các hiệu chỉnh thời gian thực cho máy bay không người lái tại chỗ
- Lý tưởng để thu vị trí với độ chính xác tuyệt đối trong suốt các chuyến bay trong thời gian thực
- Không cần xử lý hậu kỳ GNSS với hiệu chỉnh thời gian thực
Nhược điểm phương pháp đo RTK:
- Khái niệm mới về máy bay không người lái, không được chấp nhận một
cách dễ dàng, đặc biệt là vì bản thân công nghệ máy bay không người lái vẫn được coi là mới
- Yêu cầu trạm base, thiết bị đặc biệt và kết nối ổn định để xử lý dữ liệu trong thời gian thực
- Không thể giữ lại dữ liệu mới hoặc cũ để chứng thực trách nhiệm
- Không hoạt động cùng công trường như thiết bị ngoại vi
- Khả năng trục trặc vừa phải
Các phương pháp đo RTK hoạt động tốt ở địa hình bằng phẳng, nơi cây cối
hoặc núi non cản trở tín hiệu liên lạc. RTK bị hạn chế bởi tốc độ của liên lạc mặt
đất và trên không với UAV. Nếu xa hơn ba km giữa máy bay không người lái và
trạm mặt đất hoặc nếu có vật cản như cây cối hoặc núi, sẽ dễ mất tín hiệu.
Để sử dụng RTK, các chuyến bay ở địa hình khoáng và trong phạm vi hai
hoặc ba km tính từ trạm mặt đất là lý tưởng. 1.6. Chỉ số NDVI
Công thức: NDIV = (IR - R) / (IR + R)
Trong đó IR là giá trị bức xạ của bước sóng cận hồng ngoại (near
infrared), R là giá trị bức xạ của bước sóng nhìn thấy (visible).Chỉ số thực vật
được dùng rất rộng rãi để xác định mật độ phân bố của thảm thực vật, đánh giá
trạng thái sinh trưởng và phát triển của cây trồng, làm cơ sở số liệu để dự báo
sâu bệnh, hạn hán, diện tích năng suất và sản lượng cây trồng… 7
Hình 1.1 Một bản đồ NDVI được thu lại từ drone 8
CHƯƠNG 2: THỰC TRẠNG, NGUYÊN NHÂN CỦA VẤN ĐỀ NGHIÊN CỨU
2.1. Khảo sát địa hình thông qua phương pháp RTK
Hệ thống định vị RTK sử dụng các thuật toán tham chiếu và cung cấp các
số liệu được hiệu chỉnh tự động theo thời gian thực. Nhờ vậy dữ liệu về vị trí thu
được chính xác đến cấp độ cm nên được ứng dụng trong nhiều lĩnh vực. Đặc
biệt là lĩnh vực nông nghiệp.
Thay thế công nghệ GPS cũ khắc phục một số bất cập về việc sử dụng
Drone trong nghiệp ở Việt Nam:
- Độ sai lệch lớn từ 1,5m – 7,5m.
- Diện tích cây ăn trái trồng không đều, không thẳng hàng nhau.
- Địa hình đa dạng từ đồi núi đến đồng bằng.
- Đồng ruộng chưa được quy hoạch, nhiều chướng ngại vật nguy
hiểm và thiết bị gây nhiễu.
Hình 2.1. Mô hình sắp xếp sử dụng phương pháp RTK
Một hệ GNSS hoàn chỉnh gồm ba phần cơ bản là đoạn không gian, đoạn
điều khiển mặt đất, đoạn người sử dụng:
- Đoạn không gian là các vệ tinh bay quanh trái đất với quỹ đạo và
độ cao nhất định đã được quy định. Các vệ tinh này bố trí sao cho một
máy thu tại một thời điểm bất kỳ, một vị trí bất kỳ luôn nhìn thấy 4 vệ tinh.
- Đoạn điều khiển mặt đất là các trung tâm điều khiển, các trạm
giám sát đặt trên trái đất. Mục đích trong phần này là kiểm soát vệ tinh đi
đúng hướng theo quỹ đạo và thông tin thời gian chính xác.
- Đoạn người sử dụng là thiết bị nhận tín hiệu vệ tinh GNSS và
người sử dụng thiết bị này 9
2.2. Thực nghiệm địa hình sau ảnh chụp từ drone & mẫu nghiên cứu,
phương pháp thu thập, đặc điểm, dữ liệu, phần mềm sử dụng, đối chiếu cơ sở lý thuyết
2.2.1. Phương pháp so sánh
Số liệu đo vẽ sử dụng máy toàn đạc là số liệu chuẩn để so với số
liệu của phương pháp đo vẽ sử dụng GPS động.
Giả sử ta có A(X1, Y1); A(X2,Y2), điểm A là điểm được đo sử
dụng GPS động và được đo kiểm chứng sử dụng máy toàn đạc điện tử. Ta có công thức: = Mp (1)
X1, Y1 tọa độ điểm A đo sử dụng GPS động
X2,Y2 tọa độ điểm A được đo kiểm chứng sử dụng máy toàn đạc điện tử
Mp: Sai số trung bình vị trí điểm A qua 2 lần đo
Sau khi thu thấp số liệu ta tiến hành so sánh các chỉ tiêu theo tỷ lệ khu đo
như về hiệu quả kỹ thuật, thời gian đo đạc thực địa, nhân lực và hiệu quả kinh tế. Cụ thể:
- So sánh về hiệu quả kỹ thuật giữa hai phương pháp, và so sánh
với sai số trung bình Mp thực đo công thức (1) với sai số trung bình Mp
mà quy phạm thành lập bản đồ do Bộ Tài nguyên và Môi trường năm 2008 quy định.
- So sánh về thời gian đo đạc thực địa của hai phương pháp. Cùng
một số lượng điểm đo thì phương pháp đo nào mất nhiều thời gian hơn.
- So sánh về nhân lực thực địa giữa hai phương pháp. Cùng một
khối lượng công việc như nhau thì phương pháp nào sử dụng nhân lực
thực thi thực địa ít hơn.
- So sánh về hiệu quả kinh tế giữa hai phương pháp. Bao gồm chi
phí về mua thiết bị, chi phí đào tạo, chi phí phải trả cho nhân lực thực hiện công trình.
2.2.2. Phương pháp đánh giá
Phương pháp này ta lấy sai số điểm thực đo Mp ở công thức (1) để
đánh giá hiệu quả kỹ thuật giữa hai phương pháp đo với sai số trung bình
Mp mà quy phạm thành lập bản đồ do Bộ Tài nguyên và Môi trường năm
2008 quy định. Trên cơ sở sử dụng kiểm định t đối với một mẫu quan sát (One-Sample T test). 10
Đồng thời đánh giá về thời gian đo ngoại nghiệp, nhân lực và kinh
phí của từng tỷ lệ khu đo.
Khu đo là khu dân cư xen lẫn vườn cây; khu đất vườn và đất trồng
lúa thì sai số điểm của phương pháp đo GPS động về hiệu quả kỹ thuật
như thế nào so với phương pháp đo vẽ toàn đạc. Phương pháp đo nào
chiếm ưu thế hơn, sử dụng kinh phí ít hơn, thời gian và nhân lực thực thi ngoài thực địa ít hơn.
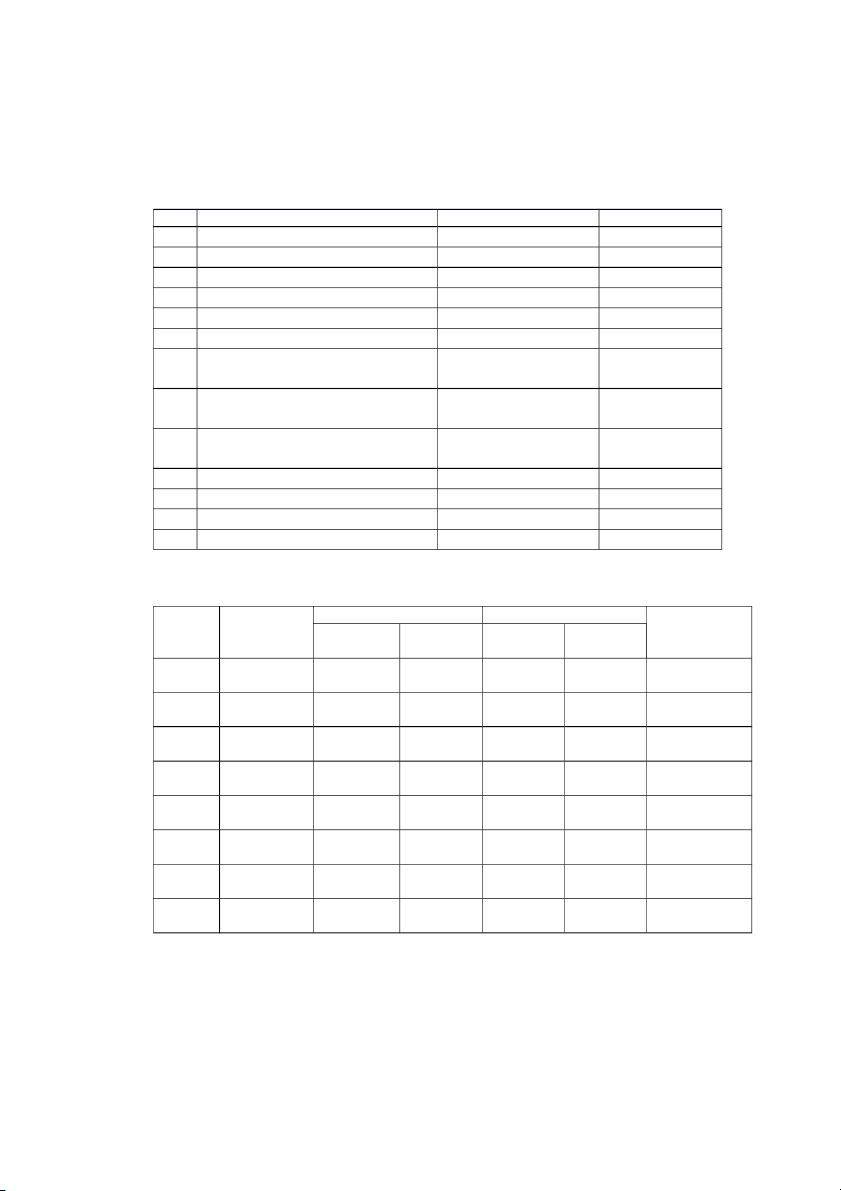
2.2.3. Bảng số liệu Hạng mục Số điểm đo GPS Số điểm đo Diện tích (ha) Khu đo động toàn đạc Lưới KV1 20 20 - - Lưới KV2 09 09 - - Chi tiết 1000 242 242 12.816 Đất ở nông thôn Chi tiết 2000 469 469 82.352 Đất ở vườn lúa
2.2.4. So sánh sai số trung bình Mp thực đo với sai số Mp quy phạm thành
lập bản đồ địa hình
Nhằm mục đích xem xét có hay không sự khác biệt giữa giá trị trung bình
của giá trị sai số Mp thực đo ở công thức (1) sau đây được gọi tắt là (Mp_tđo) và
giá trị sai số Mp mà quy phạm thành lập bản đồ do Bộ Tài nguyên và Môi
trường quy định đối với từng tỷ lệ khác nhau, sau đây được gọi tắt là
Mp_qpham. Ta tiến hành thực hiện phép thống kê đối với 1 mẫu quan sát là giá
trị sai số Mp_tdo so với giá trị Mp_qpham đã biết. Với “giả thuyết đặt ra là
Mp_tđo và Mp_qpham là bằng nhau”
Khi đo tỷ lệ 1/2000 khu đất trồng lúa:
- Qua kết quả thống kê cho thấy t = -37.70 với p=0.000<0.05. Như vậy ta
bác bỏ giả thuyết đặt ra ban đầu và kết luận rằng giá trị sai số Mp_tđo khác
Mp_qpham. Cụ thể sai số vị trí điểm trung bình Mp thực đo bằng 0.145 m. Sai
số trung bình vị trí điểm cho phép trong quy phạm là 0.450 m. Như vậy sai số vị
trí điểm trung bình khu đo tỷ lệ 1/2000 lúa là nhỏ hơn so với sai số vị trí điểm
trong quy phạm thành lập bản đồ địa hình.
- Do việc đo đạc, lưu số liệu đo một cách tự động nên đã giảm tối đa ảnh
hưởng của sai số do người đo đến kết quả đo, độ tin cậy của số liệu đo được
nâng cao cả về định tính (tính chất điểm đo) và định lượng (tọa độ). Việc thu
nhập tính chất điểm đo được tiến hành bằng việc mã hóa điểm đo trực tiếp nên
rất cụ thể, ít sai sót. Điều này rất quan trọng khi xử lý số liệu trên phần mềm đo
vẽ bản đồ số tự động. 11
- Không cần lập lưới khống chế đo vẽ khi sử dụng kỹ thuật đo GPS động
đo vẽ bản đồ tỷ lệ lớn, về kinh phí giảm khá lớn, thêm vào việc giảm tối đa nhân
công, giảm thời gian thi công thực địa, tăng chất lượng đo vẽ.
- Qua thực tế kiểm chứng cho thấy rằng khi sử dụng phương pháp đo GPS
- RTK đối với khu đo bản đồ tỷ lệ 1/2000 là vườn cây và đất trồng lúa thì thời
gian đo đạc thực địa được rút ngắn và số lượng nhân lực trong tổ đo ít hơn. Cụ
thể đối với khu đo tỷ lệ 1/2000 với số lượng điểm đo gần 500 điểm sử dụng
phương pháp GPS-RTK chỉ mất 02 ngày với 03 kỹ thuật viên và cũng tương tự
như số lượng điểm trên sử dụng phương pháp toàn đạc phải mất tới 06 ngày với
03 kỹ thuật viên. Như vậy qua kiểm chứng thực tế giữa hai phương pháp có thể
kết luận rằng phương pháp đo sử dụng GPS động trong đo vẽ bản đồ địa chính
thời gian đo thực địa chỉ bằng 1/3 và nhân lực bằng 1/2 so với phương pháp đo
sử dụng máy toàn đạc điện tử. (Cụ thể xem Bảng 3)
- Với những ưu thế về độ chính xác của số liệu, thời gian thực thi thực địa
được rút ngắn và chi phí phải trả cho nhân lực ít cho thấy sử dụng phương pháp
đo GPS động đạt hiệu quả kinh tế hơn so với phương pháp toàn đạc điện tử. Tuy
chi phí đầu tư cho thiết bị GPS cao hơn nhưng để cạnh tranh với các công ty
khác trong cùng lĩnh vực và có được các dự án đo đạc lớn thì việc đầu tư trên là cần thiết. Hạng Đo GPS động Đo toàn đạc điện tử mục Số Thời Nhâ Diện Kinh Số điểm Thời Nhâ Diện Kinh điểm gian n lực tích phí mia gian n lực tích phí mia (ngày) (người (ha) (ngày) (ngày) (người (ha) (đồng/ha) ) ) Đo 29 02 03 82.35 1,201.5 29 04 03 82.35 1,522,359 lưới 2 38 2 Đo 469 02 03 82.35 1,201.5 469 06 03 82.35 20,887.094 chi 2 38 2 tiết 1/20 00
- Từ kết quả so sánh sai số vị trí điểm trung bình Mp_tdo với giá trị
Mp_qpham đã biết ở trên cho ta thấy đối với khu đo tỷ lệ 1/2000 cho cả khu đo
đất vườn và đất ruộng lúa thấy rằng sai số khi đo tỷ lệ 1/2000 là nhỏ hơn so với
sai số quy phạm thành lập bản đồ địa chính cho phép. Vậy phương pháp đo sử
dụng công nghệ GPS-RTK trong thành lập bản đồ địa chính khu đo tỷ lệ 1/2000
đáp ứng tốt độ chính xác về mặt kỹ thuật. Khảo sát địa hình đồng lúa bước đầu 12
cho thấy tỷ số hợp lệ trước khi đưa ra mô hình phân tích chi tiết chỉ số thực vật trên ảnh NDVI.
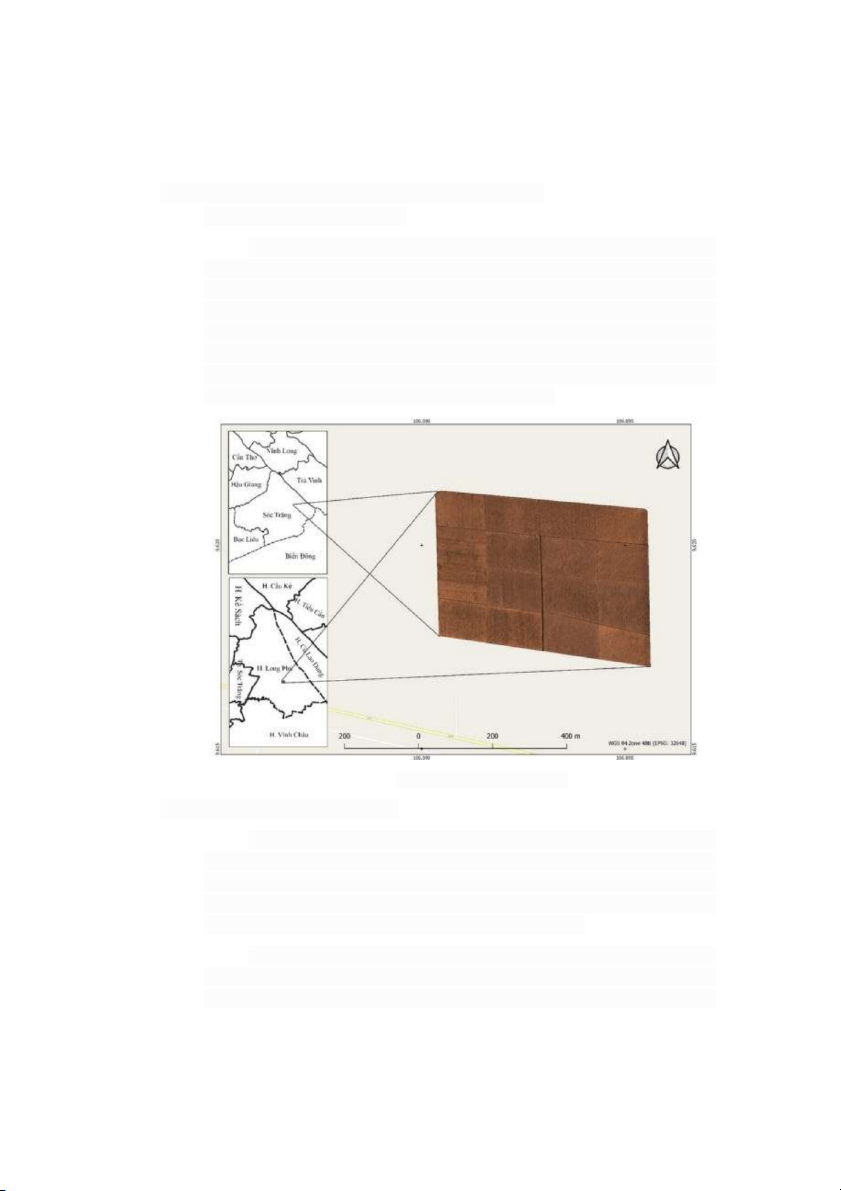
2.2.5. Thu thập dữ liệu và điều tra khảo sát thực địa
a. Thu thập dữ liệu ảnh UAV
Dữ liệu ảnh UAV được thu thập bởi thiết bị DJI Inspire 2, sử dụng
cảm biến Sentera Double 4K được thiết kế đặc biệt dùng trong lĩnh vực
nông nghiệp, có khả năng ghi lại 3 kênh phổ (kênh phổ giả DNred,
DNGreen, DNBlue) dưới định dạng *.jpg, trong đó có 2 kênh phổ được
sử dụng để tính toán các chỉ số thực vật (NDVI và NDRE). Ảnh này cần
phải thực hiện một số phép tính (Band math) để tách các kênh phổ
DNRed, DNGreen, DNBlue gốc thành kênh phổ Đỏ (Red), kênh phổ rìa
Đỏ (RedEdge) và kênh phổ cận hồng ngoại (NIR).
Hình 2.2. Bản đồ nghiên cứu
2.2.6 Điều tra, khảo sát thực địa
Nghiên cứu thực hiện khảo sát tại 15 điểm trong khu vực nghiên
cứu, số liệu về hiện trạng sâu bệnh được mô tả bởi chuyên gia tại Chi cục
Trồng trọt và Bảo vệ thực vật ở địa phương, được thực hiện theo quy
chuẩn Việt Nam năm 2014 về “Về phương pháp điều tra phát hiện dịch
hại lúa” của Bộ Nông nghiệp và Pháp triển Nông thôn.
Thời gian khảo sát thực địa được thực hiện cùng lúc với thời gian
thu thập ảnh. Đối tượng điều tra là các yếu tố đại diện có liên quan đến
dịch hại, bao gồm thông tin dịch hại: sâu bệnh, dịch bệnh; các thông tin về 13
cây lúa: giống, thời vụ, giai đoạn sinh trưởng, phát triển của cây lúa và tập
quán canh tác; kết hợp với thông tin địa lý như tọa độ và ảnh chụp hiện
trạng mặt đất. Từ đó, tính toán, thống kê các thông số về mật độ, số lượng
sâu bệnh, tỷ lệ dịch hại. Thông qua đó, phân cấp các mức độ nhiễm dịch
hại: nhiễm nhẹ, nhiễm trung bình, nhiễm nặng và thống kê diện tích
nhiễm được thực hiện theo
2.4 Xây dựng ảnh ghép trực giao (Orthomosaic)
Quá trình xây dựng ghép ảnh trực giao (Orthomosaic) được thực hiện trên
phần mềm Agisoft PhotoScan/Metashape. Mục đích của quá trình này dùng để
ghép ảnh, sửa lỗi hình học, sự biến dạng hình học của ảnh ban đầu, quá trình xử
lý càng chi tiết thì độ sai lệch hình học càng thấp, đảm bảo tính chính xác của
ảnh cũng như vị trí của ảnh.
Quy trình xử lý ảnh ghép trực giao bao gồm 5 bước chính: 1. Thêm ảnh
(add photos), 2. Liên kết ảnh (align photos), 3. Xây dựng đám mây điểm dày đặc
(build dense cloud), 4. Xây dựng mô hình số bề mặt (digital surface model –
DSM), 5. Tạo ảnh ghép trực giao, quy trình thực hiện được thể hiện trong Hình
Hình 2.3. Quá trình xây dựng ánh ghép trực quan
Chỉ số NDVI được tính theo công thức sau:
Red = -0,966 * Dnblue + 1,00 * Dnred
NIR = 4,350 * Dnblue - 0,286 * Dnred
NDVI =(NIR - Red) / (NIR + Red)
Công thức tích chỉ số NDRE gần giống như chỉ số khác biệt thực vật,
nhưng sử dụng tỷ số giữa kênh phổ gần hồng ngoại và kênh phổ rìa đỏ, được xác
định bởi công thức sau: 14
RedEdge = - 0,956 * Dnblue + 1,00 * Dnred
NIR = 2,426 * Dnblue – 0,341 * Dnred
NDRE = (NIR – RedEdge) / (NIR + RedEdge) 15
CHƯƠNG 3: KẾT QUẢ ĐÁNH GIÁ QUAN HỆ GIỮA GIÁ TRỊ
NDVI/NDRE VỚI MỨC ĐỘ NHIỄM HẠI CỦA CÂY LÚA
Sau khi chỉ số NDVI và NDRE được tạo thành, sử dụng công cụ “Point
Sampling tool” trên phần mềm Qgis để trích xuất giá trị NDVI và NDRE tại 15
điểm khảo sát nhằm kết nối thông tin trên ảnh và hiện trạng nhiễm bệnh trên mặt
đất. Đồng thời kết hợp phương pháp kiểm định Anova (kiểm định giữa biến định
lượng “biến giá trị NDVI/NDRE” và biến định tính “biến mức độ nhiễm dịch
hại trên lúa”) trên phần mềm thống kê “IBM SPSS Statistics” để phân tích mối
quan hệ giữa chỉ số NDVI và NDRE với mức độ lúa nhiễm dịch hại (Sow, 2014).
Dựa vào mức ý nghĩa (Significance) để xác định giữa giá trị NDVI/NDRE
và mức độ lúa nhiễm dịch hại có mối quan hệ hay không, nếu hệ số Significance
(Sig.) p < 0,05 thì xác định giữa giá trị NDVI/NDRE và mức độ nhiễm dịch hại
có mối quan hệ; ngược lại p > 0,05 sẽ không xảy ra mối quan hệ. Thông qua hệ
số ảnh hưởng (Eta Squared) giúp xác định mức độ mối hệ giữa giá trị
NDVI/NDRE và mức độ nhiễm dịch hại (Sow, 2014).
Kết quả khảo sát thực địa (dựa theo phương pháp điều tra QCVN 01-166:
2014/BNNPTNT) tại 15 điểm khảo sát, được thể hiện trong Hình 3, Hình 4 cho
thấy diện tích lúa bị ảnh hưởng bởi dịch hại nhiều nhất (sâu cuốn lá, bệnh đạo ôn
và bệnh cháy lá) ở giai đoạn đẻ nhánh (30 ngày tuổi), trong đó tổng diện tích
nhiễm bệnh 10,7 ha, chiếm 45,15%, phần lớn các trà lúa nhiễm bệnh ở cấp độ nhẹ (6 ha).
Ở các giai đoạn tiếp theo (lúa 43 ngày và 50 ngày tuổi) tình hình nhiễm
bệnh có xu hướng giảm do dịch bệnh được kiểm soát và bổ sung diện tích lúa bị
nhiễm nặng. Ở giai đoạn đẻ nhánh, sinh vật gây hại chính là sâu cuốn lá và bệnh
đạo ôn lá, sâu cuốn lá phổ biến từ tuổi 1 đến tuổi 4 và bệnh đạo ôn đang gây hại
tập trung nhiều ở các trà lúa cấy dặm với mức độ nhiễm từ trung bình đến nặng.
Riêng đối tượng rầy nâu có mật độ dưới ngưỡng gây hại, chủ yếu là rầy nâu tuổi
2,3,4 và rầy trưởng thành mang trứng.
Hình 3.1. Biểu đồ diện tích lúa nhiễm dịch hại 16
Hình 3.2. Mức độ nhiễm dịch hại trên lúa Lớp Chỉ số Mô tả 1 (-0.00157) – (-0.00133) Độ ẩm rất thấp 2 (-0.00133) – (+0.0084) Độ ẩm thấp 3 (+0.0084) – (+0.0155) Trung bình 4 (+0.0155) – (+0.0243) Độ ẩm cao 5 > (+0.0243) Độ ẩm rất cao 17
Tình hình sử dụng thuốc sinh học và phối hợp thuốc sinh học với thuốc hóa học trong trừ sâu tơ TT Chỉ tiêu
Số hộ nông dân điều tra Tỉ lệ % 1 Nồng độ phun 400 100
Giữ nguyên nồng độ hướng dẫn 116 29
Tăng nồng độ thuốc khi phun 296 71 2
Quyết định thời gian phun 400 100
Phun trước khi có sâu phá hại 6 1,5
Tự điều tra thấy thì phun 278 69,5
Phun theo hướng dẫn của cơ 116 29 quan chuyên môn
Thấy người khác phun thì phun 0 0 theo 3
Dùng loại thuốc để phun sâu 400 100 tơ Thuốc hóa học 322 80,5 Thuốc sinh học 75 18,75 Thuốc thảo mộc 3 0,75 Ông ký sinh 0 0 Kỳ điều Ruộng đối Ruộng nông dân Ruộng mô hình Ghi chú tra chứng Mật độ Hiệu lực Mật độ Hiệu lực (con/m2) (con/m ) 2 (con/m ) 2 (con/m ) 2 (con/m ) 2 1 25,1 19,8 24,30 Phun neem – Bt lần 01 2 26,5 4,7 77,51 18,20 29,06 Sau phun lần 1 7 ngày 3 35,7 12,8 54,54 16,00 53,70 Sau phun lần 1 14 ngày 4 31,0 16,9 30,89 18,7 37,69 Phun neem – Bt lần 02 5 32,8 6,7 74,10 17,9 43,63 Sau phun lần 2 7 ngày 6 36,6 12,7 56,01 16,6 53,02 Sau phun lần 2 14 ngày 7 31,5 17,0 31,58 17,8 41,63 Sau phun lần 2 21 ngày 8 28,2 8,2 63,13 18,1 33,70 Sau phun lần 2 28 ngày
Bảng Diễn biến mật độ sâu tơ và hiệu lực phòng trừ sâu tơ bằng nước chiết từ lá
cây neem kết hợp với thuốc sinh học 18
- Dùng nước chiết từ lá cây Neem kết hợp với thuốc sinh học Bt pha theo tỷ
lệ 10g pha vào 8 lít nước dung dịch, thả ong ký sinh bản địa để phòng trừ
sâu tơ với số lượng 30.000c/ ha, xử lý 02 lần/vụ bắp cải có tác dụng
khống chế được mật độ sâu tơ trên đồng ruộng dưới ngưỡng gây hại.
- Dùng biện pháp sinh học bằng nước chiết từ lá cây Neem kết hợp thuốc
sinh học Bt và mô hình ong ký sinh bản địa để phòng trừ sâu tơ tạo ra sản
phẩm rau an toàn, góp phần bảo vệ sức khỏe con người, bảo vệ môi
trường, lập lại hệ cân bằng sinh thái, từng bước xây dựng nền sản xuất
nông nghiệp sạch bền vững. 19
KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN 1. Kết luận
Qua quá trình nghiên cứu, em đã vận dụng phương pháp khảo sát địa hình
và kỹ thuật phân tích chỉ số thực vật NDVI để thiết lập đánh giá phát hiện sâu
bệnh từ máy bay không người lái. Kết quả đạt được bao gồm: Lý thuyết:
- Phát biểu và mô tả được hệ thống định vị RTK
- Tìm hiểu cách thức lắp đặt máy ảnh nhiệt trên Drone.
- Phân tích thiết kế dữ liệu ảnh hoàn chỉnh, dùng cho việc phân tích chỉ số thực vật Chương trình:
- Sử dụng máy bay không người lái;
- Phần mềm tính toán chỉ số thực vật BandMath 2;
- Thử nghiệm với một số dữ liệu ảnh đơn lập trên trình tính cho ra
kết quả, đáp ứng được các yêu cầu bài toán đặt ra, tìm điểm khác cấu trúc
để phát hiện sâu bệnh, tính toán khả năng tăng trưởng của cây lúa theo mùa vụ.
2. Hướng phát triển
Do thời gian còn hạn chế nên đề tài chưa nghiên cứu chuyên sâu về sự
tương quan giữa các yếu tố khí tượng thủy văn, địa hình, thổ nhưỡng,... Ảnh có
mây nên kết quả tính toán chưa hoàn toàn chính xác. Bộ công cụ cần được chỉnh
sửa thêm để nhanh nhạy và chuyên nghiệp hơn nữa. Nghiên cứu cần có thêm số
liệu về sản lượng nông nghiệp trong lưu vực để làm rõ về mối quan hệ giữa hạn
nông nghiệp với sản lượng nông nghiệp để đưa ra dự báo, cảnh báo về mùa vụ. 20 TÀI LIỆU THAM KHẢO
[1] Nguyễn Đ. Đ. và Bùi N. Q., ‘Cơ sở khoa học phương pháp đo ảnh chụp từ
thiết bị bay không người lái UAV’, 2020
[2] Mai V. S., Bùi N. Q., Phạm V. H., và Lê Đ. Q., ‘Nghiên cứu sử dụng dữ liệu
ảnh máy bay không người lái (UAV) trong thành lập bản đồ địa hình tỷ lệ lớn’, 2017
[3] ‘Giới thiệu công nghệ viễn thám sử dụng uav trong khảo sát xây dựng bản đồ
3d bằng tích hợp bản đồ số, công nghệ viễn thám và gis’, 2022.
[4] ‘Máy bay không người lái “Made in Việt Nam”’, Báo Nhân Dân. 438716/ (accessed Jun. 15, 2022). 21
Tài liệu liên quan:
-

Tổng hợp câu hỏi từ goconqr | Trường Đại học Phú Yên
353 177 -

Giáo trình tìm hiểu lập trình trên android | Trường Đại học Phú Yên
248 124 -

Đề tài: Xây dựng hệ thống khảo sát trường học tại đại học phú yên bằng ngôn ngữ lập trình PHP | Đại học Phú Yên
235 118 -

Nền tảng điện toán đám mây di động - Information Technology | Đại học Phú Yên
274 137 -

Cấu trúc cơ bản của di động thông minh - Information Technology | Đại học Phú Yên
212 106