Đề thi trắc nghiệm môn Vi điều khiển | Đại học Bách khoa Thành phố Hồ Chí Minh
Đề thi trắc nghiệm môn Vi điều khiển của Đại học Bách khoa Thành phố Hồ Chí Minh. Tài liệu được biên soạn dưới dạng file PDF gồm 18 trang giúp bạn tham khảo, ôn tập và đạt kết quả cao trong kỳ thi sắp tới. Mời bạn đọc đón xem!
Môn: Vi điều khiển 1 tài liệu
Trường: Trường Đại học Bách khoa - Đại học Quốc gia Thành phố Hồ Chí Minh 721 tài liệu
Tác giả:

















Preview text:
Đề thi Vi điều khiển (ME3007) HK211
Câu 1. Chân có ký hiệu RE3/MCLR/VPP của vi điều khiển PIC16F887 có chức năng:
a. Reset hoạt động của VDK
b. Cấp nguồn cho vi điều khiển
c. Nạp chương trình cho vi điều khiển
d. Cả 3 câu trên đều sai
Câu 2. Điện trở kéo lên có đặc điểm sau:
a. Một đầu nối với nguồn 5v, đầu còn lại nối với đất
b. Một đầu nối với nguồn 5v, đầu còn lại nối với một nút nhấn, và đầu thứ hai của
nút nhấn nối với đất
c. Một đầu nối với đất, đầu còn lại nối với một nút nhấn, và đầu thứ hai của nút
nhấn được nối với nguồn 5v
d. Cả 3 câu trên đều sai
Câu 3. Một nút nhấn được nối với điện trở kéo lên là loại nút nhấn: a. Tích cực mức thấp b. Tích cực mức cao c. Tích cực trung gian
d. Cả 3 câu trên đều sai
Câu 4. Linh kiện 7SEG-MPX1-CC là led 7 đoạn loại: a. Anode chung b. Catode chung
c. Vừa Anode chung vừa Catode chung
d. Cả 3 câu trên đều sai
Câu 5. Led 7 đoạn loại anode chung có đặc điểm sau:
a. Chân chung nối với nguồn 5v
b. Chân chung nối với đất
c. Chân chung để trôi nổi
d. Cả 3 câu trên đều sai
Câu 6. Sở dĩ người ta gọi một led là led 7 đoạn vì:
a. Nó gồm 7 đoạn led đơn nối chung với nhau b. Nó có 7 chân c. Nó có 7 hình số 7
d. Cả 3 câu trên đều sai
Câu 7. Giả sử chúng ta có linh kiện 7SEG-MPX6-CC và một VDk PIC16F887, phát
biểu nào sau đây là chính xác:
a. Không thể dùng một VDK PIC16F887 để điều khiển linh kiện 7SEG-MPX6-
CC vì VDK không đủ số chân để điều khiển
b. Có thể dùng một VDK PIC16F887 để điều khiển linh kiện 7SEG-MPX6-CC
thông qua giải thuật quét LED
c. Cả 2 câu A và B đều đúng
d. Cẩ 2 cấu A và B đều sai
Câu 8. Phát biểu nào sau đây đúng nhất về ngắt:
a. Ngắt đóng vai trò quan trọng trong việc thiết kế và thực hiện các ứng dụng của bộ vi điều khiển
b. Ngắt cho phép hệ thống đáp ứng một sự kiện theo cách không đồng bộ và xử lý
trong khi một chương trình khác đang thực thi
c. Một hệ thống được điều khiển bởi ngắt cho ta ảo tưởng đang làm nhiều công việc đồng thời
d. Cả 3 câu trên đều đúng
Câu 9. Vi điều khiển PIC16F887 không có ngắt nào sau đây: a. Ngắt ngoài b. Ngắt PORT B
c. Ngắt do truyền nhận nối tiếp EUSART d. Ngắt do Timer 3
Câu 10. Để sử dụng một loại ngắt trong VDK PIC16F887, chúng ta phải:
a. Kích khởi bit cho phép ngắt toàn cục GIE, kích khởi bit cho phép loại ngắt mà chúng ta muốn sử dụng
b. Kích khởi bit cho phép loại ngắt mà chúng ta muốn sử dụng
c. Kích khởi bit cho phép sự dụng ngắt ngoài, kích khởi bit cho phép loại ngắt mà chúng ta muốn sử dụng
d. Cả 3 câu trên đều sai
Câu 11. Thanh ghi điều khiển ngắt INTCON (Interrupt Control Register) của
PIC16F887 có địa chỉ là 06h và thứ tự các bit nhưu sau: Global Interrupt Enable bit
(bit 7), Peripheral Interrupt Enable bit (bit 6), Timer0 Overflow Interrupt Enable bit
(bit 5), INT External Interrupt Enable bit (bit 4), PORTB Change Interrupt Enable bit
(bit 3), INT External Interrupt Flag bit (bit 1), PORTB Change Interrupt Flag bit (bit
0). Câu lệnh “INTCON=0b11111000” cho phép sử dụng loại ngắt nào sau đây: a. Ngắt port B b. Ngắt timer 0 c. Ngắt ngoài d. Cả 3 loại ngắt trên
Câu 12. Vi điều khiển PIC16F887 dạng TQFP có các đặc điển sau: a. có 44 chân b. có 4 hàng chân
c. không cần khoan lỗ khi gia công mạch in
d. cả 3 câu trên đều đúng
Câu 13. Đối với VDK PIC16F887, câu lệnh “Ext_int_edge(H_to_L)” có ý nghĩa:
a. ngắt ngoài xảy ra khi có sự chuyển tín hiệu từ cao xuống thấp tại chân RB0 (chân ngắt ngoài)
b. ngắt ngoài xảy ra khi có sự chuyển tín hiệu từ thấp lên cao tại chân RB0 (chân ngắt ngoài)
c. ngắt ngoài xảy ra khi chân RB0 (chân ngắt ngoài) ở mức cao
d. ngắt ngoài xảy ra khi chân RB0 ( chân ngắt ngoài) ở mức thấp
Câu 14. Phát biểu nào sau đây không đúng về ngắt:
a. Ngắt ngoài và ngắt port B đều là ngắt ngoài
b. Ngắt ngoài và ngắt port B hoạt động giống nhau
c. Ngắt ngoài và ngắt port B hoạt động khcas nhau vì ngắt ngoài xảy ra khi có sự
chuyển trạng thái từ cao xuống thấp hoặc từ thấp lên cao, còn ngắt PORTB xảy
ra khi có sự thay đổi trạng thái tại chân ngắt
d. Ở VDK PIC 16F887, ngăt ngoài và ngắt PORTB đều sử dụng các chân của PORT B
Câu 15. Phát biểu nào sau đây đúng nhất về bộ định thời (Timer)
a. Một bộ định thời là một chuỗi các flipflop với mỗi flipflop là một mạch chia 2,
chuỗi này nhận một tín hiệu ngõ vào làm nguồn xung clock
b. Một bộ định thời là một đồng hồ báo thức
c. Một bộ định thời là một mạch điện gồm một IC thời gian thực
d. Cả 3 câu trên đều sai
Câu 16. Hình dưới mô tả nguyên lý hoạt động của một bộ định thời: a. 2 bit b. 1 bit c. 4 bit d. 5 bit
Câu 18. Nêu sự khác nhau giữa Timer1 và Timer2 của PIC16F887
a. Timer1 là timer 16 bit, Timer2 là timer 8 bit
b. Timer 1 chỉ có hệ số pre-scale, Timer2 có hệ số pre-scale và post-scale
c. Timer1 dùng để định thời thông thường, Timer2 chuyên dùng để tạo xung điều khiển động cơ
d. Cả 3 câu trên đều đúng
Câu 19. Module ADC ở VDK PIC16F887 cho phép chuyển đổi một tín hiệu tương tự
ở đầu vào thành một biểu diễn dưới dạng tín hiệu số: a. 8 bit b. 9 bit c. 10 bit d. Cả A và C đều đúng
Câu 20. Để gán giá trị điện áp tham chiếu âm cho module ADC từ một điện áp bên ngoài thì chúng ta phải: a. Gán bit VCFG1=0 b. Gán bit VCFG1=1 c. Gán bit VCFG0=0 d. Gán bit VCFG0=1
Câu 22. Phát biểu nào sau đây không đúng về module truyền thông nối tiếp đồng bộ -
bất đồng bộ (EUSART) của VDK PIC16F887:
a. Có khả năng truyền nhận dữ liệu bất động bộ ở chế độ full-duplex
b. Có khả năng truyền nhận dữ liệu đồng bộ ở chế độ haft-duplex
c. Chiều dài ký tự truyền có thể là 8 bit hoặc 9 bit
d. Không có khả năng phát hiện lỗi khi truyền nhận
Câu 23. Một chân có ký hiệu RAS/AN4/SS/C2OUT của vi điều khiển.phát biểu nào sau đây không đúng
a. Chân này có thể sử dụng theo 4 chức năng khác nhau
b. Chân này có thể sử dụng cùng lúc 4 chức năng
c. Tại mỗi thời điểm chân này chỉ có thể sử dụng một chức năng
d. Chân này có thể sử dụng làm chức năng xuất tín hiệu
Câu 24. Chọn phát biểu đúng về so sánh truyền nhận đồng bộ và bất đồng bộ của
module EUSTART của pic16f667
a. Truyền dữ liệu đồng bộ có tốc độ nhanh hơn truyền dữ liệu bất đồng bộ
b. Truyền dữ liệu đồng bộ có tố độ châm hơn bất đồng bộ
c. Truyền dữ liệu đồng bộ có tố độ bằng bất đồng bộ
d. Không thể so sánh được
Câu 25. Chọn phát biểu đúng về chế full-duplex(song công) của module Eustart của ic 16f887
a. Đường dây dành riêng cho hoạt động truyền hoặc nhận dữ liệu chứ không dùng cho cả 2
b. Đường dây có thể dùng cho hoạt động truyền hoặc nhận dữ liệu nhưng mỗi lần dùng chỉ có một
c. Hoạt động truyền và nhận có thể tiến hành đồng thời trên cùng đường dây
d. Cả 3 câu trên đều sai
Câu 26. IC MAX232 thường được sử dụng trong giao tiếp EUSTART giữa pic16f887
và máy vi tính PC nhằm mục đích
a. Tăng tốc độ truyền dữ liệu
b. Tăng tính bảo mật của dữ liệu
c. Đồng bộ điện áp giữa VDK và máy vi tính
d. Cả 3 câu trên đều sai
Câu 27. Module CCP1vaf CCP2 của pic 16f887 có thể hoạt động ở chế độ
a. Capturre mode(xác định khoảng thời gian của một sự kiện )
b. Compare mode (cho phép người dùng an thiệp một sự kiện bên ngoài sau một thời gian)
c. PWM mode( cho phép tạo ra một tín hiệu với tần số và chu kỳ nhiệm vụ có
thể hiệu chỉnh được) d. Cả 3
Câu 28. Bộ nhớ flash trong vi điều khiển 16f887 là a. Bộ nhớ chương trình b. Bộ nhớ dữ liệu c. Cả a và b đúng d. Cả a và b sai
Câu 35. Cho phát biểu sau đối với 16f887 thì ngắt timer2 có ưu tiên ngắt cao hơn ngắt timer1 a. Đúng b. Sai
c. Đúng nếu sử dụng 2 timer này đồng thời
d. Đúng nếu kích hoạt timer 2 trước timer1 sau
Câu 36. Trong CCS, hàm “ a=a<<1” có ý nghĩa dịch các bit của biến a qua trái một
đơn vị. Giả sử ban đầu a= 0xc1 , sau 5 lần dịch thì ta được kết quả: a. a=0x08 b. a=0x0F c. a=0x10 d. a= 0x20
Câu 37. Thanh ghi PORTA của VDK PIC16F887 có địa chỉ là 0Sh, giả sử các chân
của cổng A là các chân xuất tín hiệu Câu lệnh “PORTA = S3” có ý nghĩa
a. các chân RA0, RA2, RA4, RA6 có mức điện áp cao
b. các chân RA1, RA3, RA5, RA7 có mức điện áp cao
c. các chân RA1, RA2, RA3, RA4 có mức điện áp cao
d. cả 3 câu trên đều sai
Câu 38. Thanh ghi TRISA của VDK PIC16F887 quy định xem một chân của cổng A
là đọc hay xuất tín hiệu. Sau khi khai báo địa chỉ thanh ghi TRISA(8Sh), câu lệnh “TRISA=1S” có ý nghĩa
a. các chân RA0, RA1, RA2, RA3 là chân đọc tín hiệu
b. các chân RA4, RA5, 5A6, RA7 là chân xuất tín hiệu
c. cả câu a và b đều đúng
d. cả câu a và b đều sai
Câu 39. PORTA VÀ TRISA là 2 thanh ghi quản lý việc xuất nhập tín hiệu tại cổng A
của VDK PIC16F887, câu lệnh sau “#byte PORTA =0x05” có ý nghĩa
a. chân RA0 và chân RA2 của cổng A là chân đọc tín hiệu
b. gán giá trị bằng 5 cho cổng A
c. địa chỉ của thanh ghi PORTA là 05h
d. cả 3 câu trên đều sai
Câu 40. VDK PIC16F887 không có modul nào sau đây a. RS232 b. SPI c. I2C d. CAN
Câu 41. Bộ dữ liệu của VDK PIC16F887 gồm
a. Các thanh ghi chức năng đặc biệt
b. Các thanh ghi đa mục đích
c. Các thanh ghi định địa chỉ bit
d. Cả 3 câu trên đều đúng
Câu 42. Nếu một ADC có positive input reference voltage là 4.096V và là 10bit
chuyển đổi. xác định độ phân giải resolution (mV/bit) và số nhị phân kết quả nếu điện
áp đầu vào chuyển đổi là 1V a. 4 mv/bit, 0011111010 b. 4mV/bit, 0011101100 c. 8mV/bit, 0001111111 d. 8mV/bit, 0011111101
Câu 43. Tần số xung clock của 1 MCU là 8 MHz. Tính giá trị số nạp cho 16 bit
timer(preload value) để tạo ra 1 ngắt (interrupt) 10ms a. 45536 b. 25536 c. 15536 d. 35536
Câu 44. Giả sử chúng ta muốn điều khiển động cơ có thể quay được tối đa là
3000vg/ph, đĩa encoder gắn trên động cơ có 200 xung. Khi động cơ quay với tốc độ
tối đa có thể tạo ra chu kỳ xung là a. 100us b. 50us c. 200us d. 60us
Câu 45. Cho vi điều khiển sử dụng là PIC16F887, thạch anh có tần số 20MHz chọn
giá trị prescale =8. Nếu muốn timer0 định thời một khoảng thời gian là 240us thì giá
trị ban đầu cần cài đặt cho timer0 là a. TIMER0=156 b. TIMER0=106 c. TIMER0=116 d. TIMER0=56
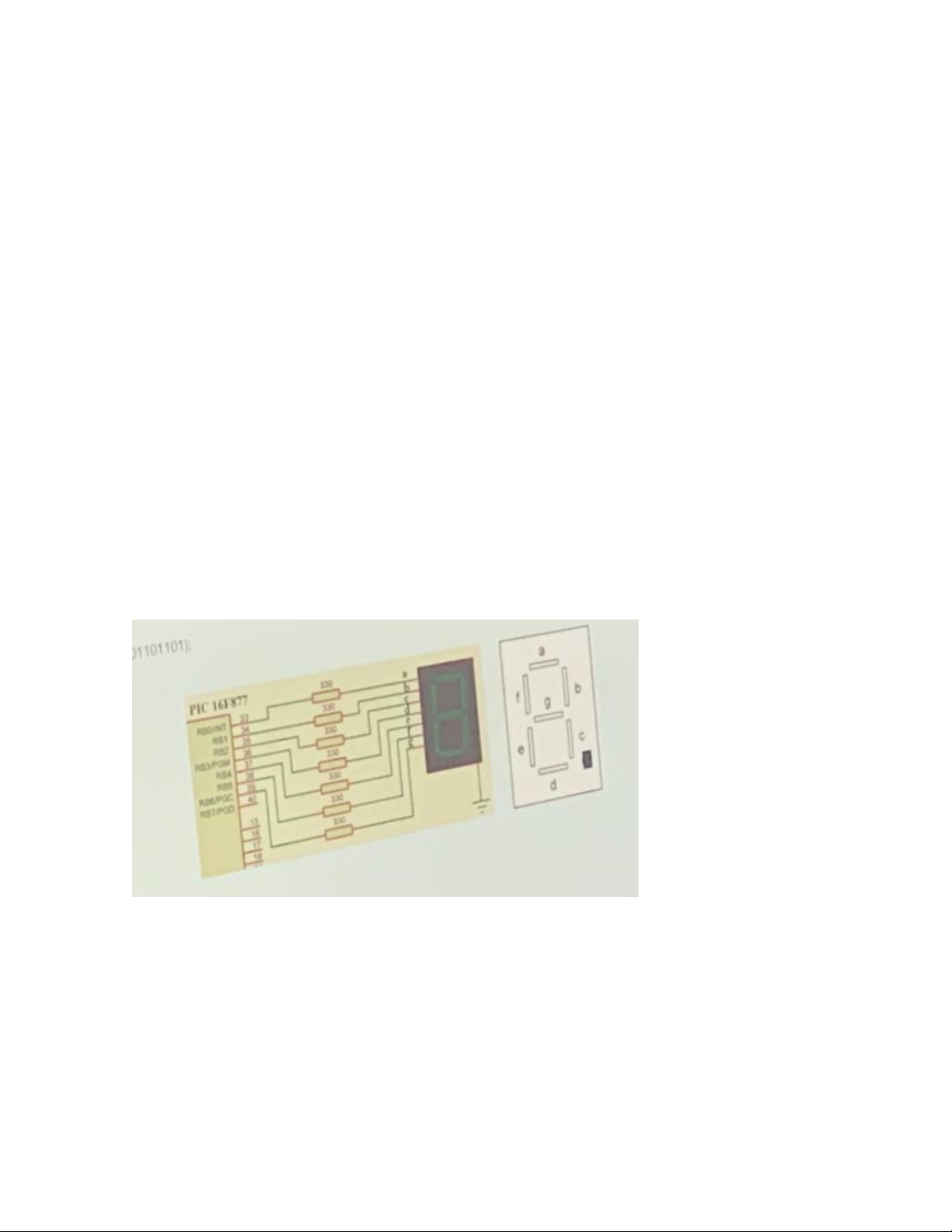
Câu 46. Cho mạch điện và code như sau, kết quả hiển thị là Void main() { Output_B(0b01101101); } a. 5 b. 2 c. 3 d. Tất cả đều sai
Câu 47. Đối với VDK PIC16F887 thì một chu kỳ máy sẽ bằng 4 lần chu kỳ dao động
của thạch anh. Nếu sử dụng thạch anh 8MHz thì chu kỳ máy là a. 250ns b. 200ns c. 500ns d. 400ns
Câu 48. Module CCP1 VÀ CCP2 của VDK PIC16F887 có thể hoạt động ở chế độ
a. Capture mode (xác định khoảng thời gian của một sự kiện)
b. Compare mode (cho phép người dùng can thiệp một sự kiện bên ngoài sau một
khoảng thời gian định trước)
c. PWM mode (cho phép tạo ra 1 tín hiệu với tần số và chu kỳ nhiệm vụ có thể hiệu chỉnh được)
d. Cả 3 câu trên đều đúng
Tại sao phải sử dụng điện trở kéo lên trong mạch. Vai trò của nó. Khi nào nên/
không nên sử dụng ( Khuyến cáo )
1. Cấu hình của vi điều khiển PIC16F887
2. Các loại bộ nhớ mà vi điều khiển PIC16F887 tích hợp
3. Tên và chức năng port A, B, C, D , E
Câu 1. PIC16F887 có bao nhiêu port a. 3 b. 4 c. 5 d. 6
Câu 2. Port nào có 4 đường: a. A b. B c. C d. E
Câu 3. PIC16F887 có tích hợp ADC bao nhiêu bit: a. 8 bit b. 9 bit c. 10 bit d. 12 bit
Câu 4. PIC16F887 có tích hợp ADC bao nhiêu kênh a. 8 b. 14 c. 10 d. 10 e. 12
Câu 5. Các tín hiệu truyền dữ liệu SPI của pic16f887 có tên là: a. SDI, SCL b. SCL, SDA c. SDI, SDO d. SDA, SDI
Câu 6. Các tín hiệu truyền dữ liệu SPI của PIC16F887 có tên là: a. SDI, SCL, SDO, SS b. SDI, SDO, SS c. SDI, SCK, SDO, SS d. SDA, SDI, SCK
Câu 7. Các tín hiệu truyền dữ liệu UART: a. TX, RX, CK b. TX, DT, CK c. TX, RX d. DT, CK
Câu 8. Các tín hiệu truyền dữ liệu SART: a. TX, RX, CK b. TX, DT, CK c. TX, RX d. DT, CK
Câu 9. Các tín hiệu nào nhân xung CK cho timer0 a. T0SCK b. TOSCL c. TOCK1 d. TOCK
Câu 10. Các tín hiệu nào thiết lập điện áp tham chiếu cho ADC: a. CVREF & VREF+ b. CVREF & VREF- c. VREF+ & VREF- d. CVREF- & VREF-
Câu 11. Port nào của PIC16F887 có điện trở kéo lên bên trong: a. A b. B c. C d. D
Câu 12. Port nào có ngõ vào ngắt ngoài INT a. A b. B c. C d. D
Câu 13. Thanh ghi TRISX có chức năng a. Định hướng cho ADC
b. Lưu dữ liệu cho các port
c. Định hướng cho các port
d. Lưu địa chỉ của các port
Câu 14. Khai báo biến “INT x” thì biến x a. 1 bit b. 8 bit c. 16 bit d. 32 bit
Câu 15. Khai báo biến “INT16 y” thì biến y là: a. 1 bit b. 8 bit c. 16 bit d. 32 bit
Câu 16. Khai báo biên “unsigned nit y” thì biến y là số nguyên dương:
a. Có giá trị từ 0 đến 255
b. Có giá trị từ 0 đến 25
c. Có giá trị từ -128 đến 127
d. Có giá trị từ -128 đến 255
Câu 17. Khai báo biên “signed nit y” thì biến y là số nguyên dương:
a. Có giá trị từ 0 đến 255
b. Có giá trị từ 0 đến 256
c. Có giá trị từ -128 đến 127
d. Có giá trị từ -128 đến 255
Câu 18. Lệnh nào định hình cấu hình cho port B a. Output_b(value) b. Output_X(value) c. Set_tris_b(value) d. Input_X(value)
Câu 19. Lệnh nào xuất giá trị 8 bit ra portB a. Output_b(value) b. Output_high(value) c. Set_tris_b(value) d. Input_b(value)
Câu 20. Lệnh nào làm 1 tín hiệu của port xuống mức thấp a. Output_low(pin) b. Output_high(pin) c. Output_toggle(pin) d. Input_pull(pin)
Câu 21. Vi điều khiển PIC thì các port: a. Chỉ truy xuất bit b. Truy xuất bit và byte c. Truy xuất byte d. Truy xuất 16 bit
Câu 22. Trong mạch quét 8 led thì trasistor có chức năng a. Khuếch đại dòng
b. Khuếch đại điện áp
c. Khuếch đại dòng, điện áp, điều khiển led
Câu 23. Trong mạch quét 8 led thì mỗi thời điểm có: a. 2 led sáng b. 1 led sán c. 3 led sáng d. 8 led sáng
Câu 24. Trong mạch quét 8 led nếu chương trình không quét thì: a. 8 led vẫn sáng b. 8 led sáng mờ c. 8 led tắt d. 1 led sáng
Câu 25. Nếu mở rộng mạch quét 8 led thành 16 led thì dùng tổng cộng: a. 16 I/O b. 32 I/O c. 8 I/O d. 24 I/O
Câu 26. Trong mạch quét 8 led thì thời gian led sáng mỗi led là: a. 1/8 CK b. 7/8 CK c. 1/4CK d. 8/7CK
Câu 27. Trong mạch quét 8 led thì thời gian led tắt mỗi led là: a. 1/8 CK b. 7/8 CK c. 1/4CK d. 8/7CK
Câu 28. Mã 7 đoạn số 9 của led anode chung thì: a. 0xF9 b. 0x90 c. 0x80 d. 0xF0
Câu 29. Mã 7 đoạn số hex F của led anode chung là: a. 0x8E b. 0xE8 c. 0xF8 d. 0xFE Câu 30. VDK có mấy timer a. 3 b. 4 c. 5 d. 6
Câu 31. VDK có mấy Counter a. 3 b. 4 c. 2 d. 5 Câu 32. Timer0 là: a. 10 bit b. 12 bit c. 16 bit d. 8 bit Câu 33. Timer1 là: a. 10 bit b. 12 bit c. 16 bit d. 8 bit
Câu 34. Timer nào có bộ chia trước và chia sau: a. T0, T1, T2 b. T2 c. T0, T1 d. T0, T2
Câu 35. Timer nào có bộ chia trước a. T0, T1, T2 b. T2 c. T0, T1 d. T0, T2
Câu 36. Timer0 phát sinh yêu cầu ngắt khi:
a. Giá trị đếm từ FFH sang 00H
b. Giá trị đếm từ FFFH sang 0000H
c. Giá trị đếm từ 00H sang FFH
d. Giá trị timer bằng với giá trị PR2
Câu 37. Timer1 phát sinh yêu cầu ngắt khi:
a. Giá trị đếm từ FFH sang 00H
b. Giá trị đếm từ FFFH sang 0000H
c. Giá trị đếm từ 00H sang FFH
d. Giá trị timer bằng với giá trị PR2
Câu 38. Timer2 phát sinh yêu cầu ngắt khi:
a. Giá trị đếm từ FFH sang 00H
b. Giá trị đếm từ FFFH sang 0000H
c. Giá trị đếm từ 00H sang FFH
d. Giá trị timer bằng với giá trị PR2
Câu 39. Timer nào cho phép đếm xung ngoại a. T0, T1, T2 b. T2 c. T0, T1 d. T0, T2
Câu 40. Timer nào có chế độ hoạt động On/off a. T0, T1, T2 b. T2, T1 c. T0, T1 d. T1
Câu 41. Timer0 thì bit bào gán bộ chia trước cho timer0 hay watchdog timer a. PSA b. PS<2:0> c. T0SE d. T0SE
Câu 42. Timer0 thì bit nào lựa chọn xung nội hay xung ngoại a. PSA b. PS<2:0> c. T0SE d. T0SE 2.1
Bộ nhớ của chương trình pic16f887 có dung lượng là : a. 8KxByte b. 8Kx14Byte c. 8Kx16Byte d. 8Kx368Byte 2.2
bộ nhớ dữ liệu của pic16f887 có dung lượng là a.256Byte b. 8Kx16bit c. 8Kx14bit d. 368Byte 2.3
Bộ nhớ dữ liệu EEPROM của 16f887 có dung lượng là a.8KxWord b.8Kx14bit c.256Byte d. 368Byte
2.4 Bộ nhớ ngăn xếp của PIC 16f887 có dung llượng là a. 8Byte b. 8x14bit c. 256Byte d. 8x13bit
2.5 Bộ nhớ chương trình 16f887 chia làm a. 2 trang b. 4 trang c. 2 bank d. 4 bank 2.6
bộ nhớ dữ liệu 16f887 chia làm a. 2 trang b. 4 trang c. 2 bank d. 4 bank 2.7
Mỗi trang bộ nhớ chương trình của pic 16f887 có dung lượng là a. 256byte b. 1024 word c. 2048 word d. 368 byte
2.8 Mỗi bank bộ nhớ dữ liệu của 16f887 có dung lượng là a.256 byte b.128 byte c.2048 byte d.368 byte 2.9
Địa chỉ ô nhớ 1234H thuộc trang bộ nhớ nào a. Trang thứ 0 b. Trang thứ 1 c. Trang thứ 2 d. Trang thứ 3
2.10 Thanh ghi PC của 16f887 có chiều dài là a.12 bit b.13bit c.14bit d.15bit
2.11 Phân chia bộ nhớ theo trang có ưu điểm
a. Làm vi điều khiển chạy nhanh
b. Làm tăng số lượng mã code
c. Làm giảm địa chỉ bộ nhớ
d. Làm giảm số lượng mã code
2.12 Các chương trình con lồng vào nhau của Pic phụ thuộc và dung lượng a. Bộ nhớ chương trình b. Bộ nhớ dữ liệu c. Bộ nhớ ngăn xếp d. Bộ nhớ EEPROM
2.13 Truy xuất trực tiếp bộ nhớ dữ liệu của 16f887 thì
a. Cho phép tùy ý cả 4 bank b. Cho phép 2 bank c. cho phép 1 bank d. Cho phép 3 bank
2.14 Truy xuất gián tiếp bộ dữ liệu của Pic 16f887 thì
a. Cho phép tùy ý cả 4 bank b. Cho phép 2 bank c. cho phép 1 bank d. Cho phép 3 bank
2.15 Bit cho phép thay đổi các bank trong truy xuất trực tiếp bộ nhớ dữ liệu của PIC 16f887 là a. IRP1,IRP2 b.RP1, RP0 c.RP1,RP2 d.RP,IRP