Đo tốc độ động cơ dụng sử dụng Encoder - Thuyết minh đồ án các hệ thống đo cơ điện tử
Đo tốc độ động cơ dụng sử dụng Encoder. Tổng quan các phương pháp đo tốc độ động cơ. Xây dựng hệ thống mô hình. Trình điều khiển thiết kế và cài đặt. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời đọc đón xem!
Nội dung thuyết minh 1. Tổng quan các phương pháp đo tốc độ động cơ. 2. Xây dựng hệ thống mô hình 3. Trình điều khiển thiết kế và cài đặt Nội dung thuyết minh 1. Tổng quan các phương pháp đo tốc độ động cơ. 2. Xây dựng hệ thống mô hình 3. Trình điều khiển thiết kế và cài đặt
Môn: Cơ điện tử 12 tài liệu
Trường: Đại học Thái Nguyên 389 tài liệu
Tác giả:









Preview text:
lOMoAR cPSD| 45349271
TRƯỜNG ĐẠI HỌC KỸ THUẬT CÔNG NGHIỆP KHOA CƠ KHÍ
BỘ MÔN CƠ ĐIỆN TỬ
THUYẾT MINH ĐỒ ÁN CÁC HỆ
THỐNG ĐO CƠ ĐIỆN TỬ
ĐỀ TÀI: ĐO TỐC ĐỘ ĐỘNG CƠ SỬ DỤNG ENCODER
Giáo viên hướng dẫn: TS. Dương Quốc Khánh
Sinh viên thực hiện: Nguyễn Thanh Tân
Mã số sinh viên: K205520114125 Lớp: K56CĐT.02 Thái Nguyên 2024 lOMoAR cPSD| 45349271
TRƯỜNG ĐẠI HỌC KỸ THUẬT CÔNG NGHIỆP
KHOA CƠ KHÍ BỘ MÔN CƠ ĐIỆN TỬ ĐỒ ÁN MÔN HỌC
CÁC HỆ THỐNG ĐO CƠ ĐIỆN TỬ
Sinh viên: Nguyễn Thanh Tân Mã số sinh viên: K205520114125 Lớp: K56CDT.02
Ngành: Cơ điện tử Chuyên ngành: Kỹ thuật Cơ điện tử
Ngày giao đề………………….. Ngày hoàn thành …………………………..
1. Tên đề tài: Đo tốc độ động cơ sử dụng encoder 2. Nội dung thuyết minh
1. Tổng quan các phương pháp đo tốc độ động cơ.
2. Xây dựng mô hình hệ thống
3. Thiết kế và lập trình điều khiển
3. Kết quả cần đạt đượcThuyết minh: 1 bản Sản phẩm: 1 bản TRƯỞNG BỘ MÔN GIÁO VIÊN HƯỚNG DẪN
(Ký và ghi rõ họ tên)
(Ký và ghi rõ họ tên)
NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN
.............................................................................................................................................. .
.............................................................................................................................................. .
.............................................................................................................................................. .
.............................................................................................................................................. . lOMoAR cPSD| 45349271
.............................................................................................................................................. .
.............................................................................................................................................. .
Thái Nguyên, ngày....tháng.....năm 20.... GIÁO VIÊN HƯỚNG DẪN (Ký ghi rõ họ tên)
ĐÁNH GIÁ CỦA GIÁO VIÊN CHẤM
.............................................................................................................................................. .
.............................................................................................................................................. .
.............................................................................................................................................. .
.............................................................................................................................................. .
.............................................................................................................................................. .
Thái Nguyên, ngày....tháng.....năm 20.... GIÁO VIÊN CHẤM 1 GIÁO VIÊN CHẤM 2 (Ký ghi rõ (Ký ghi rõ họ tên) họ tên) lOMoAR cPSD| 45349271 LỜI NÓI ĐẦU
Trong sự nghiệp công nghiệp hóa, hiện đại hóa đất nước vấn đề tự động hóa có vai
trò đặc biệt quan trọng. Nhằm nâng cao năng suất dây chuyền công nghệ, nâng cao chất
lượng, khả năng cạnh tranh sản phẩm, cải thiện điều kiện lao động, nâng cao năng suất lao
động… Việc giám sát tốc độ động cơ là rất cần thiết. Việc đo tốc độ bằng encoder đóng vai
trò quyết định trong việc đảm bảo chính xác và hiệu suất của các hệ thống chuyển động.
Encoder là công cụ đo lường linh hoạt và đáng tin cậy mang lại sự chính xác và đồng nhất
trong quá trình theo dõi vận tốc. Việc đo tốc độ bằng encoder không chỉ là một phần quan
trọng của công nghiệp và tự động hóa mà còn đóng vai trò quyết định trong việc đảm bảo
chính xác và hiệu suất của các hệ thống chuyển động. Encoder, như một công cụ đo lường
linh hoạt và đáng tin cậy mang lại sự chính xác và đồng nhất trong quá trình theo dõi vận
tốc của các đối tượng chuyển động.
ĐỒ ÁN THIẾT KẾ HỆ THỐNG ĐO TỐC ĐỘ ĐỘNG CƠ SỬ DỤNG ENCODER
giúp em làm quen và tìm hiểu kĩ hơn với những vấn đề cốt lõi cơ bản nhất về hệ thống đo
và rất có ích cho em sau này. Qua đó em có thể tìm hiểu sâu hơn và tìm hiểu được các tiếp
cận và giải quyết các vấn đề của môn học chuyên nghành. Đồng thời qua việc làm đồ án
cũng hình thành thêm các kĩ năng làm việc, lập kế hoạch, viết báo cáo…Rất có ích sau này.
Trong quá trình thiết kế đồ án dưới sự hướng dẫn nhiệt tình của Thầy giáo Dương
Quốc Khánh cùng với sự tìm hiểu của bản thân, đến nay nhiệm vụ của em đã hoàn thành.
Khi thiết kế, tính toán làm đồ án có rất nhiều vấn đề đặt ra mà trong phạm vi khả năng của
em còn hạn chế chưa giải quyết triệt để được, em rất mong được sự nhận xét chỉ dẫn và
sửa đổi của các thầy cô trong bộ môn để đồ án của em được hoàn thiện hơn.
Em xin trân thành cảm ơn! lOMoAR cPSD| 45349271 CHƯƠNG 1
TỔNG QUAN VỀ PHƯƠNG PHÁP ĐO TỐC ĐỘ ĐỘNG CƠ
1.1 Tổng quan về hệ thống đo
Hệ thống đo cơ điện tử, là một phần không thể thiếu trong cả lĩnh vực nghiên cứu và
ứng dụng công nghiệp, đóng vai trò quan trọng trong việc theo dõi và đo lường các thông
số liên quan đến cơ bản của môi trường và cơ thể. Tích hợp cảm biến cơ và thiết bị điện
tử, hệ thống này chuyển đổi các tín hiệu về chuyển động, áp suất, nhiệt độ và các thông số
khác thành dữ liệu số có thể phân tích.
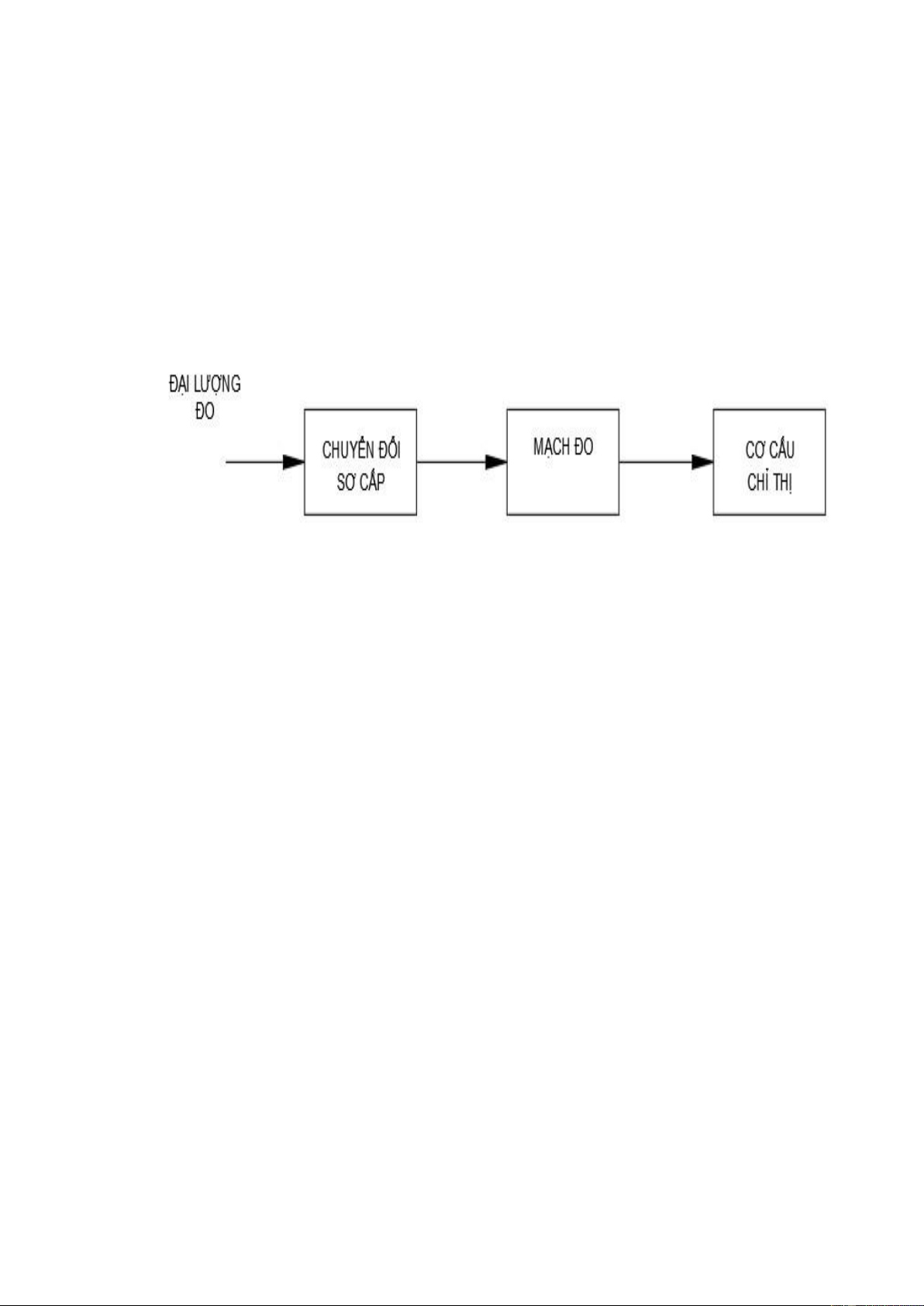
Hình 1.1 Cấu trúc của một hệ thống đo cơ điện tử
Chức năng của các thành phần trong hệ thống:
Bộ chuyển đổi sơ cấp: Bộ chuyển đổi sơ cấp trong hệ thống đo có chức năng chuyển
đổi tín hiệu đo từ dạng đo sơ cấp (thường là dạng analog) thành dạng tín hiệu số. Điều này
giúp tiện lợi trong việc xử lý, truyền tải và lưu trữ dữ liệu đo, đồng thời cung cấp khả năng
xử lý và hiệu suất tốt hơn cho các thiết bị điện tử kỹ thuật số.
Mạch đo: Mạch đo trong hệ thống đo có nhiệm vụ chuyển đổi tín hiệu từ đối tượng
đo thành dạng có thể xử lý, thường là tín hiệu số. Chức năng chính của mạch đo bao gồm
việc tăng độ lớn của tín hiệu, lọc nhiễu và tạp âm không mong muốn, hiệu chuẩn để đảm
bảo độ chính xác, chuyển đổi từ dạng analog sang digital (ADC), và có thể ghi dữ liệu để
lưu trữ thông tin đo lường. Mục đích là đảm bảo rằng thông tin đo lường được thu thập
một cách chính xác và tin cậy.
Cơ cấu chỉ thị: Cơ cấu chỉ thị trong một hệ thống đóng vai trò quan trọng trong việc
hiển thị thông tin và trạng thái. Chức năng chính của nó bao gồm việc hiển thị dữ liệu đo
lường hoặc trạng thái của hệ thống, cung cấp thông báo và cảnh báo khi cần thiết. Đồng
thời, nó giúp người sử dụng theo dõi trạng thái của hệ thống và thực hiện điều chỉnh. Cơ
cấu chỉ thị cũng đóng vai trò trong việc đồng bộ hóa và điều khiển thành phần của hệ thống,
tạo ra một giao diện trực quan và hiệu quả giữa hệ thống và người sử dụng.
1.2 Tổng quan về mạch đo tốc độ động cơ
1.2.1 Mạch đo tốc độ động cơ là gì? lOMoAR cPSD| 45349271
Mạch đo tốc độ động cơ là một thiết bị đo và hiển thị tốc độ quay của động cơ. Thường
sử dụng cảm biến như encoder để đo số vòng quay hoặc tốc độ của trục động cơ và sau đó
truyền thông tin này đến một mạch điển tử để xử lý và hiển thị kết quả.
Mạch đo tốc độ động cơ thường được sử dụng trong các ứng dụng công nghiệp, ô tô,
động cơ máy móc, và các hệ thống tự động hóa. Nó giúp đo lường và kiểm soát tốc độ
quay của động cơ, đảm bảo hiệu suất ổn định và an toàn trong nhiều cách sử khác nhau.
1.2.2 Giới thiệu các phương pháp đo tốc độ động cơ
Có 3 phương pháp đo tốc độ của động cơ. Tùy vào từng mục đích sử dụng mà có thể
đo được tốc độ vòng quay động cơ chính xác nhất. a. Phương pháp đo không tiếp xúc
Đây là phương pháp cũ nhất trong các phương pháp đo rpm. Tốc độ vòng quay của
vật cần đo sẽ được cảm biến chuyển đổi thành tín hiệu điện, tín hiệu này sẽ được thiết bị
phân tích và hiển thị. Phương pháp đo này vẫn được sử dụng thường xuyên nhưng chủ yếu
dùng cho những vật có tốc độ quay thấp từ 20 rpm đến 20.000 rpm. Sự bất lợi của phương
pháp này là tốc độ quay của tải phụ thuộc rất nhiều vào lực tiếp xúc. Ngoài ra, phương
pháp đo này không thể đo cho những vật có kích thước nhỏ. Nếu như tốc độ vòng quay
quá lớn cảm biến sẽ bị trượt ra ngoài. b. Phương pháp đo không tiếp xúc
Tốc độ vòng quay sẽ được đo bằng cách đo thời gian của chum tia phản xạ tại vật cần
đo. Thiết bị sẽ phát ra một chùm tia hồng ngoại, chum tia ánh sang này sẽ bị phản xạ lại tại
vật cần đo bởi tấm phản quang được dán lên vật cần đo. Khoảng cách lớn nhất giữa tấm
phản quang và thiết bị đo không vượt quá 350 mm. Phương pháp đo này sẽ cao cấp hơn
phương pháp đo tiếp xúc. Tuy nhiên, không phải lúc nào cũng có thể dán được tấm phản
quang lên trên vật cần đo. Dải đo 20 rpm đến 100.000 rpm. c. Phương pháp đo sử dụng tần số chớp
Dựa vào nguyên lý của tần số chớp, các vật thể sẽ đứng yên trong mắt người quan sát
khi tần số chớp tốc độ cao đồng bộ với sự di chuyển của vật. Phương pháp đo này có những
đặc tính nổi bật hơn các phương pháp đo khác đó là có thể đo được cho những vật rất nhỏ
hoặc đo được ở những nơi ta không chạm đến được. Không cần thiết phải dán tấm phản
quang lên vật cần đo. Ví dụ như không cần thiết phải dừng lại quy trình sản xuất. Dải đo
30 rpm đến 20.000 rpm. Ngoài ra, phương pháp đo này không chỉ đo được rpm mà nó còn
có thể đo rung và theo dõi chuyển động, ví dụ như: các màng rung, màng loa…
Kết luận: Theo đề tài được giao em sẽ tập chung vào phương pháp đo không tiếp xúc: Sử
dụng encoder gắn trên động cơ để đo tốc độ của động cơ.
1.3 Giới thiệu về đề tài
Trong đề tài sẽ sử dụng động cơ gắn encoder để đo tốc độ vòng quay của động cơ, sử
dụng bo mạch Arduino để điều khiển động cơ. Trong các hoạt động sản xuất độ an toàn lOMoAR cPSD| 45349271
cũng như chế độ làm việc của máy phụ thuộc rất lớn vào tốc độ quay. Đo tốc độ động cơ
để đánh giá chính xác tốc độ quay hiện hành của động cơ, phục vụ thiết thực cho công việc
sửa chữa, bảo dưỡng và tái kiểm tra độ chuẩn xác của động cơ. 1.3.1 Ưu, nhược điểm của
mạch đo tốc độ động cơ sử dụng encoder a. Ưu điểm:
- Đầu ra dạng xung nên trong các hệ thống điều khiển số không cần bộ chuyển đổi ADC.
- Dễ dàng lắp đặt và sử dụng.
- Dễ đọc tín hiệu của trục động cơ. b. Nhược điểm:
- Có thể cần mạch giải mã mạch đếm
- Không lưu được giá trị khi mất điện
- Làm việc trong môi trường xấu độ thì chính xác giảm
1.3.2 Phương pháp nghiên cứu
- Tìm hiểu cấu tạo và nguyên lý hoạt động: Arduino, cảm biến encoder, động cơ DC.
- Mô phỏng mạch và viết code bằng phần mềm.
- Thiết kế mạch hệ thống đo hoàn chỉnh.
1.3.3 Nguyên lý chung
Dùng cảm biến encoder đo tín hiệu xung, đưa tín hiệu xung về vi điều khiển. Vi điều
khiển nhận tín hiệu xung và xử lý tín tín hiệu đưa ra màn hình LCD để hiển thị kết quả là tốc độ động cơ.
1.3.4 Các thành phần của mạch đo tốc độ động cơ sử dụng encoder
Encoder: Thu thập thông tin về vòng quay hoặc vận tốc của trục động cơ.
Mạch xử lý: Xử lý tín hiệu từ encoder để chuyển đổi thành dữ liệu tốc độ động cơ.
Giao diện hiển thị: Hiển thị kết quả đo tốc độ động cơ qua màn hình hiển thị LCD.
Mạch điều khiển: Điều khiển động cơ dựa trên thông tin về tốc độ.
Nguồn điện: Cung cấp năng lượng cho toàn mạch đo tốc độ.
Các thành phần kết nối: Bao gồm dây cáp và các linh kiện kết nối khác.
1.3.5 Phân tích yêu cầu của mạch đo tốc độ động cơ sử dụng encoder
Để hệ thống đo tốc độ động cơ hoạt động ổn định, cần đáp ứng những yêu cầu để
đảm bảo hệ thống vận hành ổn định, chính xác và an toàn: lOMoAR cPSD| 45349271
Độ chính xác của encoder: Cảm biến encoder cần có tốc độ chính xác cao để đảm bảo
đo lường chính xác về tốc độ
Ổn định nguồn cấp điện: Mạch điện cần có nguồn cấp ổn định để đảm bảo hoạt động
đúng cách các thành phần.
Mạch xử lý tín hiệu chất lượng cao: Mạch xử lý tín hiệu cần được thiết kế để xử lý
thông tin từ encoder một cách chính xác và hiệu quả.
Giao diện hiển thị rõ ràng: Giao diện hiển thị cần cung cấp thông tin tốc độ động cơ
mooth cách dễ đọc và dễ hiểu.
Độ bền và ổn định cơ học: Các linh kiện vật lý như encoder và bộ truyền động cần
đảm bảo độ bề và ổn định trong môi trường làm việc.
Kết nối đáng tin cây: Các dây kết nối và dây cáp cần phải đáng tin cậy để tránh sự cố
đứt đoạn hoặc nhiễu tín hiệu.
Bảo mật và an toàn: Đặc biệt quan trọng trong các ứng dụng yêu cầu an toàn, đảm
bảo rằng hệ thống không gây nguy hiểm khi đo tốc độ động cơ.
Bằng cách tập trung vào những yêu cầu trên, hệ thống đo tốc độ động cơ có thể được
thiết kế để hoạt động một cách hiệu quả và đáp ứng đầy đủ các yêu cầu của đề tài.
1.3.4 Thông số kĩ thuật cần đạt được trong mạch đo tốc độ động cơ sử dụng encoder
Độ chính xác: Xác định mức độ chính xác cần thiết cho ứng dụng, thường được đo
trong phần trăm của giá trị đo.
Độ phân giải: Kích thước nhỏ nhất của bước đo được, thường đo bằng đơn vị vòng quay hoặc tốc độ.
Dải đo: Phạm vi giá trị tốc độ mà hệ thống có thể đo lường, được xác định bởi giới
hạn trên và giới hạn dưới.
Độ ổn định: Khả năng duy trì độ chính xác và ổn định qua thời gian, ảnh hưởng bởi
yếu tố như dao động, nhiệt độ và độ rung.
Thời gian phản hồi: Thời gian mà hệ thống mất để phản ứng và điều chỉnh theo thay
đổi tốc độ động cơ.
Độ bền và tuổi thọ: Tuổi thọ dự kiến của hệ thống và các thành phần chính như
encoder, đảm bảo sự ổn định và độ tin cậy.
Môi trường làm việc: Điều kiện môi trường như nhiệt độ, độ ẩm, và các yếu tố khác
mà hệ thống cần làm việc.
Khả năng chống nhiễu điện từ: để đảm bảo hiệu suất ổn định trong môi trường có nhiễu. lOMoAR cPSD| 45349271
1.6 Những yếu tố quan trọng khi chọn cảm biến encoder để đo tốc độ động cơ
Độ chính xác: Cần chọn encoder có độ chính xác phù hợp với yêu cầu đo lường của
ứng dụng. Độ chính xác thường được xác định dưới dạng phần tram sai số.
Độ phân giải: Độ phân giải của encoder quyết định khả năng đo lường chi tiết và nhỏ
nhất của các biến đổi trong vòng quay. Điều này quan trọng đối với việc đo tốc độ động cơ chính xác.
Dải đo: Phạm vi giá trị tốc độ mà encoder có thể đo được. Đối với ứng dụng cần đo
tốc độ ở mức cao hoặc mức thấp, cần encoder có dải đo rộng.
Loại encoder: Có hai loại chính là encoder tuyệt đối và encoder tương đối. Encoder
tuyệt đối cung cấp thông tin vị trí chính xác tại mọi thời điểm, trong khi encoder tương đối
tính tốc độ dựa trên số xung đếm trong khoảng thời gian.
Tốc độ quay tối đa: Đảm bảo encoder có khả năng đo tốc độ động cơ ở mức tối đa
của nó mà không mất thông tin.
Khả năng chịu nhiễu và môi trường: Chọn encoder có khả năng chịu nhiễu tốt, đặc
biệt là trong môi trường làm việc có nhiễu điện từ hoặc môi trường khắc nghiệt.
Giao tiếp: Chọn encoder có giao tiếp tương thích với hệ thống điều khiển.
Chi phí: Xem xét giữa chi phí của encoder và yêu cầu kỹ thuật để đảm bảo sự cân
bằng giữa hiệu suất và chi phí.
1.7 Lựa chọn bộ điều khiển
Ngày nay có rất nhiều bộ điều khiển có thể sử dụng trong điều khiển các hệ thống,
với những cảm biến có phần không quá phức tạp thì việc đọc dữ liệu thì hầu hết các bộ
điều khiển đều có thể làm việc một cách dễ dàng.
Trên thị trường hiện nay có nhiều bộ điều khiển khác nhau có thể được sử dụng cho
hệ thống đo khối lượng, bao gồm cả PIC, Raspberry Pi, và STM32. Mỗi bộ điều khiển này
đều có những đặc điểm và ưu điểm riêng.
Tuy nhiên, khi xem xét tổng thể, Arduino nổi bật với sự dễ sử dụng, giá trị chi phí tốt,
và cộng đồng hỗ trợ mạnh mẽ. Điều này làm cho Arduino trở thành lựa chọn ưu việt cho
nhiều người khi tìm kiếm một bộ điều khiển linh hoạt, đáng tin cậy và dễ tích hợp trong
các ứng dụng đo khối lượng. Sự linh hoạt của Arduino trong việc kết hợp với các cảm biến
và module khác cùng với sự đơn giản trong quá trình lập trình là những yếu tố quan trọng
khi đưa ra quyết định lựa chọn bộ điều khiển cho hệ thống.
1.5 Ứng dụng thực tiễn của encoder
Trên máy CNC encoder được trang bị để đo và tìm được chính xác vị trí của các trục
máy cũng như vị trí dao cắt. Nhờ đó quá trình gia công được thực hiện chính xác. Kết quả
encoder đo được sẽ gửi về bộ phận kiểm tra tích cực trên máy để điều chỉnh lại vị trí chi
tiết hay vị trí của dao cắt nhằm sửa chữa lỗi và hạn chế được phế phẩm. lOMoAR cPSD| 45349271
Encoder còn được trang bị trên động cơ của thang máy để biết được vị trí chính xác
của thang máy. Đảm bảo thang máy sẽ dừng ở đúng cửa ra vào.
Trên các robot công nghiệp encoder không thể thiếu. Nó dùng để quản lí các cử động
của các khớp nối, cử động của cánh tay robot để đảm bảo chính xác vị trí.
Trong các cuộc thi robocon. Tín hiệu gửi về của encoder biết được vị trí của robocon
trên sân đấu. Ở các khúc cua thì vận tốc của hai bánh xe phải và bánh xe trái sẽ không
giống nhau. Nhờ có encoder mà có thể tính toán và lập trình được số vòng quay của hai bánh xe ở các khúc cua.
1.6 Kết luận
Hệ thống đo là phần không thể thiếu trong một sản phẩm cơ điện tử. Được kết hợp từ
nhiều kiến thức để tạo ra các hệ thống đo ứng dụng trong rất nhiều các sản phẩm. Tổng
quan chương 1 ta nắm được các nguyên lý cơ bản được sử dụng trong hệ thống đo phân
tích được những yêu cầu bài toán đặt ra . Tư duy được phương pháp giải bài toán đưa ra
được những thông số kỹ thuật cần đạt được để hệ thống hoạt động ổn định. lOMoAR cPSD| 45349271
CHƯƠNG 2: XÂY DỰNG MÔ HÌNH HỆ THỐNG
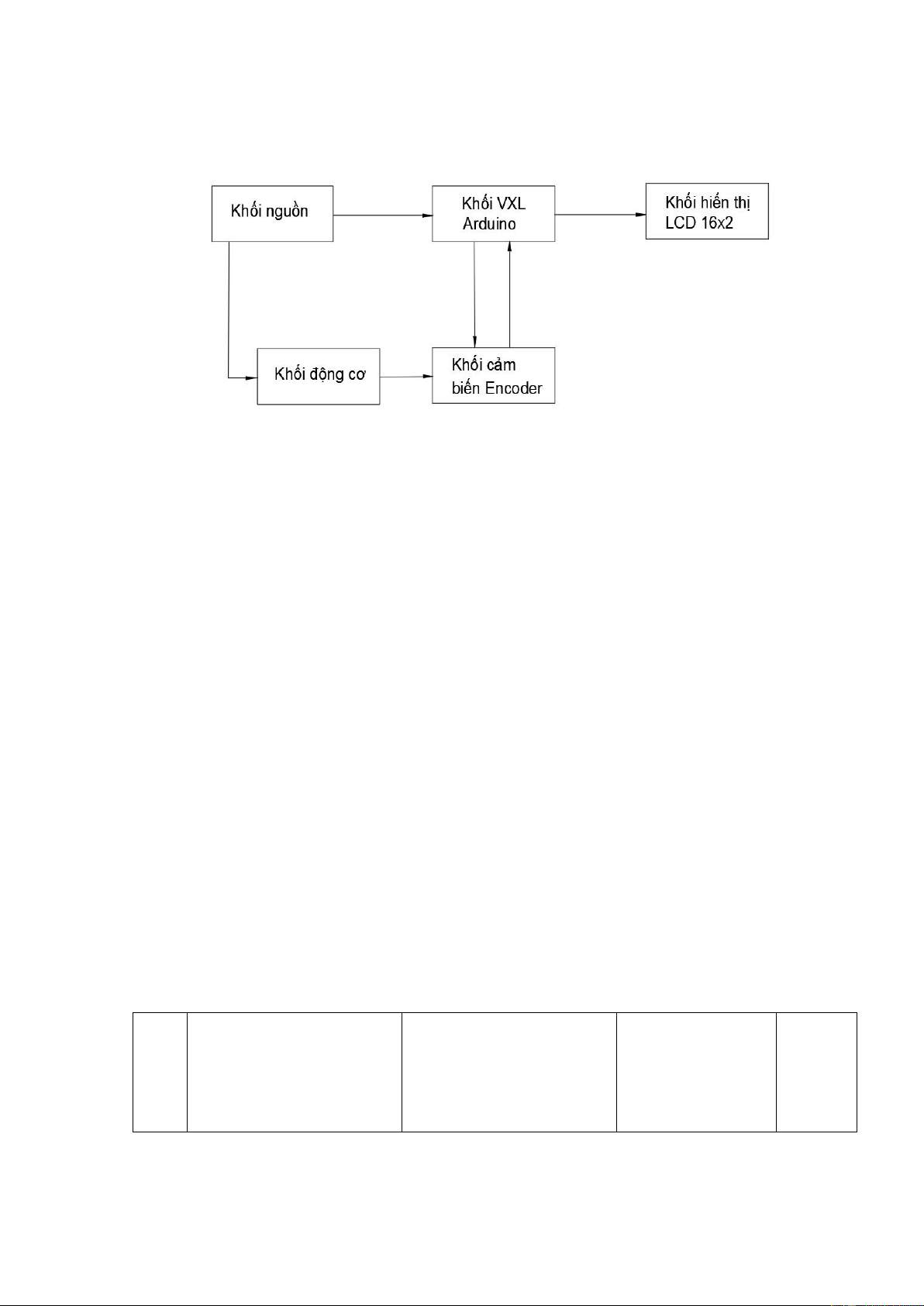
2.1 Sơ đồ khối
Hình 2.1 Sơ đồ khối
* Giải thích sơ đồ: Khối nguồn cung cấp điện vào khối vi xử lý và khối động cơ. Khi đó
động cơ sẽ quay, encoder đo tốc độ quay và chuyển thành dạng tín hiệu xung đưa về
khối vi xử lý. Khối vi xử lý nhận nhiệm vụ xử lý tín hiệu đưa ra khối hiển thị.
* Chức năng vai trò của các khối:
Khối nguồn: có vai trò cung cấp nguồn hoạt động cho toàn bộ hệ thống, nguồn được
sử dụng trong hệ thống là nguồn 5V được lấy thông qua cổng USB.
Khối cảm biến encoder: cảm nhận các tín hiệu từ khối lượng đo được và chuyển nó
thành tín hiệu điện, độ chính xác có tốt hay không phần lớn là từ cảm biến, cảm biến cần
đặt ổn định để có thể hoạt động một cách hiệu quả nhất.
Khối vi xử lí: Xử lý tín hiệu từ encoder chuyển đổi thành dữ liệu tốc độ động cơ.
Khối động cơ: Quay để tạo ra tốc độ.
Khối hiển thị: nhiệm vụ chuyển đổi tín hiệu đo được thành dạng thông tin có thể đọc
được và hiển thị cho người sử dụng. Đối với các thiết bị đo điện, nó có thể là một màn hình LCD.
2.2 Các linh kiện sử dụng trong mạch
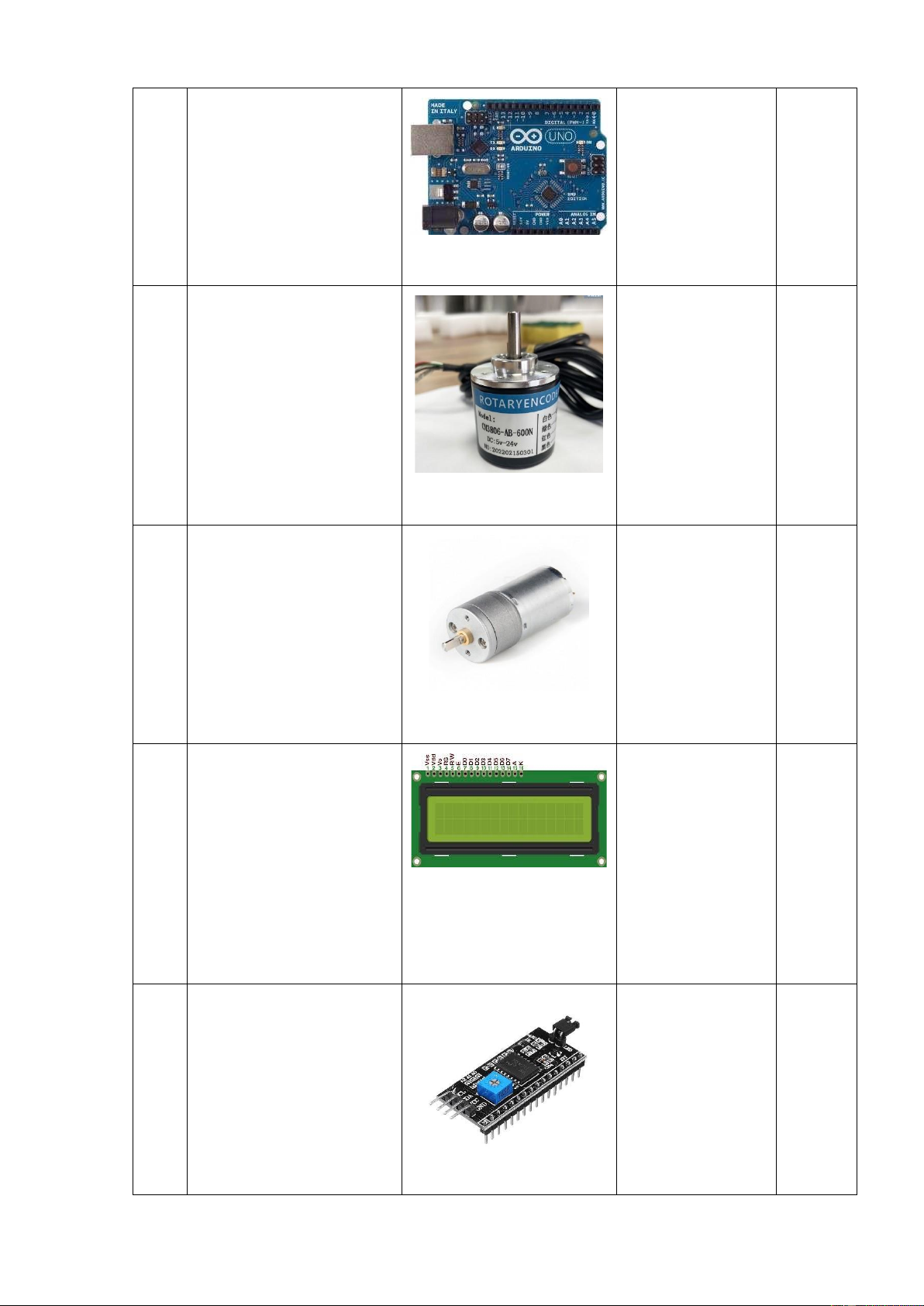
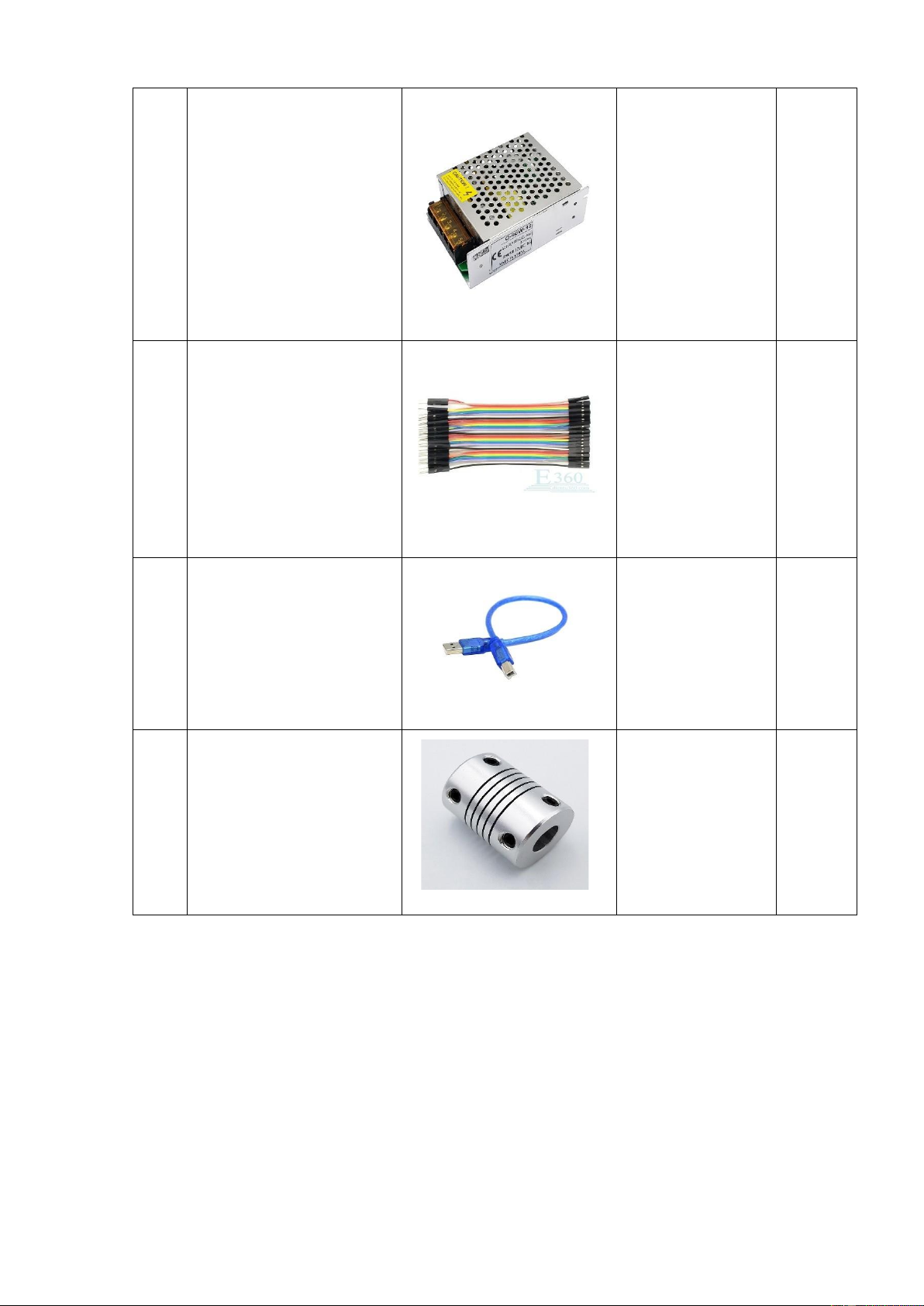
Bảng 1: Các linh kiện sử dụng trong mạch Số STT Tên linh kiện Linh kiện Thông số lượng lOMoAR cPSD| 45349271 1 Arduino Uno 1 Encoder 400 xung 2 2 5 – 24V pha AB/ 5 – 24V 1 JGA25 – 370 3
Động cơ DC giảm tốc 1 DC12V60RPM 4 LCD 16x2 LCD 16x2 xanh 1 lá 5 I2C 1 lOMoAR cPSD| 45349271 6 Nguồn tổ ong 12v – 5A 1 7 Dây cắm 10 8 Cáp nạp Micro USB 1 9 Khớp nối mềm 1 2.3 Arduino Uno
Arduino là một nền tảng mã nguồn mở phần cứng và phần mềm. Phần cứng Arduino
(các board mạch vi xử lý) được sinh ra tại Ý, nhằm xây dựng các ứng dụng tương tác với
nhau hoặc với môi trường được thuận lợi hơn. Phần cứng bao gồm một board mạch nguồn
mở được thiết kế trên nền tảng vi xử lý AVR Atmel 8bit hoặc ARM Atmel 32bit. Những
model hiện tại đã được trang bị gồm một giao tiếp USB, 6 chân đầu vào analog, 14 chân
I/O kỹ thuật số tương thích với nhiều board mở rộng khác nhau.
Arduino UNO R3 được sử dụng rộng rãi trong lĩnh vực học lập trình, điều khiển thiết
bị và thử nghiệm dự án điện tử, Arduino UNO R3 là lựa chọn ưa chuộng với tính đơn giản,
khả năng mở rộng và sự hỗ trợ đồng đội lớn từ cộng đồng Arduino. lOMoAR cPSD| 45349271
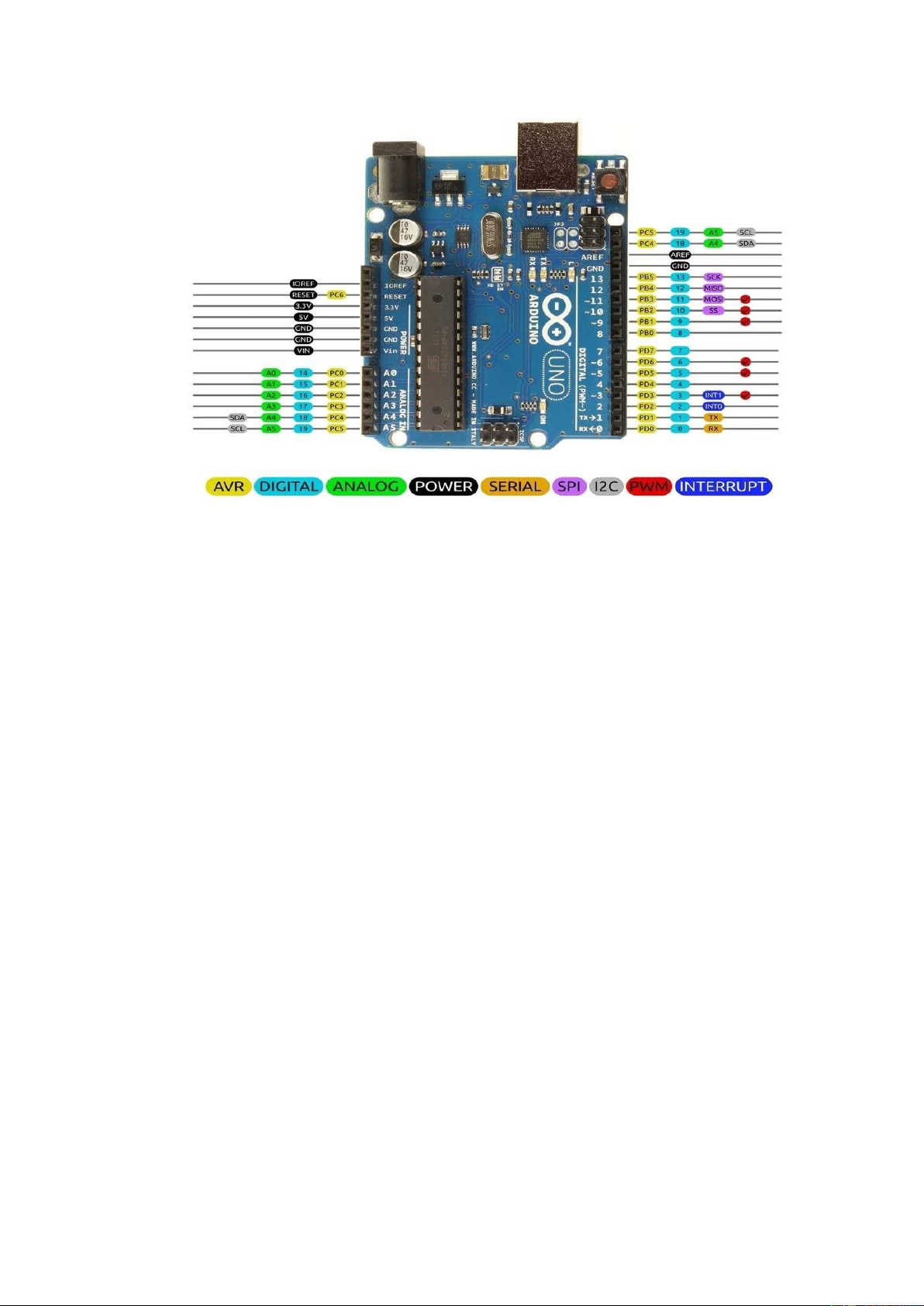
Cấu trúc tổng quát của Arduino uno:
Hình 2.2 Cấu trúc tổng quát Thông số kỹ thuật:
- Vi điều khiển: ATmega328 họ 8bit
- Điện áp hoạt động: 5V DC (chỉ được cấp qua cổng USB)
- Tần số hoạt động: 16MHz
- Dòng tiêu thụ: khoảng 30mA
- Điện áp vào khuyên dùng: 7-12V DC
- Điện áp vào giới hạn: 6-20V DC
- Số chân Digital I/O: 14 (6 chân hardware PWM)
- Số chân Analog: 6 (độ phân giải 10bit)
- Dòng tối đa trên mỗi chân I/O: 30 mA
- Dòng ra tối đa (5V): 500 mA
- Dòng ra tối đa (3.3V): 50 mA
- Bộ nhớ flash: 32 KB (ATmega328) với 0.5KB dùng bởi bootloader - SRAM: 2 KB (ATmega328) - EEPROM: 1 KB (ATmega328)
2.3 Cảm biến Encoder
Encoder là loại cảm biến vị trí, đưa ra thông tin về góc quay dưới dạng số mà không cần bộ ADC. lOMoAR cPSD| 45349271
Hình 2.3 Encoder 400 xung 2 pha AB/ 5-24V Thông số kỹ thuật - Xung: 400 xung/vòng
- Điện áp hoạt động: 5-24VDC
- Tốc độ quay tối đa: 5000 vòng/phút
- Tần số điện áp ứng điện: 20K/giây
- Chiều dài cáp tiêu chuẩn: 2m
- Kích thước: Kích thước thân encoder đường kính: φ38mm, trục φ6 x 13mm, đế trục:
dày 5mm, đường kính φ20mm, lỗ bắn vít: vít M3.
- lỗ nằm trên đường tròn đường kính 30mm, 3 lỗ khác nằm trên đường tròn đường kính 28mm. 2.3.1 Cấu tạo
Hình 1.2 Cấu tạo của encoder
- Đĩa quay được khoét lỗ gắn vào trục động cơ.
- Một đèn LED làm nguồn phát sáng và một cảm biến quang điện ( mắt thu ) được bố trí thẳng hàng.
- Mạch khuếch đại tín hiệu. lOMoAR cPSD| 45349271
2.3.2 Nguyên lý hoạt động của encoder
Nguyên lý cơ bản của encoder, đó là một đĩa tròn xoay, quay quanh trục. Trên đĩa có
các lỗ (rãnh). Dùng một đèn led để chiếu lên mặt đĩa. Khi đĩa quay, chỗ không có lỗ (rãnh),
đèn led không chiếu qua được, chỗ có lỗ (rãnh), đèn led sẽ chiếu xuyên qua. Khi đó, phía
mặt bên kia của đĩa đặt một con mắt thu (photosensor). Với các tín hiệu có, hoặc không có
ánh sáng chiếu qua, người ta sẽ ghi nhận được đèn led có chiếu qua lỗ hay không. Số xung
đếm được và tăng lên nó tính bằng số lần ánh sáng bị cắt. Như vậy là encoder sẽ tạo ra các
tín hiệu xung vuông và các tín hiệu xung vuông này được cắt từ ánh sáng xuyên qua lỗ.
Nên tần số của xung đầu ra sẽ phụ thuộc vào tốc độ quay của tấm tròn đó. Đối với encoder
có 2 tín hiệu ra lệch pha nhau 90o. Hai tín hiệu này có thể xác định được chiều quay của động cơ.
Hình 1.3 Nguyên lý hoạt động của Encoder
2.3.3 Phân loại Encoder
Có hai dạng encoder chính là: absolute encoder và incremental encoder.
a. Absolute encoder ( encoder tuyệt đối )* Cấu tạo:
- Sử dụng đĩa mã nhị phân hoặc Gray.
- Encoder kiểu tuyệt đối, kết cấu gồm các phần sau: bộ phát ánh sáng ( led phát ), đĩa
mã hóa ( chứa các dải băng mang tín hiệu ) và một bộ thu ánh sáng nhạy với ánh
sáng từ bộ phát ( bộ thu thường là photosensor ). lOMoAR cPSD| 45349271
Hình 1.4 Kết cấu và nguyên lý
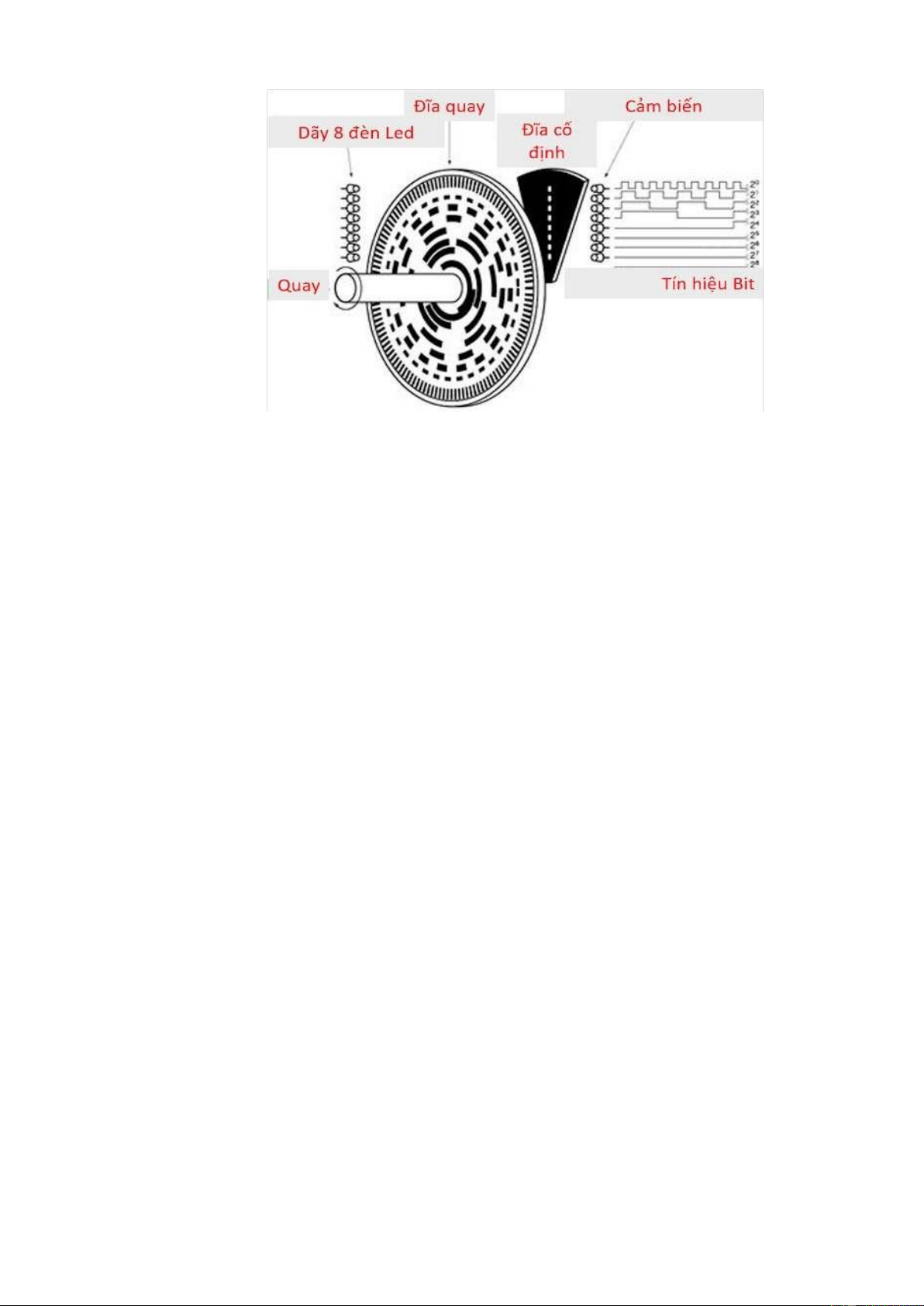
* Nguyên lý hoạt động:
Ba bộ phận quan trọng nhất cấu thành encoder tuyệt đối là đèn led, đĩa mã hóa và các
photosensor. Ánh sáng được chiếu từ đèn led qua đĩa mã hóa đến các photosensor. Số đèn
led bằng với số dài băng (hay còn gọi là vòng lỗ ) trên đĩa mã hóa và cũng bằng với số
photosensor (hoặc cũng có thể dùng một đèn led nhưng công suất của đèn này phải lớn,
ánh sáng của nó phải chiếu phủ hết các dải băng trên đĩa mã hóa). Trên encoder, đèn led,
dải băng và photosensor phải sắp sếp nằm trên 1 đường thẳng. Đèn led và photosensor
được gắn cố định trên vỏ encoder. Còn đĩa mã hóa thì quay quanh trục mang các tín hiệu
mã hóa nhằm xác định góc quay. Khi ánh sáng từ nguồn sáng chiếu tới đĩa mã hóa, nếu đối
diện với tia sáng là vùng diện tích trong suốt, ánh sáng xuyên qua đĩa đến photosemsor làm
xuất hiện dòng chảy qua photosensor, lúc này photosensor này nhận tín hiệu 1 trong mã
nhị phân. Nếu đối diện với tia sáng là vùng diện tích bị phủ lớp chắn sáng, ánh sáng không
đến được photosensor, lúc này photosensor này nhận được tín hiệu 0 trong mã nhị phân.
b. Incremental encoder ( encoder tương đối ). * Cấu tạo:
Về cơ bản thì encoder tương đối và encoder tuyệt đối đều giống nhau chỉ khác nhau
ở đĩa mã hóa. Ở encoder tương đối đĩa mã hóa gồm 1 dải băng tạo xung. Trên dải băng này
được chia ra làm nhiều lỗ bằng nhau và cách đều nhau (lỗ có thể được thay bằng vật liệu
trong suốt cho ánh sáng truyền qua). Khi đĩa từ quay qua một lỗ thì photosensor nhận được
tín hiệu từ đèn led chiếu qua thì encoder sẽ tăng lên một giá trị trong biến đếm. Để tránh
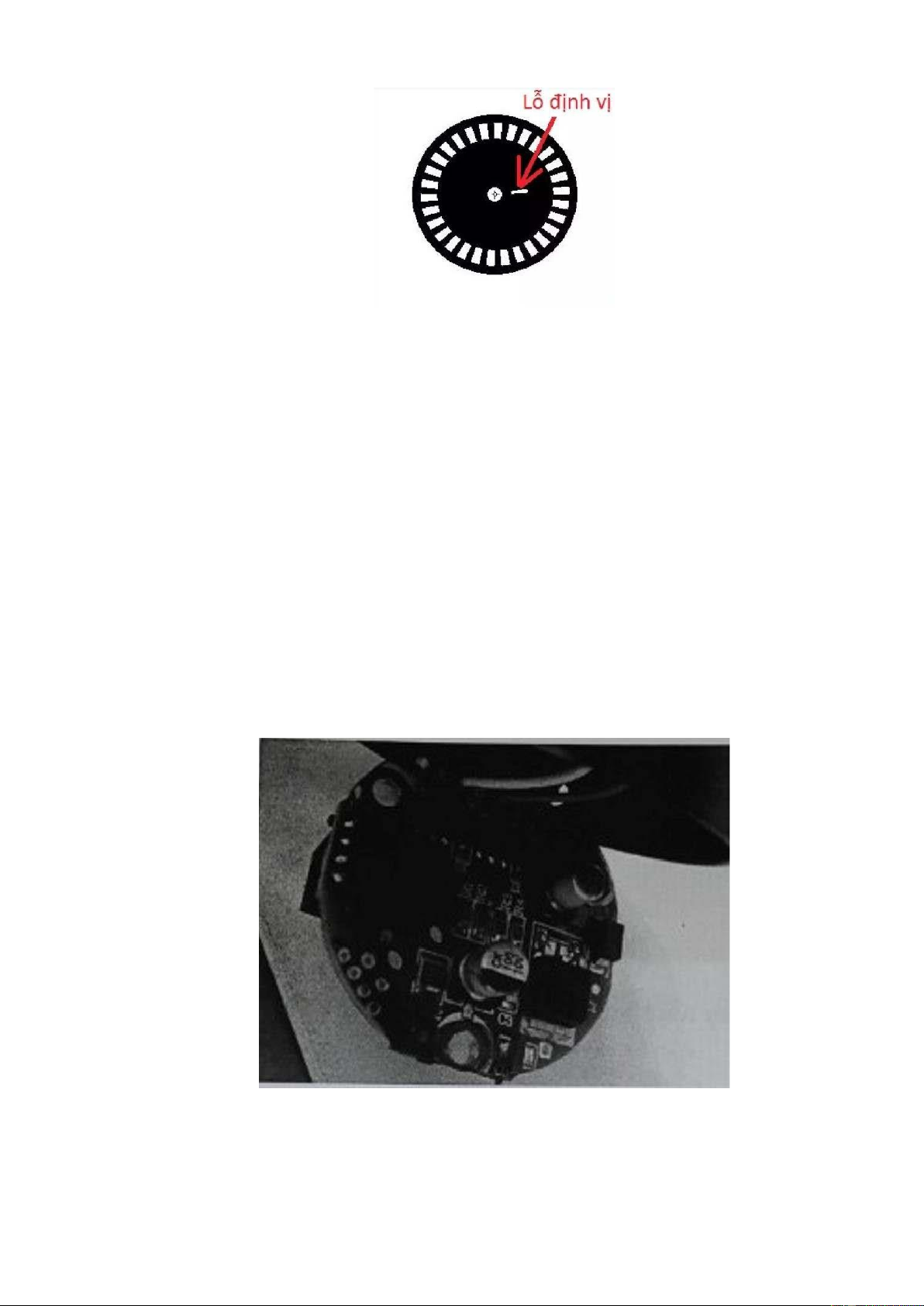
sai số tích lũy sẽ có thêm một lỗ định vị để đếm số vòng đã quay của encoder. lOMoAR cPSD| 45349271
Hình 1.5 Lỗ định vị trên encoder tương đối kiểu quay
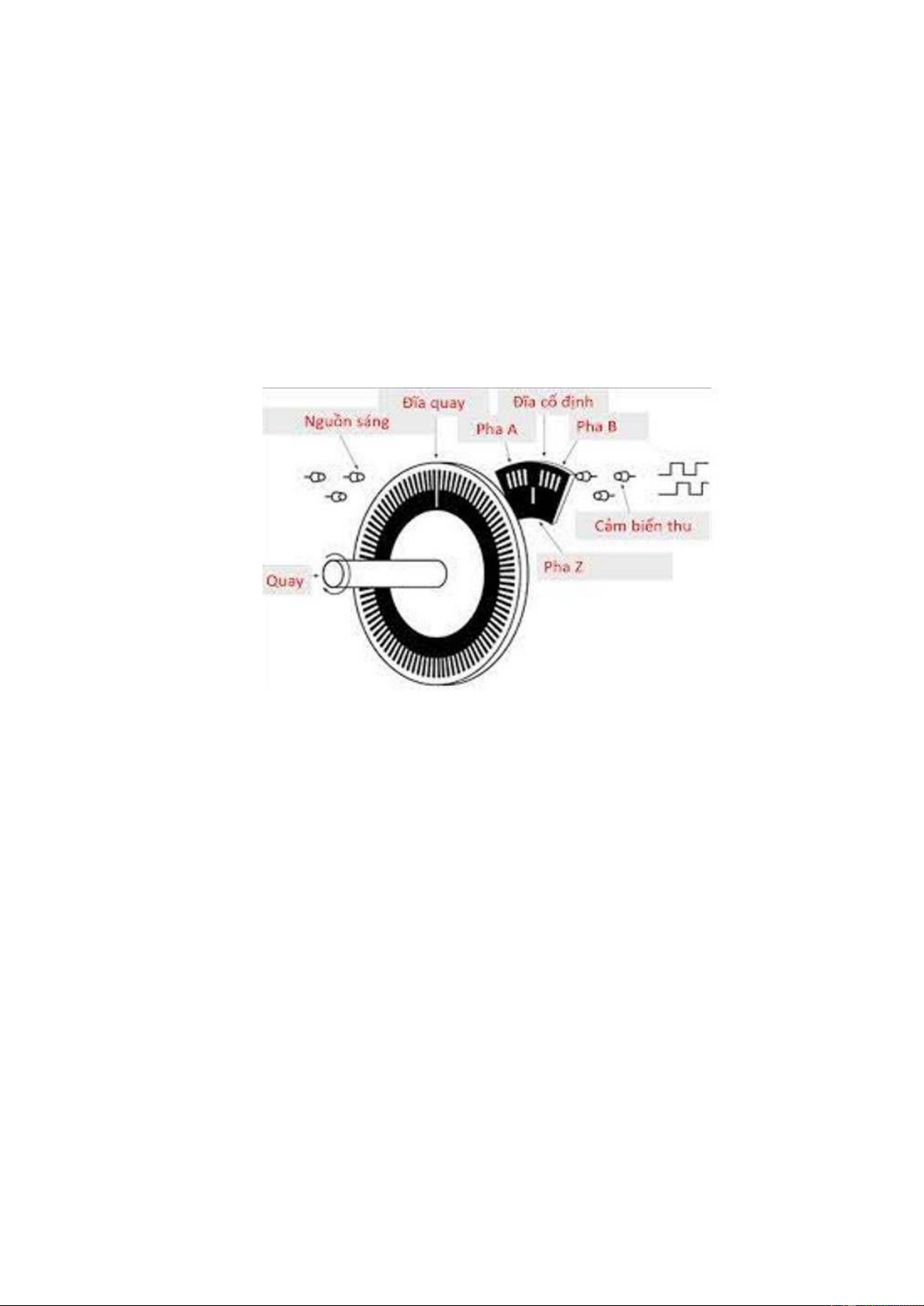
* Nguyên lý hoạt động:
Encoder tương đối cũng gồm các bộ phận cơ bản là nguồn phát (đèn led), đĩa quay
(đĩa mã hóa), cảm biến (photosensor). Khi đĩa quay qua một lỗ thì cảm biến trên nhận được
tín hiệu lúc đó encoder sẽ tăng lên một giá trị trong biến đếm. Cho đến khi cảm biến bên
dưới nhận được tín hiệu thông qua lỗ định vị sẽ biết được đĩa đã quay xong một vòng. Giá
trị biến đếm mà encoder nhận được cho biết được góc độ mà đãi đã quay. Ứng với dải băng
có càng nhiều lỗ thì góc đếm nhỏ nhất mà encoder đếm được sẽ càng nhỏ (càng mịn).
Encoder tương đối kiểu thẳng: encoder kiểu thẳng cũng có các thành phần cơ bản và
nguyên lý hoạt động như encoder kiểu quay nhưng chỉ khác ở chỗ đĩa mã hóa là một thước
thẳng và dùng để đo kích thước thẳng. Chiều dài encoder thẳng phải bằng tổng chuyển
động thẳng tương ứng có nghĩa là chiều dài cần đo phải bằng chiều dài thước. Vì vậy
encoder thẳng thường đắt hơn nhiều so với encoder dạng quay. 2.3.4. Dây dẫn
Hình 2.4 Sơ đồ cấu tạo dây trong encoder
- Dây Red (đỏ) là dây: +(VCC)
- Dây Black (đen) là dây: -(GND) lOMoAR cPSD| 45349271
- Dây White (trắng) là dây: phase A ( xung A)
- Dây Green (xanh) là dây: phase B ( xung B )
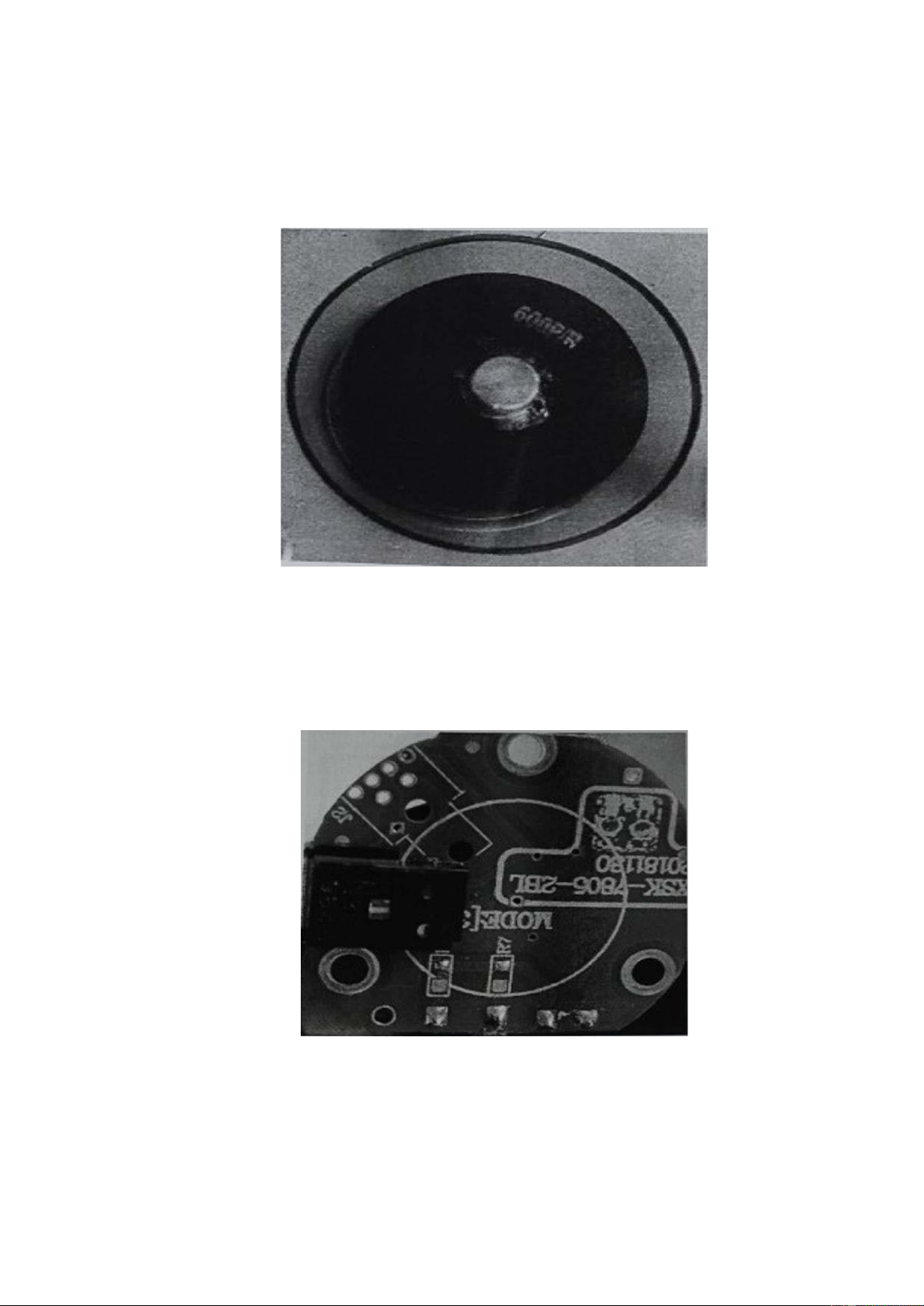
2.3.5. Đĩa encoder: Đĩa encoder 400 xung được thiết kế gồm 1 mặt đĩa gắn liền với trục
của encoder. Trên đĩa encoder được khoét các lỗ nhỏ lên đến 400 lỗ nhỏ quanh vòng đĩa.
Hình 2.5 Cấu tạo đĩa của encoder
2.3.6. Bộ thu phát tín hiệu của cảm biến quang: Để tránh trường hợp phải khắc nhiều
vòng trên encoder thì thay vào đó người ta thiết kế gồm 2 bộ thu phát cảm biến quang đặt
trong encoder và đặt lệch nhau một góc là 90 độ thì lúc này 2 pha của encoder sẽ đọc tín
hiệu từ 1 vòng đĩa khắc tên đĩa encoder.
Hình 2.6 Cấu tạo bộ thu phát cảm biến quang
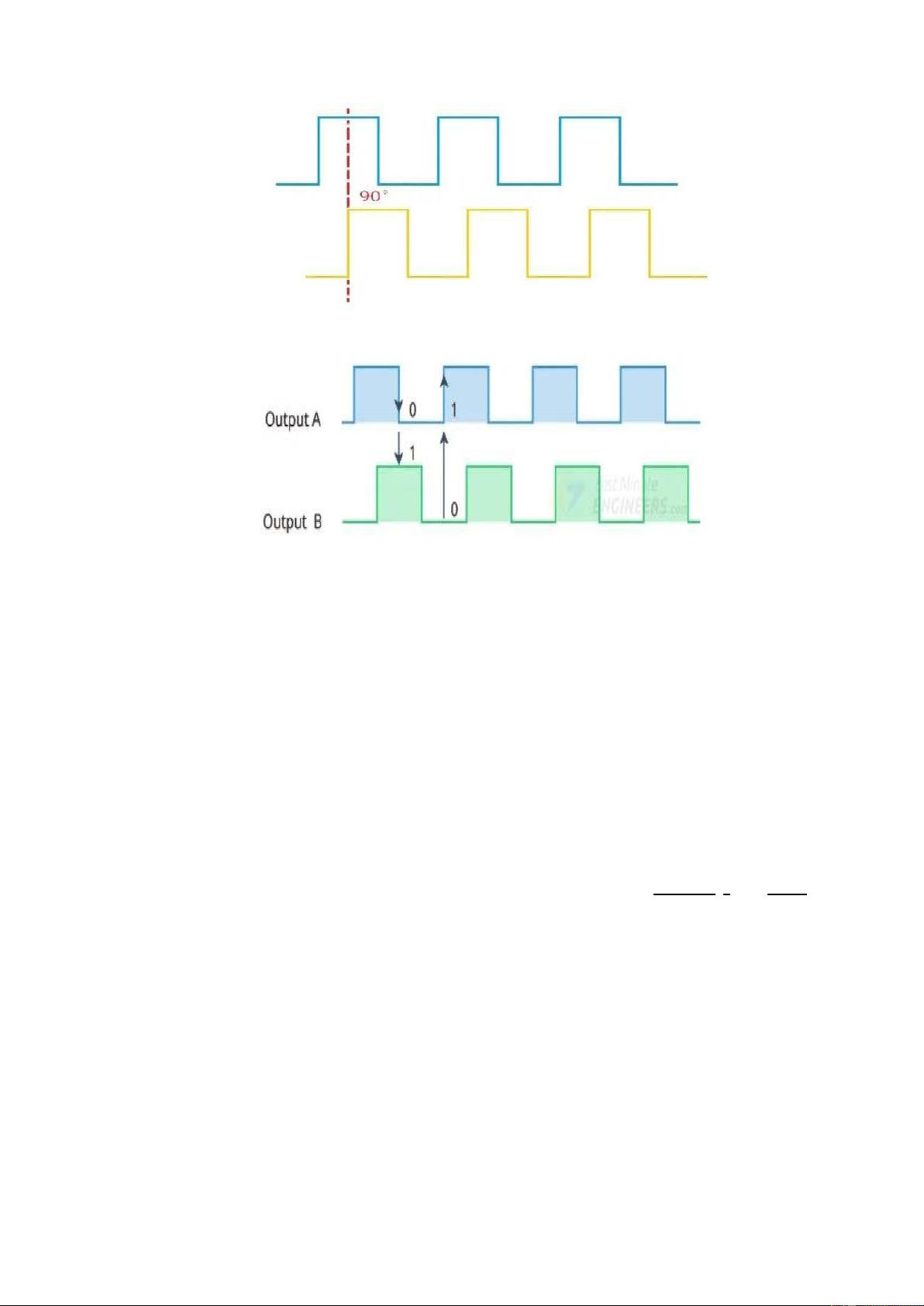
2.3.7. Xử lý tín hiệu từ encoder: là tín ra hiệu số (digital), tín hiệu sẽ luôn chuyển đổi giữa
0V ở mức thấp (nhị phân 0) và 5V ở mức cao (nhị phân 1). lOMoAR cPSD| 45349271
Hình 2.7 Đầu ra encoder
Encoder được đọc thông qua hai chân kỹ thuật số (‘phaseA’ và ‘phaseB’), do đó nó
trả về tín hiệu kỹ thuật số. Mỗi chân sẽ có hai trạng thái: HIGH hoặc LOW. Sự thay đổi
giữa hai trạng thái này sẽ được sử dụng để xác định hướng và tốc độ quay của encoder.
Tín hiệu từ encoder thường được đọc bằng cách sử dụng chân số (digital pins) trên
bo mạch Arduino và thường chúng được kết nối với các chân có khả năng ngắt (interrupt
pins) để có thể theo dõi sự thay đổi trạng thái ngay lập tức khi chúng xảy ra.
Khi động cơ quay đĩa quay của encoder sẽ quay theo, phần led và mắt thu thực hiện
nhiệm vụ tạo ra xung khi có và không có ánh sáng chiếu qua. Xung tạo ra bởi encoder đưa
tới vi điều khiển để tính toán. Thuật toán ở đây là: Số xungSố xung//vònggiây ∗60=¿ vòng/phút.
Kết quả đưa ra LCD gồm tốc độ và chiều quay động cơ. 2.3.8.
Nhiễu và xử lý nhiễu trong encoder
a. Nhiễu trong encoder
- Nhiễu Điện Từ: Có thể phát sinh từ các nguồn năng lượng điện trong môi trường
làm việc và ảnh hưởng đến tín hiệu của encoder.
- Nhiễu Từ Tuyến Tính: Các yếu tố như động cơ hoặc từ từ nhiệt có thể tạo ra nhiễu
tuyến tính, làm giảm độ chính xác của encoder.
Tài liệu liên quan:
-

Giáo trình Quang học Đại học Thái Nguyên
9 5 -

Hệ thống tự động kiểm tra và phân loại phôi dùng PLC môn Cơ điện tử | Trường Đại Học Thái Nguyên
96 48 -

Chọn và Kiểm Tra Thiết Bị Điện môn Cơ điện tử | Trường Đại Học Thái Nguyên
99 50 -

Thiết Kế Hệ Thống Truyền Động Điện môn Cơ điện tử | Trường Đại Học Thái Nguyên
96 48 -

Giải bài tập Cơ học - Vật lý (Chương 1: Phương trình chuyển động) môn Cơ điện tử | Trường Đại Học Thái Nguyên
104 52