Thiết kế người máy RUKA thực hiện mỏ hàn di chuyển theo hình elip trên ống thép đường kính d300(mm), con mèo vậy có chiều cao ở điểm cao nhất là 400(mm), thấp nhất là 250(mm). - Đồ án môn học thiết kế robot công nghiệp
hiết tiếp theo Người máy KUKA thực hiện mỏ hàn di chuyển theo hình elip trên ống thép đường kính d300(mm), con mèo vậy có chiều cao ở điểm cao nhất là 400(mm), thấp nhất là 250(mm). Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời đọc đón xem!
Môn: Cơ điện tử 11 tài liệu
Trường: Đại học Thái Nguyên 375 tài liệu
Tác giả:








Preview text:
lOMoAR cPSD| 45349271
TRƯỜNG ĐẠI HỌC KỸ THUẬT CÔNG NGHIỆP KHOA CƠ KHÍ
BỘ MÔN CƠ ĐIỆN TỬ ĐỒ ÁN MÔN HỌC
THIẾT KẾ ROBOT CÔNG NGHIỆP
Sinh viên: Nguyễn Ngọc Hiếu
Mã số sinh viên: k205520114093 Lớp: K56CDT.02
Ngành: Cơ điện tử Chuyên ngành: Kỹ thuật Cơ điện tử
Ngày giao đề…08/04/2023……………….. Ngày hoàn thành
…………………………..
1. Tên đề tài: Thiết kế Robot KUKA thực hiện mỏ hàn di chuyển theo hìnhelipse
trên ống thép đường kính d300(mm), cắt vát có chiều cao ở điểm cao nhất là
400(mm), thấp nhất là 250(mm). 2. Nội dung thuyết minh 1. Tổng quan. 2. Động học tay máy. 3. Chuyên đề
3. Các bản vẽ, chương trình và đồ thị
Đồ họa kết cấu: AutoCad; Đồ thị biến khớp: Matlab; Phương pháp số: Solver
trên Excel; Mô phỏng kết cấu: SolidWorks, Inventor… TRƯỞNG BỘ MÔN GIÁO VIÊN HƯỚNG DẪN
(Ký và ghi rõ họ tên)
(Ký và ghi rõ họ tên) lOMoAR cPSD| 45349271
ĐÁNH GIÁ CỦA GIÁO VIÊN HƯỚNG DẪN
Tiến trình thông qua đồ án: Tuần Nội dung thông qua GVHD 1 2 3 4 5 6 7 8 9 10
NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN
......................................................................................................................................
....................................................................................................................................…
....................................................................................................................................…
....................................................................................................................................…
....................................................................................................................................…
....................................................................................................................................…
Thái Nguyên, ngày....tháng.....năm 20..… GIÁO VIÊN HƯỚNG DẪN (Ký ghi rõ họ tên)
ĐÁNH GIÁ CỦA GIÁO VIÊN CHẤM
.......................................................................................................................................
.......................................................................................................................................
...........................................................................................................................................
...................................................................................................................................
Thái Nguyên, ngày....tháng.....năm 20....
GIÁO VIÊN CHẤM 1 GIÁO VIÊN CHẤM 2 (Ký ghi rõ họ tên) (Ký ghi rõ họ tên) lOMoAR cPSD| 45349271 MỤC LỤC
LỜI CAM ĐOAN.........................................................................................................5
Lời Nói Đầu..................................................................................................................6
CHƯƠNG 1:Tổng quan về Robot công nghiệp............................................................7
1.1 Lịch sử phát triển.................................................................................................7
1.2 Các khái niệm về Robot.......................................................................................7
1.3 Cấu trúc chung của Robot công nghiệp...............................................................8
1.4 Phân loại robot.....................................................................................................9
1.5 Ứng dụng của Robot............................................................................................9
1.6 Tổng quan robot KUKA:...................................................................................11
1.7 Xác định robot sử dụng......................................................................................21
1.8 Kết luận.............................................................................................................21
CHƯƠNG 2: ĐỘNG HỌC ROBOT...........................................................................22
2.1 Phương trình vòng vector ..................................................................................22 2.2
Phân tích động học.........................................................................................24
2.3 Kết luận.............................................................................................................35
CHƯƠNG 3 MÔ PHỎNG HOAT ĐỘNG CỦA ROBOT KUKA..............................36
3.1 Giới thiệu phần mềm solidworks 2019..............................................................36
3.2 Kết luận.............................................................................................................37 LỜI CAM ĐOAN
Nhóm em xin cam đoan đồ án Robot công nghiệp “Thiết kế
Robot KUKA thực hiện mỏ hàn di chuyển theo hình elipse trên ống thép
đường kính d300(mm), cắt vát có chiều cao ở điểm cao nhất là 400(mm),
thấp nhất là 250(mm)” là công trình nghiên cứu của nhóm sinh viên
bọn em dưới sự hướng dẫn của thầy Chinh. Những nhận định được
nêu ra trong đồ án cũng là kết quả từ sự nghiên cứu trực tiếp, nghêm
túc, độc lập của bản thân dựa vào các cơ sở tìm kiếm , hiểu biết và
nghiên cứu tài liệu khoa học đã được công bố. những phần sử dụng
tài liệu tham khảo trong đồ án đã được nêu rõ trong phần tài liệu
tham khảo , các số liệu , kết quả trình bày trong đồ án là hoàn toàn
trung thực, nếu sai em xin chịu toàn trách nhiệm và mọi kỉ luật của
bộ môn và nhà trường đề ra lOMoAR cPSD| 45349271 Lời Nói Đầu
Trong thời kì công nghiệp hóa, hiện đại hóa đất nước vấn đề tự động hóa sản xuất
có vai trò vô cùng đặc biệt quan trọng. Nhu cầu nâng cao năng suất và chất lượng
sản phẩm ngày càng đòi hỏi ứng dụng rộng rãi các phương tiện tự động hóa sản xuất.
Xu hướng tạo ra những dây chuyền về thiết bị tự động có tính linh hoạt cao đang
hình thành. Vì thế ngày càng tăng nhanh nhu cầu ứng dụng Robot để tạo ra các dây
chuyền sản xuất tự động linh hoạt.
Robot thực hiện gắp vật tự động được nghiên cứu và ứng dụng nhiều trong hệ
thống sản xuất tự động nhằm tăng chính xác về vị trí, liên tục theo chu trình hoạt
động, đảm bảo quá trình sản xuất ổn định, nhanh chóng, đảm bảo về thời gian, nâng
cao năng xuất chất lượng sản phẩm.
Ngày nay robot được dùng rộng rãi trong các nhà máy, được ứng dụng trong
nhiều ngành khoa học công nghệ ví dụ như trong kỹ thuật hàn, trong kỹ thuật gia
công cơ khí, trong khoa học vũ trụ, đại dương và trong nhiều ngành khoa học khác.
Robot có thể thay con người làm việc trong mọi điều kiện khắc nhiệt và những công
việc đòi hỏi độ chính xác cao. Trong tương lai robot sẽ được ứng dụng rộng rãi hơn
trong đời sống hàng ngày.
Ở nước ta lĩnh vực robot đã được nghiên cứu ở các trường đại học và trong các
viện nghiên cứu và đã đặt nên móng cho sự phát triển của ngành khoa học non trẻ
này ở Việt Nam.Trong công nghiệp việt nam, robot cũng được ứng dụng trong các
dây chuyền sản xuất của nhà máy nhằm nâng cao năng suất, hiệu quả lao động và
chế tạo các sản phẩm có độ chính xác cao.
Cùng với sự phát triển của khoa học, tin học và các ứng dụng của robot ngày càng trở
nên quan trọng. Máy tính được sử dụng như là một công cụ thay thế con người
trong việc tính toán các bài toán phức tạp. Nó giúp chúng ta đưa ra kết quả nhanh
và chính xác. Chương trình Maple là một trong những phần mềm tính toán mạnh
và phổ biến giúp chúng ta giải nhiều loại bài toán như: Bài toán phân tích, thống
kê, bài toán cơ học, bài toán nhiệt, bài toán điện kỹ thuật…Ngoài ra nó còn là một
ngôn ngữ lập trình thông dịch khá mạnh giúp cho người kỹ sư tính toán các bài
toán cơ học quen thuộc nhanh chóng và dễ dàng.
CHƯƠNG 1:TỔNG QUAN VỀ ROBOT CÔNG NGHIỆP
1.1 Lịch sử phát triển
- Thuật ngữ robot xuất hiện vào năm 1920 trong một tác phẩm văn học của
nhàvăn Tiệp Khắc tên là Karel Capek.
- Thuật ngữ Inducstrial Robot (IR) xuất hiện đầu tiên ở Mỹ do công ty
AMF(Americal Machine and Foundry Company) quảng cáo mô phỏng một
thiết bị mang dáng dấp và có một số chức năng như tay người được điều khiển
tự động thực hiện một số thao tác để sản xuất thiết bị có tên gọi Versatran. lOMoAR cPSD| 45349271
- Quá trình phát triển của IR được tóm tắt như sau:
+ Từ những năm 1950 ở Mỹ xuất hiện viện nghiên cứu đầu tiên.
+ Vào đầu những năm 1960 xuất hiện sản phẩm đầu tiên có tên gọi là Versatran của công ty AMF.
+Ở Anh người ta bắt đầu nghiên cứu và chế tạo IR theo bản quyền của Mỹ từ những năm 1967.
+Ở những nước Tây Âu khác như: Đức, Pháp, Ý, Thụy Điển thì bắt đầu chế tạo IR từ nhưng năm 1970.
+ Châu Á có Nhật Bản bắt đầu nghiên cứu ứng dụng của IR từ những năm 1968.
+Đến nay, trên thế giới có trên 600 công ty sản xuất IR trong số đó có 400 công
ty của Nhật Bản, 130 công ty của Tây Âu,70 công ty của Mỹ và một số công
ty của Nga, Tiệp Khắc … Trong đó các công ty sản xuất Robot lớn nhất thế
giới có thể kể ra như là: ABB, FANUC, YASKAWA…
1.2 Các khái niệm về Robot
- Robot còn có những cách định nghĩa khác như sau:
+ Tiêu chuẩn quốc tế ISO 8373 định nghĩa rô-bốt như sau: "Đó là một loại máy
móc được điều khiển tự động, được lập trình sẵn, sử dụng vào nhiều mục đích
khác nhau, có khả năng vận động theo nhiều hơn 3 trục, có thể cố định hoặc
di động tùy theo những ứng dụng của nó trong công nghiệp tự động."
+ Joseph Engelberger, một người tiên phong trong lĩnh vực rô-bốt công nghiệp
nhận xét rằng: "Tôi không thể định nghĩa rô-bốt, nhưng tôi biết loại máy móc
nào là rô-bốt khi tôi nhìn thấy nó!!".
+ Từ điển Cambridge trực tuyến định nghĩa rô-bốt rằng: "Đó là một loại máy có
thể thực hiện những công việc một cách tự động bằng sự điều khiển của máy tính".
+ Người máy hay Rô-bốt là công cụ cơ điện tử, thủy lực, nhân tạo ảo ... thay thế
con người trong công nghiệp hay môi trường nguy hiểm. Rôbốt còn là công cụ để
giúp con người giải trí, tìm hiểu khoa học. 1.3 Cấu trúc chung của Robot công nghiệp
Một RBCN được cấu thành bởi các hệ thống sau:
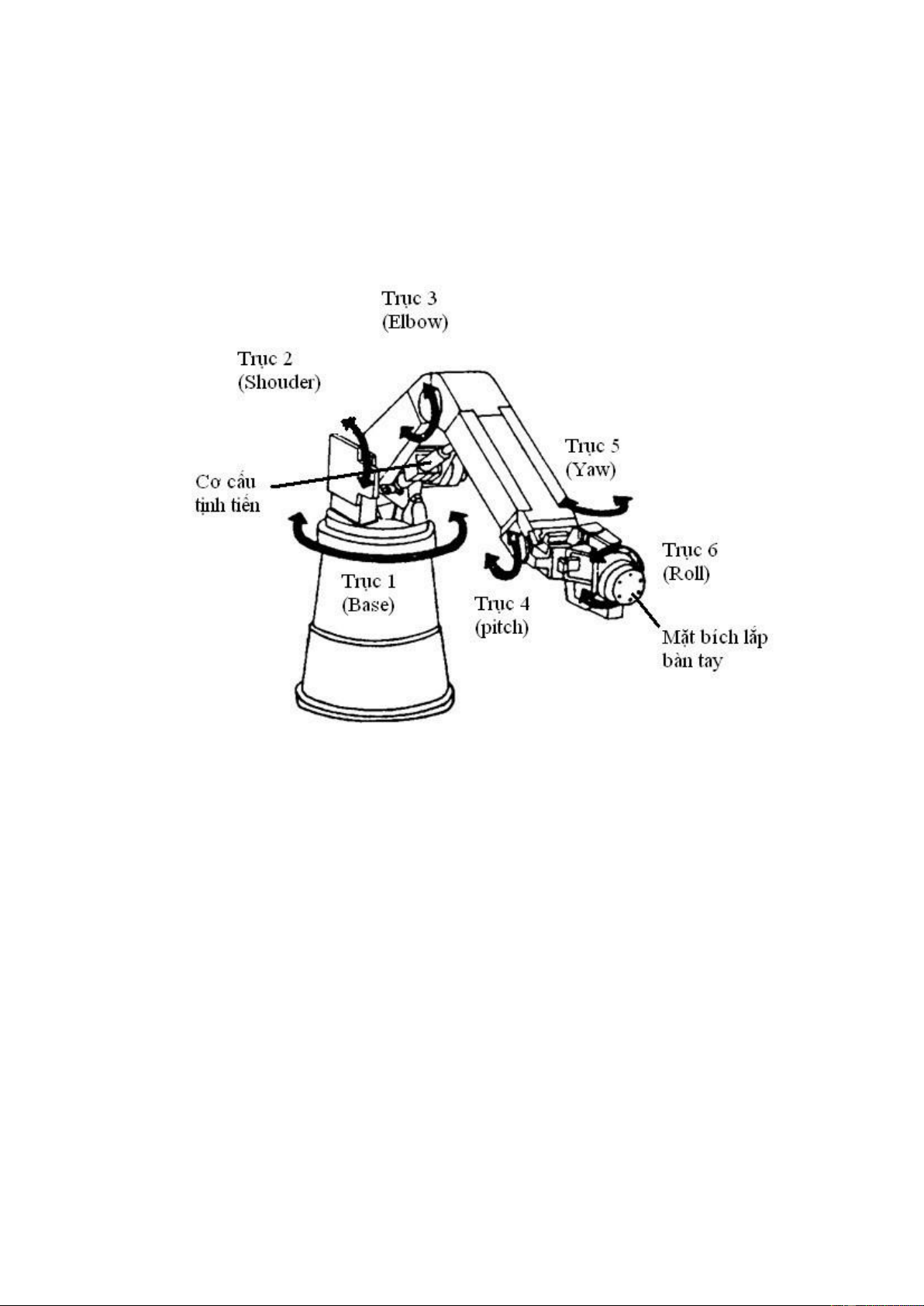
+ Tay máy (Manipulator) là cơ cấu cơ khí gồm các khâu, khớp. Chúng hình thành
cánh tay để tạo các chuyển động cơ bản, cổ tay tạo lên sự khéo léo, linh hoạt
vá bàn tay (End Effector) để trực tiếp hoàn thành các thao tác trên đối tượng. lOMoAR cPSD| 45349271
+ Cơ cấu chấp hành tạo chuyển động cho các khâu của tay máy. Nguồn động lực
của các cơ cấu chấp hành là động cơ các loại: điện, thủy lực, khí nén hoặc kết hợp giữa chúng.
+ Hệ thống cảm biến gồm các sensor và thiết bị chuyển đổi tín hiệu cần thiết khác.
Các robot cần hệ thống sensor trong để nhận biết trạng thái của bản thân các
cơ cấu của robot và các sensor ngoài để nhận biết trạng thái của môi trường.
+ Hệ thống điều khiển (controller) hiện nay thường là máy tính để giám sát và
điều khiển hoạt động của Robot 1.4 Phân loại robot
Trong công nghiệp có 4 yếu tố chính để phân loại robot như sau:
- Theo không gian làm việc - Vùng giới hạn tầm hoạt động của robot được gọi
làkhông gian làm việc gồm có: Robot tọa độ vuông góc, robot toạ độ trụ, Robot
toạ độ cầu, Robot khớp bản lề
- Phân loại theo thế hệ
- Phân loại theo bộ điều khiển gồm có: Robot gắp - đặt, Robot đ ờng dẫn liênƣ tục
- Phân loại robot theo nguồn dẫn động gồm: Robot dùng nguồn cấp điện,
Robotdùng nguồn khí nén, Robot dùng nguồn thuỷ lực
- Phân theo tính năng robot lOMoAR cPSD| 45349271
1.5 Ứng dụng của Robot
- Ngày nay, chúng ta có thể thấy ứng dụng của robot có mặt hầu như ở mọi
lĩnhvực, trong đó lĩnh vực công nghiệp chiếm đại đa số. Ngoài ra còn nhiều lĩnh
vực khác như là quốc phòng, dân sinh, y tế...cũng rất được quan tâm
- Ứng dụng của robot trong công nghiệp đã có từ rất lâu với sự đa dạng về
chủngloại cũng như công việc không chỉ là nâng, kéo, thả, mang vật nặng và
phân loại, sắp xếp sản phẩm mà còn đảm nhận những công việc phức tạp như:
- Phục vụ máy CNC và các hệ thống tự động linh hoạt. - Đúc. - Lắp ráp, đóng gói. - Phun, phủ. - Tự động hàn.
- Đảm nhận thực hiện cấp phôi phục vụ các nguyên công trong các dây chuyềnsản xuất tự động. - Chế tạo máy. - Kiểm tra. - Sơn.
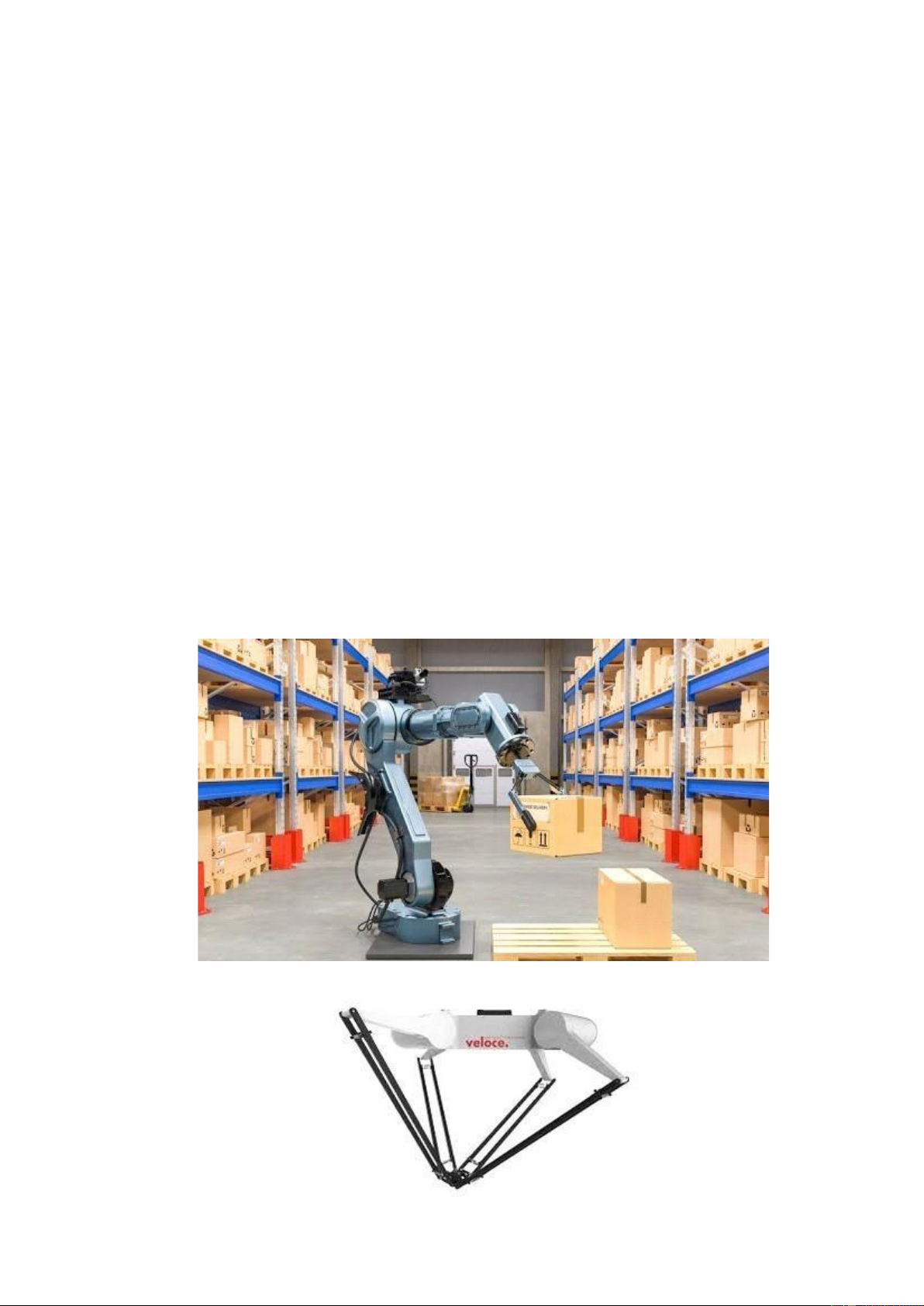
- Một số hình ảnh Robot công Nghiệp:
Hình 1.1: Robot chuỗi lOMoAR cPSD| 45349271
Hình 1.2: Robot song song
1.6 Tổng quan robot KUKA:
* Robot KUKA đời vào năm 1898, Robot công nghiệp KUKA sẽ bao gồm 3 thành
phần cơ bản như sau: Cánh tay robot, Tủ điện điều khiển, Tay dạy (smart PAD).
1. Cánh tay robot: Là nơi thực hiện các công việc cơ học của robot, ví dụ như
vận chuyển/ xếp lớp hàng hóa, thực hiện các thao tác hàn/ cắt kim loại, ... v.v.
- Cánh tay là nơi lắp đặt các động cơ servo, cảm biến báo góc và cơ cấu chấp hành.
2. Tủ điện điều khiển:Tủ điện được ví như là trung tâm bộ não của robot. Là nơi
xử lý các chương trình, tác vụ điều khiển.
- Thông thường, tủ điện điều khiển robot KUKA sẽ bao gồm 1 CPU máy tính công
nghiệp, các Driver servo và các module I/O, truyền thông.
3. Tay dạy (Teach pendant)Tay dạy của robot KUKA cũng được gọi với một tên
khác là smartPAD. Tay dạy cho phép người vận hành/ lập trình truy cập vào giao
diện điều khiển robot một cách dễ dàng và trực quan. ∗ Một số hình ảnh robot KUKA trong công nghiệp:
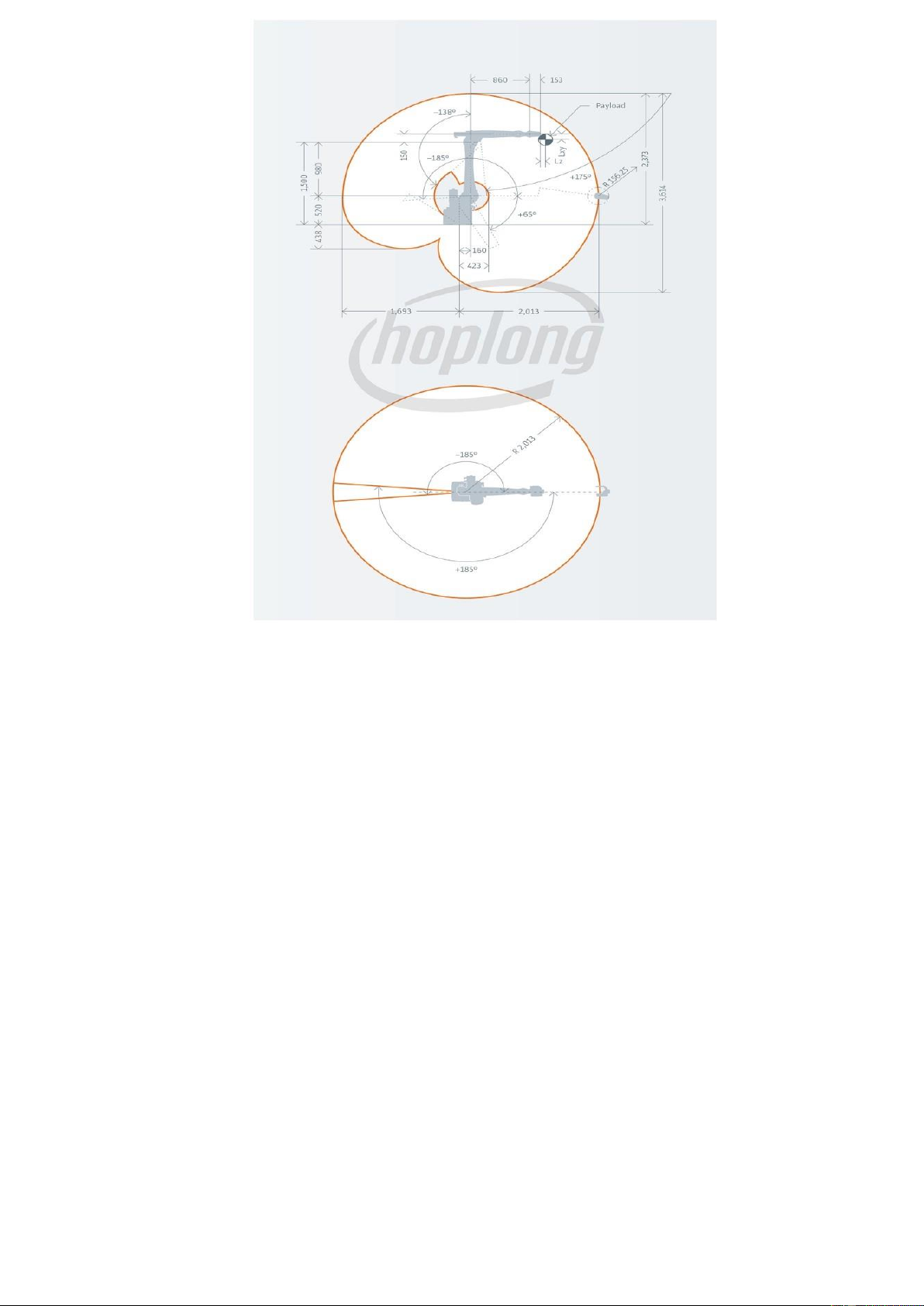
Hình 1.3 Hình ảnh robot KUKA KR6-R1840_2 lOMoAR cPSD| 45349271
Hình 1.4 Tầm hoạt động của robot
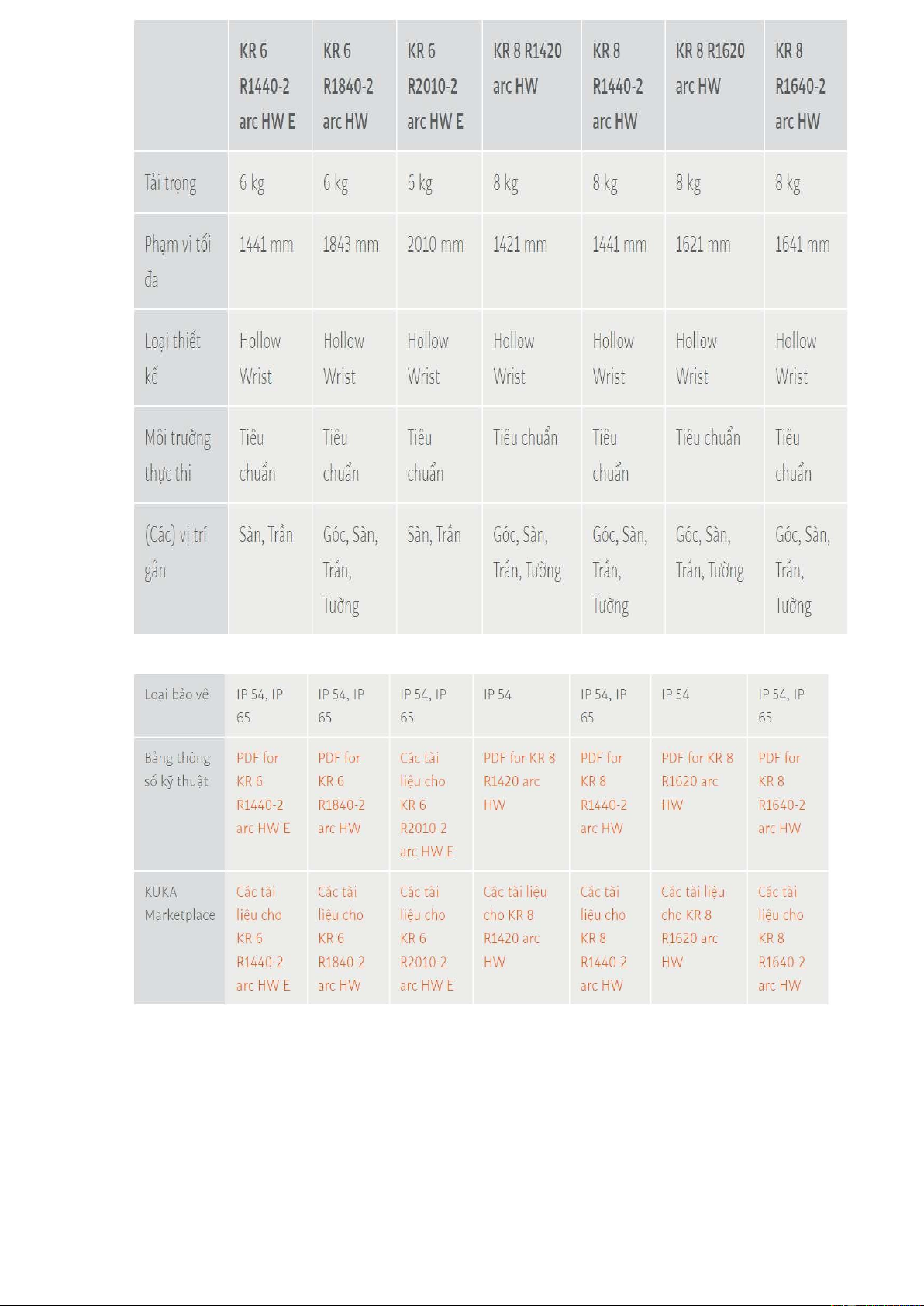
* Ưu điểm của robot KUKA KR-6 R1840_2
- Robot linh hoạt, không tốn kém cho các ứng dụng như hàn được che chắn
khí,dán và ứng dụng hoặc cắt
- Với cấu trúc bộ điều khiển mới, các robot công nghiệp thuộc dòng
KRCYBERTECH nano ARC cực kỳ chính xác và nhanh chóng. Các giá trị gia
tốc và công thái học mới với ít đường viền gây rối đảm bảo đường sắt di chuyển
ở mức cao nhất - thậm chí sâu bên trong các bộ phận - Với trọng tải rất tốt là 6 - 8 kg.
- Có thể lắp đặt mọi vị trí với Robot có thể được gắn trên sàn, tường, trần
nhàhoặc góc - tùy theo yêu cầu
- Phần mềm bổ sungVới các chế độ chuyển động kỹ thuật số, có thể dễ dàngđiều
chỉnh hiệu suất của rô bốt thông qua bộ điều khiển rô bốt - ví dụ: cho độ chính
xác hoặc tốc độ được tối ưu hóa
- Giảm TCO của Nhờ có tuổi thọ dài và trục 4-6 không cần bảo dưỡng, bạn cóthể
giảm TCO của mình một cách bền vững.
- Thích hợp cho các ô nhỏ gọn Với thiết kế nhỏ gọn và diện tích nhỏ, robot
đảmbảo sử dụng tối ưu không gian trong các ô robot. lOMoAR cPSD| 45349271
- Độ chính xác tối đa
Với độ chính xác lặp lại 0,04 mm các rô-bốt KR CYBERTECH nano ARC hoạt
động cực kì chính xác và chuẩn xác ngay cả ở tốc độ cao.
- Độ linh hoạt cao nhất
Các rô-bốt có thể được lắp đặt trên tường, trên sàn nhà, trên trần nhà hoặc thậm
chí ở một góc cụ thể - theo yêu cầu của
- Phần lõi cổ tay KUKA rỗng
Tay trục rỗng 50 mm là một sự đổi mới hướng tới tương lai: Trục rỗng cho phép
giảm chuyển động trục cơ bản với thời gian chu kỳ ngắn và độ chính xác chuyển động cao nhất. - Bảo vệ ESD
Theo tiêu chuẩn, các robot được bảo vệ khỏi quá trình phóng và nạp tĩnh điện mất
kiểm soát, và do vậy có tính năng an toàn khi mang các thiết bị điện tử. - Mỏng nhỏ gọn
Các rô-bốt công nghiệp đặc biệt nhẹ, mỏng và rất nhỏ gọn. Chúng cung cấp hiệu
suất tối đa với các đường nét nhiễu tối thiểu.
- Không gian trống tối đa
Các rô-bốt KR CYBERTECH nano ARC có một phạm vi làm việc phía sau lớn
và một tầm với dài từ cao xuống thấp. Chúng mở ra không gian làm việc trước
đây chưa thể đạt tới.
-Khả năng linh hoạt cao
Việc sử dụng các bộ điều khiển KUKA tiên tiến cho phép tăng khả năng linh hoạt
với việc tích hợp các trục mở rộng. * Thông số Kỹ thuật lOMoAR cPSD| 45349271
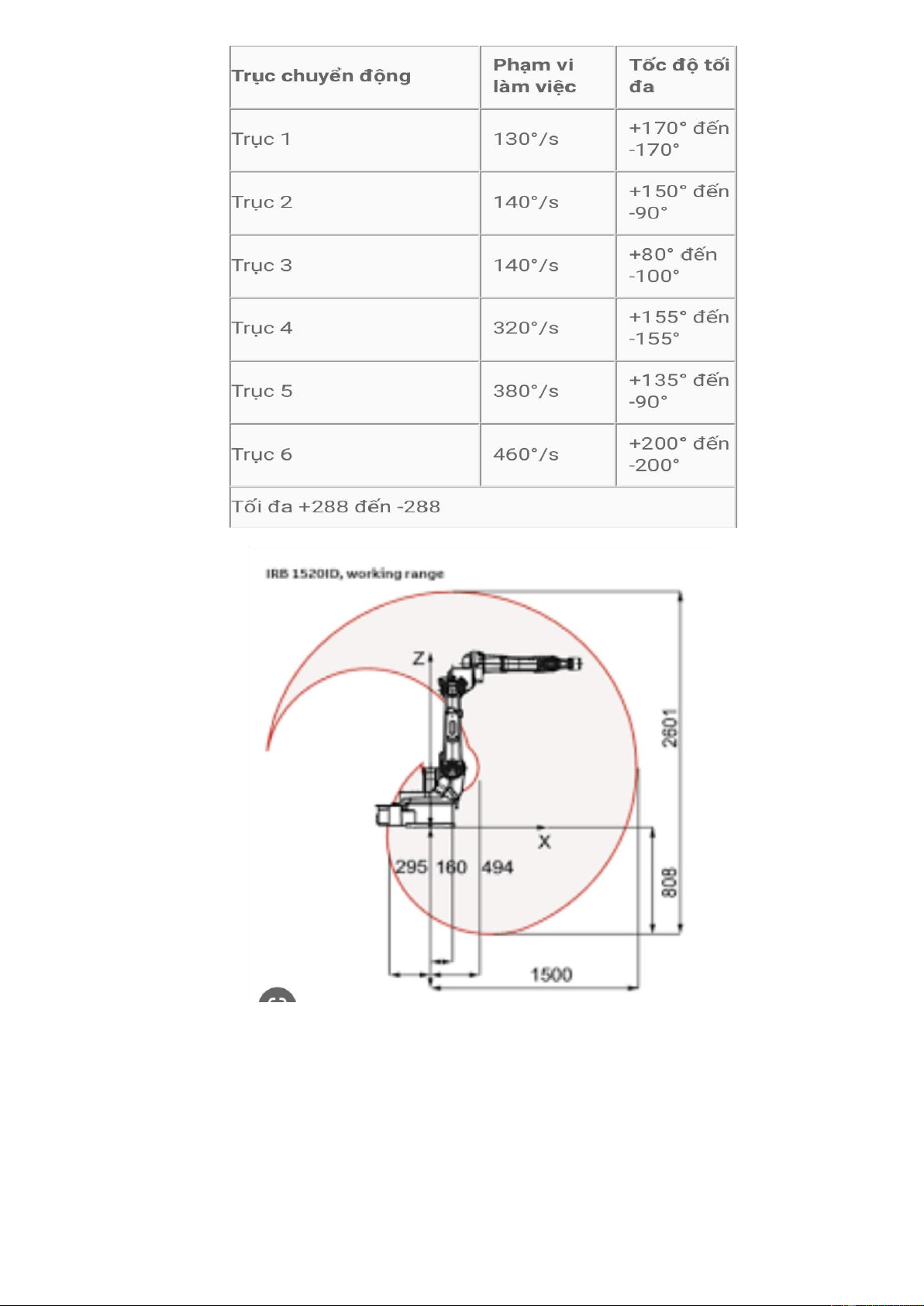
. Giới thiệu Robot IRB 1520ID của hãng ABB
-Robot 1520ID là robot công nghiệp do ABB sản xuất.Thông số chung Khả năng
tải của cánh tay 10kgTầm với1.50mSố trục6Mức độ bảo vệ IP40 .Lắp đặtTrên sàn
hoặc Thông số vật lý Kích thước đế300x300mm .Khối lượng robot170kg .Hiệu
năng(theo ISO 9283) Khả năng lặp lại vị trí0.05mm Khả năng lặp lại đường đi lOMoAR cPSD| 45349271
0.35mm hướng dốc xuống.Tủ đơn, tủ kép Các phiên bản tủ điều khiển IRCS Trục
chuyển động Phạm vi làm việcTốc độ tối đaTrục 1130°/s+170° đến -170° Trục
2140°/s+150° đến -90° Trục 3140°/s+80° đến 100° Trục 4320°/s+155° đến -
155°Trục 5380°/s+135° đến -90° Trục 6460°/s+200° đến -200°Tối đa +288 đến -
288 .Kết nối điện Điện áp cung cấp 380V Nguồn điện têu thụ ISO cube 0.6kW
Môi trường xung quanh tay máy Trong quá trình vận hành+5°C(41°F) đến
+45°C(113°F) Trong quá trình vận chuyển và lưu kho-25°C(13°F) đến
+55°C(131°F)Trong các giai đoạn ngắn(Tối đa 24giờ) đến +70°C(158°F) Độ ẩm
tương đốiTối đa 95% ở nhiệt độ không đổi An toàn Mạch điện kép có giám sát
Điểm dừng khẩn cấp và các chức năng an toàn, thiết bị định vị 3 vị trí Bức xạ Bảo vệ bởi EMC/EMI lOMoAR cPSD| 45349271
. Các thông số kĩ thuật của robot IRB 1520 ID
Hình 1.5: Tầm với của IRB 1520ID
Một số robot khác có khả năng làm việc.
ROBOT hang Yaskawa lOMoAR cPSD| 45349271 ROBOT HÀN HỒ QUANG Model
AR700 AR90 AR144 AR173 AR2010 MA3120 VA1400 II 0 0 0 Số cực 6 6 6 6 6 6 7 Tải( kg) 8 7 12 25 12 6 3 Tầm với ngang 727 927 1440 1730 2010 3121 1434 (mm) Tầm với dọc 1312 1693 2511 3089 3649 5616 2475 (mm) Sai số (mm) ±0.02 ±0.03 ±0.06 ±0.06 ±0.08 ±0.08 ±0.08
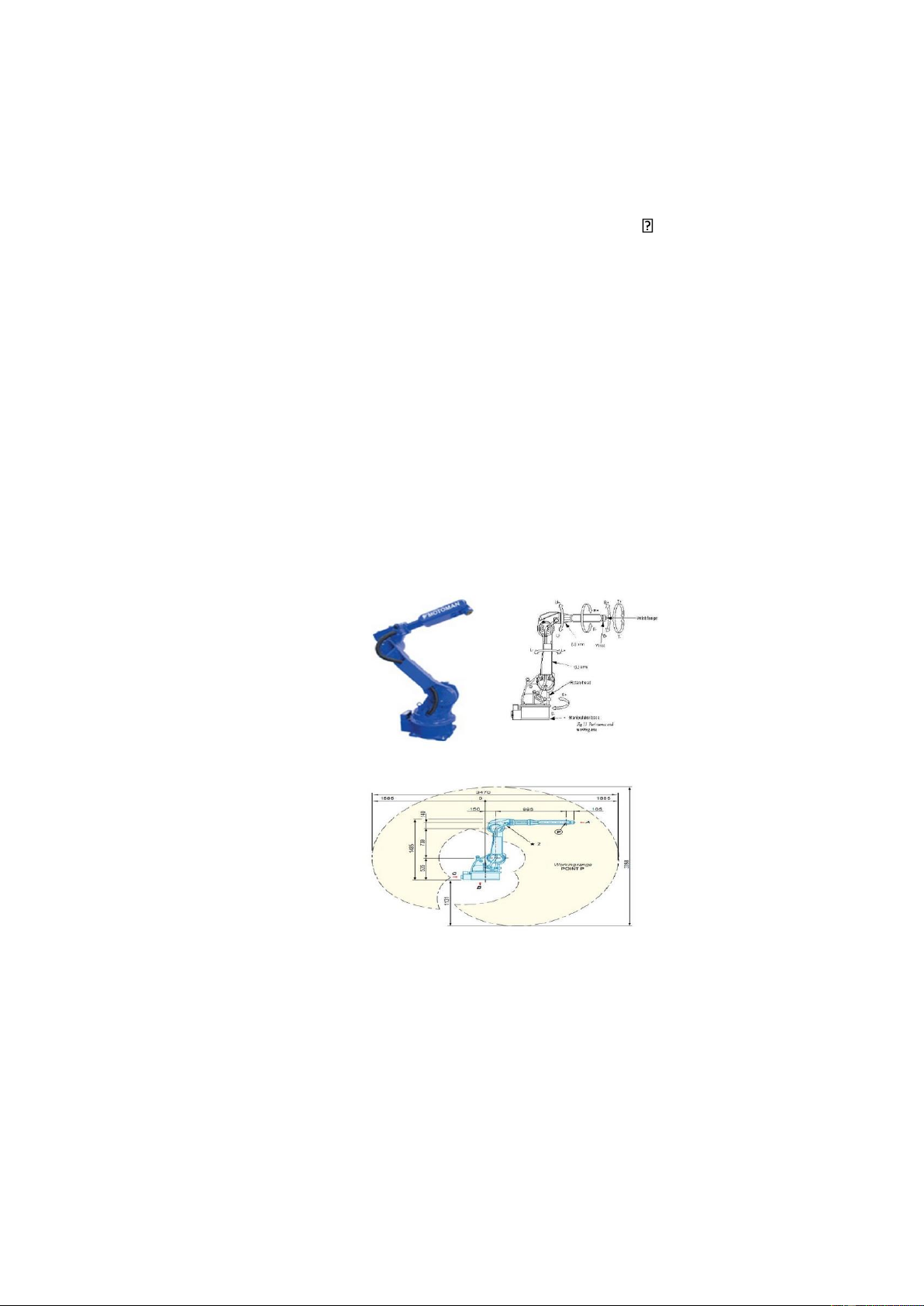
Hình 1.6 Tầm với của ROBOT Hàn ROBOT MOTOMAN lOMoAR cPSD| 45349271 -Giới thiệu chung
Robot Motoman là Robot tác động nhanh, linh hoạt, nhỏ gọn và đáng tin cậy.Đây
là một loại Robot hoạt động tốt với nhiều cài đặt.Nó cũng cung cấp rất nhiều ứng dụng, với
Hiệu suất sử dụng cao, đảm bảo những yêu cầu về chất lượng, thời gian hoàn vốn ngắn.
Motoman được thiết kế cứng và thẳng, điều này dẫn đến độ ồn làm việc thấp, thời gian
Bảo trì lâu. Ngoài ra nó còn được thiết kế nhỏ gọn, cổ tay mỏng, hiệu suất hoạt động cao
Ngay cả trong những vị trí khó. Các ứng dụng
Robot Motoman được ứng dụng rộng rãi vào các dây chuyền sản xuất tự động,
hiện nay các lĩnh vực phổ biến nhất là:
-Các quá trình hàn và nhiệt luyện -Công nghệ gia công lắp ráp.
-Phun sơn,vận chuyển hàng hoá.
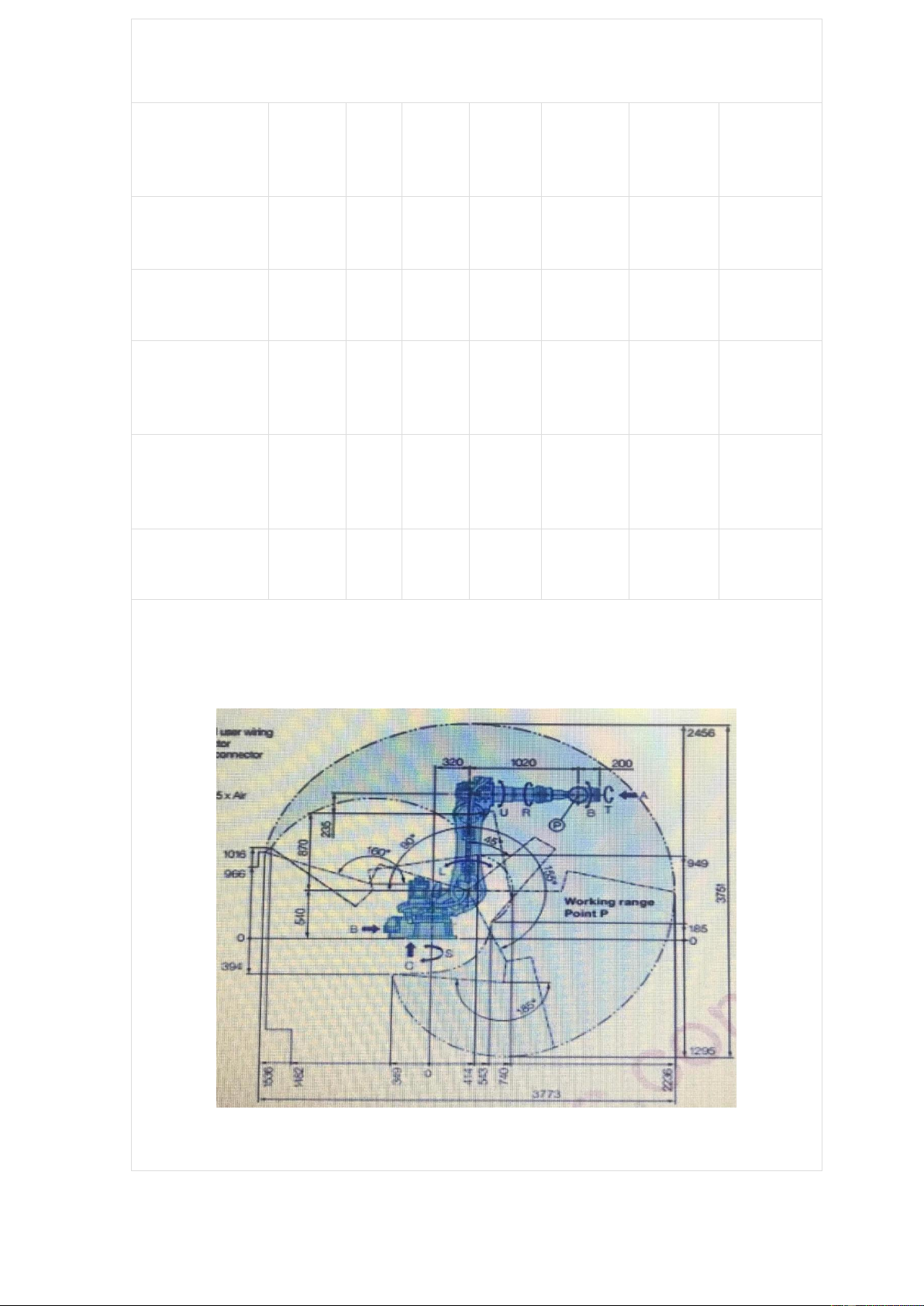
Hình 1.7. Tầm với của ROBOT MOTOMAN
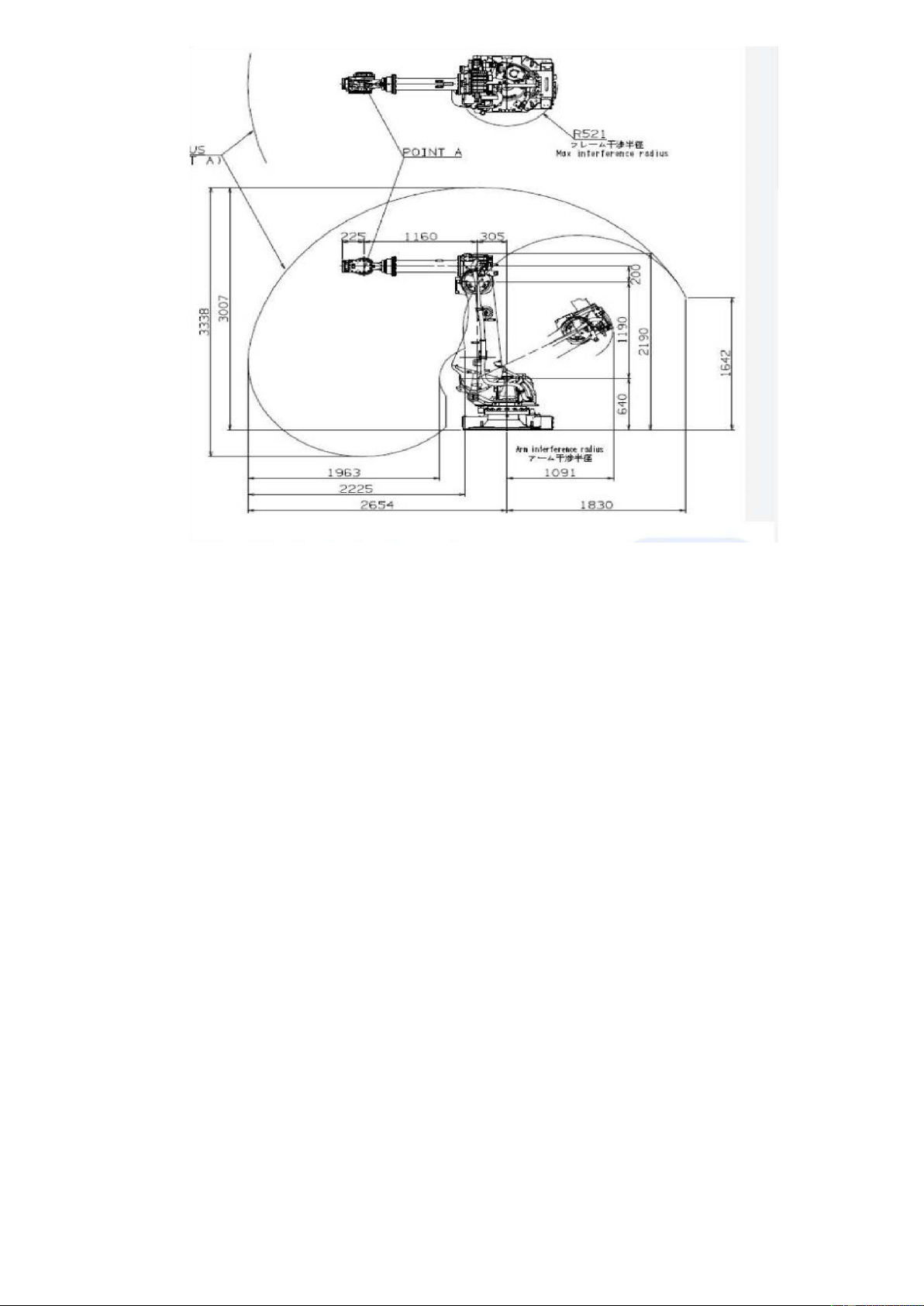
Đặc điểm của robot Nachi SRA166
Cánh tay robot có thể chạm đến khoảng cách 2654 mm
Dây dẫn điều khiển được tích hợp trong cánh tay Robot. Thuận lợi cho việc nối dây điện, dây hơi.
Sử dụng tủ điều khiển FD.
Có thể kết nối vài Robot trong một dây chuyền làm việc. lOMoAR cPSD| 45349271
Thông số kỹ thuật:
Số trục điều khiển: 6 trục.
Khả năng chạm đến cánh tay 2654 mm.
Phương pháp đặt: Đặt đứng.
Phạm vị hoạt động trục J1: (+/-180°) +/-3.14 rad.
Phạm vị hoạt động trục J2: (+60°~-800) +1.05~-1.40 rad.
Phạm vị hoạt động trục J3: (+150°~-146.50) +2.62~-2.56 rad.
Phạm vị hoạt động trục J4: (+/-360°) +/-6.28 rad.
Phạm vị hoạt động trục J5: (+/-135°) +/-2.36 rad.
Phạm vị hoạt động trục J6: (+/-360°) +/-6.28 rad.
Tốc độ tối đa trục J1: 125°/s 2.18 rad/s.
Tốc độ tối đa trục J2: 115°/s 2.01 rad/s.
Tốc độ tối đa trục J3: 121°/s 2.11 rad/s.
Tốc độ tối đa trục J4: 180°/s 3.14 rad/s.
Tốc độ tối đa trục J5: 173°/s 3.02 rad/s.
Tốc độ tối đa trục J6: 260°/s 4.54 rad/s.
Khả năng gắp của cánh tay: 165 kg.
Phụ tải cho phép của cách tay Moment lực trục J4: 951 N.m
Phụ tải cho phép của cách tay Moment lực trục J5: 951 N.m
Phụ tải cho phép của cách tay Moment lực trục J6: 490 N.m
Phụ tải cho phép của cách tay quán tính trục J4: 88.9 kg. m2
Phụ tải cho phép của cách tay quán tính trục J5: 88.9 kg. m2
Phụ tải cho phép của cách tay quán tính trục J6: 45 kg. m2 Sai số vị trí ±0.1 mm
Cấp bảo vệ: Chống nước, chống bụi IP67, IP65, IP54. Trọng lượng: 960 kg
Tủ điều khiển Robot FD:
Sử dụng cho robot tiêu chuẩn 6 trục. Sử
dụng cho robot tối đa 8 trục.
Số chương trình: 9999 chương trình.
Dung lượng bộ nhớ: 256 Mbyte.
Giao tiếp thiết bị ngoại vi: USB, RS232C.
Nguồn cung cấp: 3 pha 200~230 VAC-50/60Hz +/-10%.
Nguồn cung cấp: 3 pha 380~480 VAC-50/60Hz +/-10%.
Kích thước WxDxH: 580x542x590/1180 mm. lOMoAR cPSD| 45349271 Trọng lượng: 62 kg.
Hình 1.8: Tầm với của Nachi SRA166
1.7 Xác định robot sử dụng
- Mô tả nhiệm vụ công nghệ đặt ra
+ Đưa mỏ hàn di chuyển theo hình elipse trên ống thép đường kính , cắt vát chiều cao.
- Xác định các thông số để lựa chọn robot phù hợp
+ Cắt đường kính d300(mm)
+ cắt vát có chiều cao ở điểm cao nhất là 400(mm), thấp nhất là 250(mm).
-Xác định điểm đặt robot, vị trí gốc O0:
+ Vị trí gốc tọa O0(0;0;0)
- Lựa chọn mẫu robot đáp ứng được yêu cầu (tầm với, …..):
+ Từ hai thông số về khoảng cách của sản phẩm em chọn robot KUKA KR- 6 R1840_2
- Đánh giá khả năng đáp ứng được yêu của robot đã chọn: +Robot KUKA
KR-6 R1840_2 đáp ứng đượcyêu cầu. 1.8 Kết luận
Với những thông tin trên ta có thể thấy rằng robot KUKA KR-6 R1840_2
này có thể tối ưu hóa trọng lượng, dễ dàng thích nghi với điều kiện nhà xưởng,
môi trường. không gian làm việc linh hoạt, và an toàn khi vận hành, có thể
làm việc liên tục 24/24 từ đó năng suất được tăng lên đáng kể. lOMoAR cPSD| 45349271
Chương này đã giúp cho chúng ta tìm hiểu về những thông số cơ bản của
robot, để tìm hiểu sâu hơn, hiểu được cách thức làm việc trong không gian,
tính toán và xây dựng được bài toán động học của robot một cách cụ thể.
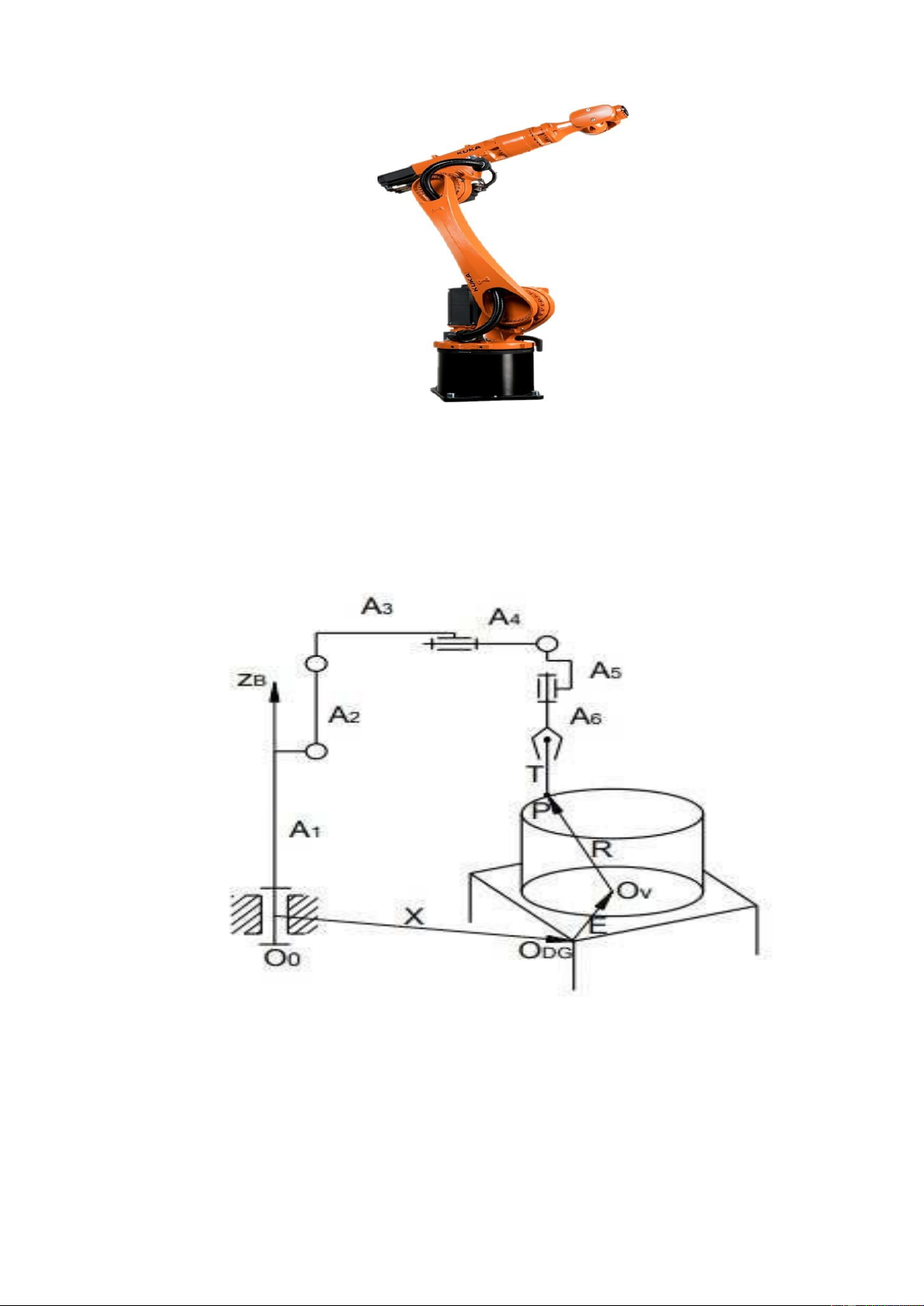
Hình 1.9 Hình ảnh robot sử dụng
CHƯƠNG 2: ĐỘNG HỌC ROBOT
2.1 Phương trình vòng vector lOMoAR cPSD| 45349271
Phương Trình Vòng Vécter : A1A2 ...An .T X.E.R
Theo phép chuyển đổi thuần nhất thế của khâu chấp hành là hàm của các biến khớp, mô
tả bằng ma trận tổng hợp của phép chuyển đổi : n A Ai−i 1 l˙=1 Trong đóAi− 1
i với i = 1 n, là ma trận chuyển đổi giữa hệ toạ độ thứ i đến hệ i-1, xác
định theo quy tắc Denavit-Hartenberg; n là số biến khớp (bậc tự do) của robot. Vị trí và
hướng của khâu chấp hành được xác định từ quỹ đạo cho trước nx sx ax px | | ny sy
A0n= nz sz ayaz pzpy 0 0 0 1
Ma trận chuyển đổi tổng hợp có dạng:
a11 a12 a13 a14 | |
a21 a22 a23a24 X.E.R=
a31 a32 a33 a34 0 0 0 1 ❑ lOMoAR cPSD| 45349271
Các thành phần aijvới i,j =1 3 là các cosin chỉ phương của n,s,a; a14,a24,a34lần lượt là
các thành phần chiếu lên hệ oxyz của p.
Do tính chất trực giao của các vec tơ chỉ phương, cho nên chỉ có ba thành phần trong
các cosin chỉ phương độc lập. Vì vậy kết hợp (2.40) và (2.41) nhận được: sx=a12 ax=a13 apyx==aa2314
{p y =a24 pz=a34
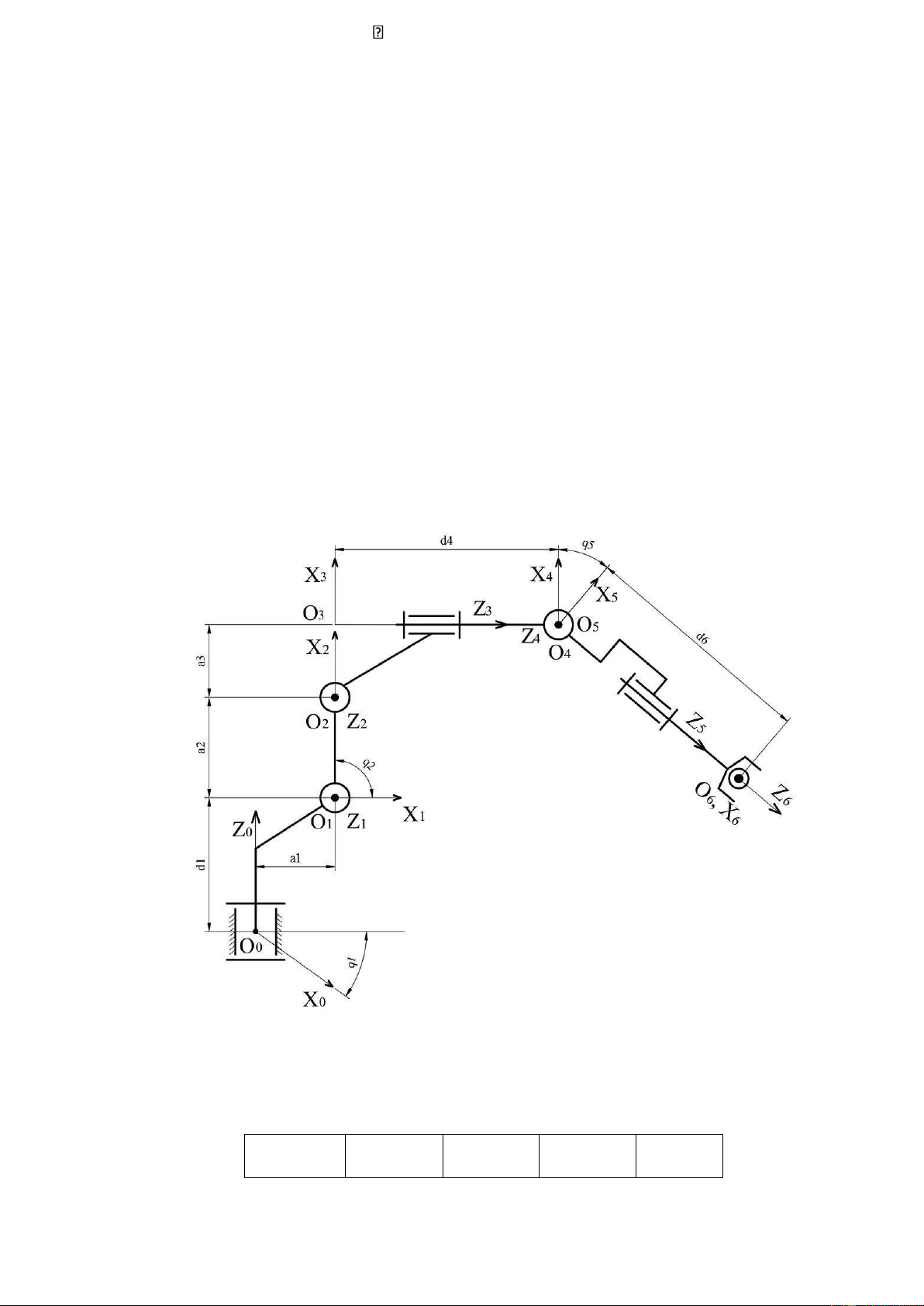
2.2 Phân tích động học •
Mô hình động học •
Xây dựng phương trình động học cho robot Xây dựng bảng D-H Bảng 2.1: Bảng D-H RZ TZ TX RX
Tài liệu liên quan:
-

Hệ thống tự động kiểm tra và phân loại phôi dùng PLC môn Cơ điện tử | Trường Đại Học Thái Nguyên
90 45 -

Chọn và Kiểm Tra Thiết Bị Điện môn Cơ điện tử | Trường Đại Học Thái Nguyên
89 45 -

Thiết Kế Hệ Thống Truyền Động Điện môn Cơ điện tử | Trường Đại Học Thái Nguyên
87 44 -

Giải bài tập Cơ học - Vật lý (Chương 1: Phương trình chuyển động) môn Cơ điện tử | Trường Đại Học Thái Nguyên
99 50 -

Đồ án đo tốc độ động cơ sử dụng encoder môn Cơ điện tử | Trường Đại Học Thái Nguyên
95 48