Hệ thống đóng gói tự động | Tiểu luận môn Công nghệ chế tạo máy Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
Trong các ngành công nghiệp sản xuất hiện nay với nhiều công nghệ tiên tiến và máy móc hiện đại, khi cho ra sản phẩm đến tay người dùng thì mọi công ty, nhà sản xuất đều phải trải qua một bước rất quan trọng nhưng cơ bản, đó là đóng gói sản phẩm, có thể dưới nhiều hình dạng, màu sắc khác nhau. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Công nghệ chế tạo máy 19 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:






Preview text:
KHOA CƠ KHÍ CHẾ TẠO MÁY
BM CÔNG NGHỆ CHẾ TẠO MÁY --- o0o ---
Báo cáo tiểu luận:
HỆ THỐNG ĐÓNG GÓI TỰ ĐỘNG
Người thực hiện: NHÓM 13 1. Hồ Công Huy 20143001
2. Võ Nguyễn Quốc Thịnh 21145285
3. Đặng Thế Quang Vinh 21145320 Thứ: 5 Tiết: 3-4
Người kiểm tra: Dương Thế Phong MỤC LỤC 1. TỔNG QUAN HỆ THỐNG 01 2. XÂY DỰNG GIẢI THUẬT 03
3. HỆ THỐNG ĐIỀU KHIỂN BẰNG PLC 05 4. KẾT LUẬN 10
(kiểm tra lại mấy phần tô vàng) 1. TỔNG QUAN HỆ THỐNG 1.1.
Phác thảo tổng quan hệ thống
- Trong các ngành công nghiệp sản xuất hiện nay với nhiều công nghệ
tiên tiến và máy móc hiện đại, khi cho ra sản phẩm đến tay người dùng thì
mọi công ty, nhà sản xuất đều phải trải qua một bước rất quan trọng nhưng
cơ bản, đó là đóng gói sản phẩm, có thể dưới nhiều hình dạng, màu sắc
khác nhau. Mục đích của việc này nhằm giúp sản phẩm được bảo quản một
cách kĩ lưỡng, lâu dài, giữ vệ sinh sạch, dễ dàng trong vận chuyển và góp
phần tăng tính thẩm mỹ của sản phẩm đó,…Tuy nhiên, để đạt được chỉ tiêu
phải sản xuất nhiều sản phẩm cung cấp cho người tiêu dùng, công việc
đóng gói giờ đây đã không còn phụ thuộc nhiều vào con người , thủ công
mà được thực hiện qua dây chuyền tự động hóa để đạt được độ chính xác
cao. Các nhà sản xuất hiện nay chuyển sang đóng gói sản phẩm thông qua
hệ thống đóng gói tự động.
- Ứng dụng của “mô hình đóng gói tự động” này là giúp cho nhà sản xuất
tăng được năng suất công việc, số lượng sản phẩm, giảm việc thuê lao
động, nhân công, tăng độ chính xác, thẩm mỹ cao cũng như giảm được rủi
ro, sai sót trong quá trình đóng gói, đồng thời đảm bảo an toàn vệ sinh cho sản phẩm.
- Giới hạn: trong project này, nhóm tác giả thực hiện thiết kế hệ thống
đóng gói tự động thông qua các cơ cấu như cơ cấu hút chân không, cơ cấu
xylanh khí nén chuyển phôi, băng tải để chuyển sản phẩm, motor xoay và
hệ thống cảm biến,…và nhiều cơ cấu khác theo sơ đồ dưới đây:
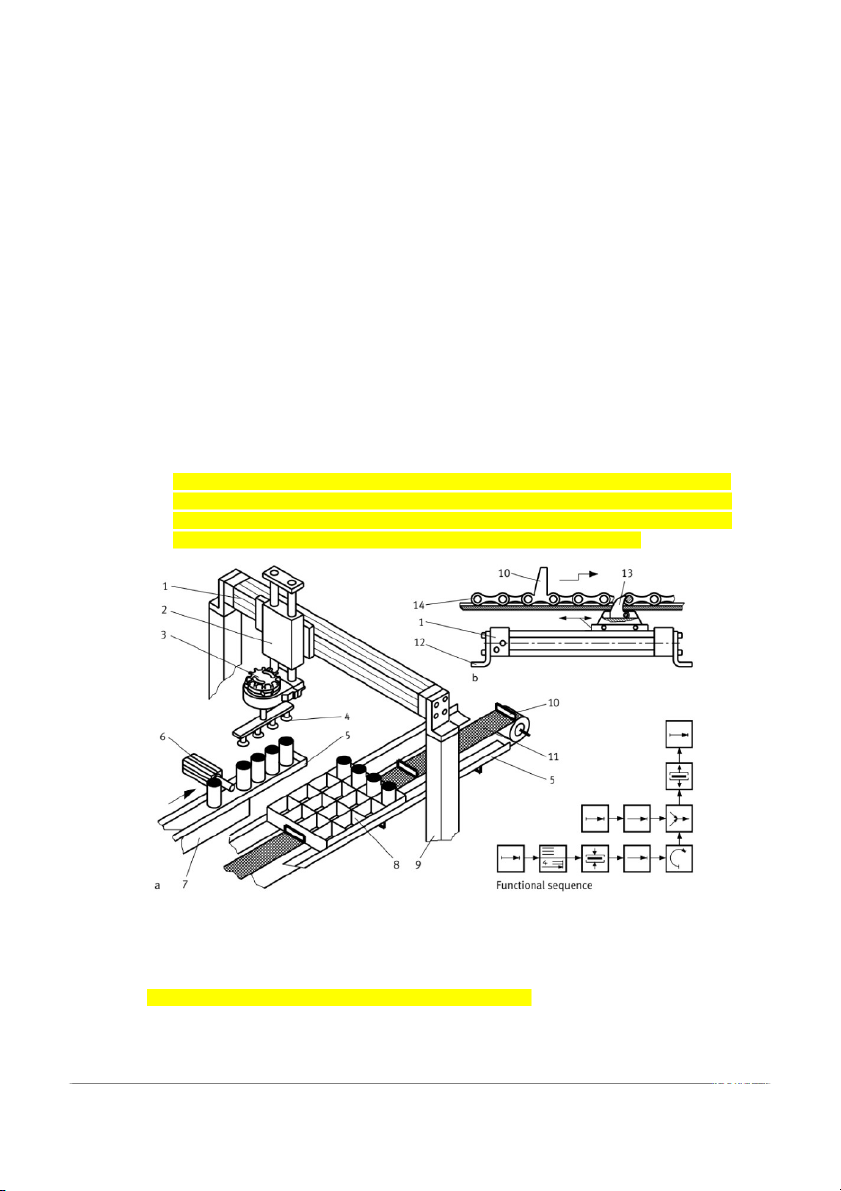
Hình 1.1. Tổng quan hệ thống đóng gói tự động Packing (Cắt từ file “99 Examples”)
Hệ thống đóng gói tự động bao gồm các cơ cấu sau:
Cơ cấu xylanh khí nén chuyển Sản phẩm (1) Cơ cấu nâng trượt (2) Ổ đĩa bán quay (3)
Cơ cấu hút chân không (4)
Khu vực chứa sản phẩm (5) Cơ cấu xylanh chặn (6)
Băng tải rung kiểu thẳng (7) Vật liệu đóng gói (8)
Giá đỡ cơ cấu xylanh khí nén (9) Dẫn động băng tải (10)
Băng tải chuyển sản phẩm sang vị trí đóng gói (11) Chân đỡ băng tải (12) Chốt chặn (13) Mắt xích băng tải (14) (hình xy lanh bổ sung)HUY 1.2.
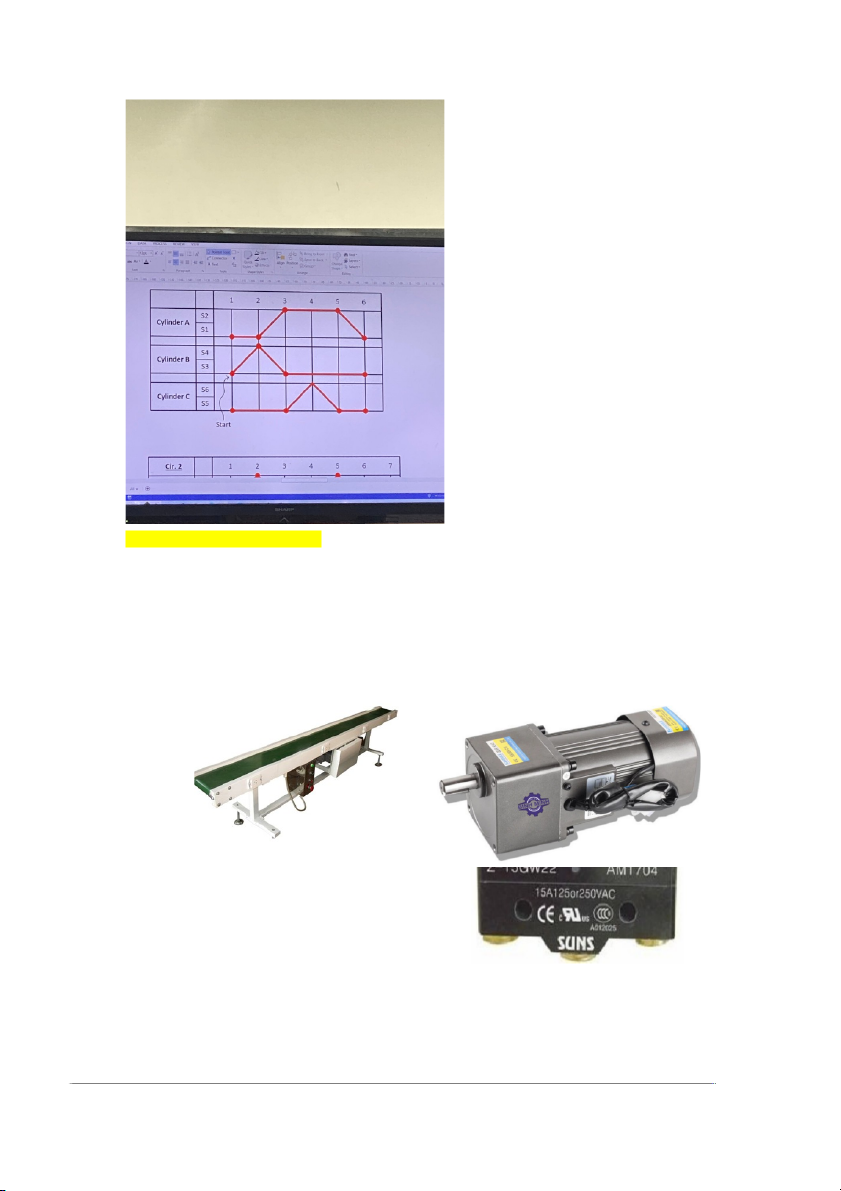
Danh sách trang thiết bị sử dụng
Thông tin, hình ảnh thiết bị sử dụng
Hình 1: Băng tải PVC Hình 2: Mô tơ băng chuyền
Hình 3: Contactor LS MC-22b 220V 22A 11kW 1NC+1NO
Hình 4: Công Tắc hành trình Omron Z- 15GW22
Hình 5: Cầu chì ống có thông số 24VDC - 2A Hình 6: Xy lanh xoay SMC CRB2BWU10
Hình 7: Xy lanh khí nén inox MA Hình 8: Xy lanh
trượt Festo – 532446
Hình 9: Cảm Biến Hành Trình Xilanh Hình 10: Cảm biến áp suất Nuova Fima Model ST18
Hình 12: Van Điện Từ Khí Nén MAC 821C-PP-121BA-155
Hình 11 Cảm biến quang điện E3F- DS10Y13
Hình 13: Giác hút Hình Hình 14: Rơ le nhiệt Siemens 3RU1146-4KB0
Hình 15: Bộ đếm counter H7X Hình 16 Timer Omron H3CR-A8 2. XÂY DỰNG GIẢI THUẬT 2.1.
Tổng quan hệ thống điều khiển (kiểm lại)
Contactor, công tắc hành trình, cảm biến PLC PROGRA M
Động cơ, xylanh, giác hút Giải thích:
- Có 11 cảm biến từ S1 đến S11 trong hệ thống điều khiển gắn vào đầu Input
-Có 5 xy lanh gồm: xy lanh trượt, xy lanh xoay và xy lanh khí nén -Motor băng chuyền -Hai xylanh A và B -C là xylanh xoay -D là xylanh trượt
-E là xylanh hút chân không 2.2.
Yêu cầu vận hành hệ thống
(làm theo dạng này)HUY Start
--- Cảm biến S10 ON --- Counter ON 1 đếm 4 --- Xylanh A (6) đi ra --- Cảm biến S7 ON --- Xylanh A đi vào
Băng Tải MK (11) ON --- Cảm biến S11 ON --- MK OFF ---Xylanh B (2) ra
---Cảm Biến S4 ON--- Cơ cấu hút chân không E (4) ON, bám chặt sản phẩm --- Xylanh B
vào --- S3 ON --- Xylanh D (1) ra ---S8 ON --- Xylanh Xoay C (3) 90 độ ---S6 ON --- Xylanh
B ra ---S4 ON --- Cơ cấu hút chân không Off thả sản phẩm ra --- Xylanh B vào --- S3 ON ---
Xylanh D vào --- S7 ON --- Xylanh C ON --- S5 ON --- lặp lại
Timer Off 2s --- Băng tải ON --- Băng tải OFF ---
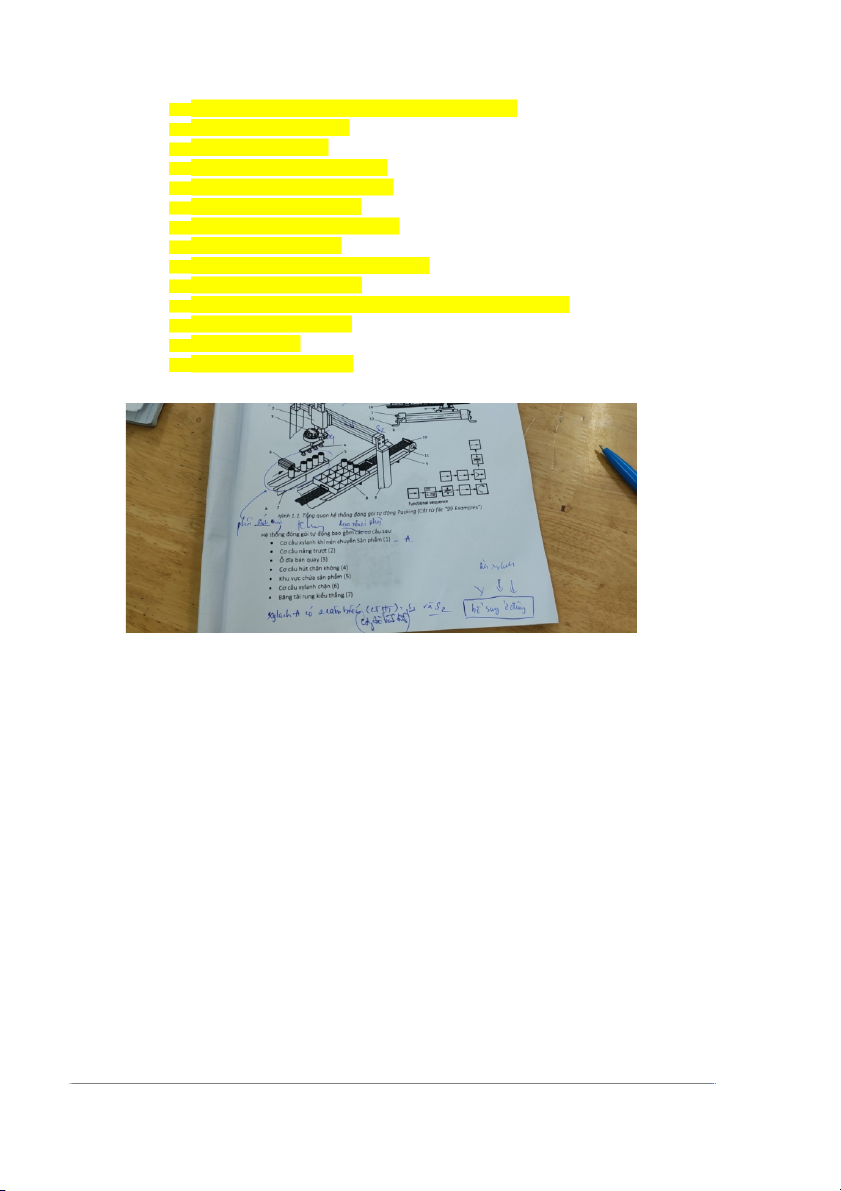
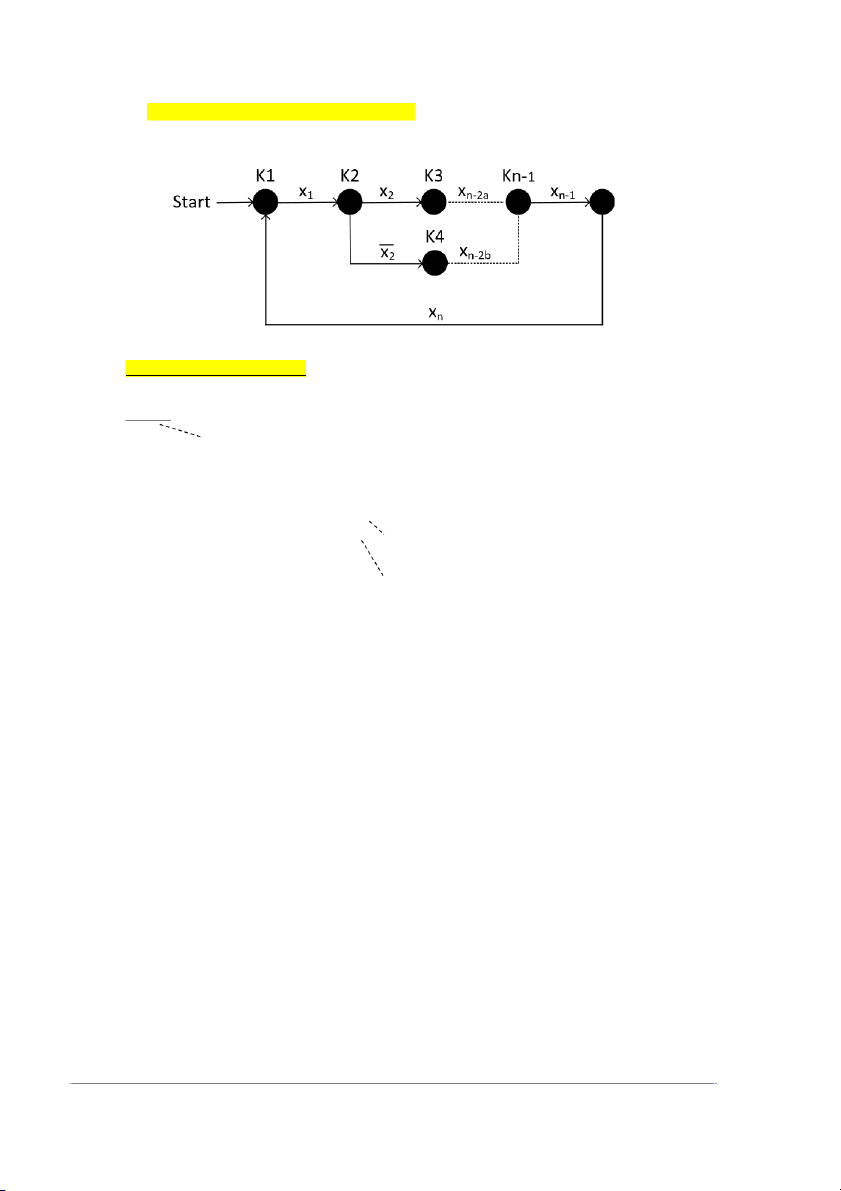
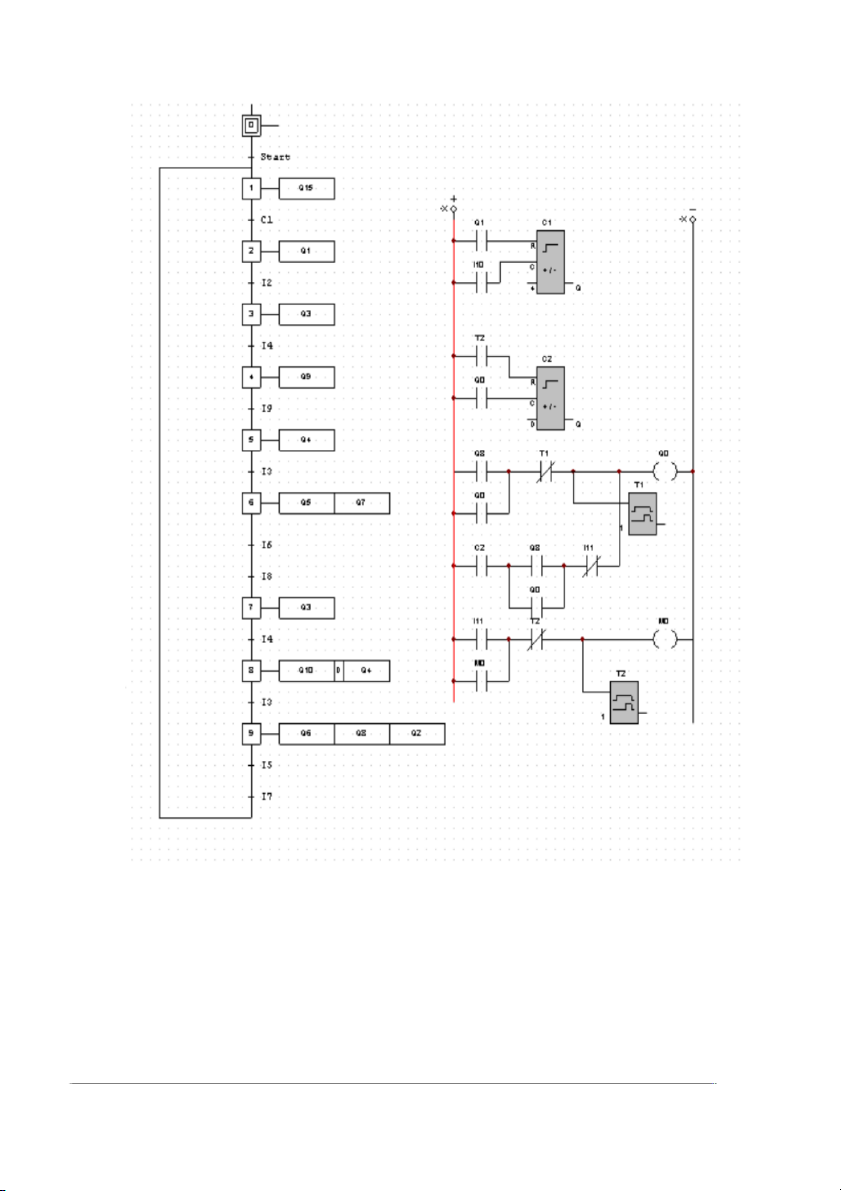
Counter ON 2 đếm 4 --- Băng tải ON --- 2.3. Lưu đồ Grafcet
Hệ thống được xây dựng theo lưu đồ Grafcet như sau:
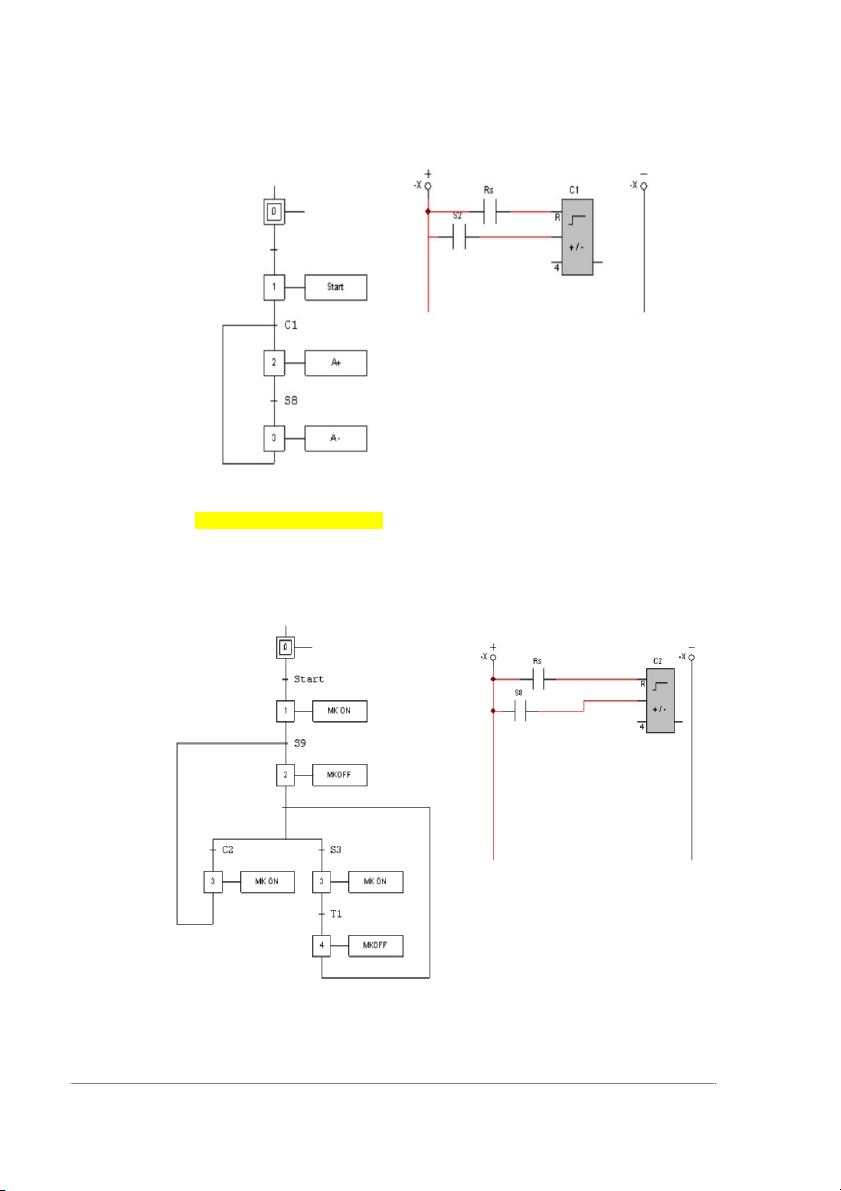
- Grafcet hệ thống cấp sản phẩm Giải thích lưu đồ:
C1: bộ đếm C1 hoạt động A+ : xy lanh A đi ra
S8: cảm biến S8 nhận tín hiệu A-: xy lanh A đi vào
- Grafcet Băng Tải Giải thích lưu đồ:
MK ON: băng tải hoạt động
MK OFF: băng tải ngưng hoạt động
S3: cảm biến S3 nhận tín hiệu
C2: bộ đếm C2 hoạt động
T1: bộ timer hoạt động(cài đặt ?? giây) ??????
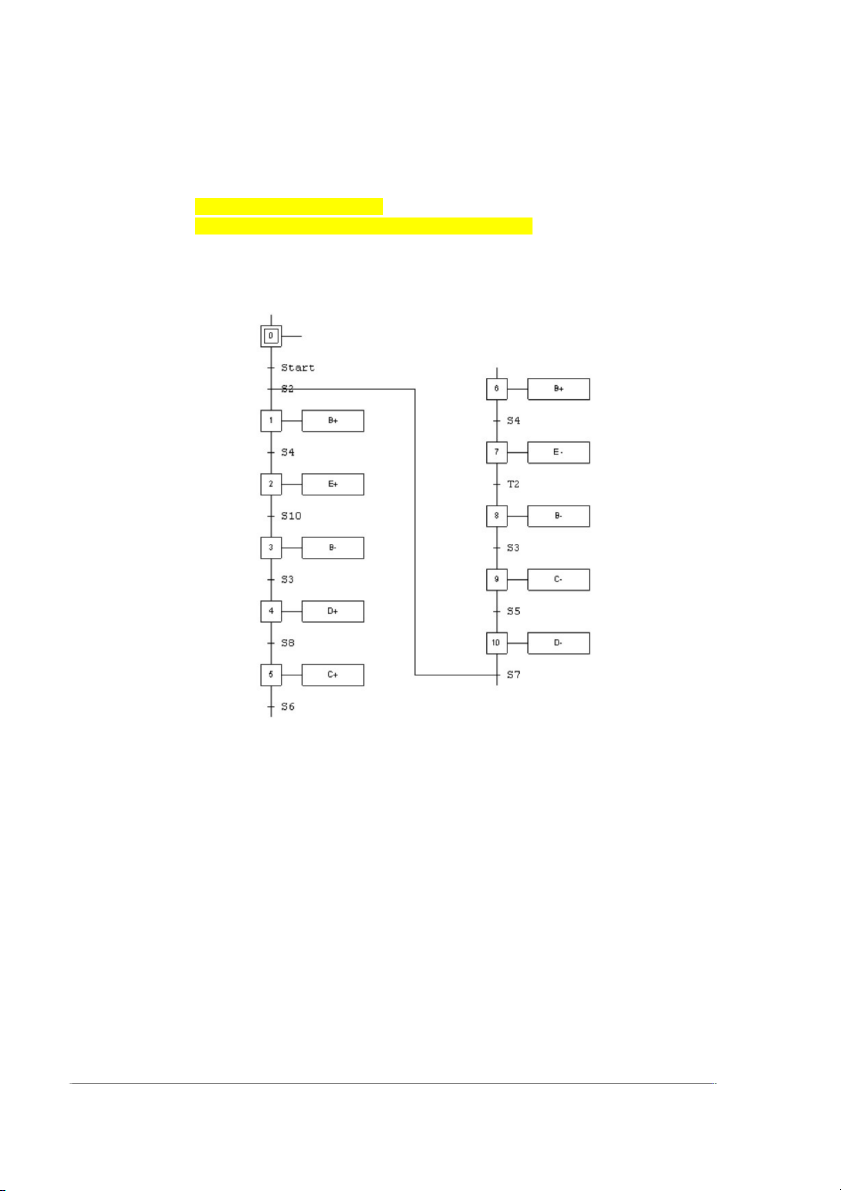
- Grafcet hệ thống sắp xếp sản phẩm Giải thích lưu đồ: B+: xylanh B đi ra
S10: cảm biến S10 nhận tín B-: xy lanh B đi vào hiệu E+: xylanh E đi ra
S3: cảm biến S3 nhận tín E-: xylanh E đi vào hiệu C+: xy lanh C đi ra
S8: cảm biến S8 nhận tín C-: xylanh C đi vào hiệu D+: xylanh D đi ra
S6: cảm biến S6 nhận tín D-: xylanh D đi vào hiệu
S2: cảm biến S2 nhận tín
S5: cảm biến S5 nhận tín hiệu hiệu
S4: cảm biến S4 nhận tín hiệu
- Ghi chú: 3 sơ đồ dùng chung nút start, được lập trình chung thành 1 file
nhưng tách ra làm 3 sơ đồ nhỏ, phóng to ra nhằm mục đích để nhìn dễ
giải thích. Lưu đồ Grafcet này mô tả quá trình hoạt động của hệ thống
đóng gói sản phẩm tự động, thứ tự của các xylanh, động cơ.Tuy nhiên,
lưu đồ trên sẽ chưa có hệ thống lập trình đèn báo lỗi, nút dừng hệ
thống, dừng khẩn cấp, bảo vệ thiếu pha, quá tải….. Có thể cải tiến thêm
1 số bước giúp hệ thống hoạt động mượt mà hơn, ổn định và tiết kiệm
được nhiều thời gian hơn.
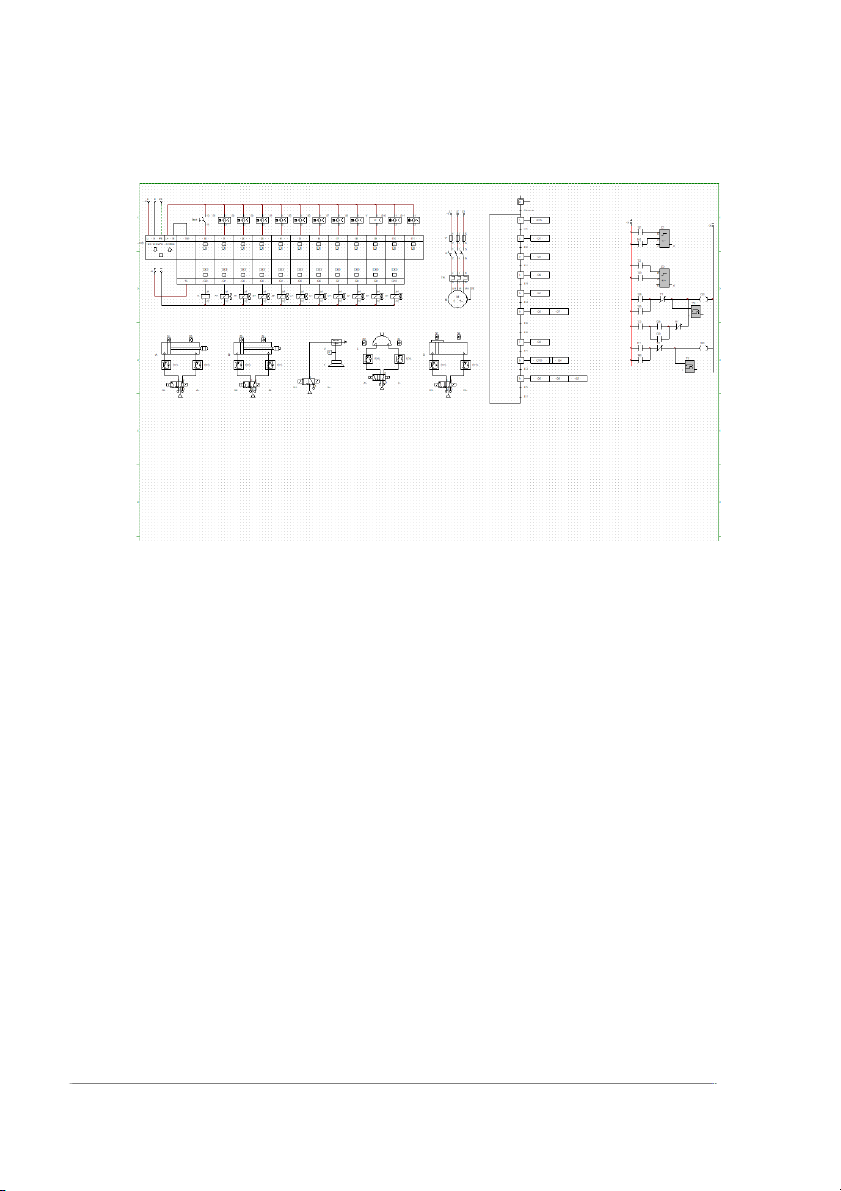
3. HỆ THỐNG ĐIỀU KHIỂN BẰNG PLC 3.1.
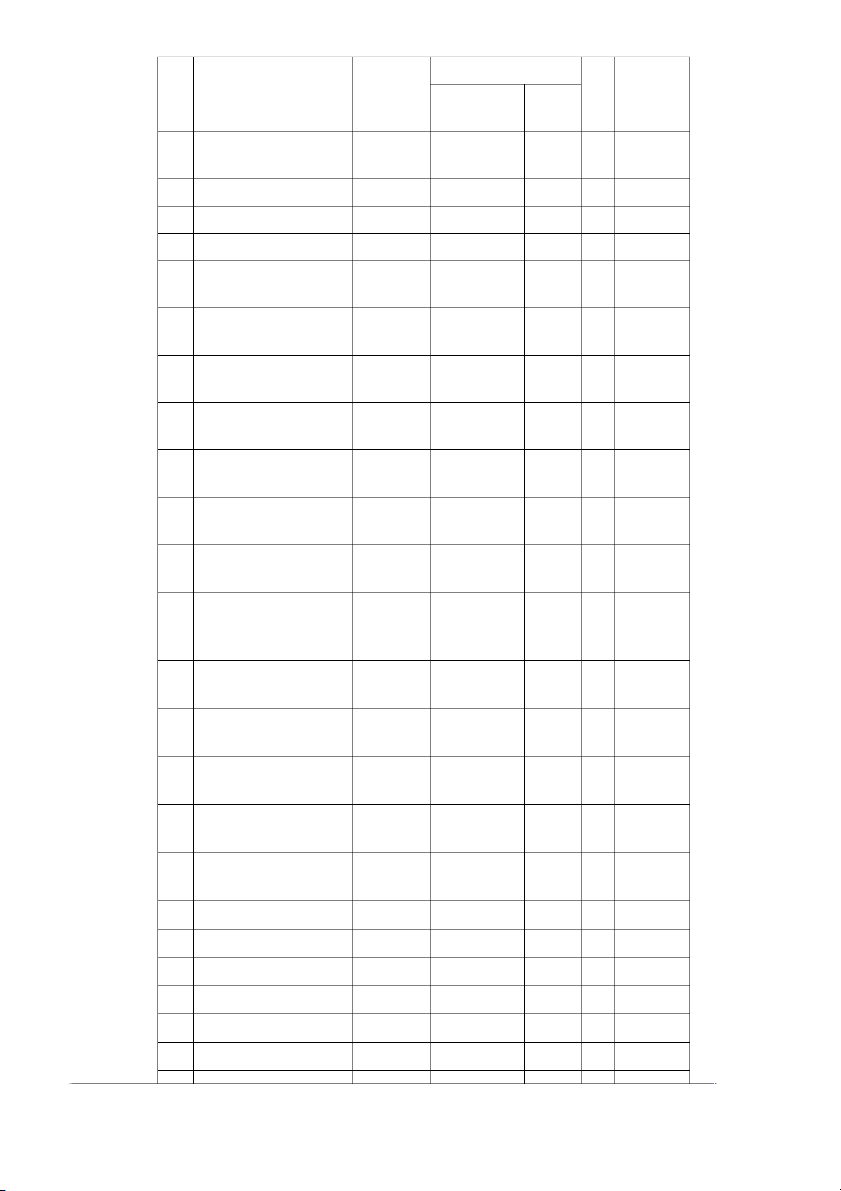
Bảng địa chỉ(kiểm lại đầu ra vào) Địa chỉ ST Thiết bị / Mô tả Ký hiệu Đầu vào Đầu SL Ghi chú T ra 1 Mô tơ băng truyền MK(11) 01 Hình 2 (ba pha) 2 Contactor 220V Q0 Hình 3 3 Cầu chì Hình 5 4 Relay nhiệt Hình 14 5 Xylanh (6) A Q1,Q 01 Hình 2 Xylanh(2) B Q3,Q 01 Hình 6 4 7 Xylanh xoay (3) C Q5,Q 01 Hình 6 6 8 Xylanh trượt (1) D Q7,Q 01 Hình 8 8 9 Xylanh khí nén (4) E Q9,Q 01 Hình 7 10 10 Cảm biến hành S1 I1 01 Hình 9 trình xylanh 11 Cảm biến hành S2 I2 01 Hình 9 trình xy lanh 12 Cảm biến hành S3 I3 01 Hình 9 trình xylanh 13 Cảm biến hành S4 I4 01 Hình 9 trình xylanh 14 Cảm biến hành S5 I5 01 Hình 9 trình xylanh 15 Cảm biến hành S6 I6 01 Hình 9 trình xylanh 16 Cảm biến hành S7 I7 01 Hình 9 trình xylanh 17 Cảm biến hành S8 I8 01 Hình 9 trình xylanh 18 Cảm biến áp suất S9 I9 01 Hình 10 19 Cảm biến quang S10 I10 01 Hình 11 20 Cảm biến quang S11 I11 01 Hình 11 12 Nút ấn hành trình Hình 4 13 Van khí nén Hình 12 14 Giác hút Hình 13 15 Băng truyền Hình 1 3.2.
Danh sách bảng vẽ (file zip trên zalo, làm theo rồi dán vào 5 cái+1 tổng quát)
- Tổng quan bảng vẽ điều khiển -Bản vẽ input -Bản vẽ output
-Bản vẽ mạch động lực động cơ
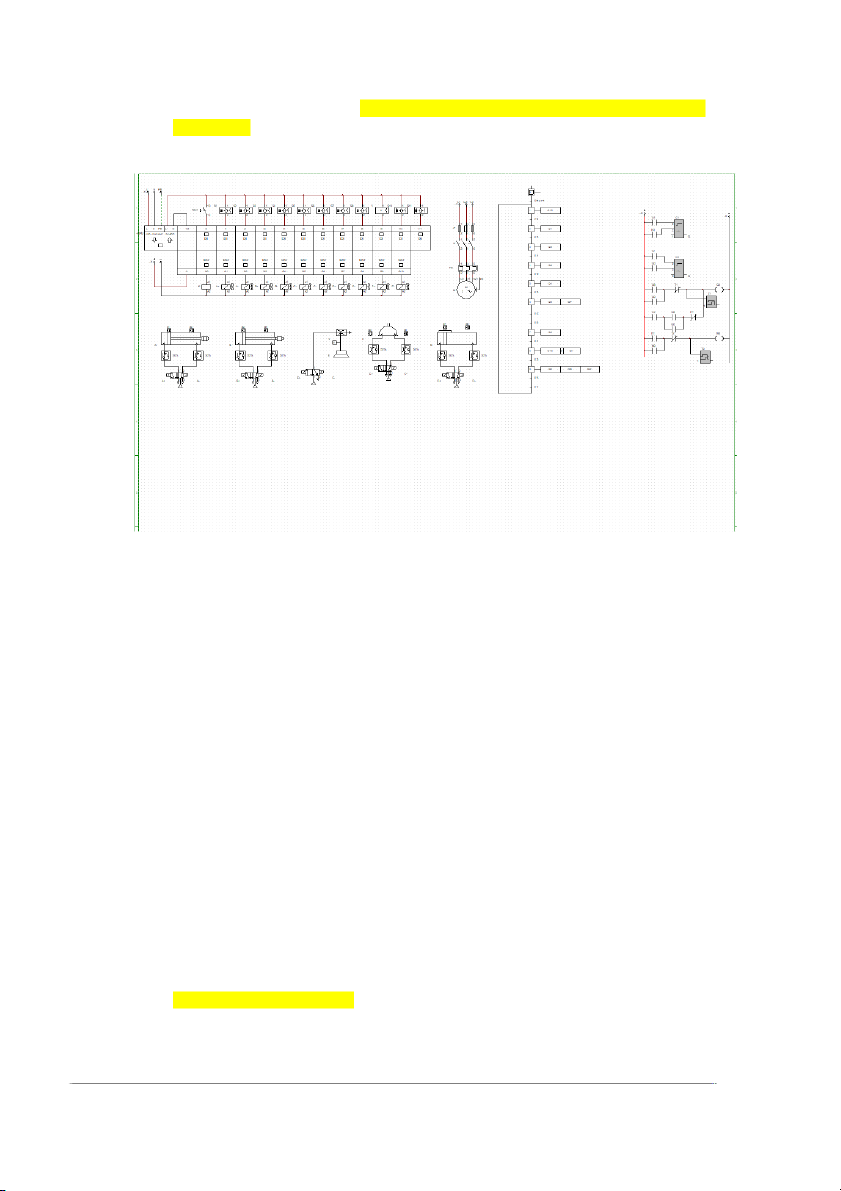
-Bản vẽ mạch động lực khí nén 3.3.
Chương trình điều khiển
(Cắt hình ảnh từ file pdf) 3.4. Phụ lục (file drive)
- Link file chương trình mô phỏng:
https://drive.google.com/drive/folders/1XEN9pIzdV8wzXS7pR8QXsgNMH mRTFdwM?usp=sharing
- Giải thích thêm (nếu có) 4. KẾT LUẬN
Sau thời gian tiến hành nghiên cứu, thu thập tài liệu, thiết kế hệ thống điều
khiển cho mô hình “Hệ thống đóng gói tự động (Packing)”, nhóm chúng em đã
đạt được những nội dung sau:
Giới thiệu khái quát về hệ thống đóng gói tự động
Phác thảo được tổng quan hệ thống Packing
Nêu lên được ứng dụng của hệ thống
Biết được cơ cấu của hệ thống đóng gói tự động
Hiểu thêm về nguyên lí làm việc của hệ thống
Liệt kê các trang thiết bị được sử dụng trong hệ thống
Vẽ và xây dựng giải thuật
Nêu lên được yêu cầu vận hành của hệ thống và giải thích
Vẽ được lưu đồ Grafcet của hệ thống cấp sản phẩm, băng tải và sắp xếp
sản phẩm và ghi chú, giải thích rõ ràng
Xây dựng được bảng địa chỉ của hệ thống điều khiển PLC (Packing)
Vẽ sơ đồ chương trình điều khiển của hệ thống
Viết được chương trình mô phỏng của hệ thống
Gắn các link, file pdf sau khi vẽ các lưu đồ, chương trình điều khiển, mô phỏng…
Tài liệu liên quan:
-

CODE CIMCO tiện và phay ( ảnh và code ))
7 4 -
Sổ tay Công nghệ chế tạo máy Tập 1 | Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
52 26 -

Đề thi cuối học kỳ 1 năm học 2020-2021 môn Vật liệu học | Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
52 26 -

Đề thi HK1Công nghệ chế tạo máy năm 2024 - 2025 | Trường Đại học Sư phạm kỹ thuật, thành phố Hồ Chí Minh
39 20 -

Đáp án môn cơ sở công nghệ chế tạo máy
20 10