Lý thuyết bài giảng môn Kỹ thuật cảm biến và đo lường nội dung chương 13: Đo mức
Lý thuyết bài giảng môn Kỹ thuật cảm biến và đo lường nội dung chương 13: Đo mức của Đại học Xây dựng Hà Nội với những kiến thức và thông tin bổ ích giúp sinh viên tham khảo, ôn luyện và phục vụ nhu cầu học tập của mình cụ thể là có định hướng ôn tập, nắm vững kiến thức môn học và làm bài tốt trong những bài kiểm tra, bài tiểu luận, bài tập kết thúc học phần, từ đó học tập tốt và có kết quả cao cũng như có thể vận dụng tốt những kiến thức mình đã học vào thực tiễn cuộc sống. Mời bạn đọc đón xem!
Môn: Kỹ thuật cảm biến và đo lường 14 tài liệu
Trường: Trường Đại học Xây Dựng Hà Nội 540 tài liệu
Tác giả:













Preview text:
lOMoARcPSD| 38777299
CHƯƠNG 13.- ĐO MỨC
13.1.- Khái niệm chung.
Mức là chiều cao iền ầy các chất lỏng hay các hạt trong các thiết bị công
nghiệp (như : bình chứa, bồn, tháp). Phép o mức có thể nhận ược thông tin về khối
lượng chất lỏng chứa trong các bể chứa.
Vật liệu chứa trong các thiết bị công nghiệp có bốn loại : chất rắn, chất lỏng, chất sệt, mặt cách ly.
Phương pháp o mức chất lỏng : có nhiều phương pháp o mức như : thổi bọt
khí, chênh áp, o lực căng, phao nổi, công tắc khoang hở, loadcell, ộ dẫn iện, hạt
nhân, rada, RF Admitance, siêu âm, sóng viba ...
Kiểu o : o liên tục và o iểm.
Những tác nhân của quá trình o lường ảnh hưởng ến ộ chính xác : áp suất,
nhiệt ộ, cánh khuâý, chất ăn mòn, bọt nổi, môi trường nguy hiểm và mức ộ ộc hại của hóa chất.
Những tác nhân ảnh hưởng khi thay ổi về vật liệu : tỷ trọng, thành phần hóa
học, vật liệu bám dính, ặc tính về iện....
Đơn vị o mức là ơn vị chiều dài. Đo mức ược phân thành :
- Đo mức môi trường làm việc, - Đo khối lượng chất lỏng.
- Truyền tín hiệu mức của môi trường làm việc.
Theo phạm vị o chia thành :
- Phạm vi o rộng (giới hạn từ 0,5 ÷ 20 m),
- Phạm vi o hẹp (giới hạn từ 0 ÷ ± 100 mm) hoặc 0 ÷ 450 mm dùng trong
hệ thống iều chỉnh tự ộng.
Hiện nay phép o mức ược sử dụng nhiều trong các lĩnh vực công nghiệp với
những nguyên lý hoạt ộng khác nhau, không có kỹ thuật nào là hoàn hảo cho mọi
ứng dụng, nhưng phổ biến nhất là phép o mức bằng cột nước thủy tĩnh và các chuyển
ổi iện. Dưới ây là các phương pháp o : 1.
Thổi bọt khí : rẻ, ơn giản, dễ lắp, hiển thị mức liên tục, chỉ o ược chất lỏng. 2.
Độ dẫn iện : rẻ, ơn giản hơn loại trên, không có bộ phận di chuyển o
iểm, dùng cho chất lỏng dẫn iện, dễ bị ảnh hưởng bởi lớp vật liệu bám dính trên iện cực. 3.
Phao : Phương pháp này không giới hạn về mức cao của bồn, ộ chính
xác không cao, chi phí ầu tư thấp nếu không có phần hiển thị từ xa, giới hạn về mức
áp suất làm việc.Cho kết quả o liên tục và o iểm. Khi o iểm có thể o ược cả mặt cách
ly. Đối với chất lỏng sệt và hột là không phù hợp, cánh khuấy cũng ảnh hưởng ến ộ chính xác. lOMoARcPSD| 38777299 4.
Chênh áp : thông dụng, o liên tục, giá hợp lý, dễ lắp ặt nhưng thị phần
ngày càng giảm. Dễ bị ảnh hưởng bởi tỷ trọng của vật liệu, không phù hợp khi o
các chất lỏng ở dạng hột, khoảng o nhỏ rất khó sử dụng, ặc biệt lưu ý ến sự ăn mòn của hóa chất. 5.
Displacer : o mức liên tục mặt cách ly, giới hạn mức di chuyển, rất ít
các phần từ dao ộng. Khi tỷ trọng thay ổi phải hiệu chuẩn lại. Khi bị bám dính phải
bù ầu vào, không tốt trong ứng dụng o mức có cánh khuấy. Khi dải o tăng lên thì
chi phí ầu tư cũng tăng lên áng kể. 6.
Công tắc khoảng hở : cấu trúc ơn giản, dễ lắp, chống ược sự ảnh
hưởng của bọt khí. chỉ dùng phát hiện mức dạng iểm, giới hạn về mức nhiệt ộ. 7.
Loadcell : Đo khối lượng, tiện dụng cho hầu hết các vật liệu chứa trên
silo dễ anh hưởng bởi á, băng tuyết cũng như sức gió. 8.
RF admittance : kỹ thuật mới cho việc o iểm cũng như liên tuc, dải áp
suất nhiệt ộ làm việc rộng, o ược mọi chất liệu. Khi hằng số iện môi của vật liệu
thay ổi dẫn ến việc thay ổi cảm biến và bộ truyền phù hợp. Không bị ảnh hưởng bởi
sự bám dính trên cảm biến. 9.
Hạt nhân : Đo không tiếp xúc, lắp bên ngoài bồn cần o mức. Phù hợp
với môi trường nhiệt ộ áp suất cao, vật liệu ăn mòn. Giá cực cao, khi sử dụng phải
có giấy phép sử dụng, chứng nhận và kiểm tra. Khả năng rò rỉ phóng xạ cũng là iều
người sử dụng rất e ngại. 10.
Siêu âm : Kỹ thuật o liên tục không tiếp xúc, không có phần tử di
chuyển. Nhạy cảm về vị trí hơn các kỹ thuật khác. Ảnh hưởng bởi hơi nước, bọt khí,
dải nhiêt ộ và áp suất làm việc không cao cũng như cấu trúc bên trong bồn bể. Không
thể hoạt ộng trong môi trường chân không. 11.
Radar : Đo mức liên tục với ộ chính xác cao, bỏ qua hơi nước. Điều
kiện làm việc giới hạn bởi dải áp suất làm việc thấp. Có thể o ược mức mặt cách ly
13.2.- Các Phương pháp o mức và nguyên lý làm việc.
Ngày nay nhu cầu về những hệ thống tự ộng hóa xử lý tinh vi, sự nghiêm
ngặt của những quy chuẩn trong iều khiển quá trình, và những yêu cầu ngày càng
khắt khe trong môi trường o mức khiến kỹ sư hệ thống kỹ thuất trong công trình
phải i tìm những hệ thống o mức tin cậy hơn, chính xác hơn. Kết quả o chính xác
cao hơn làm giảm thiểu những khả năng sai lệch trong quá trình xử lý hóa chất (hóa
chất ở dạng lỏng), nâng cao chất lượng của sản phẩm ầu ra, giảm chi phí và lãng phí.
13.2.1.- Phương pháp o mức bằng quan sát.
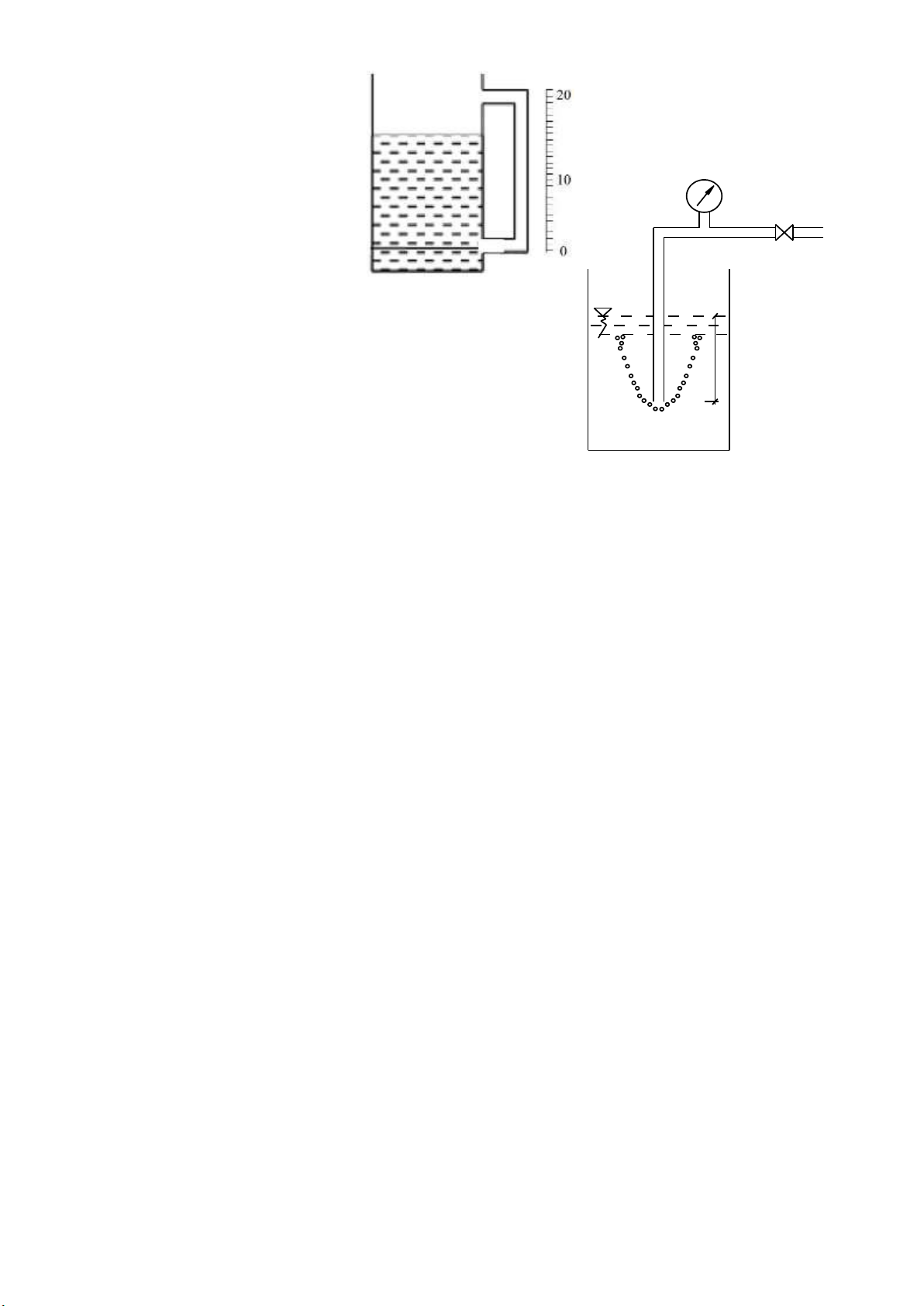
Giả sử có một bình chứa dịch thể cần phải xác ịnh mức dịch trong ó. Muốn
vậy, ta lắp thêm một ống thủy tinh và có khắc vạch chia (hình 13.1).
Như vậy, chỉ cần quan sát ống thủy tinh là có thể biết ược mức dịch trong bình. lOMoARcPSD| 38777299 Hình
13.1.- Nguyên lý o mức bằng quan sát. 13.2.2.- Đo áp lực
thông qua việc o áp lực dòng khí nén : hình 13.2. H
Hình 13.2.- Đo mức dịch thông qua việc o áp lực dòng khí nén.
Nếu cho một dòng khí nén i vào trong bình chứa dịch thể mà trong bình ó xuất
hiện các bọt khí. Lúc này áp suất o bằng áp kế trên ường ống dẫn khí nén bằng áp
suất cột dịch tính từ miệng ống.
Hiện nay khi o mức chất lưu bằng phương pháp này thường sử dụng cảm biến
báo mức kiểu bong bóng thay thế cho áp kế. Cảm biến này có một ống dẫn khí xuống
cuối áy bình nhằm tạo bong bóng. Khi khí ược dẫn vào khiến áp suất trong ống sẽ
tăng lên cho ến khi thắng ược áp lực của cột chất lỏng. Từ ó, sẽ o ược áp suất mức
chất lỏng trong bình chứa.
13.2.3.- Đo mức dựa trên ộ dẫn iện của chất lưu.
1.- Phương pháp o ộ dẫn iện bằng dòng iện cảm ứng (không iện cực).
Đo ộ dẫn iện thường phải thực hiện trong các dung dịch nên có thể bị bao bọc,
óng bám hoặc phủ lên bề mặt của các iện cực o truyền thống (loại tiếp xúc). Khi o,
dung dịch phải có ộ dẫn cao trên 10,000 microSiemens/cm với iện cực truyền thống
thì cần phải sử dụng loại có hằng số K (cell constant) lớn. Những iện cực này có bề
mặt diện tích iện cực nhỏ và do ó dẫn tới việc dễ bị óng bám và phân cực làm cho
việc o ạc không còn chính xác. Để giải quyết nhược iểm này, các ầu o bằng kỹ thuật
cảm ứng từ ã ược phát triển ể khắc phục các vấn ề này.
+ Nguyên tắc hoạt ộng :
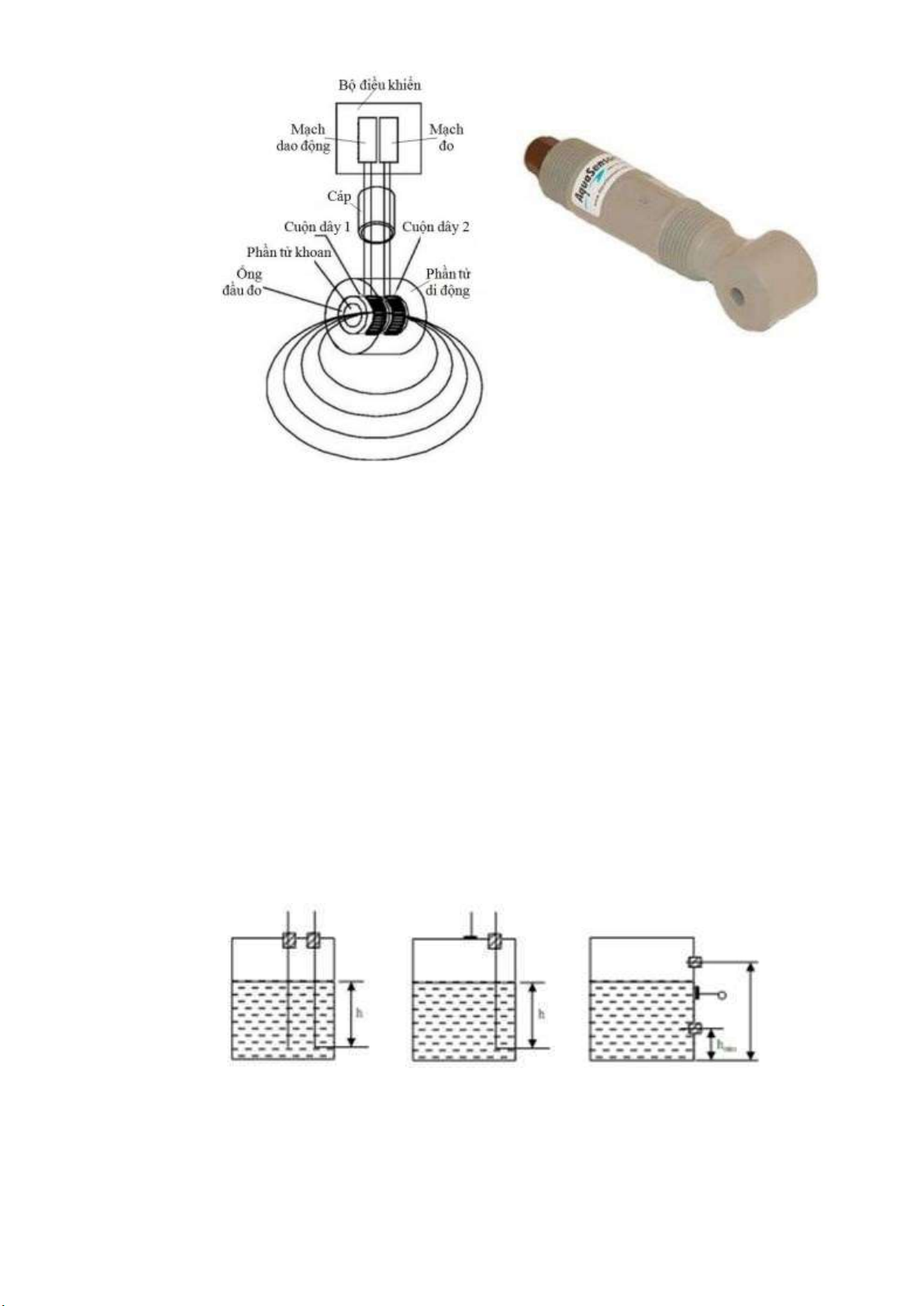
Các ầu o ộ dẫn cảm ứng hoạt ộng dựa vào cảm ứng một dòng iện trong vòng
lặp khép kín của dung dịch và o ộ lớn của dòng iện này ể xác ịnh ộ dẫn iện của dung
dịch ó. Trong hình 13.3, bộ iều khiển truyền tín hiệu nối với hai lõi dây 1 và 2. Lõi
1 cảm ứng dòng iện sinh ra trong dung dịch và ược o lại. Tín hiệu AC trong vòng
lặp xuyên qua trục ống ầu o với dung dịch bao xung quanh. Lõi 2 (tiếp nhận) dò ộ
lớn của dòng cảm ứng và ược o bởi các bộ phân tích iện tử ể hiển thị giá trị ọc tương ứng. lOMoARcPSD| 38777299
Hình 13.3.- Hoạt ộng của ầu do ộ dẫn iện cảm ứng.
Loại ầu do cảm ứng từ này loại trừ ược các vấn ề hay gặp phải khi sử dụng
với iện cực o truyền thống, kiểu iện cực sử dụng iện cực bằng than chì hay kim loại
ể o tiếp xúc với dung dịch. Lớp dầu mỡ, lớp phủ do nước quy trình hay óng mạ bằng
ộ dẫn iện hóa sẽ không còn là mối bận tâm khi sử dụng loại ầu o dòng iện cảm ứng này.
2.- Đo mức chất lưu bằng cảm biến o mức dạng iện cực tiếp xúc.
Tất cả các dung dịch có chứa nước thì luôn có ộ dẫn iện trong một chừng
mực nào ó. Việc o ạc khả năng của một dung dịch có thể dẫn iện ược gọi là ộ dẫn
(nghịch ảo của iện trở). Sự bổ sung các chất dẫn iện như muối, axit hay baz vào
nước tinh khiết sẽ làm tăng khả năng dẫn iện của chất lỏng. Điều này làm tăng khả
năng ộ dẫn iện của dung dịch (giảm ộ iện trở).
Cảm biến dùng o mức chất lưu có tính dẫn iện (dộ dẫn iện ~ 50μScm-1) trên
hình 13.4 có các dạng sau : a) b) c)
Hình 13.4.- Sơ ồ bố trí cảm biến ộ dẫn.
Sơ ồ cảm biến ộ dẫn hình 13.4.a gồm hai iện cực hình trụ nhúng trong chất
lỏng dẫn iện. Trong chế ộ liên tục, các iện cực ược nối với nguồn nuôi xoay chiều ~
10V ( ể tránh hiện tượng phân cực của các iện cực). Dòng iện chạy qua các iện cực
có biên ộ tỷ lệ với chiều dài phần iện cực nhúng chìm trong chất lỏng. lOMoARcPSD| 38777299
Sơ ồ cảm biến ộ dẫn hình 13.4.b chỉ sử dụng một iện cực, iện cực thứ hai là
bình chứa bằng kim loại.
Sơ ồ cảm biến ộ dẫn hình 13.4.c dùng ể phát hiện ngưỡng, gồm hai iện cực
ngắn ặt theo phương ngang, iện cực còn lại nối với thành bình kim loại. Vị trí các
iện cực gắn tương ứng với một mức ngưỡng. Khi mức chất lỏng ạt tới iện cực, dòng
iện trong mạch thay ổi mạnh về biên ộ.
Một bộ thiết bị ể o ạc ộ dẫn iện của dung dịch thông qua một bộ phân tích kết
nối bên trong với dây cáp tới ầu o ược nhúng ngập trong dung dịch. Đầu o ược thiết
kế tích hợp với một cảm biến nhiệt ộ và hai iện cực tiếp xúc với dung dịch. Dây
vòng quanh bộ phân tích ưọc áp một iện thế vào giữa hai bản iện cực và ộ lớn của
dòng iện sinh ra tương quan tính tuyến với ộ dẫn iện của dung dịch.
Khi nhiệt ộ của dung dịch thay ổi, ộ dẫn của nó cũng thay ổi. Thông thường,
sự thay ổi nhiệt ộ ược bù trừ bởi một nhiệt kế (cái iện trở nhạy nhiệt ộ) gắn trong
cảm biến o ộ dẫn ể sửa ổi hệ số góc ường tương quan từ o ạc có ược. Không quan
tâm ến nhiệt ộ thực của dung dịch, giá trị hiển thị là giá trị của ộ dẫn iện của dung
dịch nếu ở nhiệt ộ là 25oC (nhiệt ộ tham khảo ược chấp nhận quốc tế). Sự bù trừ
nhiệt ộ này có thể thực hiện tự ộng hoặc thay ổi bằng tay.
Tất cả các dung dịch không có cùng sự thay ổi ộ dẫn theo nhiệt ộ. Ví dụ, ối
với HCl thì thay ổi 1.5% trên mỗi oC, NaCl thì 2.1% mỗi °C. Tỉ lệ thay ổi ộ dẫn iện
theo thay ổi nhiệt ộ ược tham chiếu như ộ dốc của ường bù trừ nhiệt ộ và ược diễn tả theo % trên °C.
Khi ặt một iện thế vào giữa hai iện cực của một cảm biến ộ dẫn iện thì các iện
tích âm ược di chuyển và khí ược sinh ra. Các iện tích âm di chuyển tạo ra dòng iện
chạy từ iện cực này sang iện cực kia. Khi các khí ược thải ra, chúng bám quanh iện
cực. Sự tích tụ này làm giảm sự tiếp xúc của iện cực với dung dịch và tạo ra một sức
iện ộng ngược lại. Ảnh hưởng này ược biết ến như là sự phân cực, cái mà có thể
tránh ược bằng cách ẩy một dòng iện xoay chiều (AC) chậm vào iện cực thay vì sử
dụng iện thế một chiều (DC). Chu kì của dòng iện xoay chiều ủ ngắn và iện thế ủ
thấp ể iện cực không bị các khí sinh ra bám quanh.
+ Cấu tạo của cảm biến o ộ dẫn iện :
Một cảm biến ộ dẫn thường bao gồm 2 iện cực ược cách ly với nhau. Vật liệu
iện cực thường làm bằng thép không rỉ 316, hợp kim titan-paladi hoặc cacbon. Theo
lý thuyết, bất kì vật liệu dẫn iện nào cũng có thể dùng làm iện cực nếu nó không bị
hòa tan trong dung dịch. Tuy nhiên, thực tế thì iều này không ược áp dụng. Các kết
quả không mong muốn có thể xảy ra khi dòng iện ược áp vào hai iện cực. Độ lớn
của iện thế và dòng iện có thể tạo một tác ộng lên tuổi thọ iện cực và ộ chính xác
của phép o. Không có vật liệu iện cực nào có thể áp ứng cho tất cả các ứng dụng. lOMoARcPSD| 38777299
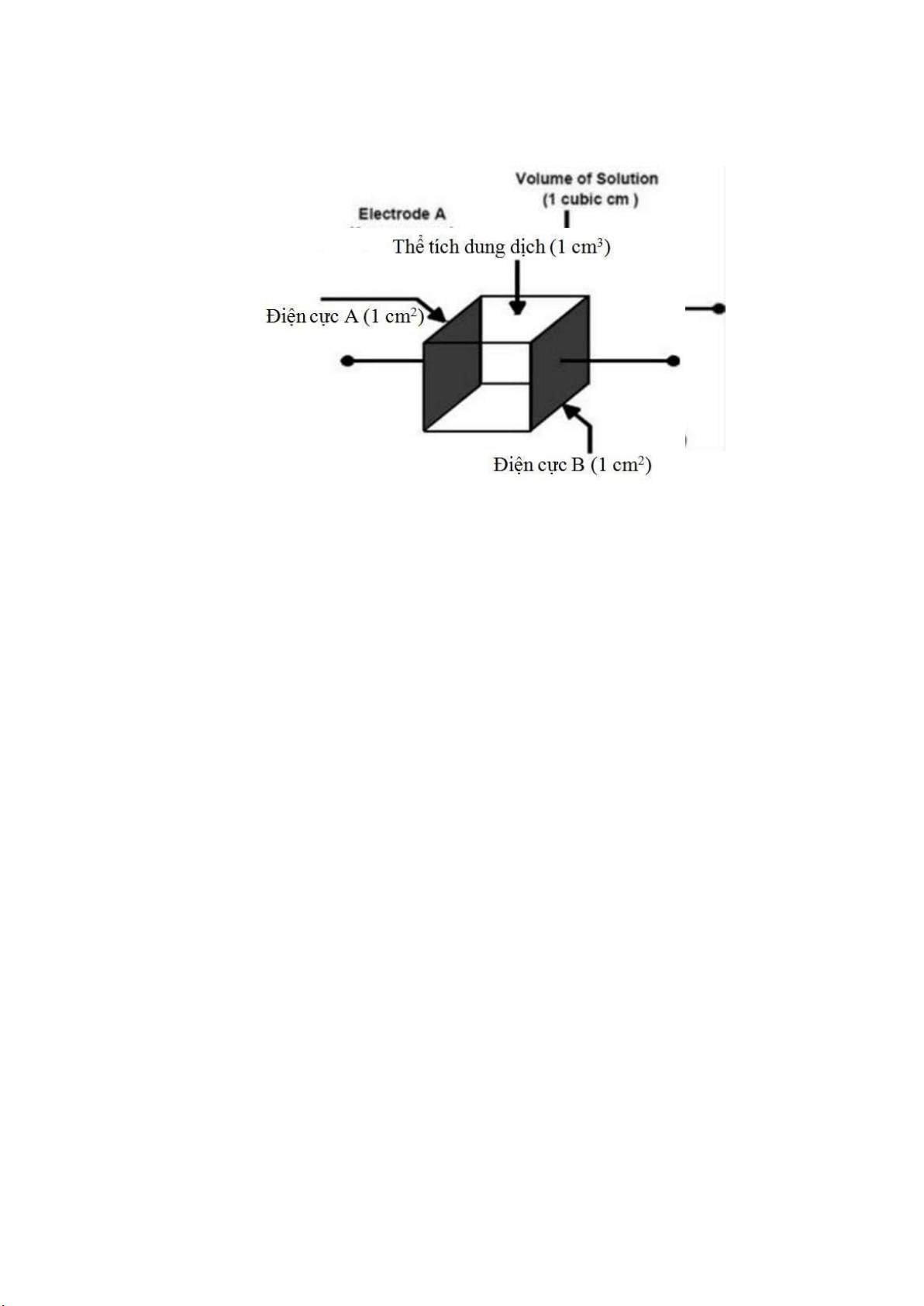
Các iện cực ược ịnh kích thước và khoảng trống tại một khoảng cách chính
xác ể cho một giá trị hằng số K, ược gọi là “hằng số tế bào”. Theo lý thuyết, hằng
số này là 1.0 ối với hai iện cực có diện tích bề mặt 1 cm vuông và ặt cách nhau 1 cm. Thể tích khoảng trống giữa hai iện cực là 1 cm khối. Hình 13.5 mô tả kích thước iện cực cơ bản.
Hình 13.5.- Kích thước lý thuyết của cảm biến có hằng số tế bào 1.0
Bởi vì thể tích của dung dịch o là diện tích của iện cực nhân với khoảng cách
giữa chúng, mối tương quan toán học không thay ổi nếu 1 ại lượng tăng và ại lượng
kia giảm theo tỷ lệ. Tuy nhiên, mức ộ biến ổi và dung sai trong khoảng trống tạo bởi
iện cực và diện tích có thể làm cho thể tích này bị thay ổi nhỏ.
Hằng số tế bào phải phù hợp với bộ phân tích ối với thang o ược biết trước.
Ví dụ, nếu cảm biến của ộ dẫn với hằng số tế bào là 1.0 ược dùng ể o nước tinh khiết
có ộ dẫn 1 microSiemen/cm, thì tế bào sẽ có ộ iện trở là 1,000,000 ohms. Ngược lại,
cùng cảm biến ó ược dùng cho nước biển có thể có ộ iện trở là 30 ohms. Bởi vì ộ
iện trở rất khác nhau, nên bộ phân tích rất khó ể o chính xác nếu chỉ dùng cảm biến
có cùng một hằng số tế bào. Trong dung dịch o có 1-microSiemen/cm tế bào phải
ược cấu tạo với khoảng trống giữa iện cực lớn nhưng khoảng cách giữa chúng nhỏ.
Với cấu tạo như thế sẽ cho phép tế bào có ộ iện trở xấp xỉ 10,000 ohms, ể o chính
xác hơn. Bằng cách sử dụng các cảm biến có hằng số tế bào khác nhau, thiết bị o ạc
có thể hoạt ộng ối với thang o của iện trở tế bào cho nước cực kì tinh khiết ến nước biển có ộ dẫn cao.
+ Bù trừ nhiệt ộ trong phép o ộ dẫn : lOMoARcPSD| 38777299
Hệ thống o ộ dẫn ạt sự chính xác chỉ khi ược bù trừ nhiệt ộ tốt. Bởi vì hệ số
chung của dung dịch từ khoảng 2-3% trên °C, cần phải cẩn thận trong sản xuất và
thiết kế các thiết bị có bù trừ nhiệt ộ tự ộng. Tương tự như thế, người vận hành phải
o nhiệt ộ chính xác khi cài ặt thiết bị với sự bù trừ nhiệt ộ bằng tay ể cho kết quả
chính xác. Hệ số nhiệt ộ dung dịch ôi khi không tuyến tính và luôn thay ổi theo ộ
dẫn thực tế. Việc hiệu chuẩn tại nhiệt ộ o thực tế sẽ giúp phép o ạt ộ chính xác tốt nhất.
Hầu hết các bộ phân tích ộ dẫn có khả năng iều chỉnh sự bù trừ nhiệt ộ bằng
tay. Người vận hành phải cài ặt bù trừ nhiệt ộ theo nhiệt ộ dung dịch tại thời iểm
thực hiện o ộ dẫn. Sự bù trừ nhiệt ộ bằng tay thích hợp với các ứng dụng o ạc có sự
thay ổi nhiệt ộ ít. Tuy nhiên, sự bù trừ tự ộng ược ưu tiên sử dụng hơn bởi vì sau khi
thiết bị hoạt ộng nó sẽ không thay ổi nếu với việc cài ặt sai do không ể ý hay thao tác thực hành kém.
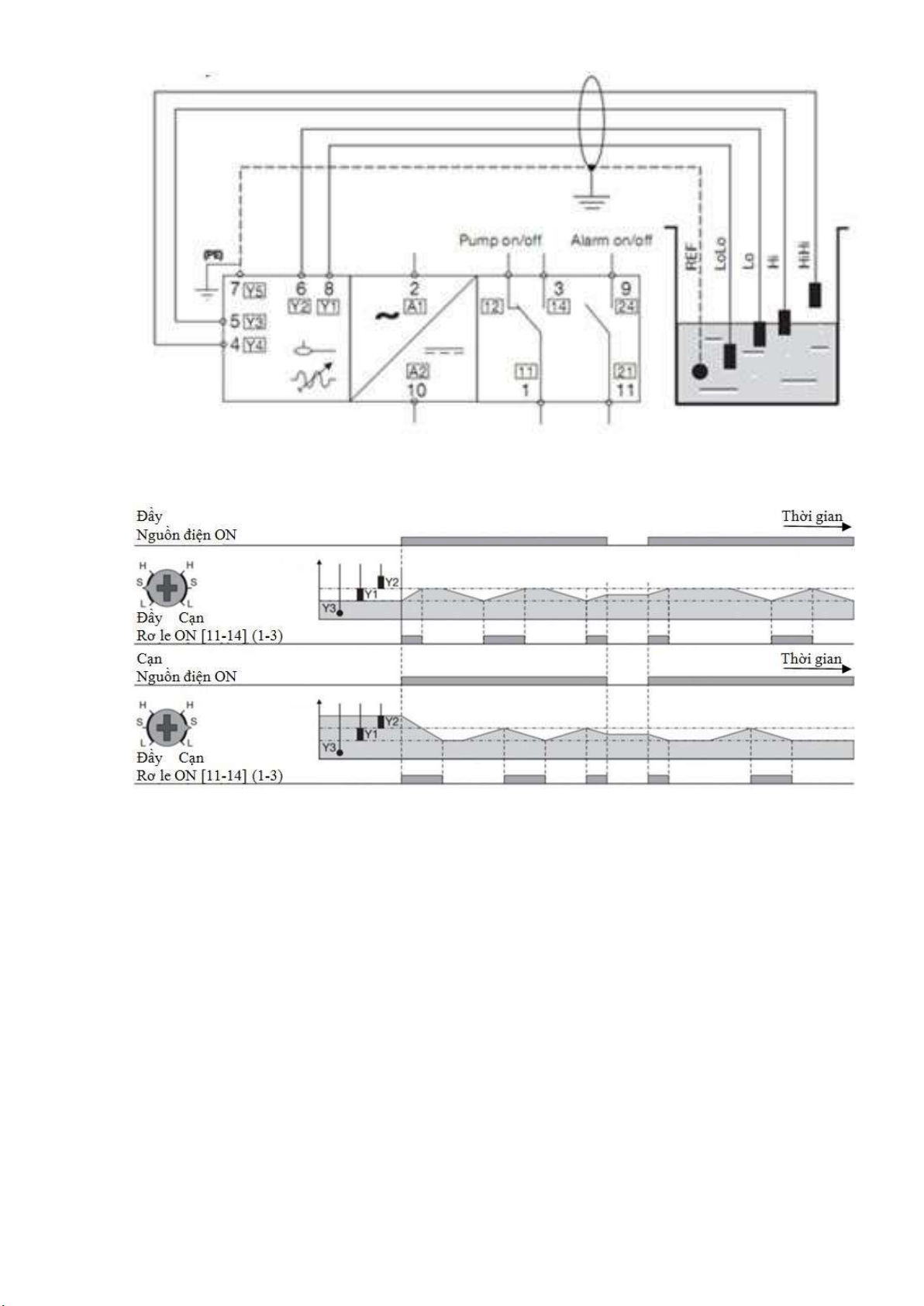
Việc sử dụng o mức chất lưu bằng cảm biến ộ dẫn dạng iện cực tiếp xúc còn
ược dùng iều khiển bơm nước cho các bể chứa. Lúc này sẽ sử dụng Thiết bị báo
mức chất lỏng dạng iện cực hoạt ộng bằng cách sử dụng các que iện cực ể o mức
trong các bể chứa, bồn chứa. a) b)
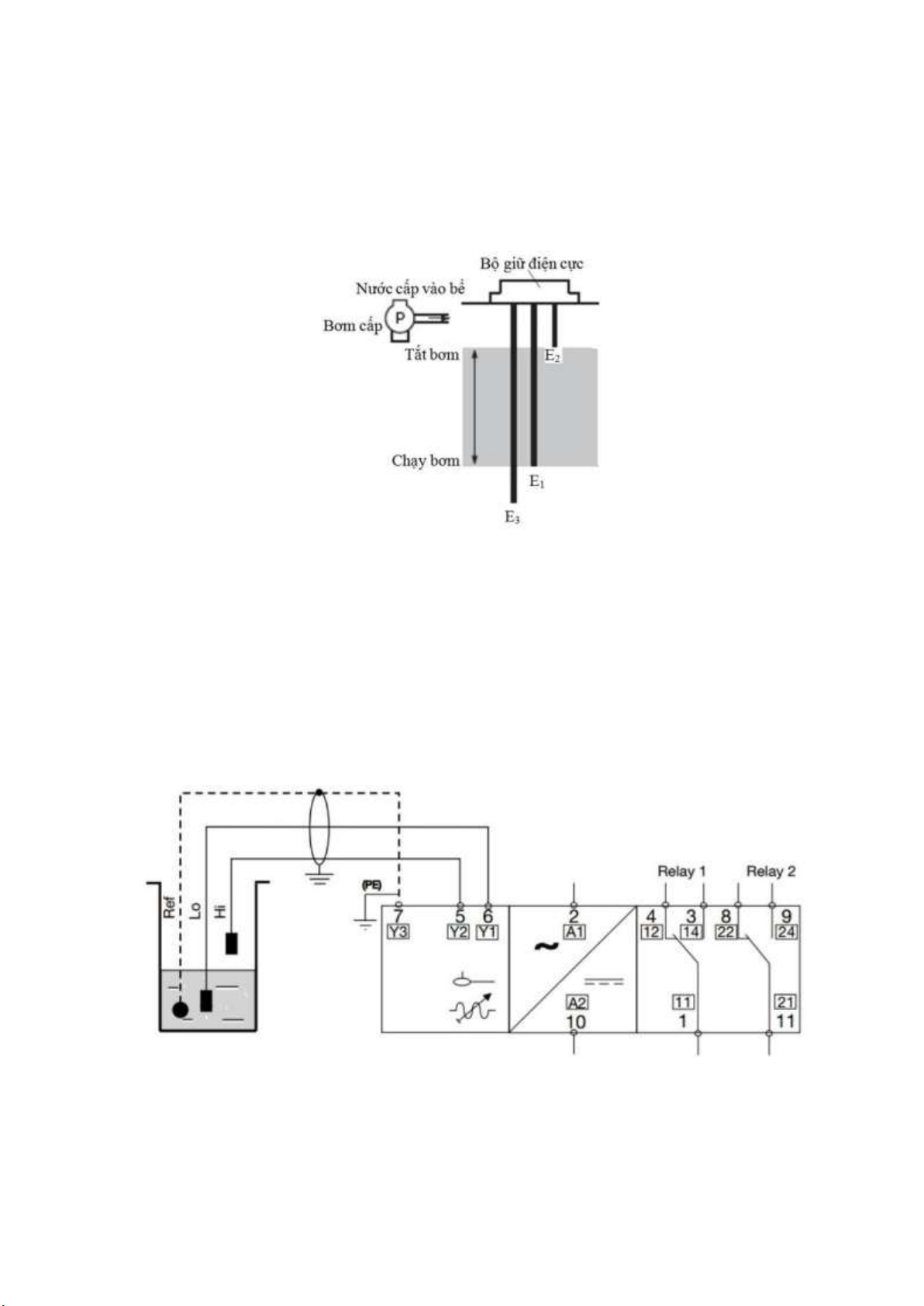
Hình 13.6.- Cảm biến o mức nước iện cực.
Thiết bị báo mức gồm :
- Bộ iều khiển loại 3 mức, loại 5 mức, thêm cảnh báo mức cao thấp (hình 13.6.a).
- Que iện cực vật liệu inox loại dài 1 m, inox loại 316.
- Bộ giữ iện cực loại 3 cực, loại 5 cực (hình 13.6.b). lOMoARcPSD| 38777299
Đa số cảm biến o mức nước ở dạng iện cực dùng iều khiển bơm nước vào
hoặc ra khỏi bể khi bể ầy hoặc cạn. Theo ó, cảm biến có các que iện cực có ộ dài
khác nhau và ược cắm vào trong bể chứa nước (hình 13.6). Chiều dài que khoảng 2
÷ 6m, que thứ 3 (E3) dài nhất và là que làm chuẩn cho 2 que còn lại, thực hiện việc
so sánh iện trở. Khi nước trong bể chứa cạn dần, tương ứng iện trở xuống mức iện
trở que thứ 1 (E1), khi ó sẽ dẫn tới sự chênh lệch iện trở giữa các que, ngay lúc ó,
cảm biến sẽ iều khiển bơm nước vào.
Hình 13.7.- Bố trí iện cực vào bể chứa.
Còn ngược lại, khi nước vào bể chứa tăng, dâng cao lên tới que iện trở 2 (E2),
bộ iều khiển tự ộng o iện trở giữa que 1 và que 2. Điện trở que 2 lớn hơn iện trở que
1, hệ thống báo tự ộng ế bộ cảm biến ra tín hiệu ngừng cấp nước.
Loại cảm biến này hoạt ộng dựa theo nguyên tắc so sánh iện trở giữa các que. Do
không có iện áp nên chúng có thể dùng ược cả trong môi trường cháy nổ.
+ Sơ ồ cấp - xả nước với bộ giữ iện cực loại 3 cực :
+ Sơ ồ cấp - xả nước với bộ giữ iện cực loại 5 cực :
Đây là loại cảm biến sử dụng các que iện cực cắm vào trong bể, dùng ể iều
khiển bơm nước vào bể (cạn thì bơm, ầy thì ngừng) hoặc bơm nước ra ( ầy thì
bơm, cạn thì ngừng). Ngoài ra còn có tính năng báo mức quá cao và quá thấp ối với loại 5 cực. lOMoARcPSD| 38777299
Sơ ồ các chế ộ iều khiển với bộ giữ iện cực loại 3 cực :
Đặc iểm của cảm biến báo mức dạng iện cực -
Cảm biến ược thiết kế nhằm o lưu lượng môi chất nước trong bình chứa
liên tục theo nguyên tắc của áp suất. -
Que iện cực ược làm bằng thép không rỉ kết hợp màng gốm nhằm ngăn
chặn sự tích tụ của chất rắn, ảm bảo ộ bền cao khi ngâm trong nước thời gian dài. -
Sai số chênh lệch áp suất ở tỉ lệ thấp nhất nhờ bộ báo mức phát hiện ra. -
Được trang bị 1 sợi cáp ặc biệt dùng ể kết nối các bộ cảm biến ứng với bề mặt. -
Màn hình hiển thị LED giúp cảm biến o chính xác và hiệu quả.
13.2.4.- Đo mức bằng phương pháp thủy tĩnh. 1.- Nguyên lý : lOMoARcPSD| 38777299
Dựa vào tính chất áp suất tĩnh của dịch thể, có nghĩa là trong một bình chứa
dịch thì áp suất tĩnh của dịch thể có ộ cao H và tỷ trọng ρ không ổi sẽ tỷ lệ bậc nhất
với cột dịch thể trên nó.
Như vậy, chỉ cần o áp suất tĩnh của cột dịch là biết ược lượng dịch.
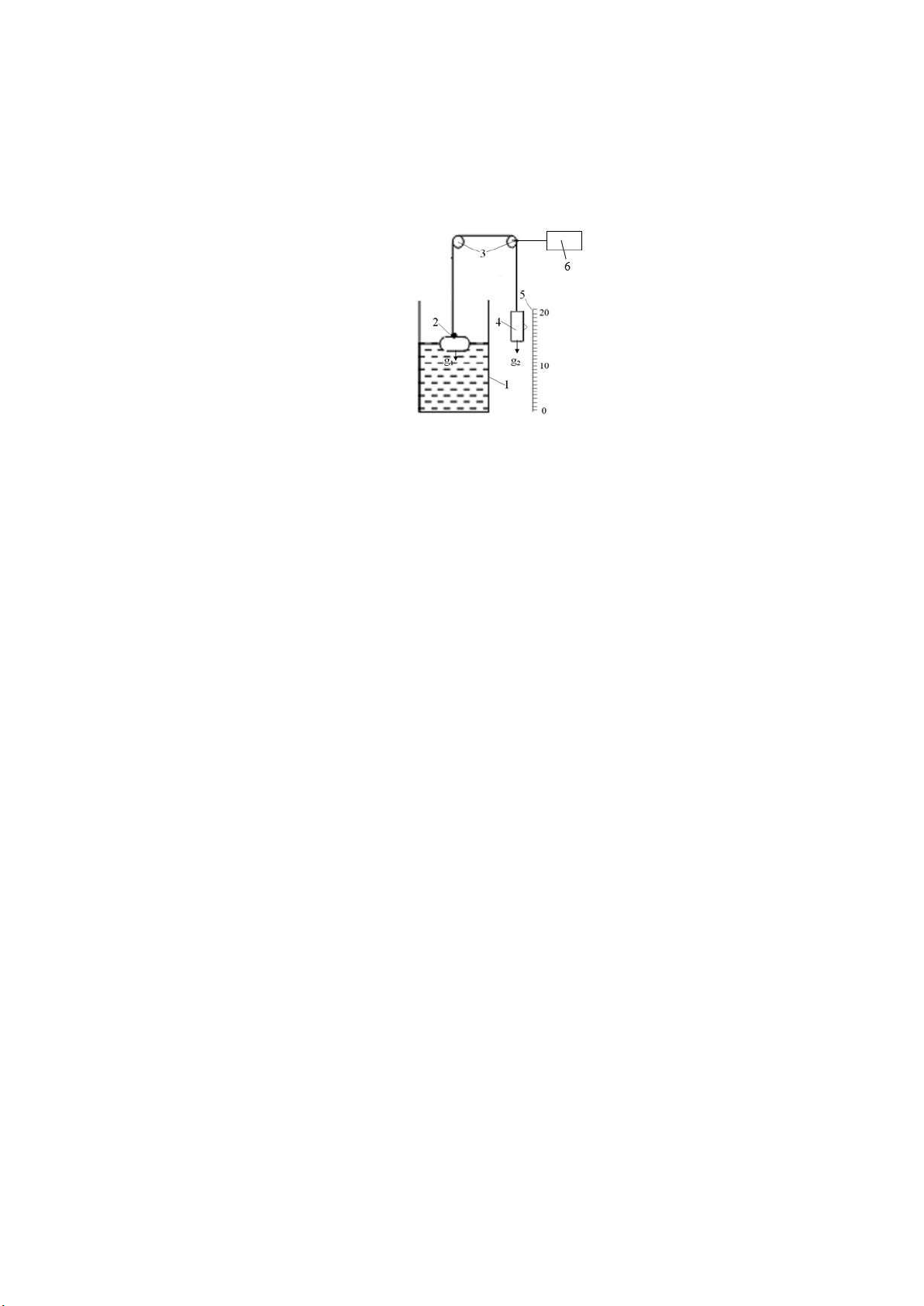
2.- Bằng phao cầu quan sát.
Hình 13.8.- Nguyên lý o mức bằng phao quan sát.
1.- Bể chứa dịch ; 2.- Phao cầu ; 3.- Ròng rọc ; 4.- Đối trọng ; 5.- Thang chia ; 6.- Cảm biến vị trí.
Giả sử có một bình chứa dịch, ta bố trí sơ ồ o như hình 13.8.
Phao 2 có nguyên lý làm việc rất ơn giản. Phao 2 là một vật nổi ặt trên mặt
chất lưu, do trọng lực của chất lưu và không khí phía trên tác ộng nên làm cho phao
2 thay ổi lên xuống theo sự thay ổi của bề mặt chất lưu. Phao 2 ược nối với ối trọng
4 bằng dây mềm, qua các ròng rọc 3. Khi mức chất lưu thay ổi, phao 2 ược nâng lên
hoặc hạ xuống làm quay ròng rọc 3, cảm biến vị trí 6 ược gắn với trục quay của ròng
rọc sẽ cho tín hiệu tỷ lệ với mức chất lưu. Hoặc khi mức chất lưu thay ổi sẽ làm cho
phao 2 thay ổi nên ối trọng 4 cũng thay ổi vị trí ồng thời với phao 2. Như vậy, chỉ
cần ối trọng 4 (dạng có kim chỉ) nằm ở vị trí cân bằng là biết ược mức dịch trên thang chia 5.
Điều kiện ể hệ thống cân bằng là : g1 - F = g2
Thực tế, ảnh hưởng của ma sát ròng rọc làm cho kết quả o không chính xác.
Vì thế, nếu ma sát càng nhỏ thì kết quả càng chính xác.
3.- Bằng bộ biến ổi tỷ lệ truyền dẫn.
Giả sử có một bình chứa dịch, ta bố trí sơ ồ o như hình 13.9.
Phao nổi 1 phản ánh mức dịch cần o, ược nối với sợi dây 2 và gắn vào puly 3.
Khi puly quay quanh trục quay 4 có gắn con trượt 5. Khi con trượt quay nó trượt
trên biến trở 6. Đầu dây ra của biến trở ược mắc với mạch o. lOMoARcPSD| 38777299
Khi thiết kế, ường kính của puly ược tính sao cho chu vi của nó có ộ dài bằng úng khoảng cách cần o.
Để giữ cho dây treo phao luôn ược căng, gắn thêm lò xo xoắn 7 và cơ cấu cam
8 ể puly chỉ có thể quay ược một vòng. 6 3
Hình 13.9.- Cấu tạo thiết bị o mức nước bằng bộ biến ổi tỷ lệ truyền dẫn.
1.- Phao cầu ; 2.- Sợi dây ; 3.- Puly ; 4.- Trục quay ; 5.- Con trượt ;
6.- Biến trở ; 7.- Lò xo xoắn ; 8.- Cơ cấu cam.
Với thiết bị này có thể o ược khoảng thay ổi từ vài chục centimét ến vài mét
với sai số cơ bản là 0,5 % trong giới hạn thang o.
4.- Bằng phao dạng trụ.
Trong sơ ồ hình 13.10, phao hình trụ (1) nhúng chìm trong chất lưu, phía trên
ược treo bởi một cảm biến o lực (2). Trong quá trình o, cảm biến chịu tác ộng của
một lực F tỉ lệ với chiều cao chất lưu : F = P - ρ.g.S.h trong
ó : P - trọng lượng phao.
h - chiều cao phần ngập trong chất lưu của phao.
S - tiết diện mặt cắt ngang của
phao. ρ - khối lượng riêng của chất
lưu. g - gia tốc trọng trường. lOMoARcPSD| 38777299
Hình 13.10.- Đo mức bằng phao hình trụ.
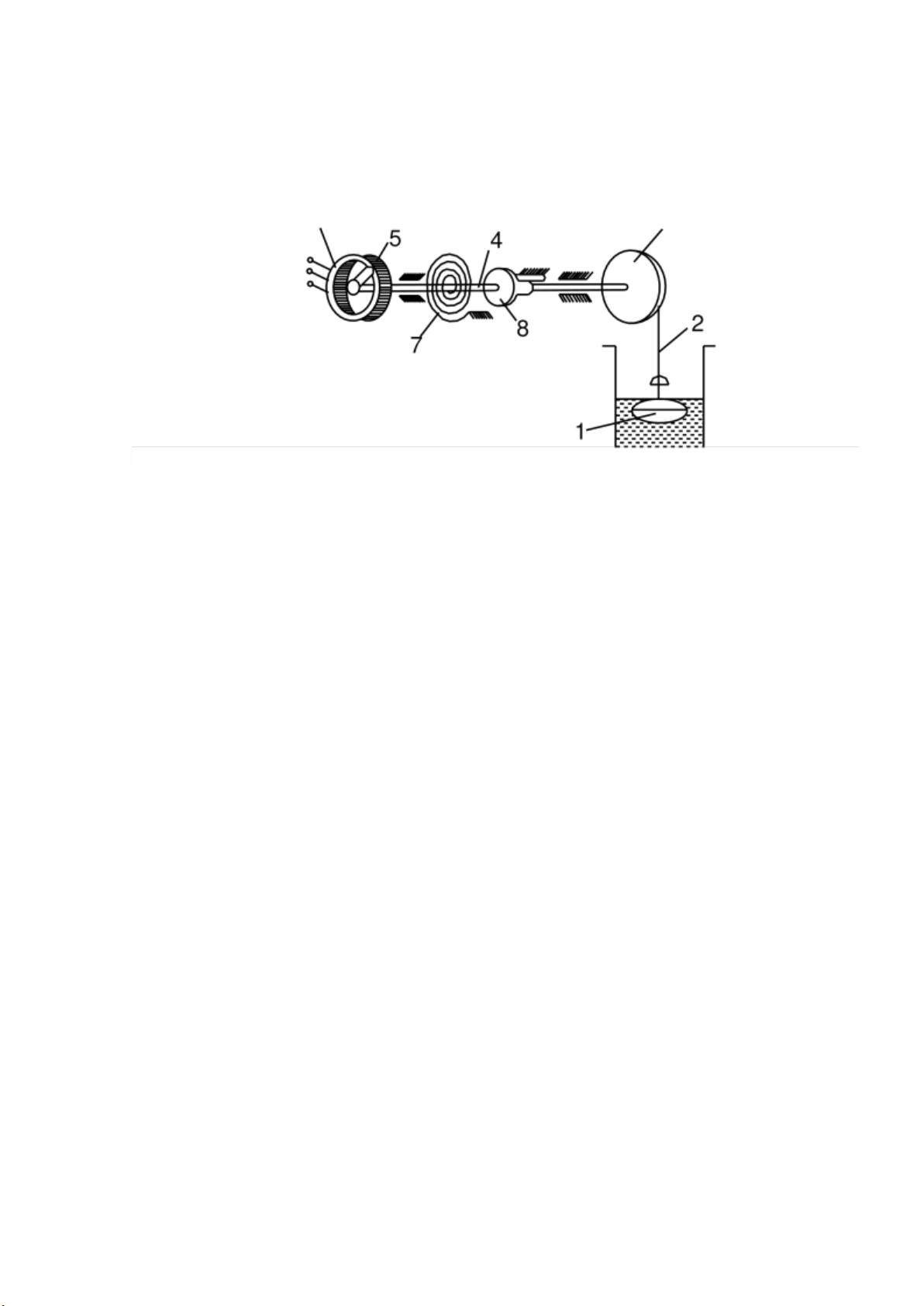
5.- Bằng phao truyền ộng iện.
Bố trí sơ ồ o như hình 13.11 .
Hình 13.11.- Cấu tạo thiết bị o mức bằng phao truyền ộng iện.
1.- Bình ựng dịch thể ; 2.- Phao ; 3.- Đối trọng ; 4.- Xenxin phát ; 5.- Xenxin thu.
Nguyên lý làm việc như phao quan sát, nhưng việc truyền tín hiệu mức dịch thể bằng xenxin.
Xenxin ược cấu tạo gồm hai phần :
- Phần cố ịnh gọi là stator.
- Phần di ộng gọi là rotor.
Xenxin có nhiều loại, như : stator 3 cuộn dây và rotor 1 cuộn dây hoặc rotor
và stator có các cuộn dây khác nhau.
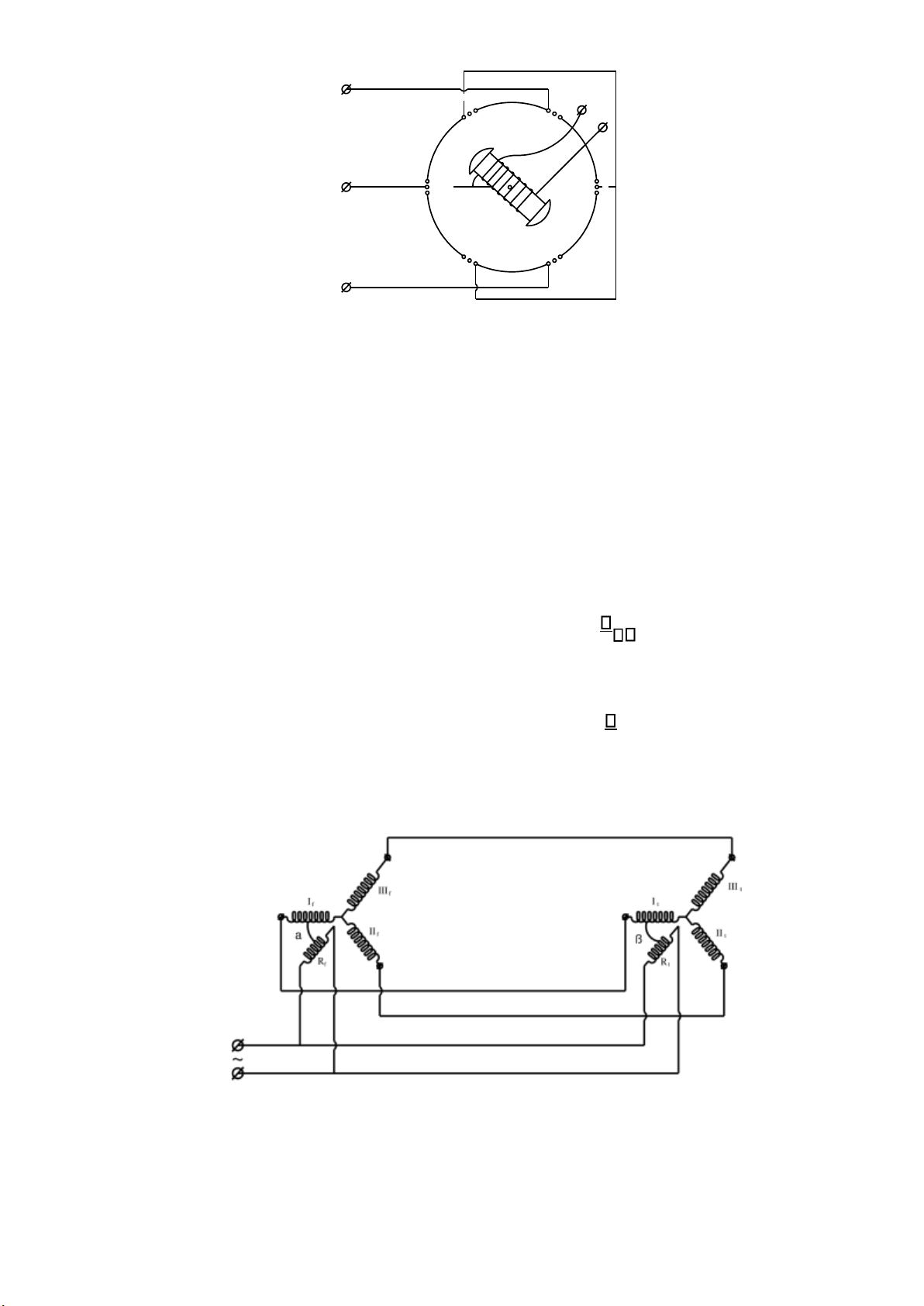
Đối với loại xenxin có rotor 1 cuộn dây và stator 3 cuộn dây mà trong ó 3
cuộn dây ược ặt lệch nhau 120o và ược mắc theo hình sao (hình 13.12). lOMoARcPSD| 38777299 II b III a ~ I a a I b III b II a
Hình 13.12.- Sơ ồ cấu tạo xenxin có rotor 1 cuộn dây và stator 3 cuộn dây.
Rotor ược kích thích bằng dòng iện xoay chiều với iện áp : U = Umax . cos2πωt
Giả sử khi rotor nằm ở một vị trí góc α so với phương nằm ngang thì trong
các cuộn của stator có xuất hiện các iện áp, lần lượt là :
EI = Emax . cos2πωt . cosα
EII = Emax . cos2πωt . cos ( 3 ) 2
EIII = Emax . cos2πωt . cos ( 3 + α ) 2
Tại sơ ồ o ta dùng 2 xenxin 4 , 5 và hai xenxin này phải hoàn toàn giống nhau
và mắc với nhau theo sơ ồ hình 13.13 :
Hình 13.13.- Cách mắc nối xenxin phát với xenxin thu.
α - vị trí góc của rotor xenxin phát so với phương nằm ngang.
β - vị trí góc của rotor xenxin thu so với phương nằm ngang. lOMoARcPSD| 38777299
Giả sử, khi góc α ≠ β thì trong mỗi cuộn dây của stator sẽ sinh ra các suất iện
ộng. Suất iện ộng của xenxin phát sẽ khác suất iện ộng của xenxin thu. Do vậy,
xenxin phát sẽ tác ộng lên rotor của xenxin thu một moment quay :
Mf-t = Mmax . sin ( α - β )
Mmax phụ thuộc vào chế tạo xenxin như : iện áp rotor, số vòng quay của rotor.
Ngược lại, xenxin thu cũng tác ộng lên rotor xenxin phát một moment quay :
Mt-f = Mmax . sin ( β - α )
Do các môment này làm cho các rotor quay và tiến tới triệt tiêu sai lệch, tức
là α = β. Hay mỗi vị trí của rotor xenxin phát tương ứng với một vị trí xác ịnh của
rotor xenxin thu hoặc nếu khi rotor xenxin phát quay thì rotor của xenxin thu cũng
quay ồng bộ với rotor xenxin phát.
Chúng ta biết rằng, vị trí của rotor xenxin phát ược xác ịnh bằng vị trí của
phao trên bề mặt dịch thể nên ở ây ta chỉ cần xác ịnh vị trí của rotor xenxin thu sẽ
cho ta giá trị mức dịch thể trong bình cần o.
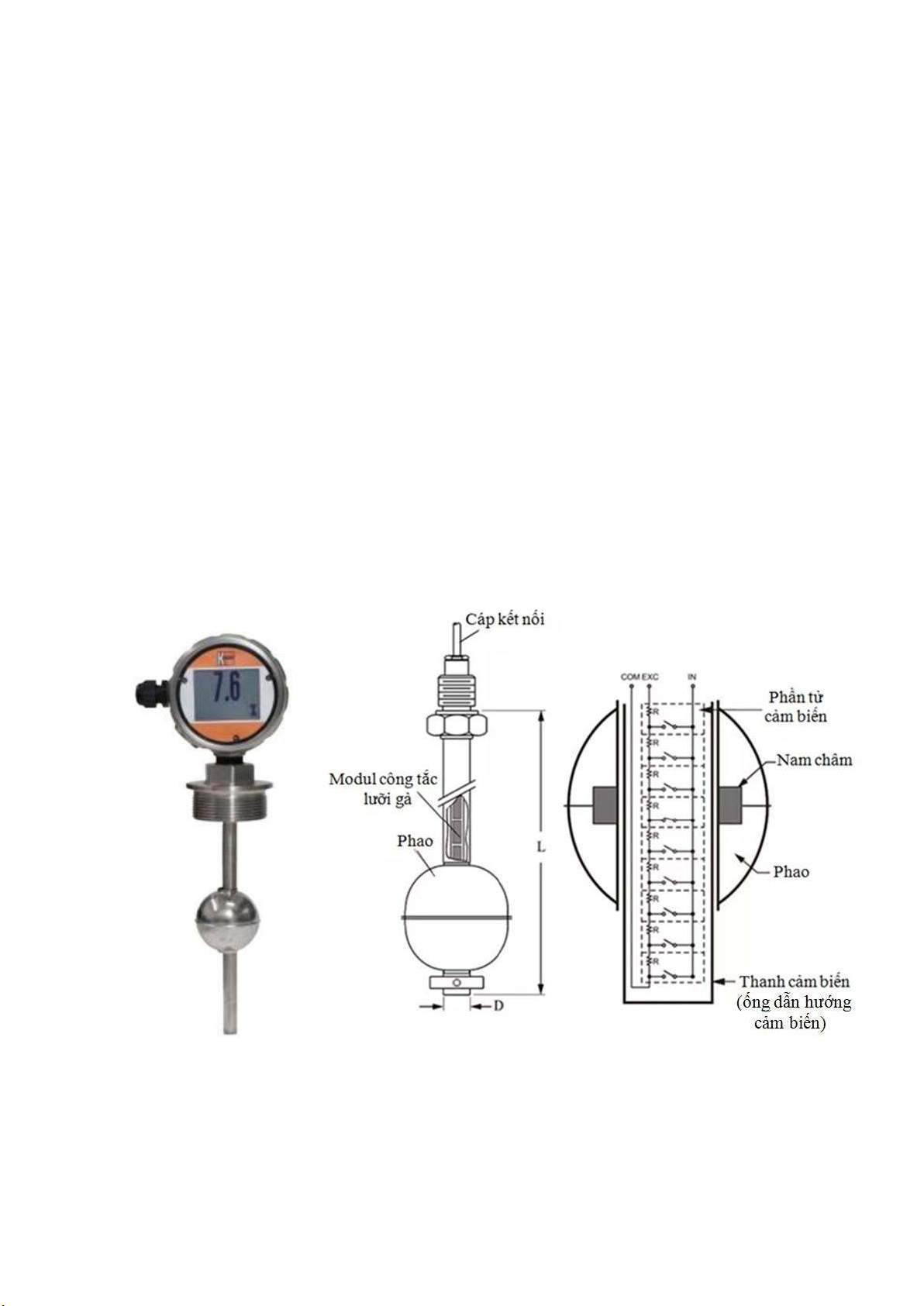
13.2.5.- Cảm biến báo mức chất lỏng kiểu phao từ.
Ngày nay, một loại phao phổ dụng ó là Cảm biến báo mức chất lỏng kiểu phao
từ (hình 13.14). Đây là loại phao kiểm soát toàn bộ mức nước trong bình.
Hình 13.14.- Cảm biến o mức nước dạng phao tuyến tính.
Ngày nay, một loại phao phổ dụng ó là Cảm biến báo mức chất lỏng kiểu phao
từ (hình 13.14). Đây là loại phao kiểm soát toàn bộ mức nước trong bình.
Cảm biến báo mức chất lỏng kiểu phao từ ược cấu tạo bởi phao từ báo mức
và ống dẫn hướng cảm biến (trục o). Trong ống dẫn hướng cảm biến (trục o) ã ược lOMoARcPSD| 38777299
bố trí dẫy iện trở nối tiếp nhau tạo thành một dải iện trở với các công tác kiểu lưỡi
gà. Quả phao có thể dịch chuyển dọc theo ống dẫn hướng cảm biến, bên trong quả
phao có bố trí các nam châm vĩnh cửu (xem cấu tạo cảm biến - hình 13.14). Khi
phao từ dịch chuyển lên hoặc xuống theo mức chất lỏng trong két/bồn, nam châm
vĩnh cửu khi chuyển ến mức gắn vị trí tiếp iểm lưỡi gà, nó sẽ tác ộng làm óng (hay
mở) các tiếp iểm tức nam châm sẽ chuyển trạng thái sang ON hoặc OFF. Tương ứng
lúc này, iện trở của cảm biến thay ổi, tức là từ tín hiệu cơ ược chuyển thành tín hiệu
iện. Từ giá trị iện trở này qua thang o tỷ lệ sẽ cho biết mức chất lỏng hiện tại o ược.
Khi sử dụng nam châm vĩnh cửu ể tác ộng lên tiếp iểm lưỡi gà ở cảm biến này
không cần phải dùng thêm nguồn nuôi ngoài. Mỗi tiếp iểm có thể hoạt ộng với tuổi
thọ khoảng 2 triệu lần.
Tất cả các ầu ra tín hiệu dễ dàng kết nối tại hộp gắn liền với cảm biến.Tín hiệu
iện có thể truyền i xa nhờ ược chuyển ổi sang dạng Analog 4~20mA, thiết bị còn có
thể kết nối với bộ iều khiển hiển thị dạng biểu ồ, thang chia…
Đây là loại thiết bị có nhiều lựa chọn cho từng môi trường o khác nhau, loại
này phù hợp với những không gian nhỏ, chật hẹp như ở bể ống, cảm biến siêu âm
không thể o ược và có thể chịu ược nhiệt ộ cao.
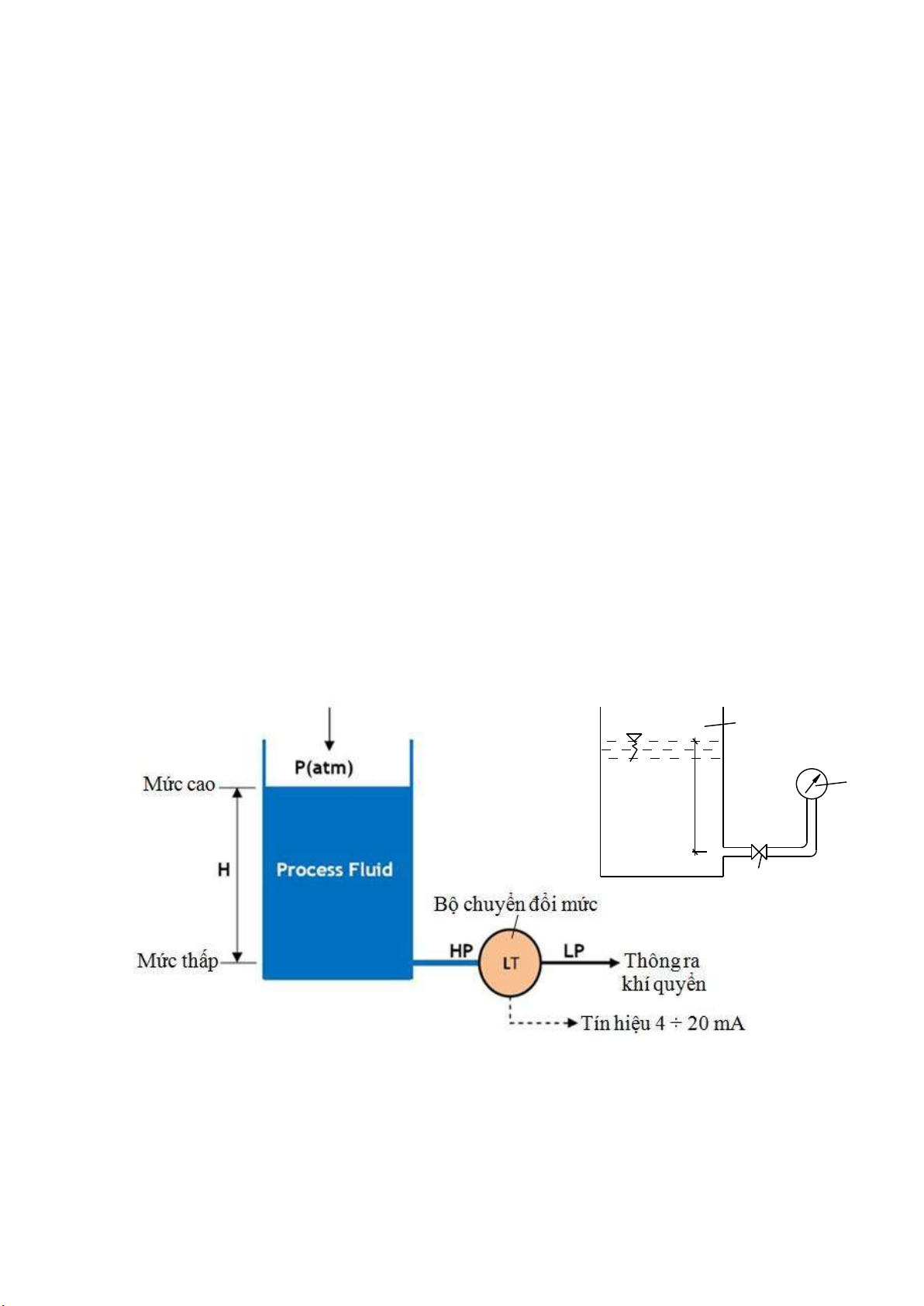
13.2.6.a.- Dùng cảm biến chênh áp o mức trong bồn/két hở.
Trên hình 13.1 là i xác ịnh mức chất lưu trong bồn/két hở bằng phương pháp
quan sát sẽ gập phải sai số khi ọc kết quả, không truyền i xa ược, không lưu gĩư ược
số liệu… Để khắc phục các nhược iểm trên có thể sử dụng cảm biến chênh áp (bộ
chuyển ổi o mức) ể xác ịnh mức chất lưu (hình 13.15.b). 1 3 H a) 3 b)
Hình 13.15.- Đo mức bằng cảm biến chênh áp.
Để o trực tiếp áp lực của cột dịch thể lên thành bình (hình 13.15.a) có thể dùng
áp kế 3 ể o. Hoặc sử dụng một cảm biến chênh áp suất dạng màng (LT) ặt sát áy
bình chứa. Mặt bên trái của cảm biến chịu áp suất chất lưu gây ra : p = ρ.g.H lOMoARcPSD| 38777299
Áp suất chất lỏng trong bể ược cảm nhận qua mặt bích ược gắn ở thành bể và
thông qua ường ống kết nối với phía màng cao (high) của bộ chuyển ổi (transmiter).
Phía bên màng thấp (low) ược ể thông ra khí quyển (hình 13.15.b).
Bộ chuyển ổi o mức (bộ chuyển ổi o chênh áp) ược gắn với bể chứa tại iểm
tương ứng với iểm mức “0” của dải o (mức thấp).
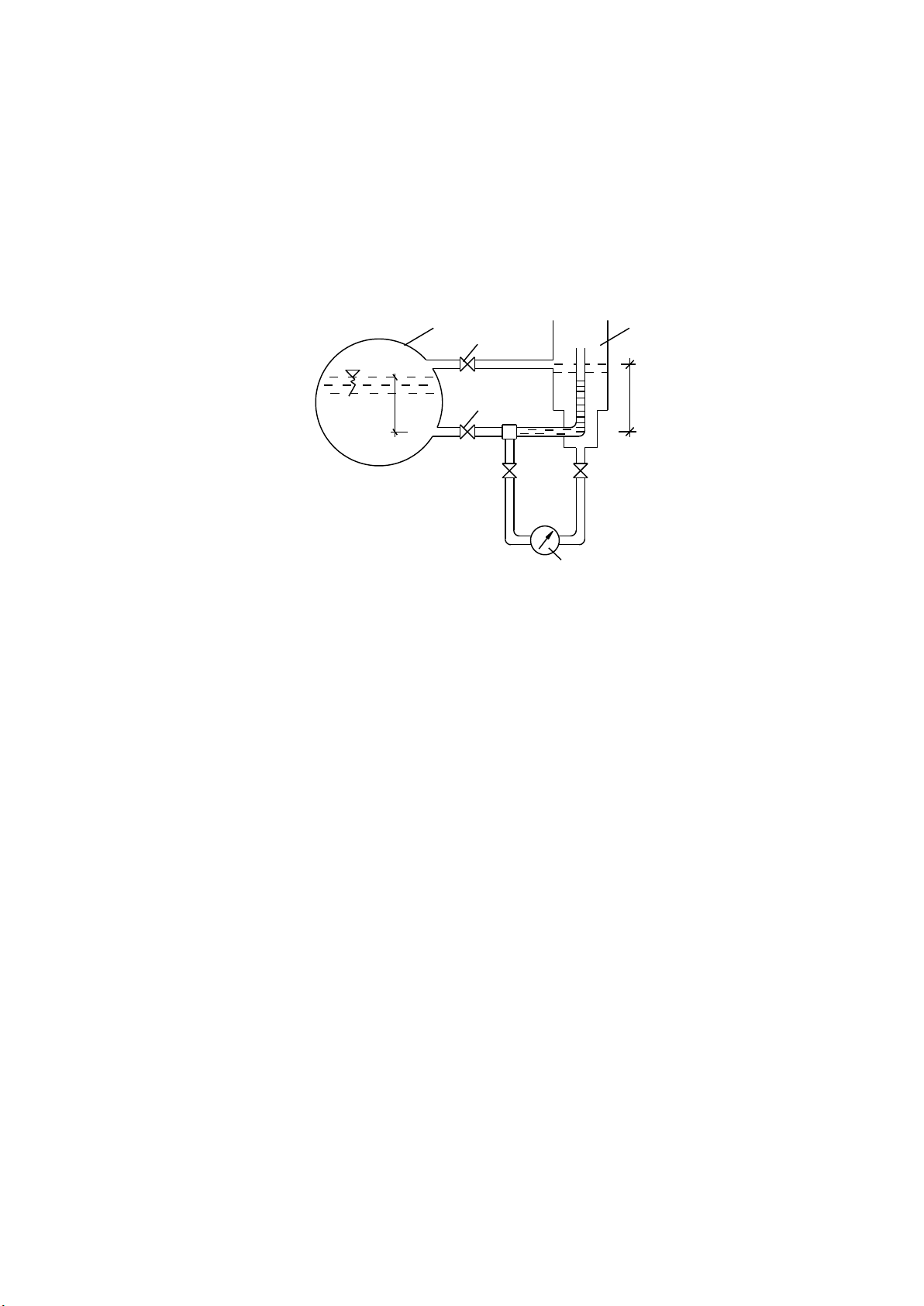
13.2.6.b.- Dùng cảm biến chênh áp o mức trong bồn/két kín.
Đây là phương pháp ược dùng o mức dịch trong nồi hơi (hình 13.16). 1 2 3 H H1 2 4
Hình 13.16.- Đo mức dịch thể trong bình bằng phương pháp so sánh.
1.- Bình chứa dịch thể cần o ; 2.- Bình so sánh ; 3 , 4.- Van ; 5.- Áp lực kế.
Phương pháp này dùng o mức dịch trong nồi hơi thông qua việc so sánh mức
dịch trong nồi hơi 1 với mức dịch trong bình so sánh 2.
Nguyên lý : mức dịch trong bình so sánh 2 không ổi nhờ hơi nước ngưng tụ
lại. Khi mức nước này càng lớn thì nó sẽ tràn qua nồi hơi 1 bằng ường nối qua van
3. Mức dịch trong ống qua van 4 ở bình so sánh 2 cân bằng với mức dịch trong nồi
hơi 1. Như vậy áp lực kế 5 sẽ o ược giá trị : P = γ1 . H1 - γ2 . H2
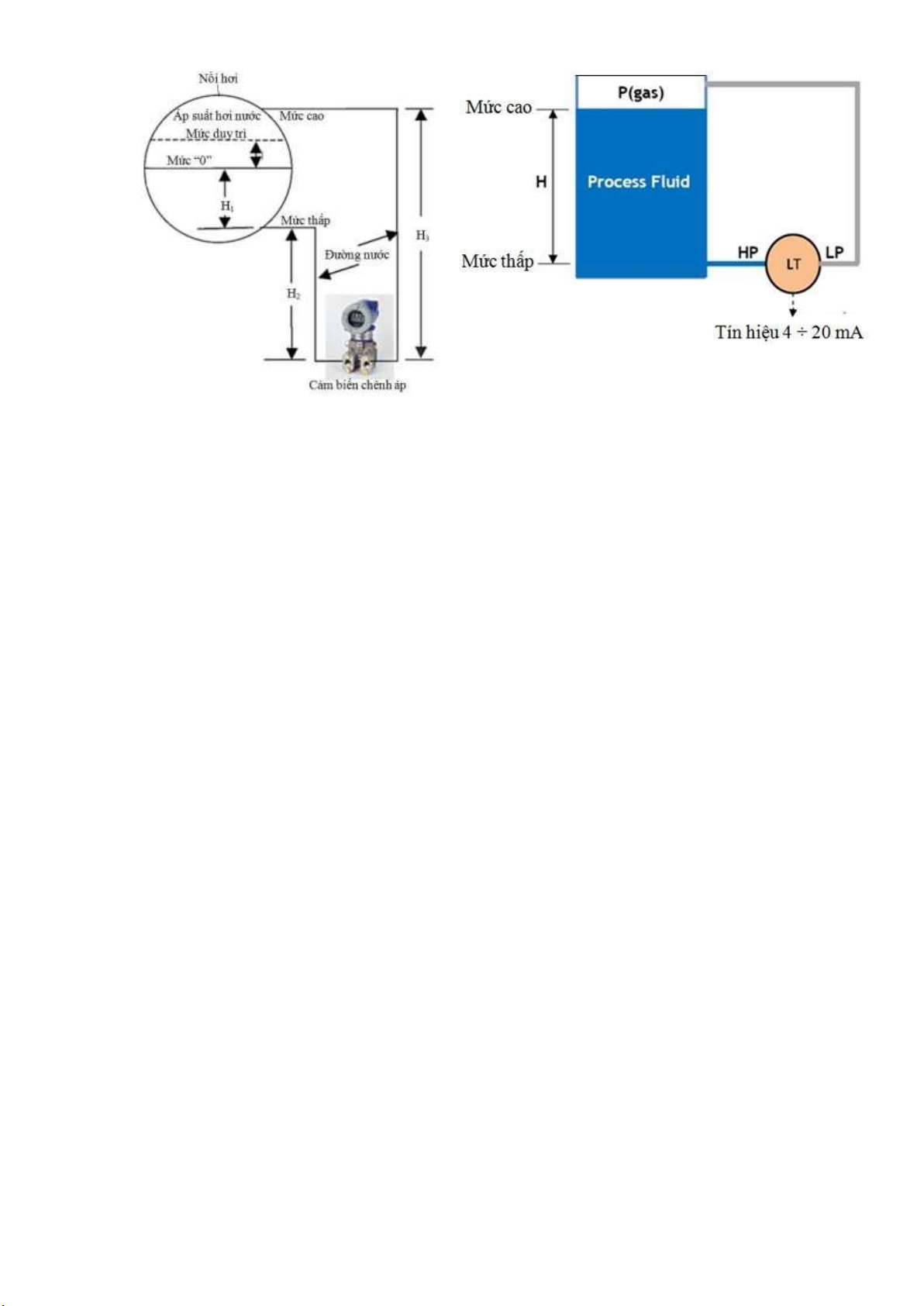
Hiện nay thiết bị o theo phương pháp này thường ược sử dụng là bộ chuyển
ổi chênh áp (DP Transmitter) hoặc bộ chênh mức (LT), hình 13.17.
Mặt bên phải của cảm biến chênh áp chịu tác ộng của áp suất pgas bằng áp suất
ở ỉnh bình chứa. Chênh lệch áp suất p – pgas sinh ra lực tác dụng lên màng của cảm
biến làm nó biến dạng. Biến dạng của màng tỉ lệ với chiều cao h của chất lưu trong
bình chứa ược chuyển ổi thành tín hiệu iện nhờ các bộ biến ổi iện thích hợp. lOMoARcPSD| 38777299 a) b)
Hình 13.17.- Đo mức chất lưu trong bồn/két kín bằng cảm biến chênh áp.
Như hình 13.17 : thiết bị o mức ược lắp ặt ở một bể chứa kín hoặc trong nồi
hơi là do luôn tồn tại chất khí ở trên chất lỏng nên phải bù thêm áp suất của chất khí ó khi o.
Điều này là do sự thay ổi áp suất khí sẽ gây ra sự thay ổi trong bộ chuyển ổi
mức (LT) ở phía ầu ra. Hơn nữa áp lực gây ra bởi chất khí có thể cao trong khi áp
lực của cột chất lỏng là không áng kể.
Một thùng chứa kín phải ược kết nối úng với thiết bị báo mức bằng chênh áp
: phía màng thấp (low) ược kết nối phần trên của bể chứa. Mục ích của nó là bù ắp
và cân bằng áp lực phía trên chất lỏng ể phép o mức trở nên chính xác. lOMoARcPSD| 38777299
Nếu không có kết nối này thì bộ chuyển ổi chênh áp sẽ hiển thị mức tổng áp của bể chứa :
Từ hình 13.17 ta có : P(high) = P(gas) + ρ.g.H và P(low) = P(gas)
Do ó chênh áp : ΔP = P(high) – P(low) = ρ.g.H
Như những gì ã thấy ở phép tính trên, Sự ảnh hưởng của áp suất khí bị loại bỏ
và chỉ áp suất tĩnh của chất lỏng ược cảm biến thu nhận.
13.2.7.- Đo mức bằng phương pháp iện dung.
Chất lưu là một chất có thể chịu sự biến dạng liên tục khi tác dụng ứng suất
cắt. Tất cả các chất khí ều là chất lưu nhưng không phải chất lỏng nào cũng là chất
lưu. Chất lưu là tập hợp của các trạng thái vật chất bao gồm chất lỏng, chất khí,
plasma và ôi khi cũng úng ối với chất rắn àn hồi.
Trong cách sử dụng thông thường, "chất lưu" ược sử dụng ể chỉ "chất lỏng",
và không có ngụ ý ể chỉ chất khí. Ví dụ, chất lưu dùng ể hãm phanh hay còn gọi là
"dầu thắng" là một loại dầu thủy lực và nó sẽ không phát huy tác dụng nếu nó ở trạng thái khí.
Chất lỏng tạo ra một bề mặt tự do (bề mặt không phải là hình dạng của vật
chứa) trong khi ó khí thì không có bề mặt này. Sự khác biệt giữa chất rắn và chất
lưu thì không hoàn toàn rõ ràng. Việc phân biệt ược tiến hành thông qua ánh giá ộ nhớt của các chất.
Cảm biến mức iện dung hoạt ộng dựa trên sự khác biệt hằng số iện môi giữa
chất lưu và không khí. Điều kiện cần thiết ể áp dụng phương pháp này là hằng số
iện môi của chất lưu phải lớn hơn hằng số iện môi của không khí, thường là gấp ôi.
Hằng số iện môi của không khí là khoảng 1.0 ;
Dầu có hằng số iện môi từ 1.8 ến 5,
Nước có hằng số iện môi ở giữa khoảng 50 ến 80.
Khi mức chất lưu thay ổi thì hằng số iện môi cũng thay ổi tương ứng. 1.- Nguyên lý :
Dựa vào tính chất thay ổi iện dung của một tụ iện khi mà có sự thay ổi iện môi trong tụ iện.
Tụ iện thường dùng là tụ iện hình trụ (hình 13.18).
Điện dung của tụ iện ược xác ịnh : Co = εo . L . 2 = 2. . o.L d d 2 ln ln 2 d1 d1 lOMoARcPSD| 38777299 d 1 L d 2 L 1
Hình 13.18.- Cấu tạo tụ iện hình trụ.
trong ó : εo - là hằng số iện môi.
Khi ặt tụ vào trong một bể dịch nào ó ể o mức. Giả sử mức dịch mà tụ nằm là khoảng
L . Lúc này iện dung của tụ là bằng iện dung của hai tụ iện mắc song song và ược 1 xác ịnh :
C = C1 + C2 = ε . L1 . 2 + εo . ( L - L1 ) 2 d2 d ln ln 2 d1 d1
trong ó : ε - hằng số iện môi của dịch.
εo - hằng số iện môi của không khí.
Như vậy, ối với một dịch thể nào ó thì ε, d1 , d2 = const , do vậy mà có thể thay thế :
C = L1 . K1 + Co - K2 . L1 = Co + ( K1 - K2 ) . L C C . o o trong ó : K1 = ; K2 = o L
Thực tế, tụ iện sử dụng xác ịnh mức dịch trong bình/bồn : một iện cực cách iện ược
nhúng vào chất lỏng (hình 13.19.a). Điện dung giữa thanh dẫn bên trong iện cực và
thành bồn ược o ưa về thay ổi theo mức chất lỏng (a) và (b) công tác mức dạng iện dung. lOMoARcPSD| 38777299
Trong trường hợp chất lưu là chất dẫn iện, ể tạo tụ iện người ta dùng một iện
cực kim loại bên ngoài có phủ cách iện, lớp phủ óng vai trò chất iện môi, còn chất
lưu óng vai trò iện cực thứ hai. a) b)
Hình 13.19.- Đo mức bằng cảm biến iện dung.
Quan hệ giữa iện dung C và mức dịch L trong bình (hình 13.14.b) ược diễn tả bằng công thức : C = 2. .
o.L ↔ L = C
11ln dd12 12 ln dd23 1 ln d 2 1 ln d3 2. . o 1 d1 2 d2
trong ó : εi là hằng số iện môi, εo là hằng số iện môi chân không,
Nếu chất lỏng có ộ dẫn iện cao, có thể ơn giản công thức trên : d2 ln d C = 2. .
o. 1.L ↔ L = 1 d2 2. . o. 1 ln d1 lOMoARcPSD| 38777299
Khi chất lỏng là chất cách iện, có thể tạo tụ iện bằng hai iện cực hình trụ nhúng
trong chất lỏng hoặc một iện cực kết hợp với iện cực thứ hai là thành bình chứa nếu
thành bình làm bằng kim loại. Chất iện môi giữa hai iện cực chính là chất lỏng ở
phần iện cực bị ngập và không khí ở phần không có chất lỏng. Việc o mức chất lưu
ược chuyển thành o iện dung của tụ iện, iện dung này thay ổi theo mức chất lỏng
trong bình chứa. Điều kiện ể áp dụng phương pháp này hằng số iện môi của chất
lỏng phải lớn hơn áng kể hằng số iện môi của không khí (thường là gấp ôi).
Như vậy, chỉ cần xác ịnh iện dung là xác ịnh ược mức dịch. Việc xác ịnh iện
dung có thể bằng cầu cân bằng cảm ứng iện dung hoặc cầu không cân bằng cảm ứng iện dung.
2.- Sơ ồ cầu cân bằng cảm ứng iện dung : hình 13.20 .
Hình 13.20.- Sơ ồ cầu cân bằng cảm ứng iện dung.
Cx.- Tụ iện của dụng cụ chuyển ổi ể o mức ; Cm.- Tụ iện mẫu.
Cuộn L1 , L2 ược mắc theo mạch cầu.
Khi dòng qua tụ Cx và Cm khác nhau thì trên iện trở R3 xuất hiện một iện áp
và ược ưa vào bộ khuếch ại, tín hiệu ra từ bộ khuếch ại sẽ iều chỉnh ộng cơ ảo chiều quay.
Khi ộng cơ ảo chiều quay sẽ làm thay ổi vị trí con chạy trên biến trở R sao
cho dòng i qua tụ Cx và Cm tiến tới bằng nhau, lúc ó iện áp sai lệch bằng 0, ộng cơ dảo chiều ngừng quay.
Vị trí con chạy trên biến trở R sẽ tương ứng với một giá trị và giá trị ó úng
bằng giá trị iện dung Cx tức là giá trị mức dịch thể. lOMoARcPSD| 38777299
Điện trở r1 dùng iều chỉnh iểm " 0 " của thang o khi mức dịch thể trong bể quy ịnh bằng 0.
Điện trở r2 dùng iều chỉnh giá trị cực ại của thang o.
3.- Sơ ồ cầu không cân bằng cảm ứng iện dung : hình 13.21.
Hình 13.21.- Sơ ồ cầu không cân bằng cảm ứng iện dung.
Chuyển ổi iện dung 1 là một thanh kim loại thẳng, phủ lớp chống ăn mòn hóa
học, ặt giữa thùng kim loại 2 ựng dịch thể cần o mức. Khi thùng 2 rỗng, iện dung
của thùng là 8 pF. Lúc ầy dịch thể, iện dung tăng lên ến 30 pF.
Chuyển ổi iện dung ược mắc vào một nhánh của mạch cầu không cân bằng
(MC). Nhánh thứ hai gồm có tụ iện C có iện dung 8 pF và tụ C 1 2 mắc song song với
tụ C1 có iện dung 22 pF qua khóa K. Hai nhánh khác của mạch cầu là các cuộn dây
thứ cấp của máy biến áp. Cầu ược cung cấp bởi một máy phát cao tần (MF), có tần
số từ 1 ÷ 10 MHz. Điện áp ra của mạch cầu ược chỉnh lưu qua bộ chỉnh lưu CL.
Để iều chỉnh cho chỉ thị có giá trị cực ại thực hiện bằng cách óng khóa K và
iều chỉnh iện trở R . Chỉ thị có thể là một miliampemét, iện thế kế tự ộng hoặc dụng c
cụ số. Thiết bị có thể o ược mức ở nhiệt ộ 100 oC và áp suất của bình từ 0 ÷ 106 N/m2
. Sai số của thiết bị ạt ược ộ tuyến tính trong khoảng o lớn, giải o từ cỡ vài mm ến 5 m.
13.2.8.- Đo mức bằng phóng xạ (bức xạ).
Cảm biến bức xạ cho phép o mức chất lưu mà không cần tiếp xúc với môi
trường o, ưu iểm này rất thích hợp khi o mức ở iều kiện môi trường o có nhiệt ộ, áp
suất cao hoặc môi trường có tính ăn mòn mạnh. 1.- Nguyên lý :
Theo dõi sự thay ổi mức dịch thể hay bề mặt dịch thể bằng phương pháp o
cường ộ phóng xạ của Côban 60 ( Co60 ).
Quy ịnh : cường ộ phóng xạ của Côban 60 phụ thuộc vào tính chất của vật qua nó.
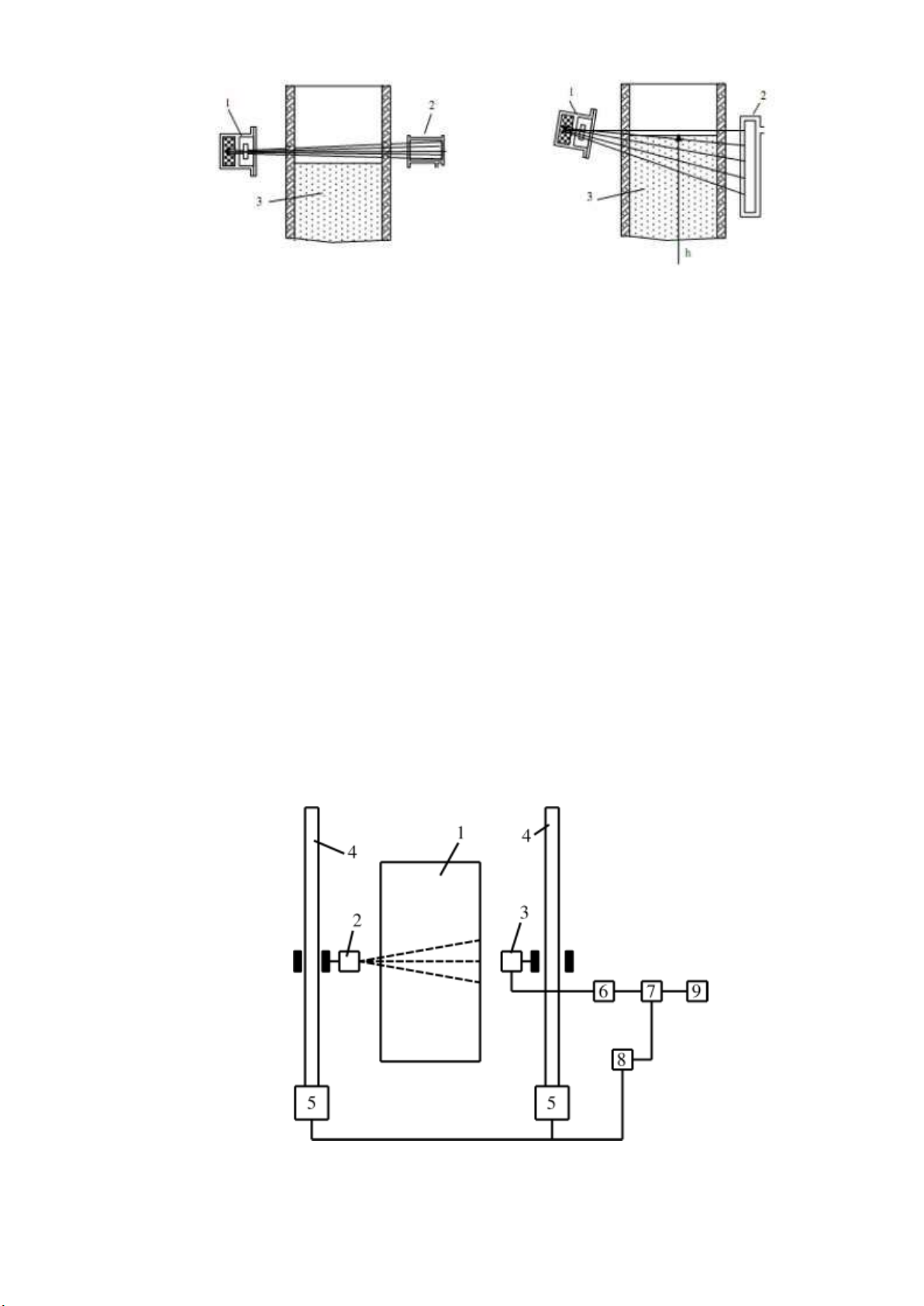
2.- Cảm biến o mức : lOMoARcPSD| 38777299 a) b)
Hình 13.22.- Cảm biến o mức bằng tia bức xạ.
a) Cảm biến phát hiện ngưỡng b) Cảm biến o mức liên tục
1) Nguồn phát tia bức xạ 2) Bộ thu 3) Chất lưu.
Cảm biến (hình 13.22) gồm một nguồn phát tia (1) và bộ thu (2) ặt ở hai phía
của bình chứa. Nguồn phát thường là một nguồn bức xạ tia γ (nguồn 60Co hoặc
137Cs), bộ thu là một buồng ion hoá. Ở chế ộ phát hiện mức ngưỡng (hình
13.22.a), nguồn phát và bộ thu ặt ối diện nhau ở vị trí ngang mức ngưỡng cần phát
hiện, chùm tia của nguồn phát mảnh và gần như song song. Tuỳ thuộc vào mức chất
lưu (3) cao hơn hay thấp hơn mức ngưỡng mà chùm tia ến bộ thu sẽ bị suy giảm
hoặc không, bộ thu sẽ phát ra tín hiệu tương ứng với các trạng thái so với mức ngưỡng.
Ở chế ộ o mức liên tục (hình 13.22.b), nguồn phát (1) phát ra chùm tia với
một góc mở rộng quét lên toàn bộ chiều cao của mức chất lưu cần kiểm tra và bộ thu.
Khi mức chất lưu (3) tăng do sự hấp thụ của chất lưu tăng, chùm tia ến bộ thu
(2) sẽ bị suy giảm, do ó tín hiệu ra từ bộ thu giảm theo. Mức ộ suy giảm của chùm
tia bức xạ tỉ lệ với mức chất lưu trong bình chứa.
3.- Sơ ồ o : hình 13.23 .
Hình 13.23.- Hệ thống o mức dịch thể bằng phóng xạ.
1.- Bể chứa dịch ; 2.- Nguồn phóng xạ Côban 60 ; 3.- Thiết bị thu nhận tia phóng xạ ;
4.- Hai vít quay ồng bộ với nhau nhờ các xenxin thu ; 5.- Xenxin thu ; 6.- Thiết bị so sánh và khuếch ại tín hiệu ;
7.- Cơ cấu chấp hành ; 8.- Xenxin phát ; 9.- Dụng cụ chỉ thị. lOMoARcPSD| 38777299 4.- Làm việc :
Nguồn phóng xạ 2 (Côban 60) và thiết bị thu nhận phóng xạ 3 ược nâng lên
hạ xuống như nhau nhờ xenxin thu 5.
Nguồn phóng xạ 2 và thiết bị thu nhận phóng xạ 3 ược ặt ngang mức dịch.
Khi iểm giữa của thiết bị thu nhận phóng xạ 3 nằm ngang với bề mặt dịch thì tín
hiệu thu ược do năng lượng phóng xạ ưa tới sẽ ược em so sánh với tín hiệu ở thiết
bị 6, nếu cân bằng sẽ không có tín hiệu vào 7.
Khi mức dịch trong bình 1 thay ổi thì tín hiệu thu ược ở thiết bị thu nhận
phóng xạ 3 cũng thay ổi, vì vậy sẽ xuất hiện sai lệch so với tín hiệu so sánh, ầu ra
thiết bị 6 có iện áp ể iều chỉnh cơ cấu chấp hành 7 làm việc. Khi cơ cấu chấp hành
7 làm việc sẽ làm quay rotor xenxin phát 8, dẫn ến hai xenxin thu 5 sẽ quay ồng bộ
với với rotor phát ể ồng thời thay ổi vị trí của nguồn phóng xạ và thiết bị thu nhận
phóng xạ 3. Khi nào iểm giữa của thiết bị thu nhận phóng xạ 3 trùng với bề mặt
dịch thể thì tín hiệu ra ở thiết bị 6 bằng 0 thì hệ thống xenxin dừng quay. Dụng cụ
chỉ thị 9 sẽ cho giá trị mức dịch trong bể 1.
13.2.9.- Đo mức bằng cảm biến sóng siêu âm.
+ Nguyên lý cảm biến siêu âm :
Cảm biến siêu âm hoạt ộng dựa trên nguyên lý phát sóng âm ra ngoài, khi
sóng âm tiếp cận tới các vật thể (chất lỏng như nước, nước thải, chất lỏng dạng kết
dính…, chất rắn như hạt nhựa, cát, á, xi măng, bột, cám gạo…) sẽ phát tín hiệu xung
ưa về cảm biến, sau ó cảm biến sẽ chuyển ổi tín hiệu ưa về thành tín hiệu dòng 4 ÷
20 mA tiếp tục truyền i tới các thiết bị kết nối ể phát tín hiệu kết quả o ược cho người dùng (hình 13.24).
Cảm biến siêu âm hoạt ộng theo nguyên lý y chang nguyên lý hoạt ộng của
loài dơi vào ban êm. Loài dơi vào ban êm tuy không thấy gì nhưng nó vẫn bay với
tốc ộ cao và không bị va vào vật cản, lý do là loài dơi cũng hoạt ộng bằng cách phát
ra sóng âm, khi sóng âm tiếp cận vật thể sẽ phản xạ xung tín hiệu ngược trở lại báo
cho con dơi biết nơi ó có vật cản, giúp nó tránh ược. lOMoARcPSD| 38777299
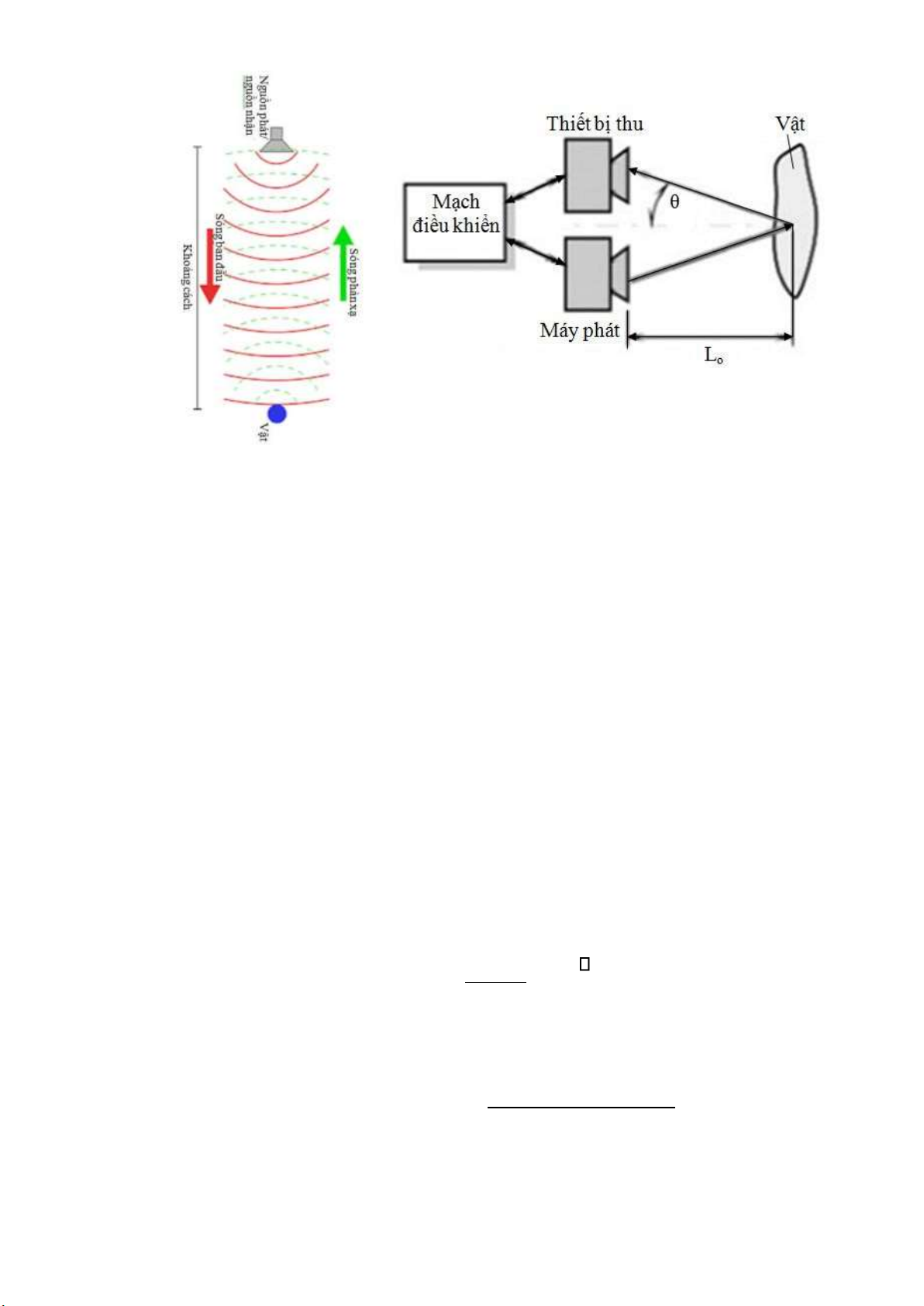
Hình 13.24.- Nguyên lý o mức bằng cảm biến song siêu âm.
+ Cấu tạo cảm biến siêu âm :
Chuẩn cấu tạo của một cảm biến siêu âm gồm 3 phần chính : -
Bộ phận truyền tín hiệu sóng âm với vai trò phát ra sóng âm truyền i. -
Bộ phận nhận lại tín hiệu sóng âm với vai trò nhận lại sóng âm báo về. -
Bộ phận xử lý sóng âm sau khi nhận ược sự phản hồi của tín hiệu
ưa về, lập tức bộ phận này sẽ tính toán khoảng cách giữa iểm phát sóng và
iểm sóng chạm vào vật thể thông qua thời gian sóng phát tới vật thể và vận
tốc truyền i của sóng siêu âm, cuối cùng chuyển những thông tin này thành
một tín hiệu analog truyền về một bộ chuyên ọc tín hiệu ể hiển thị thông tin cho người sử dụng.
Khoảng cách giữa iểm phát sóng và iểm sóng chạm vào vật thể ược xác ịnh theo biểu thức : Lo = vt. .cos 2
Trong ó : v - vận tốc sóng siêu âm (343 m/s trong không khí).
t - thời gian từ lúc phát ến lúc thu.
Ưu iểm của phương pháp sử dụng cảm biến o mức nước bằng siêu âm là cảm
biến không cần tiếp xúc với nước. Cảm biến siêu âm sẽ truyền sóng siêu âm xuống
bồn chứa. Khi chạm vào bề mặt nước sóng sẽ phản xạ trở lại. Cảm biến sẽ thu lại
sóng phản xạ và so sánh với sóng phát ra (hình 13.25). Từ ó tính toán và xuất ra tín
hiệu 4 ÷ 20mA tương ứng. lOMoARcPSD| 38777299
Hình 13.25.- Sử dụng cảm biến sóng siêu âm o mức chất lưu trong bồn/két.
Cảm biến báo mức nước bằng siêu âm cũng có những nhược iểm nhất ịnh.
Do cơ chế hoạt ộng dựa trên việc truyền và nhận lại sóng siêu âm nên cảm biến siêu
âm rất nhạy cảm với bề mặt. Cụ thể là bọt khí cũng làm giảm ộ chính xác của cảm
biến. Hay vị trí lắp ặt không úng thì cảm biến cũng bị ảnh hưởng. Do ó, khi chọn
cảm biến báo mức nước bằng siêu âm thì cần hỏi kỹ nhà cung cấp ể lựa chọn ược
cảm biến hoạt ộng tốt nhất.
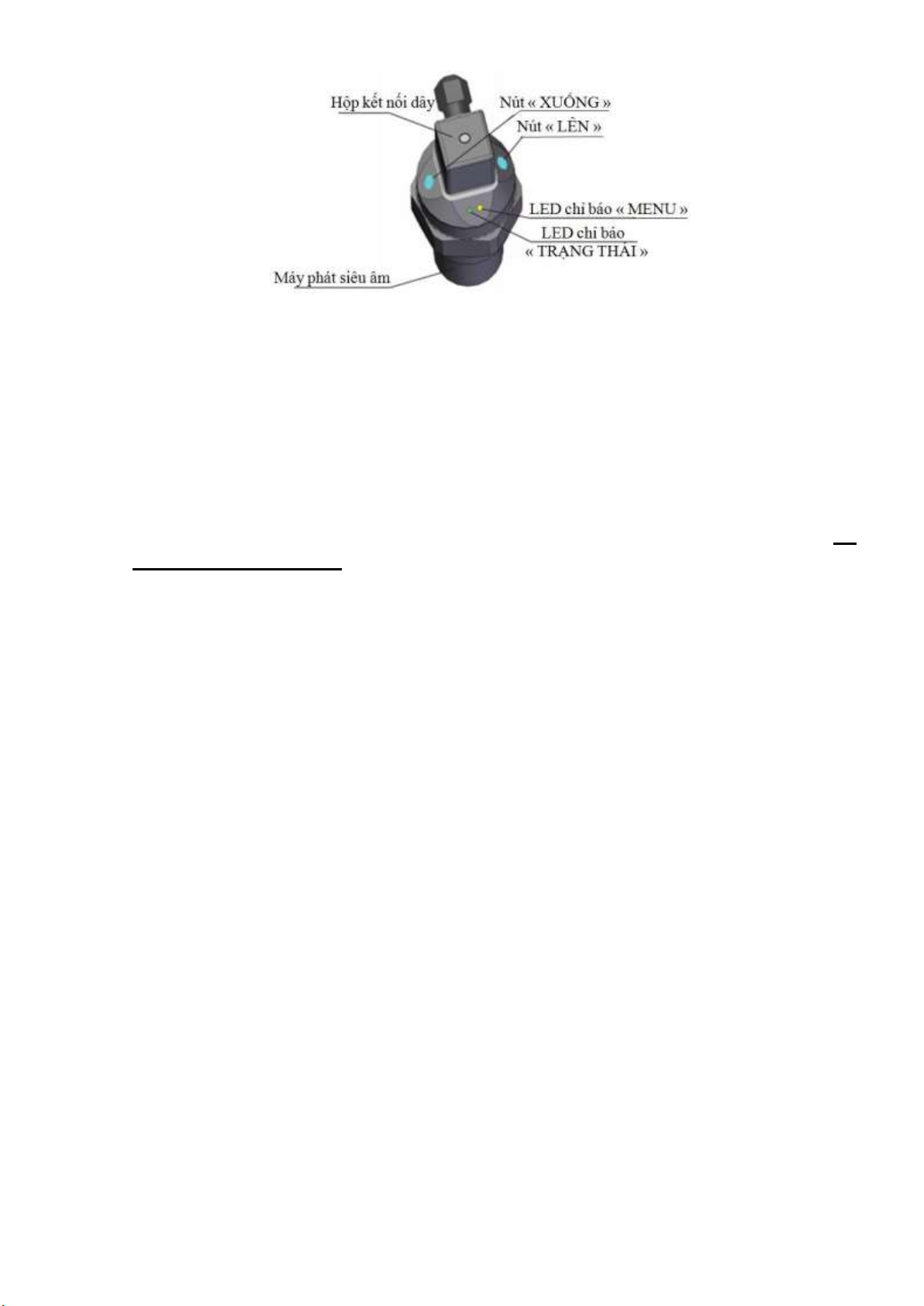
Hình ảnh của cảm biến báo mức nước siêu âm cho trên hình 13.26 :
Hình 13.26.- Hình ảnh cảm biến báo mức sóng siêu âm.
- Thông số kỹ thuật của cảm biến báo mức nước siêu âm : .
Tầm o : có nhiều dãy o khác nhau (2m, 6m, 10m, 20m) .
Có thể cài ặt ược tầm o theo kích thước bồn chứa.
. Vật liệu : nhựa cao cấp PVDF chống ăn mòn và va ập.
. Sai số : 0,2% trên tổng thang o. . Chuẩn bảo vệ : IP67
. Output : 4 ÷ 20mA hoặc 0 ÷ 10V.
. Kích thước khác nhau tùy theo tầm o.
. Xuất xứ : Dinel (CH Séc). lOMoARcPSD| 38777299
Hình 13.27.- Chỉ dẫn khi sử dụng cảm biến sóng siêu âm.
Ngoài ứng dụng báo mức nước, cảm biến siêu âm còn thích hợp cho các ứng
dụng liên quan ến chất lỏng khác như : báo mức nước thải, báo mức acid, o mức hóa chất, o mức xăng, dầu.
Đối với loại cảm biến siêu âm không có ồng hồ hiển thị giá trị như trên hình 13.27.
Chúng ta muốn theo dõi mức nước hiện tại trong bồn cần sử dụng thêm bộ
chia tín hiệu 4 ÷ 20mA. Ngõ ra ược chia thành 2 tín hiệu 4 ÷ 20mA ộc lập. Từ ó ta
có thể vừa giám sát vừa lấy tín hiệu iều khiển. -
Ưu iểm của cảm biến siêu âm : . Lắp ặt ơn giản.
. Tốc ộ phản ứng nhanh.
. Dãy o có thể cài ặt theo yêu cầu của nhà máy.
. Giá thành tương ối cạnh tranh so với các loại cảm biến khác. - Nhược iểm :
. Chỉ hoạt ộng trong môi trường nhiệt ộ và áp suất thông thường.
. Không chịu ược nhiệt ộ, áp suất cao.
Với ộ chính xác cao, o ược nhiều môi chất khác nhau nên cảm biến báo mức
nước bằng siêu âm vẫn ược sử dụng rất phổ biến.
13.2.10.- Đo mức bằng cảm biến báo mức sóng radar.
Ngoài phương pháp sử dụng cảm biến siêu âm thì cảm biến radar cũng là một
lựa chọn hợp lý khi o mức nước.
Cảm biến o mức Radar ược chia làm 2 loại : -
Cảm biến Radar không tiếp xúc với môi chất cần o. Nguyên
lý hoạt ộng tương tự như cảm biến o mức siêu âm. Nhưng sóng radar có tốc
ộ phản ứng nhanh hơn, vì sóng radar có vận tốc bằng tốc ộ ánh sáng, sóng
siêu âm chỉ có vận tốc bằng âm thanh lOMoARcPSD| 38777299 -
Cảm biến Radar tiếp xúc : Có cấu tạo tương tự như cảm biến
iện dung, nhưng nguyên lý hoàn toàn khác. Cảm biến radar sẽ phát ra sóng
radar liên tục trên que o. Khi tiếp xúc với môi chất cần o, sóng Radar sẽ phản
hồi lại cảm biến. Thời gian phát và nhận sóng sẽ ược xử lý và ưa ra tín hiệu
tuyến tính 4 ÷ 20mA qui ổi ra mức chất lỏng, chất rắn cần o.
Cả 2 loại ều có nguyên lý tương tự như cảm biến siêu âm. -
Ưu iểm cảm biến o mức Radar :
. Tốc ộ xử lý nhanh (tốc ộ âm thanh xấp xỉ bằng 331m/s, còn tốc ộ radar là
300.000 km/s) nên triệt tiêu ược các sóng ảo. . Độ chính xác cao.
. Sai số chỉ ± 2mm với toàn dãy o.
. Làm việc trong môi trường nhiệt ộ và áp suất cao rất ổn ịnh. -
Nhược iểm : Giá thành cao so với các loại cảm biến iện dung, siêu âm…
Cảm biến mức ra a sử dụng ăng ten ặt trên nóc bình chứa phát ra những chùm
sóng viba xuống bề mặt chất lưu, và mạch iện ịnh thời làm nhiệm vụ tính toán
khoảng cách từ ầu ăng ten tới bề mặt chất lưu dựa vào thời gian di chuyển của sóng
viba từ lúc phát i tới lúc nhận ược. ở phương pháp này, nếu hằng số iện môi của chất
lưu thấp có thể ảnh hưởng tới chất lượng của kết quả o, vì lượng năng lượng sóng
phản hồi phụ thuộc vào hằng số iện môi của chất lưu. Nếu hằng số iện môi thấp,
sóng viba (ra a) sẽ bị hấp thụ vào dung dịch hoặc i xuyên qua.
Sóng viba (ra a) cũng bị phân tán giống như sóng siêu âm trong cảm biến sóng
siêu âm. Thành bình chứa, cặn bám vào ăng ten, hay các vật cản cũng có thể gây ra
tín hiệu sai lệch cho cảm biến. Để khắc phục nhược iểm này, những thuật toán phức
tạp sử dụng logic mờ ược tích hợp cho bộ phát tín hiệu. Nhưng nếu như vậy lại xảy
ra một khó khăn khác ó là việc lập trình trở nên phức tạp và phải thay ổi theo từng môi trường.
Một giải pháp ược coi là câu trả lời cho những khó khăn trên ó là một loại
cảm biến ra a dẫn sóng. Một ống dẫn sóng làm bằng vật liệu cứng hay một dây ăng
ten làm thiết bị dẫn sóng viba từ nóc bình chứa xuống bề mặt chất lưu và ưa tín hiệu
về bộ nhận. Phương pháp này tỏ ra hiệu quả hơn nhiều so với phương pháp trước.
Sóng viba không bị ảnh hưởng bởi vật cản, nhiệt ộ hay áp suất. Ngoài ra, nó còn linh
hoạt trong lắp ặt, có thể lắp ặt theo chiều ngang hay dọc ều ược.
Cảm biến o mức bằng sóng Radar là một trong những công nghệ tiên tiến nhất
trong các phương pháp o lường liên tục chất lỏng - chất rắn cho ến thời iểm hiện tại.
Phương pháp o mức liên tục bằng sóng radar cho phép o với ộ chính xác cao, thời
gian áp ứng nhanh, ộ bền lâu dài.
Lý do ể chọn cảm biến o mức bằng sóng Radar thay vì cảm biến o mức bằng
sóng siêu âm vì những lý do sau : lOMoARcPSD| 38777299 -
Đo ược trong mọi môi trường khác nhau từ chất lỏng như axit, hoá chất,
nước, nước thải… cho ến chất rắn như bột mì, thức ăn gia súc, lúa, gạo, cám … -
Vật liệu cao cấp hơn phần lớn là Inox 316L. -
Cảm biến o mức bằng sóng Radar khoảng o tối thiểu là 40m ÷ 100m
trong khi cảm biến o mức bằng sóng siêu âm chỉ từ 5m ÷ 25 m . -
Góc nghiêng của cảm biến o mức bằng sóng Radar rất nhỏ chỉ khoảng
4 ộ cho phép tia chiếu xuống không bị lệch ra bên ngoài . -
Cảm biến o mức bằng sóng Radar có thể triệt tiêu các sóng ảo do bọt
khí hay bụi… ảm bảo ộ chính xác cao nhất . -
Độ chính xác của cảm biến o mức bằng sóng Radar từ 1 ÷ 4mm trong
khi ộ chính xác của cảm biến o mức bằng sóng siêu âm là 0,1% .
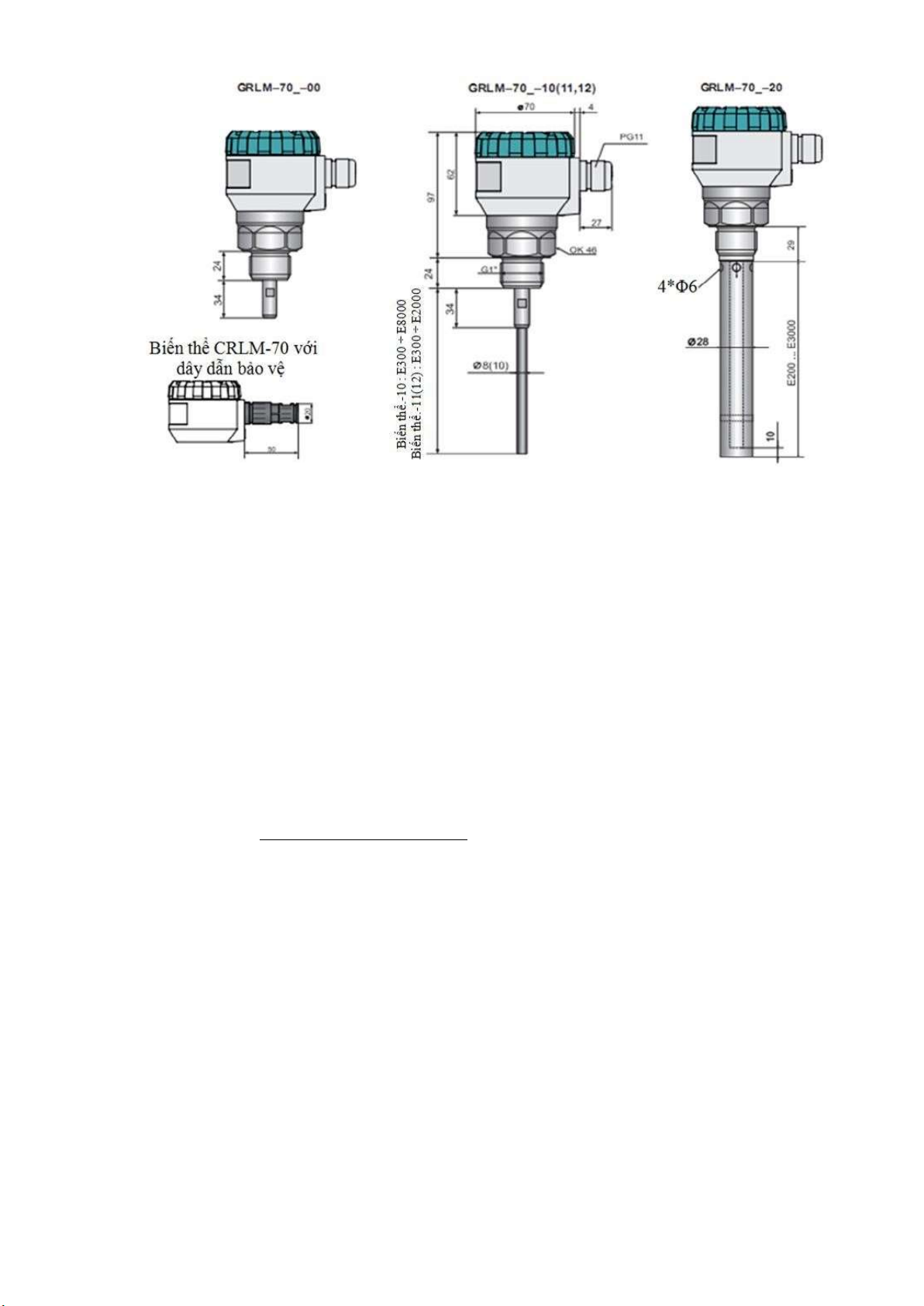
Cảm biến báo mức nước radar có dây dẫn sóng như trên hình 13.28 vẫn ược
sử dụng phổ biến hơn. Cảm biến radar sẽ có que o và ược thả vào trong bồn chứa
nước. Sóng vô tuyến truyền dọc theo que o. Khi nước chạm vào que o thì cảm biến
sẽ tính toán và xuất ra tín hiệu 4-20mA tương ứng. Cảm biến radar có ưu iểm là ộ
chính xác cao hơn siêu âm. Đo ó, ngoài o chất lỏng thì cảm biến radar còn ược sử dụng ể o chất rắn.
Hình 13.28.- Cảm biến báo mức nước radar dạng dây dẫn sóng.
Dựa vào hình 13.28 có thể thấy ược cách o của cảm biến báo mức nước bằng
radar. Nhược iểm của loại này là phải tiếp xúc trực tiếp với môi chất cần o. Tuy
nhiên, cũng có thể xem ó là ưu iểm của nó vì như vậy ộ chính xác của cảm biến sẽ
cao hơn loại không tiếp xúc. -
Thông số kỹ thuật cảm biến báo mức nước radar :
. Tầm o : có nhiều tầm o như 2m, 8m, 20m, 40m.
. Có thể cài ặt ược tầm o. lOMoARcPSD| 38777299
Hình 13.29.- Thông số kỹ thuật cảm biến radar dạng dây dẫn sóng..
. Kích thước a dạng tùy thuộc vào tầm o.
. Vật liệu : nhựa cao cấp PVDF. . Chuẩn bảo vệ : IP67
. Output : 4 ÷ 20mA chuẩn HART.
. Có màn hình LED hiển thị giá trị.
. Sai số : 2mm trên tổng thang o.
. Xuất xứ : Dinel (CH Séc).
Đối với cảm biến báo mức nước bằng radar. Giá trị o ược sẽ ược hiển thị trên
màn hình trên ầu cảm biến (hình 13.30). Từ ó, chúng ta có thể dễ dàng giám sát và
theo dõi mức nước trong bồn mà không cần sử dụng ến thiết bị nào khác (xem cảm
biến của hãng Dinel). Với màn hình hiển thị sẽ giúp quá trình giám sát dễ dàng hơn
và hệ thống chuyên nghiệp hơn. lOMoARcPSD| 38777299
Hình 13.30.- Màn hình trên ầu cảm biến.
Đối với cảm biến báo mức nước bằng radar. Giá trị o ược sẽ ược hiển thị trên
màn hình trên ầu cảm biến (hình 13.30). Từ ó, chúng ta có thể dễ dàng giám sát và
theo dõi mức nước trong bồn mà không cần sử dụng ến thiết bị nào khác (xem cảm
biến của hãng Dinel). Với màn hình hiển thị sẽ giúp quá trình giám sát dễ dàng hơn
và hệ thống chuyên nghiệp hơn.
Tóm lại, ể o mức nước có nhiều giải pháp khác nhau. Mỗi giải pháp sẽ có ưu
nhược iểm riêng. Do ó, khi lựa chọn một giải pháp nào ó chúng ta cần xem xét ến
chất lượng, giá cả và áp ứng ược nhu cầu ề ra. Ví dụ nếu như cần o chính xác cao
thì nên sử dụng radar mặc dù giá thành radar lúc nào cũng cao hơn siêu âm. Còn nếu
không yêu cầu ộ chính xác quá cao thì bạn có thể chọn siêu âm ể tiết kiệm chi phí.
13.2.11.- Đo mức vật thể hạt.
Hiện nay các giải pháp o mức chất lỏng trong công nghiệp rất da dạng. Tùy
vào mục ích sử dụng mà chúng ta chọn một phương pháp phù hợp. Đối với các chất
lỏng có ộ bám dính cao như : nhựa, keo, dầu, nhớt, nước sơn, nước ường… thì òi
hỏi phải sử dụng cảm biến có khả năng chống bám dính tốt hoặc các cảm biến o
không cần tiếp xúc. Tuy nhiên, giải pháp o bằng cảm biến không tiếp xúc (siêu âm,
radar) rất tốn kém nên thông thường trong trường hợp này chúng ta sử dụng ến các cảm biến o ON/OFF.
Theo nguyên lý thì các phương pháp o mức dịch thể ều có thể dùng o mức vật
thể hạt trong bể chứa, nhưng do vật thể hạt có tính chất khác dịch thể nên vấn ề sử
dụng các phương pháp này phải khác i nên cấu trúc sơ ồ sẽ khác.
Như dịch thể, vật thể hạt tác dụng lên áy bể, thành bể một lực phụ thuộc vào
chiều cao của cột vật thể.
Do vật thể hạt có sự ma sát với nhau, ma sát với thành bể. Ngoài ra còn có sự
dính kết giữa các hạt với nhau và với thành bể. Vì thế mà lực ma sát, lực dính kết
càng lớn thì áp lực càng lớn. Vậy quan hệ giữa mức vật thể với áp lực là quan hệ phi tuyến. lOMoARcPSD| 38777299
Phương pháp này chỉ dùng ể báo hiệu mức giới hạn của vật trong bể.
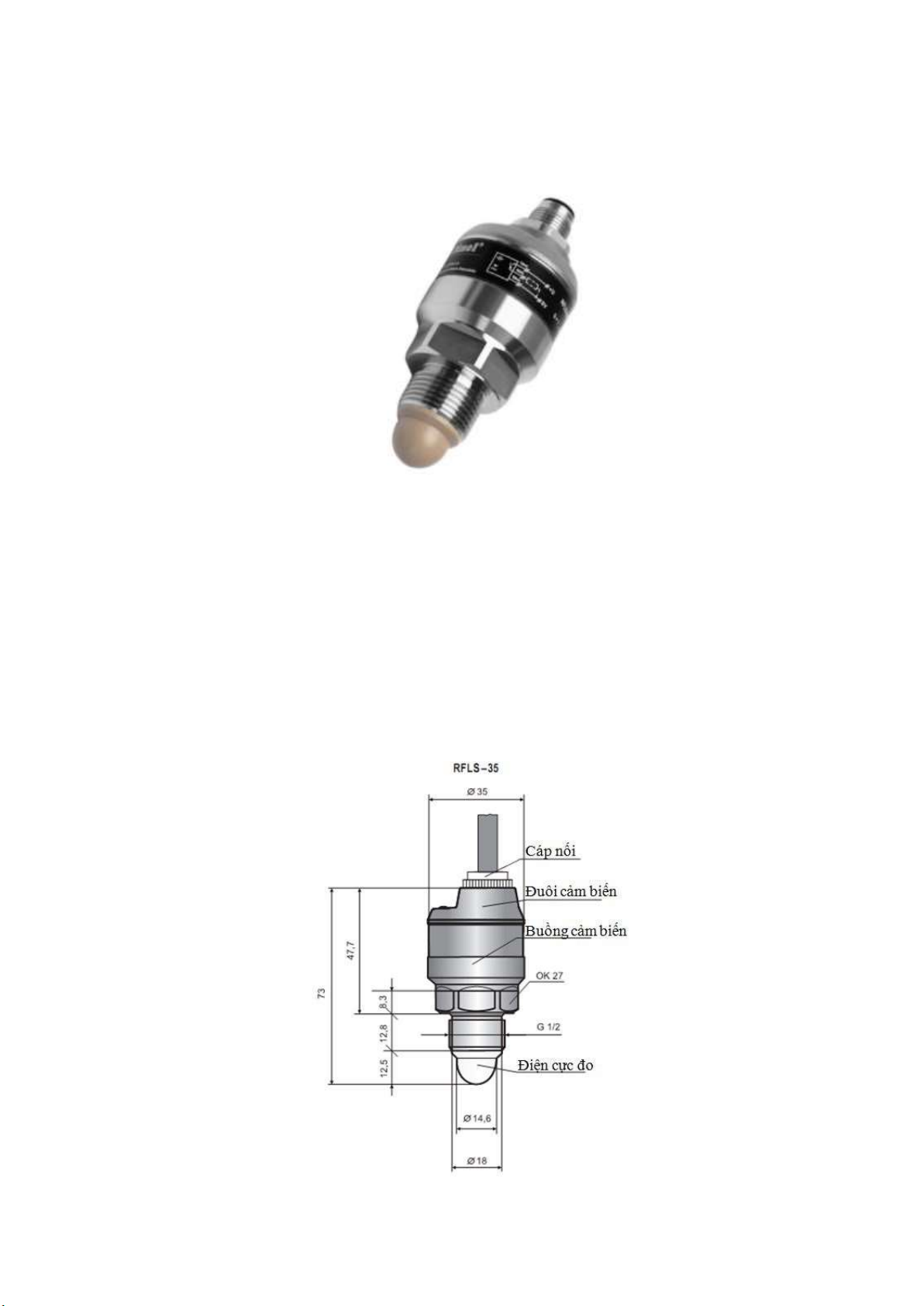
+ Cảm biến báo mức ầy, mức cạn chất kết dính - Keo - Xi Măng (thiết bị còn
có thể o ược các chất rắn dạng hạt) hình 13.31.
Hình 13.31.- Hình ảnh cảm biến báo mức ầy - mức cạn chất kết dính dạng keo - xi măng - bùn.
Đối với các chất có tính kết dính như keo, bùn, xi măng thì chúng ta không
thể dùng cảm biến o mức dạng xoay hay loại iện dung bình thường mà phải dùng
loại ược chế tạo từ vật liệu PTFE hoặc PEEK ể chống ăn mòn, chống kết dính
nhưng vẩn ảm bảo báo mức chính xác. Cảm biến phải hoạt ộng tốt trong môi trường,
nhiệt ộ khoảng 105oC và áp suất lên ến 100bar. Cảm biến vẫn báo mức tốt nhờ cảm
biến phát ra tần số cao hơn cảm biến iện dung.
Cấu tạo cảm biến báo mức chất trong chất kết dính cho trong hình 13.32.
Hình 13.32.- Cấu tạo cảm biến báo mức chất trong chất kết dính lOMoARcPSD| 38777299
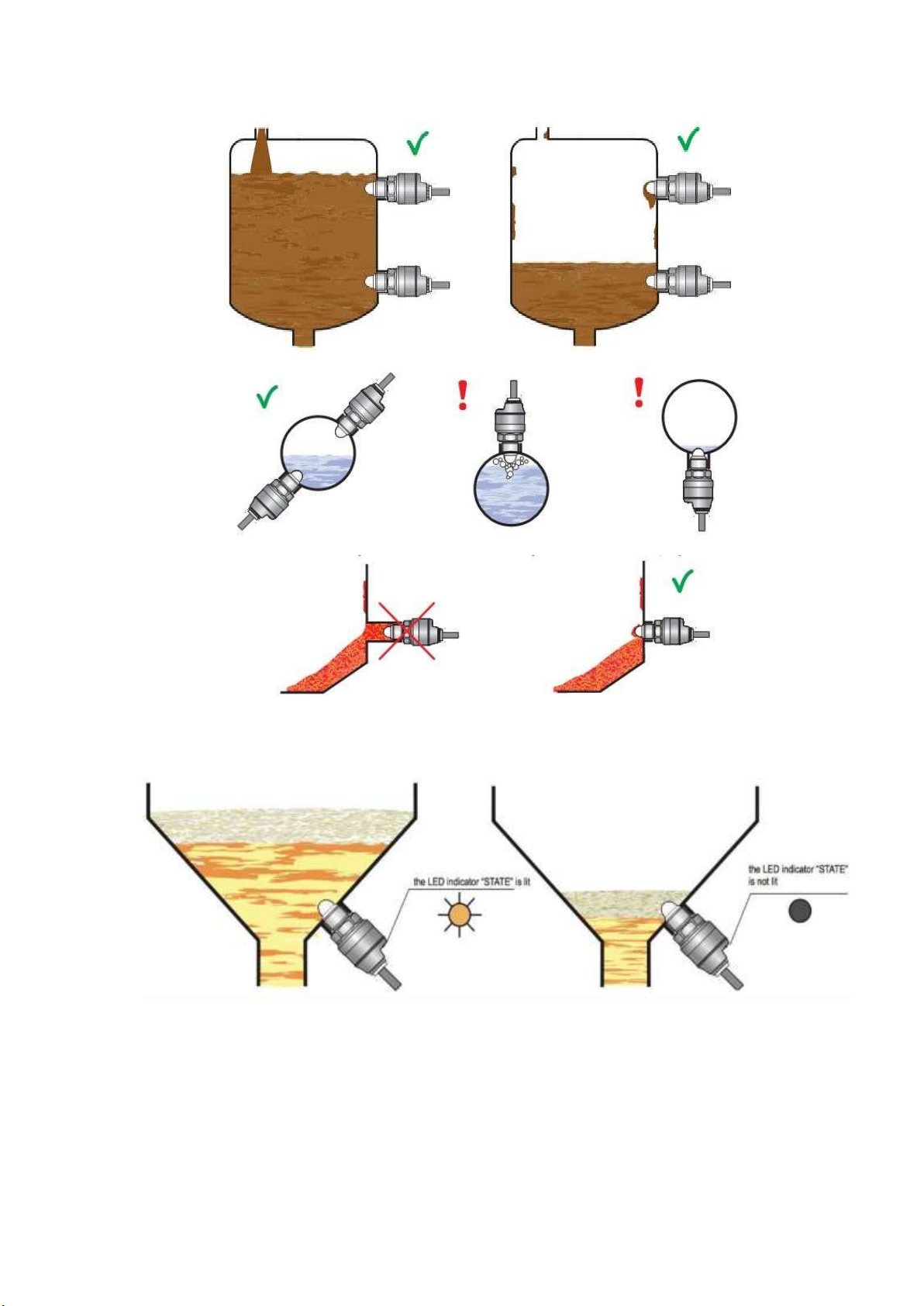
Đối với cảm biến báo mức trong chất kết dính thì cách lắp ăt phải tuyệt ối
chính xác mới ảm bảo cảm biến hoạt ộng tốt nhất.
Hình 13.33.- Cách lắp ặt cảm biến báo mức chất trong chất kết dính.
Do cảm biến báo mức chất kết dính là dạng cảm biến o ON/OFF. Vì thế ngõ
ra của thiết bị giống như một công tắc thông thường. Thiết bị sẽ có hai trạng thái là
óng và ngắt. Trên cảm biến sẽ có èn báo trạng thái và dựa vào ó chúng ta có thể dễ
dàng theo dõi ược thiết bị. lOMoARcPSD| 38777299
Tuy nhiên, ể cảm biến báo mức chất kết dính (RFLS-35N) hoạt ộng ược trước
hết chúng ta cần ấu dây cho chính xác.
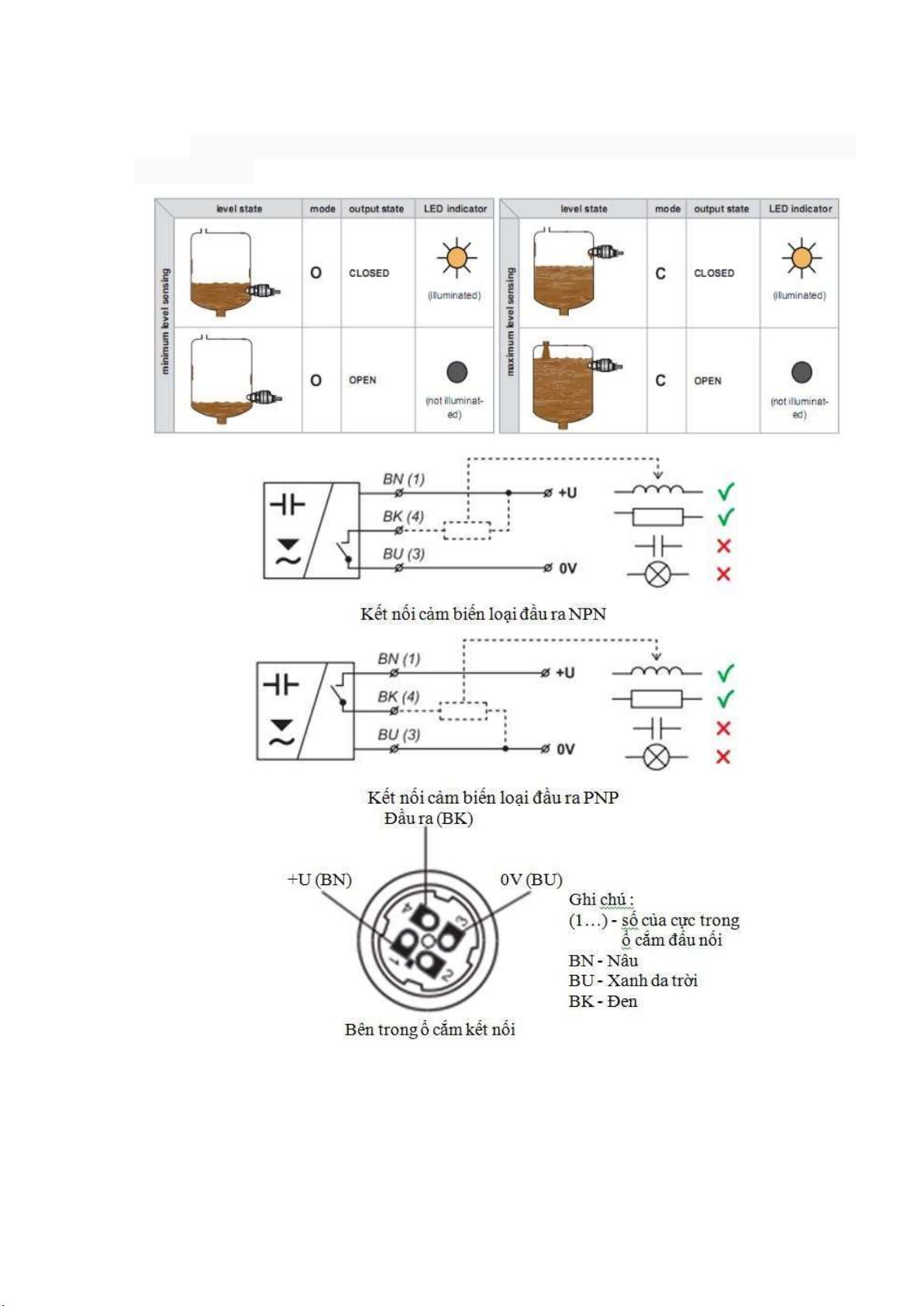
Cách ấu dây tín hiệu ngõ ra cho cảm biến báo mức chất kết dính
( RFLS-35N ) .
Hình 13.34.- Kết nối cảm biến loại ầu ra.
Giống như các cảm biến o On/OFF khác (cảm biến RFLS-35N) cảm biến có
3 dây tín hiệu ược phân biệt bằng màu sắc. Trong ó 2 dây là cấp nguồn cho thiết bị lOMoARcPSD| 38777299
và dây còn lại là dây tín hiệu ngõ ra. Như hình 13.34, chúng ta thấy ược sự khác
nhau giữa ngõ ra dạng PNP và NPN.
Trên thị trường hiện có rất ít hãng sản xuất các loại cảm biến o ON/OFF dành
cho các chất bám dính. Cảm biến báo mức chất kết dính RFLS-35N của Dinel ược
sản xuất tại châu Âu nên có ộ chính xác cao và thời gian áp ứng nhanh. Ngoài ra,
một ưu iểm nữa của thiết bị này chính là có thể iều chỉnh ược ộ nhạy của cảm biến.
Đây ược xem là một iểm ặc biệt giúp giảm sai số tối a cho thiết bị. Tùy thuộc vào
môi chất cần o là gì mà chúng ta chỉnh ộ nhạy cho phù hợp.
Thông thường ối với các bể chứa nhỏ, chúng ta chỉ cần sử dụng hai cảm biến
báo mức chất kết dính RFLS-35N là ủ. Một cảm biến ể báo khi ầy và cái còn lại báo
khi cạn. Tuy nhiên, trên thực tế có thể sử dụng nhiều hơn tùy vào iều kiện thực tế.
Một vài thông số kỹ thuật của cảm biến báo mức chất kết dính RFLS-35N như : . Nguồn cung cấp : 24 VDC . Output : PNP, NPN
. Nhiệt ộ làm việc : - 40...+ 85 oC . Vật liệu : inox 316L
. Vật liệu núm cảm biến : nhựa chống bám dính . Chuẩn bảo vệ : IP68
. Xuất xứ : Dinel - CH SÉC.
2.- Đo mức bằng phương pháp cơ học.
Tương tự như phương pháp o mức dịch bằng phao, nhưng cấu tạo phải có ặc
thù riêng. Ở ây, xác ịnh nhờ vị trí của phao hoặc thanh thăm liệu trên bề mặt vật thể.
Có thể tiến hành o liên tục ể kiểm tra ộ giảm của mức hạt hoặc o gián oạn theo chu kỳ.
a.- Đo liên tục : hình 13.31.
Trong quá trình o, môment quay của ộng cơ sinh ra có chiều ngược lại với
môment do thước thăm liệu sinh ra sẽ tác ộng lên tời quay. Vì thế mà thước thăm
liệu luôn nằm trên bề mặt cốt liệu. Khi bề mặt vật liệu hạ thấp thì thước thăm liệu
ồng thời hạ. Chỉ cần xác ịnh góc quay của tời thì biết ược mức liệu trong bongke.
Việc xác ịnh góc quay của tời quay 4 nhờ con cam 7 và nó sẽ tác ộng lên atríc
pherô inamíc 8 ể chỉ lên mức liệu của bongke.
Trong quá trình o, môment quay của ộng cơ sinh ra có chiều ngược lại với
môment do thước thăm liệu sinh ra sẽ tác ộng lên tời quay. Vì thế mà thước thăm
liệu luôn nằm trên bề mặt cốt liệu. Khi bề mặt vật liệu hạ thấp thì thước thăm liệu
ồng thời hạ. Chỉ cần xác ịnh góc quay của tời thì biết ược mức liệu trong bongke. lOMoARcPSD| 38777299
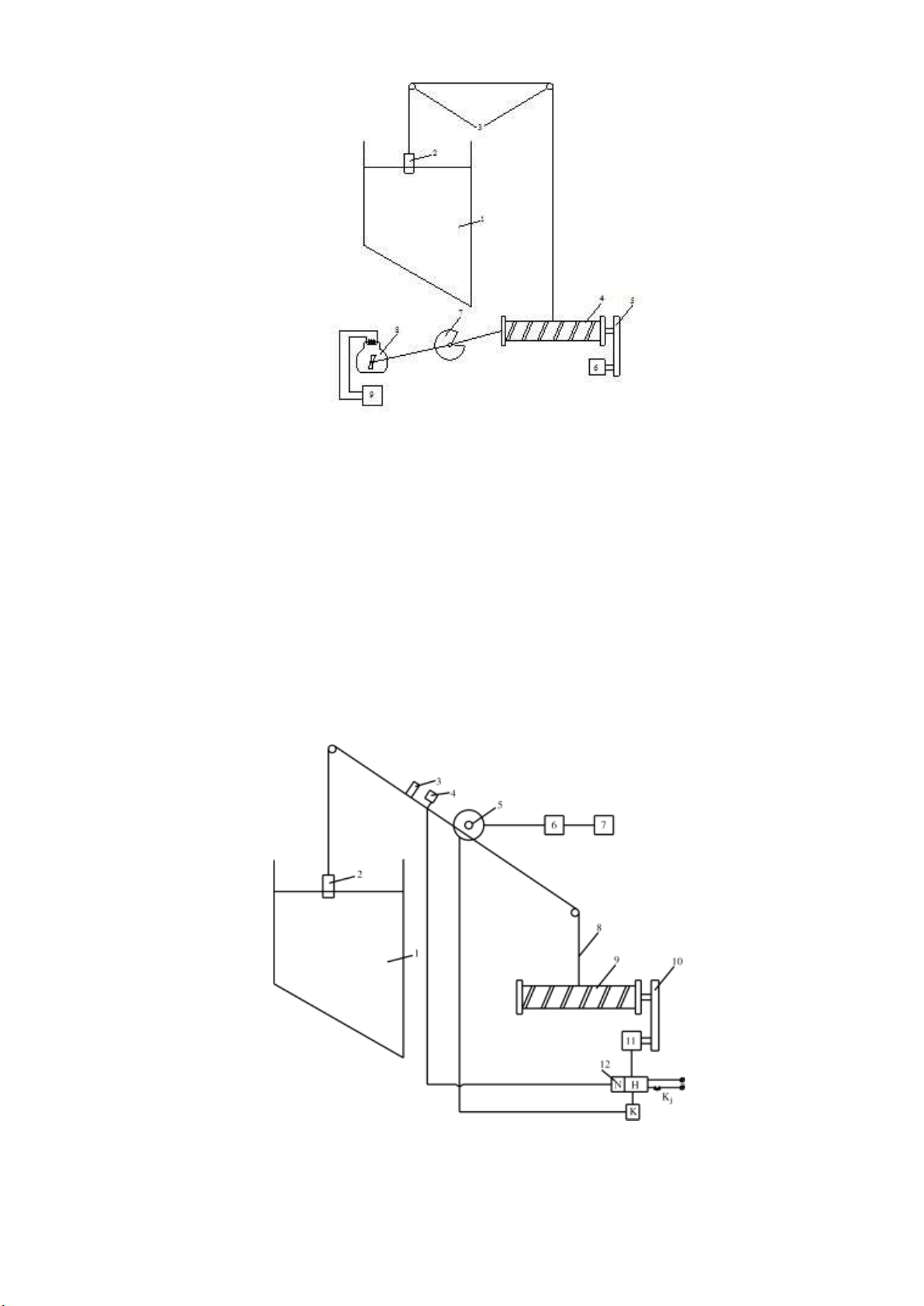
Hình 13.31.- Sơ ồ o mức vật thể hạt liên tục.
1.- Bongke chứa vật thể hạt ; 2.- Thước thăm liệu ; 3.- Ròng rọc ; 4.- Tời quay ; 5.- Hộp số ;
6.- Động cơ ; 7.- Con cam ; 8.- Đatríc pherô inamíc ; 9.- Dụng cụ chỉ thị.
Việc xác ịnh góc quay của tời quay 4 nhờ con cam 7 và nó sẽ tác ộng lên atríc
pherô inamíc 8 ể chỉ lên mức liệu của bongke.
Khi mức liệu giảm ến mức quy ịnh thì thay ổi moment quay của ộng cơ 6 ể
nhấc thước thăm liệu 2 lên.
Có thể thay atríc pherô inamíc bằng biến áp vi sai. b.-
Đo theo chu kỳ : hình 13.32.
Hình 13.32.- Sơ ồ o mức vật thể hạt theo chu kỳ.
1.- Bongke ; 2.- Thước thăm liệu ; 3.- Mốc giới hạn, gắn lên dây tời ; 4.- Công tắc giới hạn ; 5.- Xenxin ;
6.- Bộ phát xung số vòng quay của xenxin ; 7.- Bộ ếm xung (chỉ thị) ; 8.- Dây tời ; 9.- Tời quay ;
10.- Hộp giảm tốc ; 11.- Động cơ ; 12.- Bộ khởi ộng từ, có 2 cuộn dây, dùng ảo chiều quay của ộng cơ. lOMoARcPSD| 38777299
Khi cuộn dây H làm việc, ộng cơ quay theo chiều hạ thước thăm liệu xuống.
Còn khi cuộn dây N làm việc, ộng cơ quay theo chiều nhấc thước thăm liệu lên.
K là hệ thống khóa dòng iện cho cuộn dây hạ H.
Khi hệ thống ở vị trí chưa o, ta óng công tắc Kj , lúc này ộng cơ quay theo
chiều hạ thước thăm liệu xuống, khi ó xenxin cũng quay, nó sẽ phát ra dòng iện ba
pha, ược ưa về khóa K, ộng cơ vẫn tiếp tục quay mặc dù ã thôi ấn nút ấn Kj , tương
ứng cuộn hạ H có iện, ộng cơ quay ể hạ thước thăm liệu, lúc này mốc giới hạn 3 sẽ
tách khỏi công tắc giới hạn 4. Lúc này cuộn nâng N vẫn chưa có iện là do tác ộng của cuộn hạ H.
Khi thước thăm liệu chạm vào bề mặt liệu sẽ làm dây tời trùng, rotor của
xenxin không quay nữa, làm khóa K mất iện, ngắt cuộn hạ H khỏi nguồn, ồng thời
lúc này cuộn nâng N có iện, làm ộng cơ quay theo chiều ngược lại, nâng thước thăm
liệu lên. Khi mốc giới hạn 3 chạm vào công tắc giới hạn 4, sẽ ngắt dòng iện i vào
cuộn nâng N, ộng cơ dừng lại, kết thúc một chu kỳ o.
Thiết bị phát xung 6 sẽ phát xung số vòng quay của xenxin. Số vòng quay này
tỷ lệ với mức liệu có trong bongke 1. dụng cụ ếm xung 7 sẽ chỉ thị mức liệu trong bongke 1.
Đây là chu kỳ o dùng iều chỉnh bằng tay. Khi sử dụng iều chỉnh tự ộng, ặt
thiết bị tự ộng óng công tắc Kj theo từng thời gian của mỗi lần o.
Tài liệu liên quan:
-

Bài tập trắc nghiệm ôn Chương 1: Học phần kỹ thuật đo lường và cảm biến | Trường Đại học Xây Dựng Hà Nội
29 15 -

Chương 9 Đo nhiệt độ | Môn Kỹ thuật cảm biến và đo lường - Đại học Xây Dựng Hà Nội
108 54 -

Lý thuyết bài giảng môn Kỹ thuật cảm biến và đo lường nội dung chương 3: Đo dòng điện và điện áp
436 218 -
Lý thuyết bài giảng môn Kỹ thuật cảm biến và đo lường nội dung chương 5: Đo điện cảm và điện dung
335 168 -

Lý thuyết bài giảng môn Kỹ thuật cảm biến và đo lường nội dung chương 10: Đo độ ẩm
360 180