MIoT Ex10: Hướng dẫn thử nghiệm bộ điều khiển động cơ môn Công nghệ thông tin| Trường Đại học Công nghệ Giao thông vận tải
Chúng tôi cần cung cấp nguồn 5V cho mạch logic của L298N.WChúng tôi sẽ sử dụng thiết bị tích hợp sẵn trên tàu. Bộ điều chỉnh ứng dụng 5V để lấy ứng dụng 5V từ nguồn điện cho động cơ.Vì vậy, hãy giữ nguyên 5V.-EN áo len tại chỗ. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời đọc đón xem!
Môn: Công nghệ thông tin (cntt09) 57 tài liệu
Trường: Trường Đại học Công nghệ Giao thông vận tải 163 tài liệu
Tác giả:

Preview text:
BẢN TẬP 10: IoT HIỆN ĐẠI
1. Cơ sở điều khiển L298N
Chúng ta là chúng tađộng cơ DC có số, còn được gọi là động cơ “TT”, thường được tìm thấy
Trong hai bánh dẫn động robot. Chúng tôi đã đánh giá giá điện áp từ 3 đến 12V.Chúng tôiDo đó sẽ kết n
cấp nguồn 12V bên ngoài cho cực VS. Vì L298N có ứng dụng
giảm khoảng 2VKhi đó, cơ sở sẽ nhận được điện áp 10V và quay với tốc độ vòng quay ít hơn một chút. nhưng đó làđược rồi.
Chúng tôi cần cung cấp nguồn 5V cho mạch logic của L298N. WChúng tôi sẽ sử dụng thiết bị tích hợp s
Bộ điều chỉnh ứng dụng 5V để lấy ứng dụng 5V từ nguồn điện cho động cơ.Vì vậy, hãy giữ nguyên 5V.- tại chỗ.
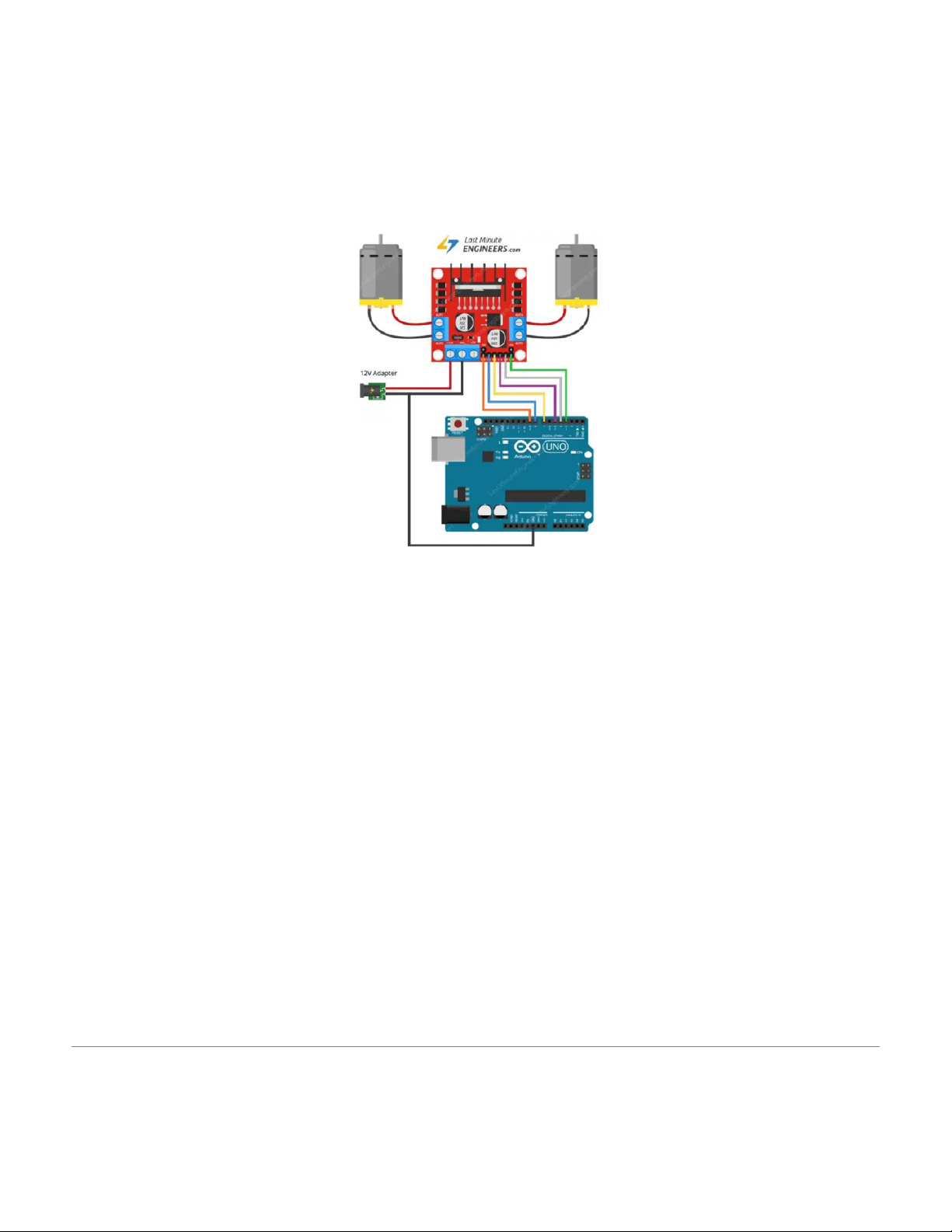
Bây giờ hãy kết nối module L298N.Các đầu vào và kích hoạt chân (ENA, IN1, IN2, IN3, IN4)
và ENB) đến sáu chân đầu ra kỹ thuật số của Arduino (9, 8, 7, 5, 4 và 3). Lưu ý rằng cả hai
Các chân đầu ra 9 và 3 của Arduino đã được kích hoạtPWM.
cuối cùngNối một động cơ vào cực A (OUT1 và OUT2) và động cơ còn lại vào cực B (OUT3 và OUT4). IoT hiện đại Nguyễn Ngọc Lễ 1
- Khai báo các chân Arduino được kết nối với L298N'chân điều hòa s // Kết nối động cơ A int enA = 9; int in1 = 8; int in2 = 7; // Kết nối động cơ B int enB = 3; int in3 = 5; int in4 = 4; - Trong phần không void setup() {
// Đặt tất cả các cơ sở điều khiển chân thành đầu ra Mã số
// Ttắt cơ - Tôithái ban đầu Mã số } - Trong phần mở rộng void loop() { directionControl(); trì hoãn (1000); Điều khiển tốc độ(); trì hoãn (1000); }
- Thực hiện hàm DirectionControl() – Hàm này điều khiển cả hai cơ sở
Nó quay với tốc độ tối đa trong hai giây. Sau đó, nó đảo chiều quay.
của cơ sở và quay trong hai giây. Cuối cùngNó hoàn thành các động cơ.
- Triển khai hàm speedControl() – Hàm này sử dụng analogWrite()
Chức năng tạo ra tín hiệu điều khiển tốc độ cao cả hai động cơ từ trạng thái Yên.
đạt tốc độ tối đa trước khi giảm tốc độ trở về 0. Cuối cùngnó lại hoạt động cơ
- Chúng ta hãy tạo một số phương pháp để điều khiển cơ sở dữ liệu. Các phương pháp này bao gồm
tiến (tốc độ int) lùi (tốc độ int) , sang trái (tốc độ int) , , true(int speed) và stop()
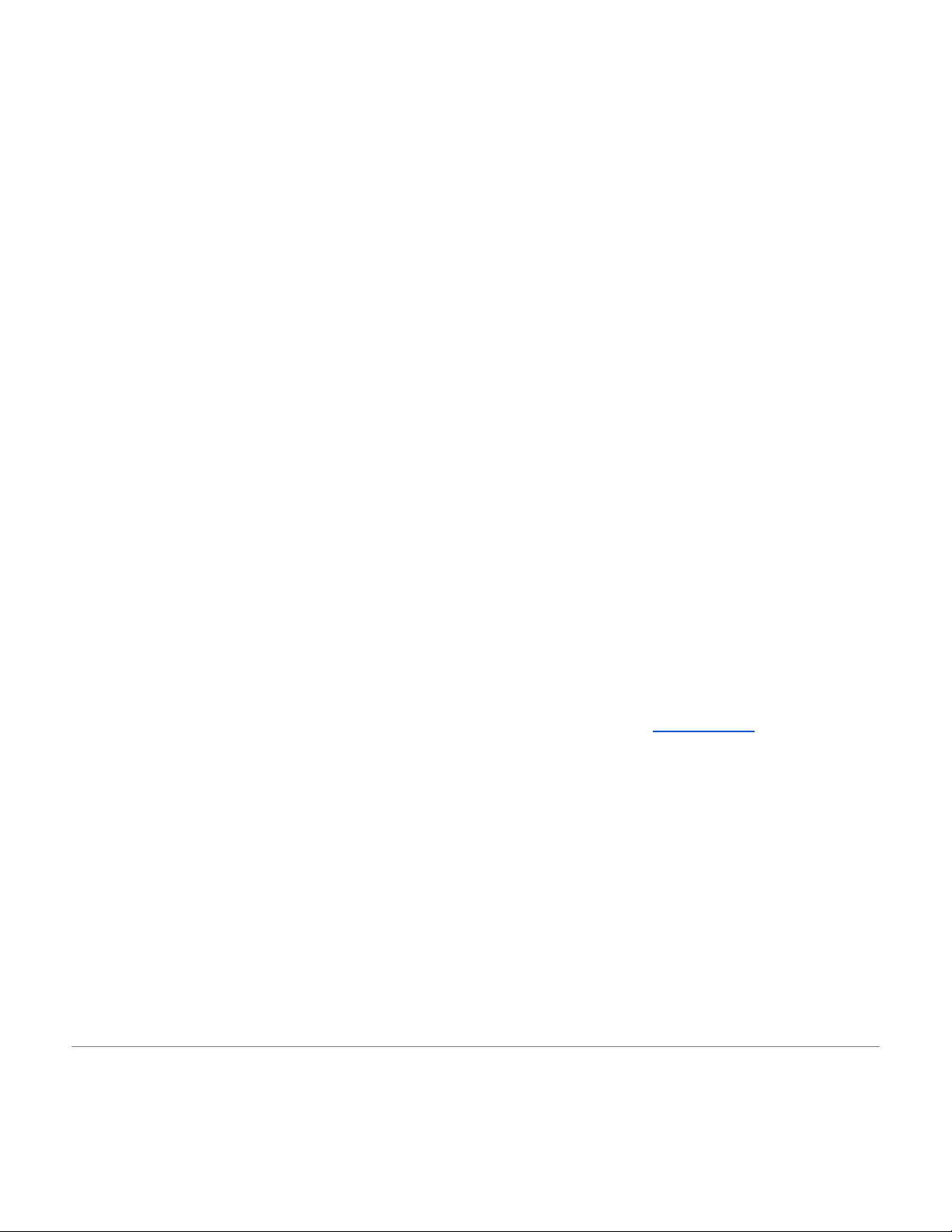
2. Sơ đồ dây Raspberry Pi L298N IoT hiện đại Nguyễn Ngọc Lễ 2
Đối với ứng dụng này, bạn sẽ kết nối các tín hiệu chân L298N như sau: L298N ENA sang GPIO18 L298N IN1 sang GPIO4 L298N IN2 GPIO17 L298N IN3 sang GPIO27 L298N IN4 sang GPIO22 L298N ENB sang GPIO12
YBạn sẽ cung cấp nguồn cho Raspberry Pi bằng bộ pin 5V 2A.
Hãy phát triển ứng dụng này với các chức năng như trên.
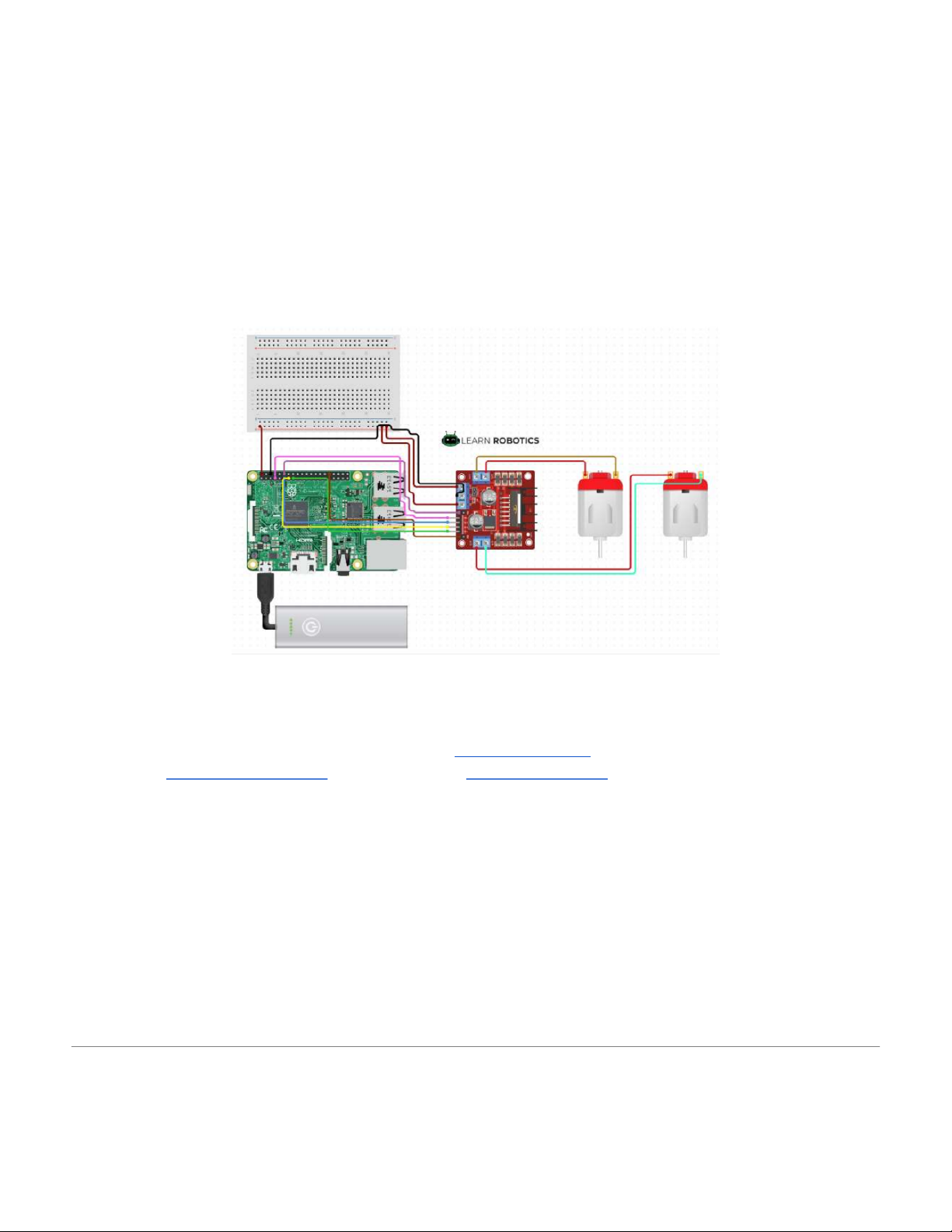
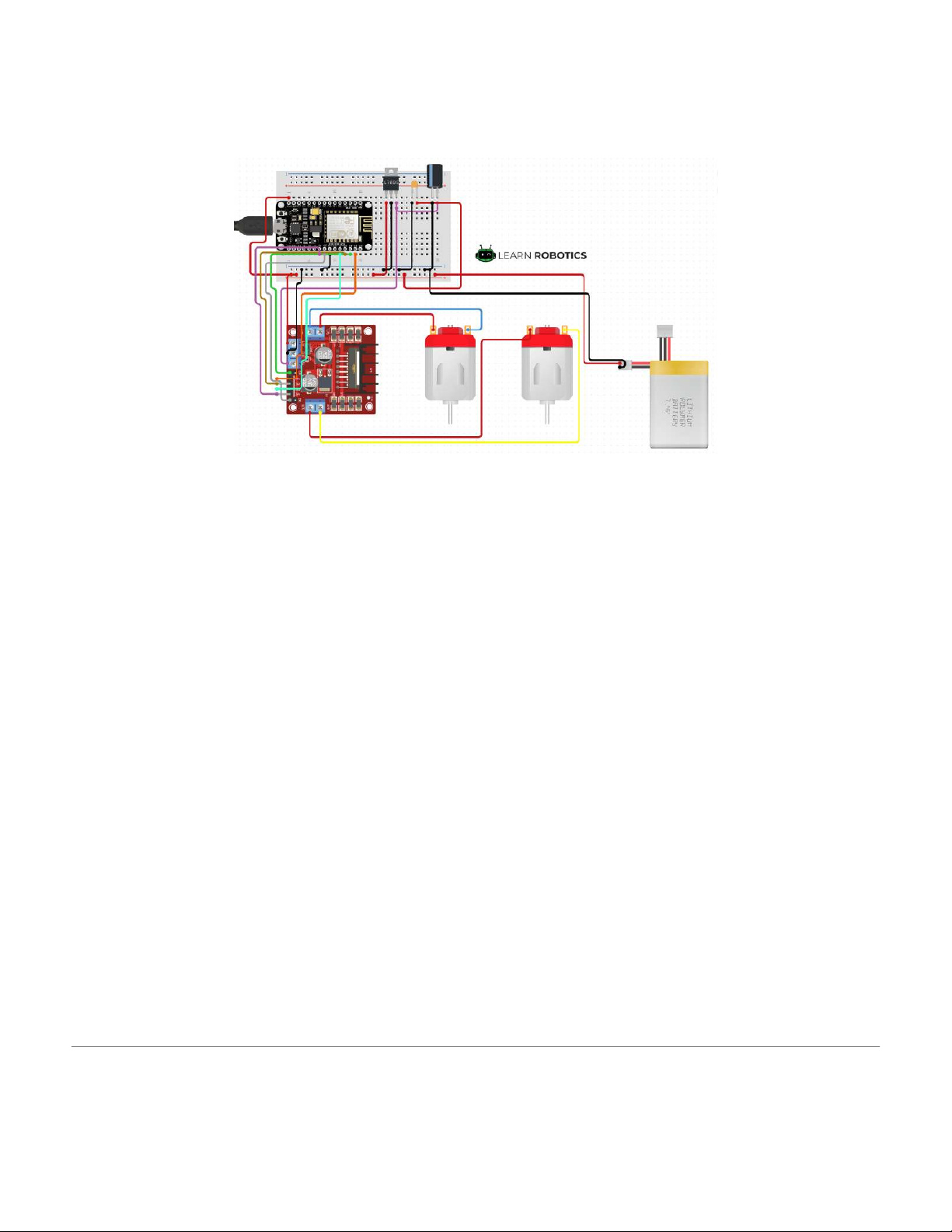
3. Sơ đồ dây chuyền NodeMCU ESP32 L298N
NodeMCU yêu cầu thêm một ứng dụng V.Bộ điều chỉnh điện áp (L7805 – 5V 1.5A), một
Phân điện (1uF/50V) và điện tử (100nF – 0603).
Các chân tín hiệu giữa NodeMCU và L298N được bố trí như sau: L298N ENA sang D2 L298N IN1 D1 L298N IN2 D3 L298N IN3 D4 IoT hiện đại Nguyễn Ngọc Lễ 3 L298N IN4 D6 L298N ENB D5
Hãy phát triển ứng dụng này với các chức năng như trên.
Tài liệu YCác thí nghiệm của chúng tôi:
YBáo cáo thí nghiệm của chúng tôi phải bao gồm:
❖ Mô tả tổng quan về thí nghiệm của bạn.
❖ Mô tả từng bước chi tiết để bạn cùng lớp có thể làm lại.
❖ Dữ liệu từ thí nghiệm của bạn.
❖ Đáp án cho các câu hỏi thí nghiệm.
❖ Giải thích kết quả của bạn. IoT hiện đại Nguyễn Ngọc Lễ 4
Tài liệu liên quan:
-

Bài tập thiết kế môn Công nghệ thông tin| Trường Đại học Công nghệ Giao thông vận tải
9 5 -

Hướng dẫn sài gòn powerdesigner môn Công nghệ thông tin| Trường Đại học Công nghệ Giao thông vận tải
8 4 -
Báo cáo 2: Phân tích liệu liệu và kết quả Nghiên cứu cứu môn Công nghệ thông tin| Trường Đại học Công nghệ Giao thông vận tải
8 4 -

Tài liệu code đơn giản môn Công nghệ thông tin| Trường Đại học Công nghệ Giao thông vận tải
9 5 -

Thực hành Bảo vệ an toàn máy tính môn Công nghệ thông tin| Trường Đại học Công nghệ Giao thông vận tải
8 4