Tài liệu ôn tập về Kit MSP430G2553 và các linh kiện khác - Cấu trúc máy tính và vi xử lí | Đại học Bách Khoa, Đại học Đà Nẵng
Tài liệu ôn tập về Kit MSP430G2553 và các linh kiện khác - Cấu trúc máy tính và vi xử lí | Đại học Bách Khoa, Đại học Đà Nẵng giúp sinh viên tham khảo, ôn luyện và phục vụ nhu cầu học tập của mình cụ thể là có định hướng, ôn tập, nắm vững kiến thức môn học và làm bài tốt trong những bài kiểm tra, bài tiểu luận, bài tập kết thúc học phần, từ đó học tập tốt và có kết quả cao cũng như có thể vận dụng tốt những kiến thức mình đã họca
Môn: Cấu trúc máy tính và vi xử lí 31 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:














Preview text:
MỤC LỤC
LỜI NÓI ĐẦU.......................................................................................................2
BẢNG PHÂN CHIA NHIỆM VỤ........................................................................3
CHƯƠNG 1: GIỚI THIỆU ĐỀ TÀI VÀ TÍNH CẤP THIẾT..............................4
1. Giới thiệu đề tài:...........................................................................................4
2. Tính cấp thiết của đề tài................................................................................4
3. Sơ đồ khối:....................................................................................................5
CHƯƠNG 2: GIỚI THIỆU VỀ KIT MSP430G2553 VÀ CÁC LINH KIỆN
KHÁC....................................................................................................................6
1. Sơ lược về MCU MSP430G2553.................................................................6
2. Module bàn phím:.........................................................................................9
3. Bộ cảm biến độ ẩm đất:..............................................................................10
4. Module Relay 1 kênh 5V-220VAC10A (cách ly quang):..........................12
5. Máy bơm nước:...........................................................................................12
CHƯƠNG 3: THIẾT KẾ HỆ THỐNG...............................................................14
1. Sơ đồ nguyên lý:.........................................................................................14
2. Lưu đồ giải thuật.........................................................................................15
3. Chương trình chính.....................................................................................16
4. Kết quả chạy thử phần mềm.......................................................................19
5. Thiết kế sản phẩm.......................................................................................19
6. Demo thử nghiệm và kết quả đạt được.......................................................21
7. Hướng phát triển.........................................................................................21
TÀI LIỆU THAM KHẢO...................................................................................21 1 LỜI NÓI ĐẦU
Trong thế giới hiện đại ngày nay, việc quản lý nước và bảo vệ môi trường
trở thành những vấn đề quan trọng. Đặc biệt, việc duy trì và chăm sóc các khu
vườn, cây cối và vùng xanh đô thị đòi hỏi sự tiếp cận thông minh và hiệu quả.
Thiết bị tưới cây tự độngdùng vi điều khiển sẽ là ưu tiên của chúng ta.
Trong đó, việc sử dụng MSP430G2553 là một giải pháp hiện đại và tiên tiến
nhằm tối ưu hóa việc tưới cây trong các khu vườn, sân vườn, và các khu đô thị.
Với sự kết hợp của công nghệ vi điều khiển MSP430G2553 và các cảm biến, hệ
thống này mang lại khả năng theo dõi và điều chỉnh tự động lượng nước cần
thiết cho từng cây cối, giúp tiết kiệm nước và tăng cường sự phát triển của cây trồng.
Trên cơ sở kiến thức đã được học: Tin học đại cương, Kỹ thuật mạch điện
tử, Kỹ thuật vi xử lý, …cùng với sự hiểu biết về các thiết bị điện tử, nhóm chúng
em đã quyết định thực hiện đề tài: Thiết bị tưới cây tự động.
Nhóm chúng em xin dành gởi tình cảm chân thành của nhóm đến thầy Hồ
Viết Việt đã giảng dạy những kiến thức hữu ích và những bài học hay trong học
phần này. Xuyên suốt thời gian làm việc, chúng em không những học được
nhiều kiến thức bổ ích mà còn được học tinh thần làm việc nhóm và trách nhiệm
của bản thân được nâng cao hơn.
Cảm ơn sự giúp đỡ của Thầy và một điều là chúng em chắc rằng đồ án
này cũng không tránh khỏi những thiếu sót trong khi làm cũng như trong suốt
quá trình chúng em thực hiện đồ án này, chúng em rất cảm ơn khi nhận được
những ý kiến đóng góp của thầy và cùng với tất cả các bạn để nhóm chúng em
ngày càng hoàn thiện hơn.
Nhóm chúng em xin chân thành cảm ơn mọi người ! 2
BẢNG PHÂN CHIA NHIỆM VỤ STT Tên SVTH Nhiệm vụ 1 Hồ Thị Ánh Tâm
Tìm hiểu về ghép hàm main. Thiết kế PowerPoint 2 Nguyễn Đăng Quý
Tìm hiểu về báo cáo, cách đi dây linh kiện Thiết kế PowerPoint 3 Phan Văn Cơ
Tìm hiểu về hàm điều khiển Relay Làm báo cáo 4 Lê Công Luận
Tìm hiểu, thiết kế nguồn cho hệ thống Làm báo cáo 5 Đăng Văn Hòa
Tìm hiểu về đọc giá trị độ ẩm cảm biến Làm báo cáo
Tất cả các thành viên đều tham gia quá trình nghiên cứu, thiết kế, chỉnh sửa và
chạy thử hệ thống trong suốt thời gian làm đề tài. 3
CHƯƠNG 1: GIỚI THIỆU ĐỀ TÀI VÀ TÍNH CẤP THIẾT
1. Giới thiệu đề tài: ‐
Độ ẩm được đánh giá là một trong những yếu tố quan trọng nhất đối với sự sinh
trưởng của cây trồng. Độ ẩm ảnh hưởng trực tiếp đến quá trình sản xuất năng
lượng (cacbonhydrat) ở rễ, ảnh hưởng đến sự phát triển của rễ, ảnh hưởng đến sự
hấp thu dinh dưỡng của cây, ảnh dưởng đến vi sinh vật và ảnh hưởng đến cả
lượng không khí trong đất. Độ ẩm của đất là lượng nước được giữ trong khoảng
không giữa các hạt đất. Độ ẩm quá thấp hoặc quá cao đều ảnh hưởng đến sự sinh
trưởng và phát triển của cây trồng. Độ ẩm thích hợp cho các loại cây trồng dao
động trong khoảng từ 60% – 70%. ‐
Thiết bị tưới cây tự động đang trở thành một giải pháp ngày càng phổ biến và
hiệu quả cho việc duy trì và chăm sóc cây cối trong các khu vườn, công viên,
trang trại và khu đô thị. Với sự phát triển của công nghệ, việc áp dụng thiết bị
tưới cây tự độngmang lại nhiều lợi ích đáng kể. Chính vì vậy từ những nhu cầu
và điều kiện trên chúng em quyết định chọn đề tài: Thiết bị tưới cây tự động.
2. Tính cấp thiết của đề tài
Thiết bị tưới cây tự độngcó tính cấp thiết cao trong cả quy mô lớn và quy mô nhỏ.
Dưới đây là 1 số lý do:
- Tiết kiệm nước: Thiết bị tưới cây tự độngđược thiết kế để cung cấp đúng
lượng nước cần thiết cho cây trồng mà không lãng phí. Nó sử dụng cảm biến độ
ẩm đất và các thiết bị điều khiển để điều chỉnh lượng nước tưới dựa trên nhu
cầu thực tế của cây. Điều này giúp giảm nguy cơ lãng phí nước và tiết kiệm tài nguyên quý báu này.
- Tăng năng suất và chất lượng cây trồng: Thiết bị tưới cây tự độngđảm bảo
rằng cây trồng nhận được lượng nước và chất dinh dưỡng phù hợp theo đúng
lịch trình. Việc cung cấp nước và chăm sóc đúng giúp cây phát triển tốt hơn,
tăng năng suất và chất lượng của sản phẩm.
- Tiện lợi và tiết kiệm thời gian: Với hệ thống tưới cây tự động, không cần phải
tưới cây thủ công một cách định kỳ. Người dùng có thể thiết lập lịch trình tưới
cây và hệ thống sẽ tự động hoạt động theo đúng lịch trình đó. Điều này giúp tiết
kiệm thời gian và công sức cho người trồng cây, đặc biệt là trong quy mô lớn.
- Đáng tin cậy và chính xác: Thiết bị tưới cây tự độngsử dụng các cảm biến và
thiết bị điều khiển hiện đại để đo lường, theo dõi và điều chỉnh lượng nước tưới.
Nó có khả năng phát hiện các điều kiện môi trường như độ ẩm, nhiệt độ và ánh
sáng một cách chính xác, từ đó đưa ra quyết định tưới cây hợp lý. Điều này đảm
bảo rằng cây trồng được cung cấp nước đúng lượng và đúng thời điểm.
Trong đề tài lần này, nhóm chúng em xin được trình bày về thiết bị tưới cây tự
độngở phạm vi nhỏ, cụ thể với đối tượng là cây cảnh trong nhà. Như chúng ta đã biết,
cây cảnh thường được nhiều người đam mê và là thú vui tiêu khiển. Chúng thường 4
được đặt ở những nơi có nhiều ánh sáng để phát triển, ví dụ như là ở ban công, sân
nhà. Sẽ rất bình thường nếu ngày nào chúng ta cũng chăm sóc tưới cây thì nó sẽ phát
triển tốt, không bị héo hay hư hại. Nhưng trong những trường hợp chúng ta quên hoặc
thời tiết nắng nóng, khô khan thì cây sẽ bị thiếu nước nhanh chóng khô héo, dẫn đến
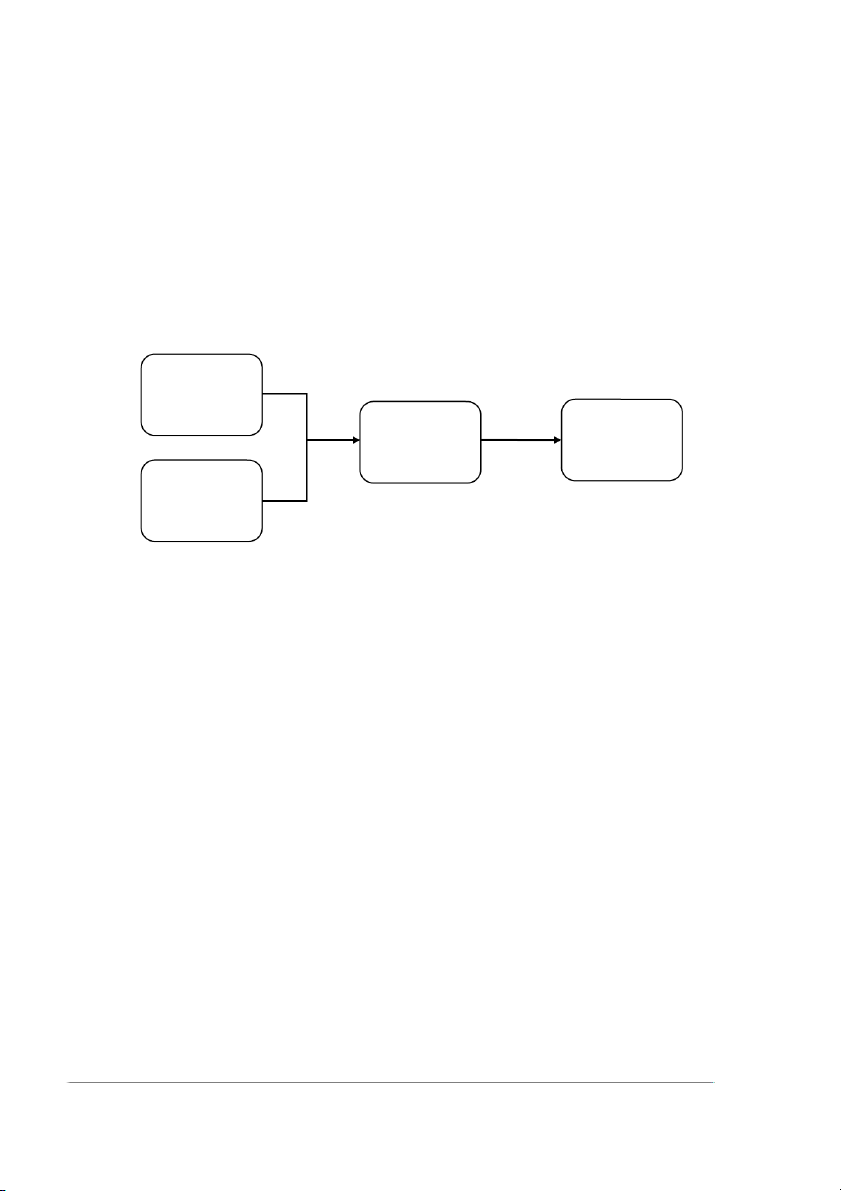
cây sẽ chết. Việc sử dụng thiết bị tưới cây tự độngsẽ giải quyết được những vấn đề trên. 3. Sơ đồ khối: Khối cảm biến độ ẩm đất Khối điều Khối xử lí khiển động cơ Khối bàn phím
Hình 1: Sơ đồ khối của hệ thống. 5
CHƯƠNG 2: GIỚI THIỆU VỀ KIT MSP430G2553 VÀ CÁC LINH KIỆN KHÁC
1. Sơ lược về MCU MSP430G2553
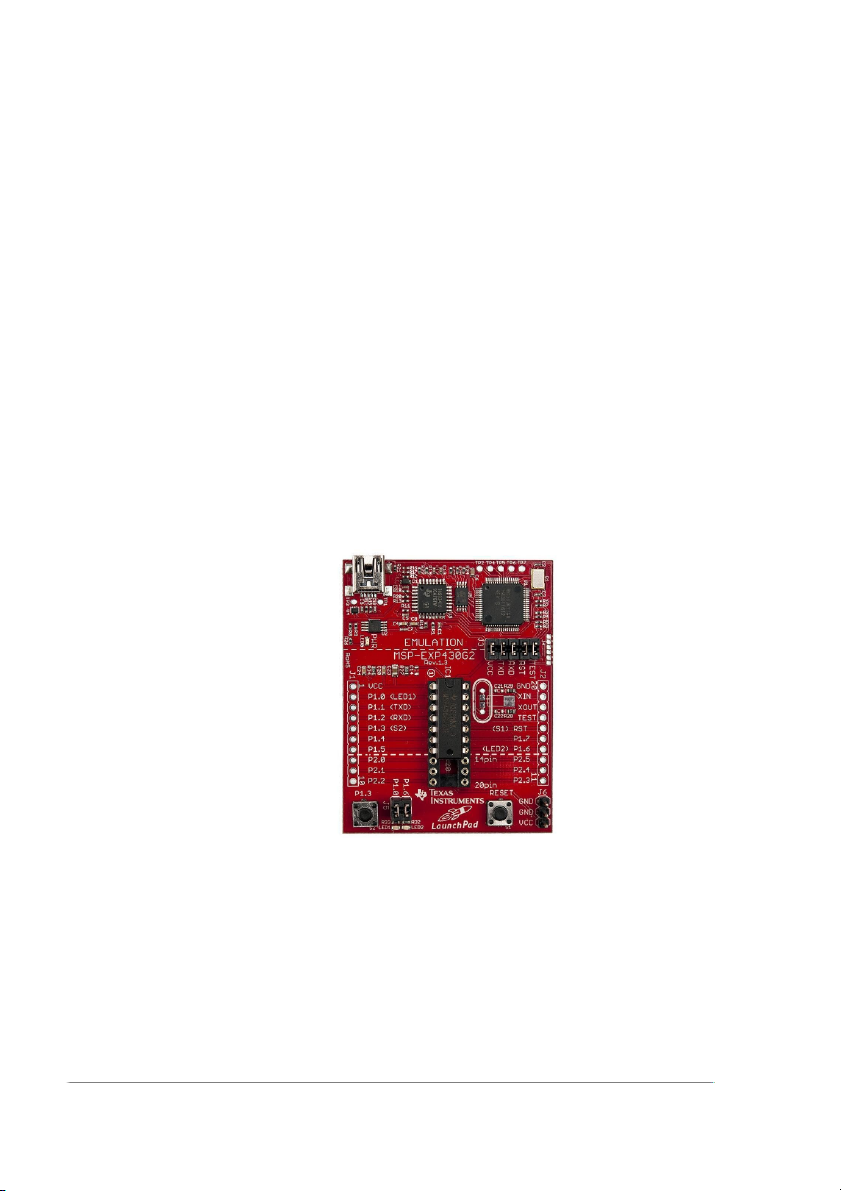
1.1. Vi điều khiển MSP430G2553: ‐
KIT MSP-EXP430G2 được phát triển bởi Texas Instruments hỗ trợ các dòng vi
điều khiển MSP430G2xx. LaunchPad hỗ trợ cổng kết nối USB, 20 chân DIP
socket. Nó là một công cụ hỗ trợ cho nạp code cũng như đánh giá và gỡ lỗi dễ dàng hơn. ‐
Một Kit LaunchPad gồm hai thành phần, với GND được phủ chung:
+ Nửa trên: (Embedded Emulation ) là phần mạch nạp theo chuẩn spy-bi-wire
Jtag (2 dây), kết hợp với chuyển đổi giao tiếp UART với máy tính. Trên cùng là
đầu USB mini để nối với máy tính.
+ Nửa dưới là hàng Header để nối ra đối tượng cần giao tiếp, bao gồm các chân:
TXD, RXD: phục vụ giao tiếp UART với máy tính.
RST, TEST: phục vụ nạp và debug (sửa lỗi) theo chuẩn spy-bi-wire Jtag.
VCC: cấp nguồn 3.3V cho đối tượng (thường là nửa dưới LaunchPad). Hình 2.1: MCU MSP430G2553.
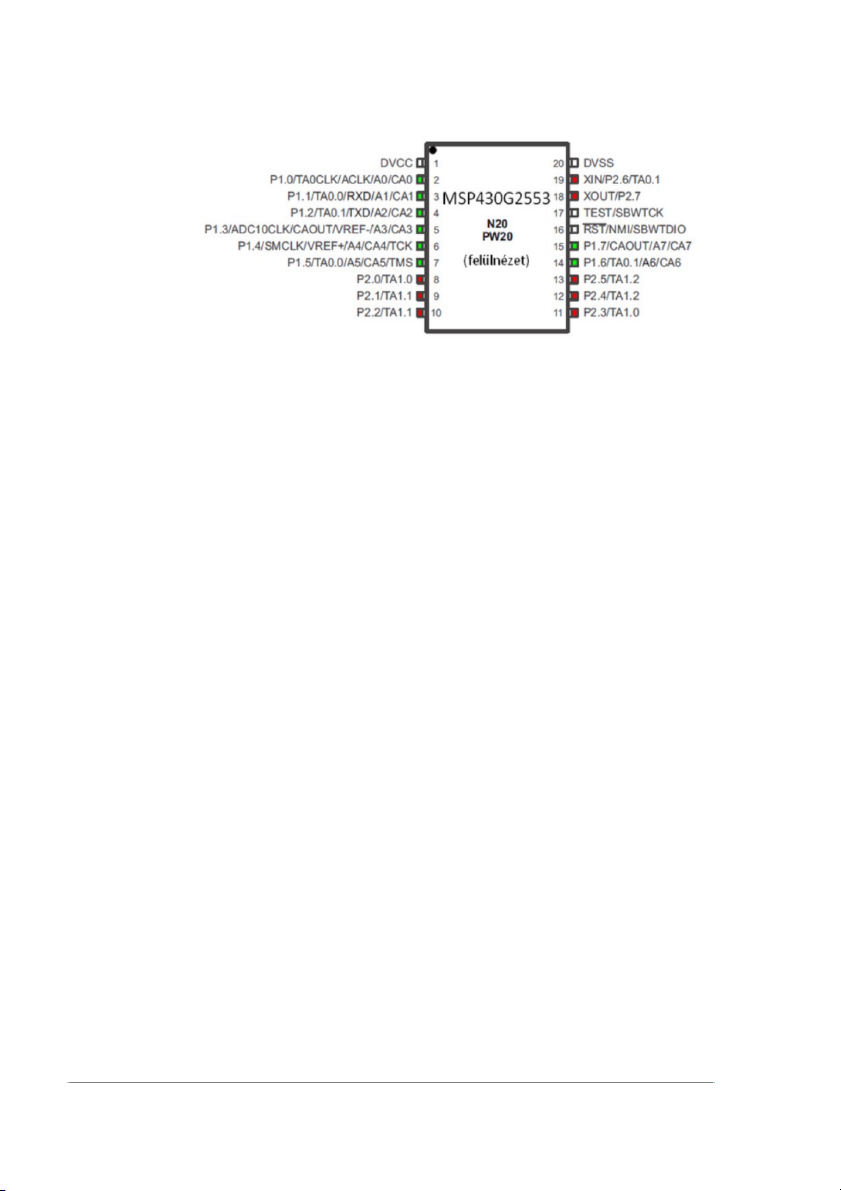
1.2. Sơ đồ chân của MSP430G2553:
Chip MSP430 có kích thước nhỏ gọn , chỉ với 20 chân đối với kiểu chân DIP.
Bao gồm 2 port I/O (hay GPIO general purprose input/ output : cổng nhập xuất chung). 6
Hình 2.3: Sơ đồ chân của MSP430G2553.
Port 1 : có 8 chân từ P1.0 đến P1.7 tương ứng với các chân từ 2-7 và 14 , 15.
Port 2 : cũng gồm có 8 chân P2.0 – P2.7 ứng với các chân 8 – 13 , 18,19.
1.3. Giải thích sơ lược các chân: ‐
Chân 1 (Vcc): nguồn cấp cho chip chỉ được ở mức 3.3V, nếu cấp nguồn cao quá
mức này thì chip có thể hoạt động sai hay cháy chip. ‐
Chân 20: nối cực âm (0V). ‐
Chân 16 (RST): khởi động lại vi điều khiển. ‐
Chân 17 (TEST): khởi động chế độ kiểm tra và hiệu chuẩn. ‐
P1.0 – P1.7 (Port 1): các chân này có thể được cấu hình là input hoặc output, và
có khả năng điều khiển độ cao thấp với điện áp 3.3V (tương đương với điện áp
nguồn của vi điều khiển). ‐
P2.0 – P2.7 (Port 2): cấu hình là input hoặc output và điểu khiển độ cao thấp với điện áp 3.3V.
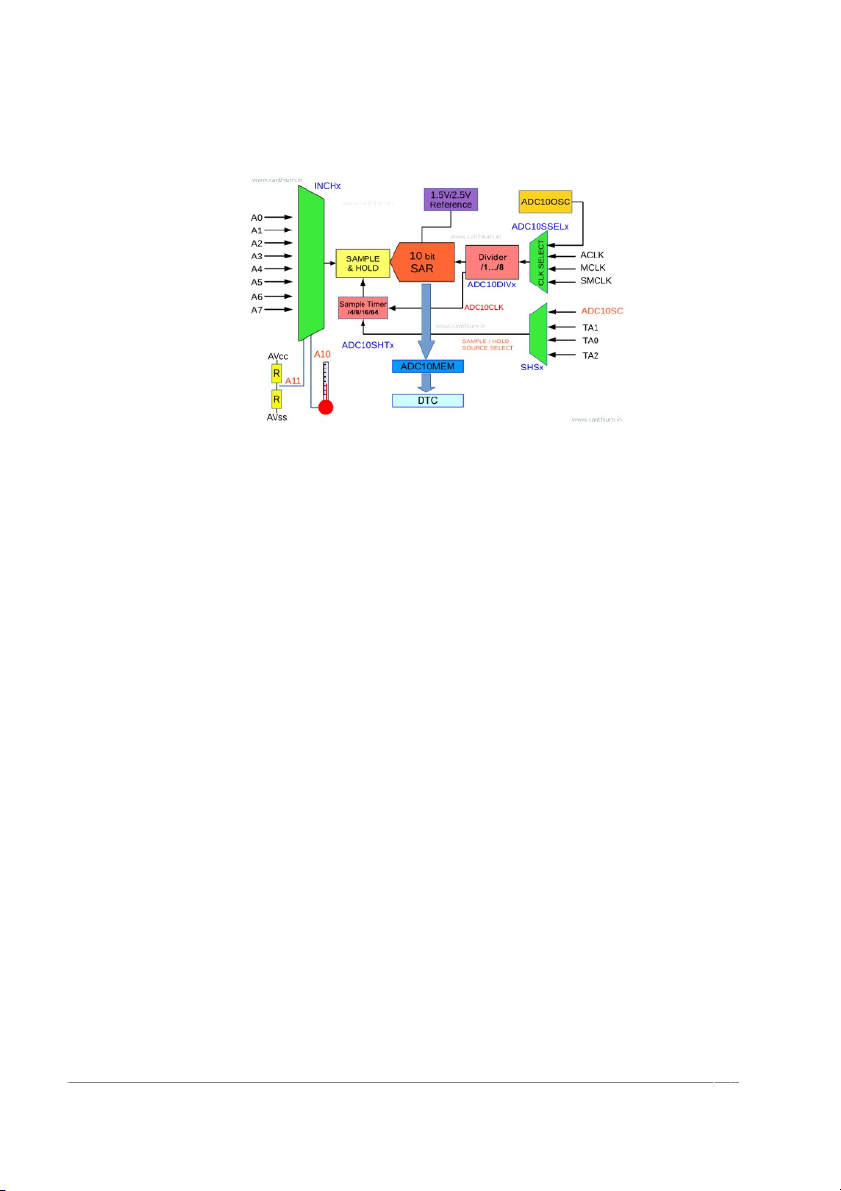
1.4. Hoạt động của bộ chuyển đổi ADC10 : ‐
ADC là từ viết tắt của Analog to Digital Converter hay bộ chuyển đổi analog
sang kỹ thuật số là một mạch chuyển đổi giá trị điện áp liên tục (analog) sang giá
trị nhị phân (kỹ thuật số) mà thiết bị kỹ thuật số có thể hiểu được sau đó có thể
được sử dụng để tính toán kỹ thuật số. ‐
Kênh ADC10 chuyển đổi một tín hiệu tương tự sang tín hiệu số có độ dài 10 bit,
kết quả chuyển đổi được lưu vào thanh ghi ADC10MEM. Bộ chuyển đổi ADC10
được điều khiển bởi 2 thanh ghi ADC10CTL0 và ADC10CTL1 ADC10ON là bit cho phép chuyển đổi. ‐ Các tính năng của ADC10
+ ADC 10 bit tốc độ lấy mẫu 200ksps.
+ Chọn điện áp tham chiếu 1,5V hoặc 2,5V VCC hay điện áp tham chiếu ngoài.
+ 8 kênh chuyển đổi , kênh cảm biến nhiệt độ bên trong chip. 7
+ Chuyển đổi đơn kênh,lặp 1 kênh,trình tự,lặp đi lặp lại.
+ Tự động truyền dữ liệu vào bộ nhớ.
Hình 2.4: Hoạt động của bộ chuyển đổi ADC10. 1.5. GPIO: ‐
GPIO là viết tắt của General Purpose Input Output. Tín hiệu trên các chân GPIO
cho phép chúng ta đạt được chức năng cuối của mình và cho phép chúng ta nói
chuyện với thế giới bên ngoài. ‐
Nếu chúng ta cấu hình chân như một đầu ra, chúng ta có thể ghi 0 (LOW) hoặc
3,3/ 5 V (VDD) vào chân đó. Khi được cấu hình làm đầu vào, chúng ta có thể
đọc tín hiệu trên chân đó. ‐
Một số thanh ghi thường được sử dụng:
+ Direction Register PxDIR (P1DIR, P2DIR): Đây là các thanh ghi 8 bit điều
khiển chiều của 8 chân port. P1DIR điều khiển PORT1, P2DIR điều khiển PORT2.
Bit = 1: Chân PORT tương ứng được cấu hình thành output
Bit = 0: Chân PORT tương ứng được cấu hình thành input
+ Input Register (PxIN): Đây là các thanh ghi 8 bit chứa giá trị đọc được từ các chân PORT.
Bit = 1: Chân PORT tương ứng ở mức cao
Bit = 0: Chân PORT tương ứng ở mức thấp.
+ Output Register (PxOUT): Đây là thanh ghi điều khiển ngõ ra của các PORT.
Bit = 1: Xuất mức cao ra chân PORT tương ứng.
Bit = 0: Xuất mức thấp ra chân PORT tương ứng.
+ Function Select Register: Đây là thanh ghi chọn chức năng cho chân PORT.
Mỗi chân PORT có thể cấu hình chọn chức năng Input/Output hay là chức năng đặc biệt khác.
Bit = 1: Chọn chức năng đặc biệt.
Bit = 0: Chọn chức năng GPIO. 8 2. Module bàn phím:
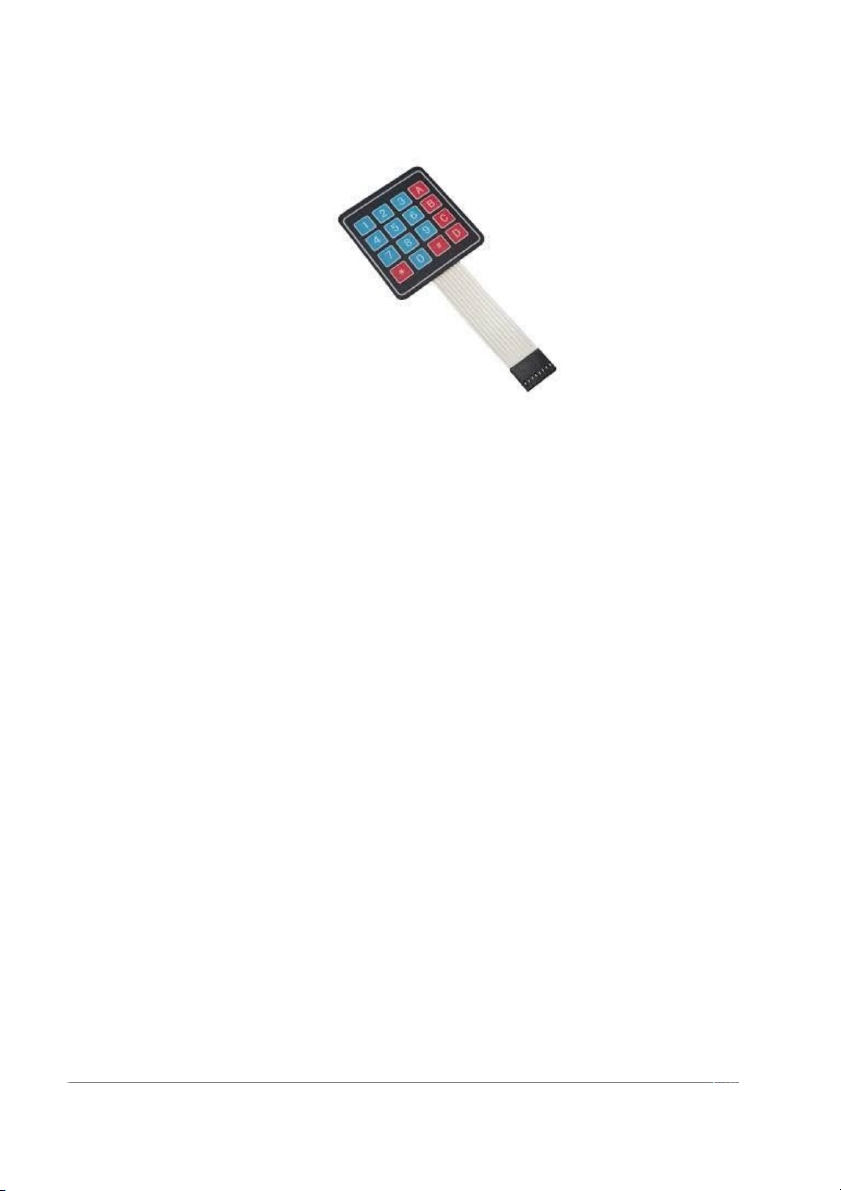
Hình 2.5: Module bàn phím 4x4. 2.1. Mô tả: ‐
Các nút nhấn trên bàn phím được sắp xếp theo hàng và cột. Bàn phím 3x4 có 4
hàng và 3 cột, bàn phím 4x4 có 4 hàng và 4 cột. ‐
Bên dưới mỗi phím là một màng công tắc. Mỗi công tắc trong một hàng được kết
nối với các công tắc khác trong hàng bằng một đường dẫn điện bên dưới miếng
đệm. Mỗi công tắc trong một cột được kết nối theo cùng một cách - một bên của
công tắc được kết nối với tất cả các công tắc khác trong cột đó bằng một đường
dẫn điện. Mỗi hàng và cột được đưa ra một chân duy nhất, có tất cả 8 chân đối với bàn phím 4x4.
Hình 2.6: Module bàn phím 4x4. 9 ‐
Bàn phím mềm 4x4 keypad có thiết kế nhỏ gọn, dễ kết nối và sử dụng, các chân
của 16 phím được nối theo ma trận, tín hiệu khi nhấn phím sẽ là tín hiệu GND
(0VDC) hoặc Vcc (5VDC) tùy vào cách quét phím của các bạn kích vào chân Vi
điều khiển, bàn phím còn tích hợp vị trí để lắp thêm tụ chống dội (chống nhiễu),
phù hợp cho các ứng dụng điều khiển bằng phím bấm. 2.2. Thông số: ‐
Module bàn phím ma trận 4x4 loại phím mềm. ‐ Độ dài cáp: 88mm ‐
Nhiệt độ hoạt động: 0 ~ 70°C ‐ Đầu nối ra 8 chân. ‐
Kích thước bàn phím: 77x69 mm.
3. Bộ cảm biến độ ẩm đất:
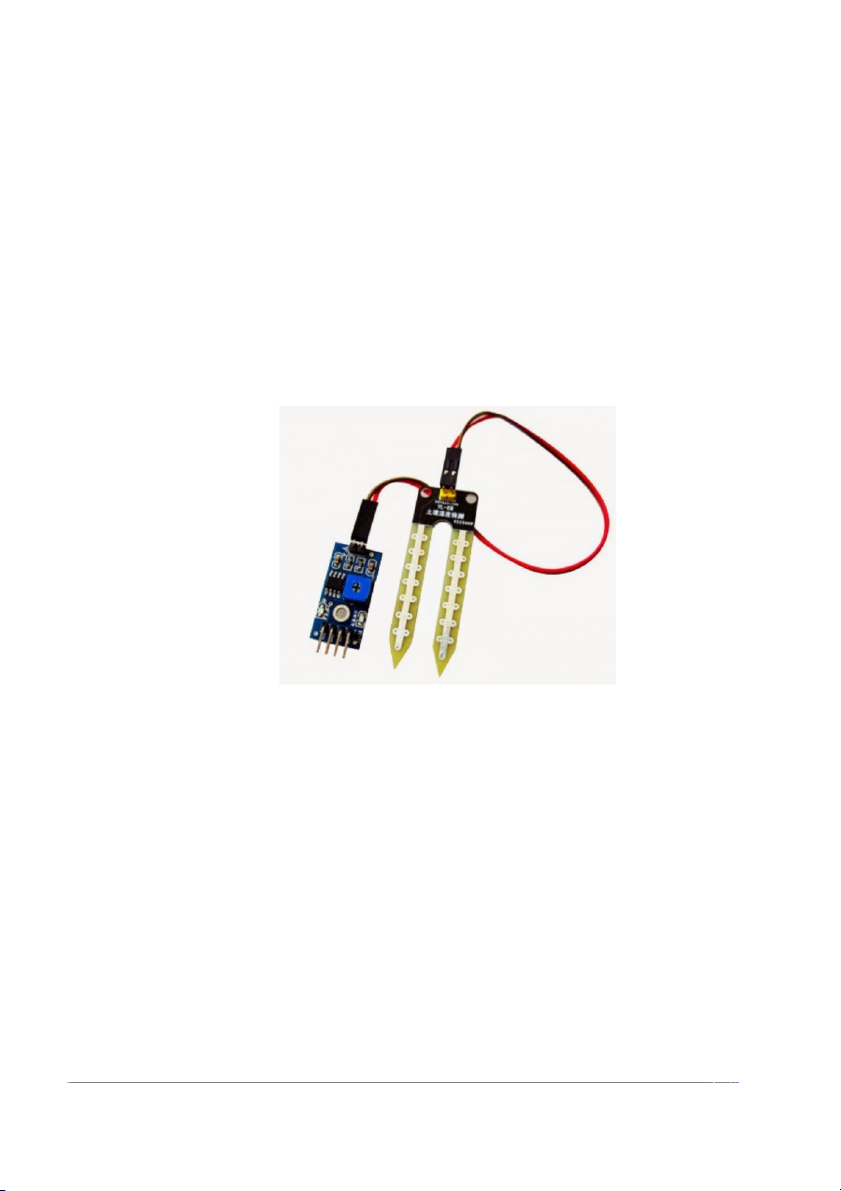
Hình 2.7: Bộ cảm biến độ ẩm đất. ‐
Khi module cảm biến độ ẩm phát hiện, khi đó sẽ có sự thay đổi điện áp ngay tại
đầu vào của IC LM393. IC này nhận biết có sự thay đổi nó sẽ đưa ra một tín hiệu
0V để báo hiệu và thay đổi như thế nào sẽ được tính toán để đọc độ ẩm đất. ‐
Cảm biến độ ẩm đất rất nhạy với độ ẩm với môi trường xung quanh, thường được
sử dụng để phát hiện độ ẩm của đất. ‐
Khi độ ẩm đất vượt quá giá trị được thiết lập, ngõ ra của module D0 ở mức giá trị là 0V. ‐
Ngõ ra D0 có thể được kết nối trực tiếp với vi điều khiển như (Arduino, PIC,
AVR, STM), để phát hiện cao và thấp, và do đó để phát hiện độ ẩm của đất. ‐
Đầu ra Analog A0 có thể được kết nối với bộ chuyển đổi ADC, có thể nhận được
các giá trị chính xác hơn độ ẩm của đất. 10 3.1 Cảm biến độ ẩm
Hình 2.8: Cảm biến độ ẩm.
Hai đầu đo của cảm biến được cắm vào đất để phát hiện độ ẩm. Dùng dây nối
giữa cảm biến và module chuyển đổi. Thông tin về độ ẩm đất sẽ được đọc về và
gửi tới module chuyển đổi. 3.2. Module chuyển đổi:
Hình 2.9: Bộ chuyển đổi.
Module chuyển đổi có cấu tạo chính gồm một IC so sánh LM393, một biến trở ,
4 điện trở dán 100 ohm và 2 tụ dán. Biến trở có chức năng định ngưỡng so sánh với
tín hiệu độ ẩm đất đọc về từ cảm biến. Ngưỡng so sánh và tín hiệu cảm biến sẽ là 2
đầu vào của IC so sánh LM393. Khi độ ẩm thấp hơn ngưỡng định trước, ngõ ra của
IC là mức cao (1), ngược lại là mức thấp (0). 3.2.1. Đặc điểm: ‐
Điện áp hoạt động: 3.3V – 5V ‐
Led đỏ báo nguồn vào, led xanh báo độ ẩm ‐ IC so sánh: LM393 ‐ VCC: 3.3V – 5V ‐ GND: 0V ‐
DO: đầu ra tín hiệu số (0 và 1) ‐
AO: đầu ra Analog (Tín hiệu tương tự) 11
4. Module Relay 1 kênh 5V-220VAC10A (cách ly quang): 4.1. Mô tả: ‐
Module Relay 1 kênh 5V gồm 1 rơ le điện áp hoạt động ở mức 5VDC, đầu ra
điều khiển hiệu điện tối đa ở mức 250V 10A đối với điện áp xoay chiều AC và
30V với điện áp 1 chiều DC. ‐
Module relay 1 kênh nhỏ gọn chuyên nghiệp, khả năng chống nhiễu tốt và khả
năng cách điện tốt. Trong module đã có sẵn mạch kích relay sử dụng IC cách ly
quang và transistor giúp cách ly hoàn toàn mạch vi điều khiển với rơ le bảo đảm
vi điều khiển hoạt động ổn định. ‐
Có sẵn header rất tiện dụng khi kết nối với vi điều khiển. Có các lỗ bắt vít rất tiện
lợi dễ lắp đặt trong hệ thống mạch. ‐
Mạch điều khiển relay 1 kênh này sử dụng chân kích mức Thấp (0V), khi có tín
hiệu 0V vào chân IN thì relay sẽ nhảy qua thường Mở của Relay.
Ứng dụng với relay module khá nhiều bao gồm cả điện DC hay AC.
Hình 2.10: Relay điều khiển. 4.2. Thông số: ‐
Opto cô lập, chống nhiễu tốt. ‐ Đèn báo đóng ngắt. ‐ Điện áp vào 5V (DC) ‐
Đầu ra điện thế đóng ngắt tối đa: DC 30V / 10A, AC 250V / 10A 5. Máy bơm nước: 5.1. Mô tả:
Máy bơm nước mini 5V có kích thước rất nhỏ gọn, sử dụng điện áp 3~5VDC, vì
thuộc dạng bơm chìm nên động cơ có khả năng chống nước và hoạt động khi ngâm
chìm trong nước, ứng dụng để bơm nước, dung dịch trong các thiết kế nhỏ, mô
hình tưới cây, hồ cá, tiểu canh... 12 Hình 2.11: Máy bơm. 5.2. Thông số: ‐ Điện áp: 3-5VDC ‐ Dòng điện: 100-200mA ‐
Mức đẩy nước tối đa: 0.3-0.8 mét. ‐
Khả năng bơm: 1.2-1.6L / phút. ‐ Trọng lượng: 28g. 13
CHƯƠNG 3: THIẾT KẾ HỆ THỐNG
1. Sơ đồ nguyên lý:
- Khởi tạo ngưỡng độ ẩm
- Xác định độ ẩm đất, gửi dữ liệu vào MCU
- Đọc dữ liệu, so sánh với độ ẩm ngưỡng để đưa quyết định qua Relay
- Cho phép bật tắt động cơ thông qua quyết định của MCU 14 - Bơm nước
Hình 3.1: Sơ đồ nguyên lý. * Nguyên lý hoạt động:
- Ban đầu, ta khởi tạo ngưỡng độ ẩm thông qua module bàn phím để MCU nhận.
- Sau đó, bộ cảm biến độ ẩm hoạt động, xác định độ ẩm đất để đưa dữ liệu vào MCU
- Lúc này, MCU sẽ thực hiện chức năng so sánh độ ẩm đưa vào với độ ẩm ngưỡng
được xác nhập lúc ban đầu. Nếu độ ẩm < độ ẩm ngưỡng thì kích hoạt cho Relay
hoạt động, kích hoạt máy bơm ở trạng thái bơm. Ngược lại, độ ẩm > độ ẩm
ngưỡng thì kích hoạt Relay tắt -> máy bơm tắt.
- Sau khi quá trình so sánh và quyết định bơm nước hay không bơm nước hoàn
thành, bước kiểm tra độ sẽ lặp lại để tiếp tục quá trình. 15
2. Lưu đồ giải thuật
Hình 3.2: Lưu đồ giải thuật. 16
Tài liệu liên quan:
-

Đồ án thực tập nhận thức về lốp xe drc đà nẵng
15 8 -

Đề cương môn cấu trúc máy tính và vi xử lý- Trường Đại học bách khoa - Đại học đà nẵng.
83 42 -
Đề cương môn cấu trúc máy tính và vi xử lý- Trường Đại học bách khoa - Đại học đà nẵng.
63 32 -

Đề cương môn cấu trúc máy tính và vi xử lý- Trường Đại học bách khoa - Đại học đà nẵn
70 35 -
Đề cương môn cấu trúc máy tính và vi xử lý- Trường Đại học bách khoa - Đại học đà nẵng.
67 34