Thiết kế hệ điều khiển máy tiện phôi tự động (CNC) | Môn Đồ án điện tử cơ bản - Đại Học Sư phạm Kỹ thuật Hưng Yên
Khi phôi được đưa vào máy, xi lanh 1(cấp phôi) được kích hoạt để đẩy phôi từ vị trí đầu tiên vào bên trong máy. Xi lanh này sử dụng cơ cấu cơ học để thực hiện quá trình này. Cảm biến định vị có thể được sử dụng để xác định vị trí chính xác của phôi. Tài liệu được sưu tầm gồm 37 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: Đồ án điện tử cơ bản (001) 12 tài liệu
Trường: Trường Đại Học Sư phạm Kỹ thuật Hưng yên 149 tài liệu
Tác giả:












Preview text:
lOMoAR cPSD| 23136115
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT HƯNG YÊN KHOA CƠ KHÍ ĐỒ ÁN MÔN HỌC
THIẾT KẾ HỆ ĐIỀU KHIỂN MÁY TIỆN PHÔI TỰ ĐỘNG SỬ DỤNG
BỘ ĐIỀU KHIỂN LOGIC KHẢ TRÌNH SINH VIÊN THỰC HIỆN Họ và tên SVTH: Lê Văn Hoàng - 11020182
Nguyễn Đức Anh - 11020231 Lê Duy Khánh - 11020077 Lê Văn Hào – 11020036
Giảng viên hướng dẫn: Nguyễn Xuân Công Hưng Yên, năm 2023 lOMoAR cPSD| 23136115
Phân Chia Công Việc: Nội dung SV Thực Hiện 1 Thực hiện đề tài Cả nhóm.
2 Nhận đề tài, gặp giáo viên hướng dẫn
để phổ biến quy định.
3 Nghiên cứu đề tài, tìm tài liệu về đề tài.
4 Viết đề cương chi tiết.
5 Tìm hiểu về cơ sở lý thuyết : Đức Anh, Hoàng.
- Yêu cầu công nghệ: cấu tạo, nguyên lý làm việc - Sơ đồ khối
- Lựa chọn thiết bị( tìm hiểu chi tiết
về các linh kiện được sử dụng
trong đồ án : cảm biến, xy lanh ,
van động cơ, điện từ,…)
- Tìm hiểu về bộ điều khiển( PLC S7-1200 CPU 1214C AC/DC/RLY) 6 Chế tạo mô hình : Hoàng,Đức Anh. - Mạch động cơ - Sơ đồ kết nối PLC - Mạch khí nén 7 Lập trình : Khánh , Hào. - Lưu đồ thuật toán
- Chương trình điều khiển
8 Nạp code, cân chỉnh hệ thống. Cả nhóm.
9 In báo cáo đồ án , bảo vệ. Cả nhóm. lOMoAR cPSD| 23136115 MỤC LỤC
DANH MỤC HÌNH ẢNH..............................................................................................3
LỜI MỞ ĐẦU................................................................................................................4
CHƯƠNG 1: TỔNG QUAN CỦA ĐỀ TÀI....................................................................5
1.1. Lý do chọn đề tài..................................................................................................5
1.2 Phương pháp nghiên cứu đề tài..............................................................................5
1.3 Mục đích yêu cầu của đề tài...................................................................................6
1.4 Ý nghĩa của đề tài..................................................................................................7
1.5 Kết luận.................................................................................................................7
CHƯƠNG 2: THIẾT KẾ CHẾ TẠO MÔ HÌNH...........................................................8
2.1 Yêu cầu công nghệ.................................................................................................8
2.2 Sơ đồ khối............................................................................................................10
2.3 Lựa chọn thiết bị..................................................................................................10
2.4 Chế tạo mô hình...................................................................................................19
2.5 Lập trình..............................................................................................................21
2.5.1 Lưu đồ thuật toán..............................................................................................21
2.5.2 Chương trình điều khiển...................................................................................22
2.6 Kết luận chương 2...............................................................................................23
CHƯƠNG 3 KẾT LUẬN VÀ KIẾN NGHỊ.................................................................24
3.1 Kết luận...............................................................................................................24
3.2 Kiến nghị.............................................................................................................24
TÀI LIỆU THAM KHẢO.........................................................................................25 DANH MỤC HÌNH ẢNH lOMoAR cPSD| 23136115
Hình 2.1 Mô hình công nghệ.................................................................................9
Hình 2.2 Sơ đồ khối..............................................................................................10
Hình 2.3 Xilanh kép..............................................................................................11
Hình 2.4 Xi lanh khí nén SMC CDJ2D................................................................12
Hình 2.5 Động cơ giảm tốc DC JGB37-520........................................................14
Hình 2.6 Cảm biến xylanh...................................................................................16
Hình 2.7 Cảm biến từ CS1-J................................................................................17
Hình 2.8 Van điện 5/2..........................................................................................17
Hình 2.9 Đế van....................................................................................................19
Hình 2.10 Relay Omron G6D-F4B DC24............................................................20
Hình 2.11 Trục vitsme THK KR26.......................................................................21
Hình 2.12 Bộ điều khiển PLC s7 1200 CPU 1214 AC DC RLY..........................21
Hình 2.13 Mô hình...............................................................................................22
Hình 2.14 Mạch động cơ ..2
Hình 2.15 Sơ đồ kết nối PLC...............................................................................29
Hình 2.16 Mạch khí nén.......................................................................................32
Hình 2.17 Lưu đồ thuật toán.................................................................................33
Hình 2.18 Mô hình bố trí thiết bị điện.................................................................34
Hình 2.19 Bảng Symbol.......................................................................................35 lOMoAR cPSD| 23136115 LỜI MỞ ĐẦU
Trong bối cảnh cuộc cách mạng công nghiệp 4.0 đang diễn ra với tốc độ
nhanh chóng, sự hội tụ giữa công nghệ và sản xuất đã tạo ra những khả năng mới
đầy hứa hẹn. Trong tương lai gần, khả năng tự động hóa quy trình sản xuất sẽ trở
thành tiêu chuẩn tất yếu và điều này thúc đẩy sự phát triển của các giải pháp như
Mô hình Máy Tiện dùng PLC. Đồ án tốt nghiệp này đặt ra mục tiêu nghiên cứu
và ứng dụng chi tiết về Mô hình Máy Tiện kết hợp với PLC (Programmable
Logic Controller) trong quy trình sản xuất, nhằm tối ưu hóa hiệu suất, tăng cường
độ chính xác và thúc đẩy sự phát triển bền vững của ngành công nghiệp.
Sự cạnh tranh gay gắt đòi hỏi các doanh nghiệp phải tìm kiếm cách tối ưu
hóa mọi khía cạnh của hoạt động sản xuất. Mô hình Máy Tiện là một trong những
công cụ quan trọng trong lĩnh vực gia công cơ khí, còn PLC là một nền tảng
kiểm soát tự động chuyên dụng. Sự kết hợp giữa hai công nghệ này tạo ra mô
hình máy tiện dùng PLC, mang đến sự linh hoạt và hiệu quả trong quản lý quy
trình sản xuất, đồng thời tối ưu hóa việc điều chỉnh và giám sát các thao tác gia công.
Với nhu câu trên em đã được nghiên cứu đề tài “Thiết kế hệ điều khiển
máy tiện phội tự động sử dụng bộ điều khiển logic khả trình”. Để hoàn thành
được đề tài này em xin chân thành cảm ơn thầy Nguyễn Xuân Công trong
Trường Đại học Sư Phạm Kỹ Thuật Hưng Yên đã giúp đỡ em tận tình trong quá
trình thực hiện đề tài. Đồ án tốt nghiệp này là sự nỗ lực của em để khám phá và
chia sẻ kiến thức về việc ứng dụng Mô hình Máy Tiện dùng PLC trong môi
trường sản xuất hiện đại. Em tin rằng đây là bước đi quan trọng trong việc tiến
xa hơn trên con đường tự động hóa sản xuất và sẽ đem lại giá trị thiết thực cho
cả ngành công nghiệp và cộng đồng kỹ thuật.
Em xin chân thành cảm ơn!
Hưng Yên, ngày tháng năm 2023 lOMoAR cPSD| 23136115
CHƯƠNG 1: TỔNG QUAN VỀ ĐỀ TÀI
1.1. Lý do chọn đề tài
Trong giai đoạn công nghiệp hóa, hiện đại hóa nền kinh tế đất nước ngày càng
có nhiều các dây chuyền sản xuất hiện đại được sử dụng rộng rãi trong tất cả các
lĩnh vực sản xuất, phục vụ đời sống con người. Hiện nay, các nhà sản xuất không
ngừng cho ra đời các loại PLC thế hệ mới có tính chất kế thừa, dễ dàng sử dụng và
phát huy tối đa công năng sản phẩm. Trước sự đa dạng, khả năng ứng dụng rộng rãi
trong đời sống thực tế hiện nay thì việc tìm hiểu, lập trình ứng dụng PLC trở thành
một phần yêu cầu của sinh viên ngành Cơ Điện Tử.
Máy công cụ cắt gọt kim loại là thiết bị chủ chốt trong các nhà máy và các
phân xưởng cơ khí để chế tạo ra các chi tiết máy, máy móc , khí cụ , dụng cụ và các
loại sản phẩm khác về cơ khí ứng dụng trong sản xuất và đời sống. Máy cắt kim
loại chiếm một vị trí đặc biệt quan trọng trong ngành chế tạo máy để sản xuất ra các
chi tiết của máy khác, nghĩa là chế tạo ra các tư liệu sản xuất (Chế tạo ra các máy
móc khác nhau để cơ khí hoá và tự động hoá nền kinh tế quốc dân). Trên cơ sở đó
và được sự đồng ý của khoa Cơ khí – Bộ môn Cơ điện tử chúng em tiến hành thực
hiện đề tài: “Thiết kế hệ điều khiển máy tiện phội tự động sử dụng bộ điều khiển
logic khả trình”.
1.2 Phương pháp nghiên cứu đề tài ❖ Nghiên cứu lý luận:
- Tham khảo tài liệu có liên quan đến đề tài thực hiện.
- Thu thập xử lí thông tin
- Phân tích tài liệu và chọn thông tin phù hợp.
- Tham khảo ý kiến giáo viên hướng dẫn.
- Nghiên cứu tìm hiểu thành phần, các thiết bị và sơ đồ kết nối. - Nghiên
cứu phương pháp thiết kế cơ khí cho mô hình
Hệ thống cấp phôi, giữ phôi, thả phôi Hệ thống an toàn
Nghiên cứu module điều khiển, hệ thống điều khiển và logic lOMoAR cPSD| 23136115
Thiết kế mạch điện, giải pháp lập trình điều khiển giám sát cho mô hình
1.3 Mục đích yêu cầu của đề tài
❖ Mục đích nghiên cứu:
- Nắm vững kiến thức: Tổng hợp kiến thức đã học , hiểu rõ về cơ cấu và hoạt động
của máy tiện phôi tự động, cũng như các thành phần điều khiển như hệ thống CNC và PLC.
- Phát triển kỹ năng lập trình: Học cách lập trình máy tiện phôi tự động thông
qua các phần mềm mô phỏng . Phát huy tính logic , sáng tạo trong học tập và làm việc.
- Nghiên cứu và tích hợp PLC: Tìm hiểu về việc tích hợp PLC vào máy tiện phôi
tự động để điều khiển và giám sát quá trình sản xuất. Nhằm tạo ra những sản
phẩm tiên tiến , có tính tự động hóa cao.
- Tạo mô phỏng thực tế: Xây dựng một mô hình máy tiện phôi tự động , tạo môi
trường thử nghiệm giúp hiểu rõ hơn về hoạt động của máy và phương pháp điều
khiển máy tiện phôi tự động.
- Đánh giá hiệu suất và tối ưu hóa: Sử dụng mô phỏng để đánh giá hiệu suất của
máy tiện phôi tự động, cũng như tối ưu hóa các tham số điều khiển để đạt được
sản xuất hiệu quả hơn.
- Kiểm tra kiến thức và sáng tạo: Đây là cơ hội để kiểm tra lại kiến thức đã học
và phát triển khả năng sáng tạo, đặc biệt trong việc giải quyết các vấn đề phức tạp
liên quan đến máy tiện phôi tự động và điều khiển tự động.
- Tự khẳng định bản thân trước khi ra trường: Nghiên cứu này có thể giúp sinh
viên tự khẳng định bản thân và chuẩn bị cho sự tham gia vào công việc và hoạt
động sản xuất trong tương lai. ❖ Yêu cầu đề tài:
-Thông số của mô hình : Kích thước : • Chiều dài 60 cm • Chiều rộng 40 cm • Chiều cao 20 cm lOMoAR cPSD| 23136115
Bộ điều khiển : Siemens s7 1200 CPU 1214c ac/dc/relay
Sản phẩm gia công : Gỗ ❖ Nhiệm vụ:
- Tìm tài liệu tham khảo. Đây là khâu rất quan trọng. Có tài liệu tham khảo tốt
sẽ đảm bảo đồ án thành công tốt.
- Nghiên cứu sơ bộ tài liệu và đề tài, sau đó viết đề cương (sơ bộ) của đồ án và
thông qua giáo viên hướng dẫn, bộ môn có trách nhiệm duyệt đề cương chính
thức. Đề cương sẽ giúp sinh viên khái quát vấn đề trước khi đi vào chi tiết.
Cái tổng thể phải được hình dung trước, làm trước cái chi tiết.
- Tiến hành nghiên cứu lý thuyết, làm thực nghiệm theo nội dung đề tài đã được
vạch ra trong đề cương. Vừa làm vừa viết đồ án để thực nhiện đúng tiến độ
do giáo viên hướng dẫn đề ra.
- Tìm hiểu thiết bị có trên mô hình lắp đặt sẵn.
- Đưa ra giải pháp khi mà số liệu thu được chênh lệch so với thực tế.
- Hướng dẫn sử dụng và bảo trì cho mọi người an toàn và hiệu quả.
1.4 Ý nghĩa của đề tài
- Giúp sinh viên tổng hợp kiến thức đã học , thiết kế ra mô hình điều khiển tự động.
- Hình thành kĩ năng thực hành , thiết kế và tổng hợp hệ thống.
1.5 Kết luận chương 1
Để đáp ứng yêu cầu bài toán đặt ra thì mô hình phải đầy đủ các yêu cầu sau:
- Xylanh cấp phôi- Xylanh kẹp phôi - Động cơ quay phôi - Bộ phận tiện phôi - Xylanh đẩy sản phẩm
- Cảm biến quang, cảm biến từ
- Nút bấm, van khí , rơle, nguồn ....
Qua quá trình nghiên cứu em đã hiểu được nguyên lý hoạt động của máy tiện phôi tự
động sử dụng bộ điều khiển logic khác trình , tìm ra các phương hướng thiết kế và giải
quyết vấn đề, hợp lý giá thành , gia công dễ dàng mà hiệu quả cao. lOMoAR cPSD| 23136115
CHƯƠNG 2: THIẾT KẾ CHẾ TẠO MÔ HÌNH
2.1 Yêu cầu công nghệ
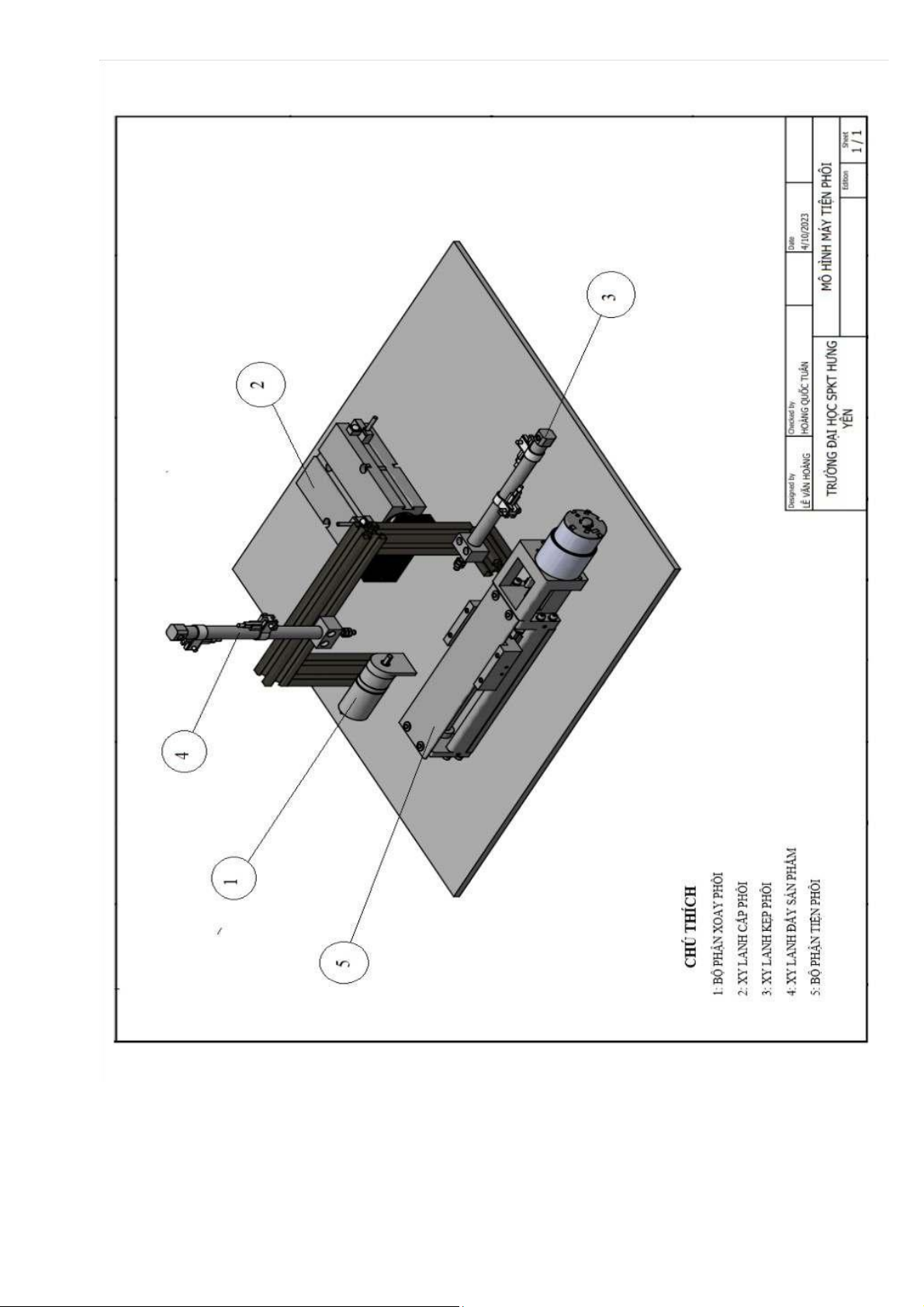
- Máy tiện phôi tự động gồm các bộ phận : Bộ phận cấp phôi Bộ phận kẹp phôi Bộ phận thoát phôi Bộ phận tiện phôi
Nguyên lý hoạt động và sơ đồ công nghệ :
- Khi phôi được đưa vào máy, xi lanh 1(cấp phôi) được kích hoạt để đẩy
phôi từ vị trí đầu tiên vào bên trong máy. Xi lanh này sử dụng cơ cấu cơ
học để thực hiện quá trình này. Cảm biến định vị có thể được sử dụng để
xác định vị trí chính xác của phôi.
- Sau khi phôi đã được đẩy vào trong máy, xi lanh 2(xylanh kẹp phôi) được
kích hoạt để đẩy phôi tới vị trí kẹp phôi, ngăn phôi di chuyển ngược lại,
sau đó xylanh cấp phôi đi về
- Tiếp đến trục động cơ quay phôi, tiếp đến bàn chạy dao di chuyển vào để
tiện phôi. Các bộ cảm biến được sử dụng để theo dõi vị trí của bàn chạy
dao và đảm bảo rằng quá trình tiện diễn ra chính xác.
- Bàn chạy dao di chuyển để thực hiện hết quá trình tiện phôi. Sau đó bàn
chạy dao lùi dao về vị trí ban đầu ( vị trí an toàn ko chạm vào phôi sau khi tiện )
- Sau khi kết thúc quá trình tiện, khi dao đã xác nhận lùi về vị trí an toàn ,
xi lanh 3( xylanh đẩy sản phẩm ) đẩy ra làm sản phẩm rơi ra khỏi bàn tiện,
kết thúc một chu trình làm việc. lOMoAR cPSD| 23136115
Hình 2.1 Mô hình công nghệ lOMoAR cPSD| 23136115 2.2 Sơ đồ khối
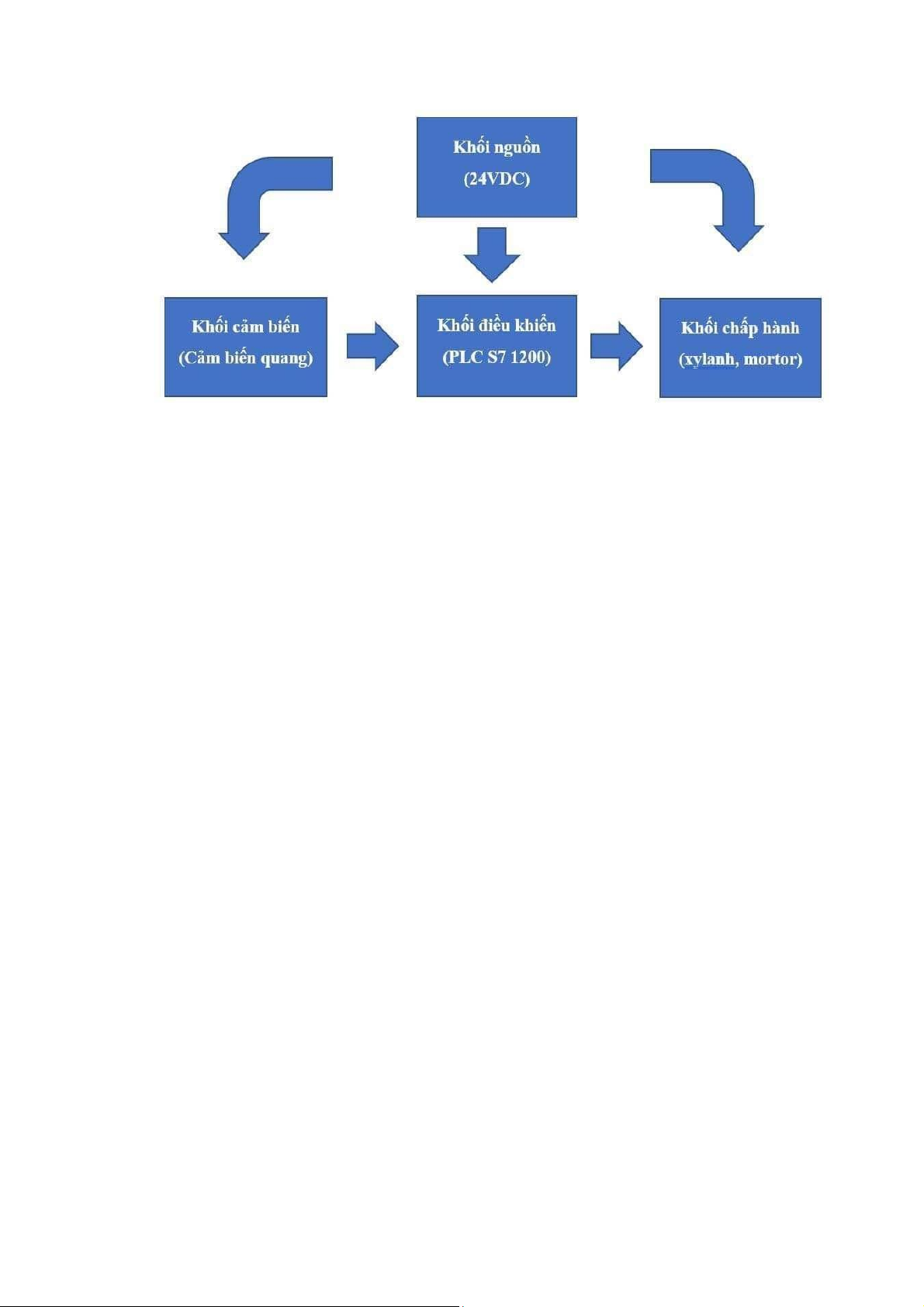
Hình 2.2 Sơ đồ khối
Phân tích các khối:
- Khối nguồn: Gồm bộ chuyển đồi 220-24VDC.
- Khối cảm biến: Gồm cảm biến quang để thu thập thông tin từ môi trường.
- Khối điều khiển: Gồm PLC có chức năng điều khiển và nhận các tín hiệu từ nút nhấn.
- Khối chấp hành: Gồm các xylanh và motor.
2.3 Lựa chọn thiết bị
a, Xilanh kép CXSJM 10mm – 50mm.
- Xilanh kép là một thiết bị chuyển động được sử dụng để tạo ra chuyển động
tuyến tính kép bằng cách sử dụng hai xilanh đơn song song và kết nối bằng
một thanh trục chung. Chúng thường được sử dụng trong các ứng dụng tự
động hóa và công nghiệp để thực hiện các nhiệm vụ chuyển động, vị trí và lực cần thiết.
- Xylanh hai thanh, dòng CXSJM nhỏ gọn có thể gắn được ba hướng.
- Xylanh hai thanh với chức năng dẫn hướng thích hợp cho các ứng dụng nhấc
và đặt, tạo lực và áp lực, chuyển động tuyến tính kép.
- Ổ bi và ổ trượt là tiêu chuẩn cho các dòng sản phẩm. lOMoAR cPSD| 23136115
- Có thể gá phôi trên ba bề mặt.
- Lực đẩy chính xác, độ chính xác không quay .
- Phạm vi hành trình bộ điều chỉnh từ 0 đến -5mm.
Thông số kỹ thuật - Hành trình 10mm - 50mm - Hình 2.3 Xilanh kép
b, Xylanh khí nén SMC CDJ 2D
* Đặc điểm của xi lanh khí nén mini SMC CDJ2D
Xi lanh khí nén loại nhỏ SMC CDJ2D đến từ thương hiệu SMC, đây là một
trong những thương hiệu chuyên sản xuất thiết bị, phụ kiện khí nén hàng đầu đến
từ Nhật Bản. CDJ2D là thiết bị xi lanh khí nén loại nhỏ với chất liệu inox chất
lượng cao, cho khả năng hoạt động ổn định và bền bỉ. •
Chất liệu inox chắc chắn, có khả năng vận hành bền bỉ, ổn định, hạn chế han gỉ tối đa. •
Khả năng chịu áp lực và nhiệt độ tốt: xylanh khí nén SMC CDJ2D có khả
năng chịu nhiệt từ -10 đến 60 độ C, và áp suất đạt 0.7MPa. •
Kích thước nhỏ gọn với kích thước nòng không quá 16mm. •
Phù hợp sử dụng trong môi trường, không gian nhỏ gọn, dùng cho máy móc
nhỏ, phòng thí nghiệm,… lOMoAR cPSD| 23136115
Hình 2.4 Xylanh khí nén SMC CDJ 2D -Thông số kỹ thuật:
+ Kích thước nòng : 10;16mm + Hành trình : 50-200mm
+ Áp suất hoạt động tối đa : 0.7 MPa
+ Áp suất hoạt động tối thiểu : 0.05 Mpa
+ Nhiệt độ lưu lượng và môi trường : 10-70 độ C
+ Áp suất phá hủy : 1 MPa c,
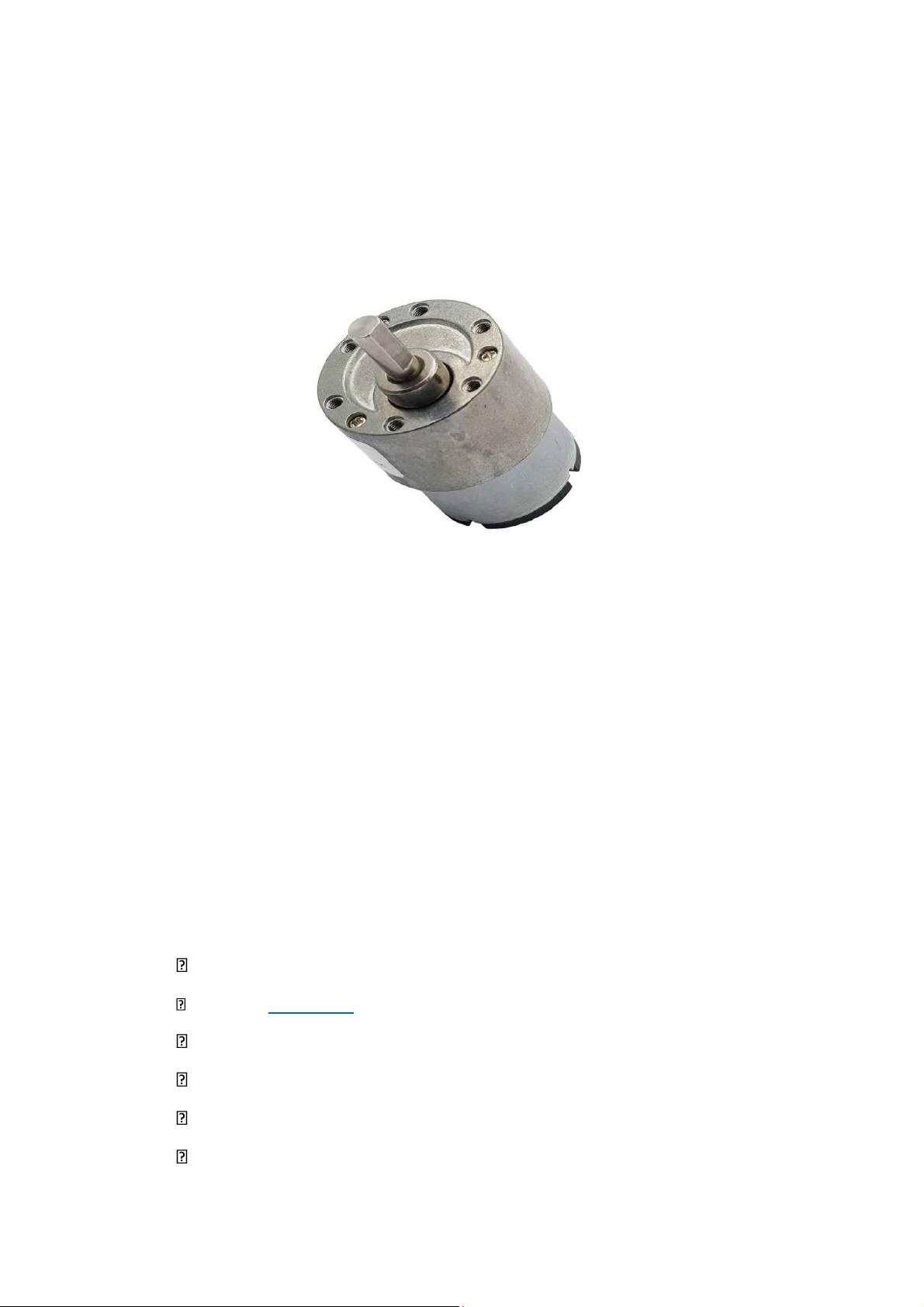
Động cơ giảm tốc DC JGB37-520
Động Cơ Giảm Tốc DC JGB37-520,200rpm có chất lượng
tốt, lõi đồng và chổi than to, hộp giảm tốc chắc chắn bằng kim loại,
cho lực kéo mạnh, moment lớn, thích hợp cho các ứng dụng cần kéo tải nặng. *Thông số kỹ thuật: •
Điện áp làm việc : 6-15VDC •
Điện áp định mức: 12VDC •
Dòng điện không tải: 0.1A lOMoAR cPSD| 23136115 • Tốc độ: 200 RPM • Lực kéo moment: 0.45kg.cm • Công suất: 7-15W • Trục 6MM khuyết D
Hình 2.5 Động Cơ Giảm Tốc DC JGB37-520
d, Cảm biến từ Xilanh Sensor SMC D-A93,D-A93SAPC
Cảm biến từ Xilanh là một thiết bị sử dụng trong tự động hóa và công
nghiệp để giám sát và phát hiện vị trí hoặc chuyển động của xilanh. Cảm biến từ
thường được sử dụng để gửi tín hiệu về vị trí của xilanh về một hệ thống điều
khiển hoặc máy tính để thực hiện các hoạt động và quyết định liên quan. -
Cảm biến thiết kế hơi đặc biệt có đi kèm connector M8 ba chân, đối
với D-A93 thì chỉ xài 2 dây.
Sử dụng điện áp 24VDC hoặc 100VAC kiểu mắc tải nối tiếp 2 dây.
Tích hợp led báo ngõ ra khi có tác động.
Tải sử dụng là relay hoặc PLC (công suất tải 5-40mA).
Cảm biến tiệm cận từ tính
Nhiệt độ môi trường hoạt động: từ -10ºC đến 60ºC.
Mức bảo vệ: IP67 kháng nước và bụi hiệu quả. lOMoAR cPSD| 23136115 -
Cảm biến từ xilanh thường được sử dụng để phát hiện vị trí của piston
hoặc thanh trục trong xilanh. Nó có thể gửi tín hiệu khi piston tiếp cận hoặc rời
xa một điểm cụ thể trên hành trình của nó.
Hình 2.6 Cảm biến Xilanh -
Khi người vận hành tác động một lực điện vào trong hệ thống, dây dẫn
sẽ chịu trách nhiệm dẫn điện vào trong van. Nguồn điện này sẽ tác động lên cuộn
coil, cuộn coil sẽ tạo ra các từ trường làm pít tông di chuyển lên xuống theo lực
đàn hồi của lò xo. Từ đó mở ra các khóa chốt giúp cổng vào và cổng làm việc được lưu thông. -
Lúc này, khí nén sẽ theo cổng vào và tiến thẳng đến hệ thống bằng
cổng ra, sau khi thực hiện xong nhiệm vụ, chúng sẽ được đưa ra ngoài môi trường
bên ngoài bằng cổng xả, kết thúc hành trình. -
Sau khi hoạt động, chỉ cần ngắt nguồn điện, pít tông bị tác động sẽ
quay về trạng thái ban đầu. Quá trình đóng mở này diễn ra khá nhanh chóng,
thường chỉ trong vòng 1 giây. lOMoAR cPSD| 23136115
e, Cảm Biến Từ Cho Xi Lanh CS1-J -
Cảm Biến Từ Cho Xi Lanh CS1-J là loại bản biến từ sensor chuyên
dùng cho các loại xi lanh khí nén. Cảm biến từ xi lanh CS1-J điều chỉnh xilanh
tiến lùi đến vị trí nào đó.
Hình 2.7 Cảm biến từ CS 1 - J - Thông Số Kĩ Thuật: Model: CS1-J Điện áp: 5 ~ 240V AC/DC
Nhiệt độ hoạt động: -10 ~ 70°C Đèn báo: Led đỏ
Tần số chuyển đổi tối đa: 200Hz
Bảo vệ ngắn mạch: không có Độ nhạy: 60 - 75ns
Trọng lượng của cảm biến từ CS1-J:
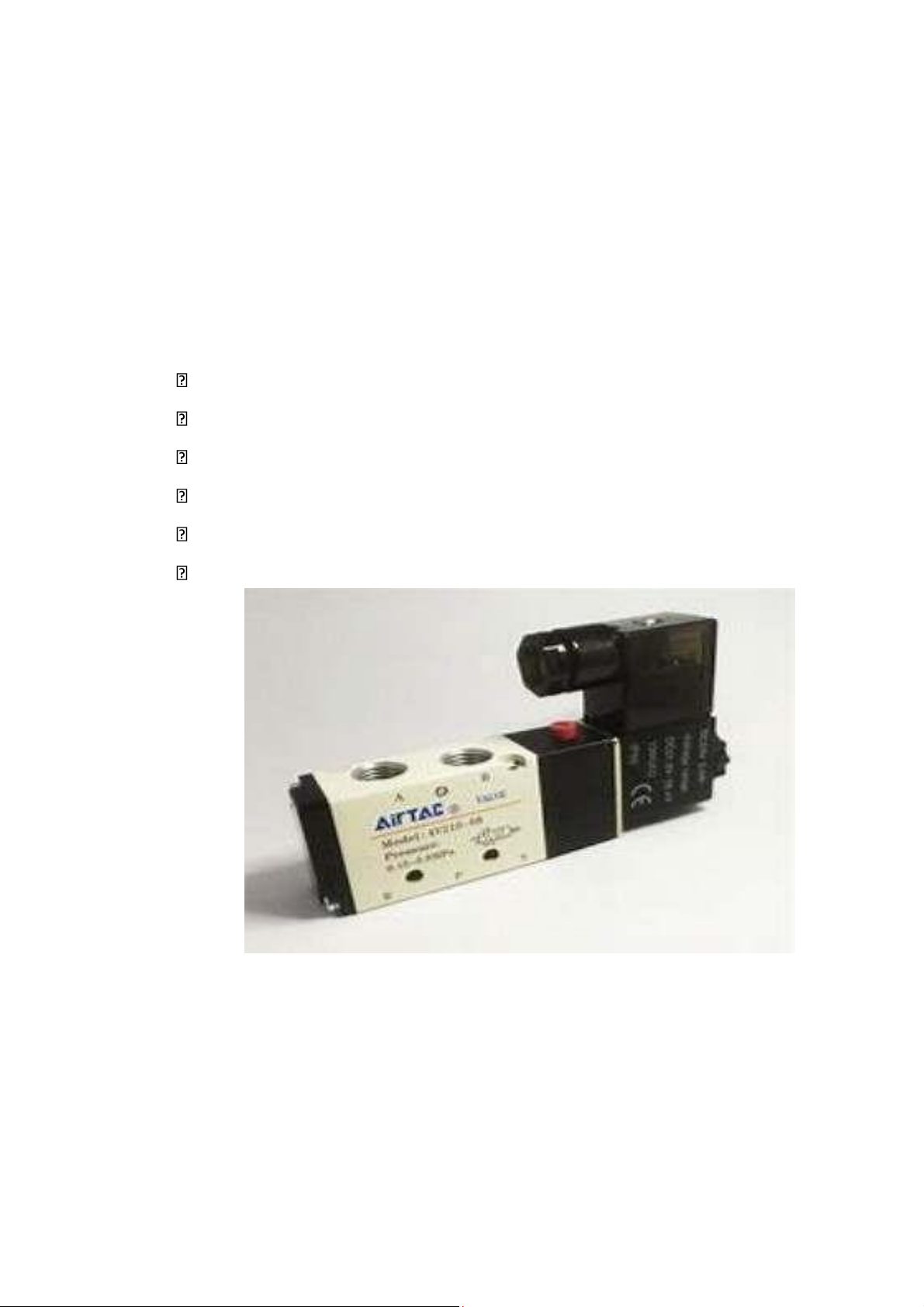
50g Chiều dài dây: 2m f, Van điện từ 24v DC NO-NC -
Van điện từ (solenoid valve) là một thiết bị điều khiển dòng chất
lỏnghoặc khí bằng cách sử dụng một cơ cấu điện từ. Nó là một thành phần quan
trọng trong các hệ thống tự động hóa, công nghiệp và ứng dụng khác. "24V DC lOMoAR cPSD| 23136115
NO-NC" thường ám chỉ van điện từ có nguồn cấp điện 24V DC và có khả năng
hoạt động ở hai trạng thái là Normally Open (NO) và Normally Closed (NC). -
Van điện từ "24V DC NO-NC" có thể được sử dụng trong nhiều
ứngdụng khác nhau. Ví dụ, nó có thể được sử dụng để kiểm soát dòng chất lỏng
trong các hệ thống xử lý nước, trong hệ thống điều khiển khí nén, trong ngành
công nghiệp dầu khí, thực phẩm và đồ uống, tự động hóa công nghiệp, và nhiều ứng dụng khác. - Van điện từ gồm có:
Thân van điện từ bao gồm 5 cửa lỗ và 2 vị trí.
Đầu coil điện sử dụng điện DC 24V và AC 220V.
Piston nằm trong thân van để đóng mở cửa van.
Nút đóng mở van điện từ 5/2. Lò xo đàn hồi.
Các bulong ốc vít cố định van.
Hình 2.8 Van điện từ 5/2 -
Nguyên lý hoạt động: Van điện từ hoạt động dựa trên cơ chế từ tích
cực, trong đó dòng điện được điều khiển để tạo ra một trường từ điện, làm thay
đổi trạng thái của van. -
Nguồn cấp điện: Van điện từ này hoạt động với nguồn cấp điện là 24V
DC, nghĩa là dòng điện có chiều điện áp cố định và được cấp từ nguồn 24V DC. lOMoAR cPSD| 23136115 -
Trạng thái hoạt động NO-NC:
Normally Open (NO): Trong trạng thái không có điện áp được cấp, van ở trạng
thái mở, cho phép dòng chất lỏng hoặc khí lưu qua.
Normally Closed (NC): Trong trạng thái không có điện áp, van ở trạng thái
đóng, chặn dòng chất lỏng hoặc khí. g, Đế van
- Mục đích lắp đặt: gọn gàng và lắp đặt van lấy chung một nguồn cấp khí. Hãng
sản xuất: SMC- Japan Mã sản phẩm: VV5FS2-10-051-02
- Giới thiệu về sản phẩm: được sử dụng với dòng van khí nén VFS2000 với đế
van dạng non plug in có tùy chọn từ 01 đến 16 cụm van Hình 2.9 Đế van
h, Relay Omron G6D-F4B DC24
- Relay Omron G6D-F4B DC24 là một loại relay điện đặc biệt sản xuất
bởiOmron Corporation, một công ty nổi tiếng trong lĩnh vực công nghệ điều
khiển và tự động hóa. Relay là một thành phần quan trọng trong các ứng dụng lOMoAR cPSD| 23136115
điện tử và tự động hóa để kiểm soát dòng điện lớn bằng cách sử dụng tín hiệu điều khiển nhỏ hơn.
- Relay Omron G6D-F4B DC24 hoạt động như một thiết bị chuyển đổi,
đượckích hoạt bởi một tín hiệu điện. Khi tín hiệu điện vào được cung cấp cho
relay, nó có thể thực hiện một loạt các chức năng tùy theo cấu hình cụ thể của nó.
- Relay Omron G6D-F4B DC24 thường được sử dụng để kiểm soát dòng
điệnlớn thông qua một tín hiệu điều khiển nhỏ hơn. Điều này làm cho relay
trở thành một thành phần quan trọng trong các hệ thống điều khiển và tự động hóa.
- Relay Omron G6D-F4B DC24 có thể được sử dụng trong nhiều ứng dụngkhác
nhau như trong tự động hóa công nghiệp, điều khiển máy móc, hệ thống đèn
chiếu sáng, hệ thống bảo vệ dòng điện, điều khiển nhiệt độ, và nhiều ứng dụng khác.
- Relay có thể có nhiều kiểu kết nối khác nhau, bao gồm các chân cắm
hoặccường độ lắp trực tiếp trên bo mạch.
- Relay thường đi kèm với các tính năng bảo vệ, chẳng hạn như bảo vệ quá
tảihoặc quá áp. Relay thường được lắp đặt vào một vị trí cụ thể trong hệ thống
điện. Việc bảo trì và kiểm tra định kỳ là quan trọng để đảm bảo hoạt động ổn định. lOMoAR cPSD| 23136115
Hình 2.10 Relay Omron G6D-F4B DC24 - Thông số kỹ thuật:
Điện áp định mức: DC24 V
Form tiếp điểm: SPST-NO × 4
Số Rơ le có thể lắp: 4
Dòng tiếp điểm định mức: 3.0 A Có 4 đầu ra độc lập
Dòng tiếp điểm định mức 3 A
Được trang bị đèn chỉ thị kèm diode Dòng điện : 5 A Số tiếp điểm : 4 SPST
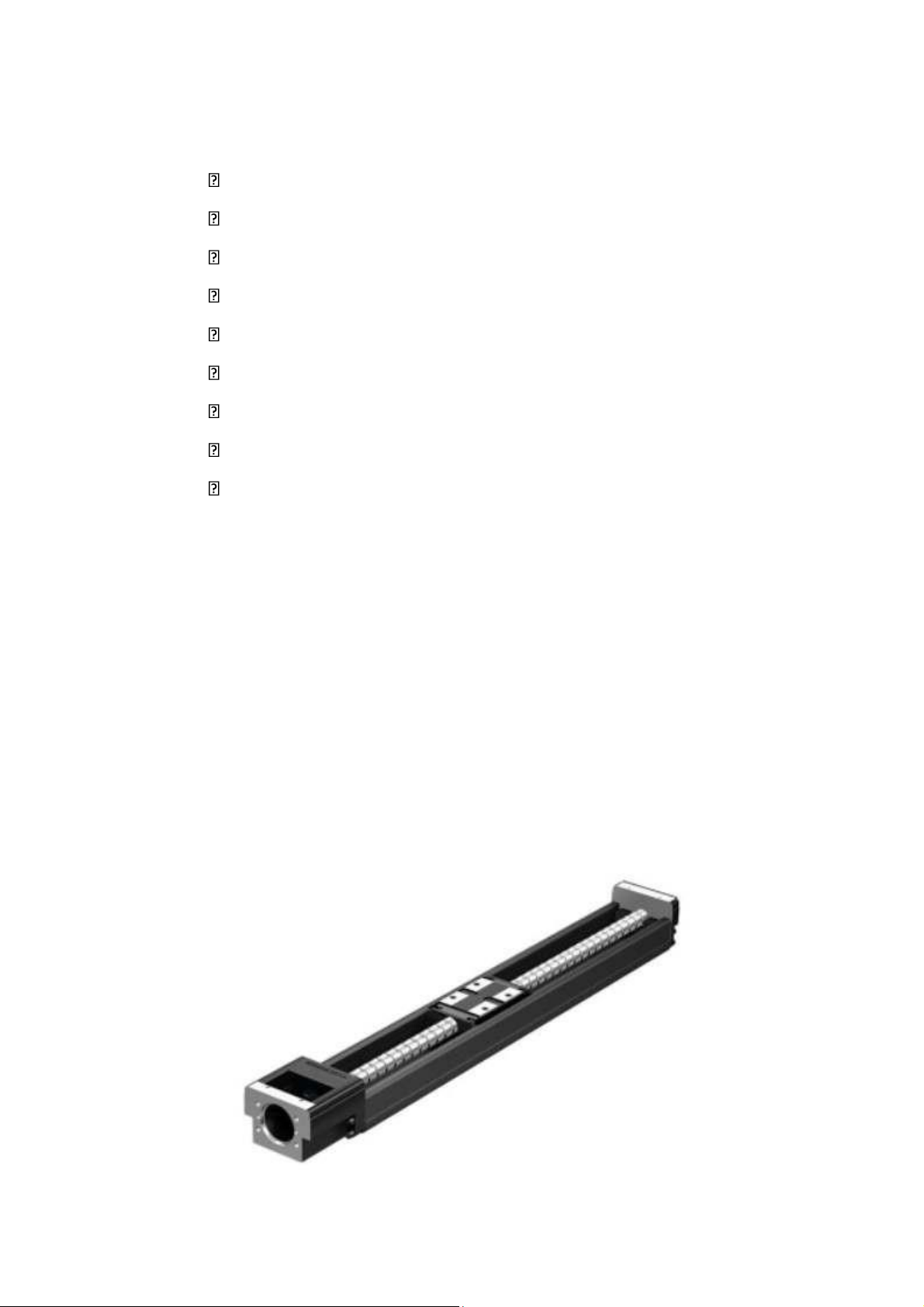
i, Bộ trục vít me chạy dao THK KR26
Trục vít THK KR26 là một phần của hệ thống trục vít có công dụng chuyển động
tuyến tính bằng cách sử dụng vít và vòng trượt. Trục vít THK KR26 được sản xuất bởi
công ty THK, một trong những nhà sản xuất hàng đầu trong lĩnh vực các giải pháp trục
vít và hệ thống trượt động tự động.
Hình 2.11 Trục vít me THK KR26
Tài liệu liên quan:
-

Bài tập cá nhân môn Điện tử cơ bản | Trường Đại Học Sư phạm Kỹ thuật Hưng Yên
36 18 -

Tiểu luận Thiết kế hệ thống nhúng phân loại gạch men sử dụng thị giác máy tính môn Đồ án điện tử cơ bản | Trường Đại Học Sư phạm Kỹ thuật Hưng Yên
36 18 -

Nghiên Cứu Mạch Bảo Vệ Thấp Áp Cho IC Điều Khiển Động Cơ | Môn Đồ án điện tử cơ bản - Đại Học Sư phạm Kỹ thuật Hưng Yên
90 45 -

Hướng Dẫn Sử Dụng Multisim Trong Thiết Kế Mạch Điện Tử | Môn Đồ án điện tử cơ bản - Đại Học Sư phạm Kỹ thuật Hưng Yên
98 49