Thiết Kế Hệ Thống Truyền Động Điện môn Cơ điện tử | Trường Đại Học Thái Nguyên
Ngành Kỹ thuật Điện là một ngành học đóng một vai trò vô cùng quan trọng trong hầu hếtmọi lĩnh vực trong cuộc sống hằng ngày của chúng ta. Thông qua dự án liên môn PBL 2 (ProjectBased Learning 2) với sự kết hợp kiến thức của 3 môn học quan trọng là Điện tử công suất, Kỹthuật đo lường, Truyền động điện, yêu cầu các sinh viên trong cùng một nhóm phải làm việc nhómhiệu quả, tìm tòi, nghiên cứu thêm để hoàn thiện dự án một cách tốt nhất có thể.
Môn: Cơ điện tử 12 tài liệu
Trường: Đại học Thái Nguyên 386 tài liệu
Tác giả:




Preview text:
lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG 2 LỜI CẢM ƠN
Ngành Kỹ thuật Điện là một ngành học đóng một vai trò vô cùng quan trọng trong hầu hết mọi
lĩnh vực trong cuộc sống hằng ngày của chúng ta. Thông qua dự án liên môn PBL 2 (Project Based
Learning 2) với sự kết hợp kiến thức của 3 môn học quan trọng là Điện tử công suất, Kỹ thuật đo
lường, Truyền động điện, yêu cầu các sinh viên trong cùng một nhóm phải làm việc nhóm hiệu quả,
tìm tòi, nghiên cứu thêm để hoàn thiện dự án một cách tốt nhất có thể. Và tất nhiên không thể thiếu
sự tận tình trong giảng dạy cũng như luôn nhiệt tình giải đáp các thắc mắc của thầy Nguyễn Khánh Quang.
Tuy rằng đây là dự án liên môn thứ hai chúng em thực hiện, vẫn còn nhiều thiếu sót và khó
khăn trong quá trình thực hiện. Đòi hỏi mỗi thành viên phải cố gắng và nỗ lực hơn nữa để hoàn
thành dự án một cách tốt nhất. Nhưng chính nhờ vào sự giúp đỡ cũng như tạo điều kiện tốt nhất cho
sinh viên của thầy Nguyễn Khánh Quang chúng em đã có thể tự tin hoàn thiện dự án của mình.
Nhóm 6 xin chúc thầy cô trong Khoa Điện và thầy Nguyễn Khánh Quang thật nhiều sức khỏe,
ngày càng thành công trong cuộc sống và sự nghiệp trồng người của mình. lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG MỤC LỤC
CHƯƠNG 1: TỔNG QUAN VỀ DỰ ÁN ................................................................................................ 5
1.1. ĐỀ TÀI CỦA NHÓM ....................................................................................................................... 5
1.2. DANH SÁCH KIỂM TRA PHẠM VI DỰ ÁN ................................................................................ 5
1.2.1. Mục tiêu của dự án: ........................................................................................................................ 5
1.2.2. Sản phẩm của dự án: ...................................................................................................................... 5
1.2.3. Các yêu cầu về kỹ thuật: ................................................................................................................ 5
1.3. BẢNG TÓM TẮT CÁC CÔNG VIỆC ............................................................................................. 5
1.4. GIẢN ĐỒ GANTT CỦA DỰ ÁN (GANTT CHART) .................................................................... 6
1.5. NGUYÊN LÍ HOẠT ĐỘNG CỦA HỆ TRUYỀN ĐỘNG ............................................................... 6
1.5.1. Hệ truyền động điện gồm: .............................................................................................................. 7
a) Phần Cơ: ............................................................................................................................................... 7
b) Phần Điện: ........................................................................................................................................... 7
1.5.2. Nguyên lý hoạt động: ..................................................................................................................... 7
CHƯƠNG 2: TÍNH CHỌN ĐỘNG CƠ THEO TẢI................................................................................ 8
2.1. LỰA CHỌN TẢI: ............................................................................................................................. 8
2.2. THÔNG SỐ TẢI: .............................................................................................................................. 8
2.2.1. Phân tích các thành phần lực của hệ: ............................................................................................. 8
2.2.2. Đồ thị và tốc độ dự kiến của tải ..................................................................................................... 8
2.3. QUY ĐỔI THÀNH PHẦN MOMEN TẢI VÀ MOMEN ĐỘNG LƯỢNG CỦA HỆ .................... 9
2.3.1. Momen tải: ..................................................................................................................................... 9
2.3.2. Tính chọn động cơ: ...................................................................................................................... 10
a) Tốc độ góc: ........................................................................................................................................ 10
b) Momen đầu trục động cơ: .................................................................................................................. 11
c) Công suất động cơ: ............................................................................................................................ 12
d) Momen đẳng trị: ................................................................................................................................ 13
e) Công suất cơ đẳng trị: ........................................................................................................................ 13
f) Chọn động cơ: .................................................................................................................................... 14
2.4. TÍNH CHỌN GEARBOX, KIỂM NGHIỆM ĐỘNG CƠ VÀ GEARBOX ................................... 15
2.4.1. Chọn Gearbox .............................................................................................................................. 15 lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG
2.4.2. Kiểm nghiệm lại Gearbox ............................................................................................................ 16
2.4.3. Kiểm nghiệm lại động cơ đã chọn ............................................................................................... 16
2.5. TỔNG QUAN VỀ ĐỘNG CƠ ĐIỆN MỘT CHIỀU KÍCH TỪ ĐỘC LẬP ................................... 18
2.5.1. Phần tĩnh (Stato): ......................................................................................................................... 18
2.5.2. Phần quay (Roto): ........................................................................................................................ 18
2.5.3. Đặc tính cơ ................................................................................................................................... 18
2.6. KIỂM NGHIỆM VÀ ĐÁNH GIÁ CHẤT LƯỢNG ĐỘNG CƠ THÔNG QUA MÔ PHỎNG ..... 19
MATLAB ........................................................................................................................................... 19
2.6.1. Kiểm nghiệm các thông số điện cơ của động cơ .......................................................................... 19
2.6.2. Kiểm nghiệm động cơ bằng mô phỏng MATLAB/SIMULINK ................................................. 19
2.6.2.1. Lựa chọn của nhóm: .................................................................................................................. 19
2.6.2.2. Thông số động cư dựa theo datasheet và tính toán: .................................................................. 19
CHƯƠNG 3: PHÂN TÍCH VÀ TÍNH CHỌN MẠCH ĐIỆN TỬ CÔNG SUẤT ................................. 21
3.1. TÍNH CHỌN BỘ BIẾN ĐỔI CÔNG SUẤT .................................................................................. 21
3.1.1. Yêu cầu của bộ biến đổi công suất ............................................................................................... 21
3.1.2. Tổng quan về bộ chỉnh lưu kép 3 pha .......................................................................................... 21
3.1.3. Tính chọn linh kiện cho bộ biến đổi ............................................................................................ 24
3.1.4. Tính chọn mạch lọc LC ................................................................................................................ 24
3.2. MÔ PHỎNG MẠCH ĐIỆN TỬ CÔNG SUẤT .............................................................................. 25
3.3. CHỌN PHƯƠNG PHÁP ĐIỀU KHIỂN BỘ BIẾN ĐỔI CÔNG SUẤT ....................................... 26
3.4. MÔ PHỎNG HỆ TRUYỀN ĐỘNG ĐIỆN ĐỘNG CƠ 1 CHIỀU KÍCH TỪ ĐỘC LẬP HOÀN .. 28
CHỈNH ............................................................................................................................................... 28
3.4.1. Bộ điều khiển góc điều khiển bằng điện áp chỉnh lưu của nguyên tắc arccos ............................. 28
3.4.2. Kiểm tra đánh giá kết quả mô phỏng ........................................................................................... 29
a) Kết quả mô phỏng tốc độ ................................................................................................................... 29
b) Kết quả mô phỏng momen ................................................................................................................. 30
c) Đánh giá chất lượng toàn hệ thống .................................................................................................... 30
MỤC LỤC HÌNH ẢNH
Hình 1.1 Mô hình mô phỏng của hệ truyền động điện cho băng chuyền............................................6 lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG
Hình 1.2 Giản đồ Grantt dự án.............................................................................................................7
Hình 1.3 Nguyên lý hoạt động của băng tải.........................................................................................8
Hình 1.4 Sơ đồ tổng quát của hệ truyền động điện..............................................................................9
Hình 2.1 Các thành phần lực và momen của hệ................................................................................10
Hình 2.2 Đồ thị mong muốn của tải...................................................................................................11
Hình 2.3 Tải chuyển động tịnh tiến...................................................................................................11
Hình 2.4 Đồ thị tốc độ góc mong muốn của tải.................................................................................12
Hình 2.5 Đồ thị momen của động cơ.................................................................................................13
Hình 2.6 Đồ thị công suất động cơ....................................................................................................14
Hình 2.7 Động cơ S9D120-24CH......................................................................................................15
Hình 2.8 Hình ảnh gearbox................................................................................................................17
Hình 2.9 Sơ đồ mô phỏng hoạt động của động cơ.............................................................................20
Hình 2.10 Đồ thị hoạt động của động cơ...........................................................................................21
Hình 3.1 Sơ đồ mạch chỉnh lưu kép 3 pha.........................................................................................22
Hình 3.2 Sơ đồ mô tả chỉnh lưu kép..................................................................................................22
Hình 3.3 Nguyên lí hoạt động chỉnh lưu cầu 3 pha...........................................................................24
Hình 3.4 Sơ đồ mô phỏng bộ biến đổi công suất...............................................................................26
Hình 3.5 Số liệu Step.........................................................................................................................26
Hình 3.6 Đồ thị mô phỏng.................................................................................................................27
Hình 3.7 Nguyên tắc điều khiển arccos..............................................................................................27
Hình 3.8 Sơ đồ mô phỏng hệ truyền động hoàn chỉnh......................................................................28
Hình 3.9 Bộ điều khiển góc điều khiển..............................................................................................28
Hình 3.10 Chi tiết điều khiển góc alpha............................................................................................29
Hình 3.11 Kết quả mô phỏng tốc độ..................................................................................................29
Hình 3.12 Kết quả mô phỏng momen................................................................................................30
MỤC LỤC BẢNG SỐ LIỆU
Bảng 1.1 Bảng tóm tắt nhiệm vụ..........................................................................................................7
Bảng 2.1. Bảng thông số của động cơ S9D120-24CH.......................................................................16
Bảng 2.2 Bảng thông số tính toán......................................................................................................20
Bảng 3.1. Bảng thông số Thyristor....................................................................................................25 lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG
CHƯƠNG 1: TỔNG QUAN VỀ DỰ ÁN
1.1. ĐỀ TÀI CỦA NHÓM
- Tên đề tài: Thiết kế động cơ 1 chiều kích từ độc lập cho băng chuyền
- Loại động cơ sử dụng: Động cơ 1 chiều kích từ độc lập
- Loại tải nhóm sử dụng: tải tịnh tiến
- Cơ cấu hoạt động: tải băng chuyền
Hình 1.1 Mô hình mô phỏng của hệ truyền động điện cho băng chuyền
1.2. DANH SÁCH KIỂM TRA PHẠM VI DỰ ÁN
1.2.1. Mục tiêu của dự án:
Nhóm muốn hiểu biết rõ hơn về nguyên lí hoạt động cũng như là ứng dụng thực tế khi đưa vào
hoạt động, áp dụng kiến thức liên môn đó là: “truyền động điện - điện tử công suất”, tính toán chọn
động cơ thiết bị phù hợp cấp cho tải, từ đó giúp các thành viên trong nhóm nắm vững được kiến
thức từ lý thuyết để áp dụng ra thực tế.
Nắm vững kỹ năng làm việc nhóm, thành thạo các phần mềm như MATLAB để mô phỏng hệ thống.
1.2.2. Sản phẩm của dự án:
Bản vẽ mô hình hệ thống tải, mạch nguyên lý, sơ đồ mô phỏng, mô phỏng bộ điều khiển động
cơ khi mang tải, đo lường giá trị tốc độ, dòng điện và phần giám sát.
1.2.3. Các yêu cầu về kỹ thuật:
Các kết quả mô phỏng phải thể hiện chính xác các tính chất của tải, động cơ để hạn chế tối đa các
lỗi kỹ thuật trong quá trình xây dựng mạch và mô hình thực tế.
1.3. BẢNG TÓM TẮT CÁC CÔNG VIỆC Ngày kết Nhiệm vụ Ngày Thành viên Thời gian bắt đầu thúc thực hiện Phân chia nhóm 15/8/2024 15/8/2024 1 lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG Lựa chọn tải 22/8/2024 22/8/2024 1 Cả nhóm
Lựa chọn phương pháp điều khiển động cơ 29/8/2024 12/9/2024 14 Cả nhóm
Lựa chọn mạch công suất điều khiển tốc độ điều khiển động cơ 15/9/2024 26/9/2024 12 Cả nhóm Trương Thắng
Xây dựng mô hình mô phỏng 3/10/2024 30/10/2024 28 Đình Thuận Văn Nhật Hiếu Thành
Mô phỏng và thiết kế bộ điều khiển 31/10/2024 13/11/2024 14 Hoàng Minh
Lắp mạch, kiểm tra và đánh giá 14/11/2024 21/11/2024 8 cả nhóm Trương Thắng Làm file word 28/11/2024 20/12/2024 22 Hiếu Thành Đình Thuận Hoàn thiện file word Hoàng Minh 21/12/2024 23/12/2024 3 Văn Nhật Báo cáo 30/12/2024 30/12/2024 1 cả nhóm
Bảng 1.1 Bảng tóm tắt nhiệm vụ
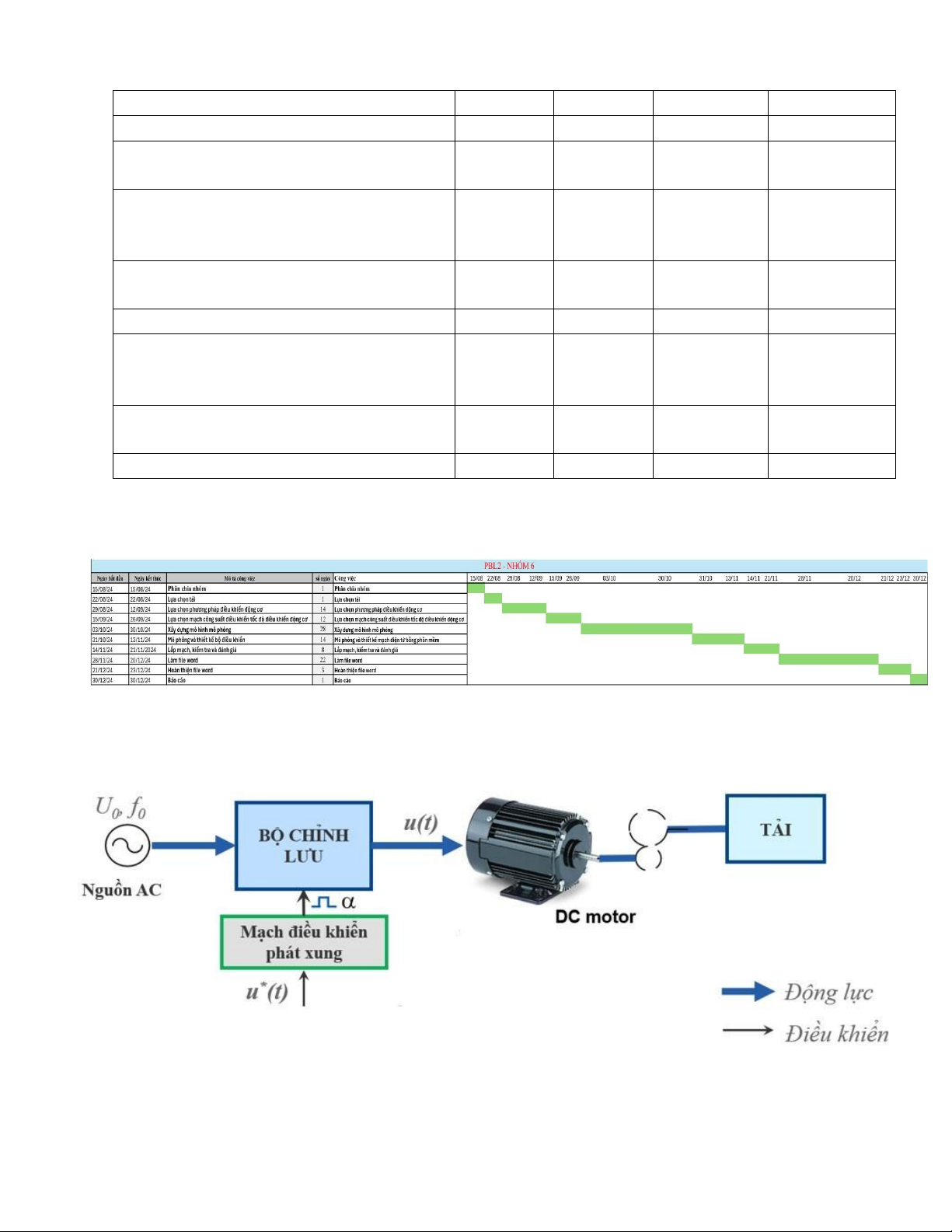
1.4. GIẢN ĐỒ GANTT CỦA DỰ ÁN (GANTT CHART)
Hình 1.2 Giản đồ Grantt dự án
1.5. NGUYÊN LÍ HOẠT ĐỘNG CỦA HỆ TRUYỀN ĐỘNG
Hình 1.3 Nguyên lý hoạt động của băng tải lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG
1.5.1. Hệ truyền động điện gồm: a) Phần Cơ:
- Tải: gồm các thông số khối lượng tải, bán kính trục qua đó xác định được thông số dự kiến của
tải để xác định được giá trị đặt đem vào bộ điều khiển để so sánh với giá trị thực của động cơ. b) Phần Điện: - Bộ điều khiển:
+ Bên trong bộ điều khiển được lập trình bởi những thuật toán điều khiển, thực hiện so sánh giữ giá
trị đặt vào với giá trị thực về tốc độ về vị trí, giá trị thực thì được đo bởi cảm biến - giá trị mong
muốn được gửi đến từ bộ điều khiển cấp trên
+Thực hiện tính toán ra giá trị điện áp cần thiết cho đầu vào của động cơ.
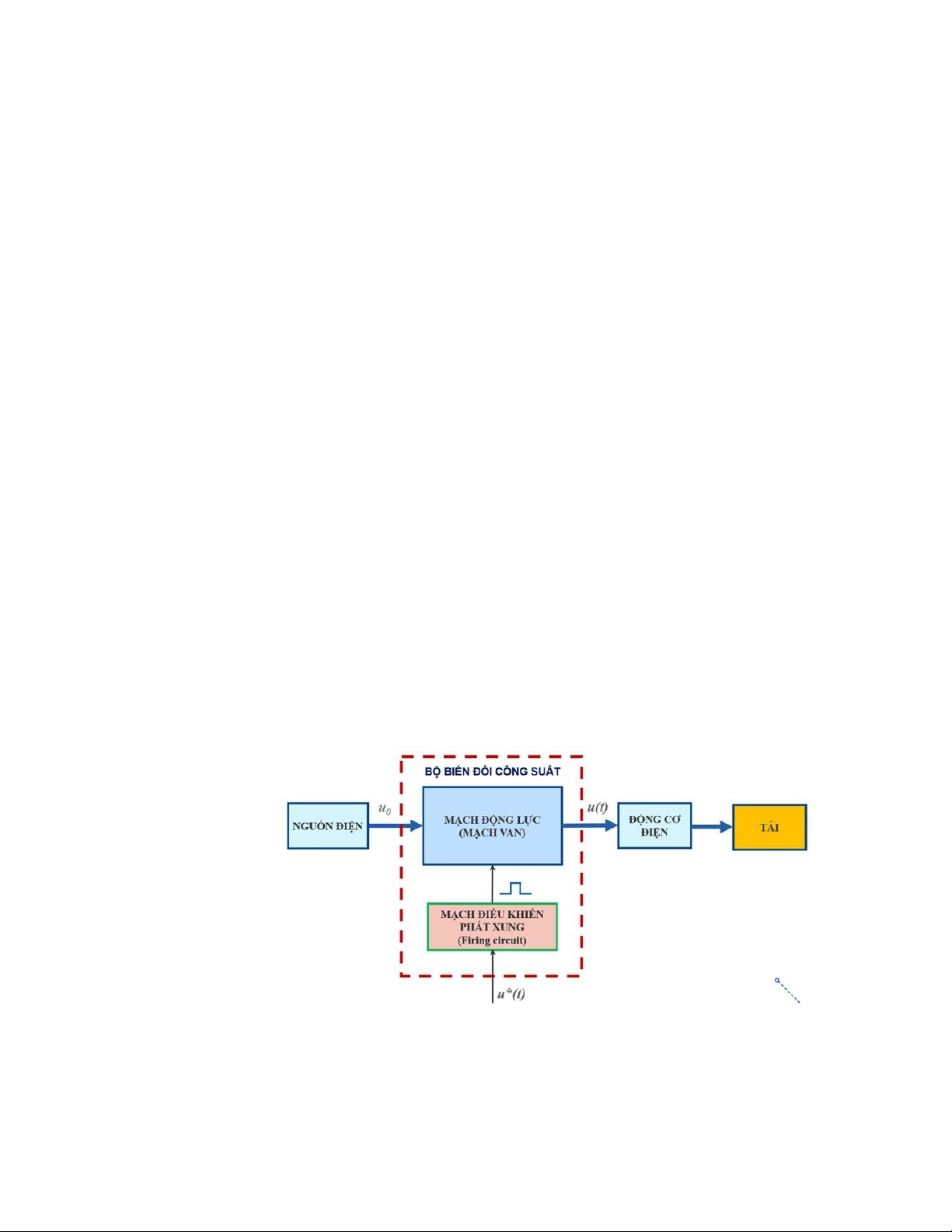
- Bộ biến đổi công suất gồm 2 phần:
+ Phần mạch động lực (phần mạch van)
+ Phần mạch điều khiển phát xung: biến đổi điện áp xoay chiều từ nguồn biến đổi thành điện áp một
chiều, thay đổi điện áp một chiều (bộ chỉnh lưu có điều khiển) theo tín hiệu điều khiển. - Động cơ:
+ Là phần trung gian giữa phần điện và phần cơ, nhận điện áp từ bộ biến đổi công suất sau đó truyền
ra cho tải để hoạt động.
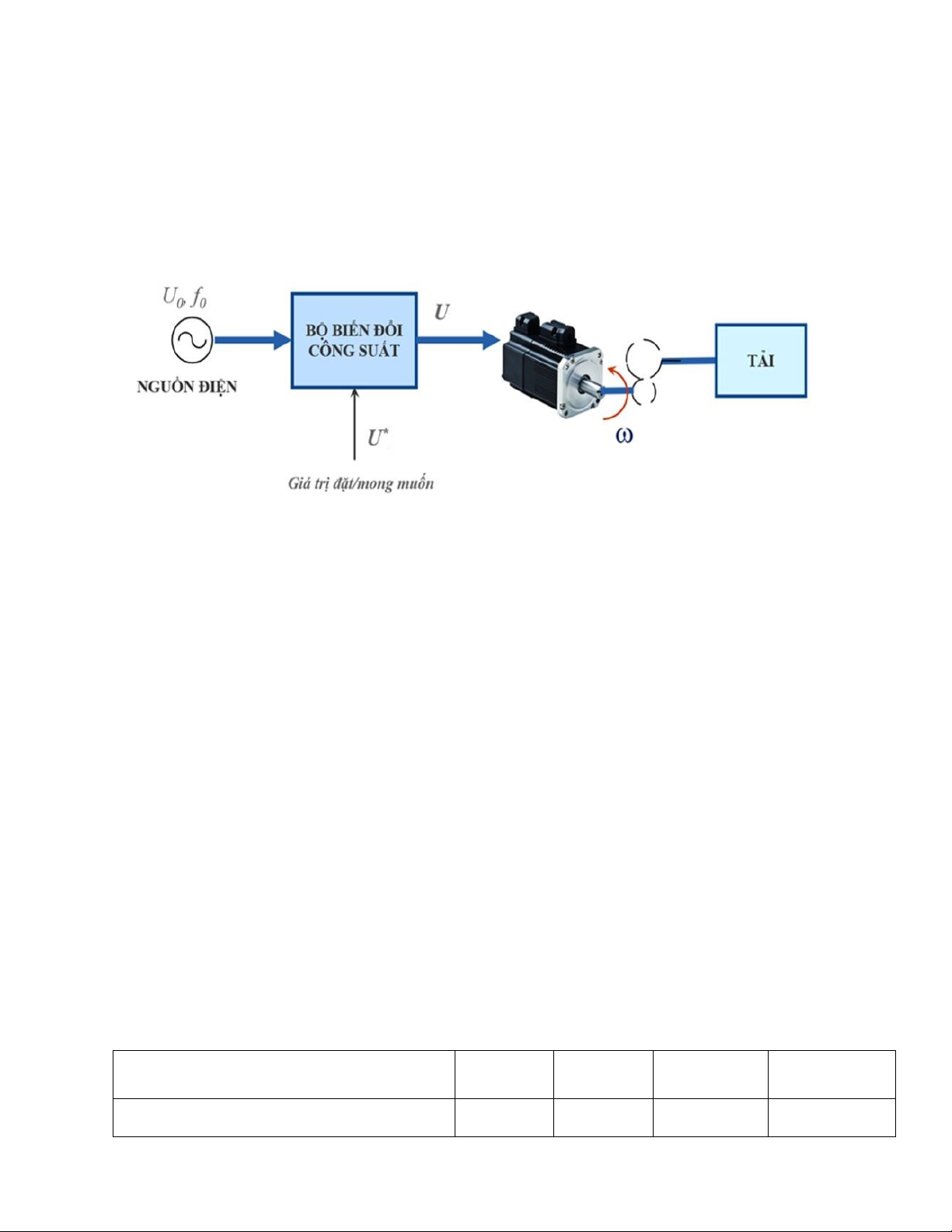
1.5.2. Nguyên lý hoạt động:
Trung tâm của hệ truyền động điện là động cơ điện , phần giữa trục rotor được nối truyền động
ra tải qua cơ cấu ghép , để cấp điện cho động cơ thì giá trị đặt vào là giá trị biên độ điện áp , để
truyền điện áp phù hợp cho tải thì ta có bộ biến đổi công suất nhằm biến đổi từ dạng năng lượng cố
định sang dạng năng lượng phù hợp để cấp cho động cơ ,điều khiển tốc độ và moment của động cơ
truyền cho tải theo yêu cầu của tải.
Hình 1.4 Sơ đồ tổng quát của hệ truyền động điện lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG
CHƯƠNG 2: TÍNH CHỌN ĐỘNG CƠ THEO TẢI
2.1. LỰA CHỌN TẢI:
Nhóm đã quyết định chọn tải băng chuyền chuyển động tịnh tiến cho dự án lần này. Vì đây là
một loại tải được sử dụng nhiều trong thực tế như trong các nhà máy, khu công nghiệp.
2.2. THÔNG SỐ TẢI:
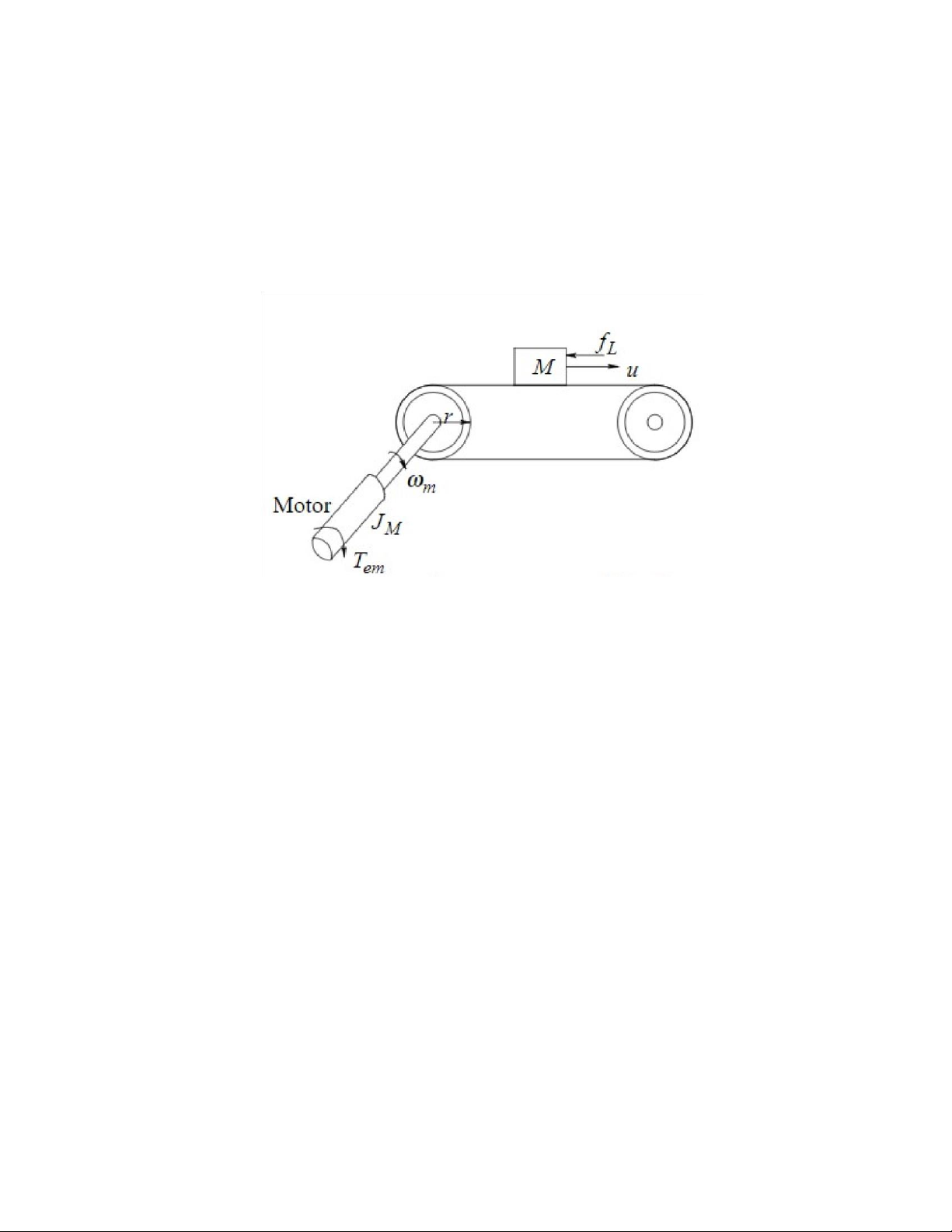
2.2.1. Phân tích các thành phần lực của hệ:
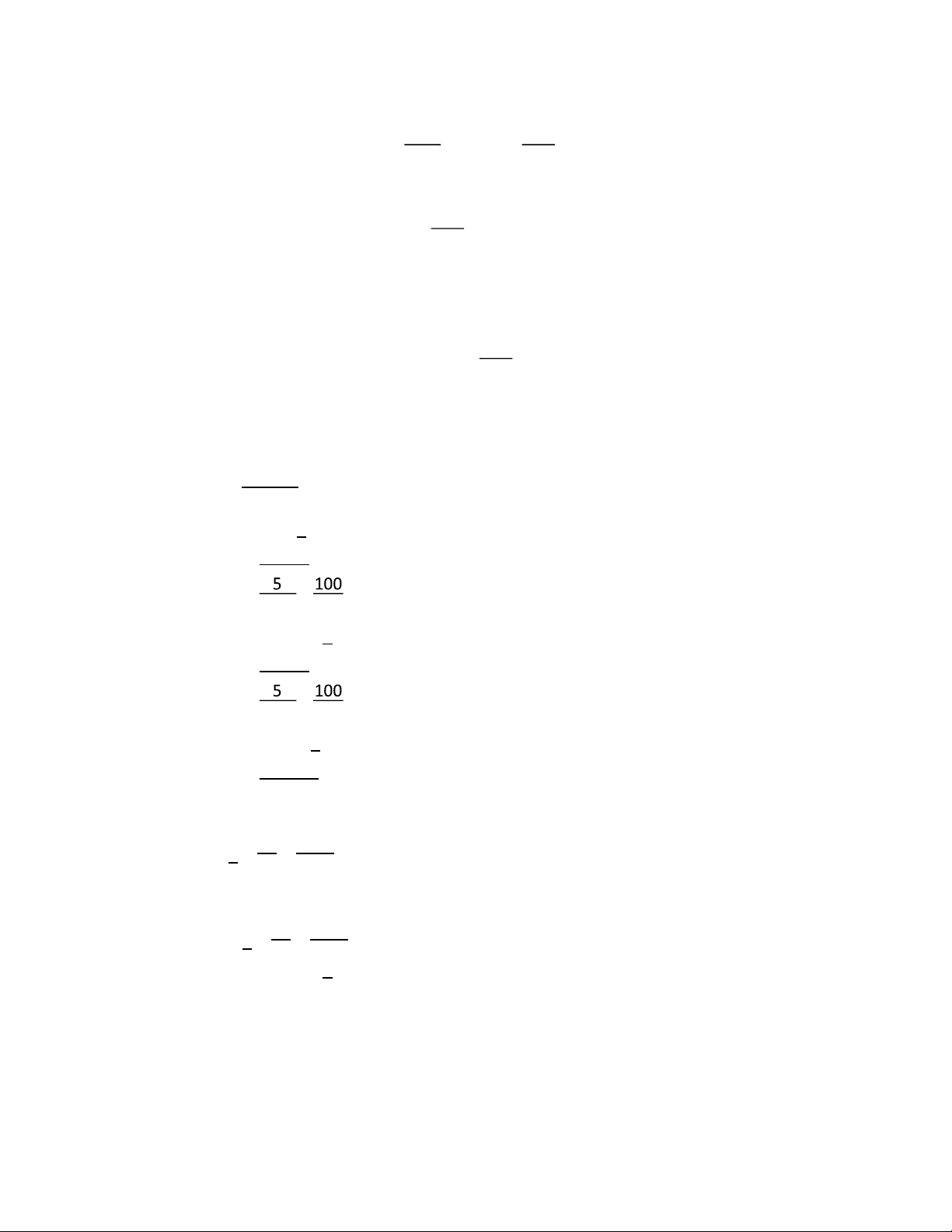
Hình 2.1 Các thành phần lực và momen của hệ Các thông số của tải: -
Khối lượng tải: M = 4 (Kg) -
Bán kính pulley: r = 0,15 (m) -
J M: Momen quán tính trên trục động cơ (Kg.m2) -
ωm: Tốc độ quay trên trục động cơ (rad/s) -
u: Tốc độ chuyển động của tải (m/s) -
T em : Mô men điện từ của động cơ (Nm) -
f L : Ngoại lực (N)
Theo yêu cầu ta có tải ở dạng băng tải, để đáp ứng yêu cầu thì trục rotor của động cơ cần phải quay
với tốc độ mong muốn và truyền động cho băng tải.
2.2.2. Đồ thị và tốc độ dự kiến của tải Đồ thị của tải lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG
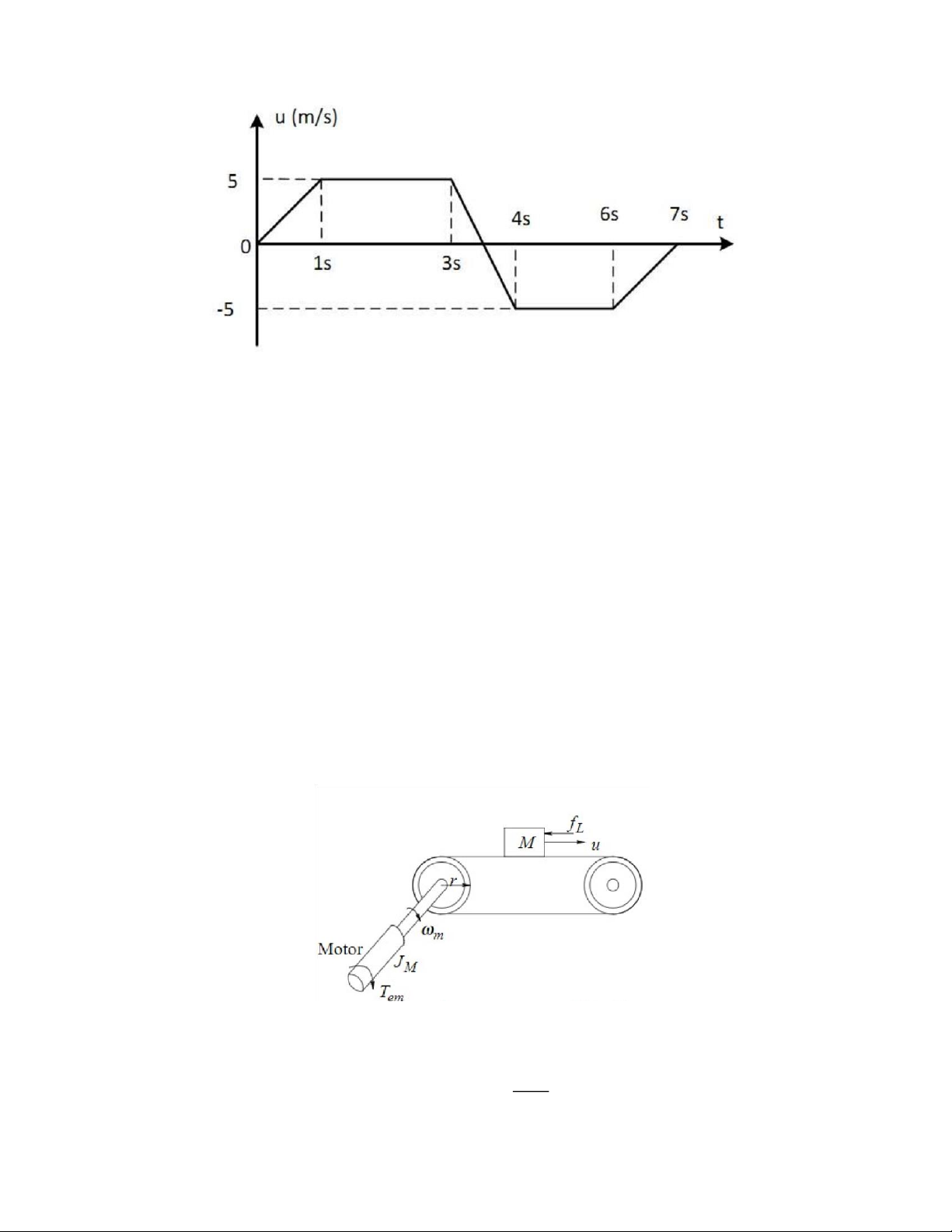
Hình 2.2 Đồ thị mong muốn của tải
Từ đồ thị tốc độ mong muốn của tải được mô tả ở Hình 2.2 ta xác định được các giai đoạn hoạt động của động cơ như sau:
- Trong giai đoạn từ 0 - 1s, động cơ được cấp điện, tốc độ động cơ tăng dần từ 0 (m/s) cho đến 5 (m/s).
- Trong giai đoạn từ 1 - 3s, động cơ quay với tốc độ xác lập bằng 5 (m/s).
- Trong giai đoạn từ 3 - 3.5s, động cơ rơi vào trạng thái hãm, tốc độ động cơ giảm dần từ 5 (m/s) về 0 (m/s).
- Trong giai đoạn từ 3.5 - 4s, tốc độ động cơ bắt đầu tăng dần từ 0 cho đến 5(m/s) theo chiều ngược lại.
- Trong giai đoạn từ 4 - 6s, động cơ quay với tốc độ xác lập 5 (m/s).
- Trong giai đoạn từ 6 - 7s, động cơ rơi vào trạng thái hãm, tốc độ động cơ giảm dần từ 5 (m/s) về 0 (m/s).
2.3. QUY ĐỔI THÀNH PHẦN MOMEN TẢI VÀ MOMEN ĐỘNG LƯỢNG CỦA HỆ 2.3.1. Momen tải:
Hình 2.3 Tải chuyển động tịnh tiến 2 dωm
T L=r.f =r M dt
- Ta có Momen cần mà động cơ phải cung cấp được tính như sau: lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG
dωm 2 dωm T em=J M dt +r M dt dωm
- Với J M là momen quán tính của hệ và J M
dt là momen yêu cầu để động cơ quay, vì giá trị này
rất nhỏ nên ta tạm thời bỏ qua.
Vậy ta tính Momen cần để động cơ cung cấp cho tải theo từng giai đoạn với công thức: 2 dωm T em=r M dt
2.3.2. Tính chọn động cơ: a) Tốc độ góc: u 0
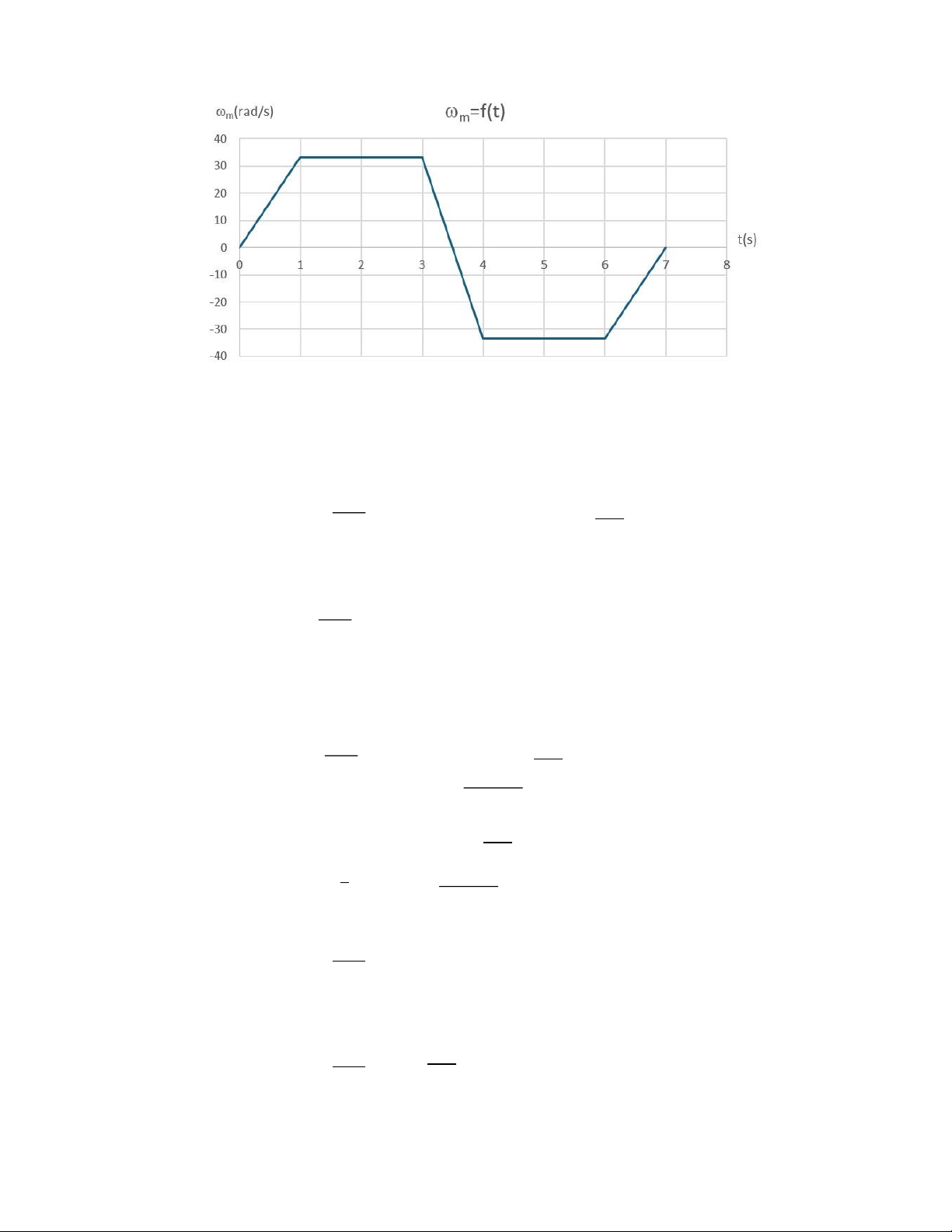
- Tại t=0: ωm = = = 0 (rad/s) r 0,15 u
- Tại t=1: ωm= = = (rad/s) r 0,15 3 u
- Tại t=3: ωm= = = (rad/s) r 0,15 3 u 0
- Tại t=3,5: ωm = = = 0 (rad/s) r 0,15 −5 −100
- Tại t=4: ωm = u = = (rad/s) r 0,15 3 −5 −100
- Tại t=6: ωm = u = = (rad/s) r 0,15 3 u
- Tại t=7: ωm = = 0 (rad/s) r lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG
Hình 2.4 Đồ thị tốc độ góc mong muốn của tải
b) Momen đầu trục động cơ: 2
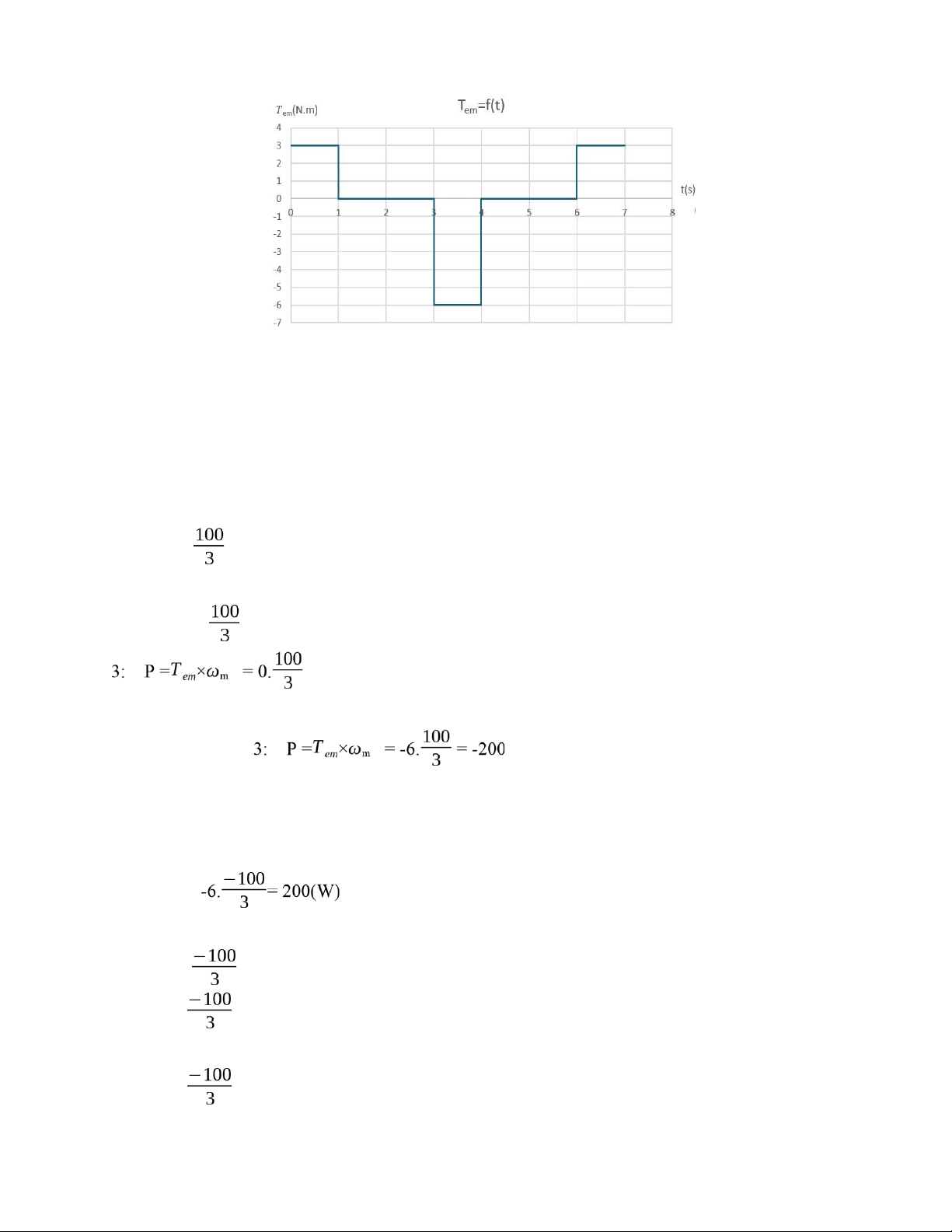
dωm 0,152.4. 100 = 3 (N.m)
- Tại 0s ≤ t ≤ 1s: T em=r M dt = 3 2 dωm 2 0= 0 (N.m)
- Tại 1s ≤ t ≤ 3s: T em=r M dt = 0,15 .4.
- Tại 3s ≤ t≤ 3,5s: T em=r2M
dωdtm = 0,152.4. 0−0.51003 = - 6 (N.m) ω 0 100 −
- Tại 3,5s ≤ t ≤ 4s: T em=r2M dtm = 0,152.4. 0.53 = - 6 (N.m) 2 ωm 2 = 0 (N.m)
- Tại 4s ≤ t ≤ 6s: T em=r M dt = 0,15 .4.0
2 ωm 0,152.4. 100 = 3 (N.m)
- Tại 6s ≤ t ≤7s: T em=r M dt = 3 lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG
Hình 2.5 Đồ thị momen của động cơ
c) Công suất động cơ:
Ta có công thức tính công suất của động cơ: P =T em×ωm -
Giai đoạn 1: 0s ≤ t ≤ 1s t=0: P =T
em×ωm = 3.0 = 0 (W) t=1: P =T em×ωm = 3. = 100 (W) -
Giai đoạn 2: 1s ≤ t ≤ 3s t=1: P =T em×ωm = 0. = 0 (W) t= = 0 (W) -
Giai đoạn 3: 3s ≤ t ≤ 3,5s t= (W)
t=3,5: P =T em ×ωm = -6.0 = 0 (W) -
Giai đoạn 4: 3,5s ≤ t ≤ 4s t=3,5: P =T
em ×ωm = -6.0 = 0 (W) t=6: P =T em ×ωm = -
Giai đoạn 5: 4s ≤ t ≤ 6s t=4: P =T em ×ωm = 0. = 0 (W) t=6: P =T em ×ωm = 0. = 0 (W) -
Giai đoạn 6: 6s ≤ t ≤ 7s t=6: P =T em ×ωm = 3. = -100(W)
t=7: P =T em ×ωm = 3.0 = 0 (W) lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG
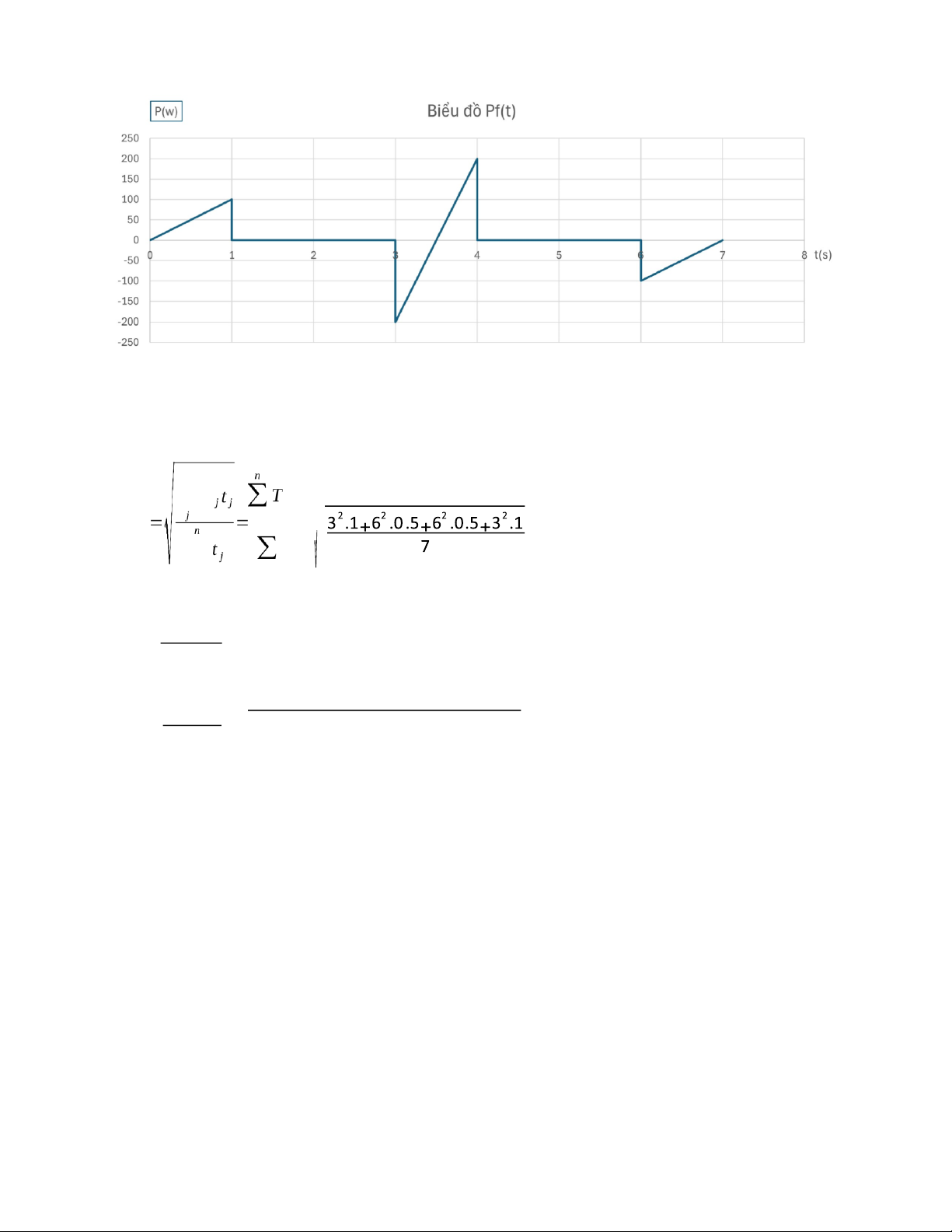
Hình 2.6 Đồ thị công suất động cơ d) Momen đẳng trị: 2 T emđt ¿ = 2,78 (N.m) j
e) Công suất cơ đẳng trị: n ∑ P2j t j Pđt=j n
=√1002.1+(−200)2.0,5+2002.0,5+¿¿¿ = 92,58 (W) √∑ t j j
Ta nhân thêm hệ số dự trữ k=1,3
Vậy T emđt= 2,78 x 1,3 = 3,61 (N.m)
Pđt= 92,58 x 1,3= 120,354 (W)
Ta chọn hiệu suất động cơ là 90%
Vậy ta có công suất động cơ là P = 108,3 (W) lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG f) Chọn động cơ:
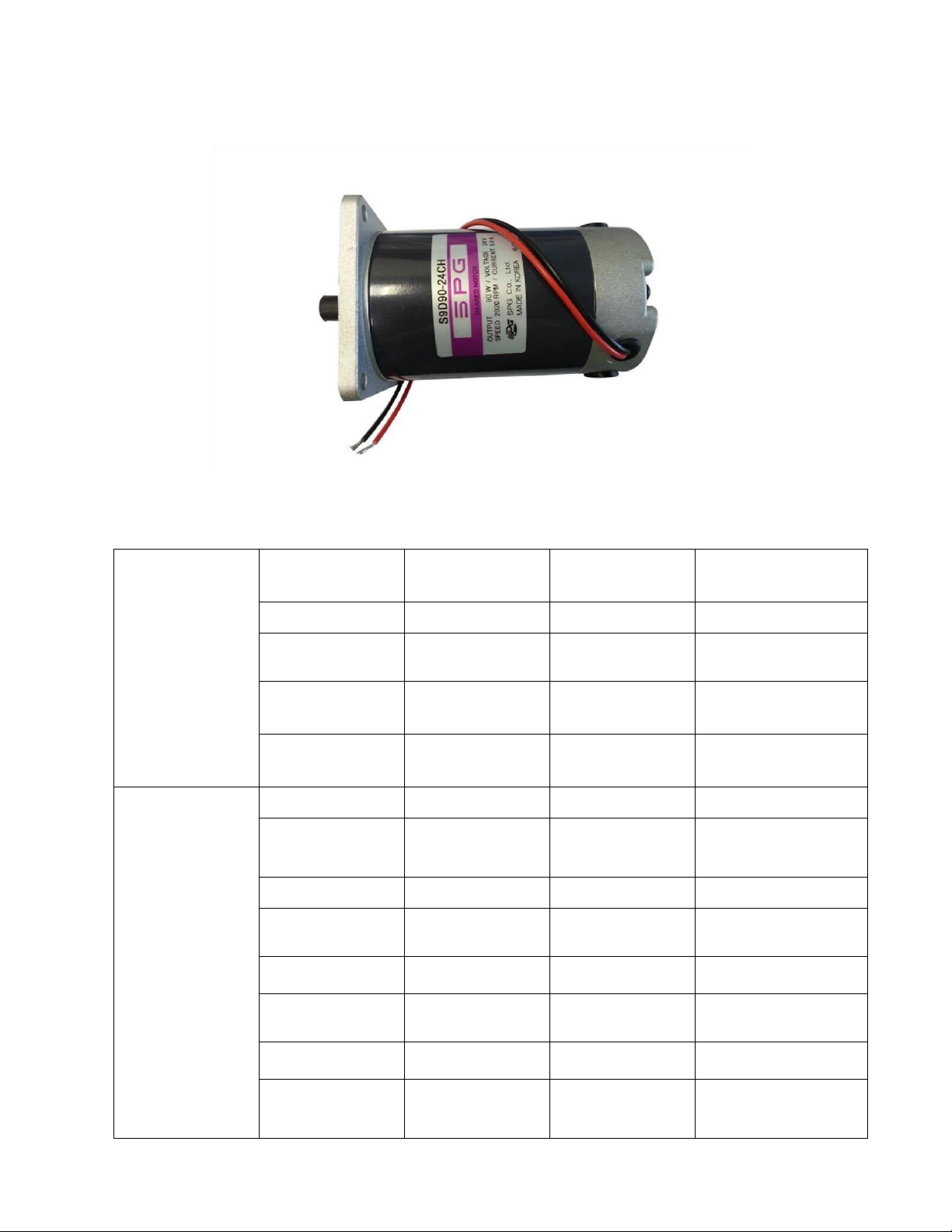
Với công suất 108,3 W ta chọn động cơ S9D120-24CH có công suất 120 W.
Hình 2.7 Động cơ S9D120-24CH Yêu cầu của Momen định Tem đt N.m 3,61 tải mức Momen cực đại Tmax N.m 6 Công suất Pđm W 108,3 định mức Công suất cực Pmax W 200 đại Tốc độ mong n Vòng/phút 287 muốn Động cơ Công suất Pđm W 120 S9D120-24 Tốc độ định nđm Vòng/phút 2920 mức Điện áp Va V 24 Dòng điện Iđm A 7,1 định mức Hiệu suất η 0,9 Momen định Tđm N.m 0,4 mức Số cực P 2 Điện trở phần Ra Ω 0,499 ứng lOMoAR cPSD| 22014077 Điện cảm phần La H 5,8.10−5 ứng
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ T Mome RU n quá YỀN ĐỘ n NG ĐIỆ J 6 M N G kg VHD: m2 TS. NGUYỄN K 6,2x10HÁNH QUAN G tính Dòng điện phần Ia đm A P 120 ứng
I ađm=η.U dm=0,9.24 =
Bảng 2.1. Bảng thông số của động cơ S9D120-24CH
2.4. TÍNH CHỌN GEARBOX, KIỂM NGHIỆM ĐỘNG CƠ VÀ GEARBOX 2.4.1. Chọn Gearbox
- Mặt khác để đáp ứng yêu cầu về momen và tốc độ của tải, ta sử
dụng thêm hộp số (gearbox) vớitỉ số truyền được tính theo công thức: Temđt 3,61 - Tỉ số truyền K = = =10 T đm 0,4
Vậy ta chọn gearbox có tỉ lệ 10 :1
+ Tỉ số truyền i: 1:10 +
Tốc độ đầu vào: 4000 rpm.
+ Tốc độ đầu ra: 400 rpm.
+ Momen đầu trục: 4,8 N.m. + Hiệu suất: 87% lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG
Hình 2.8 Hình ảnh gearbox
2.4.2. Kiểm nghiệm lại Gearbox
- Momen của động cơ T dm= 0,4 (N.m) với gearbox tỉ lệ 10:1
=> Momen qua Gearbox = 0,4 x 10 = 4 lớn hơn momen yêu cầu của tải T emđt= 3,61(N.m)
- Tốc độ của động cơ là nđm= 2920 (rpm)
=> Tốc độ qua gearbox = 2920 /10 = 292 (rpm) lớn hơn tốc độ của động cơ n = 286,5 (rpm)
2.4.3. Kiểm nghiệm lại động cơ đã chọn
Sau khi chọn được động cơ ta có giá trị Momen quán tính JM=0,0000062 kg.m2 , ta thay giá trị này
vào để tính lại giá trị momen T em Trong giai đoạn từ 0 – 100 1s : T em=0,152.4. 3 +0,0000062. = 3,0025 (N.m) Trong giai đoạn từ 1 – 0
3s : T em=0,152.4. 1 +0,0000062. = 0 (N.m) 100 100
Trong giai đoạn từ 3 - 3,5s : T em=0,15 .4. 2
0− 3 +0,0000062. 0− 3 = -6,0049 (N.m) 0,5 0,5 100 100 .4.
Trong giai đoạn từ 3,5 – 4s : T em=0,152 0− 3 0− +0,0000062. 3 = -6,0049 (N.m) 0,5 0.5 lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG Trong giai đoạn từ 4 – 0
6s : T em=0,152.4. 2 +0,0000062. = 0 (N.m) Trong giai đoạn từ 6 – 100 7s : T em=0,152.4. 3 +0,0000062. = 3,0025 (N.m) T emđt
Hệ số dự trữ Kdt=1,3
Vậy T emđt=3,61 (N.m) - Công suất động cơ:
Ta có công thức tính công suất của động cơ: P =T em×ωm -
Giai đoạn 1: 0s ≤ t ≤ 1s t=0: P =T em×ωm =
3,0025.0 = 0 (W) t=1: P =T em×ωm = 3,0025. = 100,08 (W) -
Giai đoạn 2: 1s ≤ t ≤ 3s t=1: P =T em×ωm = 0. = 0 (W) t= = 0 (W) -
Giai đoạn 3: 3s ≤ t ≤ 3,5s t= ,16 (W)
t=3,5: P =T em×ωm = -6,0049.0 = 0 (W) -
Giai đoạn 4: 3,5s ≤ t ≤ 4s t=3,5: P =T em ×ωm = - 6,0049.0 = 0 (W)
t=4: P =T em×ωm = ,16 (W) -
Giai đoạn 5: 4s ≤ t ≤ 6s t=4: P =T em ×ωm = 0.
= 0 (W) t=6: P =T em ×ωm = 0. = 0 (W) -
Giai đoạn 6: 6s ≤ t ≤ 7s lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG t=6: P =T em × ,08 (W)
t=7: P =T em ×ωm = 3,0025.0 = 0 (W) Pdt
Lấy hệ số dự trữ Kdt=1,3 nên ta có Pdt=120,45(W)
Chọn hiệu suất động cơ là 90% Vậy ta có P = 108,41 (W)
2.5. TỔNG QUAN VỀ ĐỘNG CƠ ĐIỆN MỘT CHIỀU KÍCH TỪ ĐỘC LẬP
2.5.1. Phần tĩnh (Stato):
- Đây là phần đứng yên của máy.
- Cực từ chính là bộ phận sinh ra từ trường gồm có lõi sắt cực từ và dây quấn kích
từ lồng ngoài lõi sắt kích từ.
- Cực từ phụ được đặt giữa các cực từ chính và dùng để cải thiện đổi chiều. - Ngoài
ra còn có cơ cấu chổi than để đưa dòng điện từ phần quay ra ngoài. [1];[2]
2.5.2. Phần quay (Roto): -
Còn được gọi là phần ứng gồm lõi thép và dây quấn phần ứng. -
Lõi sắt phần ứng dùng để dẫn từ, thường dùng những tấm thép kỹ thuật điện. -
Dây quấn phần ứng là phần sinh ra sức điện động và có dòng điện chạy qua. -
Dây quấn phần ứng thường làm bằng dây đồng có bọc cách điện. -
Ngoài ra còn có cổ góp dùng để đổi chiều dòng điện xoay chiều thành dòng điện một chiều. [1];[2]
2.5.3. Đặc tính cơ
- Phương trình đặc tính cơ - điện
ωm=Uk ϕa - Rak+ϕRaf .Ia - Phương
trình đặc tính cơ ωm=Uk ϕa -
Rak+ϕR2 af .T em lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG
2.6. KIỂM NGHIỆM VÀ ĐÁNH GIÁ CHẤT LƯỢNG ĐỘNG CƠ THÔNG QUA MÔ PHỎNG MATLAB
2.6.1. Kiểm nghiệm các thông số điện cơ của động cơ -
Sau khi chọn được động cơ và hộp giảm tốc ta sẽ tính toán lại momen và công suất yêu cầu
củatải để kiểm nghiệm. -
Lúc này ta xác định momen điện từ yêu cầu của tải là: dωm 2 d ωm T em=J M dt +r M dt
2.6.2. Kiểm nghiệm động cơ bằng mô phỏng MATLAB/SIMULINK
2.6.2.1. Lựa chọn của nhóm: -
Sau khi thảo luận, nhóm đã đưa ra quyết định sử dụng phương án mô phỏng động cơ bằngSimulink. -
Ta kiểm nghiệm việc cấp nguồn cho động cơ để hoạt động được với tải bằng cách thay đổi
thôngsố nguồn cấp trực tiếp cho động cơ và thay đổi sơ đồ mạch điện. -
Biểu diễn trên đồ thị các kết quả kiểm nghiệm về tín hiệu dòng điện, điện áp, mô-men, tốc
độquay, từ thông,… phân tích các kết quả đáp ứng, kiểm nghiệm và hiệu chỉnh lại động cơ, tải .
2.6.2.2. Thông số động cơ dựa theo datasheet và tính toán: Va 24 Tdm 4 Ra 0,499 La 5,8.10-5 Kϕ 0,067 JM 0,0000062
Bảng 2.2 Bảng thông số tính toán
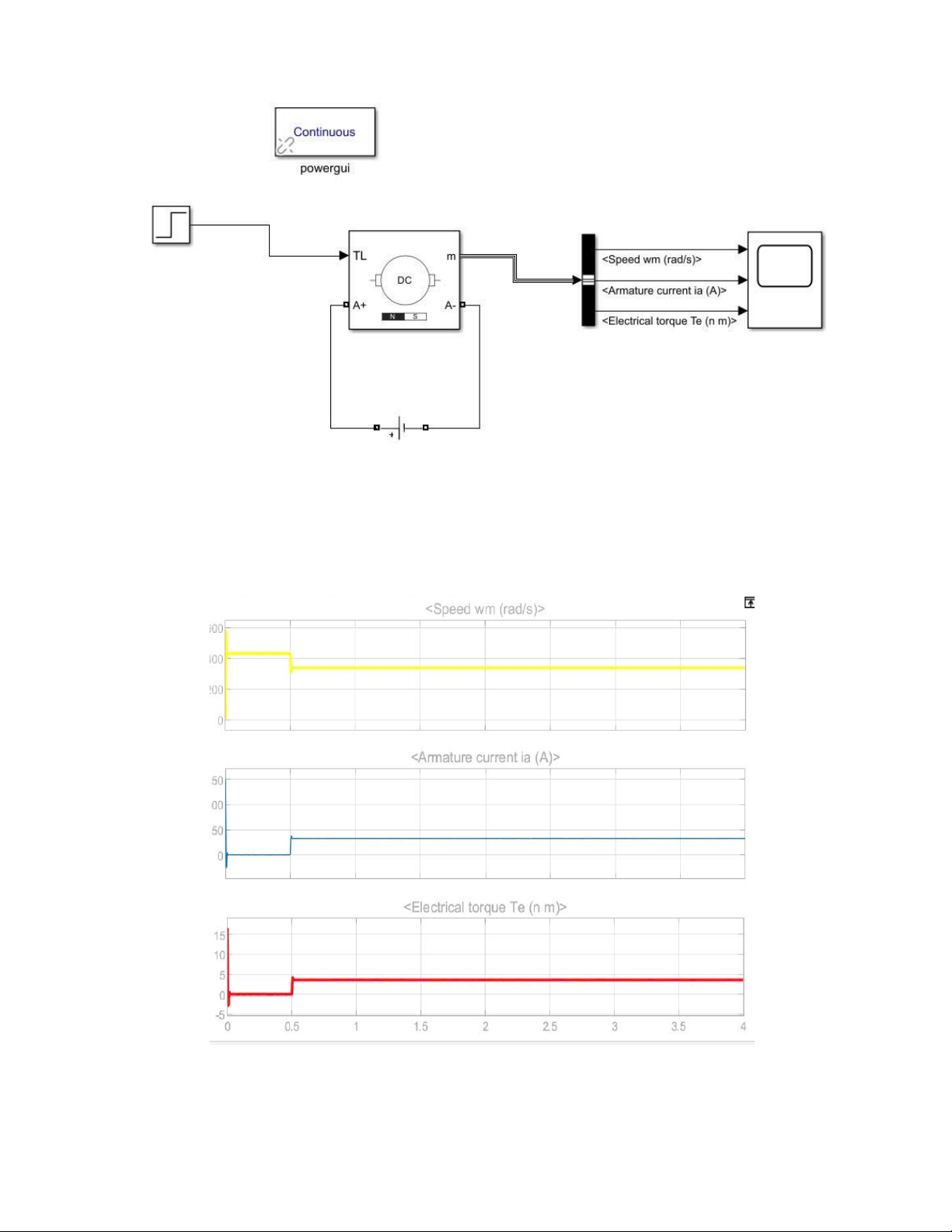
- Sơ đồ mô phỏng động cơ DC: lOMoAR cPSD| 22014077
PBL 2: HỆ THỐNG ĐIỀU KHIỂN VÀ TRUYỀN ĐỘNG ĐIỆN GVHD: TS. NGUYỄN KHÁNH QUANG
Hình 2.9 Sơ đồ mô phỏng hoạt động của động cơ.
- Đồ thị hoạt động của động cơ:
Hình 2.10 Đồ thị hoạt động của động cơ
Tài liệu liên quan:
-

Giáo trình Quang học Đại học Thái Nguyên
10 5 -

Hệ thống tự động kiểm tra và phân loại phôi dùng PLC môn Cơ điện tử | Trường Đại Học Thái Nguyên
97 49 -

Chọn và Kiểm Tra Thiết Bị Điện môn Cơ điện tử | Trường Đại Học Thái Nguyên
99 50 -

Giải bài tập Cơ học - Vật lý (Chương 1: Phương trình chuyển động) môn Cơ điện tử | Trường Đại Học Thái Nguyên
104 52