Tiểu luận Công nghệ cảm biến đề tài "Đo mực nước bằng cảm biến, đo khoảng cách HC-SR04 hiển thị lên LCD dùng Arduino Uno"
Tiểu luận Công nghệ cảm biến đề tài "Đo mực nước bằng cảm biến, đo khoảng cách HC-SR04 hiển thị lên LCD dùng Arduino Uno" của Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh với những kiến thức và thông tin bổ ích giúp sinh viên tham khảo, ôn luyện và phục vụ nhu cầu học tập của mình cụ thể là có định hướng ôn tập, nắm vững kiến thức môn học và làm bài tốt trong những bài kiểm tra, bài tiểu luận, bài tập kết thúc học phần, từ đó học tập tốt và có kết quả cao cũng như có thể vận dụng tốt những kiến thức mình đã học vào thực tiễn cuộc sống. Mời bạn đọc đón xem!
Môn: Công nghệ cảm biến 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:


















Preview text:
lOMoARcPSD| 36625228
BỘ GIÁO DỤC & ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP. HỒ CHÍ MINH
KHOA ĐIỆN – ĐIỆN TỬ
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH
--------------------------------- ĐỀ TÀI MÔN HỌC
NGÀNH CÔNG NGHỆ KỸ THUẬT ĐIỆN TỬ VIỄN THÔNG
CHUYÊN NGÀNH ĐIỆN TỬ CÔNG NGHIỆP ĐỀ TÀI:
ĐO MỰC NƯỚC BẰNG CẢM BIẾN
ĐO KHOẢNG CÁCH HC-SR04
HIỂN THỊ LÊN LCD DÙNG ARDUINO UNO
Môn học: Công nghệ cảm biến MỤC LỤC
LIỆT KÊ HÌNH VẼ.............................................................................................................................5
LỜI CAM ĐOAN.................................................................................................................................6
LỜI CẢM ƠN......................................................................................................................................7
Chương 1. TỔNG QUAN....................................................................................................................8
1.1 ĐẶT VẤN ĐỀ...........................................................................................................................8
1.2 MỤC TIÊU..................................................................................................................................8
1.3 NỘI DUNG NGHIÊN CỨU.......................................................................................................8
1.4 GIỚI HẠN...................................................................................................................................9 lOMoARcPSD| 36625228
1.5. BỐ CỤC.....................................................................................................................................9
Chương 2. CƠ SỞ LÝ THUYẾT......................................................................................................10
2.1 Giới thiệu phần cứng................................................................................................................10 2.1.1
Arduino Uno...................................................................................................................10
2.1.2 Module sim800C.................................................................................................................13
2.1.3 Khoá từ...............................................................................................................................16
2.1.4 Adapter 12V-2A..................................................................................................................17
2.1.5 LCD 16x2............................................................................................................................18
2.1.6 Module I2C Arduino..........................................................................................................19
2.1.7 Keypad 4x4.........................................................................................................................20
2.1.8 Cảm biến vật cản hồng ngoại............................................................................................21
Chương 3. THIẾT KẾ.......................................................................................................................22
3.1 GIỚI THIỆU.............................................................................................................................22
3.2 THIẾT KẾ HỆ THỐNG..........................................................................................................22
3.2.1 Thiết kế sơ đồ khối hệ thống..............................................................................................22
3.2.2 Sơ đồ nguyên lý của toàn mạch.........................................................................................23
Chương 4. THI CÔNG HỆ THỐNG................................................................................................24
4.1 THI CÔNG HỆ THỐNG.........................................................................................................24
Chương 5. KẾT QUẢ_NHẬN XÉT_ĐÁNH GIÁ..........................................................................29
Chương 6. KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN......................................................................30 6.1
KẾT LUẬN...........................................................................................................................30
6.2 HƯỚNG PHÁT TRIỂN.......................................................................................................30
TÀI LIỆU THAM KHẢO.................................................................................................................31 LIỆT KÊ HÌNH VẼ Hình Trang
Hình 2.1: Arduino Uno................................................................................................10
Hình 2.2: Sơ đồ chân Arduino Uno..............................................................................11
Hình 2.3: Module Sim800C.........................................................................................13
Hình 2.4: Sơ đồ chân Module Sim800C......................................................................14
Hình 2.5: Khoá chốt điện từ.........................................................................................16
Hình 2.6: Adapter 12V-2A...........................................................................................17
Hình 2.7: LCD 16x2 xanh dương................................................................................18 lOMoARcPSD| 36625228
Hình 2.8: Module I2C Arduino....................................................................................19
Hình 2.9: Cấu tạo và sơ đồ chân keypad 4x4...............................................................20
Hình 2.10: Cảm biến vật cản hồng ngoại.....................................................................20
Hình 2.11: Hai mắt TX và RX.....................................................................................21 LỜI CẢM ƠN
Trong thời gian thực hiện để tài này, em đã nhận được nhiều sự giúp đỡ, đóng góp ý kiến và chỉ bảo
nhiệt tình của các thầy cô và bạn bè, vậy nên em xin chân thành cảm ơn:
- Ban giám hiệu nhà trường Đại học Sư Phạm Kỹ Thuật TP.HCM đã tạo điều kiện tốt nhất cho
sinhviên học tập và nghiên cứu.
- Thầy cô trong trường đã tận tình hưởng dẫn và thư viện trường đã cung cấp giáo trình và tài
liệutham khảo trong suốt quá trình học tập của sinh viên.
- Đặc biệt là sự hướng dẫn và giúp đỡ tận tình của thầy Nguyễn Trường Duy đã giảng dạy, giúp
đỡnhững vẫn đề nhóm còn thắc mắc.
Về chủ quan cả nhóm đều đã cố gắng trong quá trình tìm hiều và thực hiện để tài nhưng vì kiến thức
còn hạn chế khiến đề tài này còn chưa hoàn thiện cách tốt nhất, rất mong được sự góp ý, nhận xét đánh
giá về nội dung và hình thức trình bày từ thầy để có thể hoàn thiện bài báo cáo tốt hơn. Xin chân thành cảm ơn! lOMoARcPSD| 36625228
Chương 1. TỔNG QUAN 1.1 ĐẶT VẤN ĐỀ
Hiện nay, thế giới đang ngày càng phát triển về mọi lĩnh vực đồng thời giúp cuộc sống của con người
phát triển song song theo đó. Nhất là về lĩnh vực công nghê, khi con người đầu tư chất cám cũng như
hiểu biết để phát triển và tìm tòi những cái mới về công nghệ. Trong lĩnh vực công nghệ không thể
không kể đến công nghệ cảm biến. Vì thế, nhóm chọn đề tài “Đo mực nước bằng cảm biến đo khoảng
cách HC-SR04 hiển thị lên LCD dùng Ảdduino Uno”. Đề tài là một dự án ứng dụng công nghệ điện tử
để giải quyết vấn đề đo mực nước trong các bể chứa, hồ bơi, đồng ruộng hay các thiết bị liên quan đến
nước khác. Cảm biến đo khoảng cách HC-SR04 là một trong những loại cảm biến phổ biến và được sử
dụng rộng rãi trong các ứng dụng đo khoảng cách trong công nghệ điện tử. Sử dụng cảm biến này để
đo mực nước có thể giúp người dùng dễ dàng và chính xác hơn trong việc kiểm tra mực nước. Bằng
cách kết hợp cảm biến khoảng cách HC-SR04 và vi điều khiển Arduino Uno, người dùng có thể thiết
kế một hệ thống đo mực nước đơn giản và hiệu quả. Dữ liệu đo được sẽ được hiển thị lên màn hình
LCD, giúp người dùng dễ dàng theo dõi và đánh giá mực nước trong bể chứa hay hồ bơi. Đề tài này
không chỉ giúp người dùng tiết kiệm thời gian và công sức trong việc đo mực nước, mà còn có thể giúp
họ phát hiện sớm các vấn đề về mực nước, giúp cho việc quản lý và sử dụng nước trở nên hiệu quả hơn. 1.2 MỤC TIÊU
• Sử dụng cảm biến khoảng cách HC-SR04 và vi điều khiển Arduino Uno để đo mực nước trong
các bể chứa, hồ bơi hoặc các thiết bị liên quan đến nước khác.
• Thiết kế và lập trình hệ thống hiển thị mực nước trên màn hình LCD để người dùng dễ dàng
theo dõi thông tin về mực nước.
• Tối ưu hệ thống để đảm bảo tính ổn định và độ chính xác của dữ liệu đo được.
• Tăng cường tính linh hoạt của hệ thống, cho phép người dùng dễ dàng cài đặt và điều chỉnh các
tham số để phù hợp với nhu cầu sử dụng của mỗi thiết bị.
• Nâng cao hiệu quả sử dụng nước và giảm thiểu lãng phí nước bằng cách giúp người dùng có thể
quản lý và kiểm soát mực nước trong các thiết bị liên quan đến nước.
1.3 NỘI DUNG NGHIÊN CỨU
• NỘI DUNG 1: Tìm hiểu về các linh kiện: Arduino Uno, cảm biến HC-SR04, LCD.
• NỘI DUNG 2: Xây dựng kiến trúc hệ thống hiển thị mực nước trên màn hình LCD để người dùng
dễ dàng theo dõi thông tin về mực nước, tình trạng mức nước trong bồn. NỘI DUNG 3: Thiết sơ
đồ khối, sơ đồ nối dây.
• NỘI DUNG 4: Thi công và chạy mạch.
• NỘI DUNG 5: Đánh giá kết quả thực hiện 1.4 GIỚI HẠN
• Khoảng cách đo: Cảm biến khoảng cách HC-SR04 có thể đo khoảng cách lên đến 4 mét. Vì
vậy, giới hạn của đề tài là đo mực nước trong các bể chứa, hồ bơi hoặc các thiết bị liên quan
đến nước có kích thước tương đối nhỏ và không quá sâu. lOMoARcPSD| 36625228
• Độ chính xác của dữ liệu đo được: Độ chính xác của dữ liệu đo được phụ thuộc vào nhiều yếu
tố, bao gồm chất lượng của cảm biến, độ phân giải của màn hình LCD và độ ổn định của hệ
thống. Do đó, giới hạn của đề tài là đảm bảo độ chính xác đo được đủ để người dùng có thể
quản lý và sử dụng nước một cách hiệu quả.
• Tính ứng dụng của hệ thống: Hệ thống đo mực nước được xây dựng trong đề tài này chỉ phục
vụ cho mục đích đo mực nước trong các bể chứa, hồ bơi hoặc các thiết bị liên quan đến nước
khác. Không được áp dụng cho các mục đích khác.
• Khả năng mở rộng: Hệ thống đo mực nước được thiết kế trong đề tài này có thể được mở rộng
và phát triển để đáp ứng các nhu cầu sử dụng khác. Tuy nhiên, giới hạn của đề tài là chỉ nghiên
cứu và triển khai hệ thống cơ bản để đo mực nước trong các bể chứa, hồ bơi hoặc các thiết bị
liên quan đến nước khác. 1.5. BỐ CỤC
• Chương 1: Tổng Quan
• Chương 2: Cơ Sở Lý Thuyết.
• Chương 3: Thiết Kế và Tính Toán
• Chương 4: Thi công mạch
• Chương 5: Kết Quả, Nhận Xét và Đánh Giá
• Chương 6: Kết Luận và Hướng Phát Triển lOMoARcPSD| 36625228
Chương 2. CƠ SỞ LÝ THUYẾT
2.1 Giới thiệu phần cứng 2.1.1 Arduino Uno Giới thiệu
Arduino UNO R3 là một loại bo mạch vi điều khiển, được sử dụng phổ biến trong họ Arduino.
Chúng được phát hành vào năm 2011, và là phiên bản thứ 3 mới nhất của bảng Arduino. Ưu điềm của
Arduino là ngôn ngữ cực kì dễ học (giống C/C++), cấp ngoại vi trên bo mạch đều đã được chuẩn hóa,
nên không cần biết nhiều về điện tử chúng ta cũng có thể lập trình được. Mạch kit này được phát triển
dựa trên ATmega328P với mục đích kiểm soát và giữ bộ vi điều khiển. Những model hiện tại được
trang bị gồm 1 công giao tiếp USB, 6 chân đầu vào analog, 14 chân I/O kỹ thuật số tương thích với
nhiều board mở rộng khác nhau. Hình 2.1 Arduino Uno
Nguyên lý hoạt động
Arduino Uno R3 được sử dụng bằng cách gắn vào máy tính thông qua một cáp USB. Sau khi đã lắp
đặt xong, chúng ta sẽ sử dụng pin hoặc bộ chuyển đổi AC-DC để cung cấp điện cho mạch kit. Khi đấu
nối thành công, mạch sẽ kích hoạt và bắt đầu.
Vai trò của mạch kit Arduino UNO R3
UNO được thiết kế để hỗ trợ sự phát triển của phần mềm Arduino IDE 1.0. Lý do mạch kit này có
tên Arduino UNO R3 là vì chúng là phiên bản sửa đổi mới nhất, thứ 3 của Arduino Uno. Có một số thay đổi:
Chip điều khiển USB được thay đổi từ ATmega8U2 (flash 8K) thành ATmega16U2 (flash 16K).
Điều này không làm tăng flash hoặc RAM có sẵn cho các bản phác thảo.
Trang bị thêm ba chân mới. Trong đó, các chân I2C (A4, A5) được đưa ra bên cạnh bảng gần
AREF. Một chân IOREF bên cạnh chân đặt lại, là một bản sao của chân 5V. lOMoARcPSD| 36625228
Nút đặt lại hiện nằm bên cạnh đầu nối USB, giúp dễ tiếp cận hơn khi sử dụng tấm chắn.
Ngoài ra, mạch kit này cũng đóng vai trò quan trọng và chính trong bảng bảng USB-Arduino Đặc điểm
Một trong những ưu điểm nổi bật của mạch kit arduino uno r3 là người sử dụng có thể thay đổi bộ vi
điều khiển trên bảng trong trường hợp họ gặp phải sự cố hay mắc lỗi.
Ngoài ra, bộ kit này còn mang đến cho người sử dụng nhiều tính năng tuyệt vời như: • Khả năng tháo rời.
• Tích hợp sẵn trong DIP (gói nội tuyến kép).
• Khả năng điều khiển ATmega328.
• Dễ dàng tải lập trình.
Ưu điểm cuối cùng nhưng không kém phần quan trọng là: Arduino có một cộng đồng hỗ trợ lớn và
một bộ thư viện hỗ trợ phong phú. Cùng với “lá chắn” phần cứng bổ sung phía sau. Điều này sẽ là một
sự lựa chọn tuyệt vời cho những người mới bắt đầu làm việc trong lĩnh vực thiết bị điện tử nhúng. lOMoARcPSD| 36625228 Sơ đồ chân
Hình 2.2 Sơ đồ chân Arduino Uno
Chức năng các chân của arduino uno Tên chân Chức năng 5 V, 3.3V
Dùng để cấp nguồn đầu ra cho các thiết bị chứ
không phải chân cấp nguồn vào V in ( Voltage Input ):
Dùng để cấp nguồn ngoài cho Arduino Uno,
nối dương cực vào chân nà và cực âm vào chân GND GND (Ground):
Cực âm của nguồn điện cấp cho Arduino Uno.
Khi sử dụng các thiết bị sử dụng những nguồn
điện riêng biệt thì phải nối các chân này. IOREF :
Điện áp hoạt động của Arduino, có mức điện
áp là 5V. Không được sử dụng để lấy nguồn từ chân này. RESET :
Việc nhấn nút RESET trên mạch arduino
tương tự như khi nối chân RESET với GND qua điện trở 10 KΩ. 14 chân digital
Dùng để đọc ghi dữ liệu. Chúng chỉ hoạt động
ở 2 mức điện áp 0V và 5V với các dòng vào/ra
tối đa trên mỗi chân là 40 mA.
2 chân Serial : 0( RX) và 1(TX )
Dùng để gửi (transmit - TX) và nhận (Receive lOMoARcPSD| 36625228
- RX) dữ liệu TTL Serial. Arduino Uno có thể
giao tiếp với các thiết bị khác thông qua 2 chân
này, như gắn thêm màn hình LCD để hiển thị.
Chân PWM: 3, 5,6,9, 10 và 11 Cho phép xuất xung PWM với độ phân giải 8 bit( giá trị từ 0 -> 28-1 tương
ứng với 0 - 5V. Chân giao tiếp SPI: 10(SS), 11(MOSI), 12(MISO), 4 chân này có thể truyền phát dữ liệu bằng 13(SCK)
giao thức SPI tới các thiết bị khác.
LED 13 Trên arduino có 1 đèn led, khi bấm nút reset thì đèn led này sẽ nhấp nháy để báo hiệu. Nó được
nối với chân số 13. Khi chân này được sử dụng, đèn led sẽ sáng. 6 chân analog(A0 -> A5)
Cung cấp độ phân giải 10 bit(0 → 210-1) để
đọc giá trị điện áp trong khoảng 0 -> 5V. 2 chân A4(SDA) và A5(SCL) 2 chân A4(SDA) và A5(SCL)
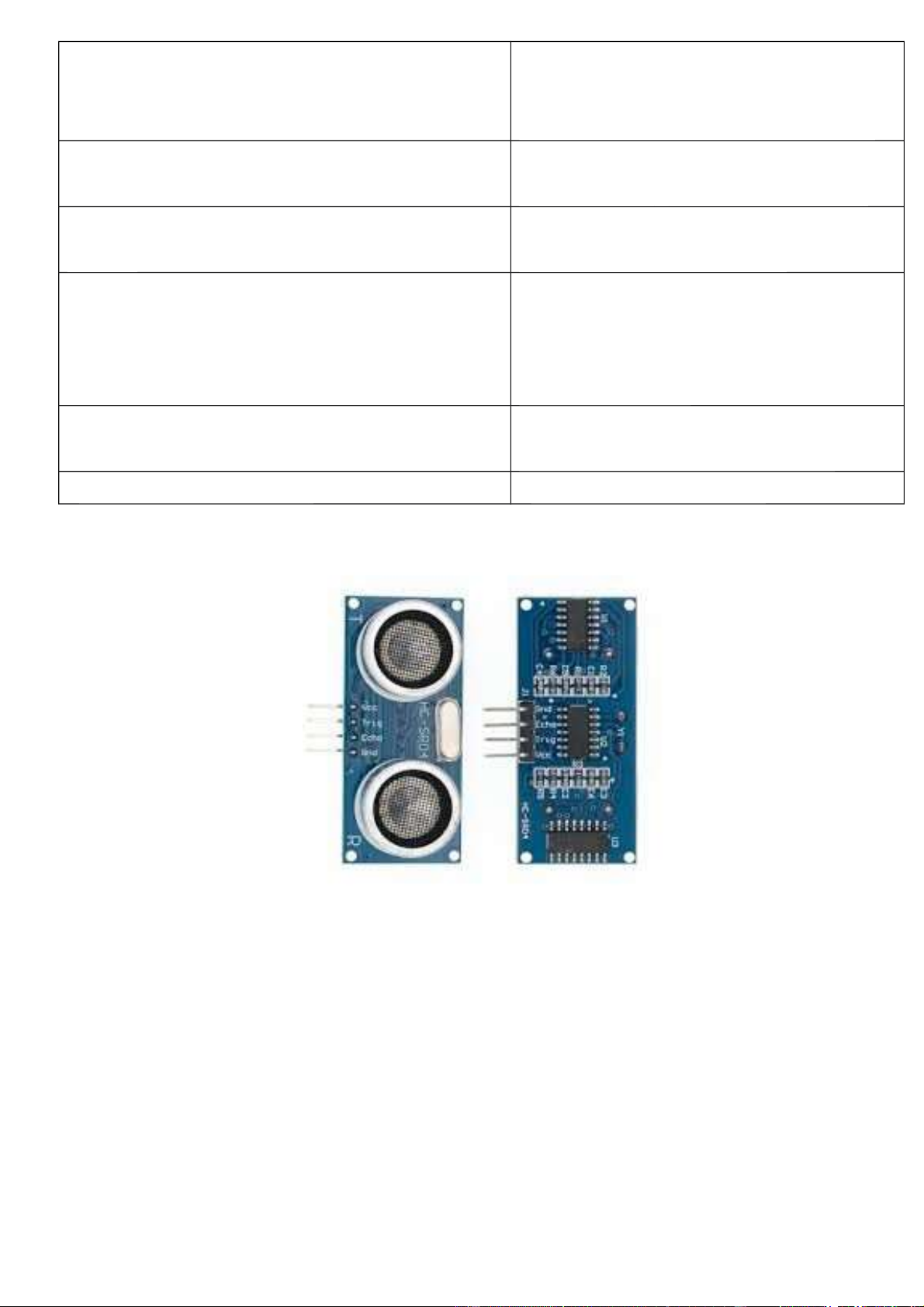
2.1.2 Cảm biến HC-SR04 Hình 2.2 HC SR04
- HC-SR04 là cảm biến siêu âm chủ yếu được sử dụng để xác định khoảng cách của đối tượng mụctiêu.
- Nó đo khoảng cách chính xác bằng công nghệ không tiếp xúc, tức là không có tiếp xúc vật lý
giữacảm biến và vật thể.
- Bộ phát và bộ thu là hai bộ phận chính của cảm biến, bộ phát chuyển đổi tín hiệu điện thành
sóngsiêu âm, còn bộ thu chuyển đổi tín hiệu siêu âm đó trở lại thành tín hiệu điện.
- Các sóng siêu âm này là các tín hiệu âm thanh có thể được đo và hiển thị ở đầu nhận. lOMoARcPSD| 36625228
- Nó cung cấp các chi tiết đo lường chính xác và đi kèm với độ phân giải khoảng 3mm, có thể có
sựkhác biệt nhỏ về khoảng cách tính toán từ đối tượng và khoảng cách thực tế.
Thông số kỹ thuật cảm biến HC-SR04
Điện áp hoạt động: + 5V
Khoảng cách đo lý thuyết: 2cm đến 450cm
Khoảng cách đo thực tế: 2cm đến 80cm Độ chính xác: 3mm
Góc đo được bao phủ: <15 °
Dòng điện hoạt động: <15mA
Tần số hoạt động: 40Hz
Cảm biến đo khoảng cách tương đương
Cặp thu phát sóng siêu âm, module cảm biến hồng ngoại, cặp cảm biến hồng ngoại, cảm biến khoảng cách analog IR
Hoạt động của cảm biến siêu âm HC-SR04
Như hình trên, cảm biến HC-SR04 là module 4 chân, có tên chân tương ứng là Vcc, Trigger, Echo và
Ground. Cảm biến này là một cảm biến rất phổ biến được sử dụng trong nhiều ứng dụng cần đo khoảng
cách hoặc cảm biến đối tượng. Module có hai mắt ở phía trước tạo thành bộ phát siêu âm và bộ thu.
Cảm biến hoạt động với công thức đơn giản
Khoảng cách = Tốc độ × Thời gian
Bộ phát sóng siêu âm truyền một sóng siêu âm, sóng này truyền trong không khí và khi nó bị bất kỳ
vật liệu nào cản trở nó sẽ bị phản xạ trở lại cảm biến, sóng phản xạ này được quan sát bởi module bộ
thu siêu âm như hình bên dưới.
Bây giờ, để tính khoảng cách bằng cách sử dụng các công thức trên cần biết tốc độ và thời gian. Vì
chúng ta đang sử dụng sóng siêu âm nên tốc độ phổ quát của sóng siêu âm ở điều kiện phòng là 330m
/ s. Mạch điện tích hợp sẵn trên module sẽ tính toán thời gian cần thiết để sóng siêu âm quay trở lại và
bật chân echo ở mức cao trong cùng một khoảng thời gian cụ thể, bằng cách này chúng ta cũng có thể
biết được thời gian đã thực hiện. Bây giờ chỉ cần tính toán khoảng cách bằng vi điều khiển hoặc bộ vi xử lý. lOMoARcPSD| 36625228
Cách sử dụng cảm biến siêu âm HC-SR04
Cảm biến khoảng cách HC-SR04 thường được sử dụng với cả nền tảng vi điều khiển và vi xử lý như
Arduino, ARM, PIC, Raspberry Pi, ... Hướng dẫn sau sẽ dùng chung cho bất kể loại thiết bị tính toán nào được sử dụng.
Cấp nguồn cho cảm biến bằng cách sử dụng nguồn + 5V được điều chỉnh thông qua các chân nối đất
và Vcc của cảm biến. Dòng điện được tiêu thụ bởi cảm biến nhỏ hơn 15mA và do đó có thể được cấp
nguồn trực tiếp bằng các chân 5V trên bo mạch (nếu có). Các chân Trigger và Echo đều là các chân I /
O và do đó có thể được kết nối với các chân I / O của vi điều khiển. Để bắt đầu đo, chân trigger phải
được đặt ở mức cao 10uS và sau đó tắt. Hoạt động này sẽ kích hoạt một sóng siêu âm ở tần số 40Hz từ
bộ phát và bộ thu sẽ đợi sóng quay trở lại. Khi sóng được trả lại sau khi nó bị phản xạ bởi bất kỳ đối
tượng nào, chân Echo sẽ tăng cao trong một khoảng thời gian cụ thể bằng với thời gian cần thiết để
sóng quay trở lại cảm biến.
Khoảng thời gian mà chân Echo vẫn ở mức cao được đo bởi vi xử lý hoặc vi điều khiển vì nó cung
cấp thông tin về thời gian cần thiết để sóng quay trở lại cảm biến. Sử dụng thông tin này để tính khoảng cách được đo. 2.1.3 LCD 16x2 Giới thiệu
LCD 16x2 (16 ký tự trên 2 hàng) là một loại màn hình hiển thị ký tự thông dụng được sử dụng trong
nhiều ứng dụng điện tử. Màn hình này có kích thước 16 cột x 2 hàng và mỗi ô có thể hiển thị một ký
tự. Nó được kết nối với vi điều khiển hoặc các thiết bị khác để hiển thị thông tin tương ứng.
Hình 2.3 LCD 16x2 xanh dương lOMoARcPSD| 36625228
Thông số kỹ thuật
• LCD 16x2 có 16 chân trong đó 8 chân dữ liệu (D0 - D7) và 3 chân điều khiển (RS, RW, EN).
• 5 chân còn lại dùng để cấp nguồn và đèn nền cho LCD 16x2.
• Các chân điều khiển giúp ta dễ dàng cấu hình LCD ở chế độ lệnh hoặc chế độ dữ liệu.
• Chúng còn giúp ta cấu hình ở chế độ đọc hoặc ghi.
LCD 16x2 có thể sử dụng ở chế độ 4 bit hoặc 8 bit tùy theo ứng dụng ta đang làm.
2.1.4 Module I2C Arduino Giới thiệu
LCD có quá nhiều nhiều chân gây khó khăn trong quá trình đấu nối và chiếm dụng nhiều chân trên vi điều khiển.
Module I2C LCD ra đời và giải quyết vấn để này cho bạn.
Thay vì phải mất 6 chân vi điều khiển để kết nối với LCD 16x2 (RS, EN, D7, D6, D5 và D4) thì
module IC2 bạn chỉ cần tốn 2 chân (SCL, SDA) để kết nối.
Module I2C hỗ trợ các loại LCD sử dụng driver HD44780(LCD 16x2, LCD 20x4, ...) và tương thích
với hầu hết các vi điều khiển hiện nay. Hình 2.4 Module I2C Arduino
Thông số kỹ thuật
• Điện áp hoạt động: 2.5-6V DC. lOMoARcPSD| 36625228
• Hỗ trợ màn hình: LCD1602,1604,2004 (driver HD44780). • Giao tiếp: I2C.
• Địa chỉ mặc định: 0X27 (có thể điều chỉnh bằng ngắn mạch chân A0/A1/A2).
• Tích hợp Jump chốt để cung cấp đèn cho LCD hoặc ngắt.
• Tích hợp biến trở xoay điều chỉnh độ tương phản cho LCD.
Giao tiếp I2C với LCD Module I2C Arduino Arduino uno VCC 5 V GND GND SDA A4/SDA SCL A5/SCL
2.1.5 Led thanh nhôm RGB Giới thiệu
Là một loại đèn led sở hữu màu ánh sáng đa sắc với khả năng đổi màu linh hoạt. lOMoARcPSD| 36625228
Hình 2.5 Dây LED thanh nhôm RGB
Cấu tạo của dây led RGB
Cấu tạo của Led RGB khác với các dòng Led thường khác, RGB có cấu tạo gồm có 4 chân,
trong đó bao gồm 1 chân dương chung và 3 chân âm cho từng màu riêng.
Dây led RGB là sự kết hợp của ba màu led; màu sắc sẽ thay đổi dựa vào việc điều khiển các
chân của Led; xung PWM là cách dùng phổ biến để điều khiển.
Cấu tạo bao gồm 02 cực: Cực dương chung (Anode) và Cực âm riêng (Cathode) được ngăn
cách nhau bởi một tinh thể vật liệu bán dẫn.
Chương 3. THIẾT KẾ 3.1 GIỚI THIỆU
Yêu cầu của đề tài gồm: Hệ thống hoạt động, khi đi ngang qua cảm biến đặt trước cửa thì cảm biến
sẽ nhận biết là có người, lúc này Module sim sẽ gửi một mã OTP đến điện thoại của chủ nhà, bắt buộc
phải nhập mã OTP vào Keypad. Mã đúng, Relay sẽ kích lên mức cao và chốt cửa điện từ sẽ được mở.
Mã sai sẽ có thông báo hiển thị trên LCD và bắt phải làm lại từ đầu. Mã OTP sẽ là mã ngẫu nhiên từ
2000-9999 cho nên sau mỗi lần cửa mở thì mã sẽ khác nhau lOMoARcPSD| 36625228
3.2 THIẾT KẾ HỆ THỐNG
3.2.1 Thiết kế sơ đồ khối hệ thống
Để hệ thống hoạt động ổn định thì nguồn cấp là 12V-2A cho toàn bộ hệ thống, Module sim
hoạt động với điện áp 5V-2A, ngoài ra các thiết bị khác cũng có điện áp hoạt động tương tự
Module sim. Chốt khóa điện từ hoạt động ở mức điện áp 12V. lOMoARcPSD| 36625228
3.2.2 Sơ đồ nguyên lý của toàn mạch
Chương 4. THI CÔNG HỆ THỐNG
4.1 THI CÔNG HỆ THỐNG
Lắp ráp và kiểm tra
Lập danh sách các bước lắp ráp: lOMoARcPSD| 36625228
a. Lắp ráp module nguồn
b. Lắp ráp Module Sim lOMoARcPSD| 36625228
-Dây xanh là dây cấp nguồn cho Module sim 5V
-Dây trắng là dây nối đất
-Dây vàng nối chân TX của Module sim với chân 2 Arduino
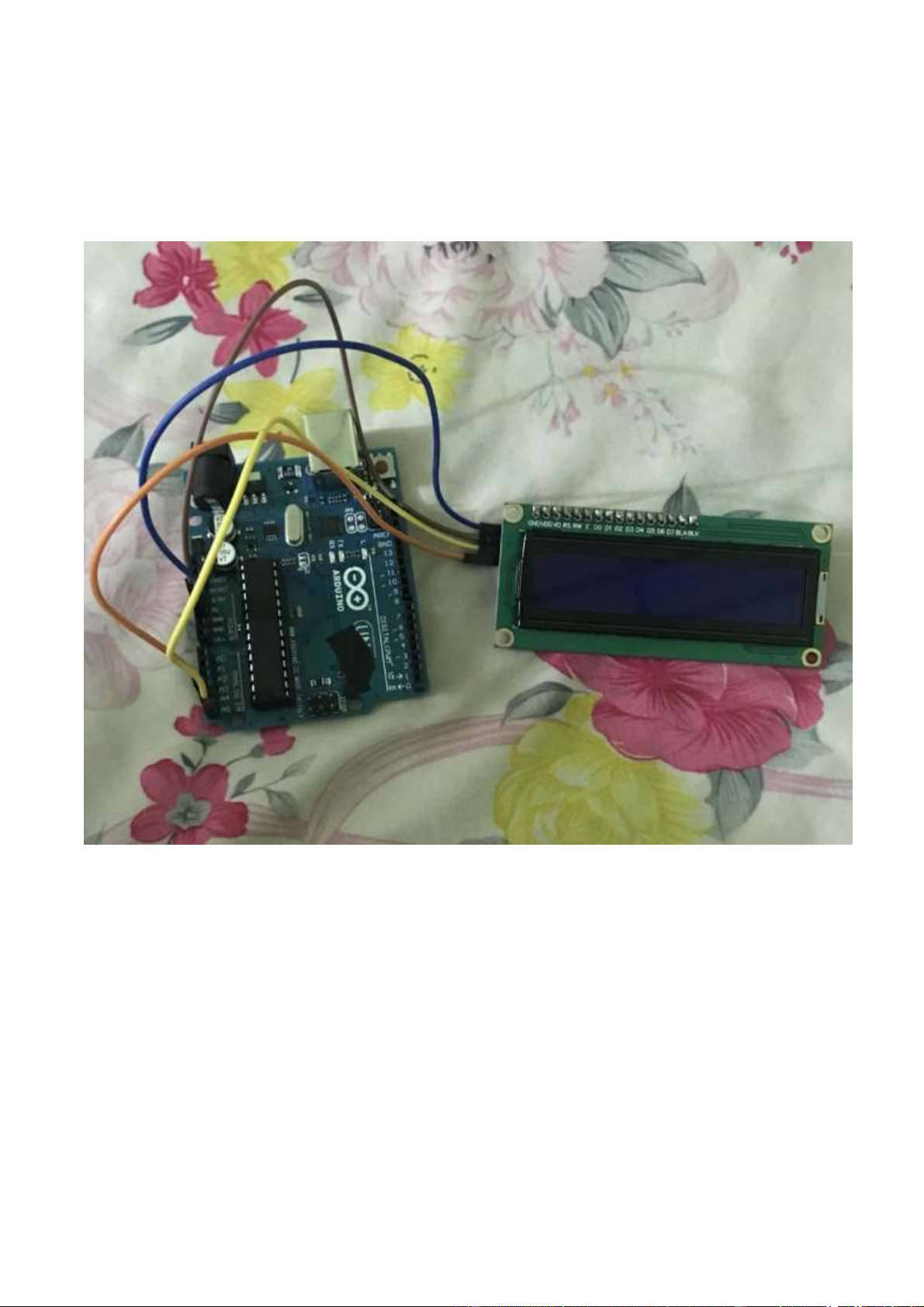
-Dây nâu nối chân RX của Module sim với chân 3 Arduino c. Láp ráp LCD
- Dây xanh dương cấp nguồn 5V cho LCD
- Dây nâu là dây nối đất
- Dây vàng nối chân SDA của LCD với chân A0 Arduino
- Dây cam nối chân SCL của LCD với chân A1 Arduino lOMoARcPSD| 36625228
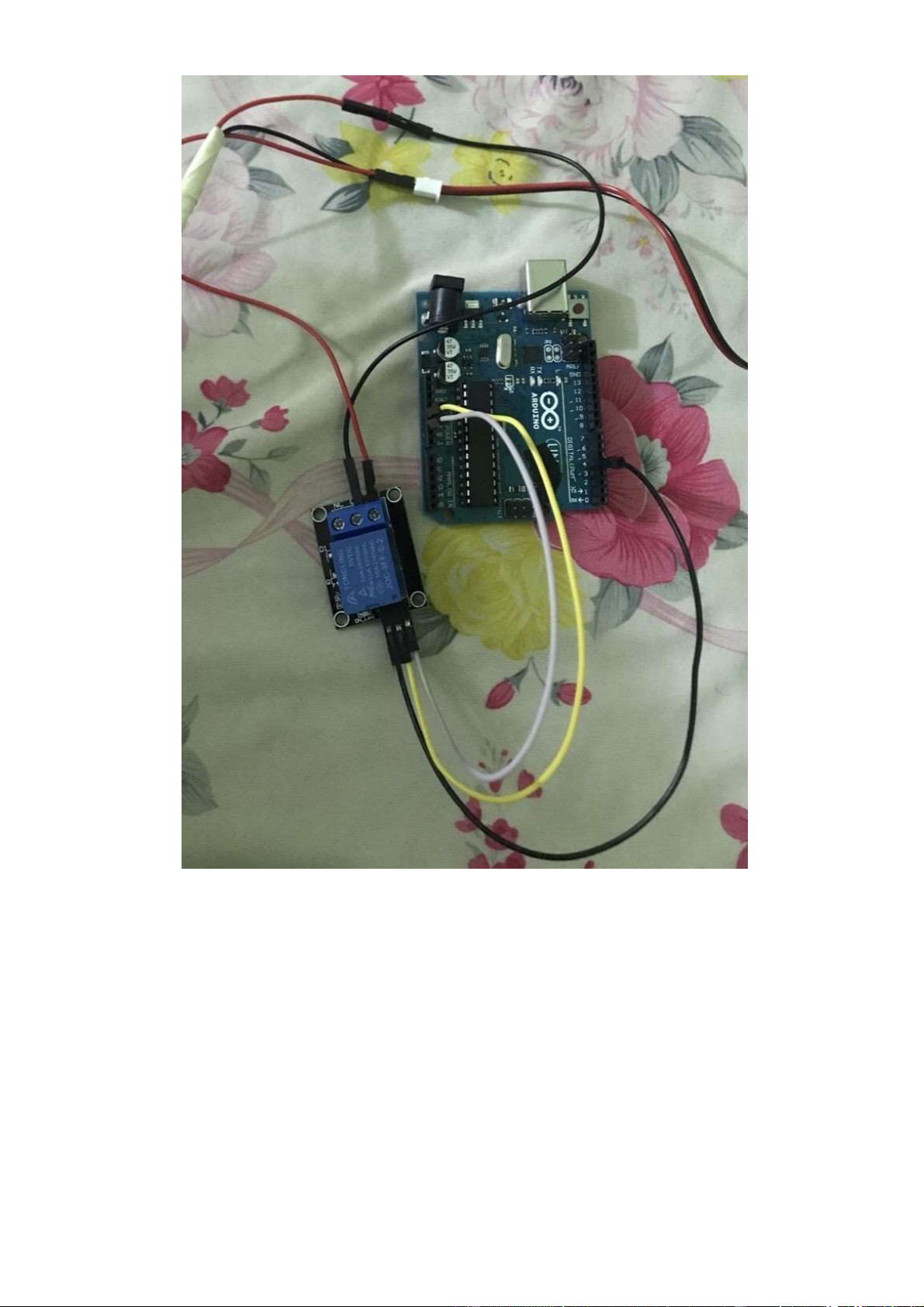
d. Lắp ráp khóa điện từ và Relay
- Chân âm của Adapter nối với chân âm của khóa điện từ
- Chân dương của Adapter nối với GND của Relay
- Chân dương của khóa điện từ nối với NO (tiếp điểm thường mở) của Relay
- Dây trắng nối GND của Relay với Arduino
- Dây vàng nối 5V của Relay với Arduino
- Dây đen nối chân tín hiệu của Relay với chân 4 Arduino lOMoARcPSD| 36625228
e. Nối keypad với Arduino
Theo thứ tự từ trên xuống thì chân 1 của Keypad sẽ nối chân 13 Arduino
Nối cho đến hết 8 chân của Keypad
(1,2,3,4,5,6,7,8) Keypad nối với (13,12,11,10,9,8,7,6) của Arduino
Chương 5. KẾT QUẢ_NHẬN XÉT_ĐÁNH GIÁ
Quá trình nhóm nghiên cứu đề tài và hoàn thành trong 5 tuần kể từ khi đăng ký đề tài. Trong quá trình
nghiên cứu nhóm đã nghiên cứu và biết cách nối cảm biến HC-SR04, lcd với vi điều khiển Arduino
Uno. Đồng thời hiểu rõ hơn về cách hoạt động của các linh kiện và ứng dụng trong đề tài. Đặc biệt
nhóm đã hiểu hơn về hoạt động của cảm biến HC-SR04 trong việc đo khoảng cách có thể đo mức nước
trong bồn bằng nhiều phương thức qua kết nối với Arduino Uno. Nhóm đã biết thiết kế mạch sản phẩm,
biết sử dụng phần mềm để vẽ mạch.
Đề tài này đã nghiên cứu và triển khai thành công một hệ thống đo mực nước sử dụng cảm biến khoảng
cách HC-SR04 và hiển thị trên màn hình LCD dùng Arduino Uno. Đề tài cũng đã giải thích rõ ràng về
nguyên lý hoạt động của hệ thống và các bước thực hiện. Tuy nhiên, đề tài có thể được cải tiến hơn nữa
bằng cách sử dụng các loại cảm biến khác nhau để đo mực nước trong các bể chứa, hồ bơi hoặc các
thiết bị liên quan đến nước khác.
Đề tài "Đo mực nước bằng cảm biến đo khoảng cách HC-SR04 hiển thị lên LCD dùng Arduino Uno"
là một đề tài có tính ứng dụng cao trong đời sống thực tế. Hệ thống đo mực nước sử dụng cảm biến
khoảng cách HC-SR04 là phù hợp để đo mực nước trong các bể chứa, hồ bơi hoặc các thiết bị liên quan
đến nước có kích thước tương đối nhỏ và không quá sâu. Đề tài cũng giải thích rõ ràng về nguyên lý lOMoARcPSD| 36625228
hoạt động và các bước thực hiện để người đọc có thể dễ dàng triển khai hệ thống này. Tuy nhiên, để cải
tiến hơn nữa, đề tài có thể sử dụng các loại cảm biến khác nhau để đo mực nước
Nhóm đã tập trung và hoàn thành mô hình nhưng vẫn còn một só bất cập. Có thể gọi là khá ổn khi
mạch có thể chạy theo yêu cầu mà nhóm đề ra. Về hạn chế, cảm biến HC-SR04 đôi khi còn đo khoảng
cách chưa chính xác. Nếu chỉ mục tiêu của đề tài là tạo ra một hệ thống đơn giản để đo mức nước trong
bồn chứa nối với Arduino Uno và các linh kiện điện tử liên quan, kết quả sẽ là một hệ thống có thể hoạt
động tốt và đáp ứng được yêu cầu cơ bản. Nếu mục tiêu của đề tài là phát triển thêm các tính năng và
cải tiến hệ thống để nó trở nên thông minh, an toàn và dễ sử dụng hơn, kết quả sẽ phụ thuộc vào sự
phát triển của các tính năng và cải tiến đó. Vậy đánh giá chung theo chủ quan của nhóm thì mạch đã hoàn thiện.
Chương 6. KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN 6.1 KẾT LUẬN
Đề tài " Đo mực nước bằng cảm biến đo khoảng cách HC-SR04 hiển thị lên LCD dùng Arduino Uno"
phụ thuộc vào mục đích và phạm vi của đề tài. Tuy nhiên, sau khi hoàn thành đề tài, ta có thể đưa ra
một số kết luận như sau: là một đề tài tốt và có tính ứng dụng cao trong đời sống thực tế. Hệ thống đo
mực nước sử dụng cảm biến khoảng cách HC-SR04 và hiển thị trên màn hình LCD đã được triển khai
thành công và hoạt động tốt. Đề tài cũng giải thích rõ ràng về nguyên lý hoạt động và các bước thực
hiện để người đọc có thể dễ dàng triển khai hệ thống này. Tuy nhiên, để cải tiến hơn nữa, đề tài có thể
sử dụng các loại cảm biến khác nhau để đo mực nước trong các bể chứa, hồ bơi hoặc các thiết bị liên
quan đến nước có kích thước lớn hơn và sâu hơn. Tóm lại, đề tài này có ý nghĩa quan trọng trong việc
ứng dụng các công nghệ thông minh để quản lý và sử dụng tài nguyên nước một cách hiệu quả và tiết kiệm.
6.2 HƯỚNG PHÁT TRIỂN
Đề tài của nhóm sử dụng các công cụ lập trình, lập trình viên có thể tạo ra các ứng dụng để xử lý dữ
liệu từ HC-SR04 và điều khiển hệ thống đo mực nước. Sau đó, kiểm thử các chức năng của hệ thống lOMoARcPSD| 36625228
và sửa lỗi nếu có. Sau khi hoàn thiện các phần mềm và phần cứng, tiến hành kết hợp các thành phần để
tạo thành hệ thống hoàn chỉnh.
Sử dụng các loại cảm biến khác nhau: Để đo mực nước trong các bể chứa hoặc hồ bơi có kích thước
lớn hơn và sâu hơn, có thể sử dụng các loại cảm biến khác như cảm biến áp suất hoặc cảm biến áp lực
để đo mực nước chính xác hơn.
Sử dụng mạng không dây: Để giám sát mực nước từ xa và theo dõi thời gian thực, có thể kết nối hệ
thống đo mực nước với mạng không dây và truyền dữ liệu về một trung tâm điều khiển.
Sử dụng các thiết bị cảnh báo: Để đảm bảo an toàn và tiết kiệm tài nguyên nước, có thể sử dụng các
thiết bị cảnh báo để thông báo khi mực nước quá cao hoặc quá thấp.
Tích hợp thêm các chức năng khác: Để tăng tính ứng dụng và tiện ích của hệ thống đo mực nước, có
thể tích hợp thêm các chức năng khác như đo nhiệt độ, đo độ pH, đo mức độ độc hại trong nước..
TÀI LIỆU THAM KHẢO lOMoARcPSD| 36625228
Tài liệu liên quan:
-

Cảm biến đa tham số trong hệ thống báo cháy môn Công nghệ cảm biến | Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
38 19 -

Báo cáo Chương 19: Cảm biến Đo Biến Dạng (Strain Gages) | Môn Công nghệ cảm biến - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
164 82 -

Chapter 8: Hydraulic Systems Overview and Applications | Môn Công nghệ cảm biến - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
132 66 -

Final Exam: Digital Color Output and ISO Standards Compliance | Môn Công nghệ cảm biến - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
160 80 -

Đề tài Báo cáo Môn Công Nghệ Cảm Biến - Chi Tiết Các Chương 4 - 10 | Môn Công nghệ cảm biến - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
159 80