Tính Toán Thiết Kế Robot Khắc Chữ RRT | Môn Thiết kế hệ thống điện - Trường Cao đẳng Công Nghệ Bách Khoa Hà Nội
Cùng với sự phát triển không ngừng của các ngành khoa học kỹ thuật, các ngành công nghiệp cũng phát triển nhanh chóng. Việc áp dụng các máy móc hiện đại vào sản suất là một yêu cầu không thể thiếu trong các nhà máy nhằm tăng năng suất, tăng chất lượng và giảm giá thành sản phẩm. Tài liệu được sưu tầm gồm 47 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: Thiết kế hệ thống điện 2 tài liệu
Trường: Trường Cao đẳng Công Nghệ Bách Khoa Hà Nội 106 tài liệu
Tác giả:








Preview text:
lOMoAR cPSD| 58675420 ----- ----- BÁO CÁO
ĐỒ ÁN HỆ THỐNG CƠ ĐIỆN TỬ Đề Tài:
Tính Toán Thiết Kế Robot Khắc Chữ RRT GVHD
: Th.S Nguyễn Tiến Thịnh Sinh viên
: Trần Hoài Ninh Lớp
: 62CĐT 1 Mã sinh viên : 2051204429
Hà Nội, …/2024 Trưởng bộ môn Người ra đề
(Ký, ghi rõ họ tên)
(Ký, ghi rõ họ tên) TS. Nguyễn Huy Thế
Th.S Nguyễn Tiến Thịnh Sinh viên nhận đề: Lớp: 62CĐT1 Chữ ký sinh Trần Hoài Ninh MSSV:2051204429 viên:
Tên đề tài: TÍNH TOÁN THIẾT KẾ ROBOT KHẮC CHỮ KIỂU RRT Yêu cầu:
Không gian làm việc: 500x600x400 (mm) Dạng robot: RRT
Quỹ đạo làm việc: di chuyển trên đường con Parabol AB
+) Tọa độ điểm đầu A (450, 0, 0)
+) Tọa độ điểm cuối B (100, 450, 0)
Nội dung thực hiện: Thuyết minh:
1. Phân tích lựa chọn cấu trúc robot
1.1 Số bậc tự do cần thiết
1.2 Phân tích cấu trúc và phương án thiết kế robot
2. Bài toán động học robot
2.1 Bảng tham số động học D-H-C
2.2 Bài toán động học thuận
2.3 Bài toán động học ngược 3. Thiết kế robot
3.1 Giới thiệu phần mềm thiết kế 3D
3.2 Thiết kế các chi tiết của robot
3.3 Lắp ráp các khâu và mô hình tổng thể robot
3.4 Mô phỏng lắp ráp và chuyển động của robot 3.5 Thiết kế 2D
4. Bài toán động lực học robot
4.1 Xác định các tham số động lực học
4.2 Thiết lập phương trình vi phân chuyển động của robot
4.3 Giải bài toán động lực học thuận và ngược (*)
5. Thiết kế hệ thống dẫn động
5.1 Lựa chọn động cơ dẫn động cho khâu 1
5.2 Phân tích lựa chọn hệ thống dẫn động cho khâu 1
6. Thiết kế hệ thống điều khiển (*)
6.1 Chọn luật điều khiển phù hợp
6.2 Mô phỏng trên phần mềm Matlab
Bản vẽ: 03 bản vẽ 3D
- Bản vẽ lắp tổng thể mô hình robot
- Bản vẽ tách một khâu của robot
- Bản vẽ tách một chi tiết điển hình LỜI CAM ĐOAN
Chúng em cam đoan rằng đồ án này hoàn toàn do chúng em tự tìm hiểu, tự làm theo hướng
dẫn của thầy cô. Các nội dung, kết quả đồ án này là trung thực và hoàn toàn chưa được công bố
dưới bất kì hình thức nào.
Trong đồ án có sử dụng kiến thức, các nhận xét, đánh giá và các thông số của các tác giả,
cơ quan tổ chức mà chúng em tham khảo ở nhiều nguồn khác nhau, có ghi rõ ở phần tài liệu tham khảo.
Trường Đại học Thủy lợi không có liên quan gì đến những vi phạm bản quyền, quyền tác
giả do chúng em gây ra trong quá trình làm đồ án môn học Hệ thống Cơ điện tử. Sinh viên thực hiện
(Ký và ghi rõ họ tên) LỜI CẢM ƠN
Trước tiên, chúng em xin được gửi lời cảm ơn trân trọng và sâu sắc nhất thầy Th.S Nguyễn
Tiến Thịnh đã hết sức tạo điều kiện và tận tình hướng dẫn, động viên chúng em trong suốt quá
trình nghiên cứu thực hiện đồ án này.
Em xin trân trọng cám ơn đến tất cả các quý thầy cô thuộc bộ môn Cơ Điện Tử trường Đại
Học Thuỷ Lợi, những người đã trang bị cho chúng em những kiến thức cơ bản , cũng như đã
nhiệt tình hướng dẫn giúp đỡ chúng em trong suốt khóa học vừa qua. Những góp ý, sửa chữa
của thầy cô sẽ phần nào giúp nhóm tự tin hơn trong cách thức tiếp cận với nền công nghiệp hiện
nay bởi mặc dù đã có những sự chuẩn bị của em hoặc cũng có thể kiến thức mang đến trong bài
đồ án này còn sai sót và chưa đúng. Em rất mong có được sự bổ sung, sửa chữa đó.
Một lần nữa em xin cảm ơn. Trân trọng! LỜI NÓI ĐẦU
Cùng với sự phát triển không ngừng của các ngành khoa học kỹ thuật, các ngành công
nghiệp cũng phát triển nhanh chóng. Việc áp dụng các máy móc hiện đại vào sản suất là một yêu
cầu không thể thiếu trong các nhà máy nhằm tăng năng suất, tăng chất lượng và giảm giá thành
sản phẩm. Song song với sự phát triển đó, công nghệ chế tạo Robot cũng phát triển nhanh chóng
đặc biệt là ở các nước phát triển nhằm đáp các nhu cầu về sản xuất, sinh hoạt, quốc phòng…
Robot có thể thực hiện những công việc mà con người khó thực hiện và thậm chí không
thực hiện được như: làm những công việc đòi hỏi độ chính xác cao, làm việc trong môi trường
nguy hiểm (như lò phản ứng hạt nhân , dò phá mìn trong quân sự), thám hiểm không gian vũ trụ…
“Đồ án Hệ thống Cơ điện tử – Robot” là một học phần bắt buộc trong chương trình đào
tạo Kiến thức ngành Cơ điện tử, học phần giúp cho sinh viên bước đầu làm quen với việc thiết
kế cơ khí của một hệ thống Robot cơ bản, ứng dụng phần mềm SOLIDWORK 2D/3D, mô phỏng
nguyên lý hoạt động robot, giúp cho sinh viên nắm vững được các kiến thức cơ bản của các học
phần và làm quen với nhiệm vụ của người kỹ sư. Có thể nói đây là học phần không thể thiếu
được đối với sinh viên chuyên ngành Cơ điện tử.
Với bố cục gồm 2 phần chính:
1.Tổng quan về robot
Phần này sẽ là cái nhìn sơ qua về Robot bao gồm lịch sử phát triển, phân loại và ứng dụng
hiện nay giúp chúng ta hình dung tính quan trọng cũng như sự hữu dụng của nó tới cuộc sống.
2. Tính toán thiết kế robot khắc chữ
Bao gồm các bước thiết kế cho đến việc mô phỏng để kiểm chứng tính đúng đắn của quá
trình thiết kế sẽ cung cấp các quá trình cơ bản để có thể xác định cách có thể một sản phẩm
Robot được đưa vào ứng dụng trong cuộc sống.
CHƯƠNG 1: PHÂN TÍCH LỰA CHỌN CẤU TRÚC ROBOT
1.1 Số bậc tự do cần thiết
- Bậc tự do là một khái niệm quan trọng trong thống kê để đo đạc số lượng độc lập có thể
thay đổi trong một mô hình hoặc một bộ dữ liệu mà không làm thay đổi quy luật hoặc ràng buộc của mô hình đó.
Để tính số bậc tự do cần thiết cho robot ta có công thức tổng quát: W = Wo – R (1.1/tr12/NLM) Trong đó: • W : số bậc tự do
• Wo: tổng số bậc tự do của các khâu động của cơ cấu khi để rời trong hệ quy chiếu gắn liền với giá
• R: tổng số rằng buộc do các khớp động trong cơ cấu
Để xác định công thức tính bậc tự do cho robot, ta cần xác định cơ cấu robot là không gian hay
phẳng bằng cách xác định vị trí mặt phẳng làm việc của robot
1. Robot cơ cấu không gian (3D Robot):
- Là loại robot có khả năng di chuyển và thực hiện các tác vụ trong không gian ba chiều,bao
gồm các phương hướng x, y, z.
- Robot có khả năng di chuyển và làm việc trong môi trường không gian phức tạp, yêu cầuđộ linh hoạt, chính xác cao.
VD: Robot phẫu thuật da Vinci là một robot cơ cấu không gian.
Nó được sử dụng trong phẫu thuật tiêu chuẩn và tác động như một phần mở rộng của bàn
tay bác sĩ để thao tác các thủ thuật phức tạp.
- Công thức xác định số bậc tự do cho cơ cấu không gian:
W=6n−(∑ j P (1.8/tr15/NLM)
j−Rtr−Rth)−Wth Trong đó: • W: số bậc tự do • n: số khâu động
• ∑ jP j: tổng số các khâu
• R : số ràng buộc trùng tr
• R : số ràng buộc thừa th
• W :số bậc tự do thừa th
2. Robot cơ cấu phẳng (2D Robot):
- Là loại robot hoạt động làm việc trong không gian hai chiều, chủ yếu trên bề mặt phẳngxy.
- Robot giới hạn các khâu quay theo 1 phương duy nhất và các khâu tịnh tiến theo
phươngvuông góc với khâu quay.
VD: Robot hút bụi là cơ cấu robot phẳng. Chúng được thiết kế để làm sạch sàn nhà bằng
cách di chuyển qua lại trên bề mặt sàn nhà và sử dụng cảm biến tránh các vật cản.
- Công thức tính số bậc tự do cho cơ cấu phẳng:
W=3n−(2 p (1.11/tr16/NLM)
5+p4−Rtr−Rth)−Wth Trong đó: • W: số bậc tự do • n: số khâu động
• p : số khâu loại 5 : số khâu loại 4 5 p4
• R : số ràng buộc trùng tr
• R : số ràng buộc thừa th
• W :số bậc tự do thừa th
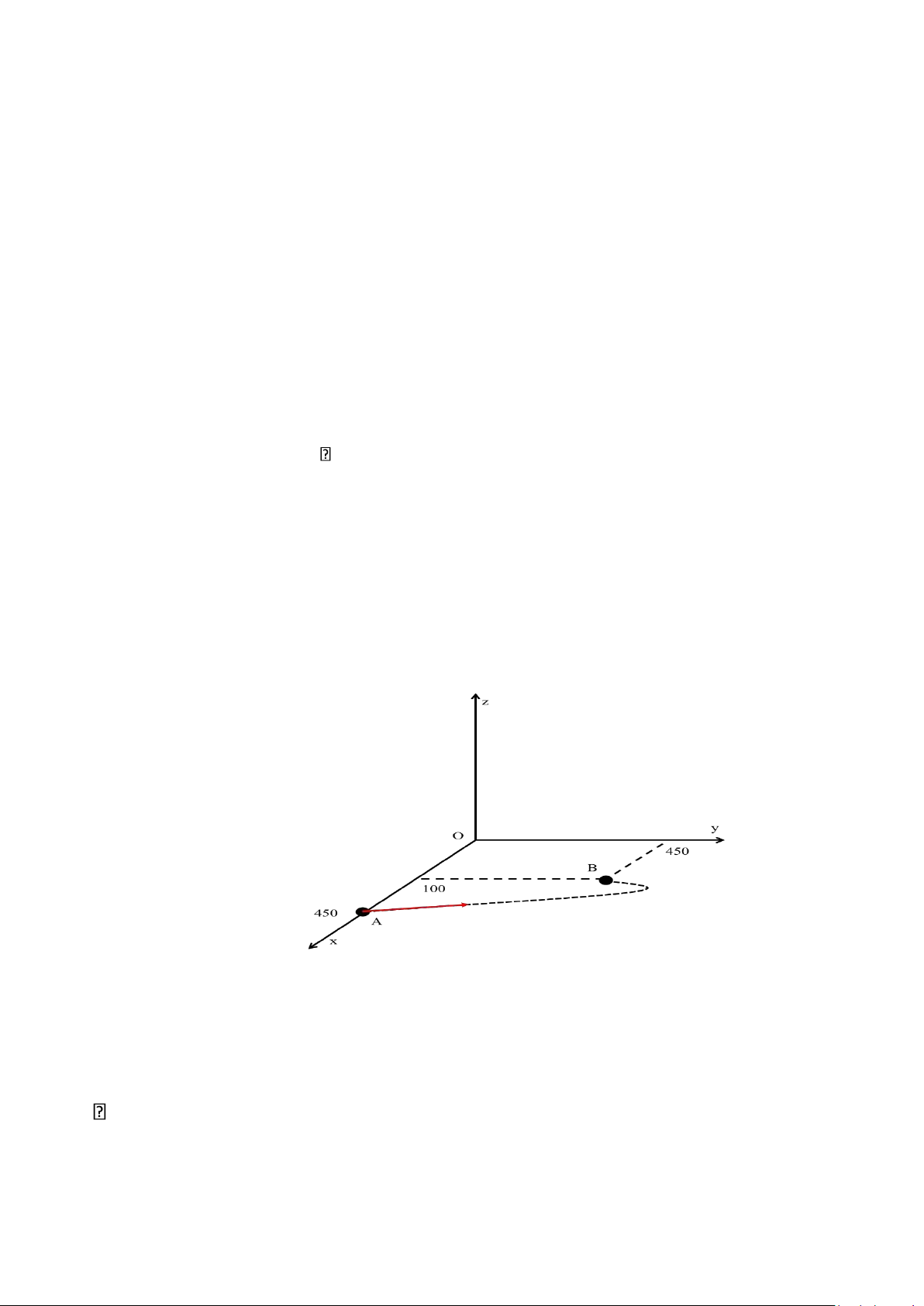
- Xác định quỹ đạo làm việc trong không gian làm việc
• Không gian làm việc: 500x600x400 mm
• Quỹ đạo đường thẳng: điểm đầu A(450,0,0); điểm cuối B(100,500,0)
Hình 1.1: Quỹ đạo làm việc chuyển động
- Từ hình, ta thấy robot làm việc trong 3 mặt phẳng nên robot cần hoạt động linh hoạt và có
khả năng tiếp xúc đc cả 3 mặt phẳng. Suy ra ta sử dụng cơ cấu robot trong không gian.
Vậy ta áp dụng công thức tính bậc tự do cho cơ cấu không gian:
W=6n−(∑ j Pj−Rtr−Rth)−Wth (1.8/tr15/NLM)
1.2 Phân tích một số cấu trúc thỏa mãn và lựa chọn phương án thiết kế
Một số dạng cấu trúc thỏa mãn:
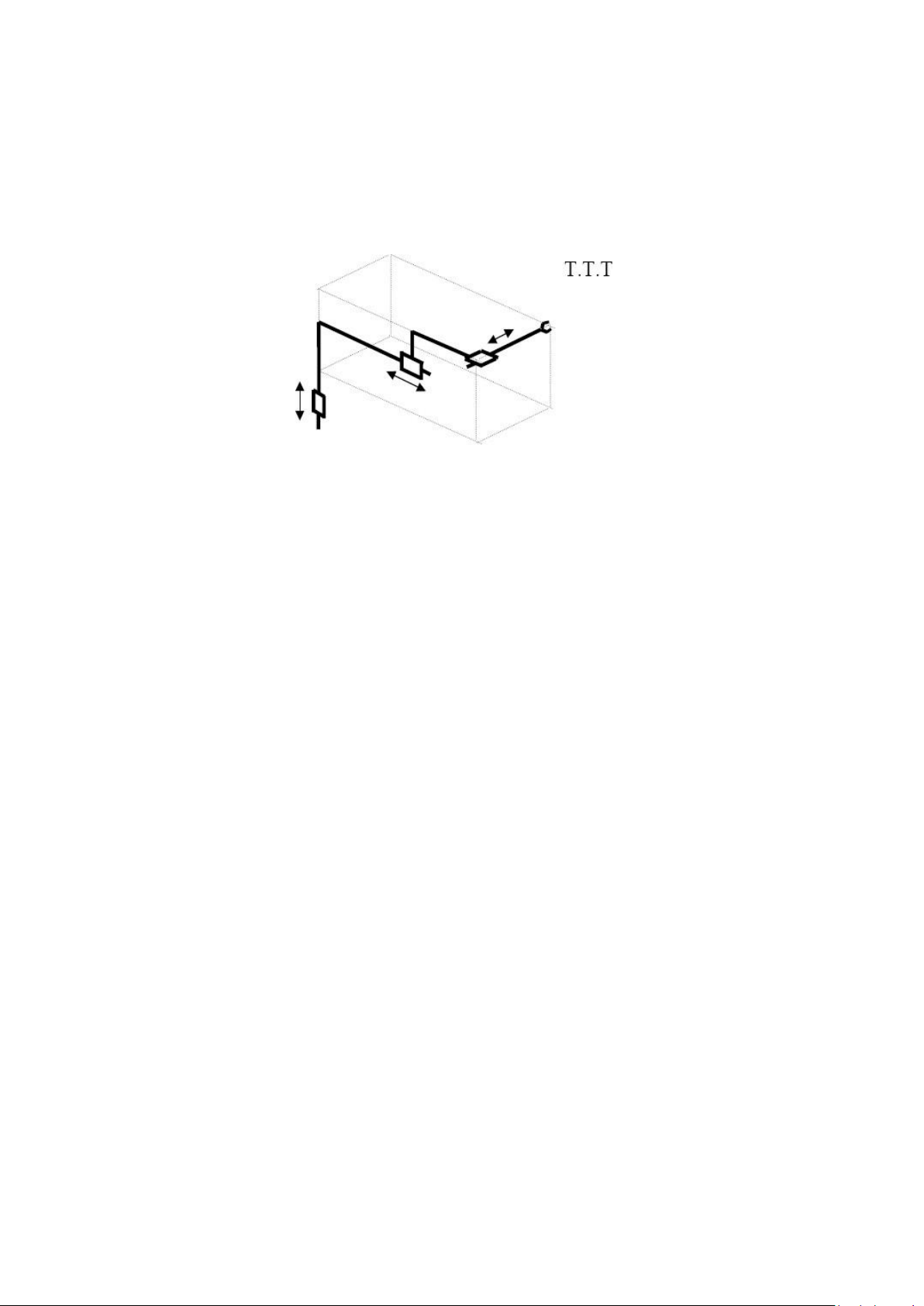
- Cơ cấu robot tọa độ đề các: Là tay máy có 3 chuyển động cơ bản tịnh tiến theo phương của
các trục hệ tọa độ gốc (cấu hình TTT) . Không gian làm việc của tay máy có dạng khối chữ nhật.
Hình 1.2: Cơ cấu toạ độ đề các Ưu điểm:
- Khả năng tải trọng lớn: Cấu trúc robot tọa độ đề các có khả năng tải trọng lớn hơn so với các
cấu trúc robot khác, giúp nó có thể xử lý các tác vụ nặng hơn và đa dạng hơn.
- Khả năng làm việc trong không gian lớn: Cấu trúc này thường được sử dụng trong các ứng
dụng có không gian làm việc lớn, như trong sản xuất ô tô.
Độ chính xác cao: Cấu trúc robot tọa độ đề các có thể di chuyển chính xác trong không gian
3 chiều, giúp tăng độ chính xác trong quá trình sản xuất.
Khả năng xử lý các tác vụ phức tạp: Cấu trúc robot tọa độ đề các có khả năng xử lý các tác
vụ phức tạp hơn so với các cấu trúc robot khác, nhờ khả năng di chuyển trong không gian
lớn và tải trọng lớn. Nhược điểm:
- Thiết kế phức tạp: Cấu trúc robot tọa độ đề các có thiết kế phức tạp hơn so với các cấu trúc
robot khác, gây khó khăn trong việc lắp đặt và bảo trì.
- Tốc độ di chuyển chậm hơn: Do cấu trúc robot tọa độ đề các có kích thước lớn hơn, nên tốc
độ di chuyển của nó thường chậm hơn so với các cấu trúc robot khác.
- Chi phí đầu tư cao: Do thiết kế phức tạp và khả năng tải trọng lớn, nên chi phí đầu tư cho cấu
trúc robot tọa độ đề các thường cao hơn so với các cấu trúc robot khác.
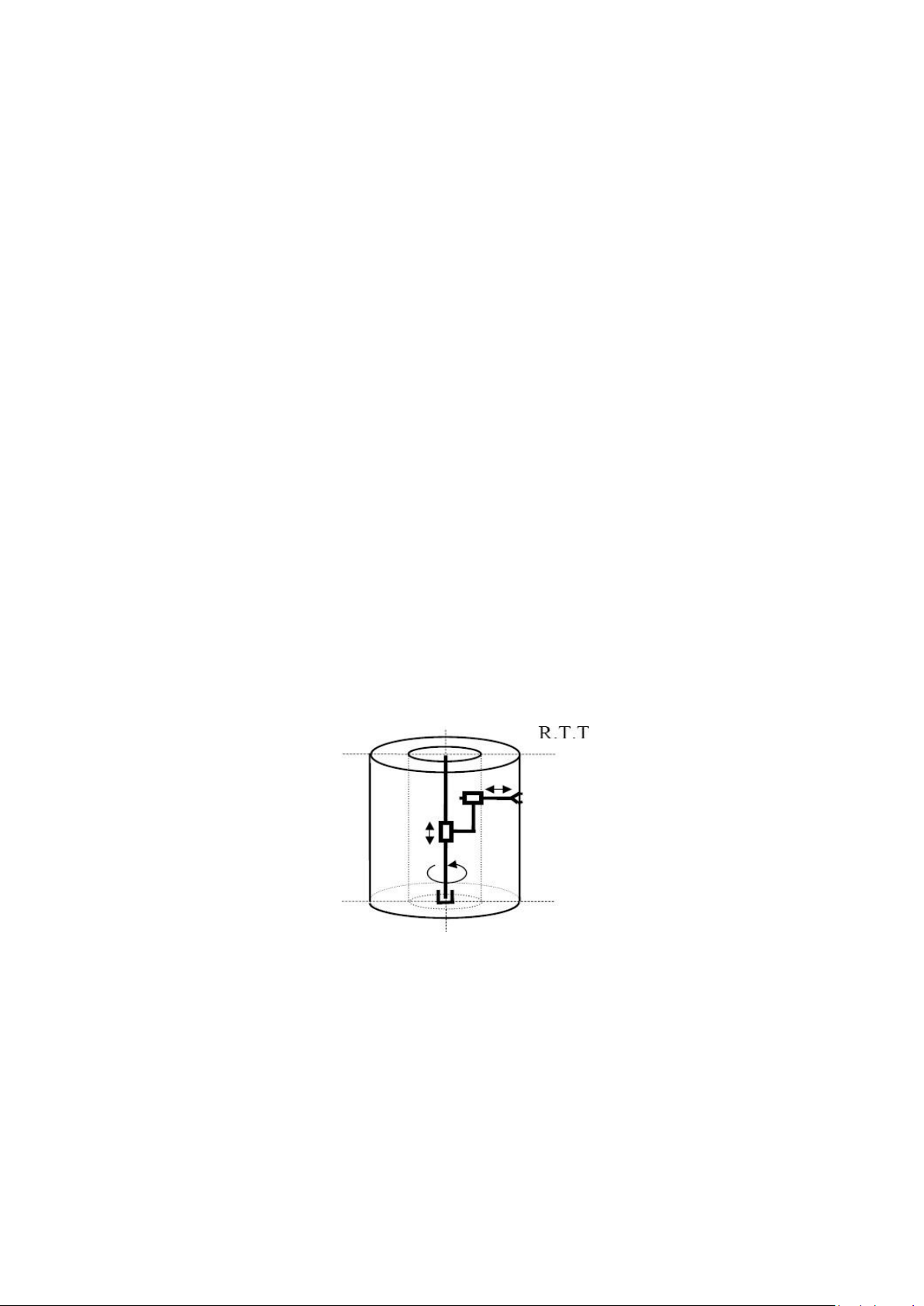
- Cơ cấu robot tọa độ trụ: khác với tay máy kiểu đề các ở khớp đầu tiên: dùng khớp quay
thay cho khớp trượt. Vùng làm việc của nó có dạng hình trụ rỗng. Khớp trượt nằm ngang cho
phép tay máy “thò” được vào khoang rỗng nằm ngang..
Hình 1.3: Cơ cấu tọa độ trục Ưu điểm:
- Tốc độ di chuyển nhanh: Cấu trúc robot tọa độ trụ có khả năng di chuyển nhanh hơn so với
các cấu trúc robot khác, giúp tăng năng suất sản xuất.
- Khả năng làm việc trong không gian nhỏ: Cấu trúc này thường được sử dụng trong các ứng
dụng có không gian làm việc nhỏ, như trong sản xuất điện tử hoặc sản xuất đồ gia dụng.
Chi phí đầu tư thấp: Do thiết kế đơn giản và kích thước nhỏ hơn so với các cấu trúc robot
khác, nên chi phí đầu tư cho cấu trúc robot tọa độ trụ thường thấp hơn.
Độ chính xác cao: Cấu trúc robot tọa độ trụ có khả năng di chuyển chính xác trong không
gian 2 chiều, giúp tăng độ chính xác trong quá trình sản xuất. Nhược điểm:
- Khả năng tải trọng thấp: Cấu trúc robot tọa độ trụ có khả năng tải trọng thấp hơn so với các
cấu trúc robot khác, giới hạn khả năng xử lý các tác vụ nặng hơn.
- Khả năng xử lý các tác vụ phức tạp hạn chế: Do khả năng di chuyển trong không gian 2 chiều,
nên cấu trúc robot tọa độ trụ có khả năng xử lý các tác vụ phức tạp hạn chế hơn so với các cấu trúc robot khác.
- Khả năng làm việc trong không gian 3 chiều hạn chế: Cấu trúc robot tọa độ trụ có khả năng
làm việc trong không gian 3 chiều hạn chế hơn so với các cấu trúc robot khác, giới hạn khả
năng ứng dụng của nó trong một số lĩnh vực sản xuất.
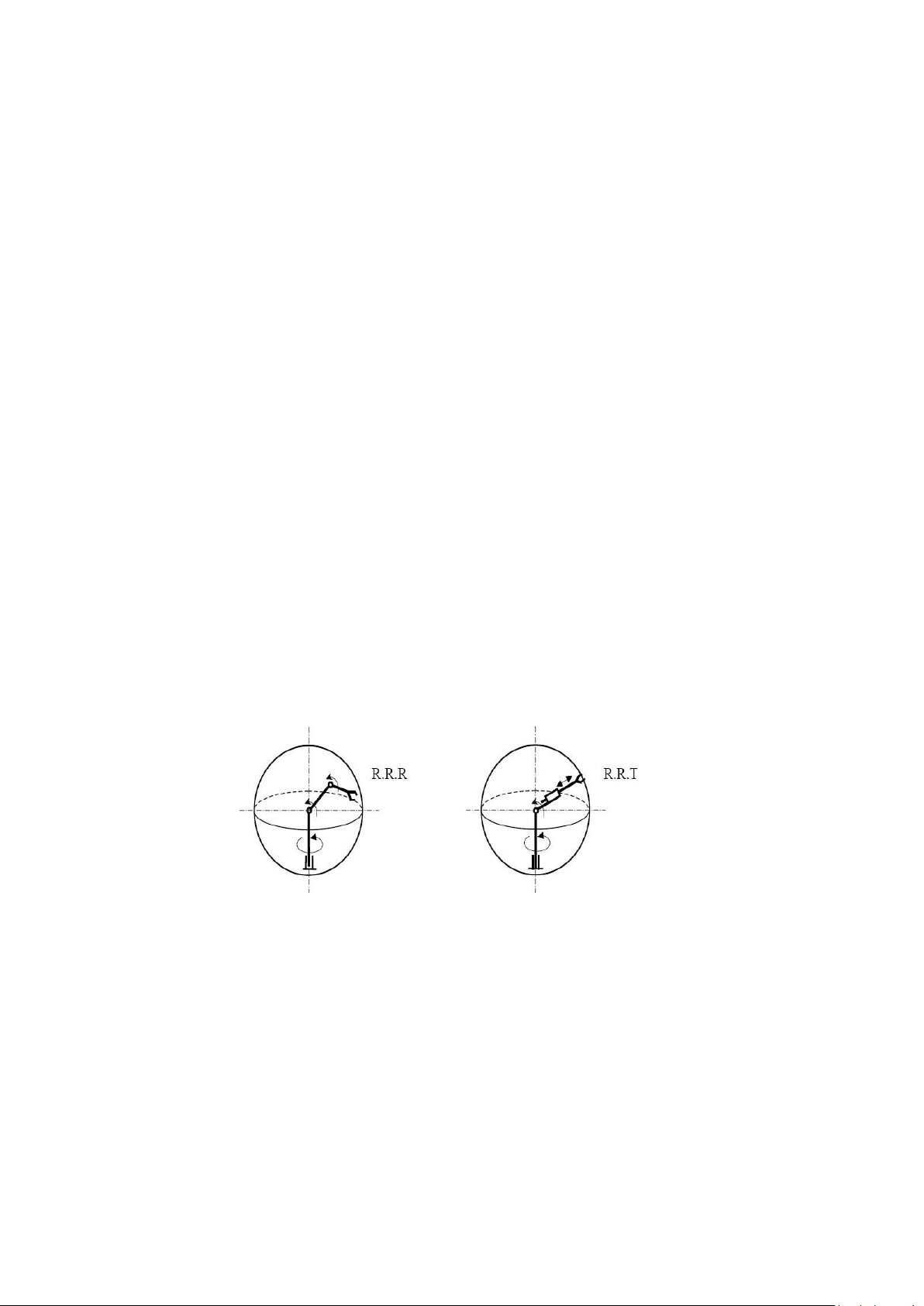
- Cơ cấu robot tọa độ cầu: Là tay máy có 2 khớp đầu cơ bản là khớp xoay (cấu hình RRR
hoặc RRT). Không gian làm việc của tay máy có dạng khối cầu.
Hình 1.4: Cơ cấu toạ độ cầu Ưu điểm:
- Khả năng di chuyển trong không gian 3 chiều: Cấu trúc robot tọa độ cầu có khả năng di
chuyển trong không gian 3 chiều, giúp tăng khả năng ứng dụng của nó trong nhiều lĩnh vực sản xuất.
- Khả năng tải trọng cao: Cấu trúc này có khả năng tải trọng cao hơn so với các cấu trúc robot
khác, giúp xử lý các tác vụ nặng hơn.
Khả năng xử lý các tác vụ phức tạp: Cấu trúc robot tọa độ cầu có khả năng xử lý các tác vụ
phức tạp hơn so với các cấu trúc robot khác, giúp tăng độ chính xác và năng suất sản xuất.
Độ chính xác cao: Cấu trúc robot tọa độ cầu có khả năng di chuyển chính xác trong không
gian 3 chiều, giúp tăng độ chính xác trong quá trình sản xuất. Nhược điểm:
- Chi phí đầu tư cao: Do cấu trúc phức tạp và khả năng tải trọng cao, nên chi phí đầu tư cho
cấu trúc robot tọa độ cầu thường cao hơn so với các cấu trúc robot khác.
- Khả năng làm việc trong không gian nhỏ hạn chế: Cấu trúc robot tọa độ cầu có kích thước
lớn hơn so với các cấu trúc robot khác, giới hạn khả năng làm việc trong không gian nhỏ.
- Khả năng di chuyển chậm hơn: Do cấu trúc phức tạp và khả năng di chuyển trong không gian
3 chiều, nên cấu trúc robot tọa độ cầu có khả năng di chuyển chậm hơn so với các cấu trúc robot khác.
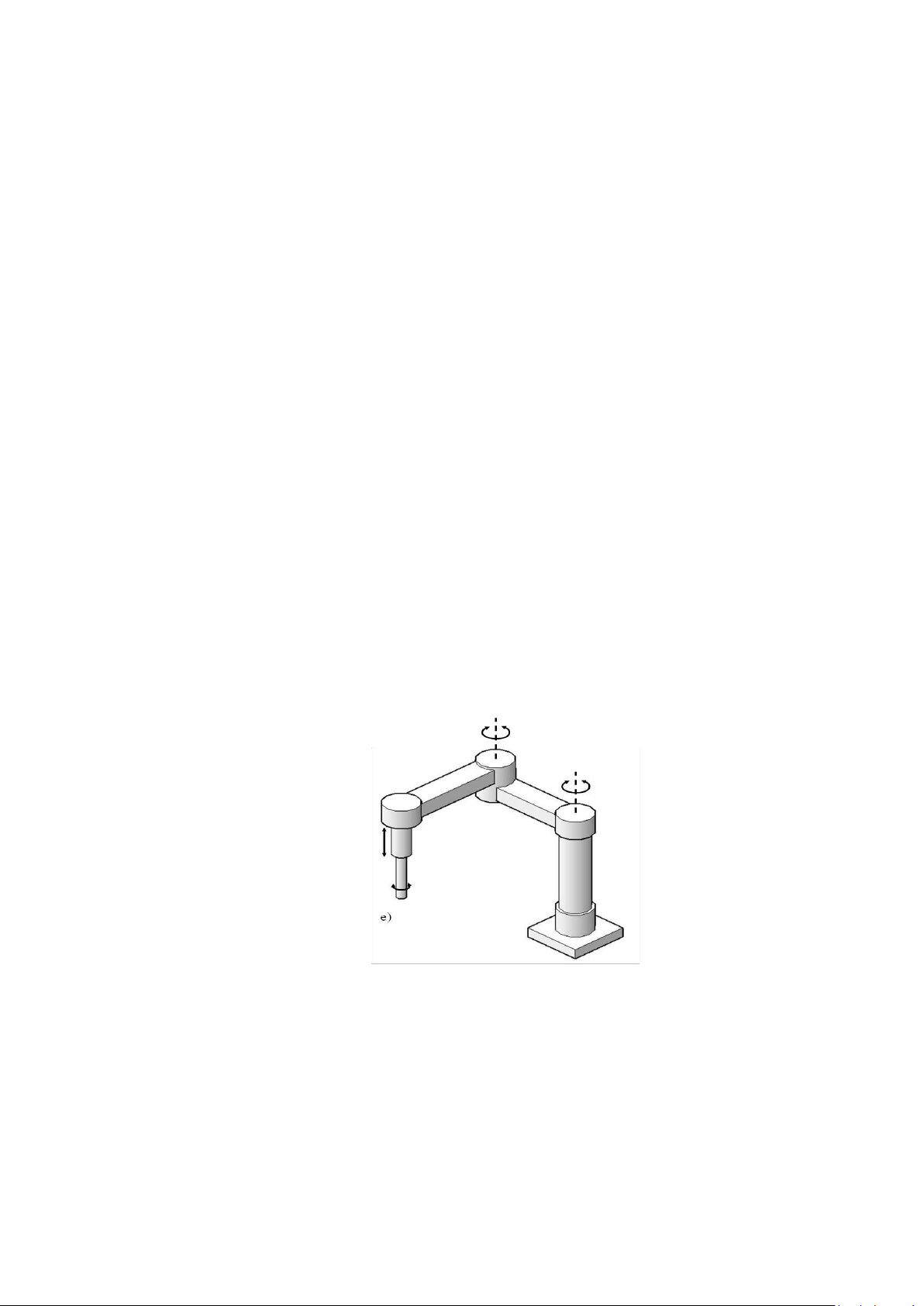
- Cơ cấu robot tọa độ SCARA: Là một kiêu tay máy có cấu tạo đặc biệt, gồm 2 khớp quay
và 1 khớp trượt, nhưng cả 3 khớp đều có trục song song với nhau. Vùng làm việc của SCARA
là một phần của hình trụ rỗng.
Hình 1.5: Cơ cấu tọa độ SCARA Ưu điểm:
- Khả năng di chuyển nhanh và chính xác: Cấu trúc robot tọa độ SCARA có khả năng di chuyển
nhanh và chính xác trong không gian 3 chiều, giúp tăng độ chính xác và năng suất sản xuất.
Khả năng làm việc trong không gian nhỏ: Cấu trúc robot tọa độ SCARA có kích thước nhỏ
hơn so với các cấu trúc robot khác, giúp tăng khả năng làm việc trong không gian nhỏ.
Chi phí đầu tư thấp: Do cấu trúc đơn giản và kích thước nhỏ, nên chi phí cho cấu trúc robot
tọa độ SCARA thường thấp hơn so với các cấu trúc robot khác.
- Khả năng xử lý các tác vụ lắp ráp: Cấu trúc robot tọa độ SCARA có khả năng xử lý các tác
vụ lắp ráp, giúp tăng độ chính xác và năng suất sản xuất. Nhược điểm:
- Khả năng di chuyển hạn chế: Cấu trúc robot tọa độ SCARA chỉ có khả năng di chuyển trong
không gian nhỏ, giới hạn khả năng ứng dụng của nó trong một số lĩnh vực sản xuất.
- Khả năng tải trọng hạn chế: Cấu trúc robot tọa độ SCARA có khả năng tải trọng hạn chế hơn
so với các cấu trúc robot khác, giới hạn khả năng xử lý các tác vụ nặng hơn.
- Khả năng xử lý các tác vụ phức tạp hạn chế: Cấu trúc robot tọa độ SCARA có khả năng xử
lý các tác vụ phức tạp hạn chế hơn so với các cấu trúc robot khác, do chỉ có khả năng di
chuyển xoay và tịnh tiến trên một trục.
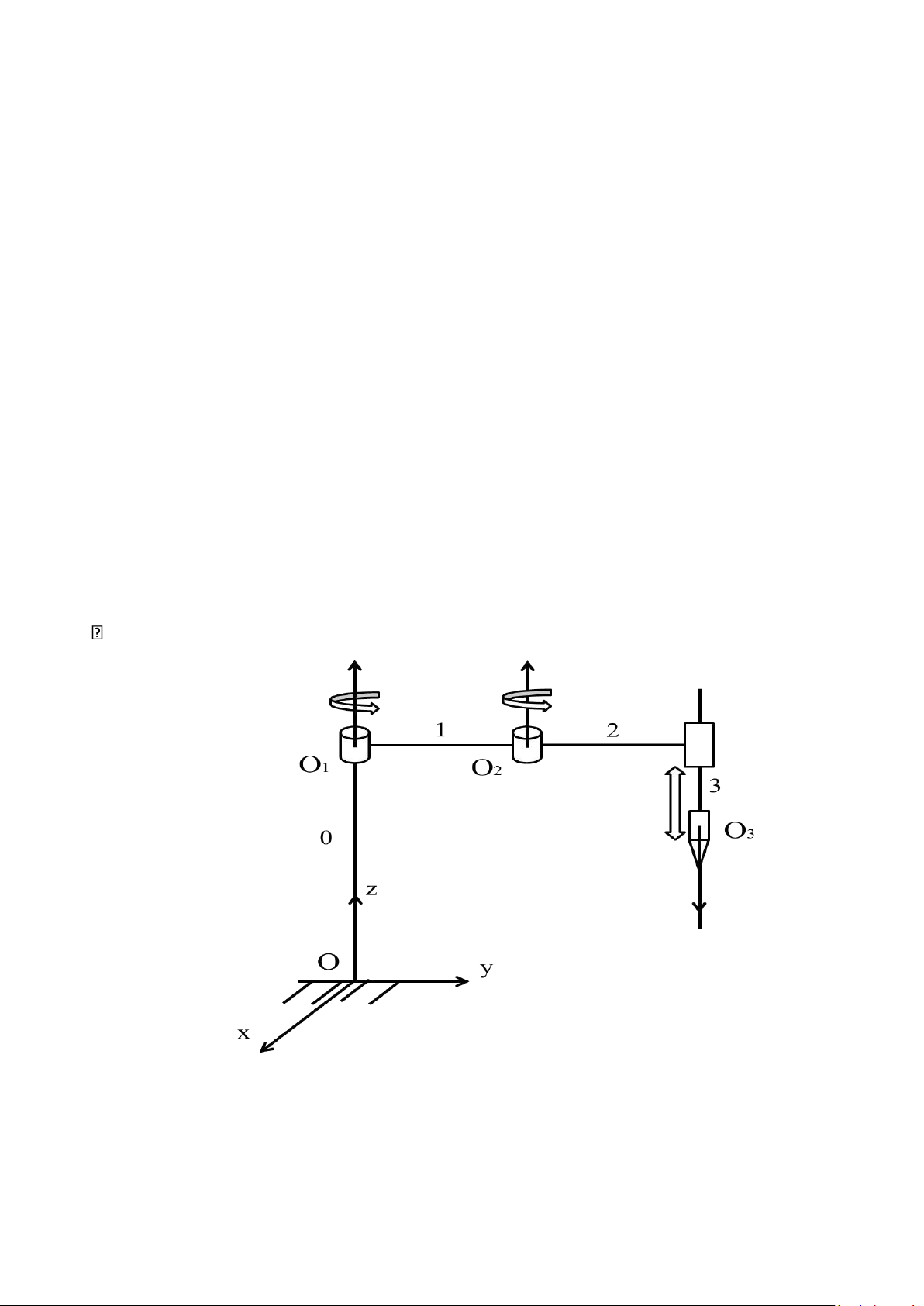
Lựa chọn phương án thiết kế:
Hình 1.6: Robot SCARA 3 bậc tự do RRT
Để tiết kiệm về mặt kinh tế nhưng vẫn đảm bảo được các yêu cầu của bài toán đặt ra, ta lựa
chọn phương án thiết kế SCARA có 2 khâu quay xác định định vị trí và bao quát các điểm trên
các mặt phẳng, một khâu chuyển động tịnh tiến để xác định mặt phẳng làm việc và điều chỉnh
sự linh hoạt của đầu khắc tránh va chạm trong môi trường làm việc. Do đó việc lựa chọn phương
án này hoàn toàn thỏa mãn yêu cầu bài toán.
Ở phương án này, ta sử dụng hệ điều khiển hở bằng động cơ step và bộ truyền đai nên chỉ
cần chọn các loại khớp thấp loại 5 cho 3 khâu làm việc. Khớp đầu tiên là khớp xoay quanh trục
Z có tác dụng xác định tọa độ làm việc. Khớp thứ hai cũng là khớp xoay quanh trục Z có tác
dụng tạo sự linh hoạt và tăng không gian cho robot. Khớp thứ ba là khớp trượt tịnh tiến theo
phương Z có tác dụng di chuyển tới mặt phẳng làm việc.
Vì bài toán yêu cầu robot làm việc trên một đoạn thẳng với A(450,0,0) là điểm đầu và
B(100,450,300) là điểm cuối nên đoạn thẳng không nằm trên cùng mặt phẳng nhưng nằm trong
cùng không gian 500x600x400.
Công thức số bậc tự do của robot là:
W=6n−(∑ j Pj−Rtr−Rth)−Wth (1.8/tr15/NLM) Trong đó:
W : số bậc tự do trong robot n : số khâu động của cơ cấu = 3 j : là loại khớp sử dụng trong
cơ cấu = 5 (Vì điều khiển hở nên robot sử dụng khớp thấp để dễ tính toán) p : số khớp loại
j trong cơ cấu = 3 (Vì robot 3 khâu chỉ dùng khớp loại 5)
Rtr : số rằng buộc trùng của cơ cấu = 0 (Vì cơ cấu không có khớp đóng kín hạn chế chuyển động)
Rth : số rằng buộc thừa của cơ cấu = 0 (Vì các khớp trong cơ cấu chỉ được 2 khâu hạn chế chuyển động)
Wth : số bậc tự do thừa = 0 (Vì trong không gian làm việc chi có 3 khâu chuyển động được
kết nối với nhau qua các khớp)
W=6.3−(5.3−0−0)−0=3(DOF)
Ưu điểm của phương án này so với các phương án khác:
+) Tốc độ và độ chính xác cao: Cơ cấu robot SCARA có thể di chuyển nhanh và chính xác
trong không gian ba chiều, cho phép thực hiện các tác vụ sản xuất với tốc độ cao và độ chính xác cao.
+) Điều khiển dễ dàng: Xây dựng hệ thống điều khiển các khớp dễ dàng thuận tiện và gần như có thể độc lập.
+) Thiết kế nhỏ gọn, đơn giản: Cơ cấu robot SCARA có thiết kế nhỏ gọn, đơn giản giúp
tiết kiệm không gian mà vẫn đảm bảo tính linh hoạt.
Nhược điểm của phương án này so với các phương án khác:
+) Hạn chế trong việc di chuyển đến các vị trí không gian cao hoặc khó tiếp cận: Cơ cấu
robot SCARA có hạn chế trong việc di chuyển đến các vị trí không gian cao hoặc khó tiếp cận,
do đó không phù hợp cho các ứng dụng yêu cầu di chuyển trong không gian lớn hoặc phức tạp.
+) Khả năng tải trọng hạn chế: Cơ cấu robot SCARA có khả năng tải trọng hạn chế so với
một số loại robot khác, do đó không phù hợp cho các ứng dụng yêu cầu tải trọng lớn. Phân tích khâu khớp 1) Khâu 1:
• Tác dụng nâng đỡ khâu 2, 3
• Giúp tăng chiều cao của robot tiếp cận điểm làm việc 1 cách linh hoạt
• Sử dụng khớp quay quanh trục Z0, Z1 2) Khâu 2:
• Tác dụng nâng đỡ khâu 3
• Giúp tăng chiều dài tay robot tiếp cận điểm làm việc 1 cách linh hoạt
• Sử dụng khớp xoay quanh trục Z1, Z2 3) Khâu 3:
• Tác dụng nâng đỡ đầu khắc
• Giúp đầu khắc tiếp cận mặt phẳng làm việc 1 cách linh hoạt
• Sử dụng khớp tịnh tiến trên trục Z3 và vuông góc với trục Z2
CHƯƠNG 2: BÀI TOÁN ĐỘNG HỌC ROBOT
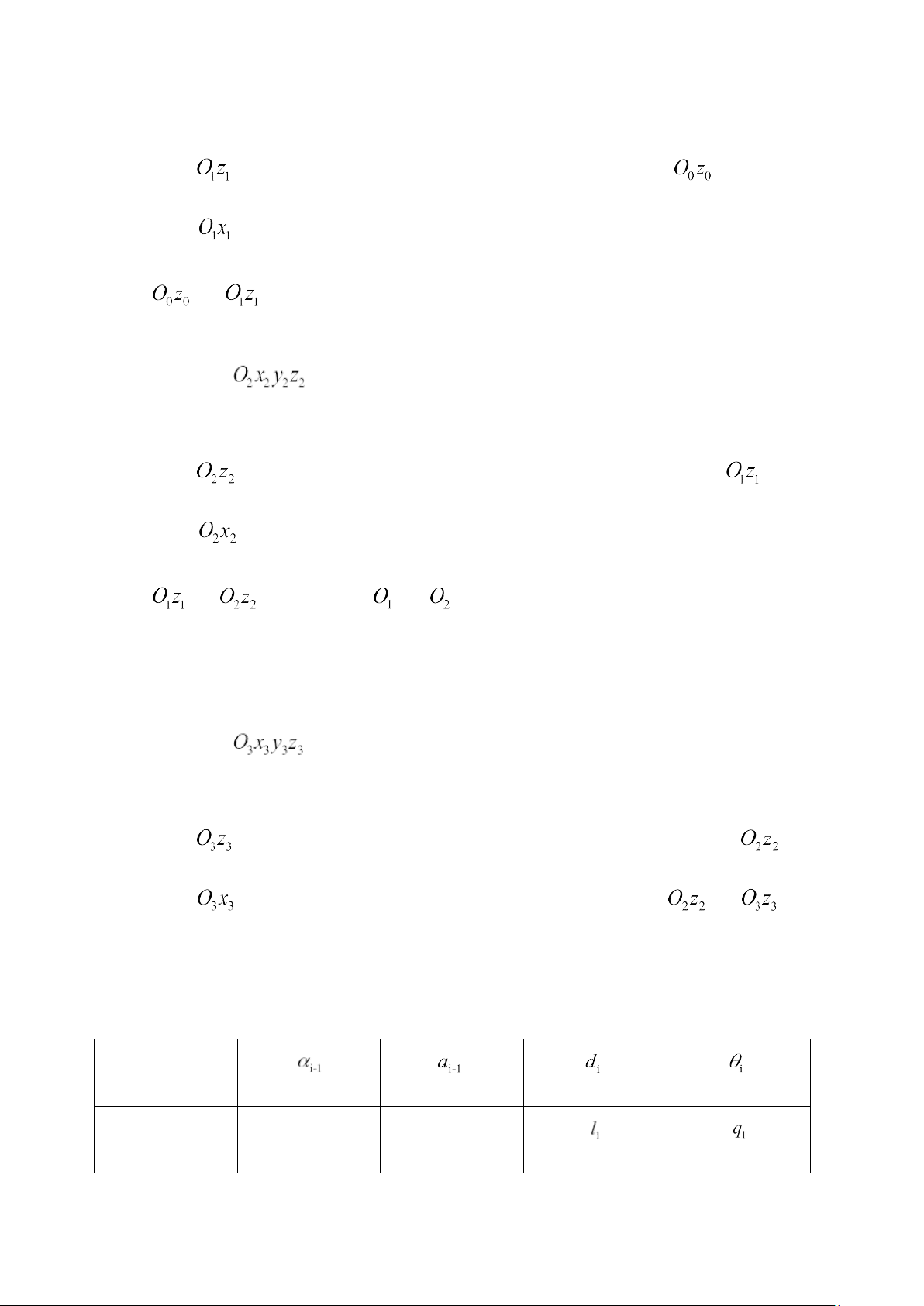
2.1 Bảng tham số động học D-H-C
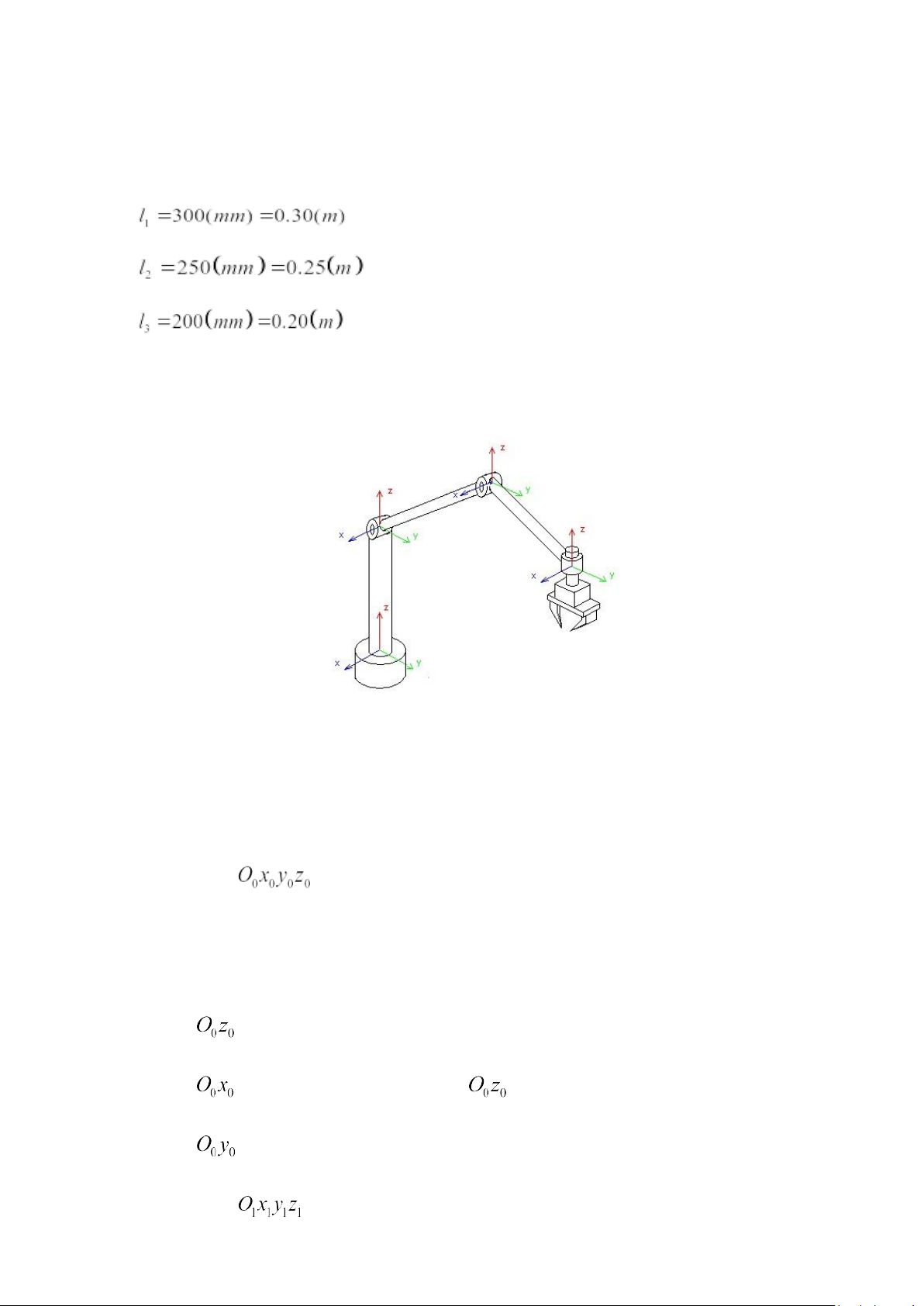
Với không gian làm việc là 500x600x400 (mm), chọn kích thước sơ bộ:
Hình 2.1: Thiết lập hệ toạ độ các khớp
Xây dựng hệ tọa độ Denavit Hartenberg Craig
• Hệ tọa độ là hệ tọa độ gốc (hệ tọa độ cố định)
Gốc tọa độ đặp tại đầu khâu tại vị trí đặt robot
Trục dọc theo phương thẳng đứng, hướng từ dưới lên
Trục có phương vuông góc với , hướng từ trong ra ngoài
Trục xác định theo quy tắc tam diện thuận • Hệ tọa độ
Gốc đặt tại tâm của khớp động quay thứ 1 Trục
phương dọc theo khớp động thứ 1 và trùng với trục
Trục có phương dọc theo trục khâu thứ 1, nằm trên đường vuông góc chung của và và
chiều hướng từ khâu 1 hướng sang khâu 2 • Hệ tọa độ
Gốc đặt tại tâm khớp động quay thứ 2 Trục
phương dọc theo khớp động thứ 2 và cùng chiều với trục
Trục có phương dọc theo trục khâu thứ 2, nằm trên đường vuông góc chung của và có
hướng từ tới và chiều hướng từ khâu 2 hướng sang khâu 3 • Hệ tọa độ
Gốc đặt tại tâm khớp động tịnh tiến thứ 3 Trục
phương dọc theo khớp động thứ 3, có chiều ngược với trục
Trục có phương nằm trên đường vuông góc chung của và , chiều hướng đến đầu khắc
Bảng 1: Bảng tham số động học Craig của robot Khâu 1 0 0 2 0 0 3 0 Trong đó: là các biến khớp
là chiều dài khâu 1, 2, 3
2.2 Bài toán động học thuận
• Các ma trận Craig địa phương:
• Các ma trận Craig toàn cục: Có Có
• Toạ độ điểm E trong hệ quy chiếu đối với khâu:
• Toạ độ vị trí điểm thao tác E trong hệ quy chiếu cố định:
• Vận tốc của điểm thao tác cuối:
Đạo hàm theo thời gian t toạ độ điểm E trong hệ quy chiếu cố định ta được vận tốc điểm thao
tác E với đơn vị là m/s.
• Gia tốc của điểm thao tác cuối:
Đạo hàm theo thời gian t vận tốc điểm E trong hệ quy chiếu cố định ta được gia tốc điểm thao tác E đơn vị là m2/s.
• Từ các ma trận Craig ta có các ma trận côsin chỉ hướng của các khâu so với hệ quy chiếu cố định:
Vận tốc góc điểm thao tác cuối E:
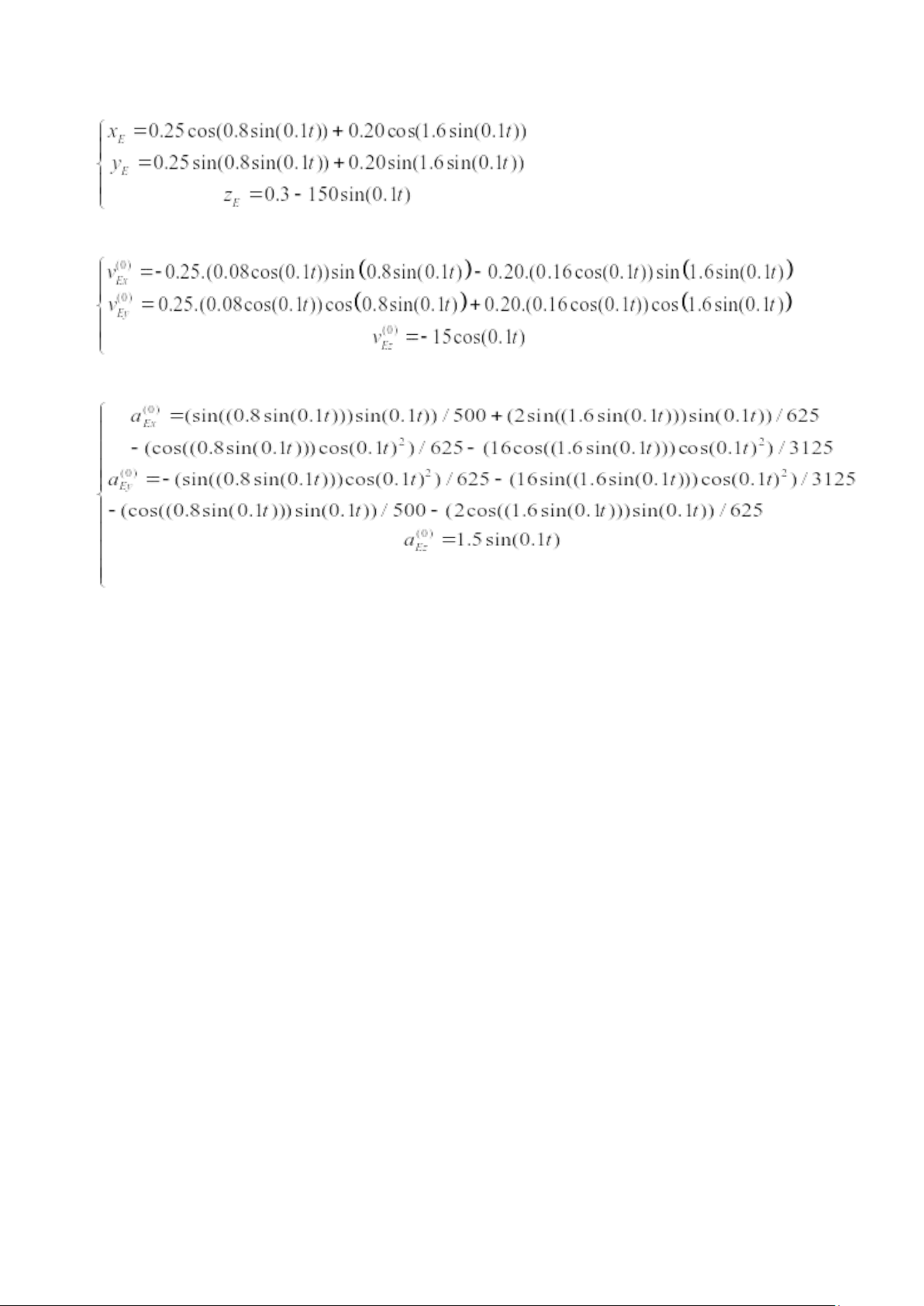
• Cho trước các quy luật chuyển động của các khâu, vẽ đồ thị quỹ đạo, vận tốc, gia tốc điểm thao tác robot
Quy luật chuyển động của các khâu:
Toạ độ điểm E theo biến t là:
Vận tốc của điểm thao tác cuối theo biến t là:
Gia tốc của điểm thao tác cuối theo biến t là:
