Tổng quan về điều khiển tốc độ Tuabin trong hệ thống thủy điện liên kết vùng để ổn định tần số lưới
Tổng quan về điều khiển tốc độ Tuabin trong hệ thống thủy điện liên kết vùng để ổn định tần số lưới được biên soạn dưới dạng file PDF cho các bạn sinh viên tham khảo, ôn tập đầy đủ kiến thức, chuẩn bị thật tốt cho kì thi sắp tới. Mời bạn đọc đón xem.
Môn: Khoa học & Công nghệ 5 tài liệu
Trường: Kỹ thuật - Công nghệ 10 tài liệu
Tác giả:




Preview text:
KHOA H Ọ C CÔNG NGHỆ P- ISS N 1859- 358 5 E- IS SN 261 5 - 961 9
TỔNG QUAN VỀ ĐIỀU KHIỂN TỐC ĐỘ TUABIN
TRONG HỆ THỐNG THỦY ĐIỆN LIÊN KẾT VÙNG
ĐỂ ỔN ĐỊNH TẦN SỐ LƯỚI
AN OVERVIEW OF SPEED TURBINE CONTROL IN A MULTI-AREA HYDROPOWER SYSTEM
TO STABILIZE THE NET FREQUENCY
Nguyễn Duy Trung1, Lê Hùng Lân 2, Nguyễn Văn Tiềm2,
Nguyễn Ngọc Khoát1, Đào Thị Mai Phương3, Hoàng Thị Thu Hương4 TÓM TẮT
Bộ điều khiển tốc độ tuabin thủy điện là khâu rất quan trọng trong quá trình phát điện của nhà máy thủy điện và bài toán ổn định tần số - phụ tải luôn được
Tập đoàn Điện lực Việt Nam rất quan tâm. Do tính cấp bách như vậy, vấn đề điều khiển này đã thu hút được rất nhiều nghiên cứu để nhằm mục đích nâng cao chất
lượng điện năng. Hiện nay trong các nhà máy thủy điện của Việt Nam, bộ điều khiển điều tốc là khâu điều chỉnh tốc độ vẫn đang sử dụng bộ điều khiển PID, chế
độ vận hành độc lập; còn chế độ liên kết vùng rất phức tạp cần có những bộ điều khiển thông minh hơn. Điều này được lý giải là trong những năm qua do hệ
thống lưới điện còn đơn giản và các thành phần nguồn phân tán chưa tham gia nhiều vào hệ thống. Tuy nhiên, hiện nay do nhu cầu phát triển kinh tế và xã hội
đòi hỏi nâng cao chất lượng điện năng, ổn định hệ thống và vận hành an toàn thì việc sử dụng bộ điều khiển PID để điều khiển tốc độ tuabin thủy lực sẽ gặp nhiều
khó khăn. Thời gian gần đây việc nghiên cứu về lí thuyết điều khiển hiện đại, điều khiển thông minh ứng dụng cho bài toán điều khiển ổn định tốc độ tuabin cũng
đã rất phát triển và thành công.
Trong bài báo này, các tác giả đã tổng hợp được các kết quả nghiên cứu, phân tích ưu điểm và nhược điểm của các nghiên cứu. Từ đó, nhóm tác giả đã đề xuất được
phương pháp thiết kế bộ điều khiển thông minh dùng logic mờ loại PI kết hợp giải thuật tối ưu hóa bầy đàn PSO. Ngoài ra, bài báo cũng đề xuất mô hình NARMA ứng
dụng mạng nơ-ron nhân tạo nhằm kiểm soát tần số - phụ tải cho nhà máy thủy điện liên kết mang lại kết quả điều khiển tốt nhất.
Từ khóa: Điều khiển PID, bộ điều khiển logic mờ loại PI, PSO, hệ thống thủy điện kết nối, thay đổi tải, độ lệch tần số, độ lệch công suất trao đổi trên đường dây ABSTRACT
The speed controller for a water turbine is a highly important component in the generation process of a hydro power system and frequency stability against load
changes is always concerned by Vietnam Electricity. Because of this urgency, many studies have focused on improving the quality of electricity. At present, in
Vietnam’s hydropower plants, most speed turbine controllers are using PID regulators in single-area operating modes; and the multi-area mode is highly complicated
needs intelligent controllers. This is because of the simplicity of the electric grids and the distributed power supply systems have not participated much in such a
network. However, at present, the socio-economic development requires power quality improvement, system stability and safe operation, thus the PID controllers
used for the turbine control have been facing a lot of difficulties. Recently, the research on modern control theory and intelligent control in dealing with the load-
frequency control of a hydropower system has been rapidly developed.
In this paper, the authors will summarize existed reports, analyze advantages and disadvantages of these studies. Thereafter, this research proposes a novel
method to design PI-based fuzzy logic controllers applying the particle swarm optimization (PSO) technique. Furthermore, this work presents a NARMA controller
applying artificial neural network (ANN) to solve the load-frequency control problem of a multi-area hydropower system with good control quality.
Keywords: PID control, PI-type fuzzy logic controller, PSO, interconnected hydropower system, load change, frequency deviation, tie-line power flow change.
1Khoa Điều khiển và Tự động hóa, Trường Đại học Điện lực
2Bộ môn Điều khiển học, Trường Đại học Giao thông vận tải
3Khoa Điện, Trường Đại học Công nghiệp Hà Nội
4Ban Quản lí dự án Điện 2, Tập đoàn Điện lực Việt Nam *Email: trungnd@epu.edu.vn Ngày nhận bài: 06/02/2020
Ngày nhận bài sửa sau phản biện: 20/3/2020
Ngày chấp nhận đăng: 24/4/2020
38 Tạp chí KHOA HỌC & CÔNG NGHỆ ● Tập 56 - Số 2 (4/2020) Website: https://tapchikhcn.haui.edu.vn
P-ISSN 1859-3585 E-ISSN 2615-9619 SCIENCE - TECHNOLOGY 1. GIỚI THIỆU
dựa trên hệ thống suy luận mờ của Tagaki-Sugeno (ANFIS)
để nhận dạng trực tiếp hệ thống thủy lực có các thông số
Do hệ thống điện Việt Nam hiện nay đang ngày một
bất định. Trên cơ sở đó, các thông số của bộ điều chỉnh PID
phát triển, cả về số lượng và chất lượng, một vấn đề đặt ra
và PI sử dụng mạng nơ-ron tự động cập nhật theo sự thay
là khi các hệ thống nguồn điện phân tán tham gia vào phát
đổi của hệ thống trong các chế độ vận hành khác nhau của
điện sẽ dẫn đến sự mất cân đối và rất dễ mất ổn định của máy phát.
hệ thống. Tập đoàn Điện lực Việt Nam đã rất quan tâm và
đã yêu cầu các nhà máy là thành phần tham gia phát điện,
Theo [6], nghiên cứu ứng dụng các giải pháp đo lường
hòa lên lưới điện quốc gia phải giữ ổn định được hệ thống
và điều khiển hiện đại nhằm nâng cao chất lượng ổn định
của nhà máy và lưới. Trong nhà máy thủy điện, bộ điều tốc
tần số trong nhà máy thủy điện vừa và nhỏ, tác giả đề xuất
là khâu rất quan trọng, nó được ví như trái tim của con
giải pháp đo lường chiều cao cột nước; xây dựng mô hình
người, do vậy sự thay đổi tốc độ dẫn đến thay đổi tần số
nhận dạng tham số của tổ hợp tuabin - máy phát, ổn định
máy phát và tần số của lưới sẽ dẫn đến dao động. Hiện nay,
tốc độ quay của tuabin trên cơ sở PI, LQG, Backstepping.
do yêu cầu nâng cao chất lượng điện năng thì việc ổn định
Theo [7], nghiên cứu ổn định và tối ưu hệ thống phức
tần số tải là rất cần thiết và quan trọng để đảm bảo chất
hợp nhiều thành phần ứng dụng cho hệ thống điện. Đề
lượng điện năng cho phụ tải điện trong hệ thống. Nhiều
xuất giải pháp điều khiển lai sử dụng bộ điều khiển mờ PD
nghiên cứu về điều tốc tuabin thủy điện cũng đã được
kết hợp với các bộ lưu trữ năng lượng từ trường siêu dẫn để
công bố; như phát điện độc lập và ổn định tần số máy phát,
kiểm soát tần số lưới điện.
nhưng việc phát điện lên hệ thống nó sẽ ảnh hưởng rất lớn
Qua các nghiên cứu trong nước liên quan, vấn đề điều
từ các vùng phát điện liên kết với nhau, vấn đề càng trở lên
khiển ổn định tốc độ tuabin nhà máy thủy điện, đặc biệt là
phức tạp khi nhiều thành phần và yếu tố tác động dẫn đến
hệ thống đa liên kết vùng vẫn cần được tập trung nghiên
mất ổn định của hệ thống.
cứu để làm cơ sở cho việc xây dựng hệ thống ổn định cho
1.1. Nghiên cứu ở trong nước về điều khiển tốc độ
lưới điện lớn và phức tạp trước những yêu cầu về đa dạng
tuabin thủy điện để ổn định tần số tải
hóa nguồn năng lượng, nâng cao chất lượng điện năng và
Các tác giả Đoàn Quang Vinh, Đặng Trung Thi [2] đã
đảm bảo an ninh năng lượng cho quốc gia.
nghiên cứu bộ điều khiển PID có chỉnh định mờ áp dụng cho
1.2. Nghiên cứu ở ngoài nước về điều khiển tốc độ
hệ thống tuabin - máy phát vận hành với tải độc lập. Với
tuabin thủy điện để ổn định tần số tải
những ưu điểm của điều khiển mờ, phương pháp điều khiển
Hiện nay, trên thế giới có rất nhiều nghiên cứu về bộ
này đã khắc phục được hạn chế của điều khiển PID kinh điển
điều khiển cho bộ điều tốc tuabin - máy phát thủy điện. Các
đó là khả năng bền vững trước sự thay đổi của các tham số
công trình nghiên cứu này đều nhằm mục đích cải thiện và
của hệ thống trong quá trình mô hình hóa cũng như trong
nâng cao chất lượng điều khiển cho bộ điều tốc.
quá trình vận hành. Tuy nhiên, trong nghiên cứu này chỉ
Thuật toán điều khiển PD, PI, PID truyền thống vẫn
nghiên cứu với mô hình là tuyến tính hóa lân cận điểm làm
đang được các nhà khoa học quan tâm nghiên cứu tối ưu
việc với sự thay đổi nhỏ của phụ tải và chưa xét đến trường
hóa thông số của các bộ điều khiển.
hợp có nhiễu đầu vào là chiều cao cột áp.
Mô hình của tuabin thủy lực tuyến tính và phi tuyến
Nguyễn Hồng Quang [3] đã nghiên cứu thành công bộ
không có tháp điều áp được giới thiệu trong công trình
điều khiển nhúng áp dụng cho hệ điều tốc tuabin - máy
nghiên cứu của Gagan Singh và D.S. Chauhan [11]. Qua đó,
phát thủy điện có công suất vừa và nhỏ. Theo đó, nhóm
nhóm tác giả đã xác định mô hình tuyến tính hóa cho mỗi
thực hiện đề tài đã thiết kế, chế tạo bộ điều khiển PID số
thành phần của hệ thống thủy lực. Từ đó thiết kế bộ điều
đảm bảo hoạt động tin cậy và có độ chính xác cao trong
khiển PID số cho các mạch vòng điều khiển tần số và công
các trường hợp hệ thống có các thông số ổn định hoặc
suất của hệ thống. Ưu điểm của phương pháp này là đã tách biến động nhỏ.
mô hình toán của hệ thống thành các mô hình đơn giản để
Theo [5], tác giả đã trình bày một nghiên cứu ứng dụng
điều khiển đảm bảo được tính ổn định cao. Tuy nhiên, trong
mạng mờ và nơ-ron để xây dựng thuật toán điều khiển hệ
bài báo này các tác giả mới chỉ dừng lại ở mô hình tuyến tính
điều tốc tuabin - máy phát thủy điện. Ngoài ra, tác giả đã
hóa và phạm vi thay đổi công suất nhỏ (10%).
nghiên cứu sự ảnh hưởng của các thông số đến công suất và
Trên cơ sở đặc tính tốc độ của tuabin đồi, J. Fraile-
tần số của hệ thống trong các chế độ vận hành khác nhau,
Ardanuy, J. R. Wilhelmi, J. Fraile-Mora, J. I. Pérez và I.
thiết kế bộ điều khiển phản hồi tuyến tính PID, PI cho các
Sarasúa, đã sử dụng mạng nơron truyền thẳng nhiều lớp
mạch vòng điều khiển tốc độ và mạch vòng điều khiển công
ANN (Artificial Neural Netwok) có cấu trúc 2-5-1 (với đầu
suất. Đánh giá chất lượng điều khiển hệ thống khi sử dụng
vào là lưu lượng nước và góc mở cánh hướng, đầu ra là tốc
các bộ điều khiển PID và PI trong các trường hợp hệ thống
độ tối ưu) để học hàm nội suy tối ưu tốc độ từ đường cong
thủy điện có tham số đầu vào (chiều cao cột áp) và tham số
tốc độ của turbine này. Từ đó thiết kế bộ điều khiển tốc độ
đầu ra (công suất phụ tải) thay đổi trong phạm vi rộng.
hệ tuabin - máy phát thủy điện có công suất nhỏ vận hành
Thiết kế bộ điều khiển nơ-ron thích nghi NNC, trong đó
độc lập. Kết quả đạt được của công trình nghiên cứu này là
có sự kết hợp giữa mạng nơron và mạng nơron có cấu trúc
đáp ứng tốc độ ổn định nhanh về giá trị đặt chỉ sau vài giây.
Website: https://tapchikhcn.haui.edu.vn Vol. 56 - No. 2 (Apr 2020) ● Journal of SCIENCE & TECHNOLOGY 39 KHOA H Ọ C CÔNG NGHỆ P- ISS N 1859- 358 5 E- IS SN 261 5 - 961 9
Ilyas Eker và các cộng sự [20] trình bày bộ điều khiển
khiển tốc độ tuabin nước để ổn định tần số lưới điện khi
nhiều tầng đa biến, bộ điều khiển đã được các tác giả
phụ tải thay đổi cũng đồng thời yêu cầu ổn định công suất
chứng minh là tốt hơn so với các bộ điều khiển PI hay PID
trao đổi trên đường dây. Các bộ điều khiển tần số - phụ tải
thông thường. Tuy nhiên, bộ điều khiển này được thiết kế
được thiết kế để đảm bảo các mục đích này. Phần tiếp theo
với mô hình hệ thống thủy lực tuabin tuyến tính, hơn nữa
của bài báo sẽ đề cập đến các bộ điều khiển tần số - phụ tải
bộ điều khiển đa tầng thường phức tạp nên khó thực hiện như vậy.
trong thực tế. Orelind [9], giới thiệu bộ điều khiển kỹ thuật
số cho hệ thống thủy điện. Thông số tối ưu của bộ điều A1
khiển được tính từ các điểm vận hành khác nhau bằng cách
giảm thiểu hàm mục tiêu bậc hai. Sau đó, các hệ số của bộ
điều khiển được xác định dựa vào độ mở cánh hướng và giá P
trị sai lệch về tốc độ. A 2n 2 An
Dewi Jones và Sa’ad Mansoor [17] đề xuất bộ điều khiển
dự báo căn cứ vào sai lệch tần số và công suất cơ của
tuabin. Các tác giả đã chứng minh rằng điều khiển dự báo
đạt được sự cải thiện đáng kể trong việc điều khiển công Tie-line
suất của nhà máy thủy điện với các trường hợp hằng số A3 P3k Ak
thời gian khởi tạo của nước (T
w) trong đường ống áp lực
thay đổi và mô hình hệ thống tuabin thủy lực có dạng
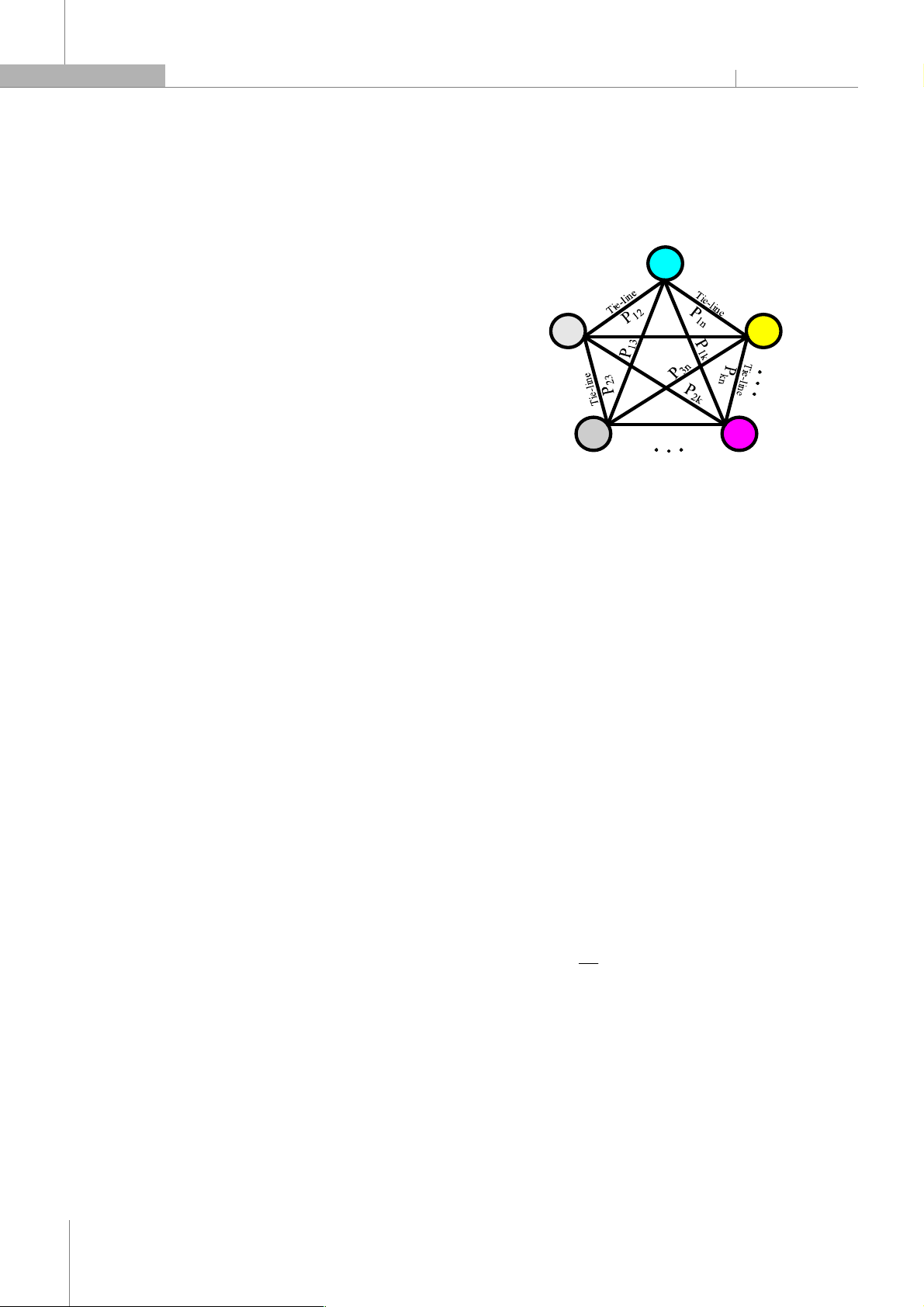
Hình 1. Hệ thống thủy điện đa liên kết gồm n vùng tuyến tính.
3. CẤU TRÚC ĐIỀU KHIỂN THÔNG MINH ỨNG DỤNG
Nghiên cứu của Clifton và các đồng nghiệp [16] đã trình
LOGIC MỜ VÀ MẠNG NƠ-RON
bày phương pháp mô hình hóa tối ưu bộ điều tốc, theo đó
3.1. Điều khiển logic mờ loại PI
các tác giả chỉ ra rằng có thể nâng cao hiệu suất của tuabin
Kiến trúc mờ loại PI (PI-type fuzzy logic) là một trong
thủy lực bằng cách sử dụng mô hình bộ điều tốc bậc cao.
những bộ điều khiển logic mờ phổ biến nhất có thể đạt
Nghiên cứu Lansberry JE, Wozniak L [12] đã sử dụng
được chất lượng điều khiển tốt. Mô hình cơ bản của chiến
thuật toán di truyền (GA) để tối ưu hóa bộ điều tốc tuabin
lược logic mờ loại PI áp dụng cho nhà máy điều khiển được
thủy lực. Thuật toán tự chỉnh thích nghi được xây dựng dựa
trình bày trong hình 4. Đầu ra của bộ điều khiển đã cho u(t)
trên sự thay đổi của hằng số thời gian Tw và phụ tải điện.
có liên quan đến tín hiệu điều khiển của nhà máy điều
Qua các tài liệu đã nghiên cứu của các tác giả trong và
khiển theo hệ số tỷ lệ Gu. Trong hầu hết các trường hợp,
ngoài nước có liên quan cho thấy các công trình nghiên
mỗi bộ điều khiển logic mờ là ánh xạ phi tuyến tính của
cứu này đều nhằm nâng cao chất lượng điều khiển bộ điều
đầu vào và đầu ra, do đó, nguyên tắc của kiến trúc logic mờ
tốc của tuabin thủy điện phát độc lập, ổn định tần số trong
như vậy được đưa ra như sau:
các nhà máy, lưới điện lớn và nhiều thành phần, chưa có t
nghiên cứu đầy đủ nào về điều khiển tốc độ tuabin để áp ( u t) u (τ)dτ n
dụng cho thủy điện liên kết vùng để ổn định tần số lưới. 0 (1)
Nhóm tác giả đề xuất các nghiên cứu tiếp theo dùng bộ t
điều khiển FLC loại PI kết hợp thuật toán PSO, GA là một
G .g G g e τ G g ce τ dτ u u . . ( ) . . ( ) e e ce ce
trong những chiến lược điều khiển nhằm nâng cao chất 0
lượng, mô hình ANN-NARMA kiểm soát tốt giải pháp điều
Trong đó, ge, gce và gu là các hệ số tỷ lệ bên trong cho
khiển thông minh nhằm kiểm soát tần số - phụ tải cho thủy
suy luận logic mờ. Trong khi đó, Ge, Gce và Gu là những hệ số điện liên kết.
tỷ lệ bên ngoài, có thể được điều chỉnh để thiết kế kiến trúc
2. MÔ HÌNH HỆ THỐNG THỦY ĐIỆN ĐA LIÊN KẾT VÙNG
logic mờ đang xét. Sử dụng toán tử Laplace trong miền tần
số, phương trình (1) có thể được biểu thị như sau:
Hệ thống thủy điện đa liên kết vùng như thể hiện trên
hình 1 thường bao gồm nhiều vùng, mỗi vùng là một cấu K ' ( U s) K ' i E(s) (2)
trúc phát điện hoàn thiện có ba thành phần chính: điều tốc, p s
tuabin nước và máy phát điện. Trong mô hình đơn giản của '
hệ thống điện liên kết gồm n vùng điều khiển trên hình 1, K G .g G .g Trong đó p u u e e .
mỗi vùng điều khiển được kết nối với nhau bằng một ' K G .g G .g i u u ce ce
đường dây truyền tải để trao đổi công suất. Do sự liên kết
giữa các vùng với nhau, khi tốc độ của mỗi máy phát thay
Hai hệ số trên, tương ứng với các hệ số tỷ lệ và tích phân
đổi, và do đó tần số đầu ra của vùng tương ứng cũng thay
của bộ điều chỉnh PI truyền thống. Tương tự như bộ điều
đổi, sẽ ảnh hưởng đến tần số lưới. Do mối quan hệ tỷ lệ
chỉnh PI, hai thông số này ảnh hưởng mạnh đến hiệu suất
giữa tần số lưới điện và công suất tác dụng trao đổi giữa
điều khiển của hệ thống điều khiển, và do đó chúng cần
các vùng, khi tần số lưới thay đổi do sự thay đổi của phụ tải
được chỉnh định thành công khi thiết kế bộ điều khiển mờ
sẽ dẫn đến sự thay đổi của công suất này. Bài toán điều
kiểu PI cho bài toán điều khiển đang xét.
40 Tạp chí KHOA HỌC & CÔNG NGHỆ ● Tập 56 - Số 2 (4/2020) Website: https://tapchikhcn.haui.edu.vn
P-ISSN 1859-3585 E-ISSN 2615-9619 SCIENCE - TECHNOLOGY PI-type Fuzzy
4. ĐỀ XUẤT CHIẾN LƯỢC ĐIỀU KHIỂN TỐC ĐỘ TUABIN Knowledge logic controller base
HỆ THỐNG THỦY ĐIỆN LIÊN KẾT VÙNG Fuzzification Defuzzification
4.1. Điều khiển tốc độ tuabin hệ thống thủy điện hai E(t) interface interface ( e t) G
vùng liên kết ứng dụng logic mờ e Decision- un(t) u(t) d making Gu G
Xét mô hình hệ thống thủy điện liên kết hai vùng điều ce logic dt U(t) ce(t) CE(t)
khiển (trích từ mô hình đã vẽ ở hình 1 khi n = 2). Mô hình
này sử dụng các kiến trúc điều khiển mờ kiểu PI đã trình
bày ở phần trên. Mỗi vùng điều khiển sử dụng một bộ điều r(t) e(t) Fuzzy logic u(t) Control y(t) _
khiển mờ, tín hiệu điều khiển đầu ra của khâu mờ này được controller plant Setpoint
đưa đến bộ điều tốc để điều khiển góc mở cánh hướng của ym(t)
tuabin thủy lực tương ứng, qua đó ổn định tốc độ máy phát Sensor & [14, 15]. transmitter CONTROL-AREA 1 FLC 1 ∆P
Hình 2. Bộ điều khiển logic mờ loại PI L1 ACE1(t) ∆f1
Để thiết kế một FLC dựa trên PI hiệu quả, nghiên cứu Governor Turbine Generator
này đề xuất một phương pháp kiểm soát mới áp dụng
thuật toán PSO để điều chỉnh các hệ số chỉnh định của bộ điều khiển mờ. Compute ∆Ptie12
3.2. Bộ điều khiển tần số dựa trên ANN-NARMA
Trong những năm gần đây, các kỹ thuật ứng dụng ACE2(t)
mạng nơ-ron đã trở thành các giải pháp điều khiển hữu ích Governor Turbine Generator ∆f2
bên cạnh phương pháp ứng dụng logic mờ để thay thế các ∆PL2
bộ điều khiển cổ điển, đặc biệt nó hiệu quả hơn trong các FLC 2 CONTROL-AREA 2
hệ thống điều khiển phức tạp. Mạng nơ-ron có chức năng
Hình 4. Bộ điều khiển logic mờ liên kết 2 nhà máy
thông minh của bộ não con người để giải quyết các vấn đề
Với mỗi bộ điều khiển mờ loại PI đã đề xuất theo cấu
điều khiển đòi hỏi các tiêu chí kỹ thuật có chất lượng cao.
trúc đã trình bày ở phần 3 của bài báo này, các hàm thuộc
Do mạng nơ-ron có cấu trúc tự nhiên song song tương tự
loại Gaussian được sử dụng cho cả hai đầu vào và một đầu
như mạng lưới thần kinh của con người, nó có thể hoạt
ra. Bảy mức độ logic, bao gồm NB (Âm lớn), NM (âm trung
động trong thời gian thực nhanh hơn và hiệu quả hơn các
bình), NS (âm nhỏ), ZE (không), PS (dương nhỏ), PM (dương
phương pháp điều khiển thông thường. Ngoài ra, do khả
năng huấn luyện ngoại tuyến, ANN đa lớp có thể giảm thời
trung bình), PB (dương lớn), được sử dụng cho từng hàm
gian tính toán để thiết kế các mô hình gần đúng để thiết kế
thuộc của đầu vào và đầu ra của bộ điều khiển logic mờ
các chiến lược điều khiển tần số. Do đó, kỹ thuật điều khiển
loại PI được đề xuất. Bảng 1 đưa ra ma trận quy tắc được sử
dựa trên mạng nơ-ron cũng có thể được áp dụng hiệu quả
dụng cho các bộ điều khiển logic mờ loại PI được đề xuất theo mô hình Mamdani.
để thiết kế một bộ điều khiển tần số cho hệ thống thủy
điện liên kết vùng trong [19].
Bảng 1. Ma trận quy tắc điển hình được đề xuất cho bộ điều khiển logic mờ loại PI [1]
de(t)
e(t) NB NM NS ZE PS PM PB NB PB PB PB PM PM PS ZE NM PB PM PM PM PS ZE NS NS PB PM PS PS ZE NS NM ZE PM PM PS ZE NS NM NM PS PM PS ZE NS NS NM NB PM PS ZE NS NM NM NM NB PB ZE NS NM NM NB NB NB
Ở đây, thuật toán PSO được sử dụng để tối ưu hóa ba hệ
số là Ge, Gce và Gu, bằng cách nhân từng hệ số này với các hệ
số cập nhật tương ứng ke, kce và ku. Ba hệ số cập nhật được sử
dụng để tạo ra ba hệ số chỉnh định mới. Từ đó, bộ điều khiển
Hình 3. Kiến trúc của bộ điều khiển ANN-NARMA
mờ loại PI có thể đạt được kết quả điều khiển mong muốn
Website: https://tapchikhcn.haui.edu.vn Vol. 56 - No. 2 (Apr 2020) ● Journal of SCIENCE & TECHNOLOGY 41 KHOA H Ọ C CÔNG NGHỆ P- ISS N 1859- 358 5 E- IS SN 261 5 - 961 9
khi các hệ số chỉnh định này đã được tối ưu hóa thông qua
tương ứng trong vùng đó. Bộ điều khiển NARMA sẽ sử
cơ chế tối ưu hóa bầy đàn PSO. Hình 5 mô tả sơ đồ khối
dụng tín hiệu phản hồi của đối tượng điều khiển (như đã
nguyên lý của cấu trúc điều khiển lai ứng dụng logic mờ kiểu
thảo luận trong mục 3 của bài báo) chính là tín hiệu sai lệch
PI kết hợp với giải thuật tối ưu hóa bầy đàn PSO cho bài toán
vùng ACE. Do nguyên lý làm việc dựa trên việc tuyến tính
ổn định tốc độ tuabin cho mỗi vùng điều khiển.
hóa đối tượng điều khiển (thông qua các hàm f và g trong
cấu trúc của mô hình NARMA trên hình 3) để tính ra tín hiệu
Knowledge PI-type fuzzy logic control er
điều khiển u(t) nên kiến trúc điều khiển ứng dụng bộ ANN- base
NARMA đề xuất ở đây có thể mang lại kết quả điều khiển e(t) E(t) n rất khả thi. Ge n U U(t) tio atio N(t) Decision- u(t) 5. KẾT LUẬN ke Gu making
Bài báo này trình bày tổng quan các kết quả nghiên cứu ce(t) zzific CE(t) zzifica u du N(t) logic u fu
đã có của các tác giả trong và ngoài nước về điều khiển tốc Gce F e k dt D u
độ tuabin thủy điện để ổn định tần số tải trong một nhà
máy thủy điện. Từ đó, bài báo đã phân tích những nghiên kce
cứu đã đạt được, những đóng góp cho khoa học về chuyên l
môn những mặt còn hạn chế cần được nghiên cứu để hoàn a n PSO algorithm
thiện hơn. Xuất phát từ những hạn chế của các nghiên cứu l sig
đã có, bài báo đồng thời cũng đề xuất các giải pháp điều Fitness function tro n
khiển thông minh cho bài toán ổn định tốc độ tuabin thủy o evaluation r(t) C
điện cho hệ thống điện đa liên kết vùng. Hai sơ đồ điều Setpoint _
khiển khả thi ứng dụng cấu trúc logic mờ kiểu PI lai với giải
thuật tối ưu hóa bầy đàn PSO và bộ điều khiển ANN- y(t)
NARMA đã được đề xuất trong bài báo. Công việc tiếp theo Plant
từ bài báo tổng quan này, các tác giả sẽ triển khai mô hình
hóa hệ thống thủy điện đa liên kết vùng, đồng thời thực
Hình 5. FLC loại PI dựa trên PSO được đề xuất
hiện các mô phỏng số để đánh giá chi tiết hiệu quả của các
4.2. Điều khiển tốc độ tuabin hệ thống thủy điện hai
chiến lược điều khiển đã đề xuất.
vùng liên kết ứng dụng mạng nơ-ron theo kiến trúc LỜI CẢM ƠN NARMA
Nghiên cứu này được tài trợ bởi Công ty cổ phần tư vấn NARMA 1 CONTROL-AREA 1 ∆PL1
công nghệ cao Duy Hoàng theo hợp đồng số 10/DH- TQTĐ ACE1(t) Hydro ∆f1 năm 2018. Governor Generator turbine Compute ∆P
TÀI LIỆU THAM KHẢO tie12
[1]. Nguyễn Như Hiển, Lại Khắc Lãi, 2007. Điều khiển mờ và nơron. NXB ACE2(t) Hydro Governor Generator khoa học kỹ thuật. turbine ∆f2
[2]. Nguyễn Trung Thi, Đoàn Quang Vinh, 2010. Chỉnh định mờ tham số PID ∆PL2 NARMA 2 CONTROL-AREA 2
cho bộ điều tốc turbine nhà máy thủy điện. Tạp chí Khoa học và Công nghệ, Đại
học Đà Nẵng - số 4(39), 324-331.
Hình 6. Hệ thống thủy điện liên kết hai vùng ứng dụng các bộ điều khiển
ANN-NARMA để ổn định tốc độ tuabin
[3]. Nguyễn Hồng Quang, 2013. Nghiên cứu thiết kế chế tạo thiết bị điều khiển
nhúng ứng dụng cho các trạm thủy điện. Đề tài độc lập cấp Nhà nước mã số
Một trong những ứng dụng quan trọng nhất của kỹ 43/2009G/HĐ-ĐTĐL.
thuật mạng nơ-ron là thiết kế bộ điều khiển cho nhiều hệ
[4]. Nguyễn Chí Ngôn, Đặng Tín, 2011. Điều khiển PID một nơron thích nghi
thống điều khiển bao gồm các yếu tố phi tuyến và bất
dựa trên bộ nhận dạng mạng nơron mờ hồi qui áp dụng cho hệ thanh và bóng. Tạp
định. Bộ điều khiển NARMA ứng dụng mạng nơ-ron như đã
chí Khoa học Trường Đại học Cần Thơ 2011:20a, 159-168.
đề cập đến ở phần trước hoàn toàn có thể sử dụng để thiết
kế các bộ điều khiển tần số - phụ tải cho hệ thống thủy
[5]. Nguyễn Đắc Nam, 2017. Nghiên cứu ứng dụng mạng mờ nơ-ron để xây
điện đa liên kết vùng. Hình 6 mô tả kiến trúc điều khiển tốc
dựng thuật toán điều khiển hệ điều tốc tuabin - máy phát thủy điện. Luận án
độ tuabin thủy lực cho một hệ thống điện liên kết hai vùng tiến sĩ.
sử dụng các bộ điều khiển ANN-NARMA. Tương tự như cấu
[6]. Đặng Tiến Trung, 2019. Nghiên cứu ứng dụng các giải pháp đo lường và
trúc điều khiển sử dụng các bộ điều khiển logic mờ kiểu PI
điều khiển hiện đại nhằm nâng cao chất lượng ổn định tần số trong nhà máy thủy
như đã trình bày ở trên, trong kiến trúc điều khiển ứng
điện vừa và nhỏ. Luận án tiến sĩ.
dụng mạng nơ-ron này, mỗi vùng điều khiển sẽ sử dụng
[7]. Vũ Duy Thuận, 2018. Nghiên cứu ổn định và tối ưu hệ thống phức hợp
một bộ điều khiển NARMA để ổn định tốc độ của tuabin
nhiều thành phần ứng dụng cho hệ thống điện. Luận án tiến sĩ.
42 Tạp chí KHOA HỌC & CÔNG NGHỆ ● Tập 56 - Số 2 (4/2020) Website: https://tapchikhcn.haui.edu.vn
P-ISSN 1859-3585 E-ISSN 2615-9619 SCIENCE - TECHNOLOGY
[8]. Iwan Setiawan, Ardyono Priyadi, Mauridhi Hery Purnomo, 2013.
Controlling of Non-Minimum Phase Micro Hydro Power Plant B ased on Adaptive B
- Spline Neural Networld. IEEE 978-1-4799-0425-9/13.
[9]. Orelind, Wozniak, et al., 1989. G.Orelind, L.Wozniak, J.Medanic,
T.Whittemore, Optimal PID Gain Schedule for Hydrogenerators-Design and
Application. IEEE Trans. on Energy Conversion, Vol. 4, No. 3, pp. 300-307.
[10]. Gagan Singh and D.S. Chauhan, 2011. Development and Simulation of
Mathematical Modelling of Hydraulic Turbine. ACEEE Int. J. on Control System and
Instrumentation, Vol. 02, No. 02, pp. 55-58.
[11]. Dorf and Bishop, 2005. Modern Control Systems. ISBN-13: 978-0-13- 602458-3.
[12]. Lansberry JE, Wozniak L., 1992. Optimal hydro generator governor
tuning with a genetic algorithm. IEEE Trans Energy Conv 1992;7:623–630.
[14]. ProyectoCICYT TAP97-0969-C03-01, Internal Report, February 1998.
[14]. Chen Jian, Liang Gui-shu, Dong Qing, 2008. Design of Additional Mix
Robust Governor Control for Hydraulic Turbine Generator. DRPT, -9 April 2008 Nanjing China.
[15]. Cheng Y-C, Ye Lu-Q, Chuang Fu, Cai W-Y., 2002. Anthropormorphic
intelligent PID control and its application in the hydro turbine governor. In: 1st
International Conference on Machine Learning and Cybernetics, vol.1, pp. 391– 395.
[16]. Clifton L., 1988. Optimal governing of reaction turbines. Water Power Dam Const, 22–28.
[17]. Dewi Jones and Sa’ad Mansoor, 2004. Predictive Feedforward Control
for a Hydroelectric Plan. IEEE transactions on control systems technology, vol. 12, no. 6.
[18]. Dhaliwal NS, Wichert HE, 1978. Analysis of PID governors in
multimachine system. IEEE Trans Power ApparSyst 1978;97:456–463.
[19]. Kumpati SN, Snehasis M., 1997. Adaptive control using neural networks
and approximate models. IEEE Transactions on neural networks 8:475-485.
[20]. İlyas Eker, et al., 2003 Robust governor design for hydro turbines using a
multivariable- cascade control approach. The Arabian Journal for Science and
Engineering, Volume 28, Number 2B, pp 195-209. AUTHORS INFORMATION
Nguyen Duy Trung1, Le Hung Lan2, Nguyen Van Tiem2,
Nguyen Ngọc Khoat1, Dao Thi Mai Phuong3, Hoang Thi Thu Huong4
1Faculty of Control and Automation, Electric Power University
2Department of Cybernetics, University of Transport and Communication
3Faculty of Electrical Engineering, Hanoi Unviversity of Industry
4Power Project Management Board 2, Vietnam Electricity Corporation
Website: https://tapchikhcn.haui.edu.vn Vol. 56 - No. 2 (Apr 2020) ● Journal of SCIENCE & TECHNOLOGY 43
Tài liệu liên quan:
-

Hướng dẫn đăng nhập Hệ thống CMS - Kỹ thuật Công nghệ
425 213 -

Tổng hợp 57 Câu hỏi trắc nghiệm có đáp án môn Nhập môn Internet và Elearning - Kỹ thuật Công nghệ
1.1 K 574 -
Nghiên cứu đặc điểm di truyền phân loài chim Yến tại Việt Nam | Tạp chí Nông nghiệp và phát triển nông thôn kỳ 2 - 2014
764 382 -

Ứng dụng kỹ thuật metagenomics để nhận diện gen mã hóa laccase của nấm Basidiomycetes trong mẫu đất rừng
249 125