Bài giảng Chương 12 - Điều khiển tự động các hệ thống truyền động điện môn Truyền động điện tự động | Trường Đại học Bách Khoa Hà Nội
Tổng hợp hệ thống đ.khiển TĐĐ nhằm đạt được tối ưu tĩnh, nghĩa là hệ thống đảm bảo các biến trạng thái, hoặc tham số của hệ thống có giá trị nhất định ở trạng thái tĩnh. Tài liệu được sưu tầm gồm 16 trang, giúp các bạn nắm vững kiến thức, rèn luyện kỹ năng và đạt được kết quả tốt trong học tập. Mời các bạn đón xem!
Môn: Truyền động điện tự động 26 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5 K tài liệu
Tác giả:
Preview text:
1.13. Tổng hợp hệ thống TĐĐ ở chế độ tĩnh.
Tổng hợp hệ thống đ.khiển TĐĐ nhằm đạt được:
- tối ưu tĩnh, nghĩa là hệ thống đảm bảo các biến trạng thái, hoặc
tham sốcủa hệ thống có giá trị nhất định ở trạng thái tĩnh.
Chất lượng của các hệ thống ở trạng thái tĩnh được đặc trưng bởi :
- Mô đun của các đại lượng điện từ: s, r, is, ir hoặc us, ur,
- Tổn hao điện năng : Pw
- Công suất tác dụng lấy từ lưới điện P1
- Công suất phản kháng lấy từ lưới Q1
- Công suất biểu kiến S1
-Tổn hao công suất ở rô to Pr
- Công suất cơ trên trục động cơ Pm hay Pcơ -Hiệu suất động cơ - Hệ số công suất cos
- Hệ số quá tải mô men
- Hiệu số giữa giá trị cho trước của một thông số bất kỳ đặc trưng
trạngthái của động cơ và giá trị thực tế.
Tối ưu tĩnh phụ thuộc vào:
-thiết kế những khâu nhất định
- chọn cấu trúc các bộ điều chỉnh,
Biểu thức tổng quát của mô men điện từ động cơ xoay chiều như sau: ms = kF(X)=k X1 X2 sign(X1 X2) (1.95)
trong đó X1, X2 – biến trạng thái .
Mô men này là hàm không đồng nhất của 2 véc tơ, trong trường hợp tổng
quát chúng là các biến trạng thái.
Sự không đồng nhất do mô men phụ thuộc gián tiếp vào tốc độ và véc tơ điện áp.
Do đó bằng những tổ hợp khác nhau của các biến này có thể sẽ tạo ra được
cùng một giá trị mô men.
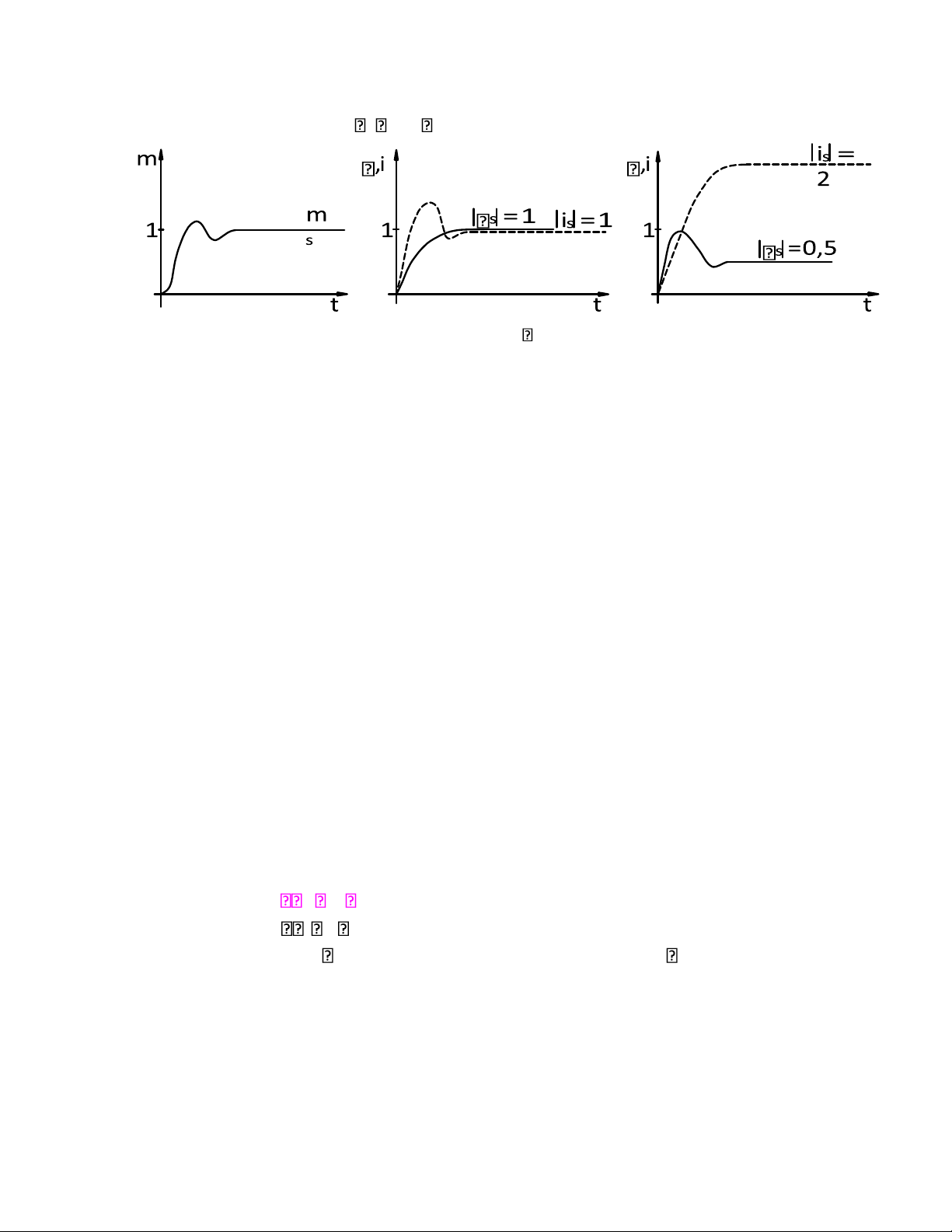
Ví dụ: chọn biến s và is. Trên h.1.24a là đặc tính thời gian của mô men
Ta có 2 khả năng thay đổi s và is để nhận được đặc tính mô men này. Cụ thể: s =1 và is = 1,
s =0,5 , is =2 (ta vẫn có m=1).
Có thể nói tổng quát là: số lượng các tập hợp 2 biến trạng thái sẽ bằng số các tập
biến trạng thái, ví dụ cho động cơ dị bộ lồng sóc, số lượng các tập hợp 2 biến trạng
thái trong 6 biến trạng thái (is, ir,iM , s, r, M) có dạng:
ms -{is, ir),,( s, r)...( m,iM)} (1.96)
H. 1.24: Biểu diễn 2 cách khác nhau thay đổi s và is để nhận được mômen cho trước
Từ phương trình chuyển động của động cơ, rút ra kết luận:
-dạng mô men trên trục động cơ có ảnh hưởng trực tiếp đến dạng đặc tính tốc độ,
-có rất nhiều phương pháp điều chỉnh tốc độ động cơ điện dòng xoay chiều.
phụ thuộc vào sự lựa chọn tín hiệu vào tác động lên đặc tính mô men cho trước tức là đặc tính tốc độ.
1.14 .Những yêu cầu cơ bản để tổng hợp tĩnh hệ thống TĐĐ. Các yêu cầu:
-Yêu cầu đầu tiên là phải đảm bảo quá tải về mô men, khi biên độ dòng điện
stato và rô to không được vượt quá gía trị cho trước, tức là phải thực hiện điều chỉnh
ở góc phần tư thứ nhất.
-Khi phải giới hạn giá trị dòng điện và điện áp ở trạng thái tĩnh cũng như
trạng thái động mà vẫn đảm bảo độ quá tải của mô men, thì khi ổn định phải giữ từ
thông stato không đổi ở giá trị định mức .
(Không đảm bảo được điều kiện này, mạch từ sẽ bão hòa, khi từ thông lớn
hơn định mức hoặc mô men giảm khi từ thông nhỏ hơn giá trị định mức). Trong cả
2 trường hợp đều gây ra những tổn hao phụ làm cho điều khiển không kinh tế.
-Để thực hiện điều chỉnh ở góc 1/4 thứ nhất là phải thực hiện tối thiểu hóa biểu thức: I1 = - đm (1.97)
Trong đó - đm - hiệu trạng thái véc tơ từ thông móc vòng, tức là hiệu véc
tơ từ thông móc vòng của máy và véc tơ từ thông định mức đm.
Khi yêu cầu sử dụng tối đa động cơ làm việc ở tốc độ vượt tốc độ định mức
để giữ cho công suất trên trục động cơ không đổi, phải giảm một cách thích hợp biên
độ từ thông, tức là điều chỉnh ở vùng II.
-Yêu cầu cơ bản đối với hệ thống điều khiển là giới hạn sđđ của động cơ, ở
đại lượng tương đối yêu cầu này biểu diễn: es 1 (1.98)
Khi không thỏa mãn điều kiện (1.98) có thể xuất hiện sự nguy hiểm cho độ
bền chất cách điện của máy điện.
Các hệ thống có điều chỉnh tốc độ trơn từ ze ro tới tốc độ có giá trị trên tốc
độ định mức gọi là hệ thống có 2 vùng điều chỉnh
-Đảm bảo hê jthống tiêu thụ năng lượng cảm kháng ít nhất tức là: I2 = sis = min (1.99)
Để I2=min nếu sử dụng động cơ điện đồng bộ, phải điều chỉnh kích từ để
cos =1, còn nếu là động cơ dị bộ, thì tối thiểu hóa I2 đồng nghĩa với điều khiển giữ cho r = const.
-Với động cơ dị bộ làm việc trên đoạn tuyến tính của đặc tính cơ thì phải thỏa mãn (h.1.25): scơ sẽ bị dừng.
Ở chế độ ổn định giá trị độ trượt sđịnh mức, tổn hao trong động cơ sẽ tăng vì Pr = ms s (1.101)
(m-mô men, s-tần số góc của dòng stato), vì vậy mỗi hệ thống điều chỉnh tốc độ cần
-Thỏa mãn điều kiện giới hạn về độ trượt ở chế độ ổn định như sau: 1 s sk (1.102)
Trong đó - hệ số qúa tải.
Thực tế không phải tất cả các hệ thống đã sử dụng đều thỏa mãn các yêu
cầu trên về tối ưu tĩnh vì tính kinh tế, kỹ thuật nên người ta sử dụng hệ thống đơn
giản hơn có chỉ số chất lượng kém hơn nhưng kinh tế hơn.
1-15. Tổng hợp các mạch vòng điều chính dùng hàm chuẩn tối ưu[2] 1. Đặt vấn đề
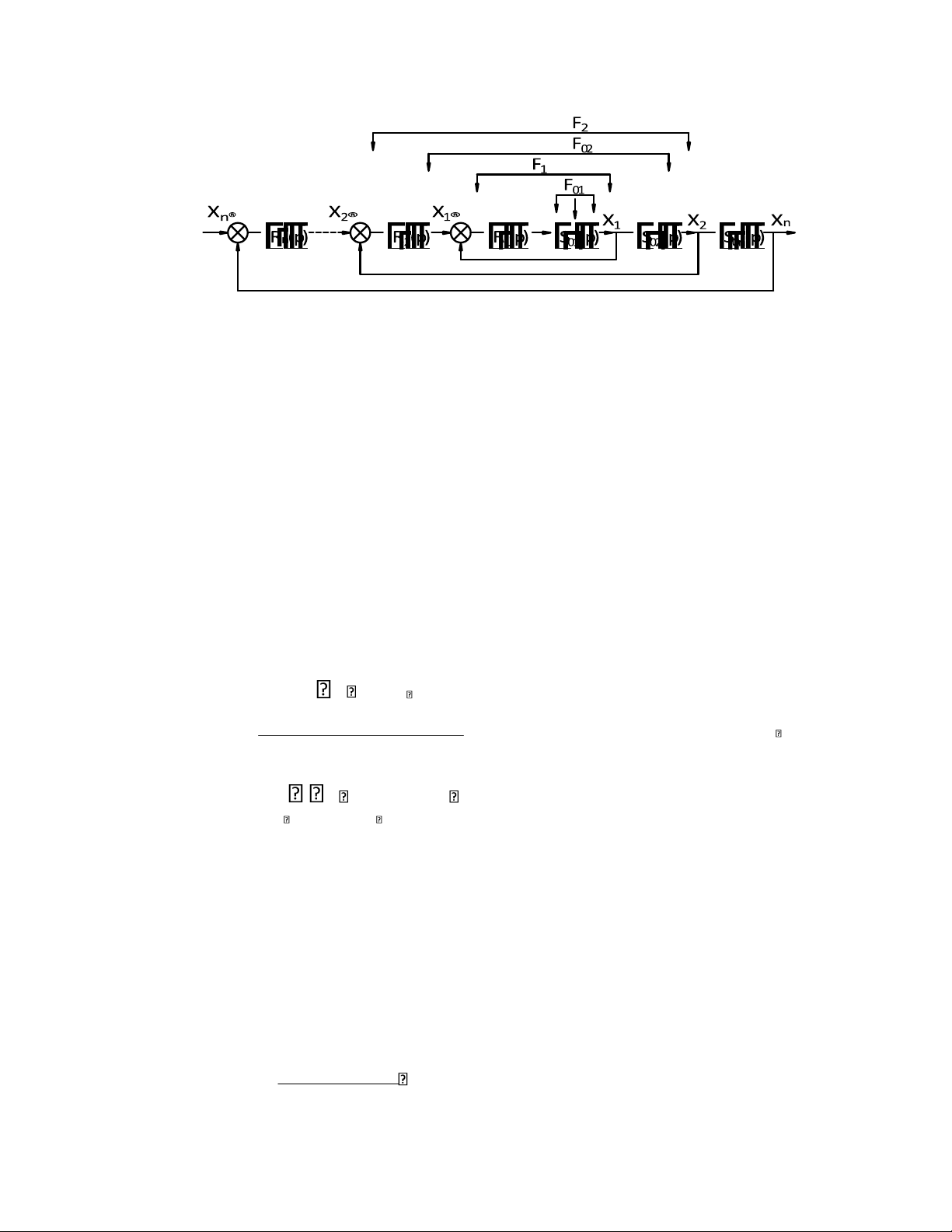
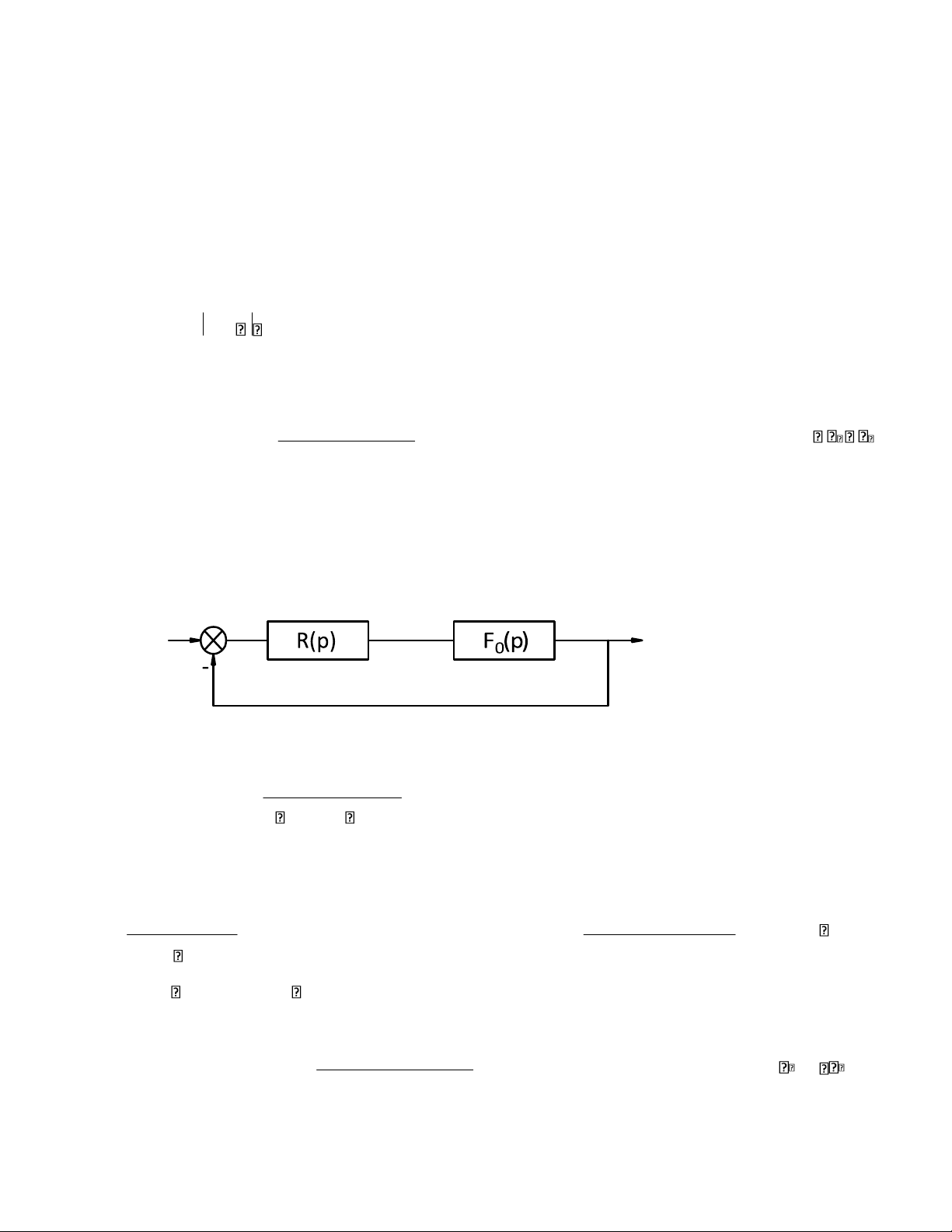
-Khi tổng hợp các hệ TĐ nhiều thông số thường phân hệ thành cấu trúc nhiều
vòng có các bộ điều chỉnh (regulator) nối theo cấp như hình l.26 . H.1.26
Trong đó có n thông số X, n bộ điều chỉnh R(p) của n đối tượng (hệ thống)
S(p) trên đó tác động n nhiễu chính p1...pn .
Từ sơ đồ thấy rằng tín hiệu ra của bộ điều chỉnh chính là tín hiệu điều khiển
của mạch vòng điều chỉnh cấp i - 1.
Các đại lượng (thông số) điều chỉnh x1, ..., xn tương ứng với giá trị ta đặt x1đ
...x1đn. Số lượng bộ điều chỉnh đúng bằng số các đại lượng điều chỉnh.
Để trình bày phương pháp, giả thiết rằng mạch điều chỉnh của mỗi đại lượng
có chứa một số phần tử có hằng số thời gian lớn, thí dụ điện cơ, điện từ của cuộn
dây dây kích từ v.v.. và một phần chứa các hằng số thời gian nhỏ, thí dụ hằng số
thời gian của các xen xơ; của mạch điều khiển ti-ri-sto v.v. . . hàm truyền của đối tượng có dạng: m
K (1 T p ej) T p d S0(p)= tv j 1 tuv (1.103) p (1 T pk ) (1 T p' s ) j 1 s 1
Trong đó Ta là hằng thời gian của khâu trễ.Việc tổng hợp các bộ điều chỉnh
sẽ được tiến hành sao cho bù được các khâu có hằng số thời gian tương đối lớn Tk ,
các khâu có hằng số thời gian tương đối nhỏ Ts sẽ không được bù.
Trong kỹ thuật truyền động điện có thể bỏ qua các hằng sổ thời gian < 1ms, các hằng số
thời gian < hàng trục ms có thể coi là nhỏ (Ts) còn hằng số thời gian > 0,1s coi là lớn (Tk).
Mỗi mạch vòng điều chính có một bộ điều chỉnh và hệ thống được điều chỉnh
bao gồm đối tượng điều chỉnh S0 và mạch vòng phụ, thí dụ: R p S p1 ( ) 01 ( ) F1(p)=1 R p S p1 ( ) 01 ( ) F02(p)=S02(p)F1(p) F0i(p)=S0i(p)Fi-1(p)
Việc tổng hợp các bộ điều chỉnh được thực hiện trong từng mạch vòng.và sử
dụng các phương pháp hàm chuẩn tối ưu đế tổng hợp thông số các bộ điều chỉnh cho các mạch vòng.
1.15.1. Sử dụng tiêu chuẩn mô đun tối ưu Theo tiêu chuẩn tối ưu F j( ) 1 (1.104)
Hàm chuẩn theo tiêu chuẩn mô đun tối ưu có dạng: 1 FMC(p)=1 2 p 2 2 p 2 (1.105)
Chú ý: Tiêu chuẩn mô đun tối ưu hiệu chỉnh đặc tính tần sổ chỉ ở vùng tần
số thấp và trung bình không bảo đảm trước được tính ổn định của hệ thống. Nên khi
ứng dụng tiêu chuẩn này phải kiểm tra sự ổn định của hệ.
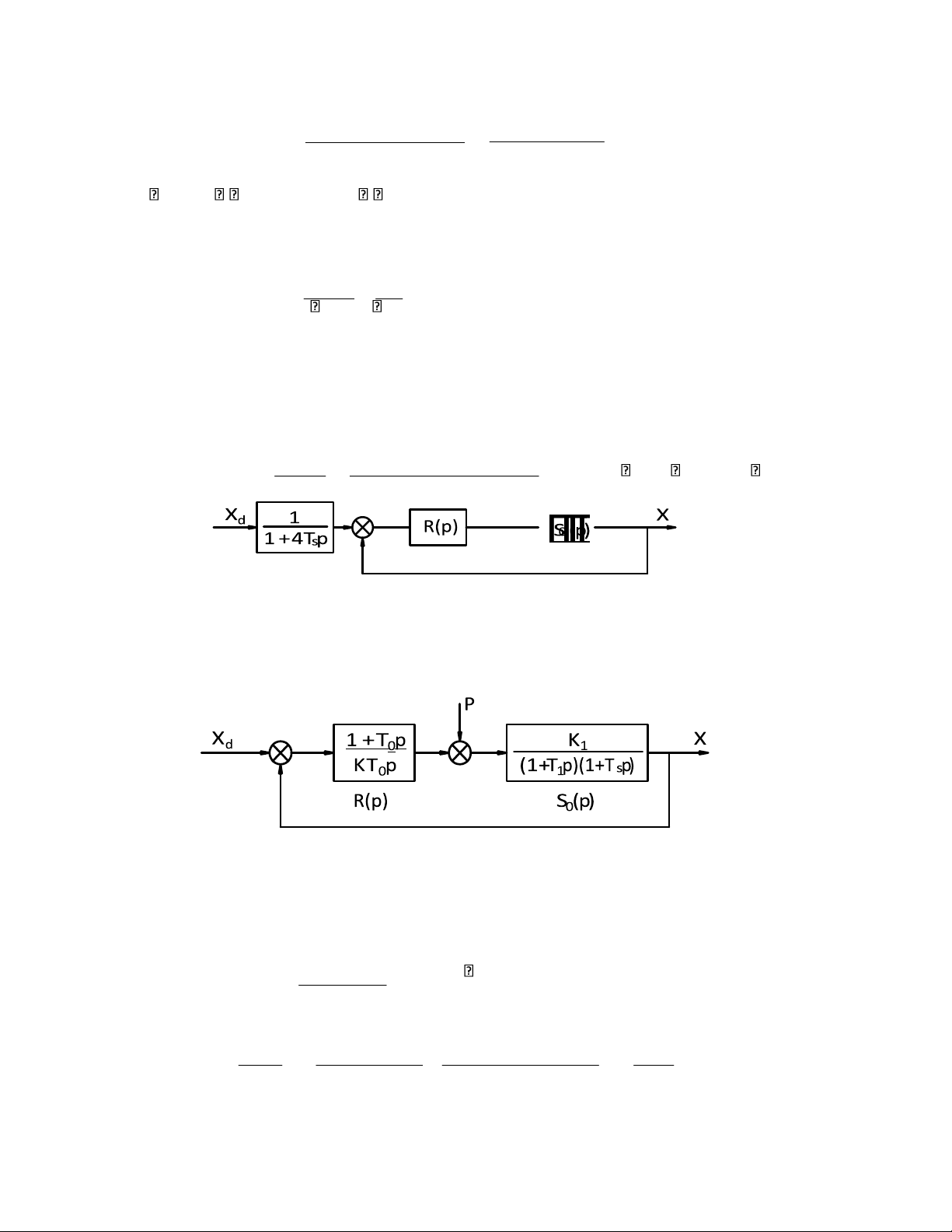
a) Trường hợp hệ hữu sai có hàm truyền : Xét
một hệ thống có cấu trúc như hình 1.27 Xd X
H. 1.27: Cấu trúc hệ thống điều khiển K1 F0(p)= (1.106)
(1 T p1 )((1 T p2 ) Trong đó T2>T1
Để hệ kín có hàm truyền F(p)=FMC(p) thì
R p F p( ) 0 ( )FMC ( )p , Từ đây ta có R(p)=
F p F0 ( )[F MCMC(
)p( )p 1] thay vào ta được: 1 R p F p( ) 0 ( ) 1 R(p)= F p0 ( )2 p(1 p) (1.106a) 1 Tp
Nếu chọn PI có hàm truyền R(p)=
KT p0 thì chỉ cần bù được thời gian lớn
1+Tp=1+T1p. Hàm truyền hệ hở bây giờ có dạng: 1 K1
F0(p)=R(p)S0(p)= KT p0 .1 Tp1 Hàm truyền mạch kín: K1 1
F(p)= KT p0 (1 Tp1 ) K1
1 KT0 p KTT0 1 p2 K1 K1 Để F(p)=FMC(p) thì: KT0=2T1K1 1 F(p)=1 2Tp1 2T p12 2
Có nghĩa là hệ có cấu trúc như (1.106a) theo tiêu chuẩn mô đun thì bộ điều chỉnh PI có hàm truyền: 1 T p2 R(p)= 2KTp1 1
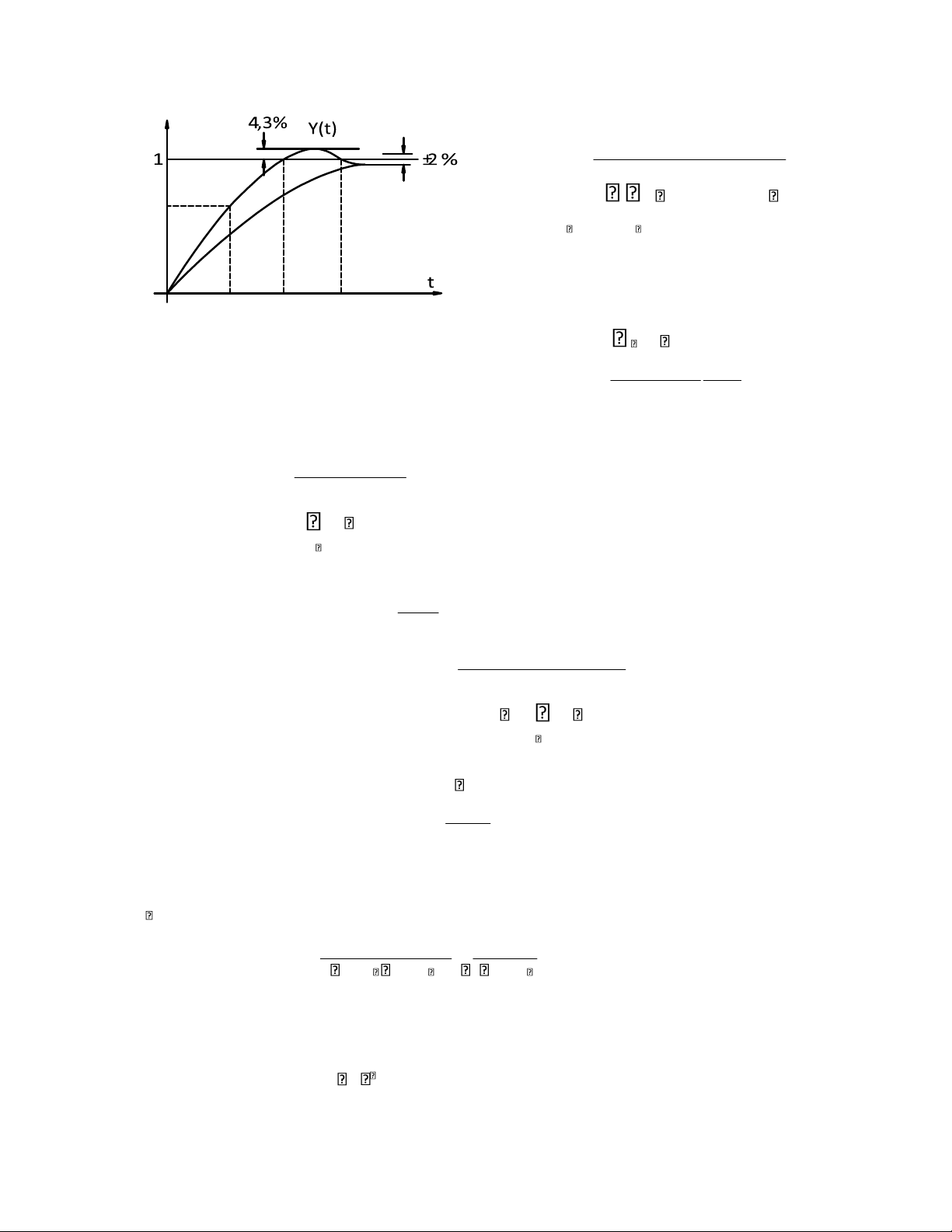
Quá trình quá độ có dạng như hình 1.28.
b)Trường hợp có hàm truyền K
F0(p)= u (1 T p's ) s 1
Trong đó T’s là tổng các hằng số thời gian nhỏ, theo cách tính ở trên ta tìm
được bộ điều chỉnh loại tích phân: 1 R(p)=
2KT ps; Trong đó:Ts= T’s
c)Nếu hàm truyền có dạng: K 2 u (p)= 0,63 F0 (1 T pk ) (1 T p's ) k 1
k 1 tức là tích của 2 hàm
truyền trên, bộ điều chỉnh là PID có hàm truyền dạng: 2 0 2T1 4,7T1 8,4T1
R(p)= k 1 (1 T pk ) 1
H. 1.28: Đặc tính quá độ của hệ thống K 2T ps K d)
Nếu F0(p)= p u (1 T p's ) thì bộ điều chỉnh tỷ lệ: s 1 1 R(p)= 2KTs K e)
Nếu hàm truyền có dạng: F0(p)= p(1 Tp) u (1 T p's ) thì bộ điều chỉnh PD có s 1 dạng: 1 Tp R(p)= 2KTs
Nhự vậy là tùy vào hàm F0(p) của hệ hở (đối tượng) với các bộ đỉều chỉnh R(p) tổng
hợp được hệ có hàm truyền dạng (1.106). Trong các trường hợp trên, giá trị hằng số
T nhỏ, nên có thế coi hàm truyền kết quả là hàm truyền dạng quán tính: 1 1
F(p)=1 1T p 2T p 2 2 1 2T p và đặc tính quá độ trên hình 1.28
1.15.2. Áp dụng tiêu chuẩn đối xứng
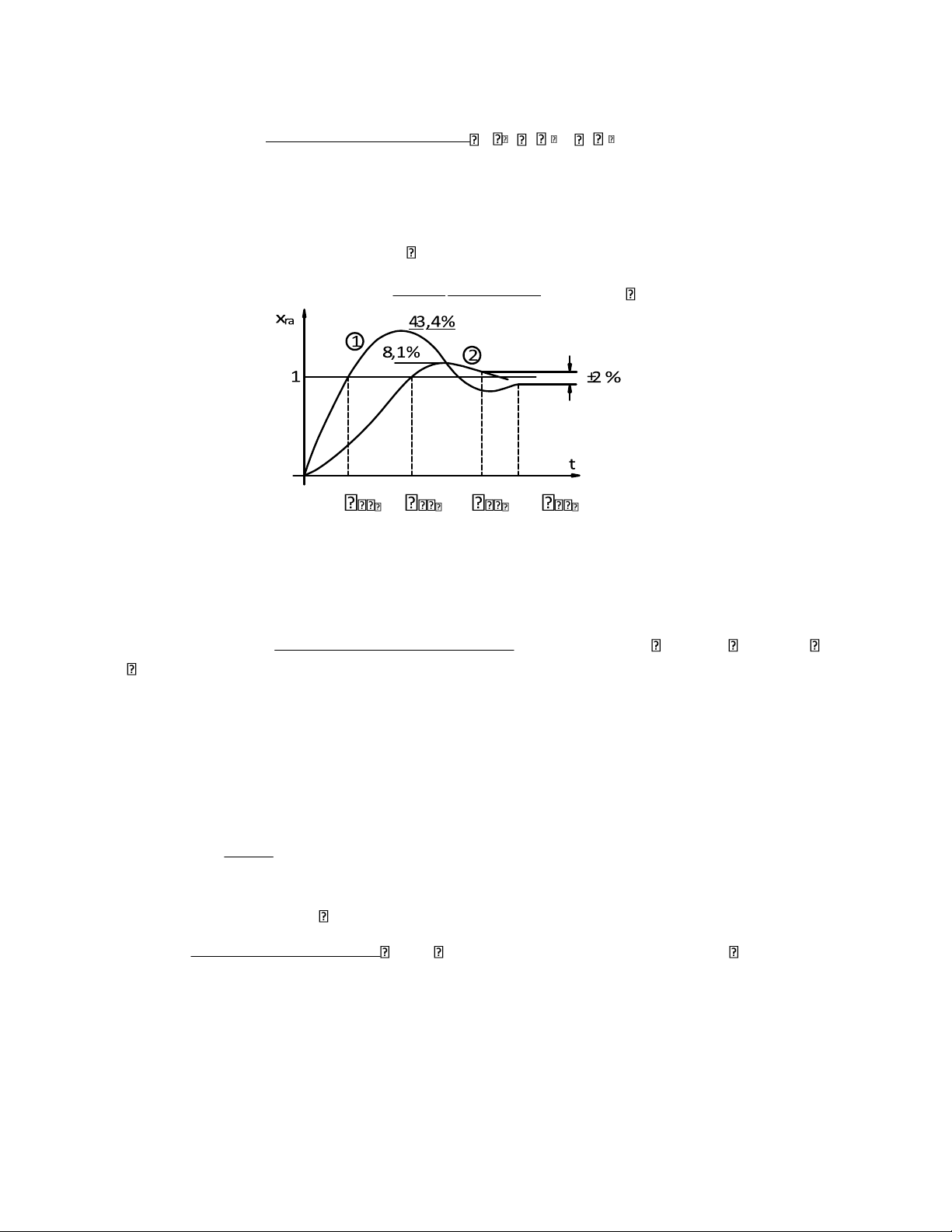
- Hàm chuẩn tối ưu đối xứng có dạng: 1 4 p FDX(p)=1
4 p 8 2 p2 8 3 p3 (1.107) và đặc
tính quá độ như đường 1 trên hình 1.29.
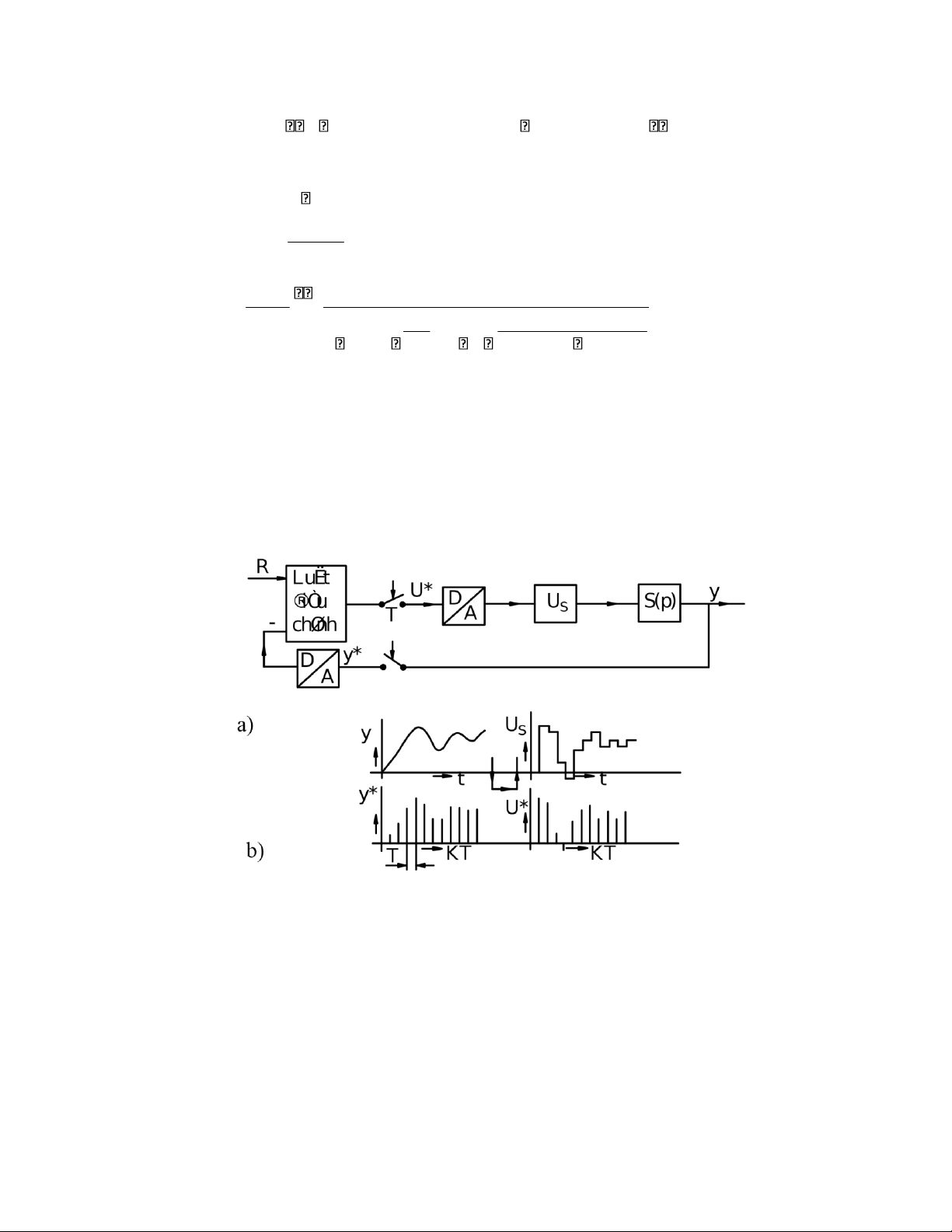
Xét một hệ thống F0(p) có dạng vô sai nhưng lại dùng PI: 1 T p0 K1 F0(p)=R(p)F0(p)=
KT p0 pT1(1 pTs ) (1.108) 0 3,1 7,8 13,3 16,5
Hình 1.29: Đặc tính quá độ của hàm tối ưu đối xứng
trong đó Ts là tổng của thời gian nhỏ. Hàm truyền hệ thống kín có dạng: F(p)= KTTT po 1 S
3 K 1KTT p(1 1 T p00 2) KT po 1
Áp dụng tiêu chuẩn mô đun đối xứng tìm được: a12-2a0a2=0 a 2 2
2 -2a1a3=0 suy ra (K1T0)2-2K1T0 KT1Ts=0 Giải
hệ phương trình trên có: 2K T1s K= T1; T0=4Ts .
Hàm truyền của hệ sẽ là 1 4Ts F(p)=1 4T ps 8T ps2 2 8T ps3 3 (1.109)
Áp dụng cách tìm bộ điều chỉnh nêu trên, tìm được R(p) là PID. Với loại vô
sai cấp 2, thì tìm được R(p) loại tỷ lệ. Nếu đối tượng hữu sai có T1>>Ts có thể làm gần đúng đạng (1.108): K1 K1 F0(p) = =
(1 T p2 )(1 1 T ps )
pT1(1 1 T ps ) làm được như vậy vì: 1 1 1 Tp Tp1 1
Do tử số có thành phần đạo hàm nên độ quá điều chỉnh lớn (43%) vì vậy
thường thêm khâu quán tính có hằng số thời gian 4Ts(hình 1.30), đặc tính quá độ là
đường 2 ở hình.1.29, độ quá điều chỉnh là 8,1% Hàm truyền của mạch bây giờ có dạng: X p( ) 1 F(p)=
X pd ( ) = 1 4T ps 8T ps2 2 8T ps3 3
H. 1.30: Sơ đồ giảm độ quá điều chỉnh của bộ điều chỉnh
1.16. Tổng hợp các bộ điều chỉnh theo nhiễu
Để dẫn ra thủ tục tổng hợp ta xét đối tượng như hình vẽ
H. 1.31: Tổng hợp bộ điều chỉnh theo nhiễu loạn
Giả sử T1>>Ts có thể coi F0(p) là hệ vô sai cấp 1, -Bộ
điều chỉnh PI theo tiêu chuẩn đối xứng có: R(p)= T 4 T p 1(1K T p s ) 1 8 s 2
Hàm truyền của hệ theo nhiễu là: X p( ) S p0 ( ) R p S p( ) 0 ( ) 1 F p( )
P p( ) 1 R p S p( ) 0 ( ) = R p( )[1 R p S p( ) 0 ( )] R p( )
Thay R(p) và F(p) vào và tổng hợp theo mô đun thì: 1 Tp1 R(p)= 2TK ps 1 thì: X p( ) 2KT p1 s R p( )
1 2Ts (1 2TT1 )p (1 T T p)2 22T 1 2TT p1 s2 3 s s s
1.17. Tổng hợp mạch vòng điều khiển số
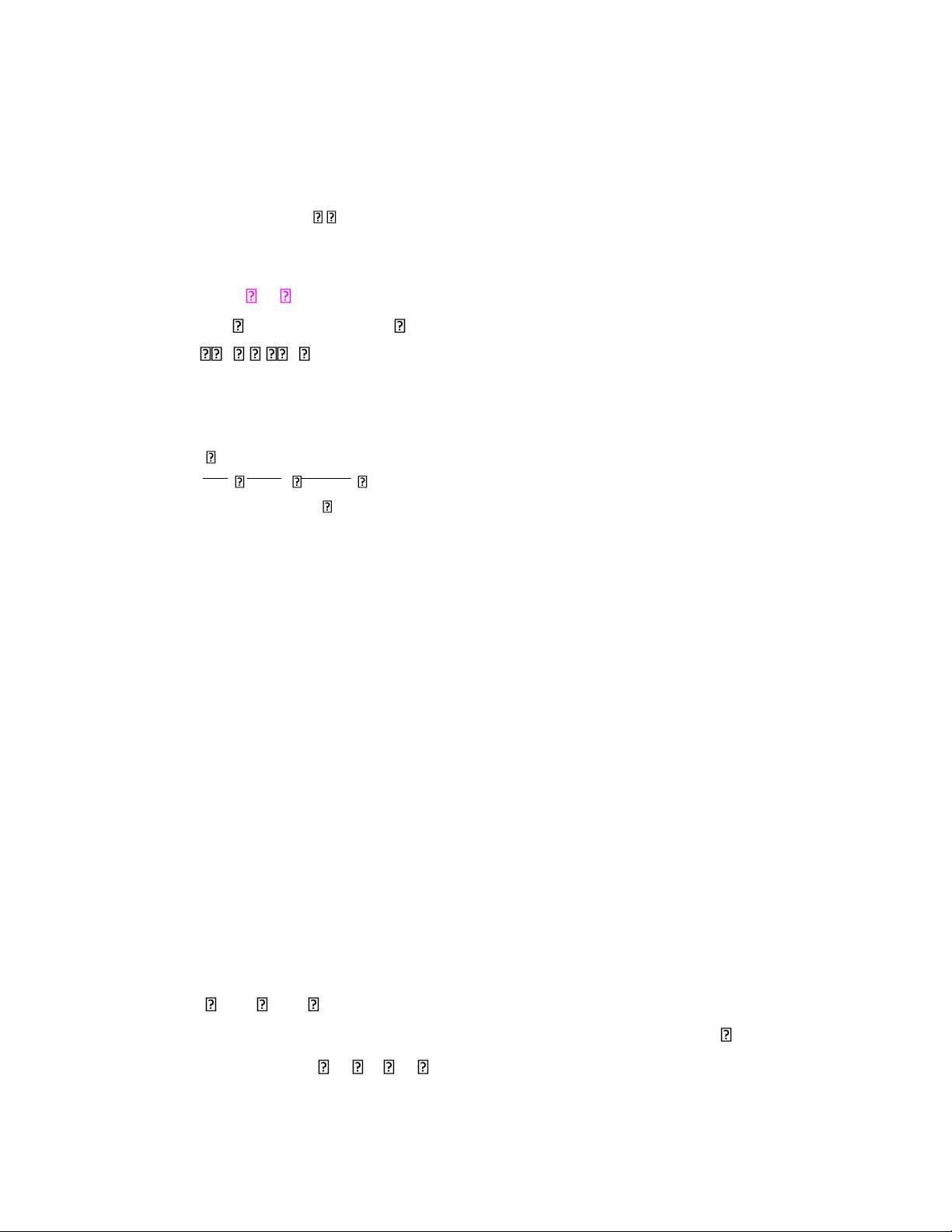
1.17.1. Số hoá các tín hiệu
Việc số hóa các tín hiệu được thực hiện trước hết bởi động tác lấy mẫu rồi chuyến đổi A/D.
Tín hiệu được lấy mẫu theo chu kỳ có độ dài T bằng cách chuyển mạch các
vị trí đo (xem hình l.33).
H. 1.33: a)Cấu trúc mạch điều chỉnh dùng máy tính số b) Chu kỳ lấy
mẫu, xử lý tín hiệu và đưa ra
S(p)- là phần liên tục của hệ thống và HD-
là phần tử lưu giữ tín hiệu.
a) Lượng tử hóa các tín hiệu.
Lượng tử hóa dữ liệu đưa vào máy tính được thực hiện bởi chuyển đổi A/D.
Dung lượng số Nym biểu diễn đại lượng liên tục y(t) cho bởi độ dài từ n, tức là tổng
số các bit của chuyển đổi A/D (trừ bít đánh dấu). Nym = 2n – 1 (l.110)
trong đó Ym là giá trị cực đại của đại lượng liên tục y(t). Đơn vị của việc số hóa đại lượng y(t) sẽ là Ym y N ym (1.111)
Giá trị bằng số của tín hiệu Ny ở đầu ra chuyển đổi A/D được xác định từ biểu thức: y=Ny y+ y (1.112)
hoặc y=y0+ y.Trong đó y0=Ny y là giá trị tương tự ứng với biểu diễn số Ny
y y là sai số của phép chuyển đổi.
Độ dài một từ n của chuyển đổi được chọn sao cho sai số do phép chuyển
đổi phải nhỏ hơn sai số của thiết bị đo đại lượng liên tục, trong nhiều trường hợp độ
dài từ chỉ cần 10 bít, khi đó sai số là: y 1 1 10 0,001 ym N ym 2 1
Độ dài từ lớn nhất bị hạn chế bởi tốc độ của chuyền đổi và tần số lấy mẫu
(theo định lý Shannon) .
Từ đầu ra của chuyển đổi A/D, tín hiệu số đi đến bộ xử lý trung tâm (CPU),
tại đó nó được so sánh với đầu vào và được xử lý theo luật điều chỉnh đã chọn.
Giá trị của tác động điều chỉnh đưa ra từ máy tính tại thời điểm lấy mẫu thứ k sẽ là:
u(k)=-p1u(k-1)-p2(k-2)....+g0e(k)+g1e(k-1)+.. (1.113)
Trong đó p1, p2.. g0, g1 .. là các tham số luật điều chỉnh, e(k) = R(k) - Y(k) là sai lệch
điều chỉnh tại thời điểm lấy mẫu thứ k.
Trong các bộ điều chỉnh số, để thực hiện tính toán nhanh với độ chính xác
cao, người ta thường tránh phép nhân bằng phép cộng hoặc phép dịch bít trái hay phải .
Thí dụ nhân một số với số 2k tương đương với phép dịch sang trái k bit,
nhân một số với 2k tương đương dịch biểu diễn cơ số hai của số đó sang phải k bít.
Vì vậy cần cố gắng biểu diễn hoặc lựa chọn các tham số p1 của bộ điều chỉnh số có
dạng 2k, với k là nguyên dương hoặc âm
Đơn vị lượng tử của tác động điều khiển xác định như sau: u=p0 p+y0 p (1.116)
Sai số do quá trình lượng tử hóa gây ra sẽ đạt giá trị cực đại Um khi: p0=Pm,y0=Ym; y= y, p= p; và 1 1 U ( )
m=Pm y+Ym p= pmYm Nym N pm (1.117)
Để hạn chế sai số này, thường chọn độ dài từ của thiết bị tính lớn hơn hai lần độ
dài từ của chuyển đổi A/D . Thí dụ : chuyển đổi độ dài từ là (7+1) bit thì: Nym=27-1=127
Nếu chọn máy tính có độ dài từ là (15 +1) bít thì:
Num = 215 - 1 = 32.767. Khi chọn sử dụng các giá trị cực đại là 10 Ym = Um =10V, Pm= 10
Đơn vị lượng tử của tác động điều khiển là: U m 10.10( )=0,78V
Do phép số hóa mà từng chế độ xác lập có thể xuất hiện:
1. Sai lệch điều chỉnh kéo đài; .
2. Sai lệch điều chỉnh biến đổi ngẫu nhiên với độ lớn vài đơn vị lượng tử;
3. Dao động tẩn sô thấp có chu kỳ bằng một số chu kỳ lấy mẫu và có biênđộ
cỡ vài đơn vị lựợng tử.
b. Phạm vi biểu diễn số và tín hiệu ra
Chú ý: Máy tính xử lý các tín hiệu trong khoảng thời gian xác định (thời gian
tính) và giữa hai lần lấy mẫu thì thông tin chứa trong tín hiệu bị mất, gây khó khăn
cho hoạt động của hệ thống, vì vậy nếu giữ nguyên độ nhạy của máy với các thay
đổi thông số của đối tượng thì hệ điều chỉnh số chậm hơn so với hệ liên tục tương
đương.Tần số lấy mẫu là thông số quan trọng, quyết định tính chất của mạch điều
chỉnh số và được chọn theo định lý Shannon sao cho phổ tần tín hiệu điều chỉnh
không chứa tần số lấy mẫu .
Thực hiện điều này bằng cách chọn chu kỳ lấy mẫu T bằng K lần nhỏ hơn
so với hằng số thời gian thay thế Tr của mạch vòng kín. T=Tr/K K 2 (1.118)
Hằng số thời gian thay thế được xác định giống như trong quá trình tổng hợp
các mạch vòng điều chỉnh liên tục và có bổ sung chu kỳ lấy mẫu: Tr = (2 4)( +T/2) (1.119)
trong đó là tổng các hằng thời gian không được bù của đối tượng khi tổng hợp luật điều chỉnh số.
Để việc lấy mẫu không ảnh hưởng nhiều tới đặc tính động của hệ thống, nên
chọn chu kỳ lấy mẫu T gần bằng , nghĩa là hệ số K trong (1.118) lấy bằng từ 3 đến 6 .
1.17.2. Hệ thống điều chỉnh số. Dùng số vì:
-Đại lượng cho trước thường cho ở dạng số (thường từ máy tính hoặc từ khối điều khiển số..)
-Yêu cầu có độ chính xác cao trong phạm vi điều chỉnh tốc độ
lớn. -Yêu cầu đại lượng ra được cho dưới dạng số -Hệ thống điều
khiển số rẻ tiền do dùng vi mạch.
Tăng độ chính xác điều chỉnh chủ yếu là tăng độ chính xác của hệ thống đo
lường. Việc sử dụng tín hiệu số đã loại trừ được các nhược điểm của máy phát tốc.
Song nhược điểm cơ bản của điều chỉnh số so với điều chỉnh analog là việc tạo ra
những giá trị đo lường cần thiết bao giờ cũng cần một khoảng thời gian nào đó. Vì
thế người ta thường kết hợp 2 hệ thống với nhau hình 1.34.
Mạch trong được xây dựng trên cơ sở analog là mạch có độ chính xác kém
nhưng dập tắt nhiễu điều chỉnh rất nhanh.
Ngược lại bộ điều chỉnh số làm tăng độ chính xác điều chỉnh ở trạng thái ổn định hệ thống analog
Hệ thống gồm bộ điều chỉnh RA, đối tượng điều chỉnh OR và hệ thống đo lường UP1.
H. 1.34: Hệ thống điều khiển số với mạch analog phía trong
Hệ thống đo lường UP2 đo đại lượng điều chỉnh x và tạo ra một dãy xung có
tần số f=kx, trong đó k-hằng số. Giá trị cho trước của tần số fz bằng tích của tần số
cực đại (đồng hồ) f0 với giá trị số của đại lượng điều chỉnh Ln. So sánh tần số cho
trước fz và đại lượng phản ánh tốc độ f ở khâu CP. Khi f f0 đại lượng f sẽ điều
khiển bộ đếm 2 chiều LR, rồi qua bộ biến đổi số - tương tự D/A tạo ra một tín hiệu
hiệu chỉnh phụ xC cho khâu điều chỉnh tương tự. Khâu so sánh CP cùng với bộ đếm
2 chiều LR tạo ra bộ tích phân số đảm bảo độ zero tĩnh của cả hệ thống điều chỉnh.
Bộ điều chỉnh tương tự thường là khâu tỷ lệ có hệ số khuyếch đại được chọn trên cơ
sở các yêu cầu động của hệ thống kín.
1.18. Điều chỉnh thích nghi.
Khi các hệ thống truyền động điện công nghiệp làm việc có thể xảy ra những thay đổi sau đây:
-Sự thay đổi cấu trúc và thông số của mạch rô to động cơ một chiều cấp điện
từ bộ biến đổi ti-ri-sto khi chuyển từ chế độ dòng liên tục sang không liên tục và ngược lại.
-Thay đổi hằng số thời gian điện cơ của động cơ TM -Thay
đổi thời gian chết chuyển dòng điện mạch rô to T0.
-Thay đổi từ thông kích từ
-Thay đổi hằng số thời gian mạch kích từ Tw.
Trong thực tế người ta sử dụng 2 phương pháp điều chỉnh thích nghi cho hệ
thống truyền động điện:
-Dùng bộ điều chỉnh chuyển nối PI
-Dùng hệ thống thích nghi với mô hình. khiÓn
H. 1.36: Hệ thống thích nghi có bộ chuyển nối bộ điều chỉnh
-Tác động nhanh do sử dụng thông tin lớn ở dạng mô hình quá trình,
-Đơn giản thực hiện thuật giải
-Có khả năng nhận biết đối tượng do có sử dụng tín hiệu thử phụ.
2.Hệ thống thích nghi với mô hình mẫu
Trên h.1.37 biểu diễn một sơ đồ khối tổng quát hệ thống điều khiển thích
nghi với mô hình cho trước.
H. 1.37: Hệ thống thích nghi với mô hình mẫu
Giả sử ys là tín hiệu ra của hệ thống điều chỉnh ys = f1(u, s, xs,t) còn (1.130)
ym là tín hiệu ra của mô hình và ym = f2(u, m,xm,t) (1.131)
trong đó u là véc tơ cưỡng bức, s, m véc tơ thông số của hệ thống điều chỉnh và của
mô hình xs, xm - véc tơ trạng thái của hệ thống điều chỉnh và của mô hình,t-thời gian
Dưới khái niệm hệ thống thích nghi với mô hình ta hiểu đó là hệ thống thực
hiện tối thiểu chỉ số chất lượng sau: I = f( m - s , xm-xs ,t) (1.132)
bằng cách biến đổi các thông số i ở lối vào của hệ thống gián tiếp nhờ thuật giải
thích nghi, trong đó = ym-ys là véc tơ sai số tổng, m - s- hiệu cấu trúc, , xm-xs - hiệu trạng thái.
Có 2 hệ thống điều chỉnh thích nghi với mô hình:
-Hệ thống trực tiếp sử dụng mô hình chuẩn, cung cấp một đáp ứng cần thiết
cho điều khiển. Chỉ số chất lượng trong trường hợp này cho ở dạng rõ ràng.
-Hệ thống gián tiếp (h.1.38) là hệ thống trong đó để thích nghi người ta sử
dụng thông tin lấy từ hệ thống nhận dạng đối tượng khi sử dụng mô hình các thông số biến đổi.
H. 1.38: Hệ thống thích nghi có bộ nhận dạng mô hình thích nghi
Tài liệu liên quan:
-

Phương trình đường cầu và cung theo giá: BT KTVM1 Guide
1 1 -

CTDT DIEN 1 - EE1 Program Final Exam Overview and Objectives
9 5 -

Trắc Nghiệm Phóng Chiếu Rorschach: Phân Tích và Ứng Dụng Tâm Lý
10 5 -

Hướng Dẫn Sử Dụng SPSS Trong Phân Tích Định Lượng HD-231
10 5 -

Bài Tập PLC S7 1200: Hướng Dẫn Giải và Thực Hành FBD
15 8