Bài giảng Chương 4 - Điều khiển tự động các hệ thống truyền động điện môn Truyền động điện tự động | Trường Đại học Bách Khoa Hà Nội
Hệ thống truyền động điện ti-ri-sto được xây dựng với 2 vòng phản hồi âm:
-phản hồi dòng điện ở trong và
-phản hồi điều chỉnh tốc độ ở ngoàiHệ thống truyền động điện ti-ri-sto được xây dựng với 2 vòng phản hồi âm: phản hồi dòng điện ở trong và phản hồi điều chỉnh tốc độ ở ngoài. Tài liệu được sưu tầm gồm 19 trang, giúp các bạn ôn luyện và phục vụ cho việc học tập, đạt kết quả tốt. Mời các bạn đón xem!
Môn: Truyền động điện tự động 26 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5 K tài liệu
Tác giả:
Preview text:
lOMoAR cPSD| 59421307 CHƯƠNG 4.
TỔNG HỢP CÁC HỆ THỐNG ĐIỀU KHIỂN ĐỘNG
CƠ ĐIỆN MỘT CHIỀU.
4.1 Cấu trúc cơ bản của hệ thống truyền động điện điều chỉnh động cơ
điện một chiều cấp điện từ các bộ biến đổi.
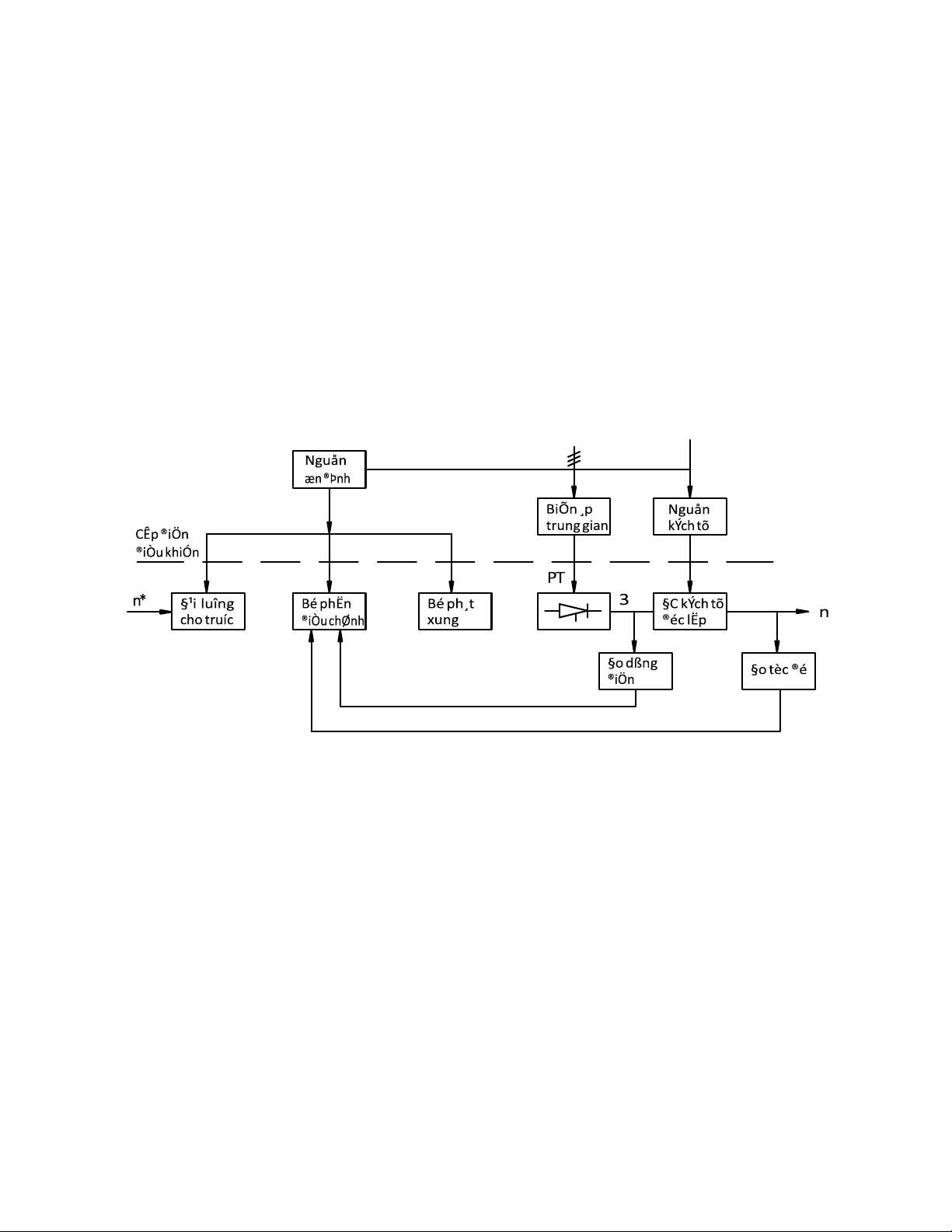
Hệ thống truyền động điện ti-ri-sto được xây dựng với 2 vòng phản hồi âm:
-phản hồi dòng điện ở trong và
-phản hồi điều chỉnh tốc độ ở ngoài (Hình .4.1).
Đôi khi người ta cũng dùng thêm vòng phản hồi số. Hệ thống điều chỉnh tốc
độ có thêm vòng điều chỉnh số có tốc độ tác động nhanh (phản hồi tốc độ) và chính xác (phản hồi số).
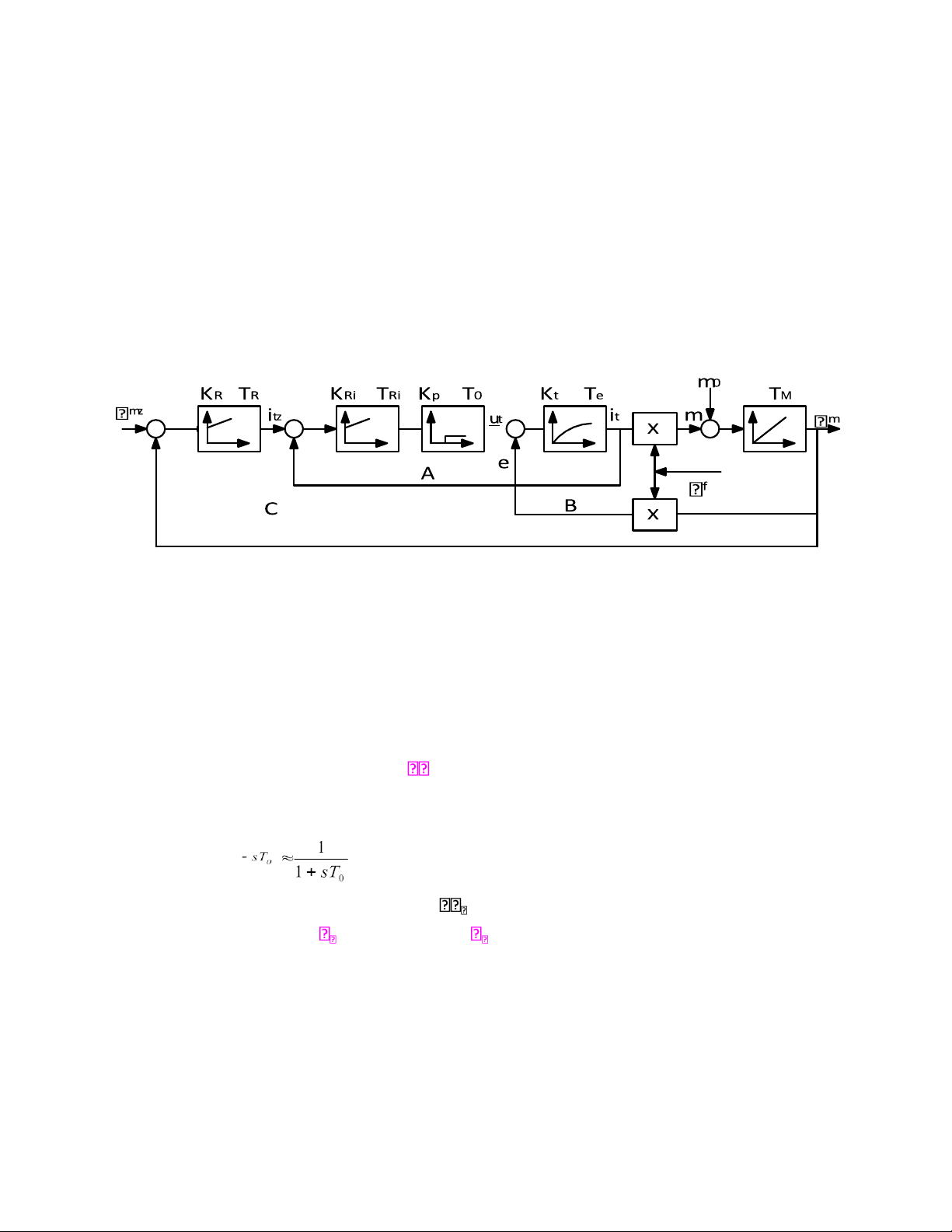
H. 4.1: Sơ đồ chức năng truyền động điện tự động ti-ri-sto điều chỉnh tốc độ
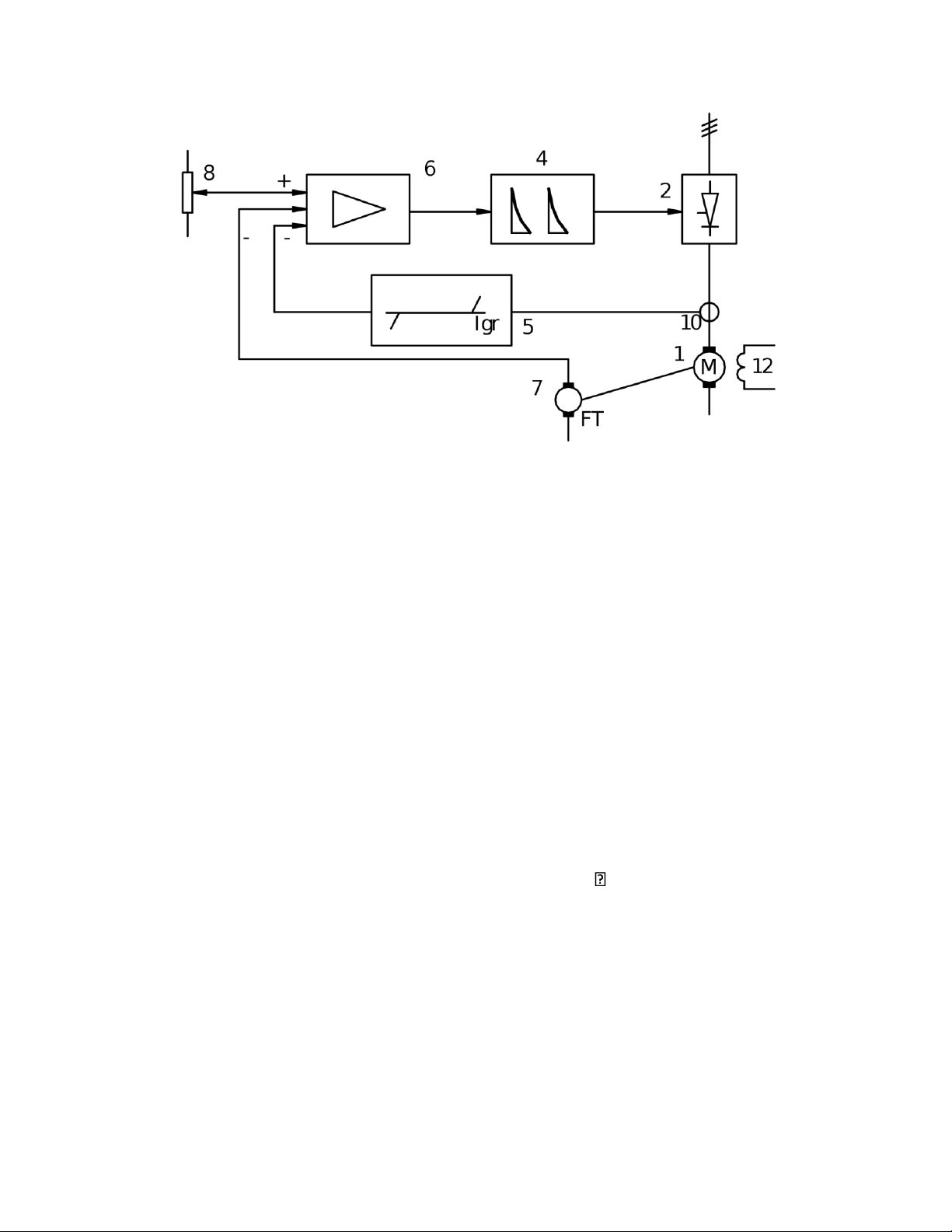
4.1.1 Hệ thống với khâu phản hồi phi tuyến
Hệ thống với khâu phản hồi phi tuyến hình 4.2 hoạt động như sau:
-Cho tới khi dòng phần ứng còn chưa đạt giá trị giới hạn, chỉ mạch điều chỉnh tốc độ hoạt động.
- Khi vượt quá giá trị cho phép của dòng phần ứng, sẽ tác động mạch vòng dòng điện.
Phương án này rất có hiệu quả nếu hệ số khuyếch đại dòng điện ở mạch phản hồi có giá trị lớn. lOMoAR cPSD| 59421307
H. 4.2: Sơ đồ hệ thống TĐĐ ti-ri-sto có phản hồi âm với khâu phi tuyến. 4-hệ thống mở ti-
ri-sto, 5-khâu phi tuyến, 6-khuyếch đại điều chỉnh phản hồi tốc độ
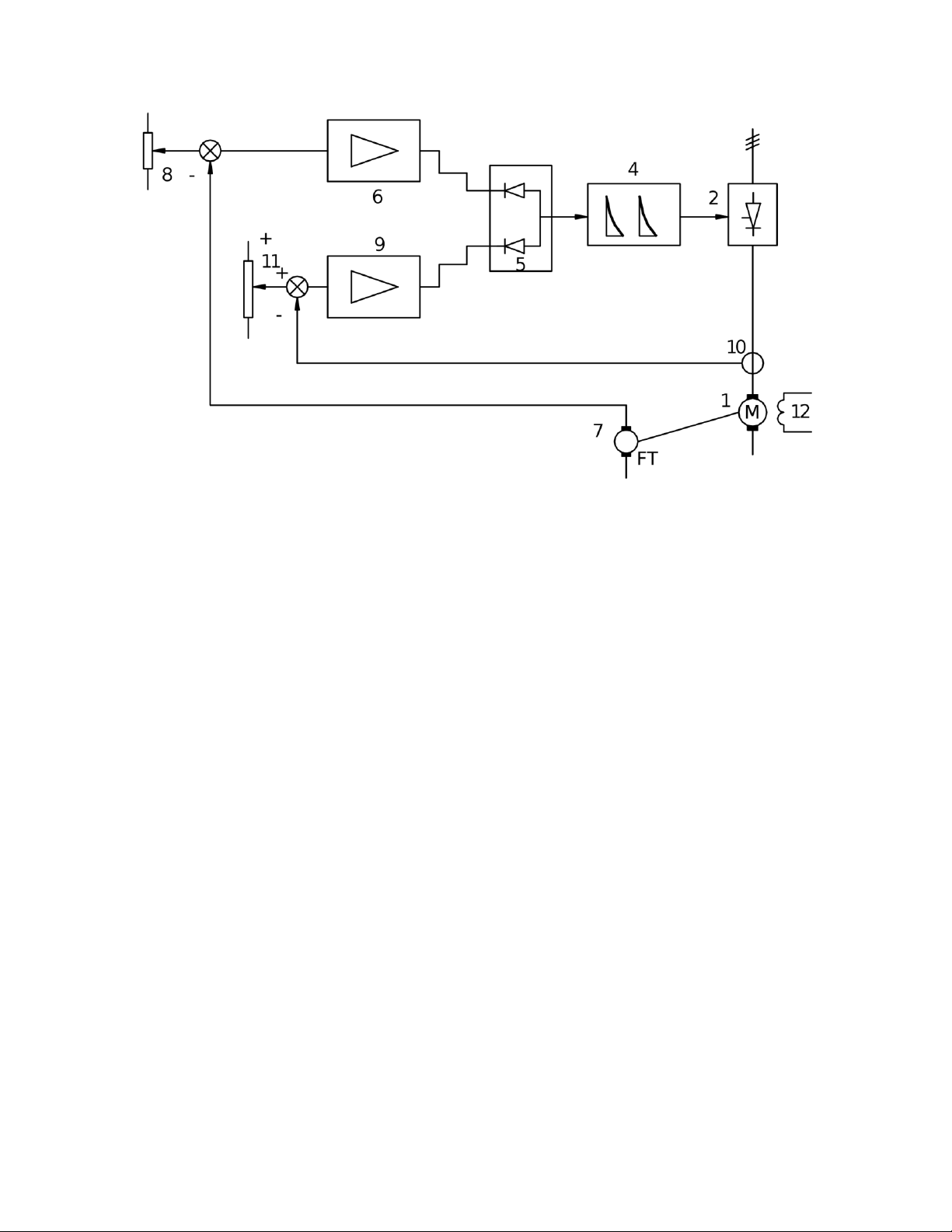
4.1.2 Mắc song song mạch điều chỉnh tốc độ và dòng điện.
Trong hệ thống này có khâu nhỏ hơn (hình 4.3). Hệ thống mở ti-ri-sto 4 tạo ra
các xung để mở tuần tự các ti-ri-sto của bộ biến đổi ti-ri-sto 2. Hoạt động:
-Nếu Ittạo ra, khuyếch đại phụ 9 được điều khiển hoàn toàn, áp ở lối ra>0 ứng với độ bão
hoà bình thường trên đặc tính điều khiển, hoặc bằng giá trị đặt giới hạn cho nó, khâu
5 chuyển tín hiệu điện áp từ bộ khuyếch đại điều-chỉnh tốc độ (6) nhỏ hơn tín hiệu ra
của (9). Bộ khuyếch đại -điều chỉnh 6 khuyếch đại hiệu điện áp cho trước (8) và điện
áp đo được từ máy phát tốc. Cho tới khi IKhi khởi động hoặc quá tải, It tăng điện áp ra của khâu khuyếch đại - điều
chỉnh 9 giảm và khâu 5 sẽ chỉ truyền tín hiệu khâu (9), tín hiệu này tác động lên hệ
thống điều khiển mở ti-ri-sto nhằm tăng góc điều khiển w, nên sẽ giới hạn dòng rô to tới giá trị Ighạn.
Khi mạch giới hạn dòng phần ứng hoạt động , sai số điều khiển tốc độ khá
lớn, làm cho khuyếch đại 6 bị điều khiển hoàn toàn, điện áp ra đạt giá trị cực đại, đảm
bảo cho khâu nhỏ hơn hoạt động. Khâu này sẽ chỉ chuyển tín hiệu đã được khuyếch
đại và tạo ra bởi (9) nhằm đảm bảo giới hạn dòng rô to. Sau khi giảm dòng rô to xuống
dưới giá trị cho phép Igr bộ điều chỉnh 6 sẽ hoạt động ngay lập tức. lOMoAR cPSD| 59421307
H. 4.3: Sơ đồ hệ thống TĐĐ ti-ri-sto mắc song song khâu điều chỉnh tốc độ và dòng điện;
5-là khâu loại nhỏ hơn, 9-khuyếch đại điều chỉnh phản hồi dòng điện, 11-chiết áp cho dòng giới hạn
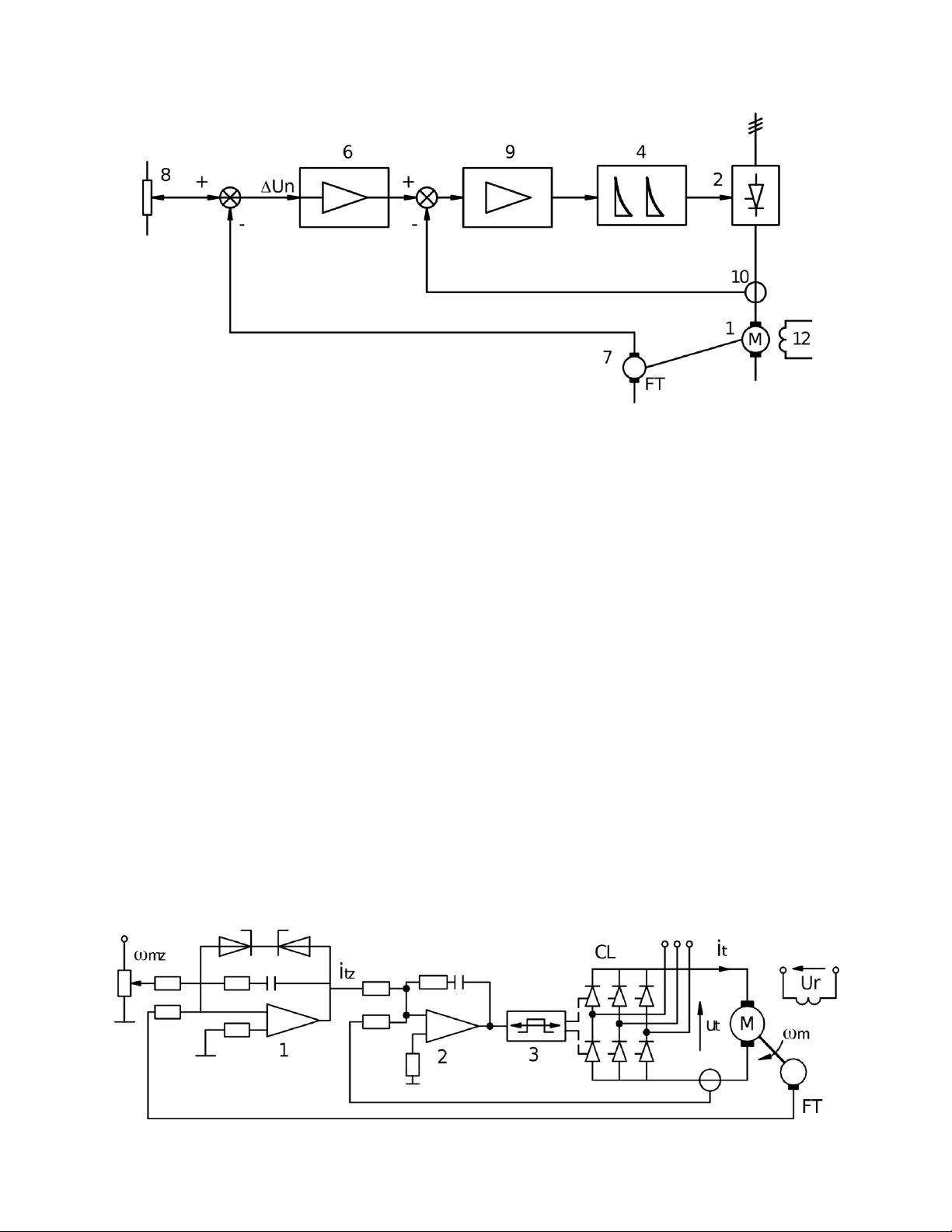
4.1.3 Mắc nối tiếp mạch điều chỉnh tốc độ là dòng điện.
Hệ thống ở hình 4.3 có nhược điểm: khi chuyển tín hiệu điều khiển từ khối 6
sang 9 hệ thống bị dao động. Lúc này dùng hệ thống mắc nối tiếp hình 4.4
Hệ thống hoạt động như sau: Ti-ri-sto của bộ biến đổi 2 được hệ thống điều
khiển 4 mở . Hệ thống 4 được cấp điện từ bộ khuyếch đại-điều chỉnh 9 trên cơ sở
khuyếch đại hiệu điện áp cho trước của bộ khuyếch đai-điều chỉnh 6 và điện áp đo
được từ cảm biến dòng 10. Tín hiệu ra của bộ điều tốc U6, đồng thời là tín hiệu cho
trước của bộ điều chỉnh dòng điện. Vì trong tính chất của điều khiển bộ (6) có giới
hạn tín hiệu ra, do đó nó có thể giới hạn dòng phần ứng.
Trong quá trình khởi động, sau khi đóng điện áp cho trước, khuyếch đại 6 đạt
được điều khiển hoàn toàn rất nhanh và đạt giá trị Umax , vì tín hiệu phản hồi âm tốc
độ lúc đầu bằng không, sau đó tăng cùng với tốc độ tăng. Ở pha này của quá trình
khởi động, bộ điều chỉnh dòng 9 giữ cho dòng stato có giá trị không đổi khi nó điều
khiển để thay đổi góc mở của hệ thống 4 khi tốc độ động cơ tăng. lOMoAR cPSD| 59421307
H. 4.4: Sơ đồ hệ thống TĐĐ ti-ri-sto mắc nối tiếp khâu phản hồi tốc độ và dòng điện.
6khuyếch đại điều chỉnh phản hồi tốc độ có đặt giới hạn điện áp ra, ∆Un-tín hiệu điện áp
sai số điều chỉnh tốc độ Kết luận:
-Hệ thống có phần tử phi tuyến hoạt động kém hơn hệ thống mắc song song
-Với những hệ đơn giản, có số lượng khâu quán tính ở kênh chính nhỏ hơn
2 thì hệ song song và nối tiếp có tính chất như nhau
-Khi hệ thống phức tạp có nhiều khâu quán tính ở kênh chính thì hệ thống nối tiếp tốt hơn.
Với hệ thống có giới hạn dòng điện thì ta có thể khởi động tối ưu với thời gian
cho trước, và không vượt quá giá trị dòng điện và mô men cho trước.
4.2 Sơ đồ tổng quát hệ thống điều chỉnh tốc độ động cơ điện một chiều.
Trên hình 4.5 biểu diễn sơ đồ chức năng của hệ thống . Để tổng hợp các bộ điều
chỉnh giả thiết rằng, dòng điện chạy qua van trong suốt quá trình điều chỉnh và mô
men của động cơ có tính liên tục. Dựa vào sơ đồ chức năng xây dựng sơ đồ khối của
hệ thống điều chỉnh tốc độ động cơ một chiều như ở h.4.6. ABC lOMoAR cPSD| 59421307
H. 4.5: Sơ đồ cơ bản của hệ thống truyền động điện dòng một chiều cấp điện từ bộ chỉnh lưu.
Từ sơ đồ khối ta thấy hệ thống có 3 vòng điều khiển:
-Mạch vòng điều khiển dòng điện (A) với bộ điều chỉnh PI có tham số KRi, TRi ,
-Mạch vòng điều khiển sđđ cảm ứng phần ứng (B) có hệ số tỷ lệ và hằng số thời gian ký hiệu Kt và Te,
-Mạch vòng điều chỉnh tốc độ loại PI có tham số KR và TR.
Do sử dụng cách mắc nối tiếp nên bộ điều chỉnh ở vòng ngoài sẽ điều khiển bộ
điều chỉnh ở vòng trong.
H. 4.6: Sơ đồ khối của hệ thống trên hình 4.5
4.3 Tổng hợp các mạch điều chỉnh dòng điện
4.3.1. Tổng hợp mạch điều chỉnh dòng rô to.
-Giả thiết là dòng điện liên tục
-Coi sđđ của động cơ là nhiễu, nên bỏ qua ảnh hưởng của sđđ này lên tính động
của mạch điều chỉnh dòng điện vì nó sẽ thay đổi rất chậm so với thời gian ổn định của
dòng điện rô to it. Khi giả thiết TM đồng nghĩa với việc dừng động cơ.
-Khi Te >>T0, bộ biến đổi ti-ri-sto có thể thay thế bằng khâu quán tính bậc 1 và nhận : e (4.1)
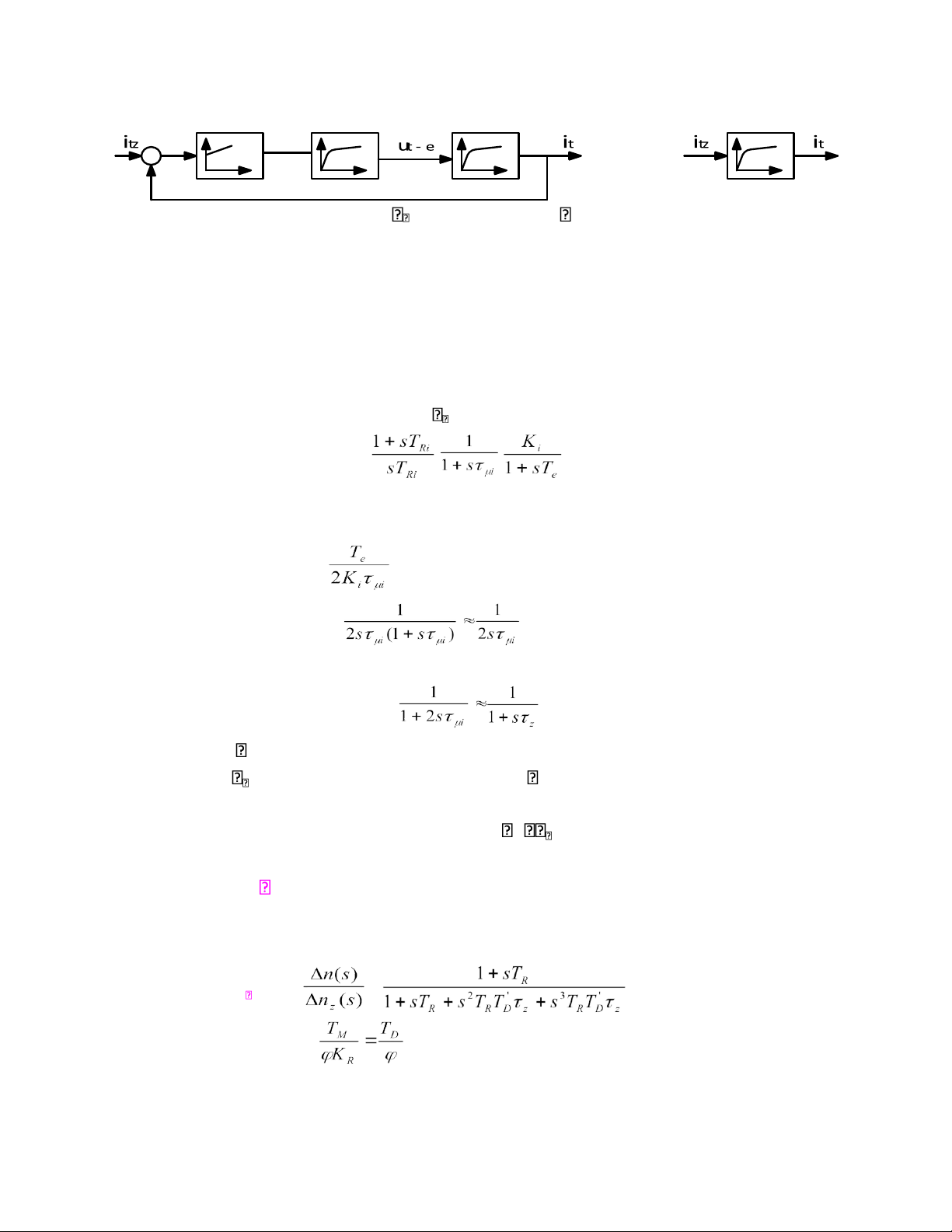
Mạch điều chỉnh dòng ở h.4.7,
i là tổng các hằng số thời gian nhỏ: i = T0+Ti+Tt , i <(4.2)
trong đó : T0 - thời gian chết trung bình của bộ biến đổi, Ti - hằng số thời gian
của hệ thống đo dòng điện, Tt -hằng số thời gian của hệ điều khiển ti-ri-sto.
Từ h 4.7 mạch điều chỉnh gồm 3 khâu: Bộ đ/c PI (KRi,TRi), bộ c.lưu thay bằng
khâu quán tính bậc 1 có thời gian trễ T0 và bộ điều chỉnh sđđ (Kt,Te). lOMoAR cPSD| 59421307 KRi TRi i Kt Te z a) b) Hàm
H. 4.7: Sơ đồ khối mạch điều chỉnh dòng phần ứng (a), Sơ đồ đơn giản của mạch
truyền hệ hở của hệ thống điều chỉnh biểu diễn bởi công thức:
theo chỉ tiêu mô đun (b); i-tổng hằng số thời gian của mạch, G0(s)=KRi (4.3)
Trong đó Ki =KTKp là hệ số khuyếch đại của hệ thống khi hở mạch điều chỉnh
dòng điện. Nếu chọn các bộ điều chỉnh dòng theo chỉ tiêu môđun có: KRi = , TRi =Te (4.4) được: G0(s)= (4.5)
Giá trị hàm truyền hệ kín (4.5) có thể nhận gần đúng như sau: Gz(s)= (4.6)
Ở đây z là hằng số thời gian tương đương của hệ kín. Trong các hệ thống sử
dụng thực tế, i có giá trị khoảng 5mgy, do đó z có giá trị khoảng 10mgy. Như vậy
mạch kín điều chỉnh dòng điện tối ưu hóa theo chỉ tiêu mô đun được thay thế bằng
khâu quán tính bậc một có hằng số thời gian z i (H.4.7b).
4.3.2 Tổng hợp mạch điều chỉnh và đặc tính động của hệ thống khi từ thông
kích từ thay đổi ( f =var).
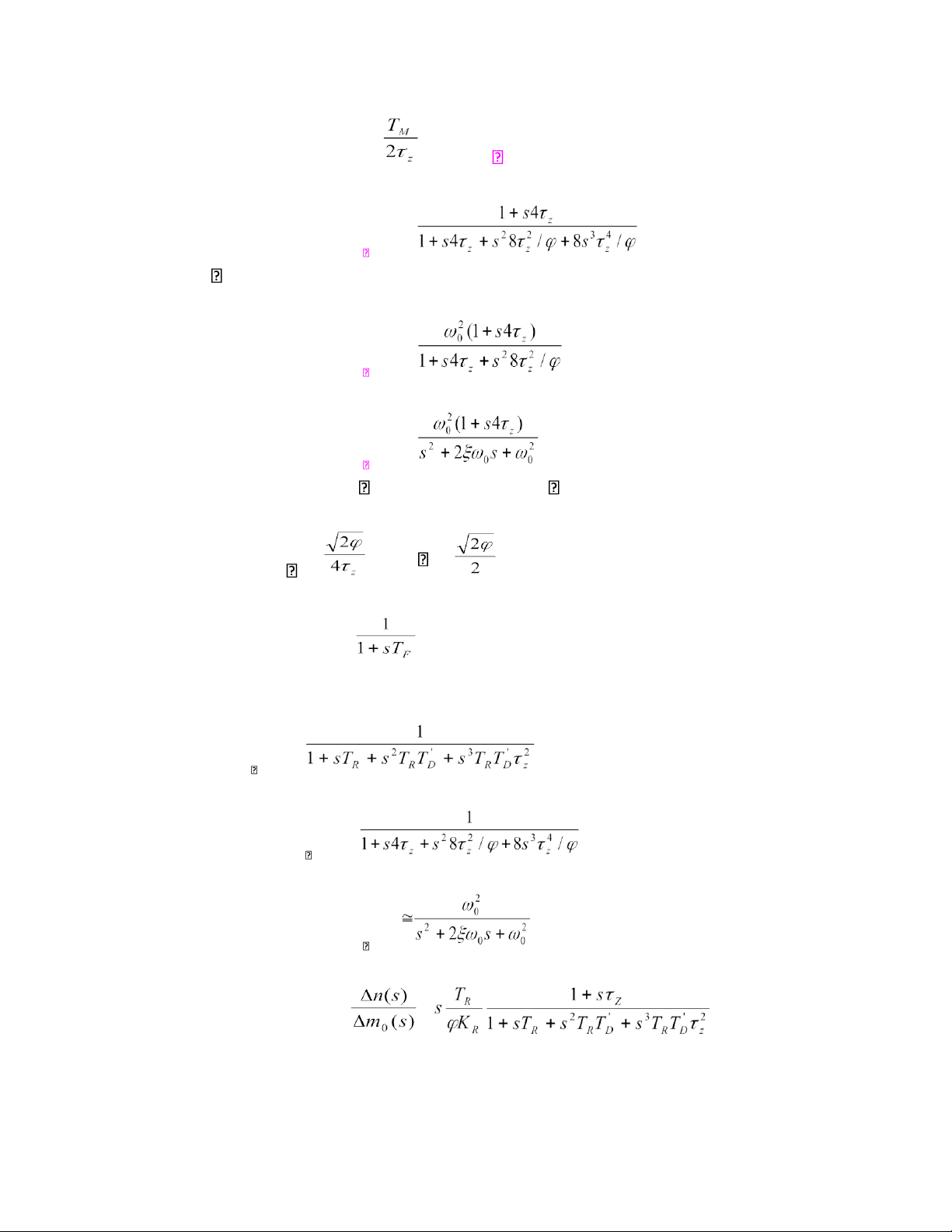
Hàm truyền của hệ thống theo tín hiệu điều khiển khi từ thông kích từ thay
đổi, biểu diễn bằng biểu thức: Gp (s) = = (4.7) Trong đó T’D =
Nếu chọn bộ điều chỉnh theo tiêu chuẩn tối ưu đối xứng (1.69,1.70) tức là: lOMoAR cPSD| 59421307 KR = , TR = 4 z (4.8 )
Thì hàm truyền (4.7) của hệ thống có dạng: Gp (s) = (4.9 )
Vì z<<1 nên ta bỏ qua các số hạng có số mũ bậc 3 trong hàm truyền (4.9),
nhận được biểu thức gần đúng như sau: Gp (s) = (4.10)
hoặc có thể biểu diễn bởi biểu thức: Gp (s) = (4.11)
Hệ số dập dao động và tần số dao động 0 phụ thuộc vào từ thông kích từ,
có thể biểu diễn bằng biểu thức sau: , = 0 = (4.12 )
Khi chọn bộ lọc có hàm truyền : GF(s) = (4.13 )
có hằng số thời gian TF =TR sẽ khử được khâu cường kích trong tử số của (4.7) và nhận được: Gp (s) = (4.14 )
Còn nếu lựa chọn bộ điều chỉnh loại PI (4.8) được: Gp (s) =
(4.15 ) hoặc giá trị gần đúng: Gp (s) (4.16 )
Tương tự xác định hàm truyền theo nhiễu: = Gd(s) = (4.17 )
Chọn bộ điều chỉnh theo chỉ tiêu đối xứng (4.8) ta có: lOMoAR cPSD| 59421307 Gz (s) = (4.18 ) hoặc gần đúng: Gz (s) = (4.19)
Trong đó 0 và xác định bằng (4.12).
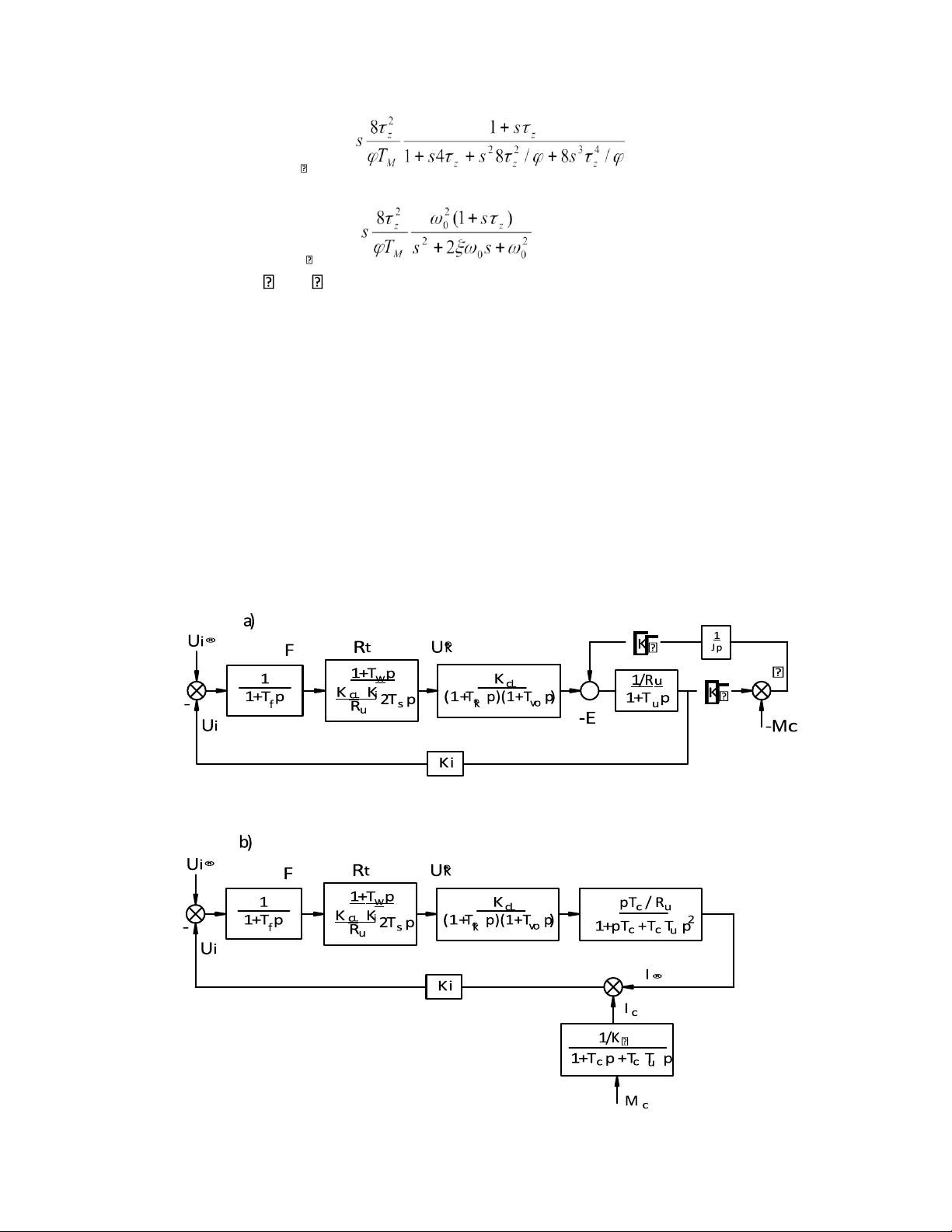
4.3.3 Tổng hợp mạch vòng dòng điện có chú ý sđđ của động cơ
Sơ đồ khối để tổng hợp mạch vòng dòng điện có chú ý tới ảnh hưởng của
sđđ động cơ biểu diễn ở h.4.11a, sau khi biến đổi biểu diễn trên h.4.11b. lOMoAR cPSD| 59421307
H. 4.11 Mạch điều chỉnh dòng điện chú ý tới sđđ
Trong đó Iđ(p), Ic(p) là thành phần dòng điện động và tĩnh của động cơ. Khi
không tải Mc=0 thì hàm truyền của mạch vòng như sau: = =
Ta nhận thấy mạch vòng điều chỉnh là hữu sai với hệ số sai lệch tĩnh bằng: C0=
Từ biểu thức ta thấy nếu hằng số thời gian điện cơ Tc càng lớn thì hệ số sai
lệch tĩnh càng nhỏ. Để mạch vòng đạt tiêu chuẩn môđun tối ưu, ta phải tổng hợp lại
cấu trúc và lựa chọn tham số bộ điều chỉnh, cụ thể: Ri(p)= (4.20)
Nếu thoả mãn điều kiện Tc>4Tư nghĩa là TưTcp2+Tcp+1=(1+T1p)(1+T2p) thì có thể
dùng hai bộ điều chỉnh PI nối tiếp để thoả mãn (4.20). Với các hệ thống có yêu cầu
không cao lắm về chất lượng, thì có thể dùng một PI để bù hằng số thời gian lớn và
chấp nhận sai số tĩnh của hệ.
4.4. Tổng hợp mạch điều chỉnh tốc độ.
4.4.1 Tổng hợp mạch điều chỉnh tốc độ dùng bộ điều chỉnh tỷ lệ[2]
Khi bỏ qua ảnh hưởng của sđđ của động cơ ta có hàm truyền theo tín hiệu dẫn như sau: = (4.21)
có thể thay (4.21) bởi biểu thức gần đúng hàm truyền của mạch vòng dòng điện: =
(4.22) hoặc mạch vòng dòng điện được tổng hợp
theo tiêu chuẩn tối ưu đối xứng thì: = (4.23)
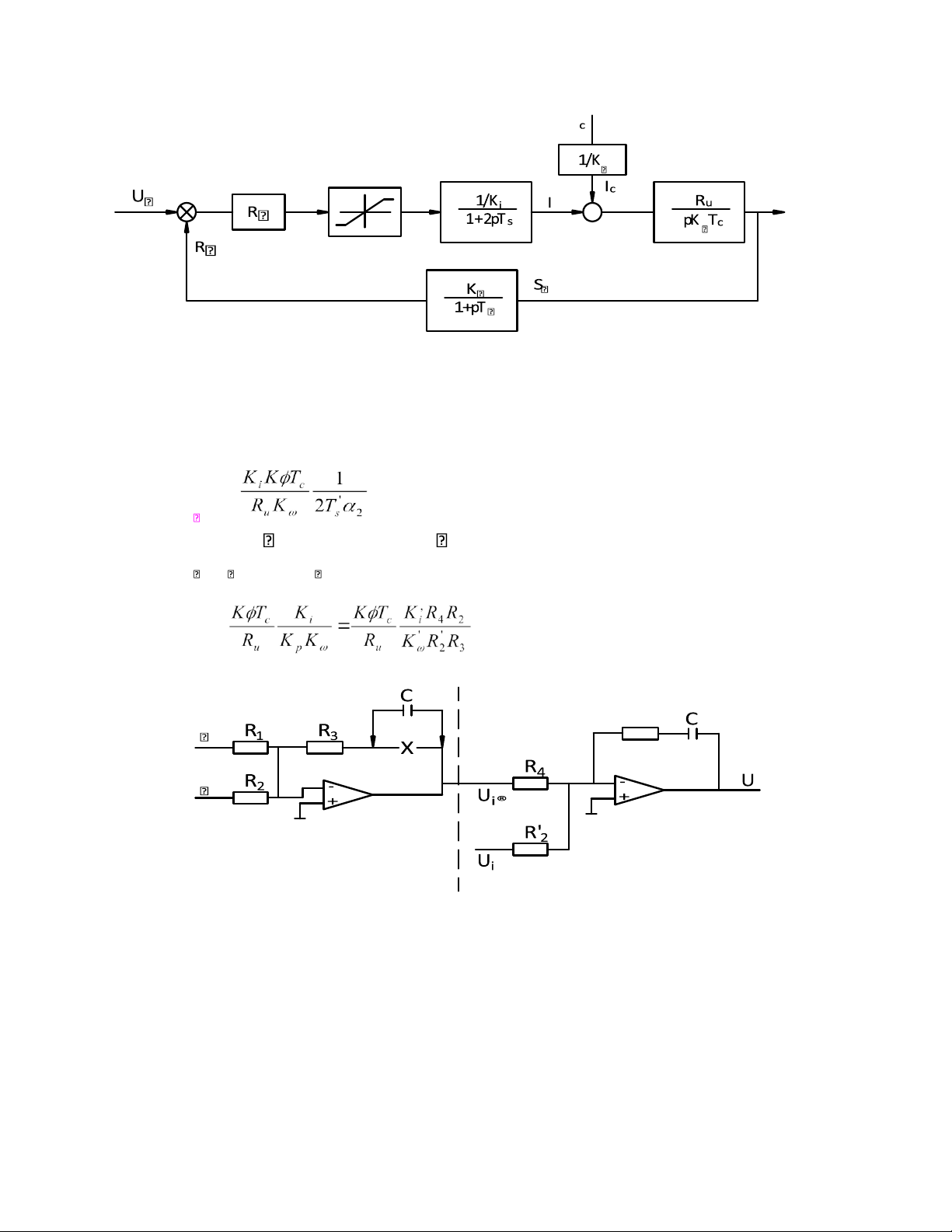
Sơ đồ cấu trúc của hệ điều chỉnh tốc độ biểu diễn trên hình 4.12 trong đó Sw
là sensơ đo tốc độ có hàm truyền là khâu quán tính với hệ số truyền K , hằng số thời
gian T , thường T có giá trị nhỏ và ta đặt 2Ts’=2Ts+T vậy đối tượng có hàm truyền: F02(p)= (4.24) lOMoAR cPSD| 59421307 M d
H. 4.12: Sơ đồ khối hệ điều chỉnh tốc độ
Chọn theo tiêu chuẩn mô đun tối ưu, được hàm truyền của bộ điều chỉnh tốc độ là khâu tỷ lệ: R (p)= =Kp (4.25)
Trong đó 2 thường có giá trị 2=2; Kp=R3/R1,
K =K ’R1/R2 (K ’-là hệ số truyền của bản thân sensơ tốc độ); 4 T’ s =
Ở đ ây R , R 2 , R 3 , R 4 , R 2 ’- là đ iện trở của mạch bộ đ iều chỉnh loại P hình 4.13 d
Hình 4.13 Cấu trúc của bộ điều chỉnh
Ki=Ki’R4/R2’ (K’i-hệ số truyền của bản thân sensơ dòng điện) 1 U lOMoAR cPSD| 59421307 U ®k
Hàm truyền mạch vòng điều chỉnh tốc độ là: (4.26)
4.4.2 Hệ thống điều chỉnh tốc độ dùng bộ điều chỉnh PI
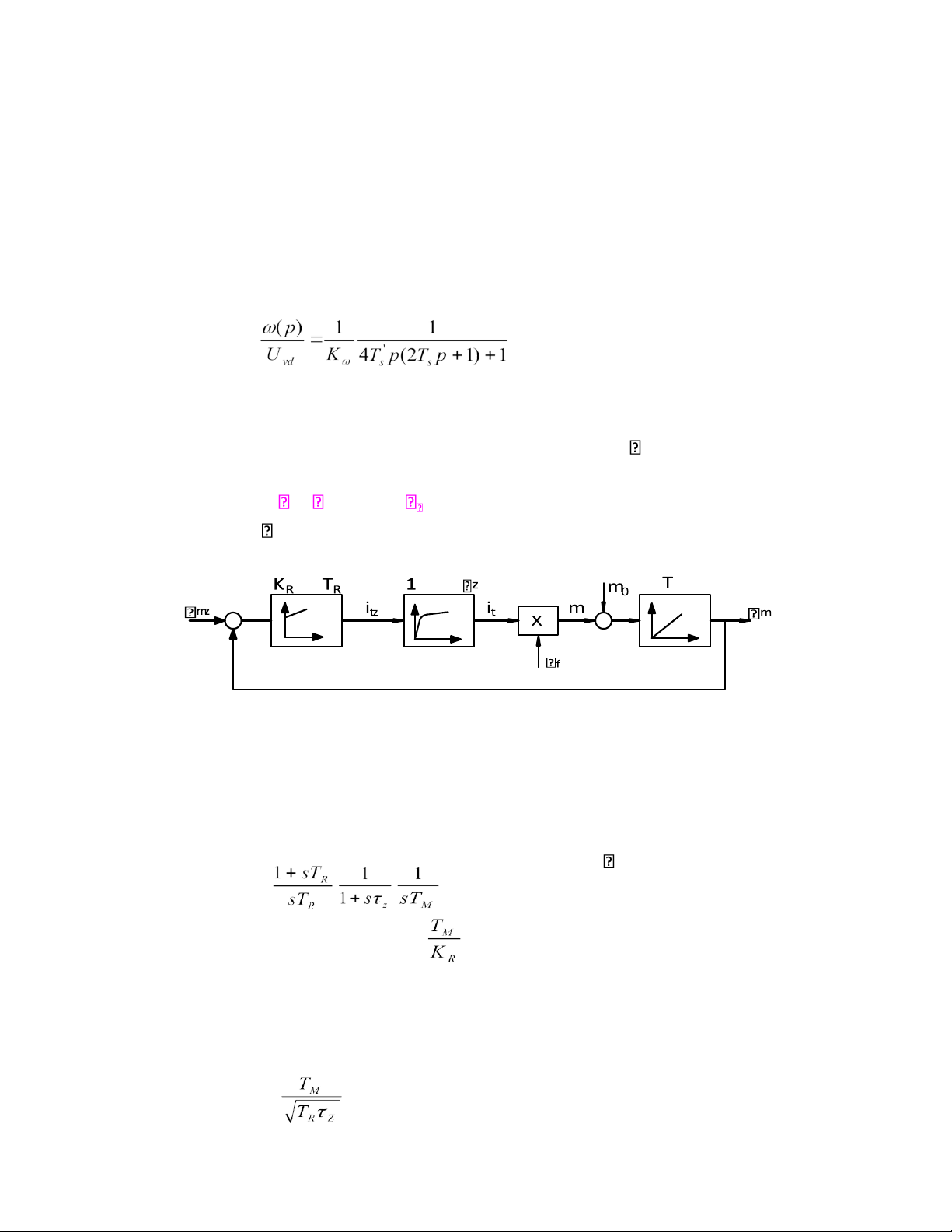
Có một sơ đồ khối đơn giản mạch điều chỉnh tốc độ h.4.14, gồm PI (KR,TR),
thiết bị đo có hệ số khuyếch đại bằng 1 và hằng số thời gian z, theo chỉ tiêu đối xứng có giá trị như sau: z = ’z +Tn = 2 i +Tn (4.27)
Trong đó ’z là hằng số thời gian tương đương của mạch kín điều chỉnh dòng
điện, Tn -là hằng số thời gian hệ thống đo tốc độ (lọc điện áp máy phát tốc). M
H. 4.14 Sơ đồ khối mạch điều chỉnh tốc độ
Tối ưu của mạch điều khiển được lựa chọn theo chỉ tiêu đối xứng. Nếu từ
thông kích từ f =1 thì hàm truyền của hệ hở có dạng: G0(s) = KR(4.30) T D = Và (4.31)
Từ biểu thức (4.29) và (4.31) ta nhận được hệ số khuyếch đại khi thực hiện
chọn bộ điều chỉnh theo chỉ tiêu đối xứng: KR =TM/TD (4.32) Hoặc KR = (4.33) lOMoAR cPSD| 59421307
Nếu lựa chọn hệ số khuyếch đại KR theo các biểu thức trên khi cho trước hằng
số thời gian z, sẽ nhận được đặc tính động chỉ phụ thuộc vào hằng số thời gian TR của bộ điều tốc.
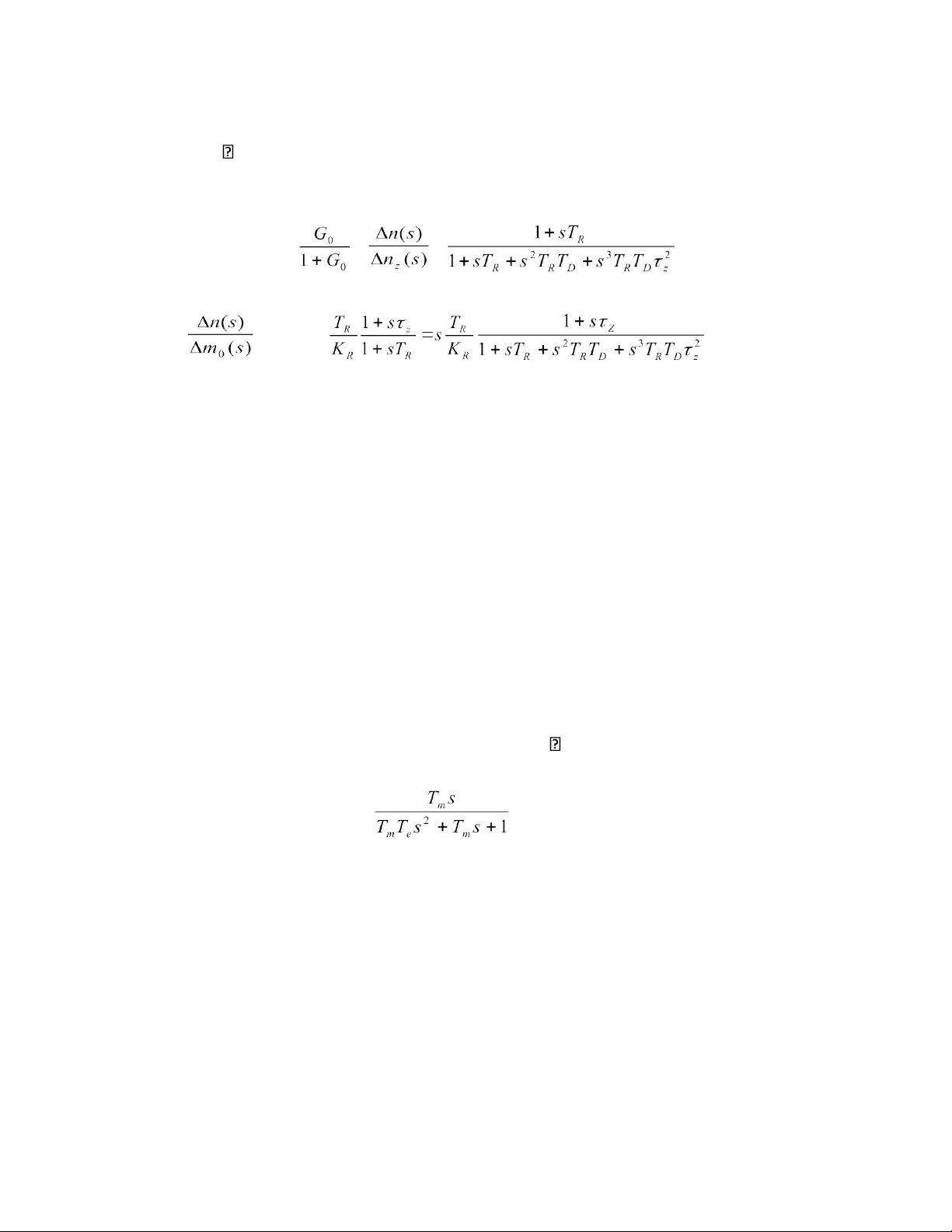
Hàm truyền của hệ kín đối với tín hiệu điều khiển biểu diễn bởi biểu thức: = = Gd(s) = (4.34)
Còn hàm truyền tính theo nhiễu : = Gd(s)s Gzn(s) = (4.35)
4.5. Một số hệ thống điều khiển truyền động điện động cơ điện một
chiều-bộ biến đổi.(đọc)
4.5.6 Bộ điều chỉnh thích nghi dòng điện
Chuyển từ chế độ liên tục sang chế độ dòng không liên tục làm thay đổi hàm
truyền dòng rô to và cấu trúc của đối tượng. Để nhận được sự liên tục của dòng trong
toàn bộ phạm vi điều chỉnh tốc độ, dùng cuộn cản có L từ lớn.
Trong các bộ biến đổi 2 chiều không có dòng cân bằng rất khó nhận được dòng
liên tục khi dòng tải nhỏ. Không thể tăng quá mức L của cuộn kháng trong mạch katôt,
vì giảm chất lượng của quá trình điều chỉnh dòng điện. Để đảm bảo chỉ số chất lượng
điều chỉnh const trong chế độ dòng liên tục và không liên tục, sử dụng bộ điều chỉnh
thích nghi dòng điện. Đơn giản nhất để được bộ điều chỉnh thích nghi dòng là sử dụng
bộ điều chỉnh có cấu trúc thay đổi PI/I. Từ kết quả của phân tích sau đây ta thấy cần
thiết phải sử dụng bộ điều chỉnh có cấu trúc thay đổi.
Thực vậy khi bỏ qua ảnh hưởng của độ trễ 0 , hàm truyền của dòng tải có thể biểu diễn: GI(s) = K1 (4.49)
Vì thông thường TM>>Te, vậy ta có thể bỏ qua ảnh hưởng của phản hồi sđđ lên đặc
tính dòng điện và nghiên cứu hàm truyền dòng điện khi động cơ bị dừng, ta có: lOMoAR cPSD| 59421307 GI(s) = (4.50 )
Ta cũng sẽ nhận được kết quả như vậy khi cho TM rồi đem chia tử và mẫu số của (4.49) cho TM.
Nếu bộ điều chỉnh dòng điện là PI, hàm truyền cho hệ hở của mạch điều chỉnh
dòng điện ở chế độ liên tục như sau: GI(s) = (4.51) Đặt Ti=Te lúc đó: GI(s) = (4.52) GI(s) = (4.53)
khi dòng không liên tục thì hàm truyền của dòng rô to có dạng: Với K2 GI(s) =K2 (4.54)
Giả thiết đặc tính tần số của mạch điều chỉnh dòng rô to không đổi khi chuyển
từ chế độ dòng liên tục sang không liên tục, ta nhận được: =K2GR(s) (4.55)
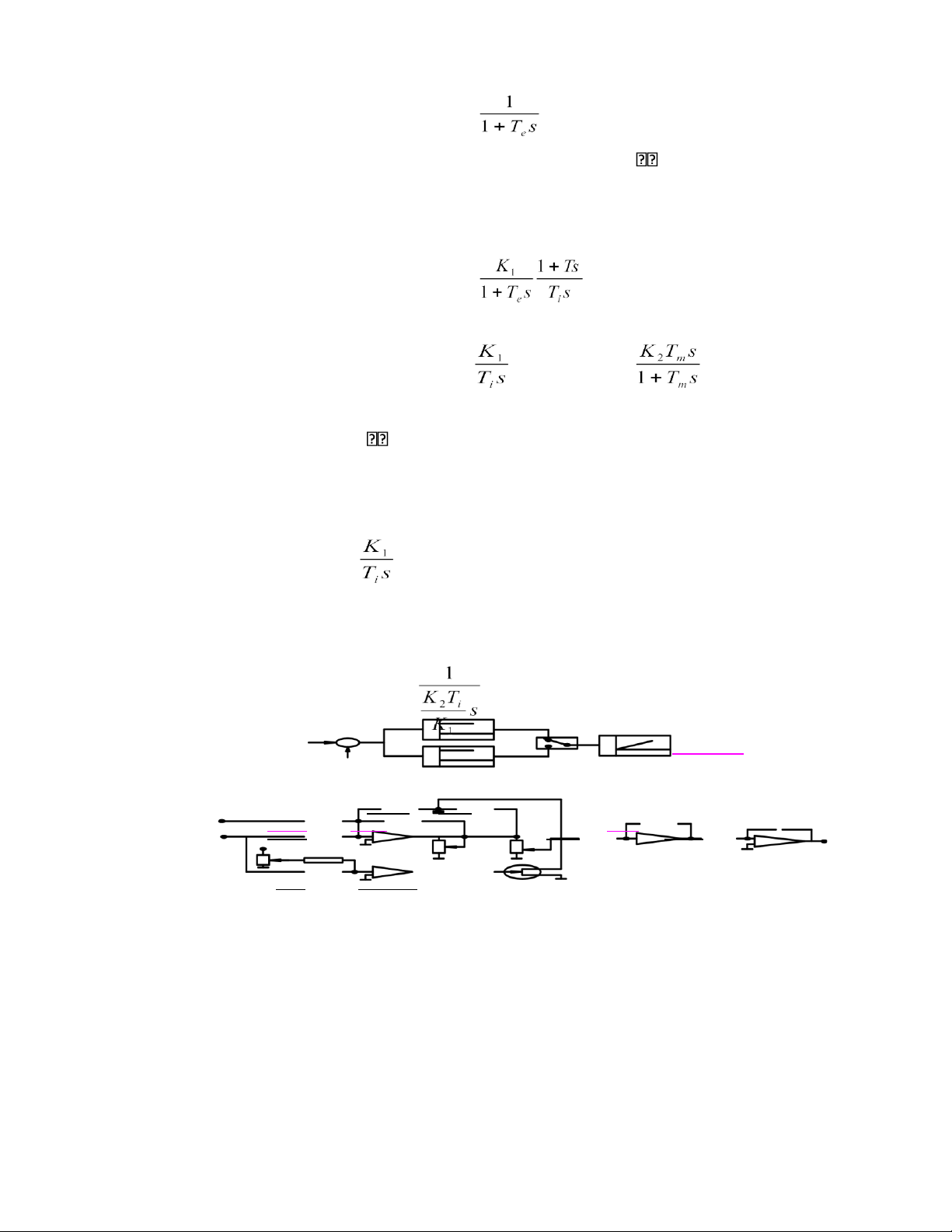
Do đó hàm truyền của bộ điều chỉnh dòng điện GR(s) cho vùng dẫn không liên tục có dạng: GR(s)= (4.56) P W I
Kết luận : Chuyển cấu trúc từ PI sang I khi dẫn dòng liên tụcI sang dẫn dòng không z I -
liên tục thì chỉ số chất la)ượng điều chỉnh không bị thay PD đổi. Ở h.4.23 là ví dụ bộ điều
chỉnh PI/I. Khi mắc nối tiếp khâu PI với khâu I ta nhận được bộ điều chỉnh có cấu trúc
PI, ngưIợc lại kh i nối tiếp khâu I với khâu P ta được bộ điều chỉnh loại z I 1 3 4 b) 2 5
4.6. Các hệ thống điều khiển thích nghi động cơ một chiều
Downloaded by Quoc Khai (quockhai36@gmail.com)
H. 4.23: Bộ điều chỉnh thích nghi dòng điện rô to hệ thống truyền động điện 130
bộ biến đổi ti-ri-sto, không dòng cân bằng; a) Sơ đồ khối, b) Hệ thống dùng
khuyếch đại thuật toán
Có 3 thông số đặc trưng của mạch điều tốc: hằng số thời gian tương đương của
mạch điều chỉnh dòng rô to z,- hằng số thời gian cơ khí TM , - từ thông kích từ f .
Các thông số này đều có thể thay đổi, tạo nên sự không phù hợp và giảm tính
chất động của hệ thống khi sử dụng bộ điều tốc truyền thống.
Việc lựa chọn bộ điều tốc PI theo tiêu chuẩn tối ưu hoặc đối xứng phải dựa
vào các thông số TM, z, và f.
Để tính chất động của hệ thông không đổi theo yêu cầu, cần thiết phải thay
đổi hệ số khuyếch đại và hằng số thời gian bộ điều tốc TR.
Trong các hệ thống truyền động điện (TĐĐ) dùng động cơ kích từ độc lập,
người ta sử dụng hệ thống điều khiển thích nghi với mô hình có thông số không đổi
(trực tiếp) và mô hình có thông số biến đổi (gián tiếp).
4.6.1 Hệ thống thích nghi trực tiếp với mô hình chuẩn.
-Nhiệm vụ cơ bản của hệ thống thích nghi với mô hình so sánh là phải thay đổi
bộ điều chỉnh, sao cho sai số chung độc lập với các thông số của đối tượng và phải tiến tới ze ro.
-Thuật giải thích nghi, nhận tín hiệu từ đối tượng điều khiển, từ mô hình chuẩn
và từ sai số chung rồi tác động lên bộ điều chỉnh .
Vì thế vấn đề cơ bản thực hiện hệ thích nghi là tổng hợp thuật giải thích nghi.
Những phương pháp chủ yếu được sử dụng để tổng hợp thuật giải
- Phương pháp dựa trên lý thuyết ổn định (chung)
- Phương pháp điều khiển tối ưu
- Phương pháp tối ưu thông số (địa phương)
Phương pháp dựa trên lý thuyết điều khiển tối ưu, được sử dụng chủ yếu cho
các hệ thống thích nghi với mô hình trong đó có sử dụng tín hiệu thử.
Phương pháp có hiệu quả hơn cả, để tổng hợp các hệ thống thích nghi, là phương pháp tối ưu tham số.
Trong tính toán, phương pháp này chủ yếu dùng phương pháp gradien và Newton.
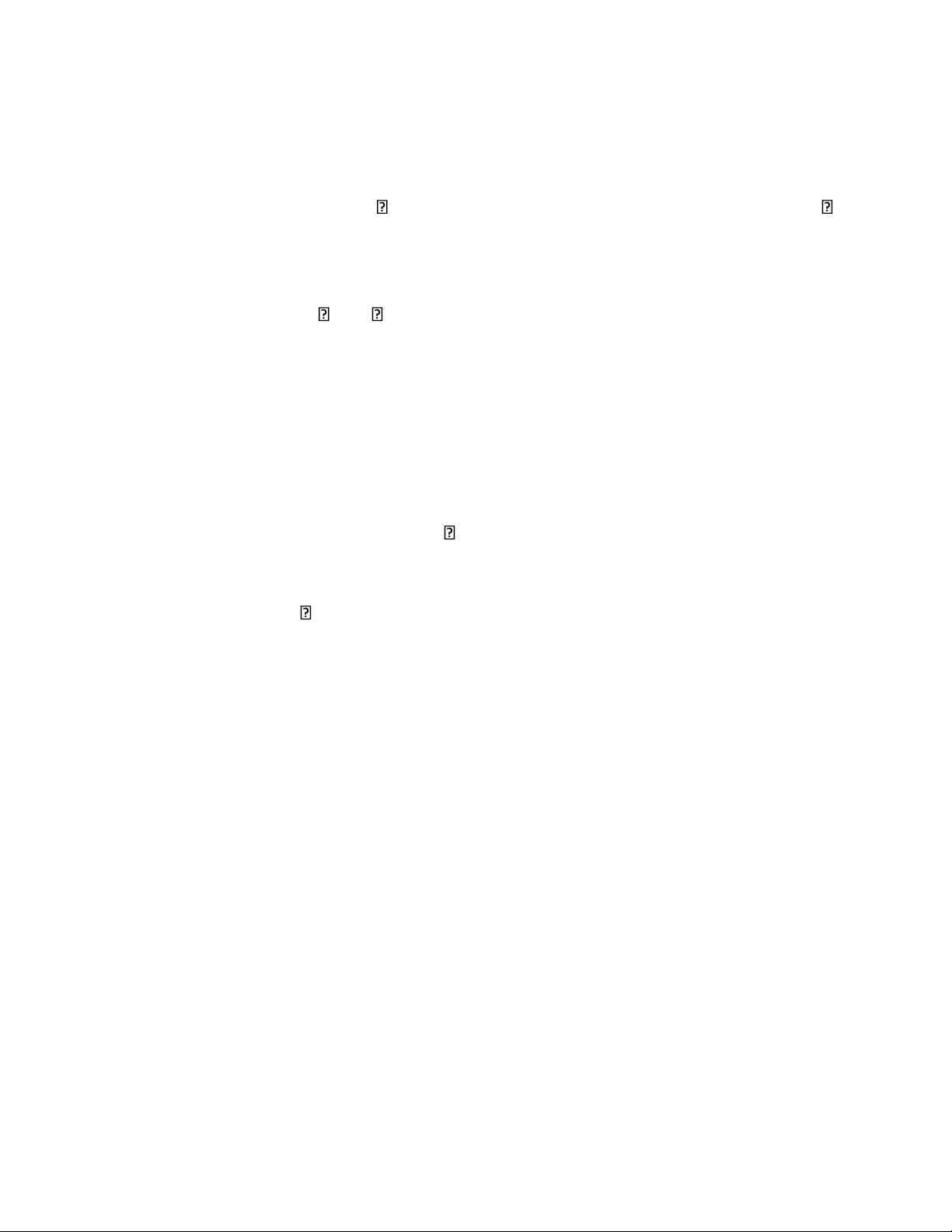
Chúng ta nhận hệ thống biểu diễn trên h.4.24. Đó là Sơ đồ khối hệ thống thích
nghi đa biến với mô hình mẫu
H. 4.24: Sơ đồ khối hệ thống thích nghi đa biến với mô hình mẫu b’skl(t) = klul (4.67)
4.6.2.Tổng hợp hệ điều chỉnh thích nghi tốc độ .(đọc)
4.6.3 Hệ thống thích nghi gián tiếp với mô hình thay đổi.
Hệ thống được sử dụng để nhận dạng mô hình thích nghi, mô hình này theo
dõi các thông số của quá trình điều khiển. Những thông số này được sử dụng để điều
khiển tức thời các thông số đặt của bộ điều tốc thích nghi. Như vậy nhiệm vụ cơ bản
của hệ thống, là tổng hợp thuật toán nhận dạng. Có nhiều phương pháp dùng để tổng
hợp thuật toán. Hay dùng nhất là phương pháp cân bằng sai số tổng (equation error
method) sau đó dùng tổng hợp hệ thống TĐĐ. Ta nghiên cứu quá trình mô tả bằng phương trình: =u+ (4.75)
trong đó u = u(t) là tín hiệu cưỡng bức, y =y(t) - là tín hiệu đáp ứng, còn an,
bm là M+N+1 các hệ số chưa biết thay đổi theo thời gian. Ta ký hiệu: (4.76) , u y n = m = Ta nhận được: (4.77) =u+ Hoặcc dạng véc tơ: a =u (4.78) 0 Trong đó
= [y0, y1,......yN, u1, u2,...,uM]
(4.79) aT =[a0, a1,......aN, -b1, -b2,...,-bM] (4.79b)
trong thực tế, việc đo tín hiệu vào và ra bị nhiễu bởi các tín hiệu đáp ứng z1
và z2 . Tổng quát, các đại lượng này là những đại lượng ngẫu nhiên: Y = HYA+Z2 (4.80) v = u0+z1 (4.80)
trong đó H -ma tận quan sát có kích thước jx(m+n+1), y= [y0,y1,....yj -1 ]T,j - bậc của véc tơ.
Khi quan sát y và v cần phải dự báo véc tơ a. Chúng ta đưa ra khái niệm mô
hình dự báo. Đây là mô có các phương trình vi phân giống với phương trình vi phân
của quá trình nhận dạng, nhưng mô hình được thực hiện bằng cách không sử dụng
những khâu đạo hàm lý tưởng, và có các hệ số của chúng là các thông số dự báo. Vì
vậy ở lối vào và ra của quá trình được dùng một fil lọc có hàm truyền như sau: Fi(s)= (4.81)
Hàm truyền này bao gồm các đa thức có bậc lớn hơn hoặc bằng n, nên cho
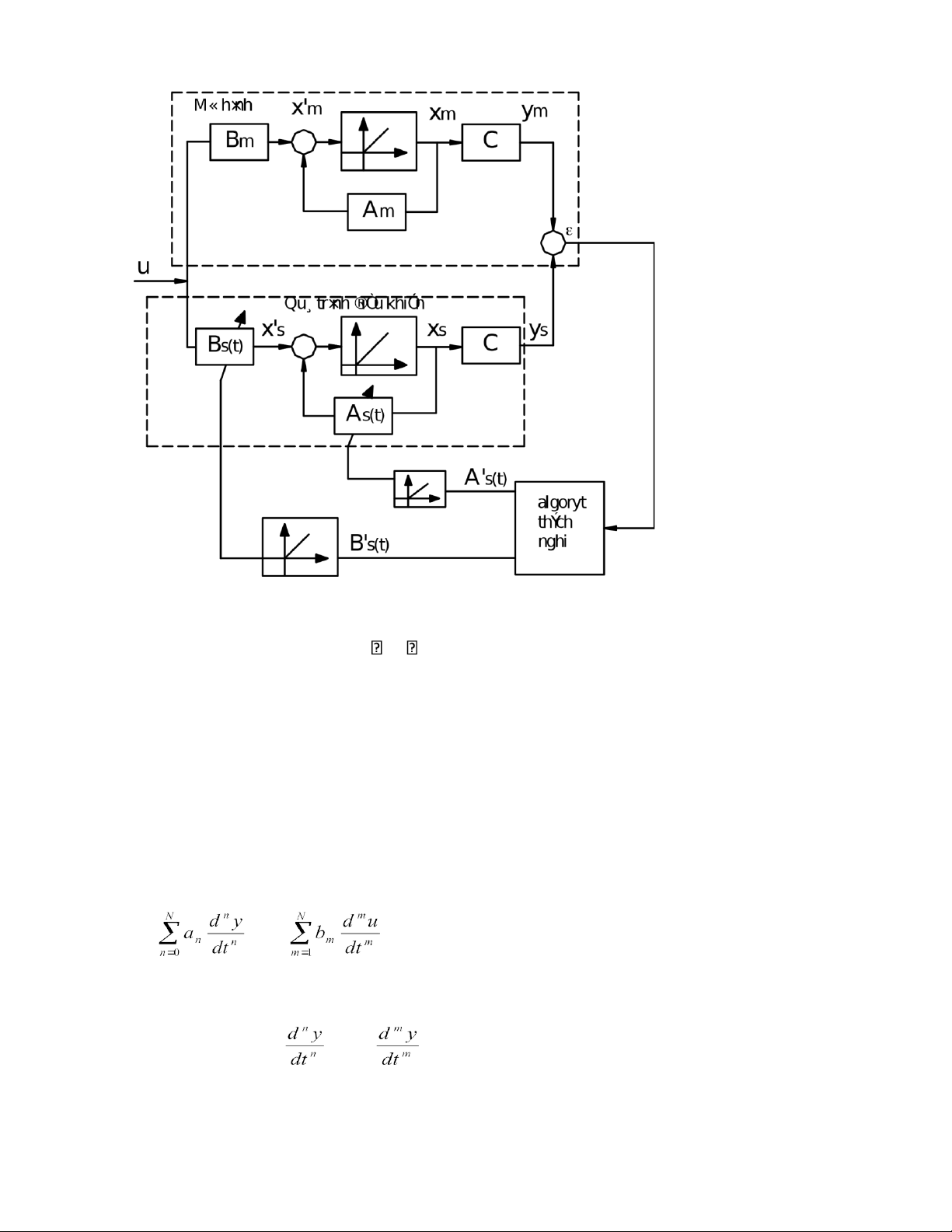
phép nhận được đạo hàm bậc 1 i n ở lối ra của bộ lọc. h.4.27 Z 0 1 Quá trình Y A T = u 0 -
H. 4.27: Dự báo véc tơ a bằng phương pháp cân bằng sai số Nếu
quá trình là đơn biến sẽ có:
H = [1, 0, 0,......0], Y0=y0+Z02, v=u0+Z1 Ta có (4.82)
phương trình mô hình dự báo như sau: (4.83) = Fi(s)v + Hoặc véc tơ ở dạng (4.84) CT = w Trong đó:
CT = [Fi(s)Y0...siFi(s)Y0, snFi(s)Y0, sFi(s)v,......siFi(s)v...smFi(s)v] (4.85) w =Fi(s)v ,
là véc tơ các thông số dự báo.
Hàm sai số tổng quát có dạng: i = CT - wi (4.86)
Từ (4.86) có thể xác định được giá trị dự báo â, giá trị này sẽ làm tối thiểu hóa
sai số tổng. Để xác định sai số tổng có thể dùng phương pháp bình phương nhỏ nhất
cho hệ thống không liên tục, hoặc phương pháp bình phương trung bình cho hệ thống liên tục.
4.6.4.Tổng hợp bộ điều chỉnh thích nghi tốc độ theo mô hình dự báo.
Để giữ cho đặc tính động của mạch điều tốc khi thay đổi hằng số thời gian điện
cơ TM hoặc từ thông f không đổi, đòi hỏi phải thay đổi hệ số khuyếch đại bộ điều tốc: KR = KR0 1 (4.87)
trong đó 1=TM/ f, KR0 là giá trị đầu của hệ số khuyếch đại bộ điều chỉnh thích nghi PI.
Nhiệm vụ của ta là phải xác định hệ số dự báo
, để làm thay đổi hệ số
khuyếch đại 1 của đối tượng trên cơ sở quan sát tín hiệu vào it(t) và ra m(t) bị nhiễu
bởi mômen cản m0(t). Theo ký hiệu từ h.4.27 phương trình mô tả quá trình có dạng: , u a 0 = i t 1y1 = u0 (4.88) trong đó a1 = = 1, y1 = (4.89)
Ở dạng véc tơ theo (4.78) ta có: = it (4.90) Nhận H =[1,0] Z2 = 0, Z1 = (4.91) 1 Y0 =y0+Z2 = m, v =u0 +Z1=i + (4.92)
với các bộ lọc có fi(s) = 1/(1+s), thì phương trình mô hình dự báo theo (4.86) có dạng: CTâ = w (4.93) (4.94) Trong đó CT = s m, â = 1, w = i t+
sai số chung có thể biểu diễn: (4.95) m -[ s i t+ = s ]
vì ký hiệu s m = d m /dt, đem thay vào biểu thức (4.92) ta có : (4.95a) s m = it .
vậy biểu thức (4.95) có dạng: i t( -1) - (4.96 ) =
Thuật toán thích nghi với mô hình dự báo có thể tính bằng phương pháp gradien
từ điều kiện tối ưu của biểu thức: I = (4.97)
Ban đầu giả thiết m0 = 0 ta nhận được: = =2 (4.8)
Trong đó là hệ số khuyếch đại trong kênh thích nghi, còn - được tính
bằng cách lấy đạo hàm biểu thức (4.96) = = (4.99 )
cuối cùng thuật toán chọn có dạng: =2 m (4.100)
kết quả điều khiển thích nghi ta được: ( 0 ) ( ) (4.101)
Lưu ý rằng khi m0 0 thì sai số không đạt giá trị ze-ro, nhưng do điều khiển thích nghi để khi
=TM/ f thì sai số có giá trị: =- 0 =- 4.102 )
Để cho sai số đạt giá trị ze ro cần phải trừ đi một đại lượng M = 0 - M (4.103)
Khi M = 0 thì =0. Có thể đạt được bằng tích phân sai số và trừ đi 0 tức là: = 0 - (4.104) Cho t ta có: ( ) = lims (s) s 0 từ
(4.104) ta thay sai số 0, còn từ (4.95a) ta có: M = - (4.105) giá trị dự
báo được dùng để chọn bộ điều chỉnh thích nghi tốc độ có KR thay
đổi theo (4.75). Như vậy xuất hiện một hệ thống thích nghi
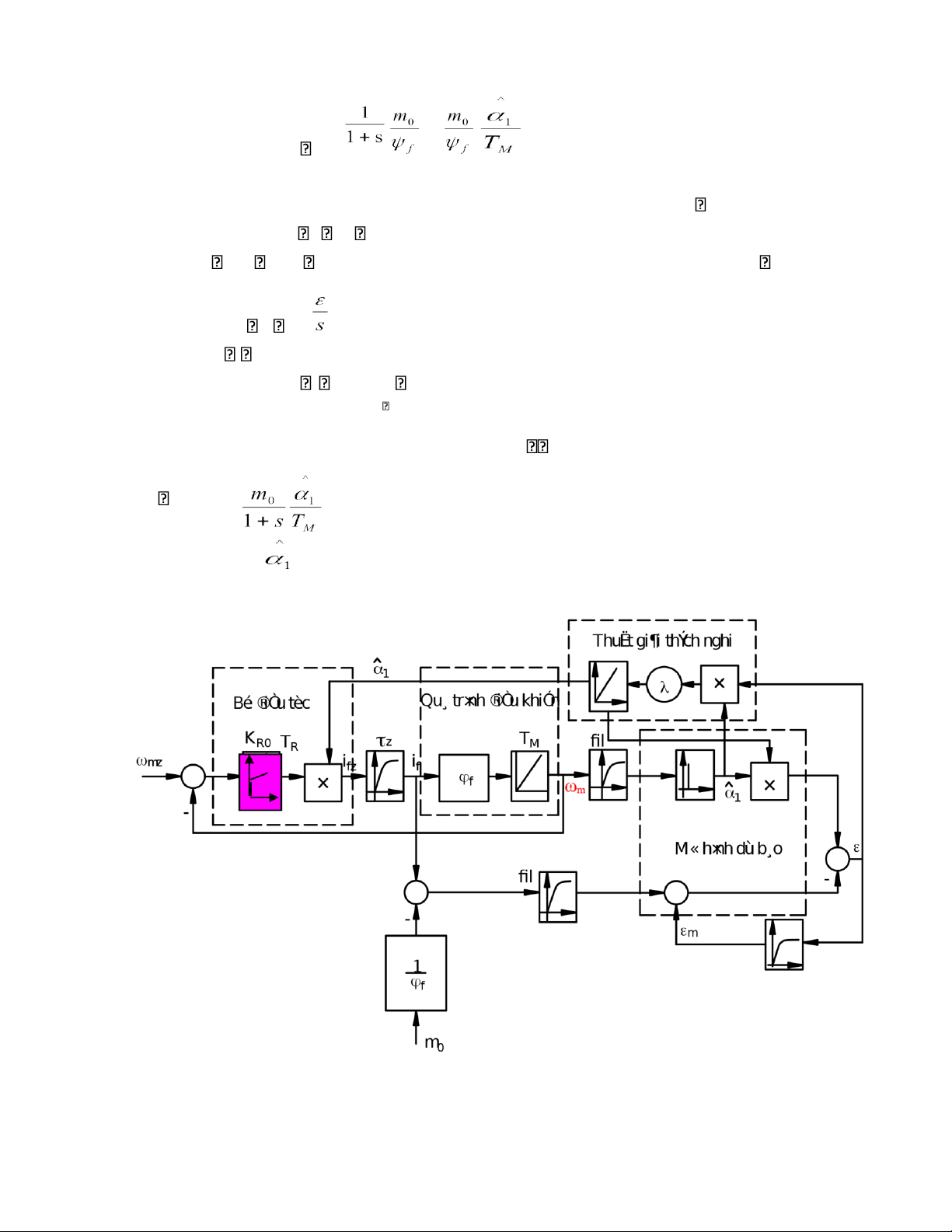
trung gian với mô hình biểu diễn trên H.4.28
H. 4.28: Sơ đồ khối hệ TĐĐ bộ biến đổi với hệ thống thích nghi
Tài liệu liên quan:
-

Phương trình đường cầu và cung theo giá: BT KTVM1 Guide
1 1 -

CTDT DIEN 1 - EE1 Program Final Exam Overview and Objectives
9 5 -

Trắc Nghiệm Phóng Chiếu Rorschach: Phân Tích và Ứng Dụng Tâm Lý
10 5 -

Hướng Dẫn Sử Dụng SPSS Trong Phân Tích Định Lượng HD-231
10 5 -

Bài Tập PLC S7 1200: Hướng Dẫn Giải và Thực Hành FBD
15 8