bài lý thuyết về điều khiển hiện đaik
hay đây đủ
Môn: Thương mại điện tử căn bản 90 tài liệu
Trường: Trường Đại học Kinh Tế Quốc Dân 8.8 K tài liệu
Tác giả:
Preview text:
ÔN TẬP MÔ PHỎNG
Dùng matlab R2023a muốn mở file phải dùng bản mới hơn bản nay.
Ví dụ 1: Điều khiển LQR
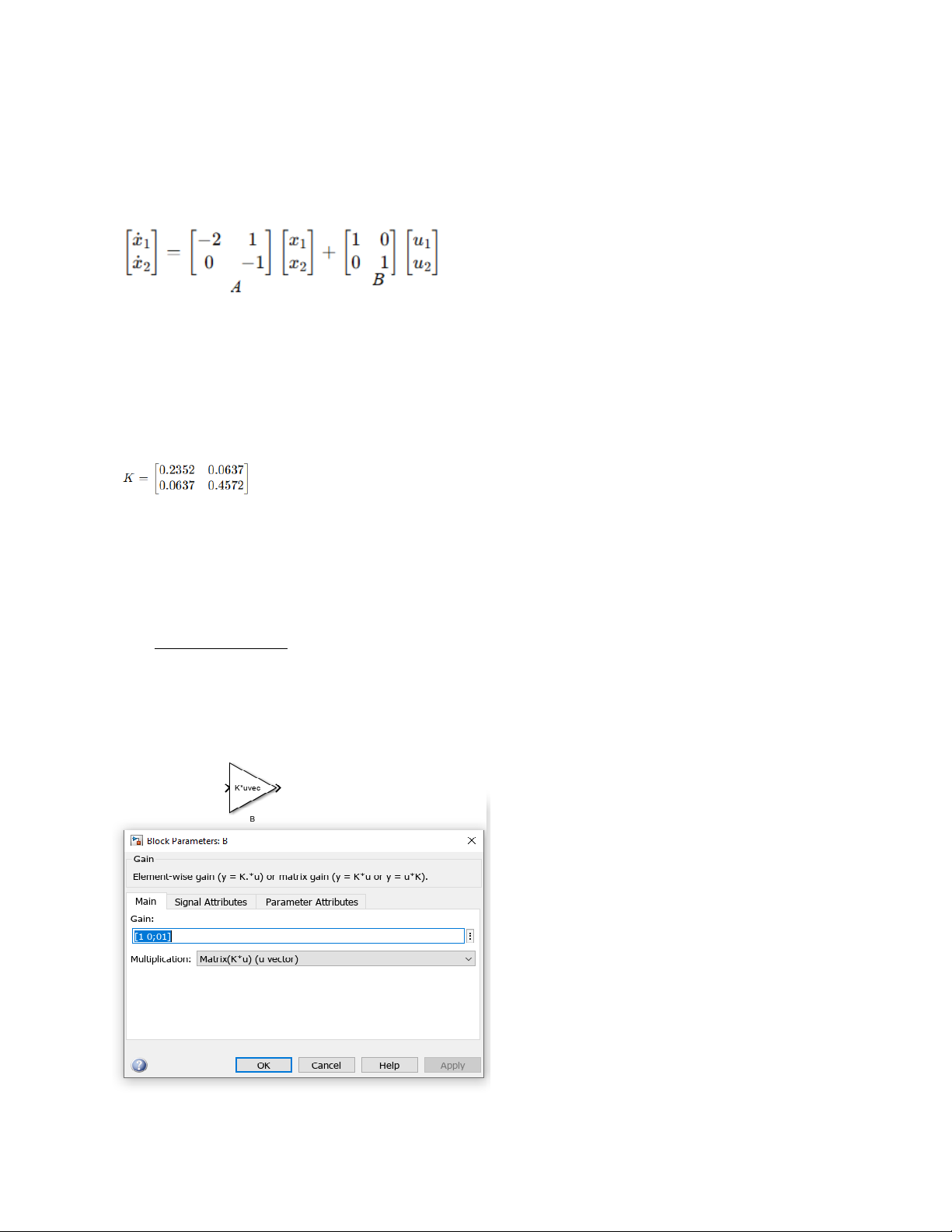
Cho phương trình trạng thái hệ MIMO hai đầu vào hai đầu ra 1 0 C = . 0 1 1 k 1 1 k 2
Sau khi tìm được bộ điều khiển LQR có dạng u x 1 1 u = −K , x = − u x 2 k 21 k22 2 Giả sử.
0.2352 0.0637 x 1 u = − 0.0637 0.4572 x 2
Ma trận tham chiếu N được tính như sau: Sử dụng matlab tính
( không viết vào bài ở chương 2 khi nào mô phỏng mới nhân vào đầu vào) −1 − − − N = − = − = - C ( A BK ) 1 1 2.2352 0.9363 B
C ( A − BK ) 1 B 0.0637 1.4572
Khi mô phỏng nhân với ma trận tham chiếu vào đầu vào mô phỏng.
File matlab mẫu tham khảo: lqr_mophong Vào tham số
Tương tự ma trận, A,B,K,N tính xong vào tham số như trên.
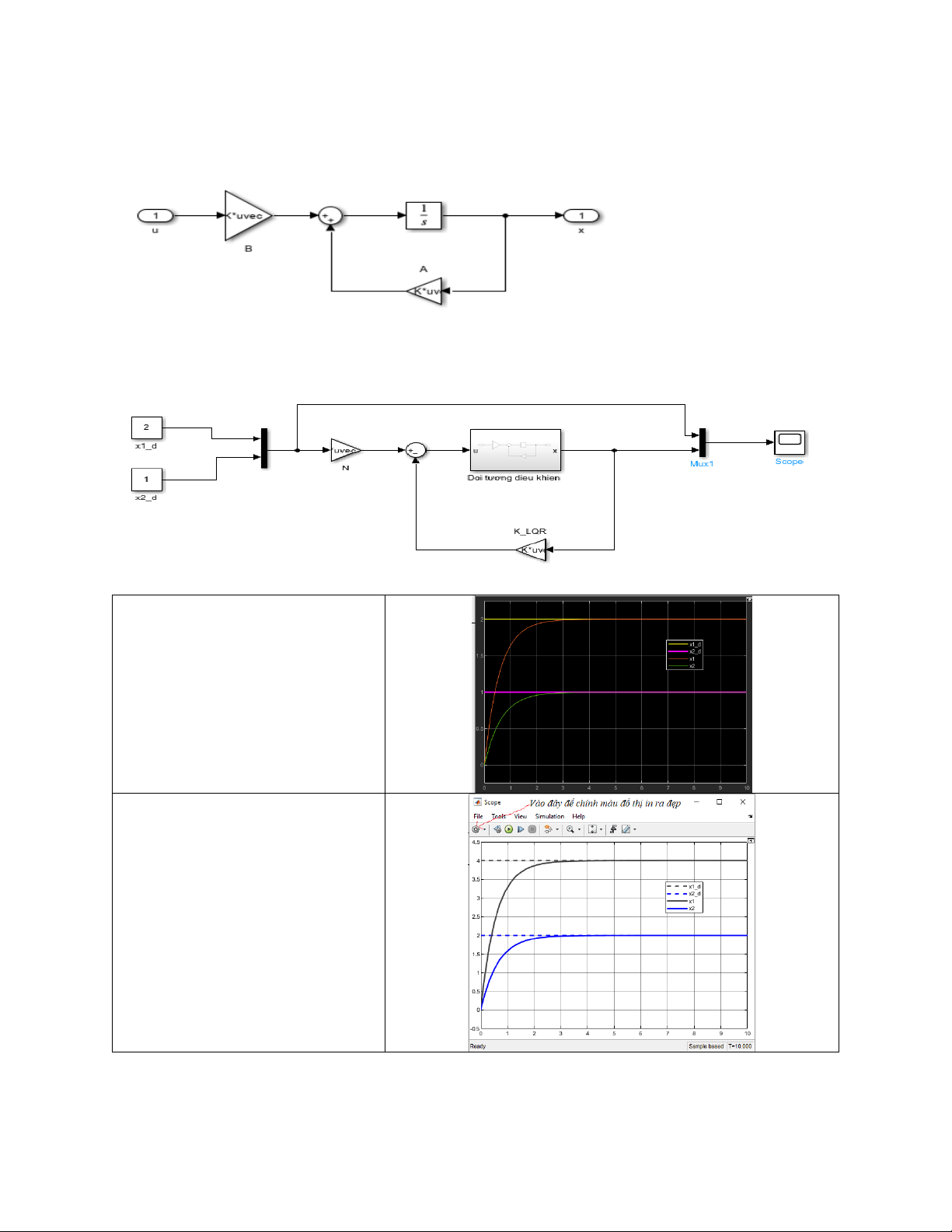
Sơ đồ matlab đối tượng điều khiển:
Sơ đồ hệ thống điều khiển:
Kết quả mô phỏng tín hiệu đặt d
x x _ d 2 1 1 x = = = d d
x x _d 1 1 2 d
x x _ d 4 1 1 x = = = d d
x x _d 2 1 2
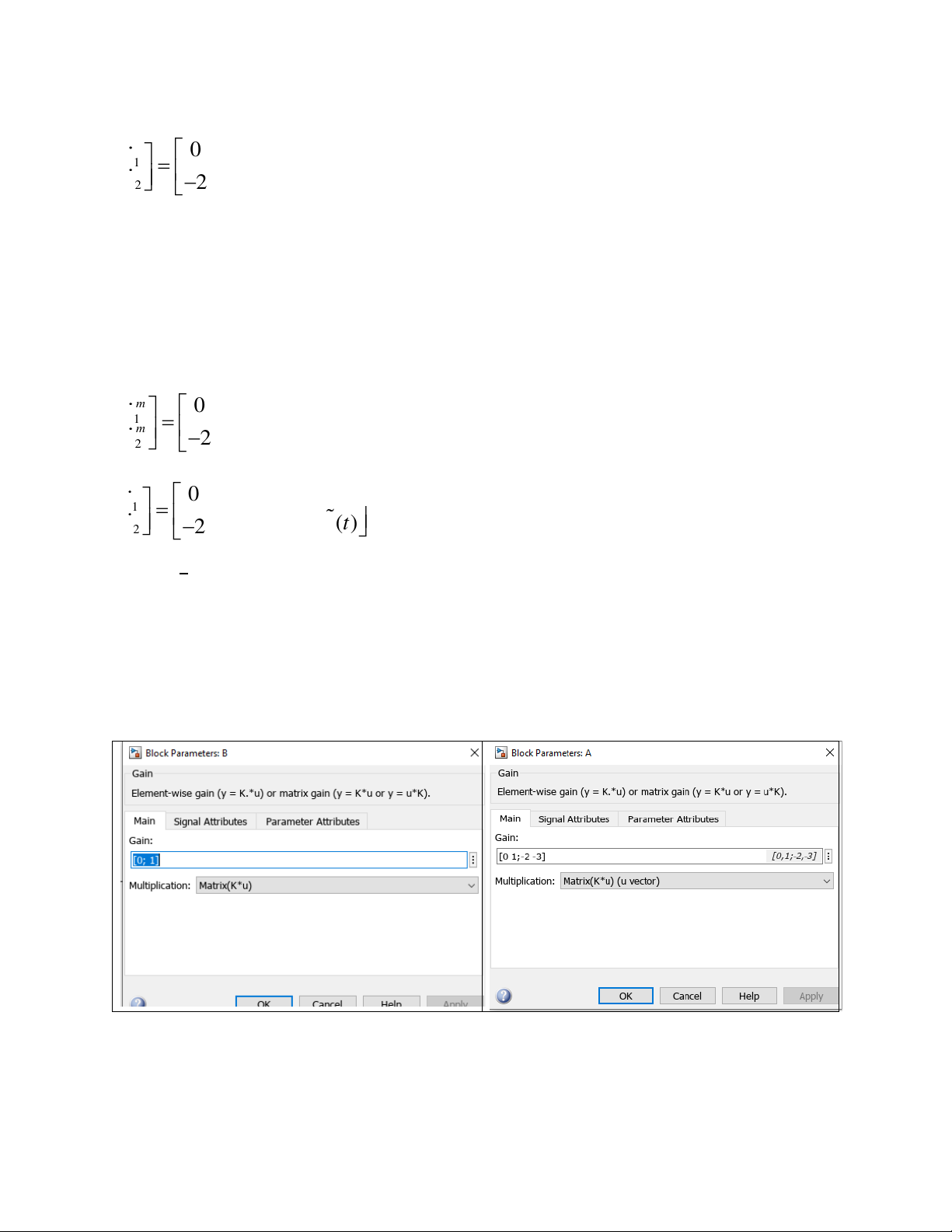
Ví dụ 2: Điều khiển đăt cực và thích nghi hệ bậc 2 SISO 0 1 x x 0 0 1 1 = + u + (1) x − − x 1 d(t) 2 2 3 2 C = 1 0.
Bộ điều khiển thích nghi u = u + u 1 TN
Sử dụng phương pháp đặt cực cho phần tuyến tính x u = −K , x u = − 1 k k 2 1 , 1 1 x 2
Giả sử tìm được ma trận K bằng phương pháp đặt cực K=[4 2].
Thích nghi sử dụng mô hình m 0 1 m x x 0 0 1 1 = + u + (2) m m − − ˆ x x 1 2 3 d(t) 2 2
Lấy (1)-(2) được mô hình sai số: 0 1 e e 0 1 1 = + e − − 2 3
e d(t) 2 2 1 u
= − ( p e + p e )dt
, chú ý 1/b=1/1 đọc trong vở. TN 21 1 22 2 1 p p 1 1
Chọn ma trận xác đinh dương 11 12 P = = p p 1 1.5 21 22 Vậy bộ điều khiển x u = u + u = − − e + e dt TN 4 2 1 ( 1.5 ) 1 1 2 x 2
File matlab mẫu tham khảo: thichnghi_bac 2 Tương tự ma trận K,P…
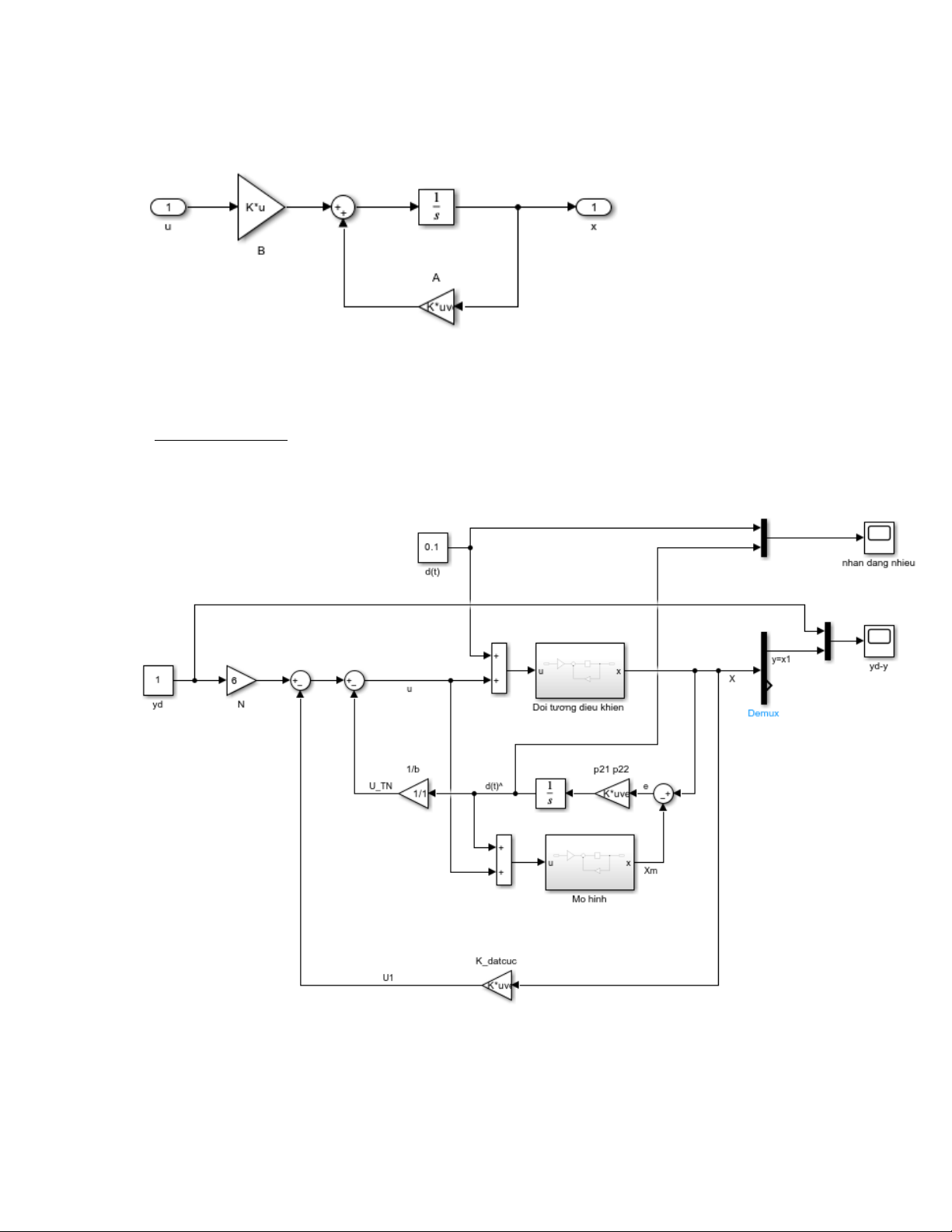
Sơ đồ đối tượng điều khiển
Sơ đồ hệ thống điều khiển thích nghi đặt cực bậc 2:
Ma trận tham chiếu N được tính như sau: Sử dụng matlab tính
( không viết vào bài ở chương 2 khi nào mô phỏng mới nhân vào đầu vào) −1 − − N = − = − = - C ( A BK ) 1 1 B 6
C ( A − BK ) 1 B
Khi mô phỏng nhân với ma trận tham chiếu vào đầu vào mô phỏng. Kết quả mô phỏng
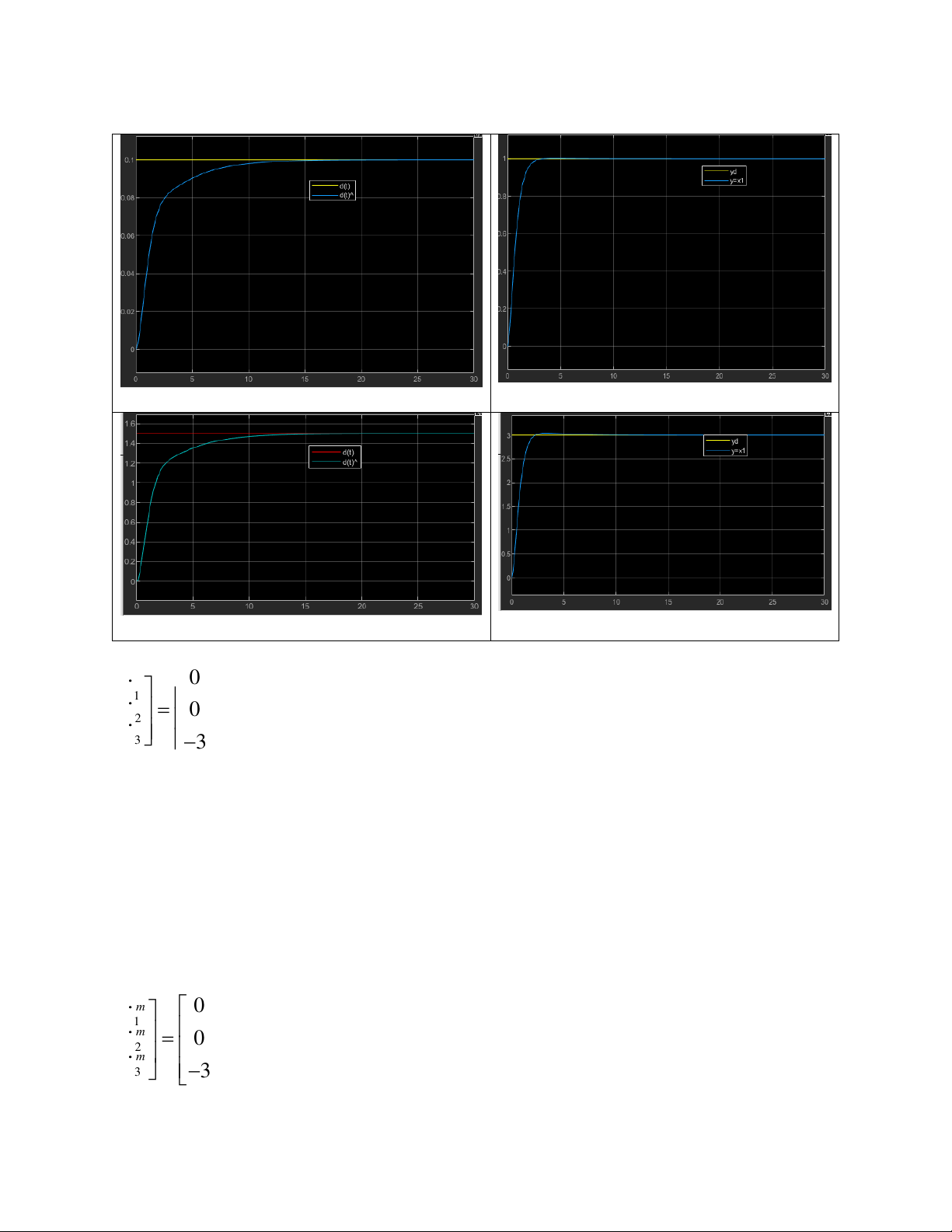
Kết quả nhận dạng nhiễu d(t)=0.1*1(t)
Kết quả bám tín hiệu đặt y = 1 d
Kết quả nhận dạng nhiễu d(t)=1.5*1(t)
Kết quả bám tín hiệu đặt y = 3 d
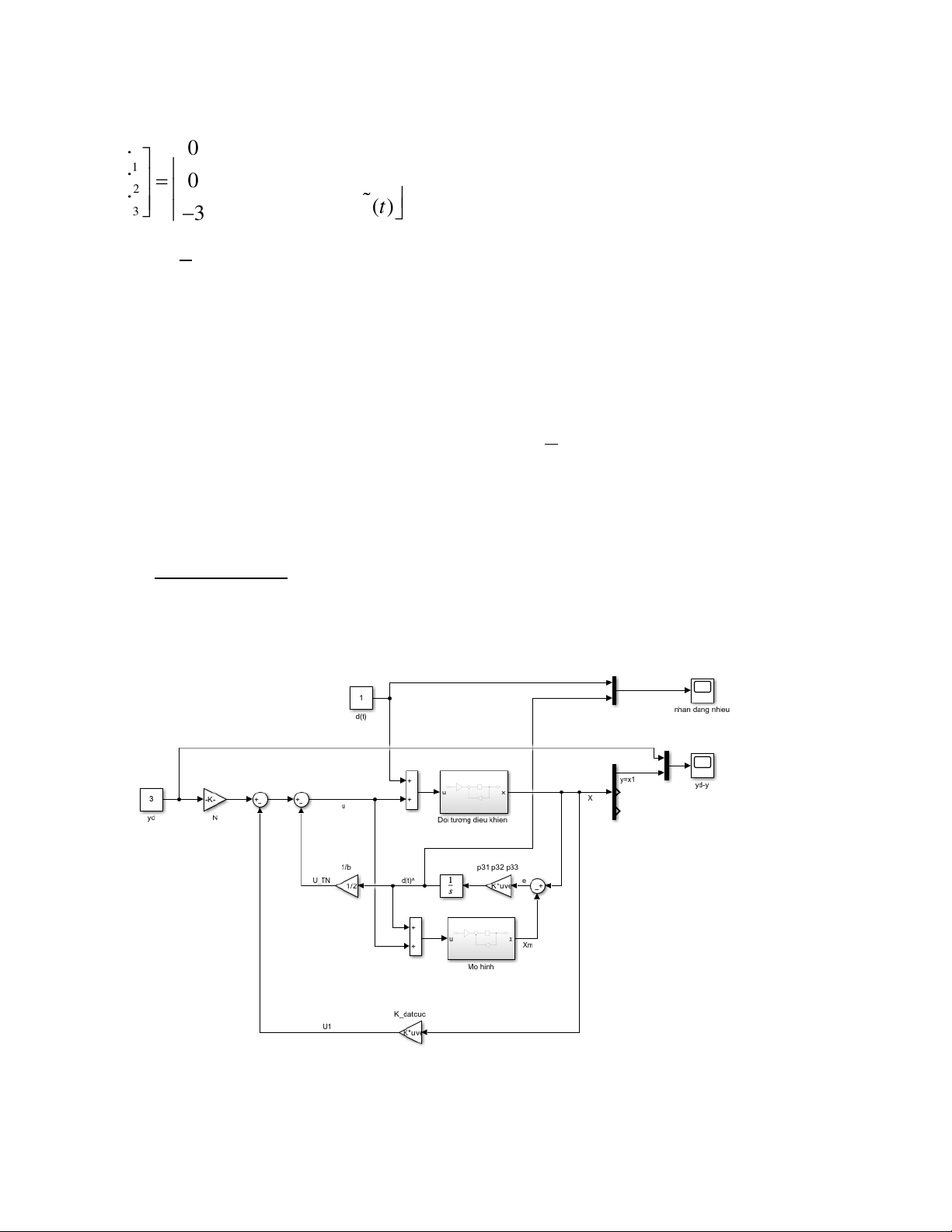
Ví dụ 3: Điều khiển đăt cực và thích nghi hệ bậc 3 SISO 0 1 0 x x 0 0 1 1 x = 0 0
1 x + 0 u + 0 (1) 2 2 x x 2 d(t)
− − − 3 3 3 2 1 C = [1 0 0].
Bộ điều khiển thích nghi u = u + u 1 TN x
Sử dụng phương pháp đặt cực cho phần tuyến tính u = −K , x u = − 1 k k 2 k 1 3 x , 1 1 2 x 3
Giả sử tìm được ma trận K bằng phương pháp đặt cực K=[51 34.5 7].
Đối với hệ bậc ba nên chọn cực nhỏ p=[-3 -5 -7].
Thích nghi sử dụng mô hình m 0 1 0 m x
x 1 1 0 0 m x = 0 0 1 m
x + 0u + 0 (2) 2 2 m m x x 2 ˆ − − − d(t) 3 3 3 2 1
Lấy (1)-(2) được mô hình sai số: 0 1 0 e e 0 1 1 e = 0 0 1 e + 0 2 2 e e
3 − − − 3 d(t) 3 2 1 1 u = −
( p e + p e + p e )dt
, chú ý 1/b=1/2 đọc trong vở. TN 31 1 32 2 33 3 2 p p p 4 2 1 11 12 13
Chọn ma trận xác đinh dương P = p p p = k * 2 3 1 21 22 23 p p p 1 1 2 31 32 33
Nếu hội tụ phần nhận dạng nhiếu chậm tăng k lên ( đầu tiên cho k=1 sau tăng lên nhần. x 1
Vậy bộ điều khiển u = u + u = − x − e + e + e dt TN 5134.5 7 1 (10 10 20 ) 1 2 1 2 3 2 x 2
Làm tương tự như ví dụ 2
Ma trận tham chiếu N được tính như sau: Sử dụng matlab tính
( không viết vào bài ở chương 2 khi nào mô phỏng mới nhân vào đầu vào) −1 − − N = − = − = - C ( A BK ) 1 1 B 52.5
C ( A − BK ) 1 B
Khi mô phỏng nhân với ma trận tham chiếu vào đầu vào mô phỏng.
File matlab mẫu tham khảo: thichnghi_bac 3 Kết quả mô phỏng
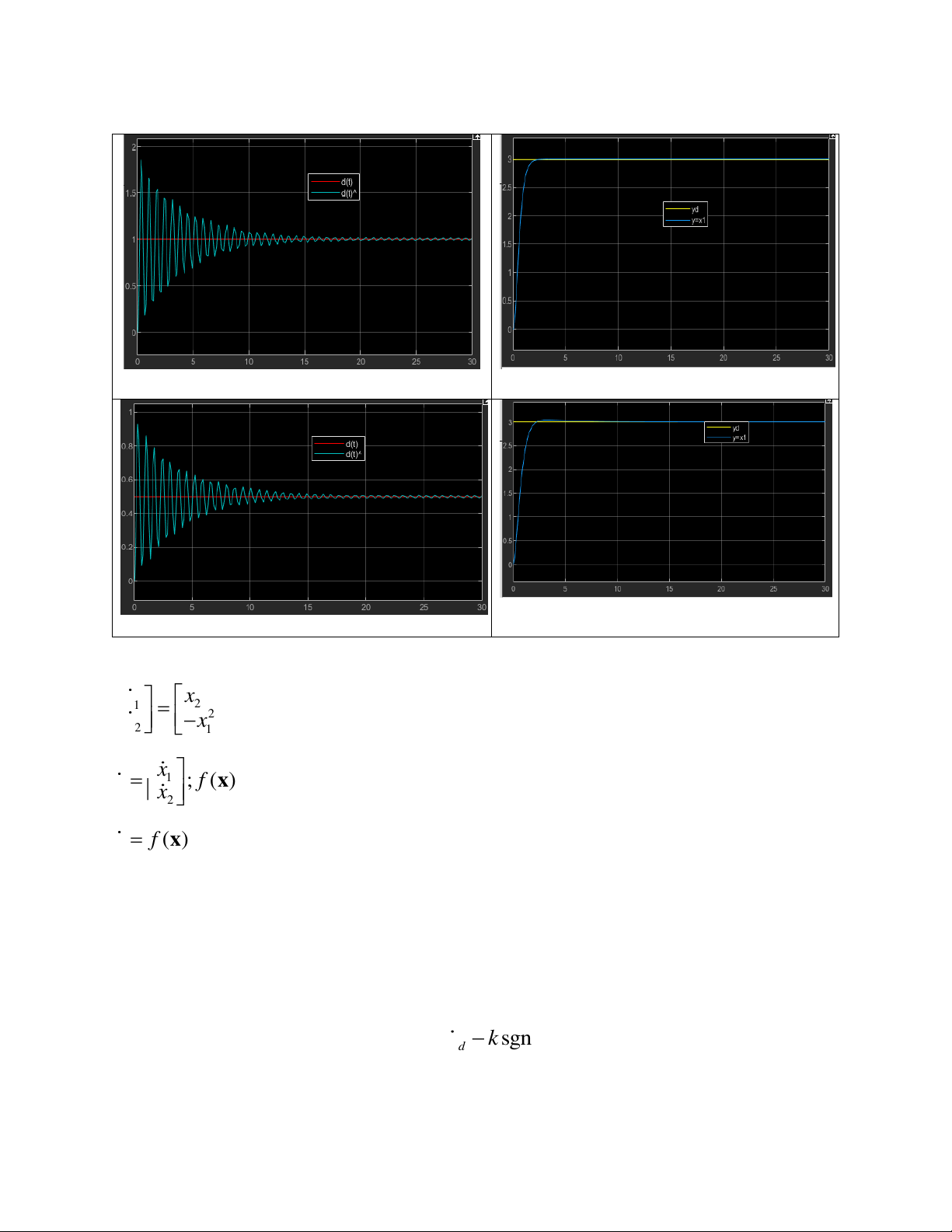
Kết quả nhận dạng nhiễu d(t)=1*1(t)
Kết quả bám tín hiệu đặt y = 3 d
Kết quả bám tín hiệu đặt y = 0.8
Kết quả nhận dạng nhiễu d(t)=0.5*1(t) d
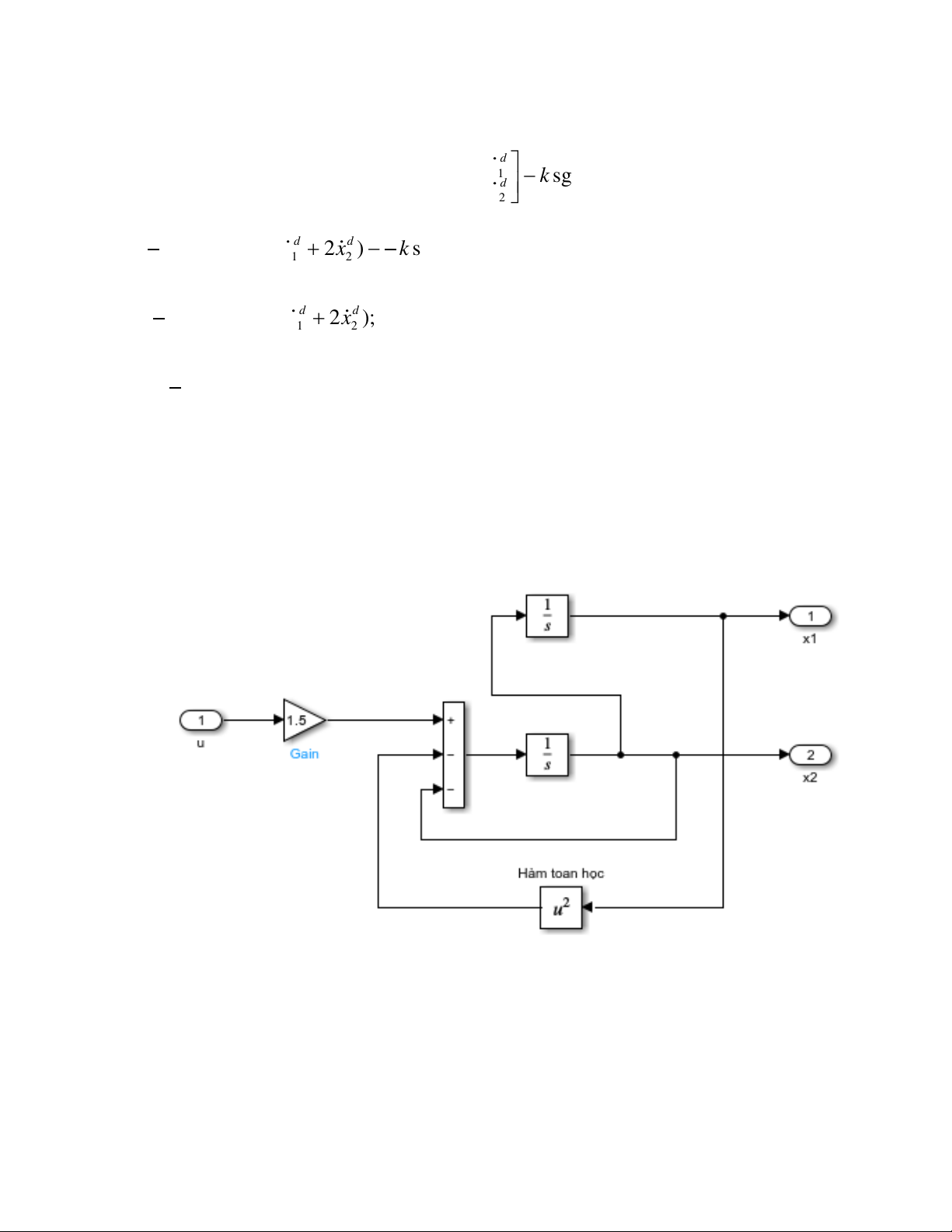
Vị dụ 3. Cho hệ phi tuyến SISO bậc 2 tổng hợp bộ điều khiển trượt. x x 0 1 2 = + 2 u (1) x −x − x 1 .5 2 1 2 x x 0 1 2 x = ; f (x) = x = 2 ; g( ) x −x − x 1 .5 2 1 2
x = f (x) + g(x)u Chọn mặt trượt d
e x x 1 1 1 s = C ;
e e = x − x ; = − ; d d e x 2 2 x 2
C = [c c ] , c ,c được chọn sao cho đa thức 2
p + c p + c = 0 là Hurwitz dùng phương pháp 1 2 1 2 2 1
cho trước điểm cực, đọc vở ghi.
Giả sử chọn C = [1 2]. Chú ý dấu −
Bộ điều khiển u = Cg x 1 ( ) ( C − f ( )
x + Cx − k sgn(s) . d ) Thay số vào ta có: 1 − 0 d x x 2 1 u = [1 2] -[1 2] + − 2 [1 2] k s d sgn( ) 1.5 −x − x x 1 2 2 1 d d 1 2
u = (−2x − 3x + x + 2x ) − k sgn(s) = u + u 1 2 1 2 1 2 3 3 1 2 u = ( 2 − x − 3 d
x + x + 2 d x ); 1 1 2 1 2 3 1
u = − k sgn(s). 2 3
Chọn k >0 khi nào bám tín hiệu d
y = y = x d 1
Phương pháp này không cần dùng N ma trận thâm chiếu.
File matlab mẫu tham khảo: dieukhientruot
Sơ đồ đố tượng điều khiển:
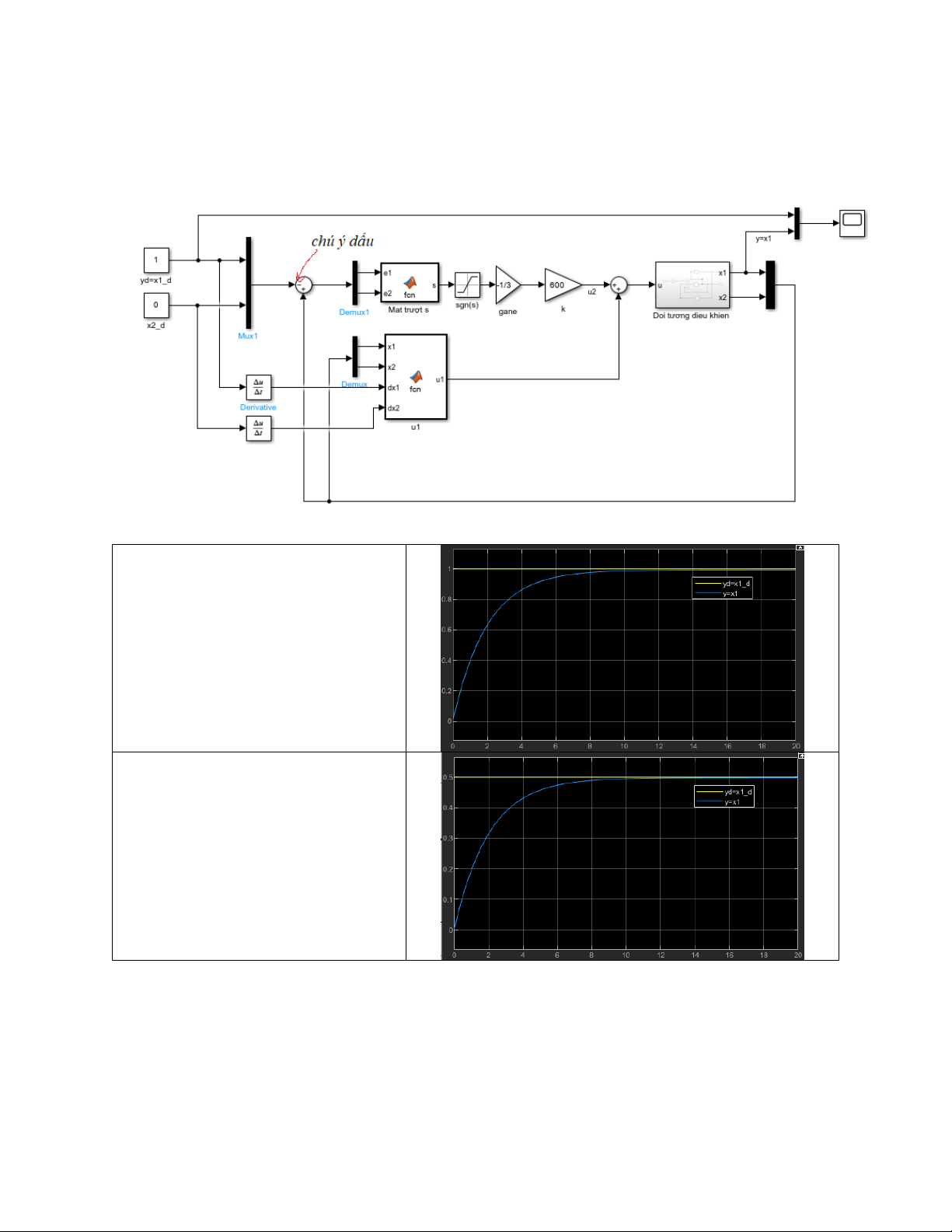
Sơ đồ hệ thống điều khiển Kết quả mô phỏng:
Tín hiệu đặt mong mốn y d
Xem phần trước Th đã gửi
y = x _ d 1 d 1 x = = d x _ d 0 2
y = x _ d 1 d 1 x = = d x _ d 0 2
Các bài điều khiển trượt bậc cao hơn làm tương tự, chú ý dấu. Làm bài cẩn thận.
Trên đây là các ví dụ để các em ôn phần mô phỏng.



