Bài Tập Lớn IOT - Ô Tô Camera Điều Khiển Wifi và Nhận Diện Vật Thể | Iot và ứng dụng | Học viện Công nghệ Bưu chính Viễn thông
Trong thực tế, có rất nhiều nơi con người không thể đến được vì nhiều nguyên nhân như môi trường độc hại, bị ô nhiểm, phóng xạ, hay những không gian nhỏ hẹp con người không thể tiếp cận đến được. Để đưa ra giải pháp cho vấn đề thám hiểm khu vực con người khó tiếp cận, nhóm chúng em quyết định chọn đề tài “Ô tô camera điều khiển bằng wifi nhận diện thực thể” để thay thế con người tiên phong kiểm tra môi trường khu vực cần tác nghiệp, hệ thống này có thể giúp ích trong việc thám hiểm, cứu hộ, nghiên cứu địa chất,.. Tài liệu được sưu tầm và soạn thảo dưới dạng file PDF để gửi tới các bạn cùng tham khảo, ôn tập đầy đủ kiến thức, chuẩn bị cho các buổi học thật tốt. Mời bạn đọc đón xem!
Môn: IoT và ứng dụng 143 tài liệu
Trường: Học viện Công Nghệ Bưu Chính Viễn Thông 1.8 K tài liệu
Tác giả:

Preview text:
HỌC VIỆN CÔNG NGHỆ BƯU CHÍNH VIỄN THÔNG
KHOA CÔNG NGHỆ THÔNG TIN
______________________________________
Mạng Truyền Thông Vô Tuyến BÀI TẬP LỚN
Ô TÔ CAMERA ĐIỀU KHIỂN BẰNG WIFI
NHẬN DIỆN THỰC THỂ
Họ và Tên: Nguyễn Minh Tuấn Mã SV: B20DCVT336
Hà Nội, Tháng 5, 2023 MỤC LỤC I.
GIỚI THIỆU ĐỀ TÀI ..................................................................... 3
II. NỘI DUNG CHÍNH ........................................................................ 4
1. Yêu cầu đối với Hệ thống cần xây dựng ....................................... 4
1.1. Chức năng chính: ....................................................................... 4
1.2. Miêu tả các yêu cầu đối với Hệ thống cần xây dựng: ................ 4
2. Phần cứng của hệ thống: ................................................................... 4
2.1.Khối nguồn .................................................................................. 4
2.2. ESP32 CAM ............................................................................... 5
2.3. Motor driver L298N ................................................................... 6
2.4. Động cơ bánh xe ........................................................................ 6
2.5. Khung xe Car kit 4WD .............................................................. 7
2.6. Động cơ Servo sử dụng để nâng hạ camera ............................... 8
3. Phần mềm của hệ thống: ................................................................... 8
3.1. Module điều khiển xe ................................................................. 8
3.2. Module nhận diện vật thể ........................................................... 9
4. Phương pháp thực hiện ................................................................... 10
4.1. Sơ đồ khối toàn hệ thống: ........................................................ 10
4.2. Sơ đồ mạch kết nối: .................................................................. 11
5. Kết quả của đề tài: ........................................................................... 12
III. KẾT LUẬN ................................................................................... 15
IV. TÀI LIỆU THAM KHẢO ........................................................... 15 2 I.
GIỚI THIỆU ĐỀ TÀI
Trong thực tế, có rất nhiều nơi con người không thể đến được vì
nhiều nguyên nhân như môi trường độc hại, bị ô nhiểm, phóng xạ, hay
những không gian nhỏ hẹp con người không thể tiếp cận đến được.
Để đưa ra giải pháp cho vấn đề thám hiểm khu vực con người khó
tiếp cận, nhóm chúng em quyết định chọn đề tài “Ô tô camera điều
khiển bằng wifi nhận diện thực thể” để thay thế con người tiên phong
kiểm tra môi trường khu vực cần tác nghiệp, hệ thống này có thể giúp
ích trong việc thám hiểm, cứu hộ, nghiên cứu địa chất,... 3 II. NỘI DUNG CHÍNH
1. Yêu cầu đối với Hệ thống cần xây dựng
1.1. Chức năng chính:
− Khả năng di chuyển thông qua điều khiển từ xa bằng wifi.
− Camera quay lên xuống và nhận diện thực thể.
1.2. Miêu tả các yêu cầu ố
đ i với Hệ thống cần xây dựn : g
− Hệ thống sử dụng ESP32-CAM như một điểm truy cập (điểm phát
sóng), từ đó có thể sử dụng điện thoại để kết nối tới thông qua Wifi.
Khi thiết bị di động đã kết nối được tới ESP32-CAM.
− Người dùng nhập địa chỉ IP 192.168.4.1 vào trình duyệt để được hướng
tới trang web điều khiển. Tại đây người dùng có thể thấy được hình ảnh
thông qua camera của ESP32-CAM, người dùng ấn vào 4 nút mũi tên
tương ứng với các hướng trên, dưới, trái, phải thì nó sẽ gửi dữ liệu về
ESP32-CAM để xử lý và di chuyển xe theo hướng người dùng ấn.
Ngoài ra, người dùng có thể điều chỉnh tốc độ xe, đèn flash.
− Có thể nhận diện vật thể qua app trên điện thoại.
2. Phần cứng của hệ thốn : g
2.1.Khối nguồn
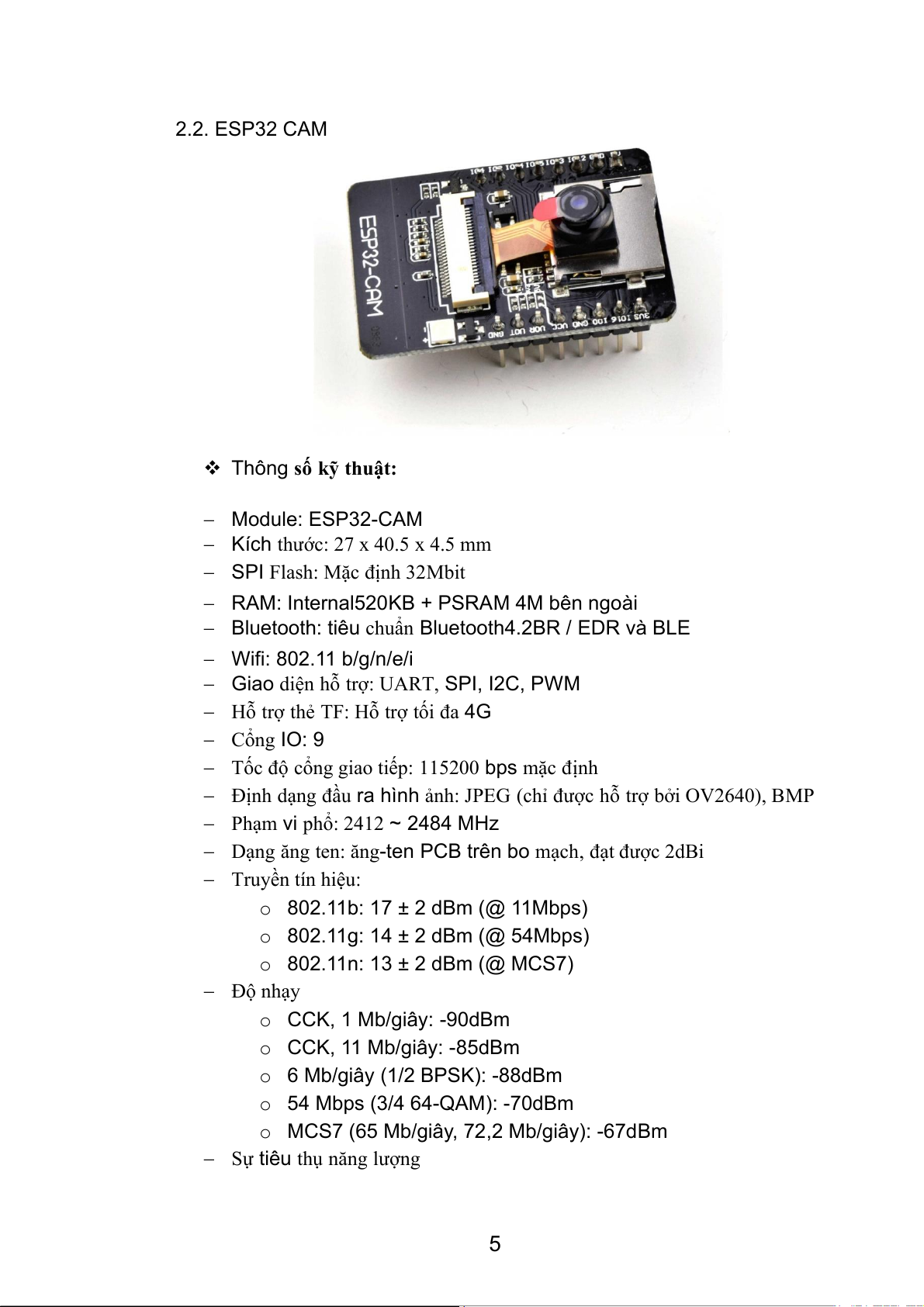
Hệ thống sử dụng Pin Lipo 3s 2200mAh 45C Điện áp đầu vào 11.1v 4 2.2. ESP32 CAM
❖ Thông số kỹ thuật: − Module: ESP32-CAM
− Kích thước: 27 x 40.5 x 4.5 mm
− SPI Flash: Mặc định 32Mbit
− RAM: Internal520KB + PSRAM 4M bên ngoài
− Bluetooth: tiêu chuẩn Bluetooth4.2BR / EDR và BLE − Wifi: 802.11 b/g/n/e/i
− Giao diện hỗ trợ: UART, SPI, I2C, PWM
− Hỗ trợ thẻ TF: Hỗ tr ợ tối đa 4G − Cổng IO: 9
− Tốc độ cổng giao tiếp: 115200 bps mặ c định
− Định dạng đầu ra hình ảnh: JPEG (chỉ được hỗ tr ợ bởi OV2640), BMP
− Phạm vi phổ: 2412 ~ 2484 MHz
− Dạng ăng ten: ăng-ten PC
B trên bo mạch, đạt được 2dBi − Truyền tín hiệu:
o 802.11b: 17 ± 2 dBm (@ 11Mbps)
o 802.11g: 14 ± 2 dBm (@ 54Mbps)
o 802.11n: 13 ± 2 dBm (@ MCS7) − Độ nhạy o CCK, 1 Mb/giây: -90dBm o CCK, 11 Mb/giây: -85dBm
o 6 Mb/giây (1/2 BPSK): -88dBm
o 54 Mbps (3/4 64-QAM): -70dBm
o MCS7 (65 Mb/giây, 72,2 Mb/giây): -67dBm − Sự tiê u th ụ năng lượng 5
o Tắt đèn flash: 180mA @ 5V
o Bật đèn flash và điều chỉnh độ sáng tối đa: 310mA @ 5V o Sleep Deep: Mức tiê
u thụ điện năng thấp nhất có thể đạt 6mA @ 5V
o Modem-bed: lên tới 20mA @ 5V
o Sleep Light: lên tới 6,7mA@5V
− Bảo vệ: WPA / WPA2 / WPA2-Enterprise / WPS
− Phạm vi cung cấp điện: 5V
− Nhiệt độ hoạt động: -20 ° C ~ 85 °C
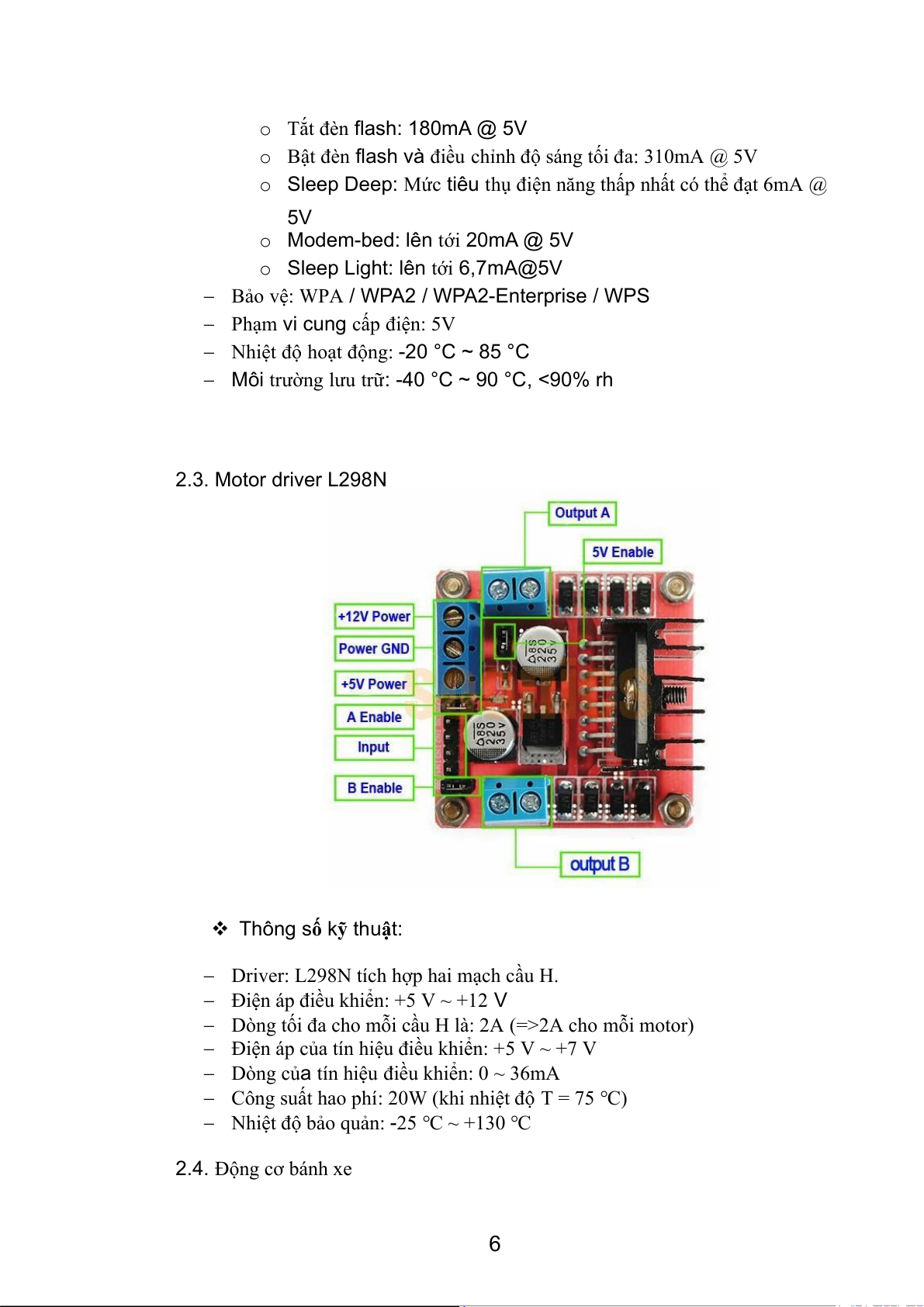
− Môi trường lưu trữ: -40 ° C ~ 90 °C, <90% rh 2.3. Motor driver L298N
❖ Thông số kỹ thuật:
− Driver: L298N tích hợp hai mạch cầu H.
− Điện áp điều khiển: +5 V ~ +12 V
− Dòng tối đa cho mỗi cầu H là: 2A (=>2A cho mỗi motor)
− Điện áp của tín hiệu điều khiển: +5 V ~ +7 V
− Dòng của tín hiệu điều khiển: 0 ~ 36mA
− Công suất hao phí: 20W (khi nhiệt độ T = 75 ℃)
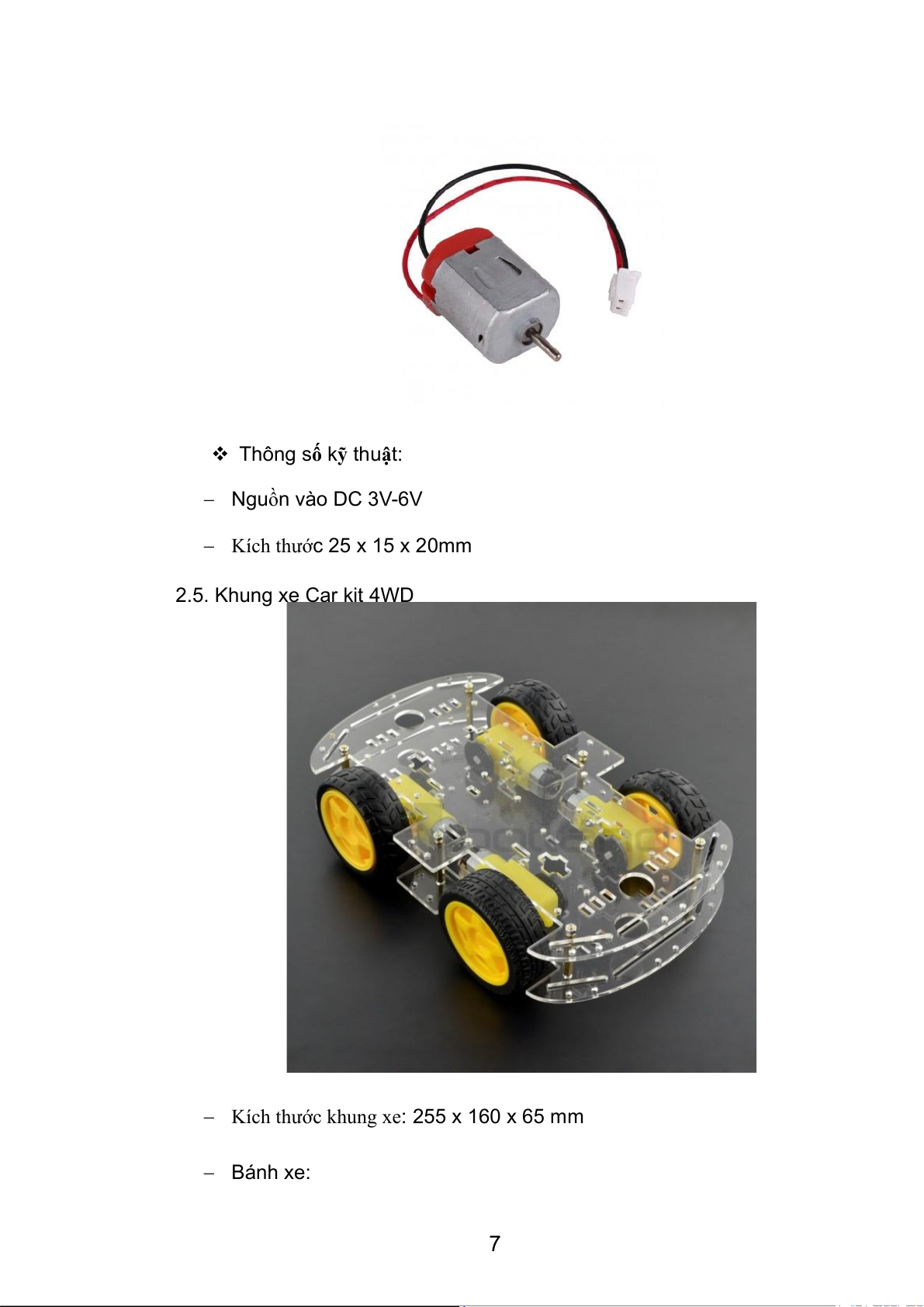
− Nhiệt độ bảo quản: -25 ℃ ~ +130 ℃ 2.4. Động cơ bánh xe 6
❖ Thông số kỹ thuật: − Nguồn vào DC 3V-6V
− Kích thước 25 x 15 x 20mm 2.5. Khung xe Car kit 4WD
− Kích thước khung xe: 255 x 160 x 65 mm − Bánh xe: 7 D: 65 mm W: 30 mm
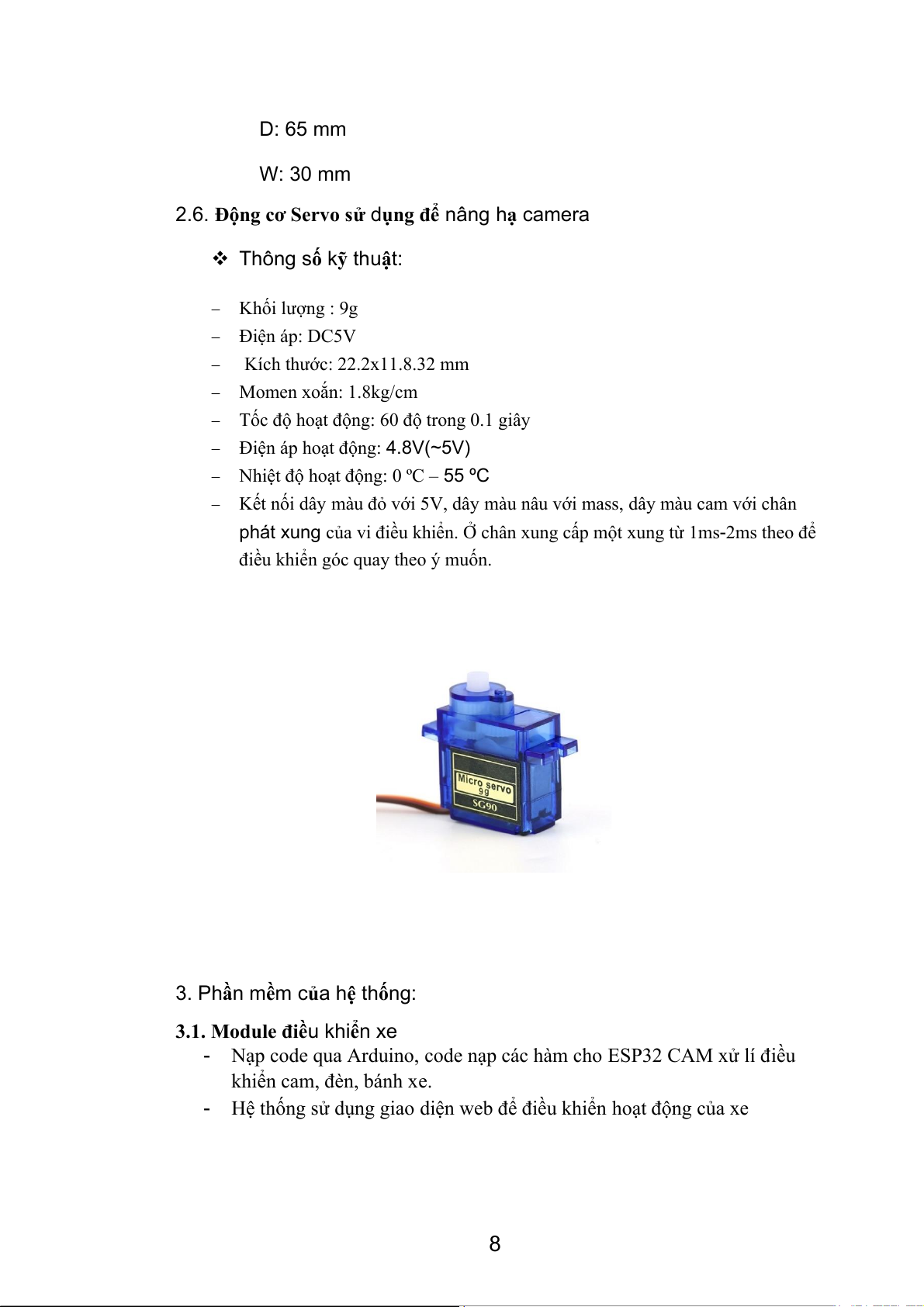
2.6. Động cơ Servo sử dụng để nâng hạ camera
❖ Thông số kỹ thuật: − Khối lượng : 9g − Điện áp: DC5V
− Kích thước: 22.2x11.8.32 mm − Momen xoắn: 1.8kg/cm
− Tốc độ hoạt động: 60 độ trong 0.1 giây
− Điện áp hoạt động: 4.8V(~5V)
− Nhiệt độ hoạt động: 0 ºC – 55 ºC
− Kết nối dây màu đỏ với 5V, dây màu nâu với mass, dây màu cam với chân
phát xung của vi điều khiển. Ở chân xung cấp một xung từ 1ms-2ms theo để
điều khiển góc quay theo ý muốn.
3. Phần mềm của hệ thống :
3.1. Module điều khiển xe
- Nạp code qua Arduino, code nạp các hàm cho ESP32 CAM xử lí điều khiển cam, đèn, bánh xe.
- Hệ thống sử dụng giao diện web để điều khiển hoạt động của xe 8
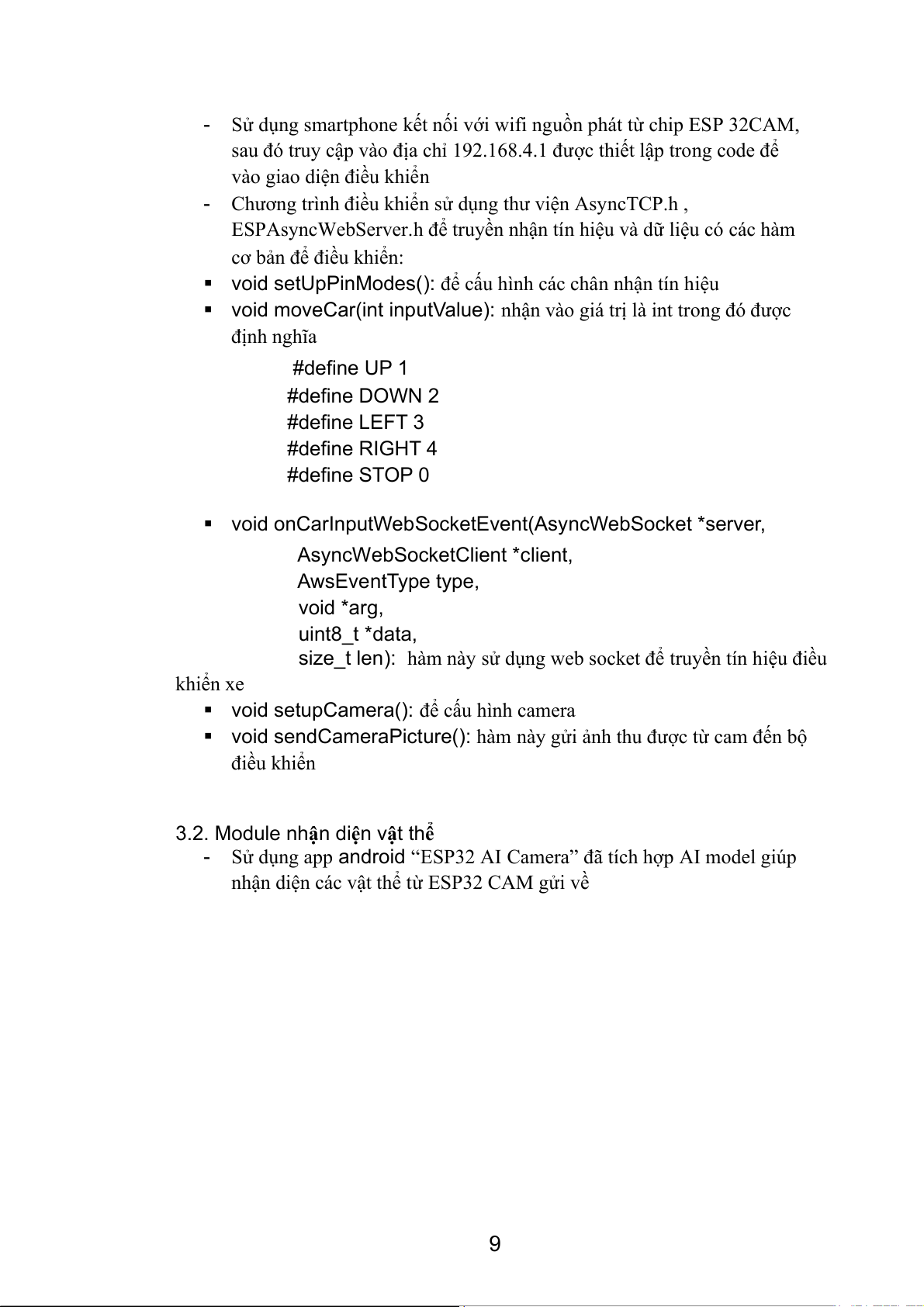
- Sử dụng smartphone kết nối với wifi nguồn phát từ chip ESP 32CAM,
sau đó truy cập vào địa chỉ 192.168.4.1 được thiết lập trong code để
vào giao diện điều khiển
- Chương trình điều khiển sử dụng thư viện AsyncTCP.h ,
ESPAsyncWebServer.h để truyền nhận tín hiệu và dữ liệu có các hàm
cơ bản để điều khiển:
▪ void setUpPinModes(): để cấu hình các chân nhận tín hiệu
▪ void moveCar(int inputValue): nhận vào giá trị là int trong đó được định nghĩa #define UP 1 #define DOWN 2 #define LEFT 3 #define RIGHT 4 #define STOP 0
▪ void onCarInputWebSocketEvent(AsyncWebSocket *server,
AsyncWebSocketClient *client, AwsEventType type, void *arg, uint8_t *data,
size_t len): hàm này sử dụng web socket để truyền tín hiệu điều khiển xe
▪ void setupCamera(): để cấu hình camera
▪ void sendCameraPicture(): hàm này gửi ảnh thu được từ cam đến bộ điều khiển
3.2. Module nhận diện vật thể
- Sử dụng app android “ESP32 AI Camera” đã tích hợp AI model giúp
nhận diện các vật thể từ ESP32 CAM gửi về 9
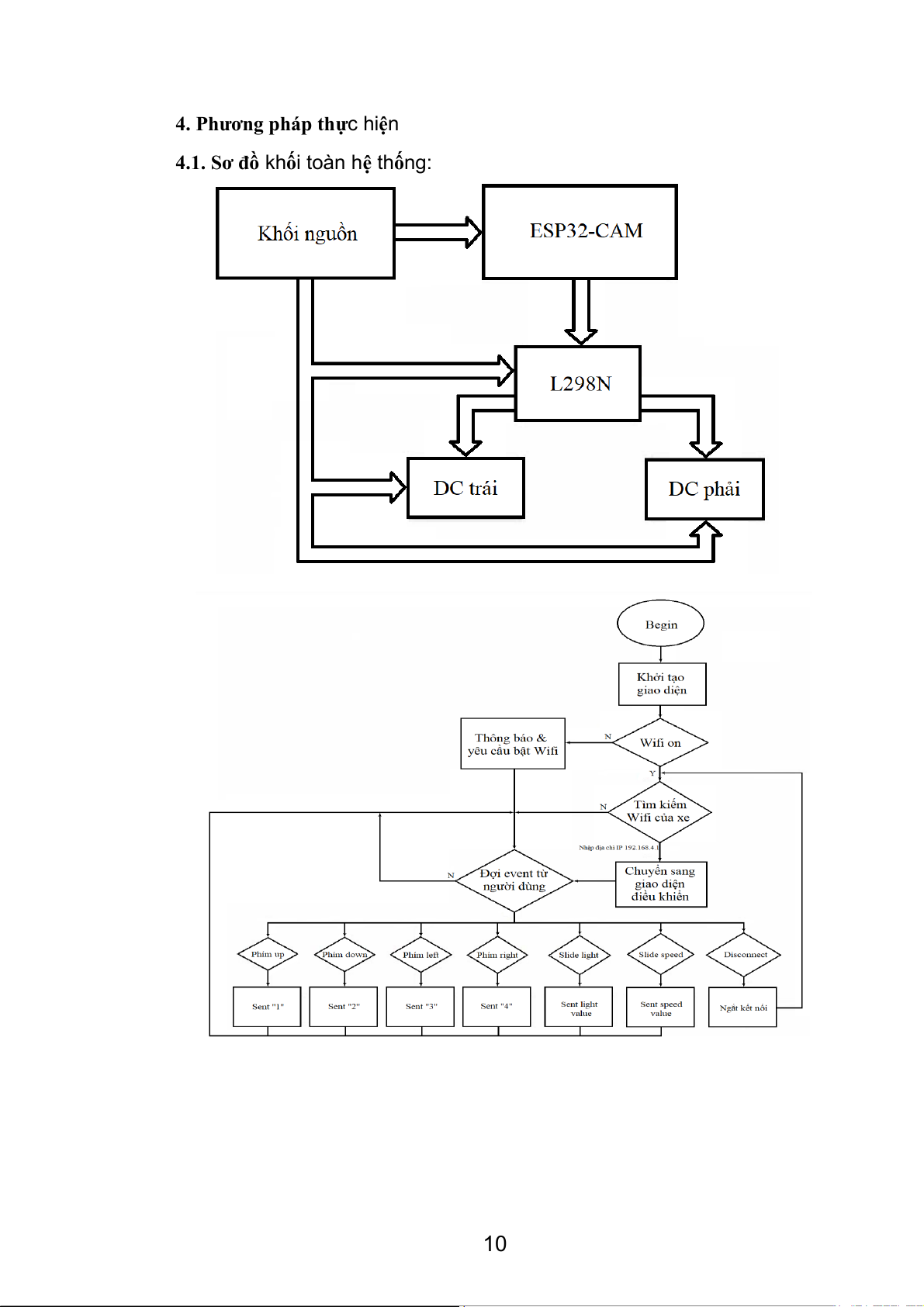
4. Phương pháp thực hiện
4.1. Sơ đồ khối toàn hệ thống: 10
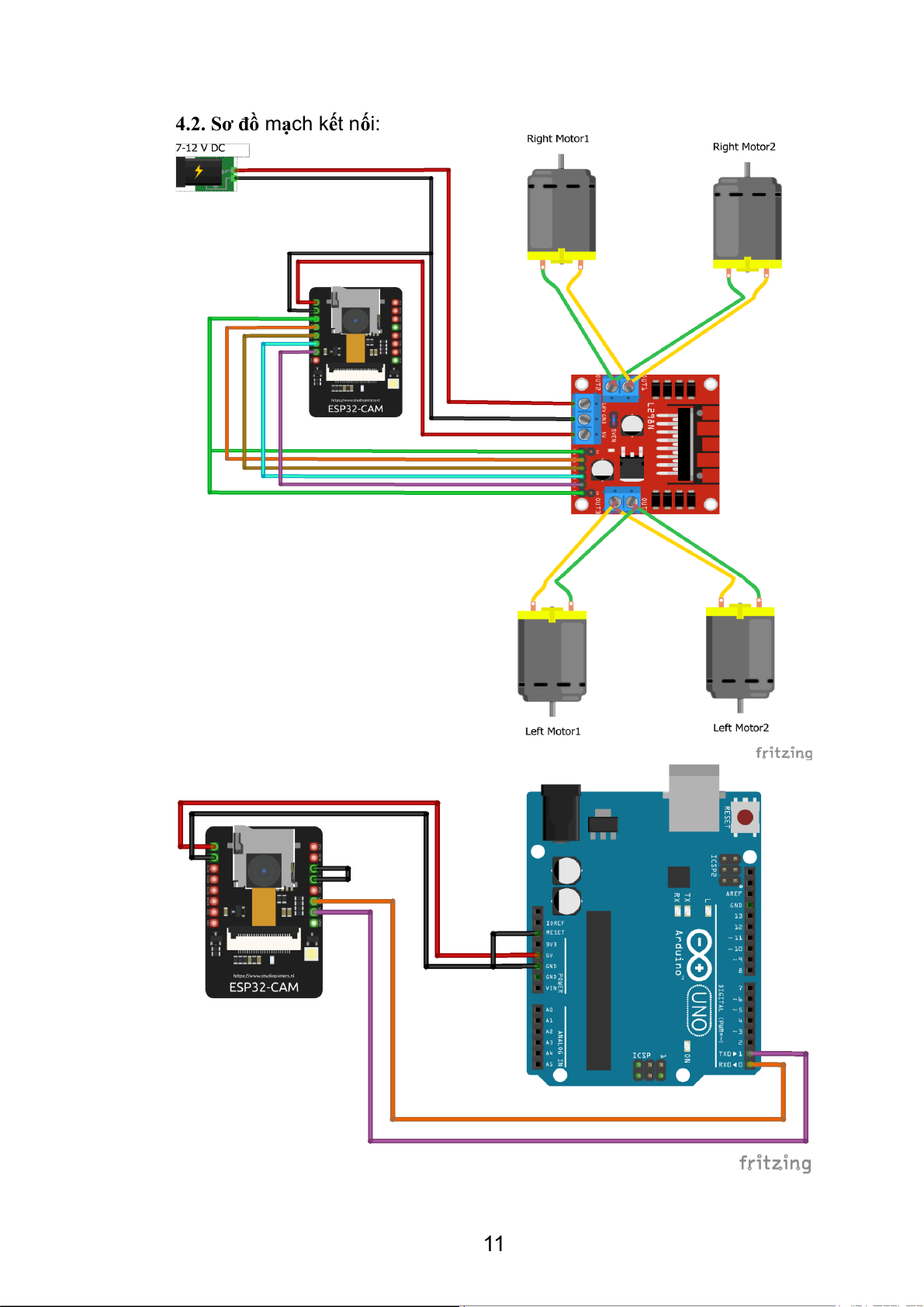
4.2. Sơ đồ mạch kết nối: 11
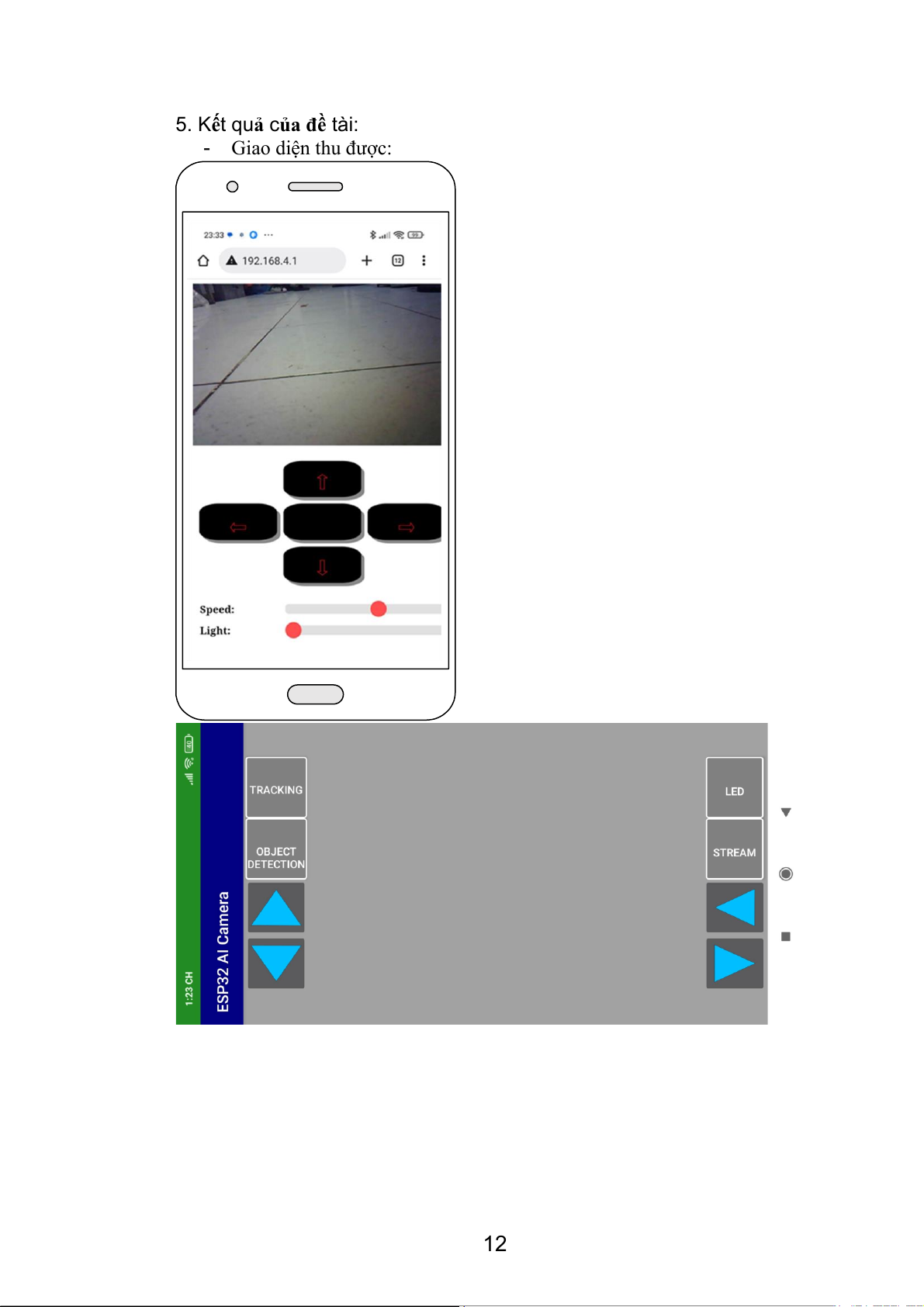
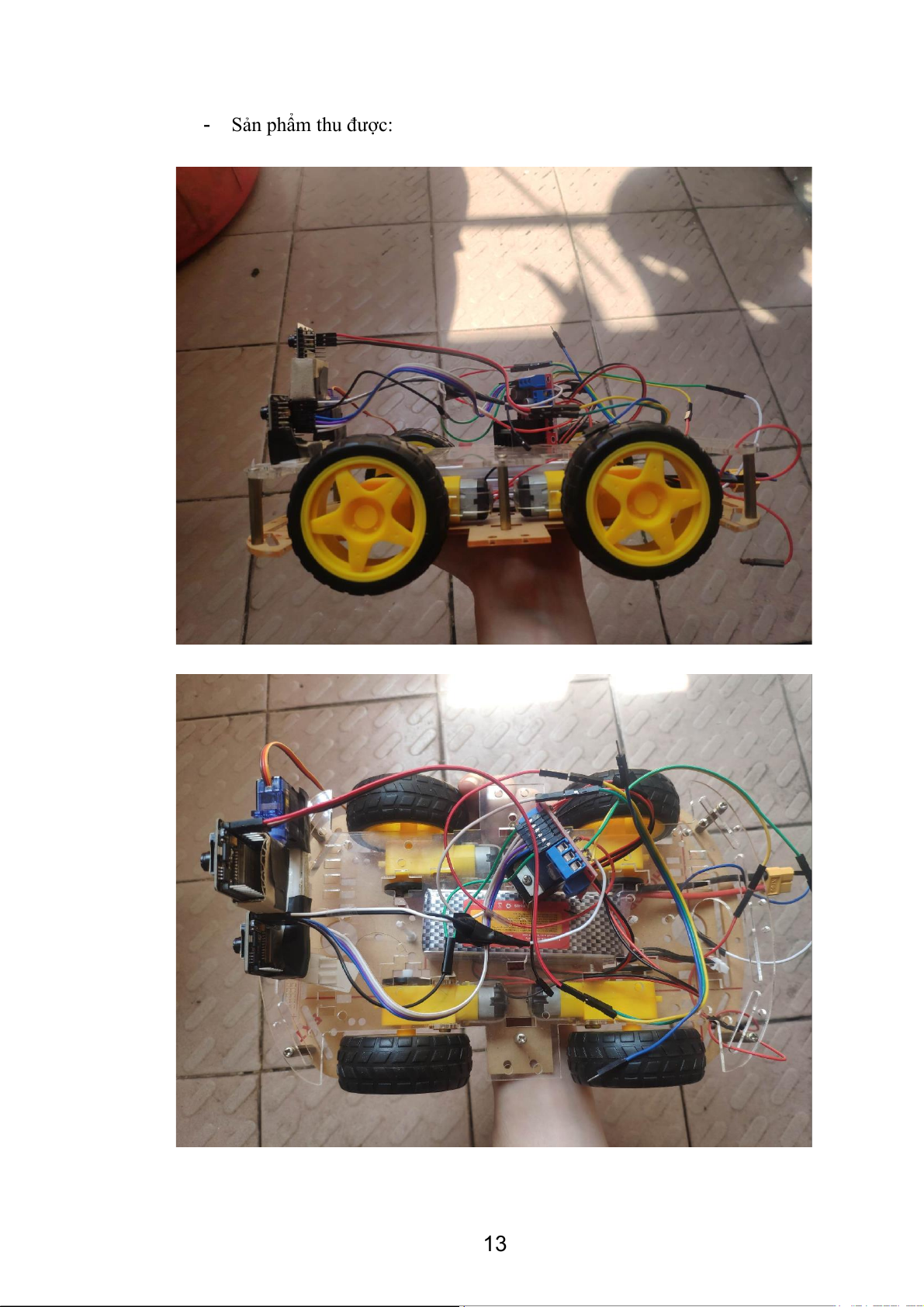
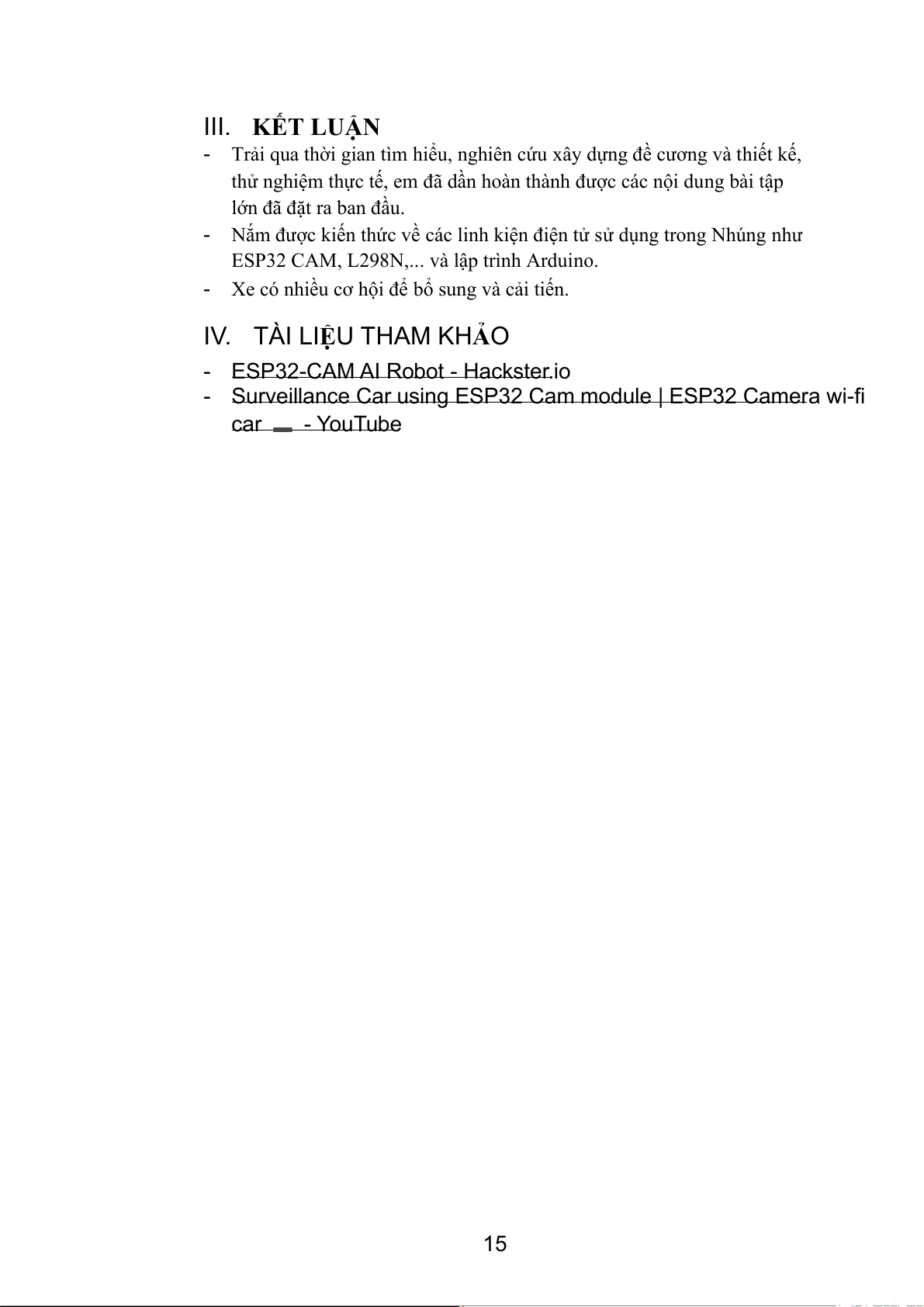
5. Kết quả của đề tài: - Giao diện thu được: 12 - Sản phẩm thu được: 13 14 III. KẾT LUẬN
- Trải qua thời gian tìm hiểu, nghiên cứu xây dựng đề cương và thiết kế,
thử nghiệm thực tế, em đã dần hoàn thành được các nội dung bài tập
lớn đã đặt ra ban đầu.
- Nắm được kiến thức về các linh kiện điện tử sử dụng trong Nhúng như
ESP32 CAM, L298N,... và lập trình Arduino.
- Xe có nhiều cơ hội để bổ sung và cải tiến.
IV. TÀI LIỆU THAM KHẢO
- ESP32-CAM AI Robot - Hackster.io
- Surveil ance Car using ESP32 Cam module | ESP32 Camera wi-fi car - YouTube 15
Tài liệu liên quan:
-

Tóm tắt lý thuyết môn IoT và ứng dụng | Học viện Công Nghệ Bưu Chính Viễn Thông
22 11 -

Accelerated Corner-Detector Algorithms: GPU Implementations and Results | Iot và ứng dụng | Học viện Công nghệ Bưu chính Viễn thông
46 23 -

Đề xuất Dự án IoT: Thiết bị phát hiện chạm cho xe máy | Iot và ứng dụng | Học viện Công nghệ Bưu chính Viễn thông
35 18 -

Phân Tích và Giải Pháp FastAPI | Iot và ứng dụng | Học viện Công nghệ Bưu chính Viễn thông
30 15 -

Tăng cường pháp chế xã hội chủ nghĩa trong quản lý nhà nước | Iot và ứng dụng | Học viện Công nghệ Bưu chính Viễn thông
25 13