Bài thuyết trình về robot công nghệ | môn công nghệ thông tin | trường Đại học Huế
Chương 1: Giới thiệu chung về robot công nghệ.Tổng quan về robot công nghệ. Chuwong 2: Phân tích, lựa chọn cấu trúc và thiết kế 3D mô hình robot.Chương 3: Thiết kế quỹ đạo chuyên động.Chương 4: Phân tích trạng thái tĩnh của robot. Chương5: Tính toán động lực học. Chương 6: Thiết kế hệ dẫn động cho robot. Chương 7: Thiết kế hệ thống điều khiển. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Công nghệ thông tin (ĐHH) 11 tài liệu
Trường: Đại học Huế 411 tài liệu
Tác giả:






Preview text:
lO M oARcPSD| 47704698 lO M oARcPSD| 47704698 MỤC LỤC
CHƯƠNG 1: GIỚI THIỆU CHUNG VỀ ROBOT CÔNG NGHIỆP ...................... 3
1.1 TỔNG QUAN VỀ ROBOT CÔNG NGHIỆM ............................................. 3
1.1.1 Định nghĩa về Robot công nghiệp ......................................................... 3
1.1.2 Ứng dụng của Robot trong công nghiệp ................................................ 4
1.2 PHÂN LOẠI ROBOT ................................................................................ 6
CHƯƠNG 2: PHÂN TÍCH, LỰA CHỌN CẤU TRÚC VÀ THIẾT KẾ 3D MÔ
HÌNH ROBOT .................................................................................................. 10
2.1 PHÂN TÍCH MỤC ĐÍCH, ỨNG DỤNG CỦA ROBOT ............................ 10
2.2 PHÂN TÍCH YÊU CẦU KỸ THUẬT THAO TÁC ................................... 10
2.2.1 Đối tượng thao tác, dạng thao tác........................................................ 10
2.2.2 Phân tích yêu cầu về vị trí .................................................................. 10
2.2.3 Yêu cầu về hướng của khâu thao tác và không gian thao tác ................ 11
2.2.4 Yêu cầu về vận tốc, gia tốc ................................................................. 11
2.3 XÁC ĐỊNH CÁC ĐẶC TRƯNG KỸ THUẬT .......................................... 11
2.4 CÁC PHƯƠNG ÁN THIẾT KẾ CẤU TRÚC ROBOT, LỰA CHỌN CẤU
..................................................................................................................... 11
TRÚC CÁC KHÂU KHỚP ............................................................................ 11
2.5 THIẾT KẾ MÔ HÌNH 3D ROBOT ........................................................... 13
CHƯƠNG 3: THIẾT KẾ QUỸ ĐẠO CHUYỂN ĐỘNG ..................................... 14
3.1 KHẢO SÁT ĐỘNG HỌC THUẬN, KHẢO SÁT ĐỘNG HỌC NGƯỢC .. 14 1 lO M oARcPSD| 47704698
3.1.1 Khảo sát động học thuận .................................................................... 14
3.1.2 Khảo sát động học ngược ................................................................... 19
3.1.3 Không gian làm việc .......................................................................... 20
3.1.4 Ứng dụng matlab vẽ ồ thị ................................................................... 21
CHƯƠNG 4: PHÂN TÍCH TRẠNG THÁI TĨNH CỦA ROBOT......................... 26
4.1 CƠ SỞ LÝ THUYẾT .............................................................................. 26
4.2 GIẢI BÀI TOÁN CỤ THỂ ....................................................................... 27
CHƯƠNG 5 : TÍNH TOÁN ĐỘNG LỰC HỌC .................................................. 33
5.1 TÍNH TOÁN ĐỘNG LỰC HỌC THUẬN................................................. 33
5.2 ĐỘNG LỰC HỌC NGƯỢC ..................................................................... 43
CHƯƠNG 6 : THIẾT KẾ HỆ DẪN ĐỘNG CHO ROBOT.................................. 46
6.1 GIỚI THIỆU MỘT SỐ HỆ DẪN ĐỘNG HAY DÙNG TRONG ROBOT . 46
CÔNG NGHIỆP ............................................................................................ 46
6.2 THIẾT KẾ CHO KHÂU 1 VÀ KHÂU 2 ................................................... 50
CHƯƠNG 7 : THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN ........................................ 55
7.1 Chọn luật iều khiển ...................................................................................... 55
7.2 Xây dựng mô hình trên MATLAB – SIMULINK...................................... 56
7.3 Kết quả mô phỏng ................................................................................... 63 2 lO M oARcPSD| 47704698
CHƯƠNG 1: GIỚI THIỆU CHUNG VỀ ROBOT CÔNG NGHIỆP
1.1 TỔNG QUAN VỀ ROBOT CÔNG NGHIỆM
Thuật ngữ robot ược sinh ra từ trên sân khấu, không phải trong phân xưởng
sản xuất. Những robot xuất hiện lần ầu tiên trên ở trên NewYork vào ngày
09/10/1922 trong vở “Rossum’s Universal Robot” của nhà soạn kịch người
Tiệp Karen Kapek viết năm 1921, còn từ robot là cách gọi tắt của từ robota -
theo tiếng Tiệp có nghĩa là công việc lao dịch.
1.1.1 Định nghĩa về Robot công nghiệp
Viện Nghiên cứu robot Hoa Kỳ ưa ra một ịnh nghĩa về robot như sau: “Robot
là một tay máy nhiều chức năng, thay ổi ược chương trình hoạt ộng, ược dùng
ể di chuyển vật liệu, chi tiết máy, dụng cụ hoặc dùng cho những công việc ặc
biệt thông qua những chuyển ộng khác nhau ã ược lập trình nhằm mục ích hoàn
thành những nhiệm vụ a dạng” (Schlussel, 1985).
Định nghĩa robot còn ược Mikel P.Groover, một nhà nghiên cứu hàng ầu
trong lĩnh vực robot, mở rộng hơn như sau: “Robot công nghiệp là những máy,
thiết bị tổng hợp hoạt ộng theo chương trình có những ặc iểm nhất ịnh tương tự như ở con người”.
Định nghĩa của M.P.Groover về robot không dừng lại ở tay máy mà mở rộng
ra cho nhiều ối tượng khác có những ặc tính tương tự như con người như là suy
nghĩ, có khả năng ưa ra quy ịnh và có thể nhìn thấy hoặc cảm nhận ược ặc iểm
của vật hay ối tượng mà nó phải thao tác hoặc xử lý. Theo Artobolevski I.I.,
Vorobiov M.V. và các nhà nghiên cứu thuộc trường phái khối SEV trước ây thì phát biểu rằng:
“Robot công nghiệp là những máy hoạt ộng tự ộng ược iều khiển theo chương
trình ể thực hiện việc thay ổi vị trí của những ối tượng thao tác khác nhau với
mục ích tự ộng hoá các quá trình sản xuất”.
Sự thống nhất trong tất cả các ịnh nghĩa nêu trên ở ặc iểm “ iều khiển theo
chương trình”. Đặc iểm này của robot ược thực hiện nhờ sự ra ời của những bộ
vi xử lý (microprocessors) và các vi mạch tích hợp chuyên dùng ược là “chip” trong những năm 70.
M ột số nhà khoa học hàng ầu trong lĩnh vực robot của Nhật Bản ưa ra những
ịnh nghĩa về robot dưới dạng những yêu cầu như sau: 3 lO M oARcPSD| 47704698
- Theo Giáo sư Sitegu Watanabe (Đại học Tổng hợp Tokyo) thì một robot công
nghiệp phải thoả mãn yếu tố sau:
• Có khả năng thay ổi chuyển ộng.
• Có khả năng cảm nhận ược ối tượng thao tác.
• Có số bậc chuyển ộng (bậc tự do) cao.
• Có khả năng thích nghi với môi trường hoạt ộng.
• Có khả năng hoạt ộng tương hỗ với ối tượng bên ngoài.
- Theo Giáo sư Masahiro Mori (Viện công nghệ Tokyo) thì robot công nghiệp
phải có các ặc iểm sau:
• Có khả năng thay ổi chuyển ộng.
• Có khả năng xử lý thông tin (biết suy nghĩ). • Có tính vạn năng.
• Có những ặc iểm của người và máy.
1.1.2 Ứng dụng của Robot trong công nghiệp a) Trên thế giới:
Hiện nay trên thế giới, do nhu cầu sử dụng robot ngày càng nhiều trong các
quá trình sản xuất phức tạp với mục ích góp phần nâng cao năng suất dây
chuyền công nghệ, giảm giá thành, nâng cao chất lượng, và nâng cao khả năng
cạnh tranh của sản phẩm ồng thời cải thiện iều kiện lao ộng, nên robot công
nghiệp cần có những khả năng thích ứng tốt và thông minh hơn với những cấu
trúc ơn giản và linh hoạt.
Có thể kể ến một số ứng dụng iển hình của robot trên thế giới như:
+ Robot song song dùng trong phân loại và óng gói sản phẩm: IRB 660 Flex
Palletizer, IRB 340 FlexPicker, IRB 260 FlexPicker. Các robot này có thể gắp
lần lượt các hộp vắc xin bại liệt từ băng tải và ặt nó vào thùng gồm 20 hộp một cách chính xác.
+ Robot dùng trong công nghệ ép phun nhựa: IRB 6650 của hãng ABB có thể
thao tác nhanh, dễ dàng lấy sản phẩm ra khỏi khuôn ở vị trí tách khuôn, giám
sát, làm sạch, iều khiển chất lượng dựa trên camera b) Tại Việt Nam: 4 lO M oARcPSD| 47704698
Nước ta ứng dụng của robot công nghiệp rất a ạng, tùy vào những nghành,
công việc khác nhau mà ta có thể áp dụng những robot công nghiệp riêng biệt.
Dưới ây là một số nghành trong hệ thống sản xuất mà áp dụng robot công nghiệp.
+ Công nghiệp úc: robot làm nhiệm vụ rót kim loại nóng chảy vào khuôn, cắt mép
thừa, làm sạch vật úc hoặc làm tăng bền vật úc bằng cách phun cát.
+ Ngành gia công áp lực: các quá trình hàn và nhiệt luyện thường bao gồm nhiều
công việc ộc hại và ở nhiệt ộ cao, iều kiện làm việc khá nặng nề, dễ gây mệt
mỏi nhất là ở trong các phân xưởng rèn dập.
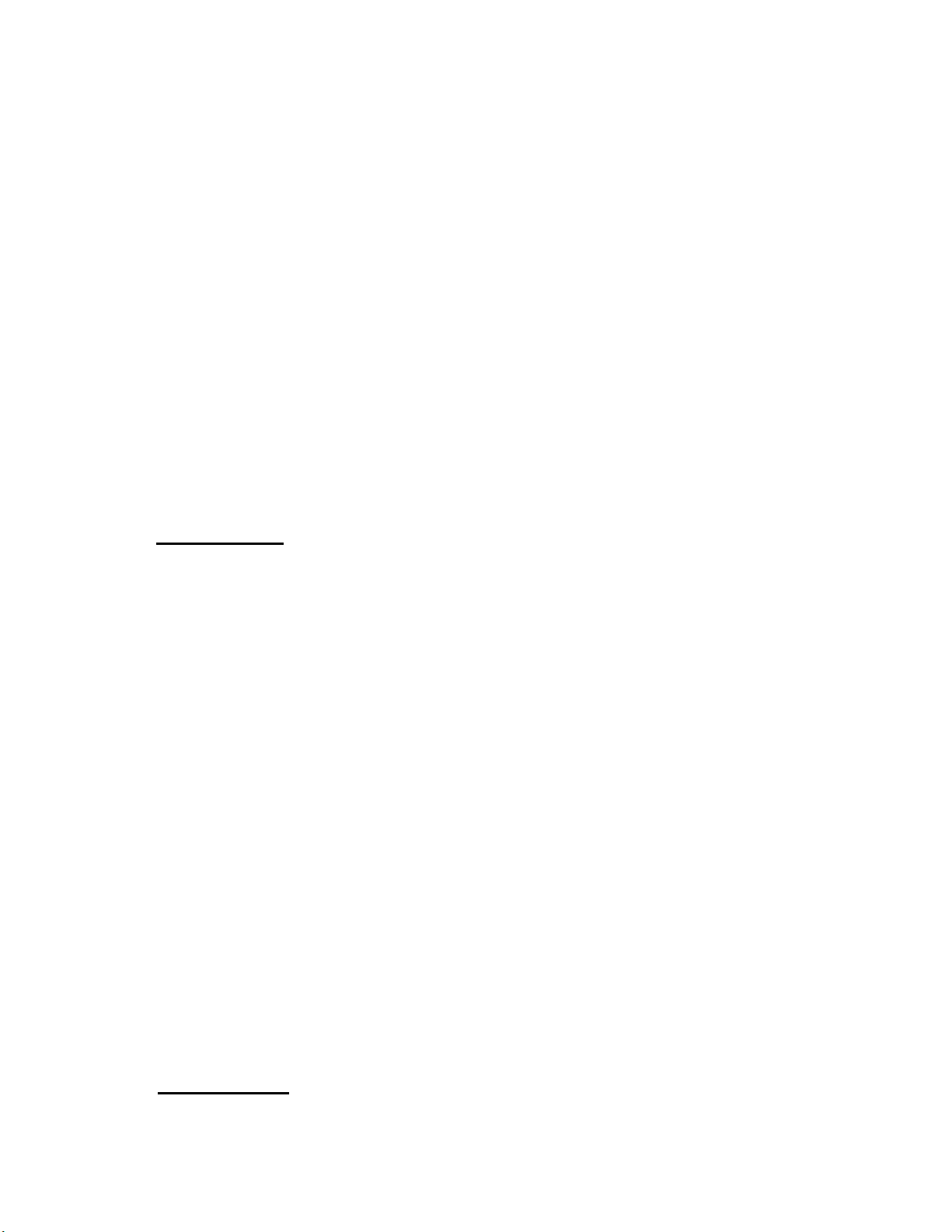
Trong những năm gần ây thì việc áp dụng các loại robot vào dây chuyền
sản xuất ngày càng phổ biến. Ví dụ như các loại robot hàn, robot phun sơn, hay
các robot lắp ráp. Nhiều công việc òi hỏi ộ chính xác cao vì vậy robot ược sử
dụng một cách phổ biến. Trong các môi trường công việc ộc hại, người ta sử
dụng robot ể thay cho con người. 5 lO M oARcPSD| 47704698
Hình ảnh làm việc của Robot trong hàn và dây chuyền sản xuất lắm ráp 1.2 PHÂN LOẠI ROBOT
1.2.1 Phân loại theo dạng hình học của không gian hoạt ộng
Để dịch chuyển khâu tác ộng cuối cùng của robot ến vị trí của ối tượng thao
tác ược cho trước trong không gian làm việc cần phải có ba bậc chuyển ộng
chuyển dời hay chuyển ộng ịnh vị.
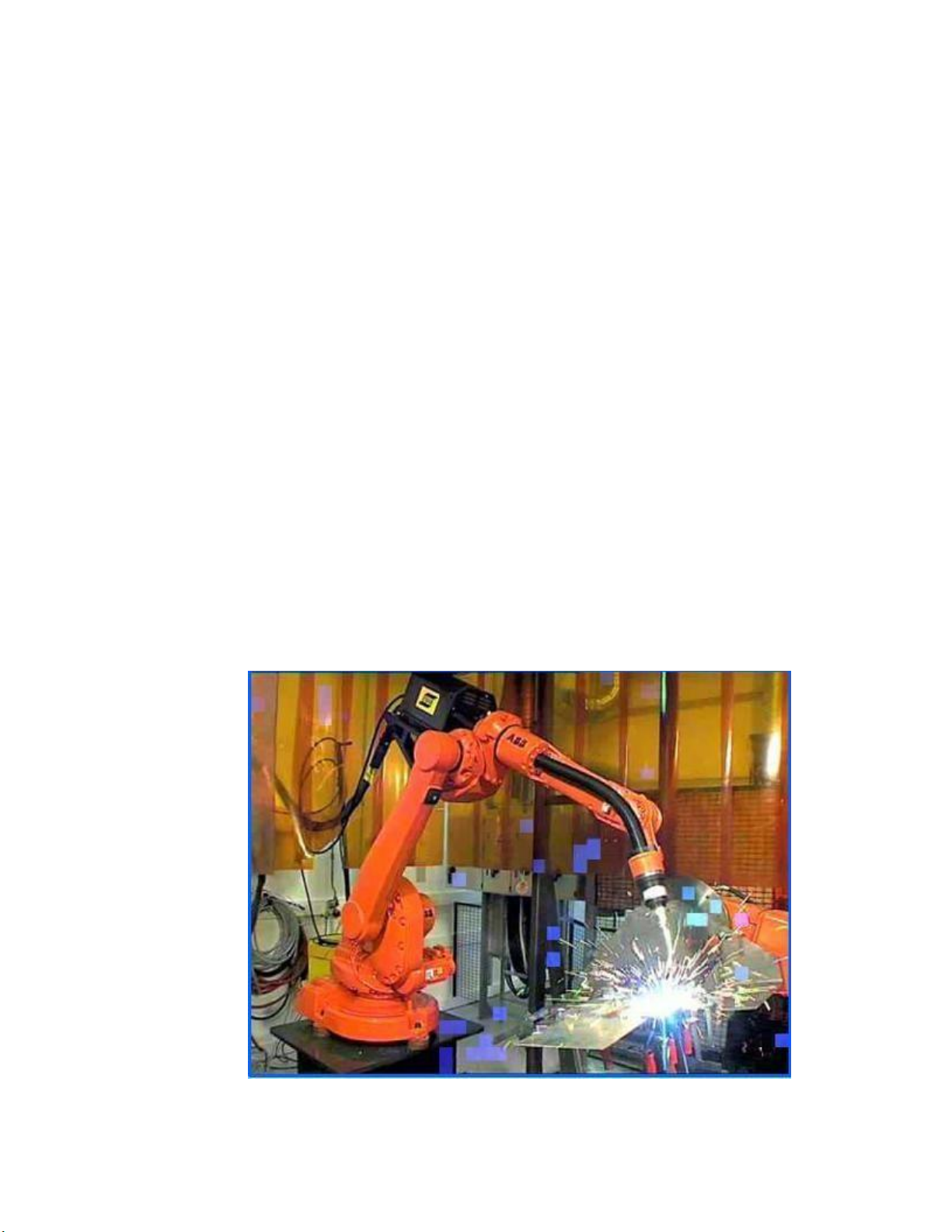
• Robot toạ ộ vuông góc (cartesian robot): robot loại này có ba bậc chuyển
ộng cơ b ản gồm ba chuyển ộng tịnh tiến dọc theo ba trục vuông góc. 6 lO M oARcPSD| 47704698
• Robot toạ ộ trụ (cylindrical robot): ba bậc chuyển ộng cơ b ản gồm hai trục
chuyển ộng tịnh tiến và một trục quay. 7 lO M oARcPSD| 47704698
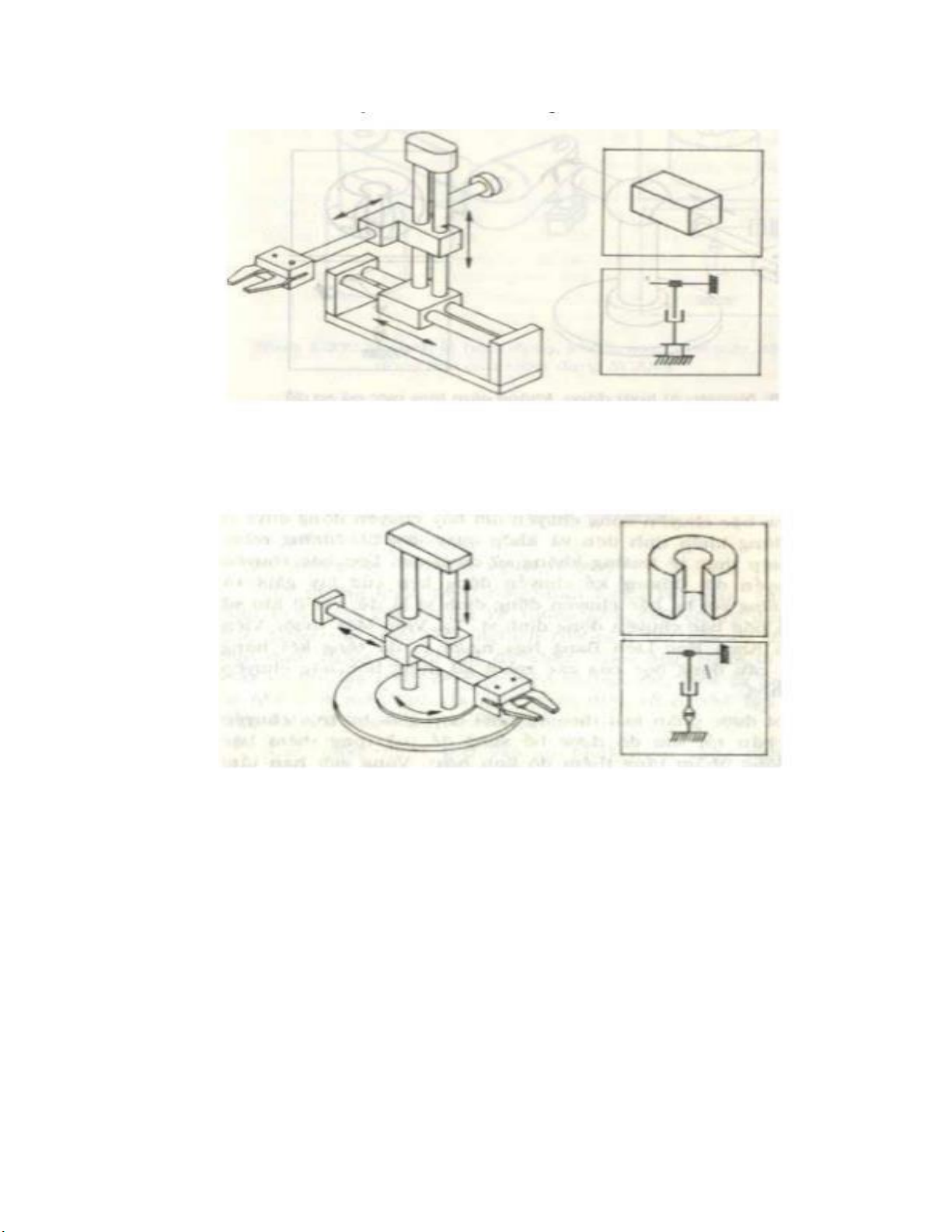
• Robot toạ ộ cầu (spherical robot): ba bậc chuyển ộng cơ bản gồm một trục
tịnh tiến và hai trục quay.
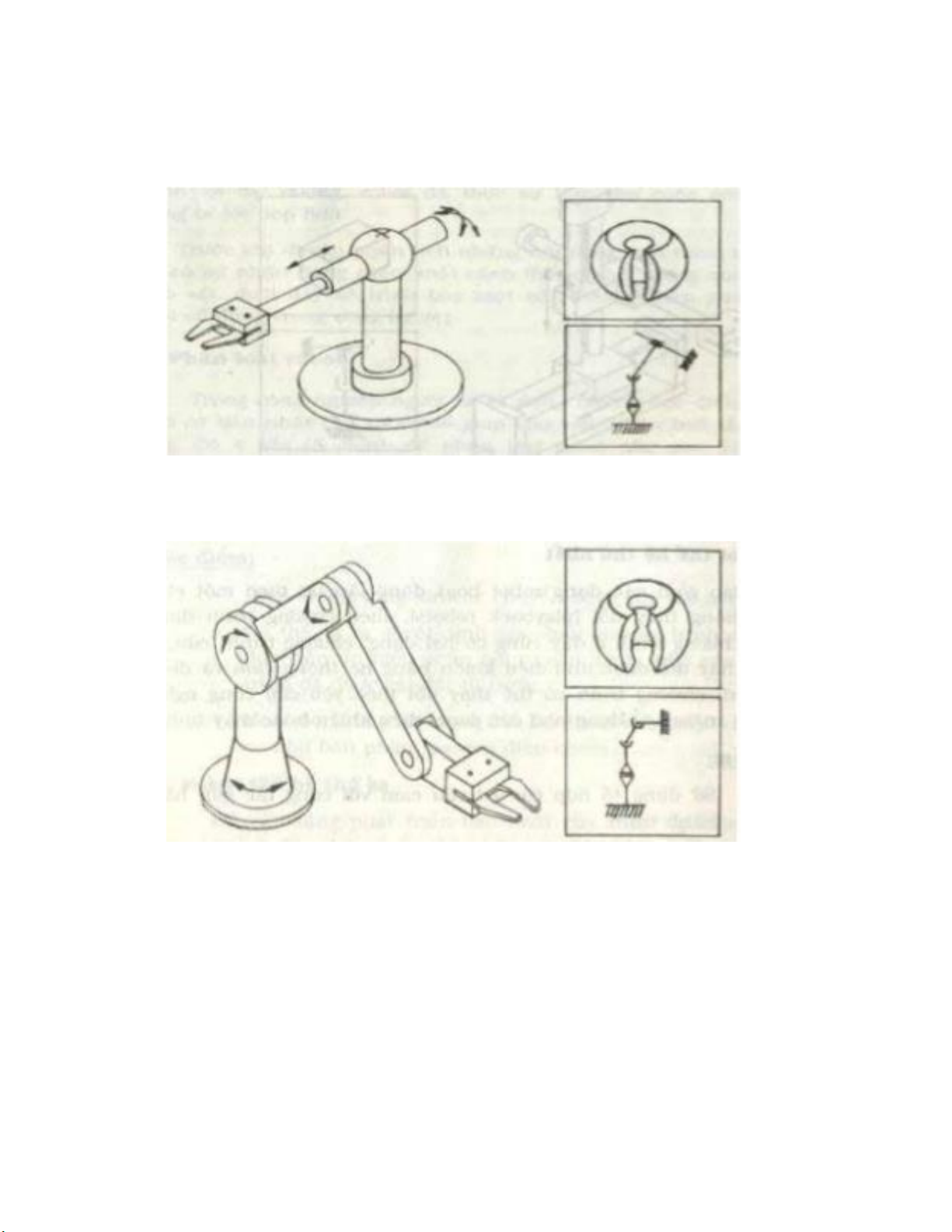
• Robot khớp bản lề (articular robot): ba bậc chuyển ộng cơ b ản gồm ba trục
quay, bao gồm cả kiểu robot SCARA.
1.2.2 Phân loại theo thế hệ
Robot từ lúc ra ời ến giờ ã chải qua 5 giai oạn hình thành và phát triển như hiện tại.
Robot thế hệ thứ nhất: sử dụng cơ cấu cam với công tắc giới hạn hành
trình và iều khiển bằng vòng hở. 8 lO M oARcPSD| 47704698
Robot thế hệ thứ hai: iều khiển bằng vòng kín, tự ưa ra quyết ịnh lựa chọn
chương trình phù hợp nhờ vào từ phản hồi từ cảm biến và lập trình ược.
Robot thế hệ thứ ba: iều khiển hoạt ộng trên cơ sở xử lý thông tin thu nhận
ược từ hệ thống thu nhận hình ảnh (Vision systems - Camera) và có khả năng
nhận dạng ở mức ộ thấp như phân biệt các ối tượng có hình dạng và kích thước khá khác biệt nhau.
Robot thế hệ thứ tư: có khả năng tự ộng lựa chọn chương trình hoạt ộng
và lập trình lại cho các hoạt ộng dựa trên các tín hiệu thu nhận ược từ cảm biến
và bộ iều khiển phải có bộ nhớ tương ối lớn ể giải các bài toán tối ưu với iều
kiện biên không ược xác ịnh trước. Kết quả của bài toán sẽ là một tập hợp các
tín hiệu iều khiển các áp ứng của robot.
Robot thế hệ thứ năm: Là tập hợp những robot ược trang bị trí tuệ nhân
tạo (artificially intel igent robot) rất ưu việt, thay thế ược nhiều hành ộng và xử
lý như con người thông qua quá trình tự học…
1.2.3 Các phân loại Robot khác
Robot gắp – ặt, Robot ường dẫn liên tục, Robot dung nguồn cấp iện, Robot
dung nguồn khí nén, Robot dùng nguồn thủy lực… 9 lO M oARcPSD| 47704698
CHƯƠNG 2: PHÂN TÍCH, LỰA CHỌN CẤU TRÚC VÀ
THIẾT KẾ 3D MÔ HÌNH ROBOT
2.1 PHÂN TÍCH MỤC ĐÍCH, ỨNG DỤNG CỦA ROBOT
Mục ích của robot là nhằm góp phần nâng cao năng suất của dây truyền sản
xuất, giảm thiểu sai số do con người gây ra, ồng thời robot còn có thể hoạt ộng
trong môi trường có iều kiện không thuận lợi. Đạt ược các mục tiêu trên là nhờ
vào khả năng của robot như: làm việc không biết mệt mỏi, làm việc với ộ chính
xác cao, làm việc theo chu trình lặp i lặp lại…
2.2 PHÂN TÍCH YÊU CẦU KỸ THUẬT THAO TÁC
2.2.1 Đối tượng thao tác, dạng thao tác a) Đối tượng thao tác:
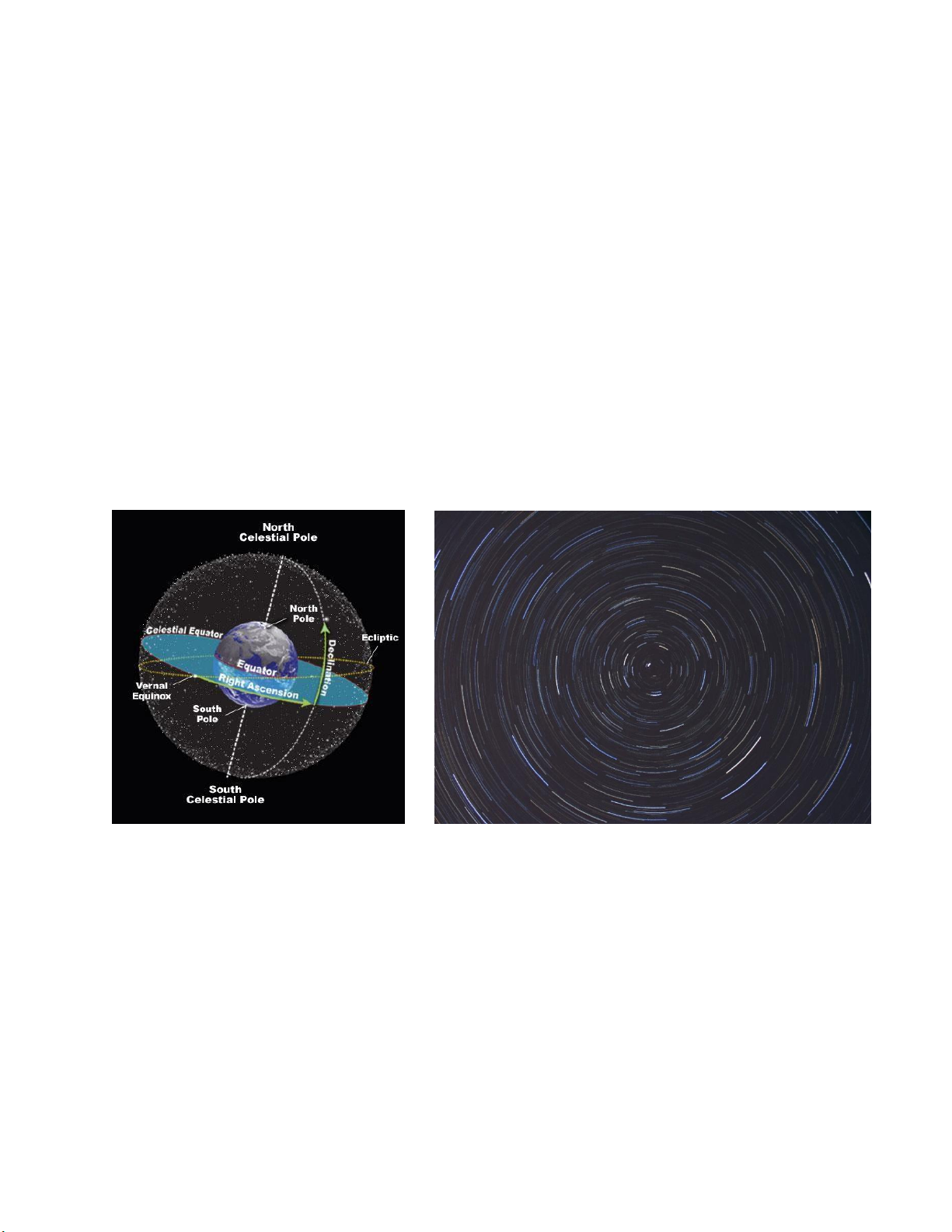
Các ngôi sao trên bầu trời b) Dạng thao tác:
Để có thể quan sát ược 1 ngôi sao cụ thể ta cần thao tác hướng của kính thiên
văn hướng ến vị trí ngôi sao và chuyển ộng quay 1 vòng /ngày giống với quỹ
ạo quay của trái ất ể có thể bắt ược ảnh,quỹ ạo của ngôi sao trong 1 ngày.
2.2.2 Phân tích yêu cầu về vị trí
Do tính ặc biệt của kính thiên văn là chỉ cần quan sát ược vật thể nên chỉ có
sự yêu cầu về hướng của khâu cuối. 10 lO M oARcPSD| 47704698
2.2.3 Yêu cầu về hướng của khâu thao tác và không gian thao tác
Cần 1 trục hướng về phía ngôi sao cần quan sát một trục di chuyển tự do theo chiều quay trái ất
2.2.4 Yêu cầu về vận tốc, gia tốc
Do có thể quan sát trong môi trường ngoài trời nên cần ảm bảo vận tốc ổn ịnh
khi cần ổi ngôi sao quan sát vẫn có thể áp ứng nhanh.
2.3 XÁC ĐỊNH CÁC ĐẶC TRƯNG KỸ THUẬT
2.3.1 Số bậc tự do cần thiết
Yêu cầu của robot là làm việc ược trong không gian nhưng chỉ cần áp ứng
về hướng nên chỉ cần có có 2 bậc tự do chuyển ộng.
2.3.2 Vùng làm việc có thể với tới của robot
Vùng không gian khâu cuối robot có thể với tới trong quá trình làm việc.
2.3.3 Yêu cầu về tải trọng
Đảm bảo hoạt ộng ổn ịnh trong khi khâu cuối mang theo kính thiên văn cùng
chuyển ộng trong iều kiện robot không chịu tác ộng của lực hay momen của
ngoại lực trong quá trình hoạt ộng Với sức nặng của kính thiên văn là 15 kg.
2.4 CÁC PHƯƠNG ÁN THIẾT KẾ CẤU TRÚC ROBOT, LỰA CHỌN
CẤU TRÚC CÁC KHÂU KHỚP
• Phương án 1: Có1 bậc tự do gồm 2 khâu quay 11 lO M oARcPSD| 47704698
• Phương án 2: Có 2 bậc tự do gồm 1 khâu quay 1 khâu tịnh tiến
• Phương án 3: Gồm 2 bậc tự do gồm 2 khâu quay 12 lO M oARcPSD| 47704698
Với ề bài này nhóm em quyết ịnh phương án 3 robot có 2 bậc tự do vì chỉ
với 2 bậc tự do ta có thể áp ứng yêu cầu về hướng của khâu cuối trong không
gian khâu 1 quay áp ứng yêu cầu về góc hướng về phía bắc khâu 2 quay áp ứng
yêu cầu hướng của ngôi sao theo chu kì quay 1 ngày của Trái Đất.
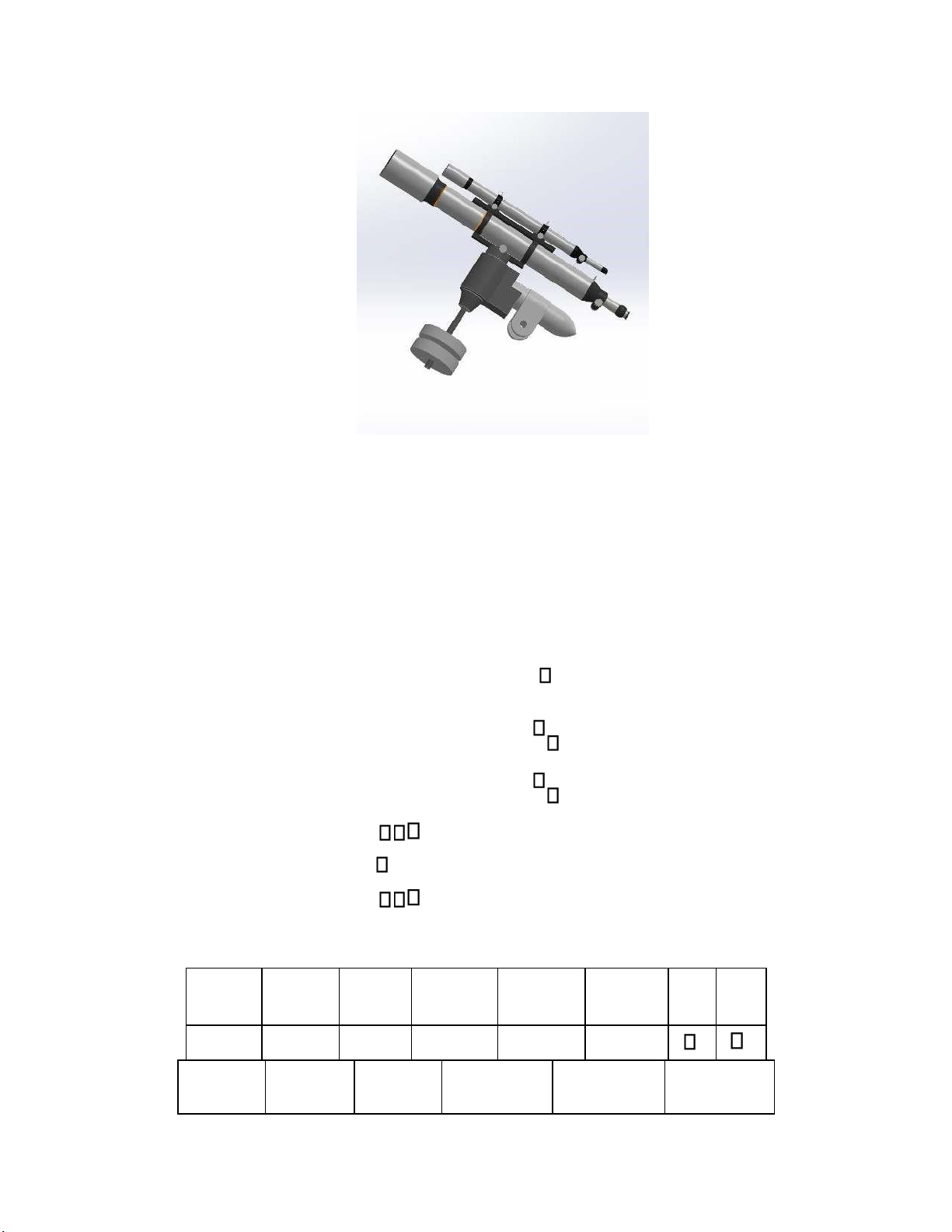
2.5 THIẾT KẾ MÔ HÌNH 3D ROBOT
Các ặc trưng hình học của robot
Robot chỉ có yêu cầu về hướng thao tác d = 1 600
Ta sẽ chọn 1 bộ số thỏa mãn yêu cầu trên: d = 2 300 a = 2 600 = 1 360o
Giới hạn các biến khớp: o = 2 360
Các ặc trung kỹ thuật:
d m1( ) d m2( ) a m2( ) ) m kg m kg 2( ) q1 q2 0( m kg1( ) 0,6 0,3 0,6 11,89 12,56 15 1 2 2 2 x ( ) 2 y( ) 2 z ( ) 2 x ( . ) 2 y( . ) z ( . ) F N M Nm 13 lO M oARcPSD| 47704698 F N F N M N m M N m 0 0 0 0 0 0
CHƯƠNG 3: THIẾT KẾ QUỸ ĐẠO CHUYỂN ĐỘNG
3.1 KHẢO SÁT ĐỘNG HỌC THUẬN, KHẢO SÁT ĐỘNG HỌC NGƯỢC
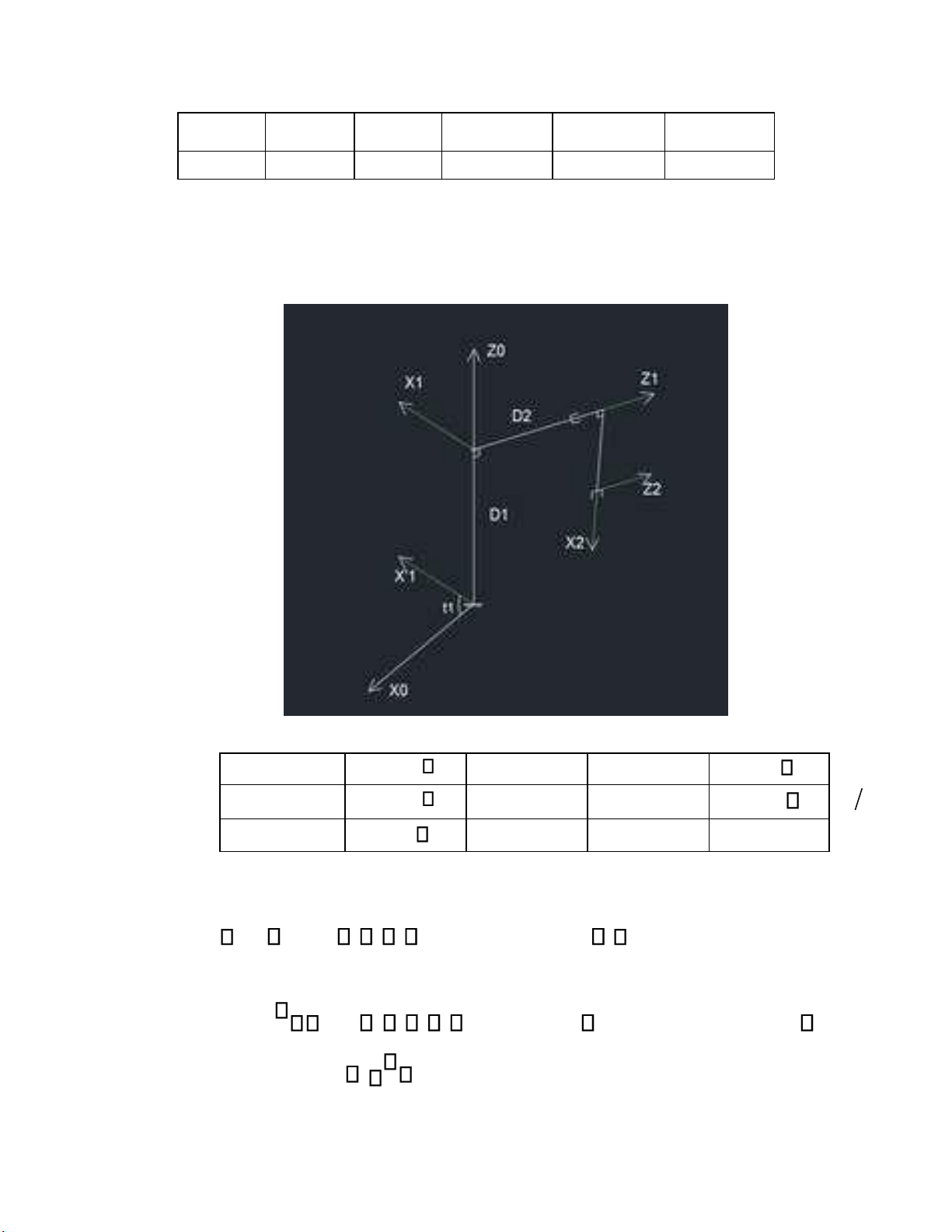
3.1.1 Khảo sát ộng học thuận Bảng DH: Joint i di ai i 1 1 d1 0 2 2 2 d2 a2 0
Theo quy tắc DH, ta có ma trận biến ổi tọa ộ thuần nhất là: cos − i cos
isin i sin isin i aci os i = i−1Ai sin0 i
cossinic osi i
sincosic osi i asi dini i 14 lO M oARcPSD| 47704698 0 0 0 1
Lần lượt thay các hàng của bảng thông số ộng học vào ma trận trên ta ược các
ma trận truyền tương ứng với các khâu: 0 c1 s1 c2 s2 a c2 2 0 c2 0 a s2 2 − 0 s1 0 −c10 1A2 s02 1 d A 2 1 0 1 0 d1 0 1 0 0 0 1 0
Nhân các ma trân với nhau ta có ược: a cc + 2 1 2 d s2 cc − 1 2 cs1 2 s1 − 1 a sc2 1 2 d − − c + 2 1 d1 a 12
scs1 22 css1 22 0c1 = 0A A1 s2 2 Hướng của A hệ tọa ộ khâu thao tác: Được xác ịnh từ 0 0 0 các góc Cardan
với ma trận biểu diễn như sau: c c −c s s ( ) 0R pE s s c +c s−s s s +c c−s c c s c
+s sc s s +s c c c Để tính ược các góc
,, ta so sánh với ma trận quay của khâu cuối: 15 lO M oARcPSD| 47704698 cc − 1 2 cc1 2 s1 0 ss − − 1 2 ss1 2 c1 R2 s2 c2 0
Giải hệ phương trình ta ược các góc như sau: =90o = 1 = 2 x = + E
a cc2 1 2 d s2 1 =
Tọa ộ iểm tác ộng cuối E: r = − E
yE a sc2 1 2 d c2 1 z = + −− E d1 a s2 2 a csa ss2 1 a sc + 2 2 1 2 d c2 1 2 1 2 = 12
Vận tốc iểm tác ộng cuối: v = + E rE a cc2 1 2 d s2 1 0 a c2 2 16 lO M oARcPSD| 47704698 1 = 0 0 0
Gia tốc iểm tác ộng cuối: a = + E vE
a cc2 1 2 d s2 1 0 Ma trận quay: − c − 1 0 s1 cc1 2 cs1 2 s1 = −ss1 2 −c1 = 0R1 s1 0 −c1 0R2 sc1 2 c2 1 0 1 0 s 0 2 1 2sc c sc1 2 1 s1 0 cc1 2 s2 − 2 1 −ss 0R1T 0 0 1 0R2T 1 2 c2 cs − 1 2 s1 c1 0 − 2 c1 cs 1 0 s1 1 2ss a sc + 2 1 2 d c2 1 − 2 1 2cc 1 1c 0R2 1 1 1 1s 0 1 1c 2cc 0R 1 1c 0 1 1s − 2 1 17 lO M oARcPSD| 47704698 2ss −
1 1 2cs − 2 1 2sc 1 1s − 2c2 2s2 0
Các ma trận sóng tương ứng: 0 − 1 0 = 1 0R R1.01T 1 0 0 0 0 0
−−a csa ss2 1 22 1 2 12 a c2 2 18 lO M oARcPSD| 47704698 0 − − 1 c12 x s1 2 = 2 0R R2.02T 1 0 −s1 2 2 c1 2 s1 2 0 y c1 2 x 0 z
Vận tốc khâu thao tác: 1 = y 0 1 z 1
3.1.2 Khảo sát ộng học ngược
Cho tọa ộ khâu cuối E: x = + E
a cc2 1 2 d s2 1 y = − E
a sc2 1 2 d c2 1 z = + E a s2 2 d1 s = zEa−2d1 2 c + 2 xE2 −
ay2E2 d22 = 2 19 lO M oARcPSD| 47704698 x = + E a c c2 2 1 d s2 =− + 1 E d c2 1 a c s2 2 1 y
2 arctan2(s ,2 2c )
Giải hệ phương trình ại số tuyến tính: 2 ac−2 =( ) + = + 2d2 acd2 2 ac2 2 2
d22 xE2 yE2 x = − E d2
x acE 2 2 y dE 2 yE ac2 2 −d =− − 2 xE
d y2 E x acE 2 2 ac2 2 yE c = +− 1 x a cE x2E2 2 yy dE2E 2 = s1 −d y +− 2 xEE2 x a cyEE2 2 2
1 arctan2(s ,1 1c )
Vậy ta ã xác ịnh ược các góc của từng khớp thông qua phương pháp Cardan.
3.1.3 Không gian làm việc
Với kích thước khâu ã ược xác ịnh từ trước và giới hạn các khớp ta xác ịnh
không gian làm việc của Robot như sau: 20
Tài liệu liên quan:
-

SQL Server Developer Interview Test: T-SQL Assessment Guide Môn Công nghệ thông tin | Trường Đại học Huế
107 54 -

Đề bài Kiểm Tra Điều Kiện - Luật Thương Mại 1&2 Môn Công nghệ thông tin | Trường Đại học Huế
76 38 -

Hệ thống Tưới Cây Tự Động IoT - Bài Tiểu Luận Nhóm 9 Môn Công nghệ thông tin | Trường Đại học Huế
156 78 -

Tài Liệu Yêu Cầu Dự Án Quản Lý Hồ Sơ Sinh Viên Môn Công nghệ thông tin | Trường Đại học Huế
116 58 -

Khóa Luận Tốt Nghiệp K45: Xây Dựng Website Đặt Lịch Khám Tại Huế Sử Dụng Môn Công nghệ thông tin | Trường Đại học Huế
155 78