Báo cáo bài tập lớn: Mô phỏng điều khiển xe bằng giọng nói và cảm biến môn IoT và ứng dụng | Học viện Công Nghệ Bưu Chính Viễn Thông
Hiện nay, điều khiển phương tiện bằng tay vẫn là phương pháp phổ biến, tuy nhiên điều này có thể gây ra nhiều rủi ro, đặc biệt là khi người điều khiển gặp khó khăn về sức khỏe hoặc môi trường lái xe không thuận lợi. Tài liệu được sưu tầm, biên soạn dưới dạng file PDF gồm 38 trang, giúp các bạn học tốt, ôn tập hiệu quả, đạt kết quả cao trong các bài thi, bài kiểm tra sắp tới. Mời bạn đón xem!
Môn: IoT và ứng dụng 143 tài liệu
Trường: Học viện Công Nghệ Bưu Chính Viễn Thông 1.8 K tài liệu
Tác giả:











Preview text:
lOMoAR cPSD| 58647650 lOMoAR cPSD| 58647650 LỜI MỞ ĐẦU
Trước tiên, nhóm em xin gửi lời cảm ơn chân thành ến cô Trần Thị Thanh Thủy ã
truyền ạt kiến thức và tạo iều kiện thuận lợi ể nhóm em thực hiện ề tài này.
Trong thời ại công nghệ 4.0, Internet of Things (IoT) ã trở thành một xu hướng phát
triển mạnh mẽ, ứng dụng vào nhiều lĩnh vực của cuộc sống, ặc biệt là trong việc tự ộng hóa
và iều khiển thông minh. Đề tài “Điều khiển xe bằng giọng nói và phát hiện vật cản ” hướng
ến việc tìm hiểu một hệ thống xe tự ộng có khả năng nhận lệnh từ giọng nói và tự ộng phát
hiện các vật cản trên ường i. Đây là một giải pháp tiềm năng giúp tăng cường an toàn giao
thông và mang lại sự tiện lợi cho người sử dụng, ặc biệt trong các môi trường ặc thù như
các khu vực công nghiệp, bãi ỗ xe hay khu dân cư.
Trong quá trình nghiên cứu và thực hiện ề tài, chúng em không thể tránh khỏi những
thiếu sót và hạn chế. Chúng em rất mong nhận ược sự góp ý và hướng dẫn từ cô ể hoàn
thiện ề tài một cách tốt nhất.
Chúng em xin chân thành cảm ơn! lOMoAR cPSD| 58647650 MỤC LỤC
LỜI MỞ ĐẦU .....................................................................................................................
1 DANH MỤC HÌNH ẢNH
.................................................................................................. 3
CHƯƠNG I. TỔNG QUAN HỆ THỐNG........................................................................ 4
I.1. Giới thiệu hệ thống iều khiển xe bằng giọng nói và phát hiện vật cản: ....................... 4
I.1.1. Đặt vấn ề : ................................................................................................................................ 4
I.1.2. Mục tiêu của hệ thống : .............................................................................................................. 4
I.2. Xác ịnh chức năng của hệ thống .................................................................................................................5
CHƯƠNG II. PHÂN TÍCH VÀ THIẾT KẾ HỆ THỐNG ........................................... 11
II.1. Kiến trúc tổng quan của hệ thống .................................................................................. 11
II.1.1. Các thành phần trong hệ thống ............................................................................................... 11
II.1.2. Luồng xử lý: ............................................................................................................................ 11
II.2. Đặc tả yêu cầu .................................................................................................................. 12
II.2.1. Yêu cầu chức năng: ................................................................................................................. 12
II.2.2. Yêu cầu quản lý hệ thống: ...................................................................................................... 12
II.2.3. Yêu cầu phân tích dữ liệu: ...................................................................................................... 13
II.2.4. Yêu cầu triển khai ứng dụng: .................................................................................................. 14
II.3. Đặc tả tiến trình ............................................................................................................... 15
II.4. Mô tả mô hình thông tin.................................................................................................. 16
II.5. Đặc tả chức năng .............................................................................................................. 16
II.6. Chi tiết thành phần hệ thống .......................................................................................... 18
II.6.1. Thiết bị sử dụng ...................................................................................................................... 18
II.6.2. Công nghệ sử dụng ................................................................................................................. 23
II.7. Sơ ồ kết nối thiết bị ........................................................................................................ 25
CHƯƠNG III. TRIỂN KHAI HỆ THỐNG ................................................................... 26
III.1. Code ARDUINO ............................................................................................................. 26
CHƯƠNG IV. THỰC NGHIỆM VÀ ĐÁNH GIÁ KẾT QUẢ .................................... 39 lOMoAR cPSD| 58647650
IV.1. Hình ảnh hệ thống sau khi lắp ráp ................................................................................ 39
IV.2. Giao diện ứng dụng......................................................................................................... 40
TÀI LIỆU THAM KHẢO ............................................................................................... 42
DANH MỤC HÌNH ẢNH
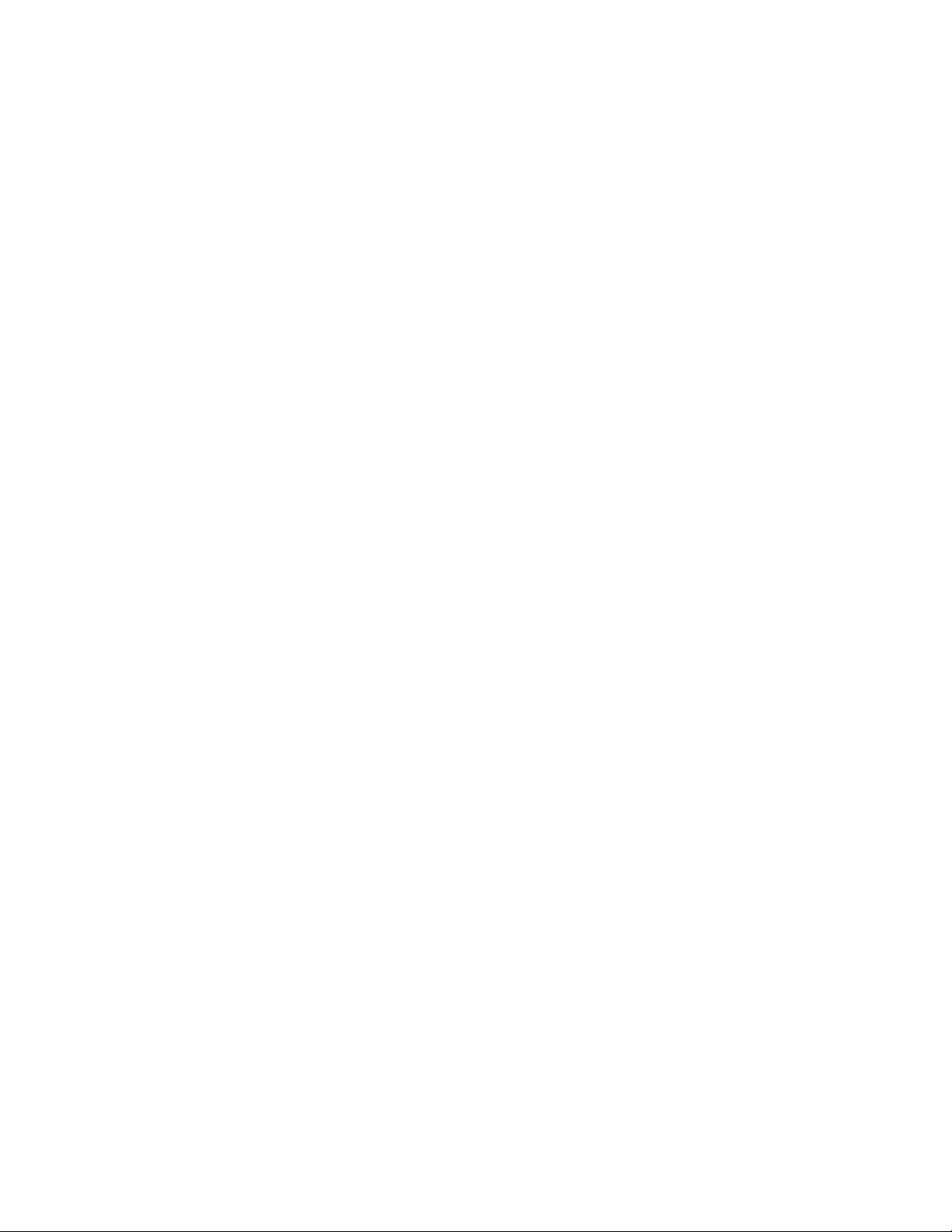
Hình 1 Giao thức HTTP với ThingSpeak ............................................................................. 7
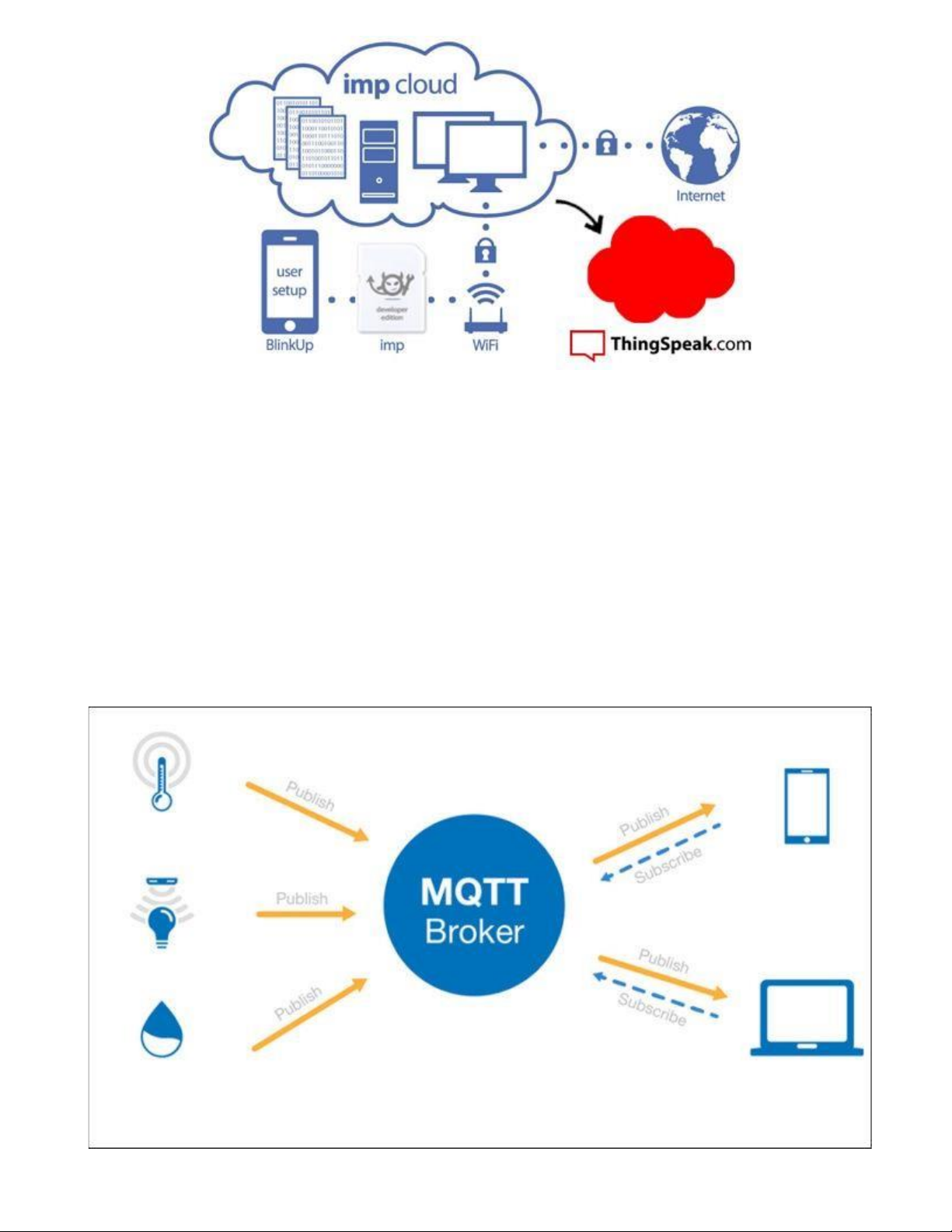
Hình 2 Giao thức MQTT ...................................................................................................... 8
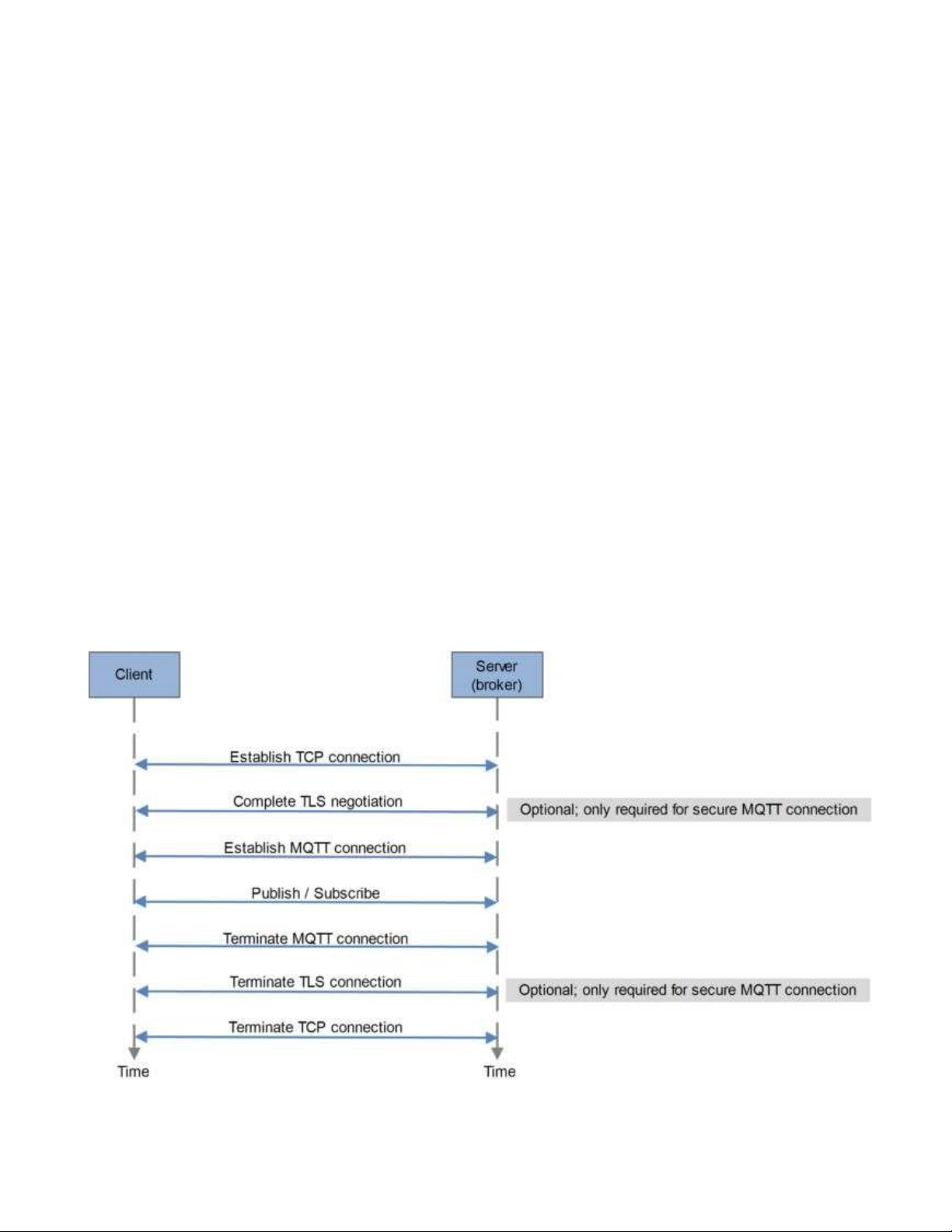
Hình 3 Cơ chế hoạt ộng của giao thức MQTT ..................................................................... 8
Hình 4 Đặc tả tiến trình ....................................................................................................... 13
Hình 5 Mô tả mô hình thông tin ......................................................................................... 14
Hình 6 Đặc tả chức năng ..................................................................................................... 15
Hình 7 Khung mô hình xe ô tô............................................................................................ 16
Hình 8 Mạch ESP32-WROOM-32D .................................................................................. 16
Hình 9 Module iều khiển ộng cơ 12V L298N .................................................................... 18
Hình 10 Cảm Biến Siêu Âm HC-SR04 .............................................................................. 19
Hình 11 Sơ ồ kết nối thiết bị ............................................................................................... 22
Hình 12 Khai báo các thư viện ........................................................................................... 23
Hình 13 Kết nối mạng Wi-Fi .............................................................................................. 23
Hình 14 Thông tin ThingSpeak ........................................................................................... 24
Hình 15 Thông tin MQTT ................................................................................................... 24
Hình 16 Khai báo các chân iều khiển ộng cơ L298N ......................................................... 25
Hình 17 Kết nối cảm biến HC-SRF04 ................................................................................ 25
Hình 18 Hàm setup() ........................................................................................................... 26
Hình 19 Hàm callback() ...................................................................................................... 27
Hình 20 Hàm loop() iều khiển chính .................................................................................. 28
Hình 21 Cảm biến siêu âm .................................................................................................. 28
Hình 22 Phản hồi khi kết nối thành công ............................................................................ 29
Hình 23 Hàm kết nối tới MQTT broker .............................................................................. 30
Hình 24 Hàm iều khiển i thằng ........................................................................................... 31
Hình 25 Hàm iều khiên rẻ trái............................................................................................. 32
Hình 26 Hàm iều khiển rẻ phải ........................................................................................... 33
Hình 27 Hàm iều khiển lùi khi gặp vật cản ........................................................................ 33
Hình 28 Hàm iều khiển i lùi ................................................................................................ 34
Hình 29 Hàm iều khiển xe xoay vòng ................................................................................ 34
Hình 30 Hàm iều khiển xe dừng lại .................................................................................... 34
Hình 31 Hệ thống sau khi lắp ráp ....................................................................................... 35
Hình 32 Giao diện ứng dụng hệ thống ................................................................................ 36 lOMoAR cPSD| 58647650
CHƯƠNG I. TỔNG QUAN HỆ THỐNG
Chương ầu tiên sẽ giới thiệu khái quát về hệ thống iều khiển xe bằng giọng nói và
phát hiện vật cản. Nội dung tập trung trình bày nguyên nhân và mục tiêu thiết kệ hệ thống
ồng thời trình bày các thành phần chính của hệ thống, nguyên lý hoạt ộng và những lợi
ích mà nó mang lại. Cung cấp góc nhìn khái quát cho việc phát triển và ứng dụng hệ thống trong thực tế.
I.1. Giới thiệu hệ thống iều khiển xe bằng giọng nói và phát hiện vật cản: I.1.1. Đặt vấn ề :
Trong bối cảnh công nghệ phát triển nhanh chóng, việc ứng dụng các giải pháp
tự ộng hóa và thông minh vào ời sống ngày càng trở nên quan trọng. Một trong
những lĩnh vực ược chú trọng là giao thông và vận tải, nơi mà các phương tiện có
khả năng tự ộng hóa và hỗ trợ thông minh có thể mang lại nhiều lợi ích, từ việc tăng
cường an toàn giao thông ến cải thiện hiệu suất vận hành.
Hiện nay, iều khiển phương tiện bằng tay vẫn là phương pháp phổ biến, tuy
nhiên iều này có thể gây ra nhiều rủi ro, ặc biệt là khi người iều khiển gặp khó khăn
về sức khỏe hoặc môi trường lái xe không thuận lợi. Đồng thời, các tai nạn do va
chạm với chướng ngại vật thường xảy ra do sự thiếu sót trong nhận biết môi trường
xung quanh. Chính vì vậy, việc nghiên cứu và phát triển một hệ thống iều khiển
phương tiện thông minh, tích hợp các công nghệ như nhận diện giọng nói và phát
hiện vật cản tự ộng, trở nên cấp thiết hơn bao giờ hết.
Hệ thống iều khiển xe bằng giọng nói và phát hiện vật cản dựa trên công nghệ
IoT ược ề xuất với mục tiêu giải quyết những vấn ề nêu trên. Bằng cách sử dụng các
cảm biến và công nghệ nhận diện giọng nói, hệ thống này không chỉ giúp người dùng
iều khiển phương tiện một cách dễ dàng hơn mà còn ảm bảo an toàn khi vận hành
trong các iều kiện phức tạp. Điều này mở ra tiềm năng cho việc áp dụng hệ thống
vào nhiều lĩnh vực khác nhau như giao thông công cộng, xe tự hành trong các nhà
máy sản xuất, hoặc các khu vực khó tiếp cận.
I.1.2. Mục tiêu của hệ thống :
Mục tiêu chính của hệ thống iều khiển xe bằng giọng nói và phát hiện vật cản
là tạo ra một phương tiện có khả năng tự ộng hóa cao, giúp người dùng iều khiển xe
một cách dễ dàng, an toàn và tiện lợi. Cụ thể, hệ thống hướng ến những mục ích sau:
Điều khiển bằng giọng nói: Hệ thống cho phép người dùng iều khiển xe thông
qua các lệnh giọng nói, giúp giảm thiểu sự phụ thuộc vào thao tác tay, từ ó tăng
cường sự thuận tiện và an toàn, ặc biệt trong những tình huống khó khăn hoặc khi
người iều khiển gặp trở ngại về di chuyển.
Phát hiện và tránh vật cản: Hệ thống tích hợp cảm biến ể phát hiện các vật cản
trên ường i. Khi nhận diện ược chướng ngại vật, hệ thống sẽ tự ộng ưa ra cảnh báo lOMoAR cPSD| 58647650
và thực hiện các thao tác tránh né nhằm ảm bảo an toàn cho phương tiện và người sử dụng.
Ứng dụng công nghệ IoT: Hệ thống kết nối với mạng lưới IoT ể nâng cao tính
năng tự ộng hóa, thu thập và phân tích dữ liệu từ các cảm biến nhằm tối ưu hóa quá
trình iều khiển xe và nâng cao hiệu quả vận hành.
Tăng cường an toàn giao thông: Bằng cách kết hợp giữa iều khiển giọng nói
và tự ộng phát hiện vật cản, hệ thống giúp giảm thiểu tai nạn giao thông, ặc biệt trong
những môi trường nguy hiểm hoặc trong các tình huống khẩn cấp.
Ứng dụng trong nhiều lĩnh vực: Hệ thống có thể ược ứng dụng rộng rãi trong
các môi trường như khu công nghiệp, bãi ỗ xe, khu dân cư hoặc các khu vực có ịa
hình phức tạp, từ ó góp phần phát triển các giải pháp thông minh cho giao thông trong tương lai
I.2. Xác ịnh chức năng của hệ thống
Hệ thống iều khiển xe bằng giọng nói và phát hiện vật cản có các chức năng chính sau: Nhận diện giọng nói:
o Hệ thống có khả năng nhận diện và xử lý các lệnh giọng nói từ người
dùng. Các lệnh này bao gồm các thao tác cơ bản như tiến, lùi, rẽ trái, rẽ phải và dừng xe.
Xử lý lệnh iều khiển:
o Sau khi nhận diện lệnh giọng nói, hệ thống sẽ xử lý và chuyển ổi các lệnh
thành tín hiệu iều khiển cho xe. Điều này bao gồm việc iều chỉnh tốc ộ,
hướng di chuyển và các hành ộng khác dựa trên lệnh người dùng. Phát hiện vật cản:
o Hệ thống ược trang bị cảm biến siêu âm ể phát hiện vật cản phía trước của xe.
o Khi phát hiện vật cản, hệ thống sẽ ưa ra cảnh báo và kích hoạt các hành
ộng phòng ngừa như dừng xe hoặc chuyển hướng ể tránh va chạm.
Tự ộng dừng xe khi gặp chướng ngại vật:
o Nếu vật cản ược phát hiện quá gần và xe không thể chuyển hướng hoặc
không thể thực hiện thao tác tránh né kịp thời, hệ thống sẽ tự ộng dừng xe
ể ảm bảo an toàn cho phương tiện và người sử dụng.
Tương tác thời gian thực:
o Hệ thống có khả năng xử lý và phản hồi các lệnh giọng nói và dữ liệu từ
cảm biến trong thời gian thực, ảm bảo xe hoạt ộng mượt mà và hiệu quả.
Ghi nhận dữ liệu và phân tích: lOMoAR cPSD| 58647650
o Hệ thống có thể ghi nhận và lưu trữ các dữ liệu liên quan ến quá trình iều
khiển và các tình huống phát hiện vật cản. Dữ liệu này có thể ược sử dụng
ể phân tích và tối ưu hóa hoạt ộng của hệ thống trong tương lai.
Kết nối IoT và iều khiển từ xa:
o Hệ thống ược tích hợp với mạng IoT, cho phép người dùng theo dõi và
iều khiển xe từ xa thông qua các thiết bị di ộng hoặc máy tính kết nối Internet.
Cảnh báo âm thanh và hình ảnh:
o Khi phát hiện vật cản hoặc có lỗi trong quá trình vận hành, hệ thống sẽ
phát ra các cảnh báo hình ảnh ể thông báo cho người iều khiển kịp thời xử lý.
I.3. Cơ cở lý thuyết I.3.1. Giao thức HTTP
HTTP (HyperText Transfer Protocol) là một giao thức lớp ứng dụng cho các hệ
thống thông tin siêu phương tiện phân tán, cộng tác. Là nền tảng của truyền thông
dữ liệu cho world wide web, nơi siêu văn bản tài liệu bao gồm các siêu liên kết ến
các tài nguyên khác mà người dùng có thể dễ dàng truy cập Thành phần :
HTTP Session: HTTP Session giúp duy trì trạng thái người dùng giữa các yêu
cầu HTTP, cho phép quản lý thông tin ăng nhập mà không cần ăng nhập lại, nâng
cao bảo mật và trải nghiệm người dùng.
HTTP Request Methods: Các phương thức chủ yếu của HTTP bao gồm:
• GET: Lấy thông tin từ server.
• HEAD: Nhận header mà không có nội dung.
• POST: Gửi dữ liệu ến server, có thể thay ổi trạng thái.
• PUT: Cập nhật tài nguyên.
• DELETE: Xóa tài nguyên.
• CONNECT: Thiết lập ường hầm tới server.
• OPTIONS: Thông báo các phương thức hỗ trợ.
• TRACE: Kiểm tra thông iệp tới tài nguyên.
I.3.1. Giao thức HTTP với ThingSpeak
Đây là cách phổ biến nhất ể gửi và nhận dữ liệu từ ThingSpeak. Sử dụng yêu
cầu GET hoặc POST qua HTTP ể tương tác với API của ThingSpeak.
Gửi dữ liệu lên ThingSpeak (HTTP POST/GET):
Để gửi dữ liệu ến một kênh (channel) trên ThingSpeak, sử dụng yêu cầu GET hoặc
POST HTTP cần có API Key ể xác thực và kênh cần có các trường dữ liệu (fields). lOMoAR cPSD| 58647650
Hình 1 Giao thức HTTP với ThingSpeak
ThingSpeak là một nền tảng cloud cho phép bạn lưu trữ và quản lý dữ liệu
cảm biến từ xa. Thay vì lưu dữ liệu cục bộ trên thiết bị Arduino, việc gửi lên cloud
giúp truy cập và quản lý dữ liệu từ bất kỳ âu có kết nối internet. I.3.2. Giao thức MQTT
Giao thức MQTT (Message Queuing Telemetry Transport) là một giao thức
lớp ứng dụng dùng ể truyền giữa liệu qua mạng internet. Vai trò của các thiết bị trong
giao thức MQTT là thiết bị ăng kí chủ ề (subscriber), thiết bị xuất bản chủ ề
(publisher) và người môi giới trung gian (broker), với phương thức trao ổi dữ liệu
kiểu ăng kí và xuất bản. MQTT sử dụng hệ thống chủ ề (topic) ược xem là các hàng
chờ gói tin ược quản lý bởi thiết bị có vai trò là người môi giới trung gian. lOMoAR cPSD| 58647650
Hình 2 Giao thức MQTT
Thành phần của MQTT Thành phần chính của MQTT là Client
(Publisher/Subscriber), Server (Broker), Sessions, Subscriptions và Topics. Trong ó:
• Client sẽ subcribe từ một hay nhiều topics với mục ích nhận thông iệp từcác topic
tương ứng, và publish 1 hay nhiều topic với mục ích gửi thông iệp.
• Server: Broker sẽ nhận các thông tin subcribe từ Client hay các thông iệp và dựa
vào Subscriptions từ Client ể chuyển chúng ến các subscriber tương ứng.
• Topic là một hàng ợi các thông iệp và có sẵn khuôn mẫu dành cho Subscriber
hoặc Publisher, cho phép Client trao ổi thông tin với các ngữ nghĩa ã ược ịnh
nghĩa sẵn. Một ví dụ ơn giản mà có thể thấy rõ về Topic của MQTT là dữ liệu
cảm biến nhiệt ộ của tòa nhà.
• Session ược ịnh nghĩa là một kết nối từ Client tới Server, toàn bộ giao tiếp của
Client với Server ều là một phần của Session.
• Subscription là kết nối từ Client tới Topic, Client có thể nhận hoặc gửi thông iệp
với Topic ó. Tổng quan về cách hoạt ộng của MQTT như sau: Khi khi 1 thiết bị
(Ví dụ: cảm biến) publish 1 dữ liệu vào 1 topic gửi lên Broker, lúc này Broker sẽ
quản lý topic ó, gửi dữ liệu ó ến 1 thiết bị subcribe topic trên.
Cơ chế hoạt ộng của giao thức MQTT
Hình 3 Cơ chế hoạt ộng của giao thức MQTT
Một phiên MQTT ược chia thành bốn giai oạn: kết nối, xác thực, giao tiếp và kết thúc. lOMoAR cPSD| 58647650
1. Client (máy khách) bắt ầu bằng cách tạo kết nối Transmission Control
Protocol/Internet Protocol (TCP/IP) tới broker bằng cách sử dụng cổng tiêu
chuẩn hoặc cổng tùy chỉnh ược xác ịnh bởi các nhà phát triển broker.
2. Các cổng tiêu chuẩn là 1883 cho giao tiếp không mã hóa và 8883 cho giao
tiếp ược mã hóa – sử dụng Lớp cổng bảo mật (SSL) / Bảo mật lớp truyền tải
(TLS). Trong quá trình giao tiếp SSL/TLS, máy khách cần kiểm chứng và xác thực máy chủ.
3. Sau ó, Client sẽ gửi bản tin lên broker nếu là Publisher hoặc nhận bản tin từ
broker về nếu là Subscriber. Quá trình kết nối này sẽ ược giữ ến khi Kết thúc kết nối.
4. Sau khi kết thúc ể có thể truyền nhận MQTT, chúng ta lại tiếp tục quay lại các bước trên.
CHƯƠNG II. PHÂN TÍCH VÀ THIẾT KẾ HỆ THỐNG
Chương này sẽ tập trung vào việc phân tích và thiết kế hệ thống iều khiển xe bằng
giọng nói và phát hiện vật cản. Nội dung bao gồm việc xác ịnh yêu cầu hệ thống, các mô
hình ặc tả, xác ịnh các kiến trúc phần mềm và phần cứng, kết nối phần cứng và tích hợp
ứng dụng ể hoàn thiện ược sản phần.
II.1. Kiến trúc tổng quan của hệ thống
II.1.1. Các thành phần trong hệ thống • Phần cứng: Xe ô tô lOMoAR cPSD| 58647650 Module ESP32
Module iều khiển ộng cơ L298N Cảm biến siêu âm PIN • Hệ thống:
Giao diện người dùng: HTML, CSS, JavaScript Server: Flask Python Giao thức: MQTT, HTTP Lưu trữ: ThingSpeak Arduino IDE II.1.2. Luồng xử lý:
1. Người dùng gửi yêu cầu trên dịch vụ webservice
2. Yêu cầu của người dùng ược gửi ến server (Flask)
3. Server thực hiện yêu cầu của người dùng: Xử lý dữ liệu, xử lý yêu cầu, gửi
yêu cầu của người dùng ến ESP32.
4. ESP32 thực hiện yêu cầu từ server, iều khiển ộng cơ ô tô L298N
5. Với cảm biến siêu âm, dữ liệu khoảng cách giữa vật cản gần nhất ược ẩy
lên Cloud (ThingSpeak) liên tục.
6. Server lấy dữ liệu từ ThingSpeak và hiển thị lên cho người dùng cuối các
thông số giám sát và cảnh báo.
II.2. Đặc tả yêu cầu
II.2.1. Yêu cầu chức năng:
Yêu cầu chức năng của hệ thống là các yêu cầu liên quan ến các hành ộng và
thao tác mà hệ thống cần thực hiện ể áp ứng mục ích ề ra. • Nhận diện giọng nói:
o Hệ thống phải có khả năng nhận diện và phân tích các lệnh giọng nói
như "tiến", "lùi", "rẽ trái", "rẽ phải", "dừng", v.v. o Hệ thống phải
hoạt ộng với ộ chính xác cao và có thể nhận diện giọng nói trong
môi trường có ộ nhiễu âm thanh. •
Xử lý lệnh iều khiển:
o Sau khi nhận diện giọng nói, hệ thống cần chuyển ổi các lệnh thành
tín hiệu iều khiển xe. o Các lệnh iều khiển phải ược thực hiện một
cách nhanh chóng và chính xác, ảm bảo phản hồi tức thì. lOMoAR cPSD| 58647650 • Phát hiện vật cản:
o Hệ thống phải ược trang bị cảm biến ể phát hiện vật cản ở các khoảng
cách khác nhau. o Khi phát hiện vật cản, hệ thống cần cảnh báo người
iều khiển bằng âm thanh hoặc tín hiệu trực quan, và nếu vật cản quá
gần, xe phải tự ộng dừng. •
Phản hồi thời gian thực:
o Hệ thống phải có khả năng xử lý các lệnh và dữ liệu từ cảm biến
trong thời gian thực, ảm bảo xe hoạt ộng trơn tru. • Kết nối IoT:
o Hệ thống cần tích hợp kết nối với mạng IoT ể có thể quản lý và iều
khiển xe từ xa thông qua các thiết bị di ộng.
II.2.2. Yêu cầu quản lý hệ thống:
Yêu cầu quản lý hệ thống liên quan ến việc giám sát, vận hành và duy trì hệ
thống, ảm bảo hệ thống hoạt ộng ổn ịnh và an toàn. •
Giám sát và quản lý từ xa:
o Người quản lý có thể giám sát hoạt ộng của hệ thống thông qua giao
diện iều khiển từ xa (thông qua thiết bị di ộng hoặc máy tính). o Giao
diện quản lý phải hiển thị các thông số quan trọng như tình trạng cảm
biến, lệnh giọng nói ang ược thực hiện, tình trạng phát hiện vật cản và vị trí của xe. • Bảo mật hệ thống:
o Hệ thống cần có các biện pháp bảo mật ể ngăn chặn các truy cập trái
phép vào hệ thống iều khiển. o Cần ảm bảo bảo vệ dữ liệu truyền tải
trong mạng IoT bằng cách sử dụng mã hóa hoặc các phương pháp bảo mật tiên tiến. •
Quản lý cập nhật phần mềm:
o Hệ thống phải hỗ trợ cập nhật phần mềm từ xa ể người quản lý có thể
nâng cấp hoặc sửa lỗi cho hệ thống mà không cần can thiệp trực tiếp vào phần cứng.
II.2.3. Yêu cầu phân tích dữ liệu:
Yêu cầu phân tích dữ liệu liên quan ến việc thu thập, lưu trữ và phân tích dữ
liệu từ hệ thống ể cải thiện hiệu suất và tính năng. •
Thu thập và lưu trữ dữ liệu: lOMoAR cPSD| 58647650
o Hệ thống phải thu thập dữ liệu về các lệnh iều khiển, tình trạng xe,
các vật cản ã phát hiện, và tình trạng của cảm biến. o Dữ liệu phải ược
lưu trữ an toàn trên ám mây hoặc máy chủ ể có thể phân tích sau này. •
Phân tích hiệu suất hệ thống:
o Dữ liệu từ các lệnh giọng nói, các lần phát hiện vật cản và các tình
huống di chuyển phải ược phân tích ể ánh giá hiệu suất của hệ thống. o
Kết quả phân tích phải giúp tối ưu hóa các thuật toán iều khiển xe và
tăng cường ộ chính xác của cảm biến. •
Phân tích hành vi người dùng:
o Hệ thống cần phân tích cách mà người dùng tương tác với hệ thống
thông qua giọng nói, giúp cải thiện ộ chính xác của nhận diện giọng
nói và dự oán nhu cầu iều khiển.
II.2.4. Yêu cầu triển khai ứng dụng:
Yêu cầu triển khai ứng dụng liên quan ến việc cài ặt và vận hành hệ thống
trong môi trường thực tế. •
Tính tương thích với phần cứng:
o Hệ thống phải tương thích với các vi iều khiển như Arduino, Raspberry
Pi, và các cảm biến hồng ngoại, siêu âm, hoặc LIDAR. o Hệ thống phải
hoạt ộng tốt với các thiết bị ầu vào và ầu ra khác nhau như microphone
(nhận giọng nói) và ộng cơ iều khiển xe. • Môi trường triển khai:
o Hệ thống cần ược triển khai trong môi trường thực tế như bãi ỗ xe,
khu dân cư, hoặc trong các nhà máy sản xuất, nơi cần giám sát và iều
khiển xe tự ộng. o Hệ thống phải hoạt ộng ổn ịnh trong các iều kiện môi
trường khác nhau, bao gồm ánh sáng yếu, nhiệt ộ cao hoặc thấp, và ộ ẩm thay ổi. • Khả năng mở rộng:
o Hệ thống cần có khả năng mở rộng ể tích hợp thêm các tính năng như
iều khiển bằng cử chỉ, phát hiện người i bộ hoặc kết nối với các thiết bị
IoT khác. o Cần có khả năng nâng cấp phần mềm và phần cứng ể áp ứng
nhu cầu thay ổi của người dùng và môi trường. • Đào tạo người dùng:
o Cần có tài liệu và giao diện thân thiện với người dùng ể người iều
khiển có thể dễ dàng làm quen và sử dụng hệ thống. o Hệ thống cần có
chế ộ hướng dẫn hoặc trợ giúp ể hỗ trợ người dùng mới khi vận hành
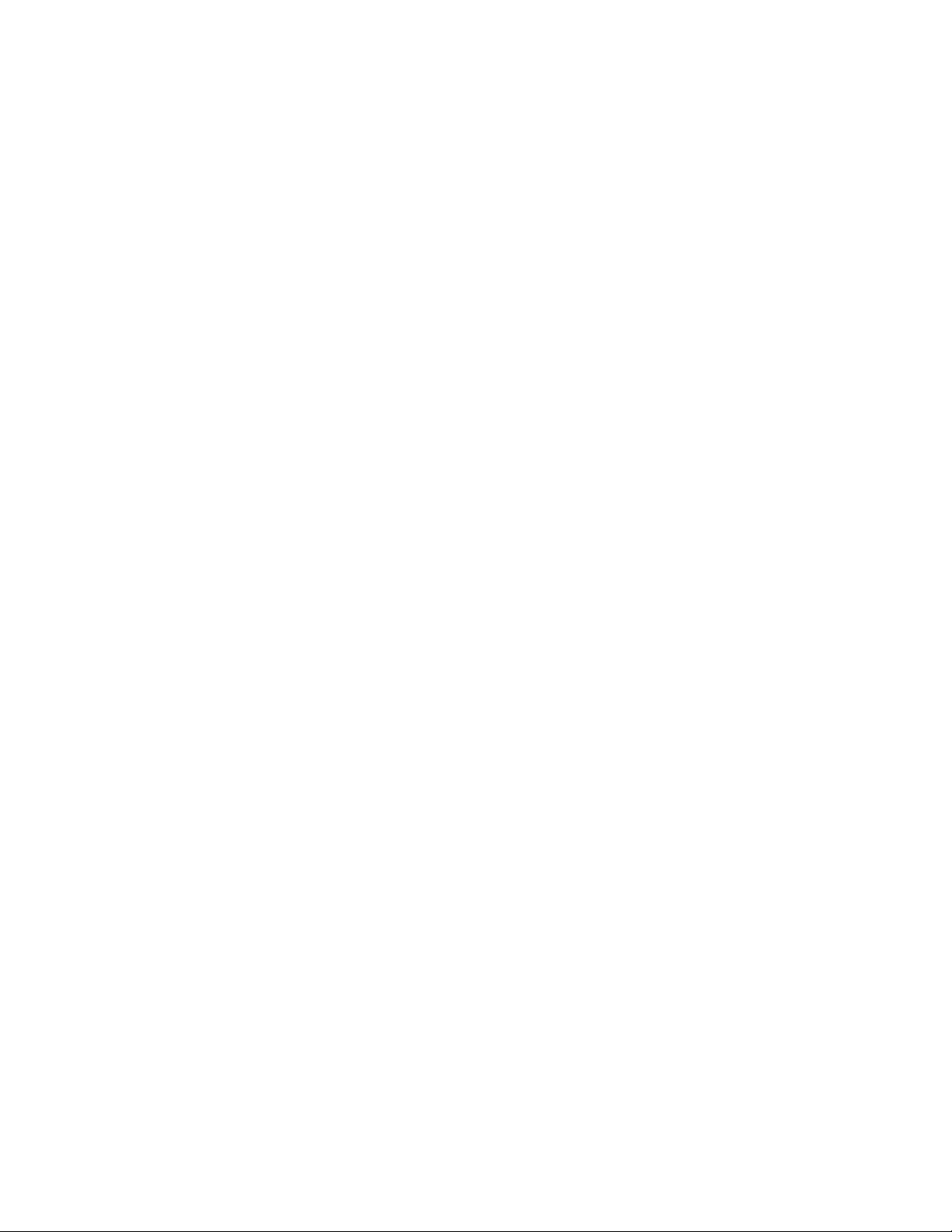
II.3. Đặc tả tiến trình lOMoAR cPSD| 58647650
Hình 4 Đặc tả tiến trình 1. Chọn chế ộ (Mode):
Hệ thống bắt ầu bằng việc chọn giữa hai chế ộ: Tự ộng (Auto) và Thủ công (Manual).
2. Chế ộ tự ộng (Auto): •
Khi chọn chế ộ Tự ộng, hệ thống sẽ kiểm tra khoảng cách ến vật cản (Object Distance). •
Nếu khoảng cách tới vật cản giảm xuống mức thấp (tức là có vật cản gần xe),
hệ thống sẽ chuyển sang trạng thái Dừng xe (State: Stop) ể ảm bảo an toàn, tránh va chạm.
3. Chế ộ thủ công (Manual): •
Khi chọn chế ộ Thủ công, hệ thống sẽ kiểm tra trạng thái chuyển ộng của xe
(Car Moving State), trạng thái này phụ thuộc vào lệnh iều khiển từ người dùng. •
Trong chế ộ này, xe có thể thực hiện các hành ộng khác nhau dựa trên lệnh iều
khiển từ người iều khiển, bao gồm:
o Move (Tiến tới): Xe di chuyển về phía trước. o Back
(Lùi lại): Xe di chuyển về phía sau. o Left (Rẽ trái): Xe rẽ sang trái. o
Right (Rẽ phải): Xe rẽ sang phải. o Stop (Dừng lại): Xe dừng di
chuyển. o Rotate (Quay vòng): Xe thực hiện quay vòng tại chỗ. lOMoAR cPSD| 58647650
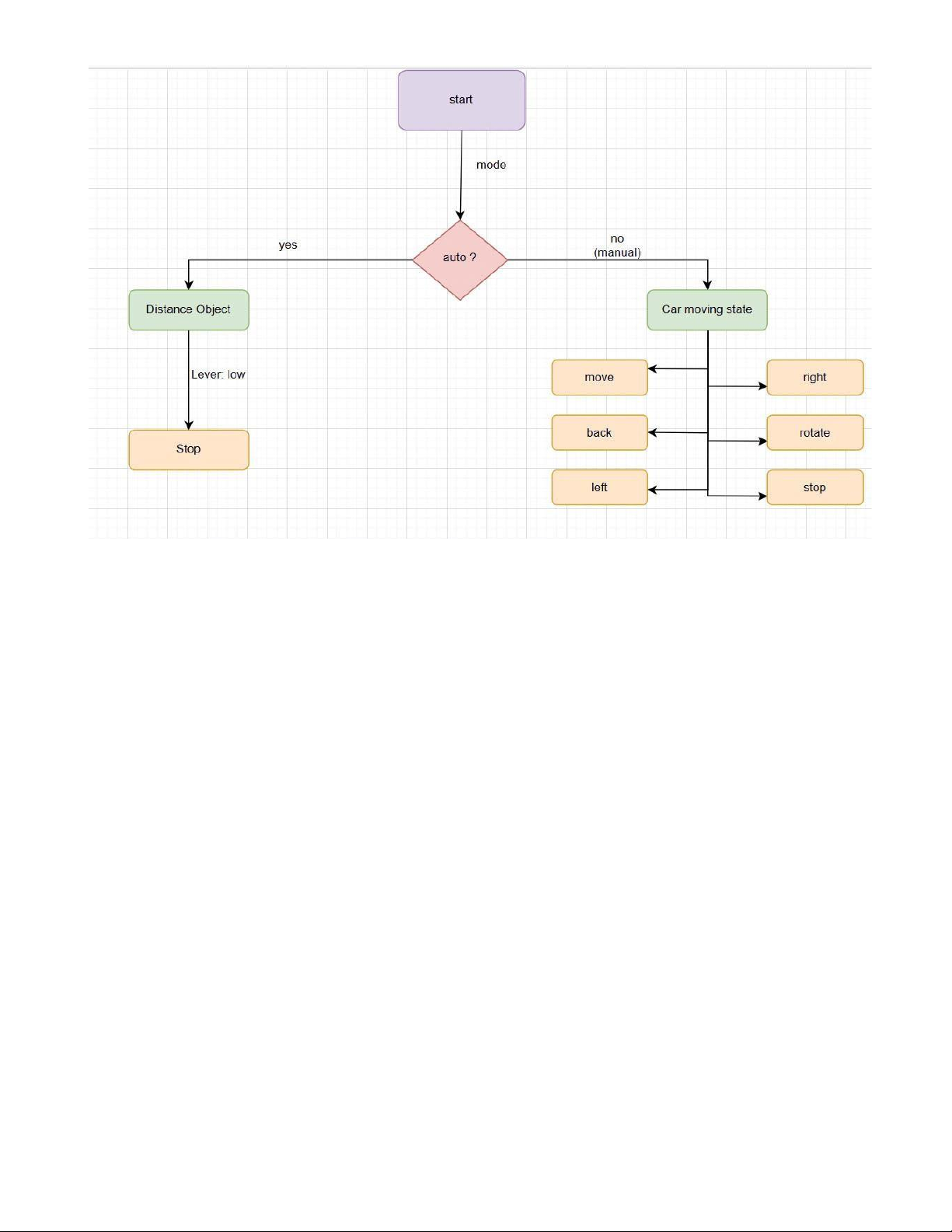
II.4. Mô tả mô hình thông tin
Hình 5 Mô tả mô hình thông tin Luồng thông tin: •
Ứng dụng trên iện thoại gửi lệnh iều khiển (chẳng hạn "Tiến lên") ến Chip ESP32. •
Chip ESP32 truyền lệnh ến Chip L298n ể iều khiển ộng cơ của xe. •
Oto thực hiện di chuyển tương ứng dựa trên lệnh iều khiển từ Chip L298n.
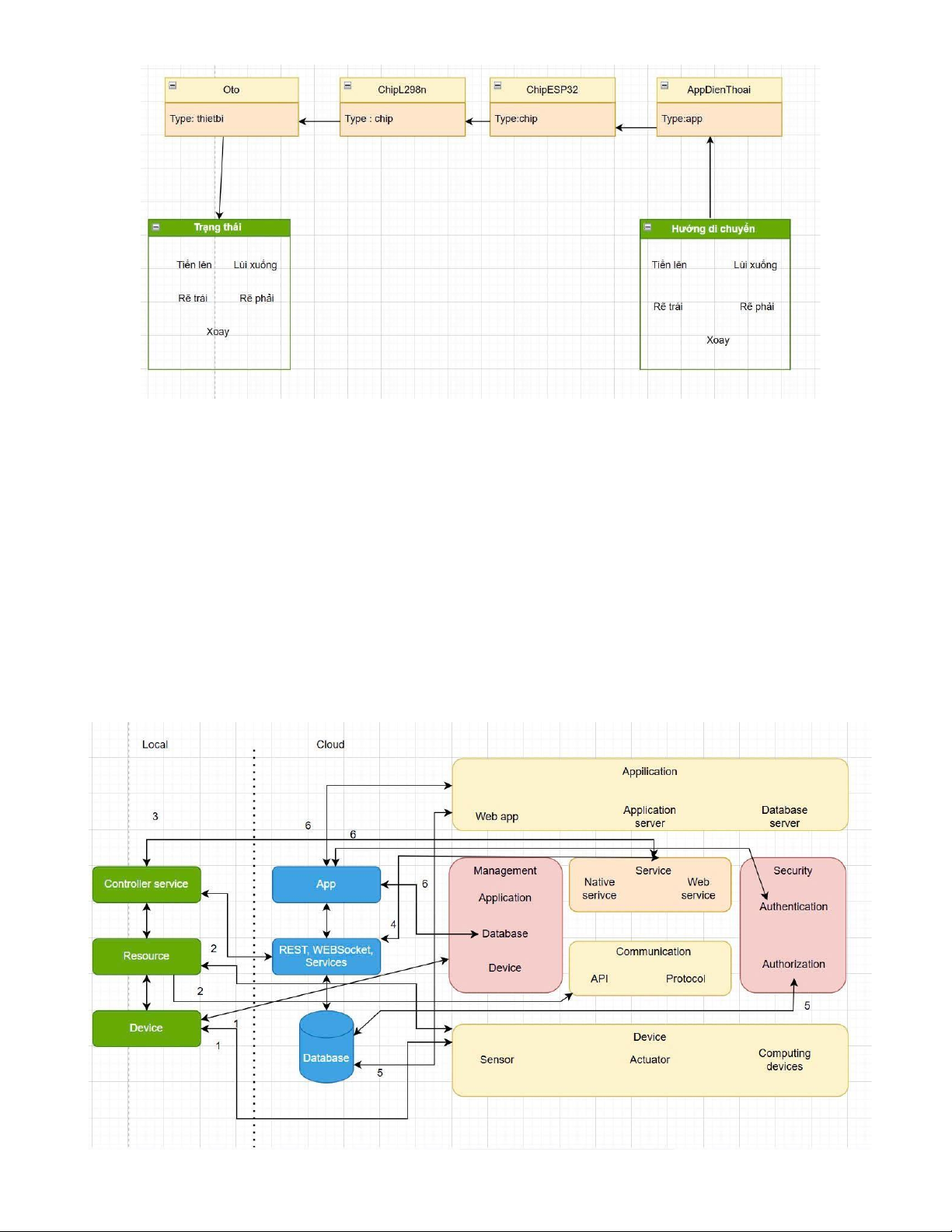
II.5. Đặc tả chức năng lOMoAR cPSD| 58647650
Hình 6 Đặc tả chức năng
Luồng giao tiếp giữa các thành phần: • Local (Cục bộ):
Thiết bị (Device) gửi dữ liệu thu thập ược từ cảm biến và các hành ộng của
bộ truyền ộng ến Resource và Database.
Resource giao tiếp với Device và Controller Service ể quản lý tài nguyên và
ưa ra các hành ộng phù hợp.
Controller Service iều khiển hoạt ộng của Device thông qua Resource dựa
trên thông tin từ ứng dụng quản lý. • Cloud (Đám mây):
REST, WebSocket, Services làm cầu nối liên lạc giữa App, Database, và
Device, cho phép giao tiếp hai chiều giữa các thành phần cục bộ và các
dịch vụ trên ám mây.
Dữ liệu từ Database ược truy xuất và sử dụng bởi các dịch vụ ám mây và
các ứng dụng quản lý ể ưa ra các quyết ịnh hành ộng cho hệ thống.
App và Management Application trên ám mây có thể quản lý và iều khiển
các thiết bị, truy xuất dữ liệu từ cơ sở dữ liệu và gửi lệnh iều khiển tới thiết bị.
II.6. Chi tiết thành phần hệ thống
II.6.1. Thiết bị sử dụng 1. Mô hình xe ô tô •
Xe ô tô giả lập (xe mô hình) tự chế gồm 4 ộng cơ hộp giảm tốc, iện áp cung cấp cho ộng cơ 6-9V lOMoAR cPSD| 58647650
Hình 7 Khung mô hình xe ô tô
2. Mạch ESP32-WROOM-32D ( loại 30 chân )
Hình 8 Mạch ESP32-WROOM-32D
Thông số kỹ thuật của MCU ESP32 :
• Network protocols: IPv4, IPv6, SSL, TCP/UDP/HTTP/FTP/MQTT
• WiFi: Wi-Fi mode: Station/SoftAP/SoftAP+Station/P2P, Wi-Fi Security: WPA/WPA2/WPA2-Enterprise/WPS
• Phạm vi tần số: 2.4 ~ 2.5 GHz
• Bluetooth: Giao thức: Bluetooth v4.2 BR/EDR and BLE specification lOMoAR cPSD| 58647650
• Điện áp hoạt ộng: 2.7 ~ 3.6V ( ối với chân 3V3), tối a 9V ( ối với chân Vin)
• Dòng iện hoạt ộng: trung bình: 80 mA
• Dòng iện tối thiểu từ nguồn iện: 500 mA
• Nhiệt ộ hoạt ộng: –40°C ~ +85°C Mục ích sử dụng :
• Nhận tín hiệu âm thanh: ESP32 sẽ ược kết nối với một micro ể thu thập
các lệnh từ người iều khiển
• Xử lý tín hiệu âm thanh: Dữ liệu âm thanh thu ược sẽ ược chuyển ổi thành
tín hiệu số và xử lý ể nhận diện các từ khóa lệnh.
• Kết nối với các mô- un khác: ESP32 sẽ kết nối với các mô- un khác như
mô- un Bluetooth hoặc Wi-Fi ể truyền dữ liệu ến iện thoại hoặc máy chủ.
• Điều khiển các thiết bị: Dựa trên các lệnh nhận ược, ESP32 sẽ gửi tín hiệu
iều khiển ến các thiết bị thực thi như ộng cơ, èn,...
• Xử lý dữ liệu: ESP32 có thể ược lập trình ể thực hiện các phép tính ơn giản
hoặc phức tạp, ví dụ như tính toán quãng ường, tốc ộ, hoặc lưu trữ dữ liệu. Lý do sử dụng :
• Kết nối không dây: ESP32 hỗ trợ cả Wi-Fi và Bluetooth, cho phép kết nối
với nhiều thiết bị khác nhau.
• Xử lý tín hiệu số: ESP32 có bộ xử lý tín hiệu số tích hợp, rất hữu ích cho việc xử lý âm thanh.
• Nhiều giao diện: ESP32 cung cấp nhiều giao diện khác nhau như UART,
I2C, SPI, giúp kết nối với các cảm biến và thiết bị ngoại vi khác.
• Tiêu thụ iện năng thấp: ESP32 có nhiều chế ộ hoạt ộng tiết kiệm năng
lượng, rất phù hợp cho các thiết bị di ộng.
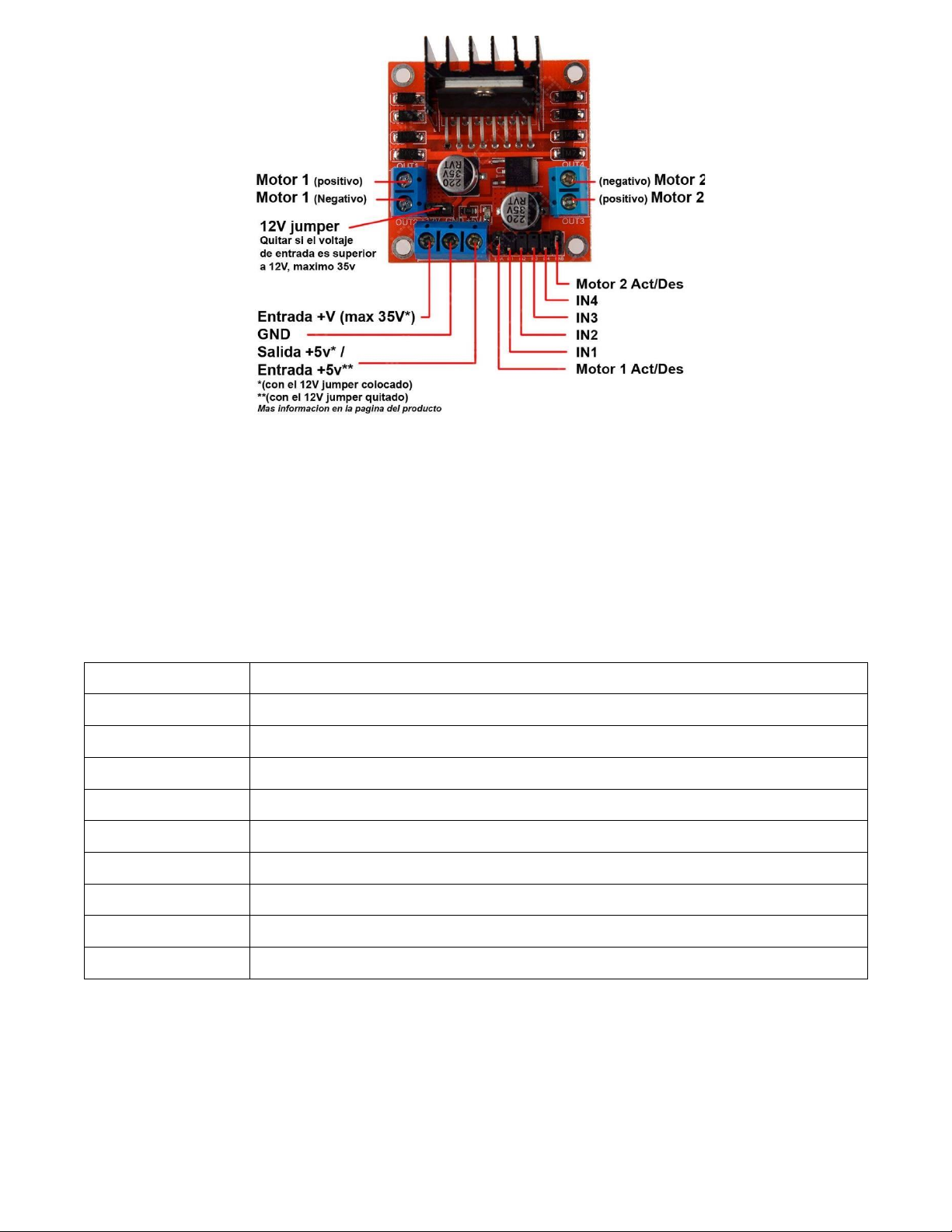
3. Module iều khiển ộng cơ 12V L298N lOMoAR cPSD| 58647650
Hình 9 Module iều khiển ộng cơ 12V L298N Thông số kỹ thuật :
L298N là module iều khiển ộng cơ trong các xe DC và ộng cơ bước.
Module có một IC iều khiển ộng cơ L298 và một bộ iều chỉnh iện áp 5V
78M05. Module L298N có thể iều khiển tối a 4 ộng cơ DC hoặc 2 ộng cơ DC
với khả năng iều khiển hướng và tốc ộ. Sơ ồ chân như sau : Tên chân Mô tả IN1 & IN2
Các chân ầu vào iều khiển hướng quay ộng cơ A IN3 & IN4
Các chân ầu vào iều khiển hướng quay của Động cơ B ENA
Kích hoạt tín hiệu PWM cho Động cơ A ENB
Kích hoạt tín hiệu PWM cho Động cơ B OUT1 & OUT2 Chân ầu ra cho ộng cơ A OUT3 & OUT4
Chân ầu ra cho Động cơ B 12V Đầu vào cấp nguồn 12V 5V
Cấp nguồn cho mạch logic bên trong IC L298N GND Chân nối ất Mục ích sử dụng : •
Tăng cường dòng iện: Động cơ xe ô tô thường cần dòng iện lớn ể hoạt
ộng. L298N giúp tăng cường dòng iện từ ESP32 lên mức phù hợp ể iều
khiển ộng cơ, ảm bảo xe hoạt ộng ổn ịnh và mạnh mẽ. lOMoAR cPSD| 58647650 •
Điều khiển hai ộng cơ: Với hai cầu H, L298N có thể iều khiển ộc lập hai
ộng cơ một chiều. Điều này rất hữu ích cho việc iều khiển các bánh xe
của xe ô tô, giúp xe có thể tiến, lùi, rẽ trái hoặc rẽ phải. •
Điều chỉnh tốc ộ và hướng: Bằng cách thay ổi tín hiệu iều khiển (PWM)
ến các chân của L298N, bạn có thể iều chỉnh tốc ộ và hướng quay của ộng
cơ. Ví dụ, ể xe i nhanh, bạn tăng tín hiệu PWM, và ể xe rẽ trái, bạn iều
chỉnh tốc ộ quay của hai bánh xe khác nhau.
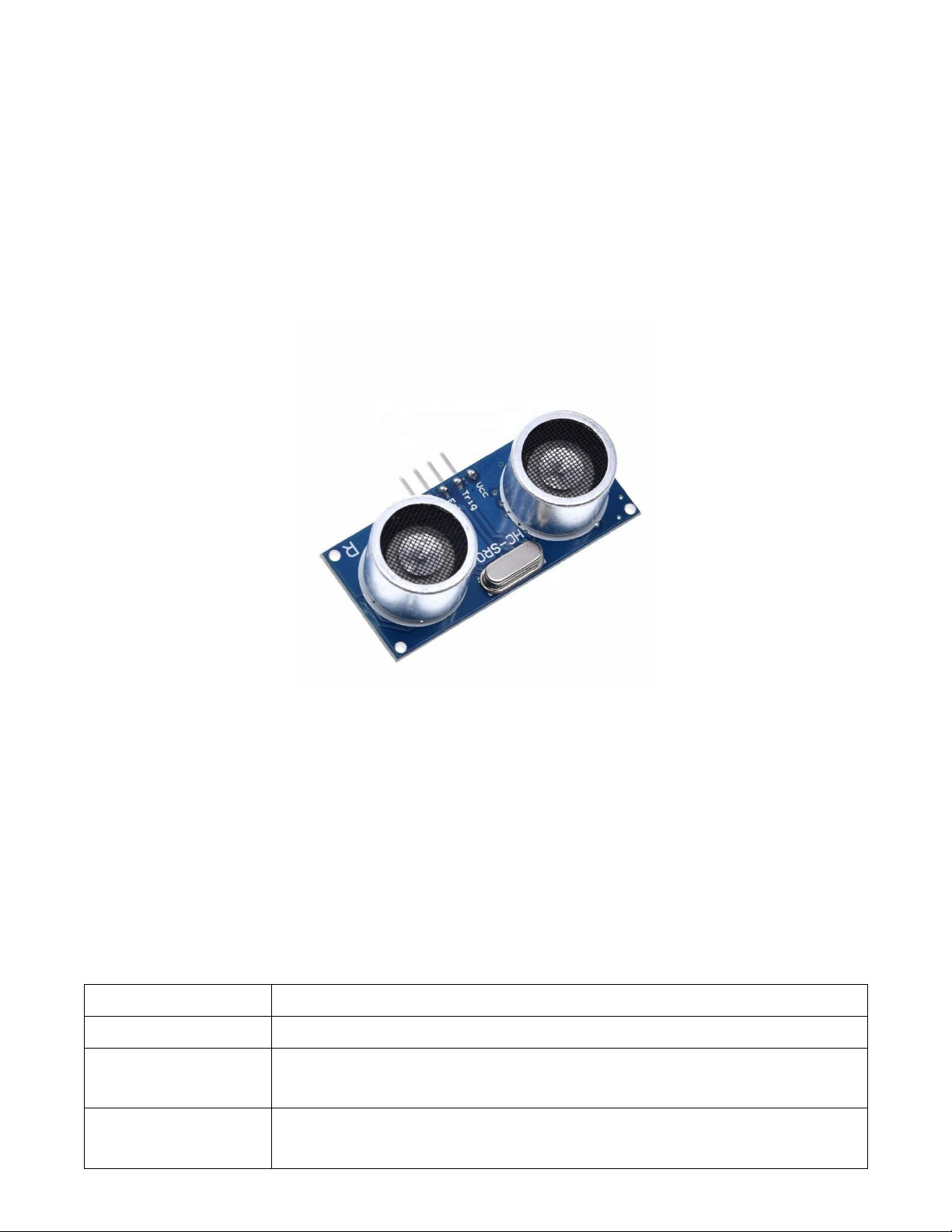
4. Cảm Biến Siêu Âm HC-SR04:
Hình 10 Cảm Biến Siêu Âm HC-SR04 Thông số kỹ :
• Điện áp hoạt ộng: + 5V
• Khoảng cách o lý thuyết: 2cm ến 450cm
• Khoảng cách o thực tế: 2cm ến 80cm • Độ chính xác: 3mm
• Góc o ược bao phủ: <15 °
• Dòng iện hoạt ộng: <15mA
• Tần số hoạt ộng: 40Hz Sơ ồ chân : Tên chân Mô tả Vcc
Chân Vcc cấp nguồn cho cảm biến, thường là + 5V Trigger
Chân trigger là chân ầu vào. Chân này phải ược giữ ở mức cao trong
10us ể khởi tạo phép o bằng cách gửi sóng siêu âm. Echo
Chân Echo là chân ầu ra. Chân này tăng cao trong một khoảng thời
gian bằng với thời gian ể sóng siêu âm quay trở lại cảm biến.
Tài liệu liên quan:
-

Tóm tắt lý thuyết môn IoT và ứng dụng | Học viện Công Nghệ Bưu Chính Viễn Thông
22 11 -

Accelerated Corner-Detector Algorithms: GPU Implementations and Results | Iot và ứng dụng | Học viện Công nghệ Bưu chính Viễn thông
46 23 -

Đề xuất Dự án IoT: Thiết bị phát hiện chạm cho xe máy | Iot và ứng dụng | Học viện Công nghệ Bưu chính Viễn thông
35 18 -

Phân Tích và Giải Pháp FastAPI | Iot và ứng dụng | Học viện Công nghệ Bưu chính Viễn thông
30 15 -

Tăng cường pháp chế xã hội chủ nghĩa trong quản lý nhà nước | Iot và ứng dụng | Học viện Công nghệ Bưu chính Viễn thông
25 13