Các kiến trúc song song - Phân loại và Ứng dụng trong CNTT. Các kiến trúc song song - Phân loại và Ứng dụng trong CNTT
Các kiến trúc song song
7.1. Phân loại kiến trúc máy tính
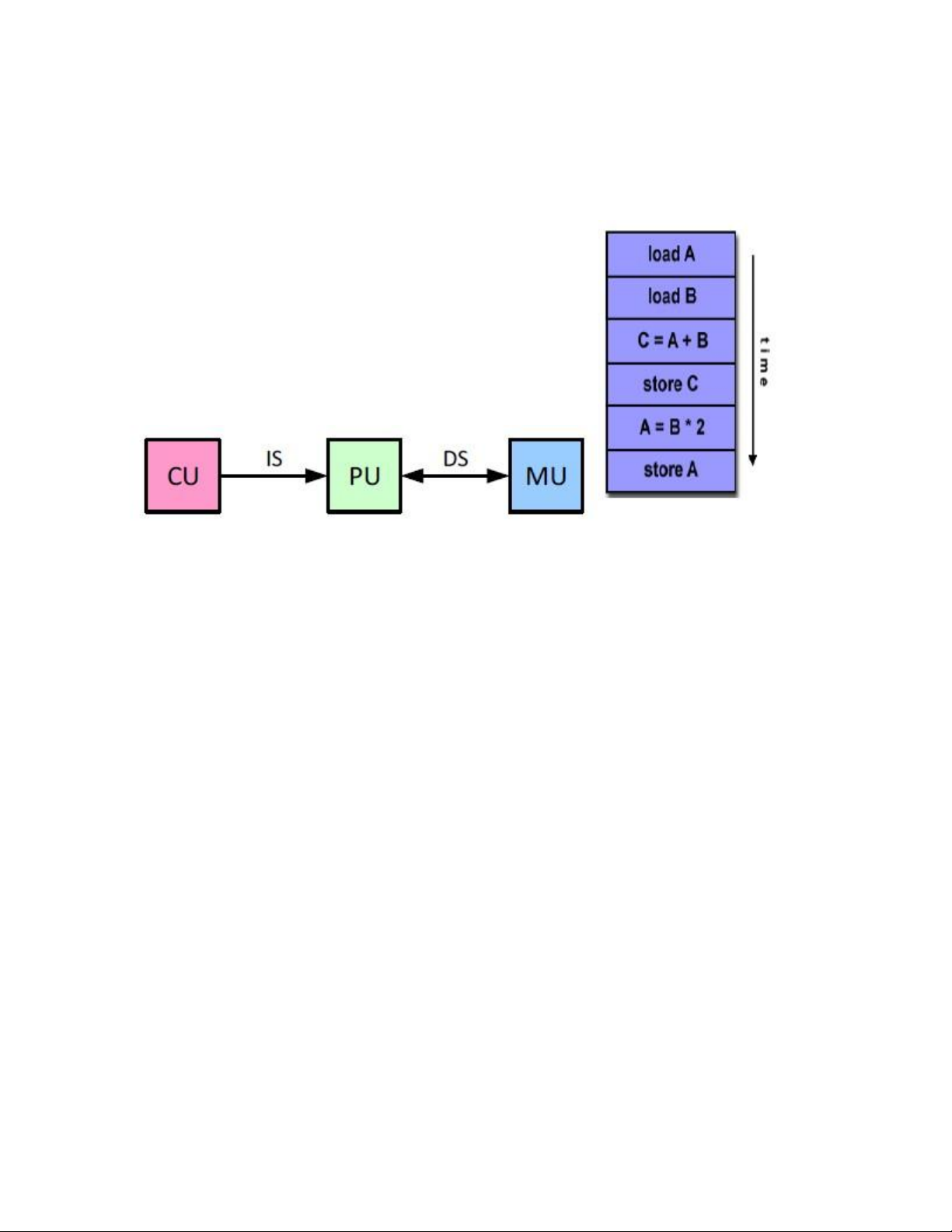
7.1.1. SISD -Single Instruction Stream, Single Data Stream
- CU: Control Unit
- PU: Processing Unit
- MU: Memory Unit
- Một bộ xử lý
- Đơn dòng lệnh
- Dữ liệu được lưu trữ trong một bộ nhớ
- Chính là Kiến trúc von Neumann (tuần tự)
- IS và DS: đơn dòng lệnh, đơn chuỗi dữ liệu
Các kiến trúc song song - Phân loại và Ứng dụng trong CNTT. Các kiến trúc song song - Phân loại và Ứng dụng trong CNTT
Tài liệu gồm 11 trang giúp bạn tham khảo, củng cố kiến thức và ôn tập đạt kết quả cao trong kỳ thi sắp tới. Mời bạn đọc đón xem!
Môn: Kiến trúc máy tính (Phenikaa) 11 tài liệu
Trường: Đại học Phenika 1.3 K tài liệu
Tác giả:


Preview text:
lOMoAR cPSD| 59416725
Các kiến trúc song song
7.1. Phân loại kiến trúc máy tính
7.1.1. SISD -Single Instruction Stream, Single Data Stream - CU: Control Unit - PU: Processing Unit - MU: Memory Unit - Một bộ xử lý - Đơn dòng lệnh
- Dữ liệu được lưu trữ trong một bộ nhớ
- Chính là Kiến trúc von Neumann (tuần tự)
- IS và DS: đơn dòng lệnh, đơn chuỗi dữ liệu
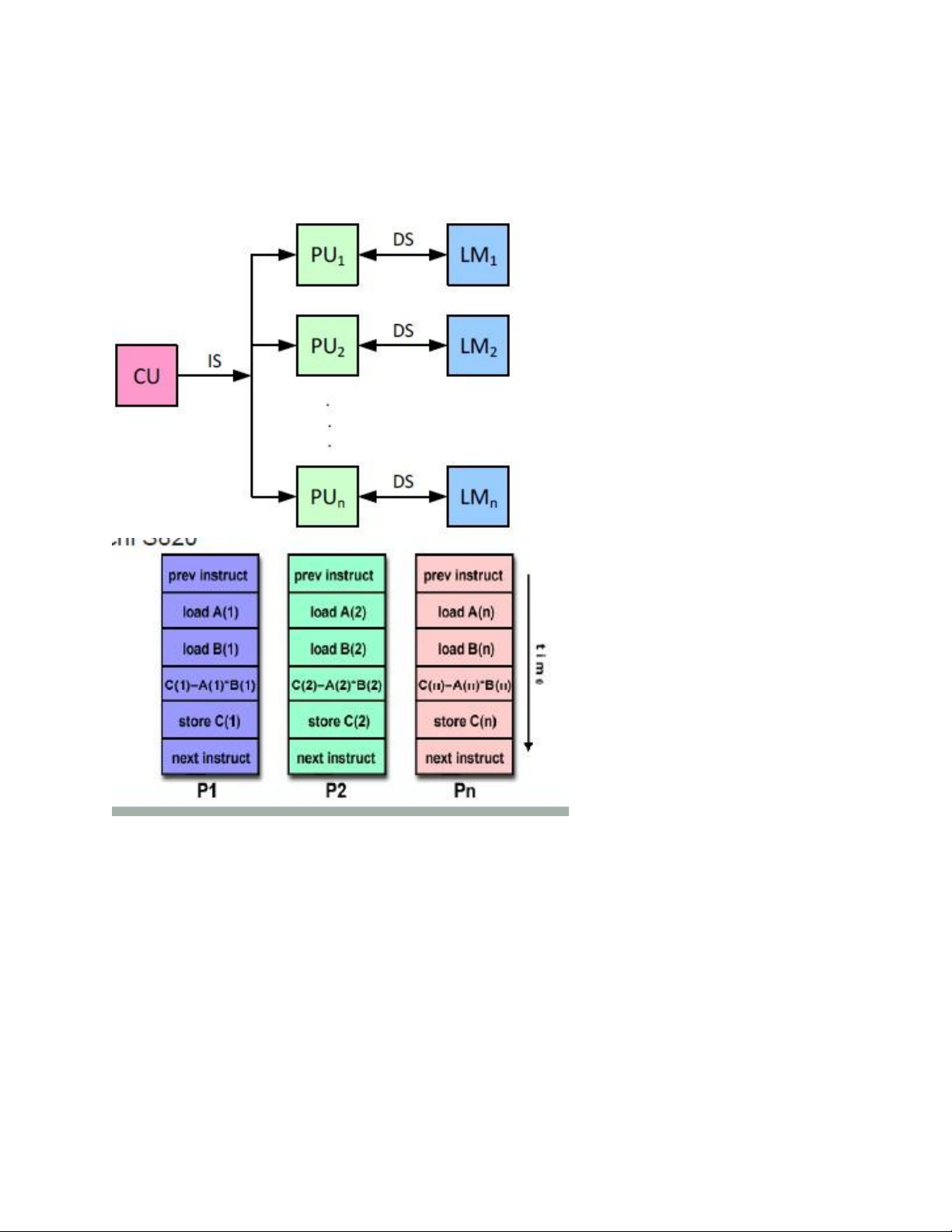
7.1.2. SIMD -Single Instruction Stream, Multiple Data Stream
Đơn dòng lệnh điều khiển đồng thời các đơn vị xử lý PUs
- Mỗi phần tử xử lý có một bộ nhớ dữ liệu riêng LM (local memory)
- Mỗi lệnh được thực hiện trên một tập các dữ liệu khác nhau - Các mô hình SIMD + Vector Computer lOMoAR cPSD| 59416725
+ Array processor: Là một nhóm các bộ xử lý cùng loại được kết nối với nhau
và hoạt động đồng bộ với nhau thường nhờ sự điều khiển của một bộ xử lý trung tâm.
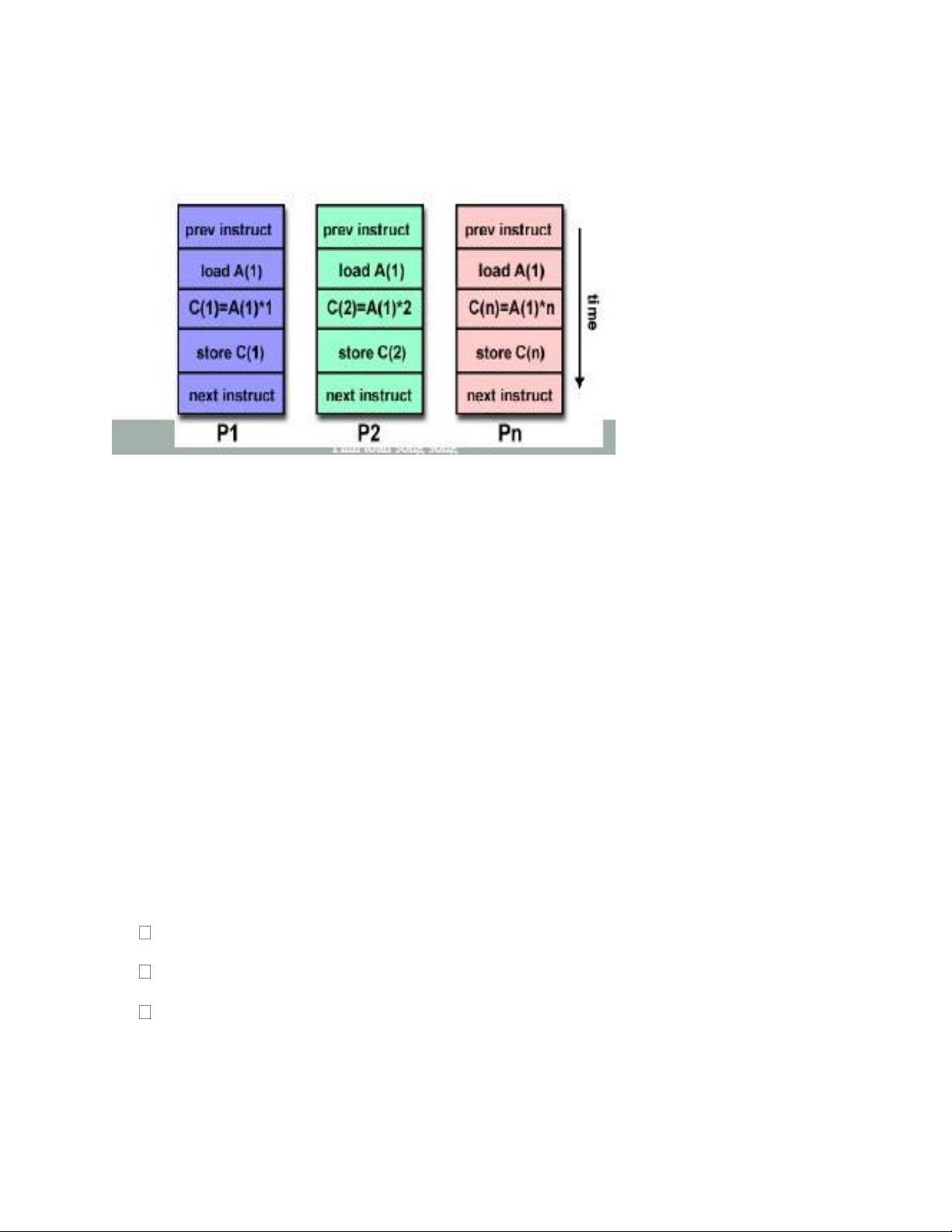
7.1.3. MISD -Multiple Instruction Stream, Single Data Stream
Đơn dòng lệnh điều khiển đồng thời các đơn vị xử lý PUs
- Mỗi phần tử xử lý có một bộ nhớ dữ liệu riêng LM (local memory)
- Mỗi lệnh được thực hiện trên một tập các dữ liệu khác nhau - Các mô hình SIMD + Vector Computer lOMoAR cPSD| 59416725
+ Array processor: Là một nhóm các bộ xử lý cùng loại được kết nối với nhau và
hoạt động đồng bộ với nhau thường nhờ sự điều khiển của một bộ xử lý trung tâm.
Một luồng dữ liệu cùng được truyền đến một tập các bộ xử lý. Sau đó mỗi bộ
xử lý thực hiện một dãy lệnh khác nhau.
7.1.4. MIMD -Multiple Instruction Stream, Multiple Data Stream Tập các bộ xử lý
- Các bộ xử lý đồng thời thực hiện các dãy lệnh khác nhau trên các dữ liệu khác nhau - Các mô hình MIMD
- Multiprocessors (Shared Memory)
- Multicomputers (Distributed Memory)
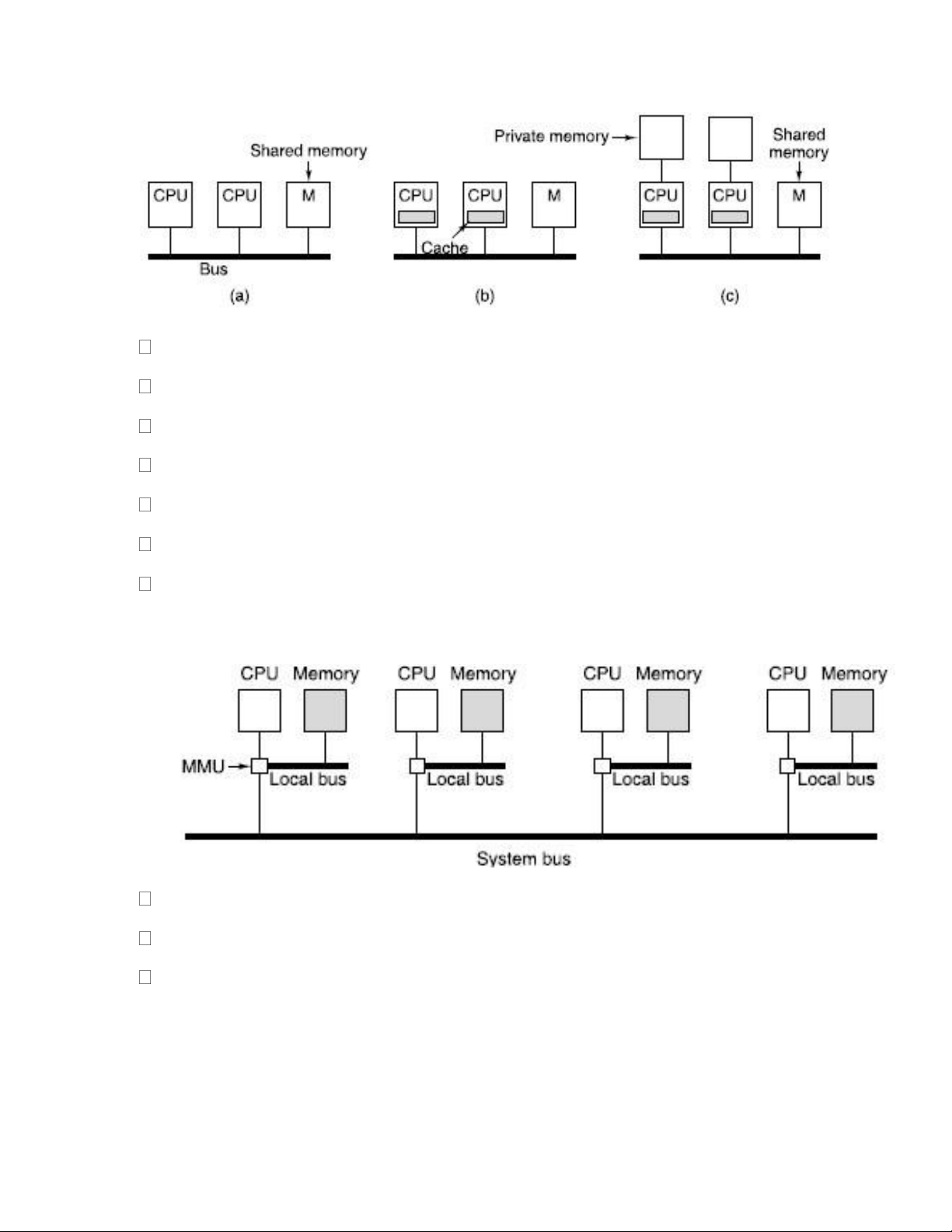
7.2. Multiprocessors (Shared Memory) Đa xử lý bộ nhớ dùng chung
Chúng ta có các dạng sau:
Hệ thống đa xử lý đối xứng (SMP-Symmetric Multiprocessors)
Hệ thống đa xử lý không đối xứng (NUMA –Non-Uniform Memory Access)
Bộ xử lý đa lõi (Multicore Processors)
7.2.1. Hệ thống đa xử lý đối xứng (SMP-Symmetric Multiprocessors) lOMoAR cPSD| 59416725
Một máy tính có n >= 2 bộ xử lý giống nhau
Các bộ xử lý dùng chung bộ nhớ và hệ thống vào-ra
Thời gian truy cập bộ nhớ là bằng nhau với các bộ xử lý
Các bộ xử lý có thể thực hiện chức năng giống nhau
Hệ thống được điều khiển bởi một hệ điều hành phân tán
Hiệu năng: Các công việc có thể thực hiện song song Khả năng chịu lỗi
7.2.2. Hệ thống đa xử lý không đối xứng (NUMA –Non-Uniform Memory Access)
Có một không gian địa chỉ chung cho tất cả CPU
Mỗi CPU có thể truy cập từ xa sang bộ nhớ của CPU khác
Truy nhập bộ nhớ từ xa chậm hơn truy nhập bộ nhớ cục bộ
7.2.3. Đa xử lý bộ nhớ phân tán lOMoAR cPSD| 59416725 Máy tính qui mô lớn:
Hệ thống qui mô lớn, đắt tiền: nhiều triệu USD,
Dùng cho tính toán khoa học và các bài toán có số phép toán và dữ liệu rất
lớn (còn gọi là các siêu máy tính)
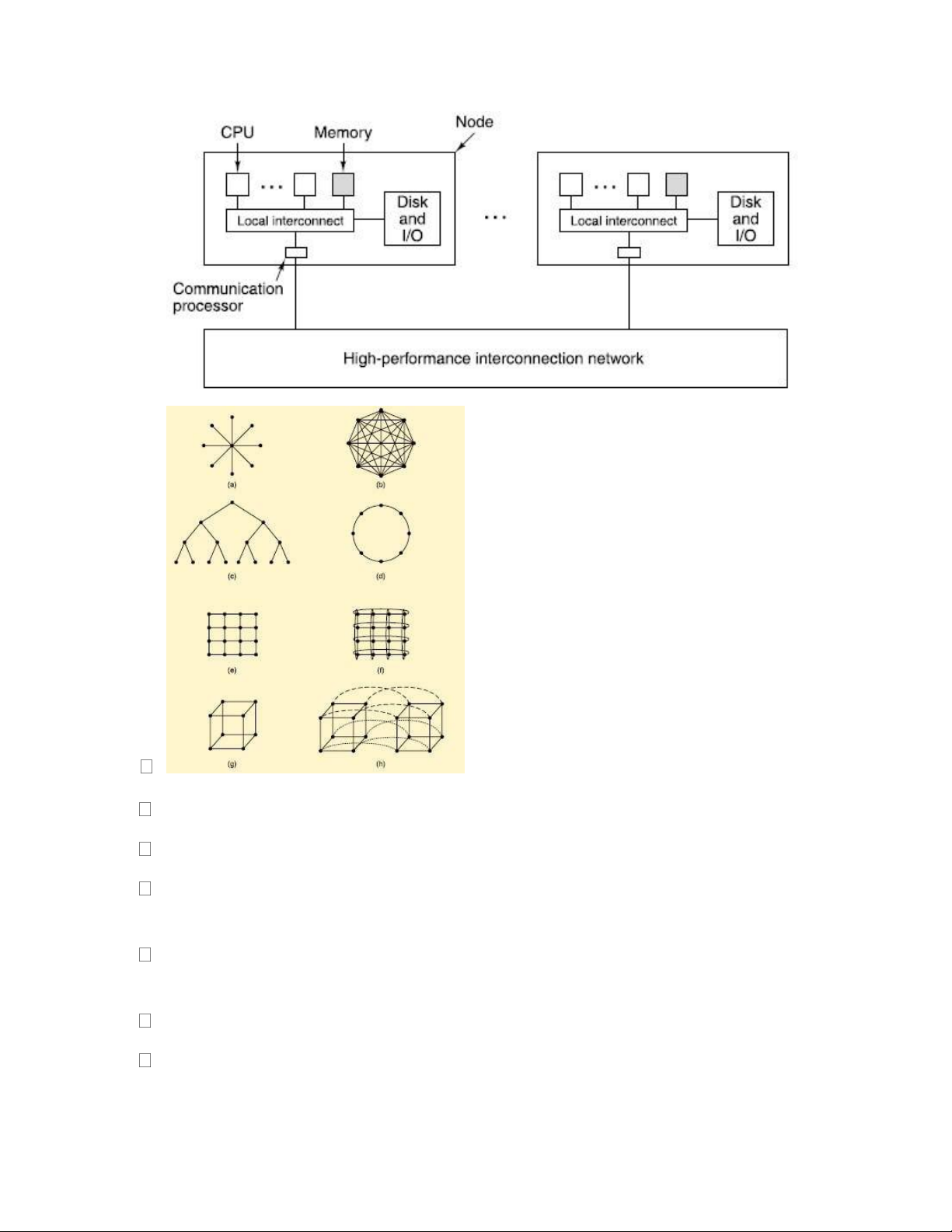
Máy tính qui mô lớn (Warehouse Scale Computers or Massively Parallel Processors –MPP): Máy tính cụm (clusters)
- Nhiều máy tính được kết nối với nhau bằng mạng liên kết tốc độ cao (~ Gbps) lOMoAR cPSD| 59416725
- Mỗi máy tính có thể làm việc độc lập (PC hoặc SMP)
- Mỗi máy tính được gọi là một node
- Các máy tính có thể được quản lý làm việc song song theo nhóm (cluster)
- Toàn bộ hệ thống có thể coi như là một máy tính song song - Tính sẵn sàng cao
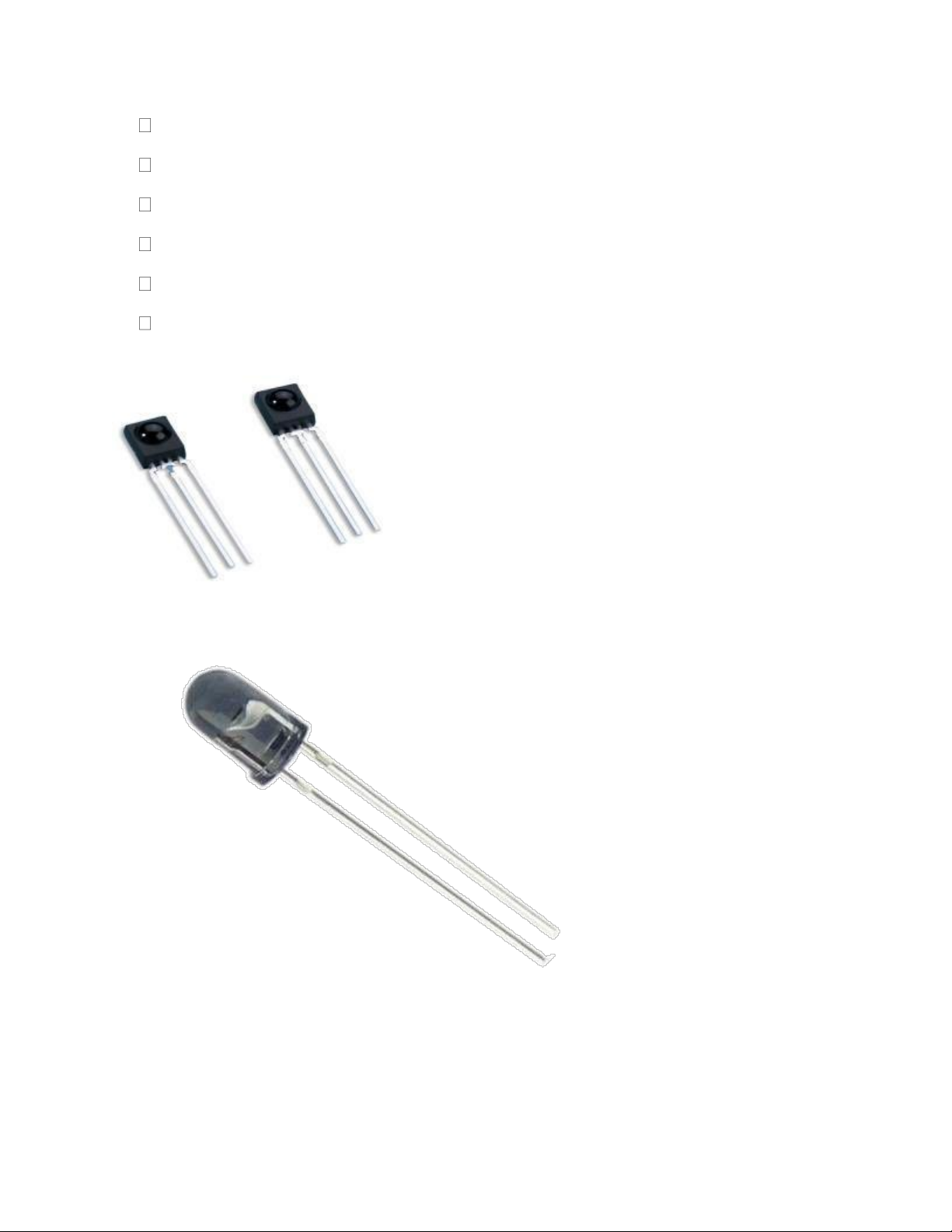
- Khả năng chịu lỗi lớn IR Receiver IR Led lOMoAR cPSD| 59416725
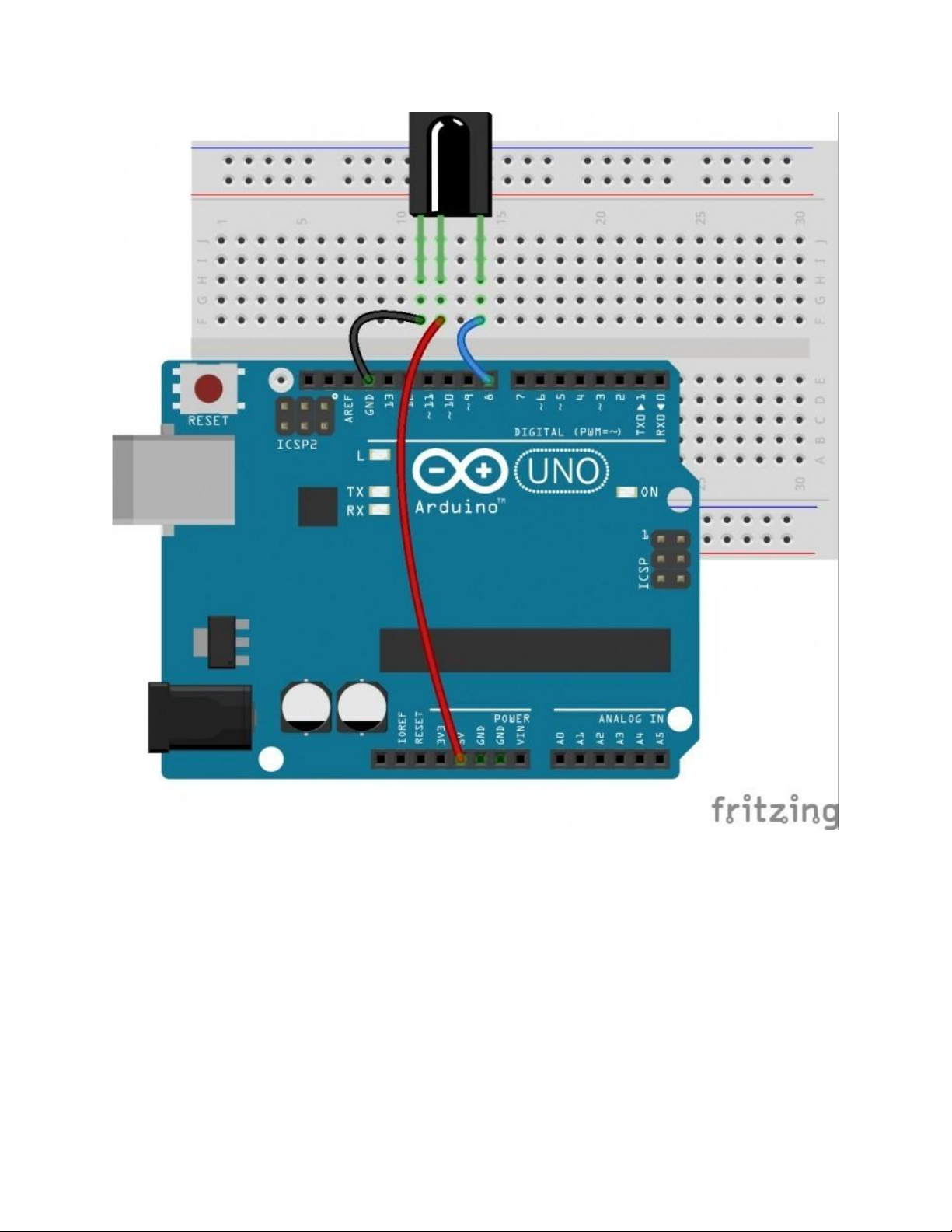
#include // thư viện hỗ trợ IR remote
const int receiverPin = 8; // chân digital 8 dùng để đọc tín hiệu
IRrecv irrecv(receiverPin); // tạo đối tượng IRrecv mới
decode_results results;// lưu giữ kết quả giải mã tín hiệu void setup() {
Serial.begin(9600);// serial baudrate 9600
irrecv.enableIRIn(); // start the IR receiver } void loop() {
if (irrecv.decode(&results)) // nếu nhận được tín hiệu lOMoAR cPSD| 59416725 {
Serial.println(results.value, HEX); // in ra Serial Monitor delay(200);
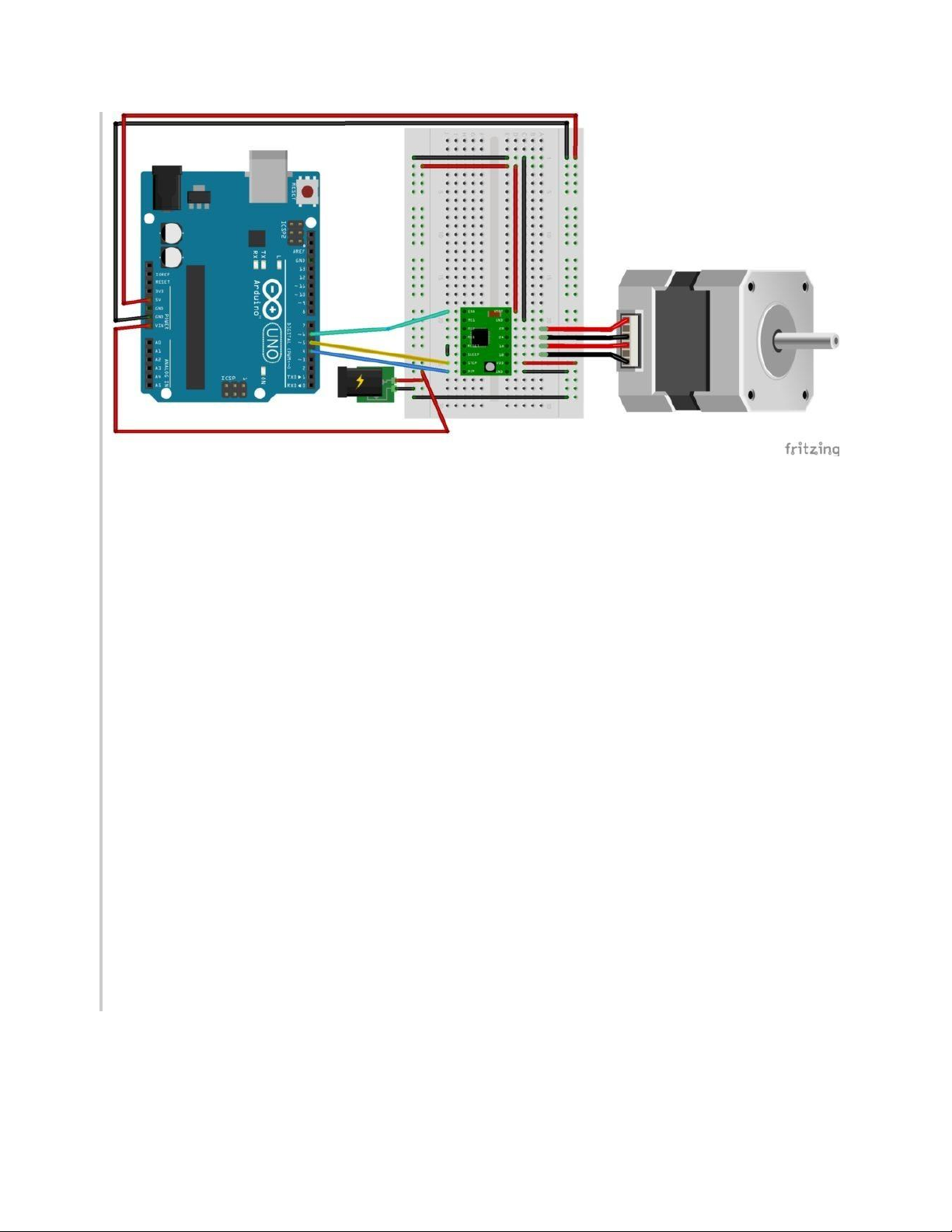
irrecv.resume(); // nhận giá trị tiếp theo } } Step Motor
động cơ bước là một loại động cơ mà ở đó bạn sẽ có thể quy định chính xác số góc
quay và động cơ bước sẽ phải quay. Không giống như Servo, động cơ bước có thể
quay bao nhiêu độ tùy ý và mỗi lần quay nó sẽ quay được 1 step, 1 step ở đây là
bao nhiêu còn phụ thuộc vào động cơ bước của bạn. Ví dụ, động cơ bước của bạn
có 72 step thì nó sẽ cần quay 72 step để hoàn thành một vòng quay. Số step này là
hằng số, nhưng bạn có thể dùng công nghệ micro step để "cải thiện" số vòng quay
động cơ bước của bạn. lOMoAR cPSD| 59416725 int x; #define BAUD (9600) void setup() { Serial.begin(BAUD);
pinMode(6,OUTPUT); // Enable pin - chân khởi động - nối vào GND sẽ giúp
ta bật động cơ bước, nối vô VCC động cơ bước được thả ra. Nôm na: GND =
servo.attach, VCC = servo.detach
pinMode(5,OUTPUT); // Step pin
pinMode(4,OUTPUT); // Dir - pin
digitalWrite(6,LOW); // Set Enable low } void loop() {
digitalWrite(6,LOW); // Đặt Enable ở trạng thái LOW
digitalWrite(4,HIGH); // Đặt Dir ở trạng thái HIGH
Serial.println("Cho chay 200 steps (1 vong)");
for(x = 0; x < 200; x++) // Cho chay 1 vong {
digitalWrite(5,HIGH); // Output high delay(10); // chờ
digitalWrite(5,LOW); // Output low delay(100); // chờ } Serial.println("Pause");
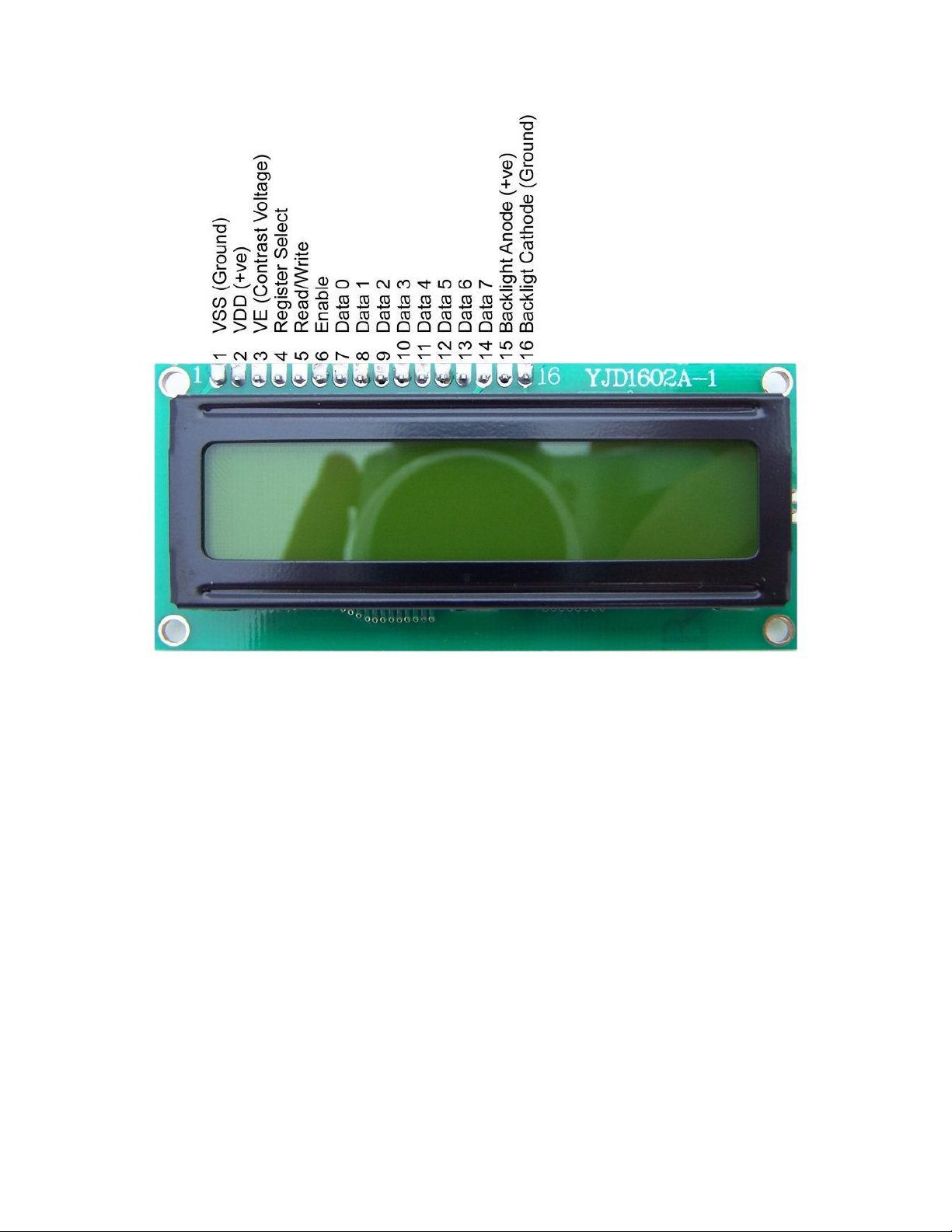
delay(1000); // dừng 1 s rồi quay tiếp } LCD lOMoAR cPSD| 59416725
1. VSS: tương đương với GND - cực âm
2. VDD: tương đương với VCC - cực dương (5V)
3. Constrast Voltage (Vo): điều khiển độ sáng màn hình
4. Register Select (RS): điều khiển địa chỉ nào sẽ được ghi dữ liệu
5. Read/Write (RW): Bạn sẽ đọc (read mode) hay ghi (write mode) dữ liệu? Nó sẽphụ
thuộc vào bạn gửi giá trị gì vào.
6. Enable pin: Cho phép ghi vào LCD
7. D0 - D7: 8 chân dư liệu, mỗi chân sẽ có giá trị HIGH hoặc LOW nếu bạn đang ởchế
độ đọc (read mode) và nó sẽ nhận giá trị HIGH hoặc LOW nếu đang ở chế độ ghi (write mode)
8. Backlight (Backlight Anode (+) và Backlight Cathode (-)): Tắt bật đèn màn hìnhLCD. 9. #include 10. 11.
//Khởi tạo với các chân lOMoAR cPSD| 59416725 12.
LiquidCrystal lcd(12, 11, 5, 4, 3, 2); 13. 14. void setup() { 15.
//Thông báo đây là LCD 1602 16. lcd.begin(16, 2); 17.
//In ra màn hình lcd dòng chữ Toi yeu Arduino 18.
lcd.print("Toi yeu Arduino!"); 19. } 20. 21. void loop() { 22.
// đặt con trỏ vào cột 0, dòng 1 23.
// Lưu ý: dòng 1 là dòng thứ 2, lòng 0 là dòng thứ 1. Nôm na,
nó đếm từ 0 từ không phải từ 1 24. lcd.setCursor(0, 1); 25. // In ra dong chu 26. lcd.print(" Arduino.VN"); 27. }
Tài liệu liên quan:
-

Môn Kiến trúc máy tính | Đại học Trường Đại học Phenika. Môn Kiến trúc máy tính | Đại học Trường Đại học Phenika.
126 63 -

Đề cương chi tiết học phần CNTT: Kiến trúc máy tính (IT). Môn Kiến trúc máy tính | Đại học Trường Đại học Phenika.
91 46 -

CS453 - Bài 4: Giải thích cơ chế Cookies, Caching, FTP và Email. Môn Kiến trúc máy tính | Đại học Trường Đại học Phenika.
100 50 -

Bài 4 - Cơ Chế Cookies, Web Caching và FTP trong Http (CS453). Môn Kiến trúc máy tính | Đại học Trường Đại học Phenika.
76 38