Chế tạo animal robot để di chuyển đồ vật | Môn Công nghệ kỹ thuật điện tử - viễn thông - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
Hiện nay các nhà máy hạt nhân hoạt động rất nhiều và các công nhân đang làm việc trong các môi trường này đang phải đối mặt với rất nhiều chất độc hại. Tài liệu được sưu tầm gồm 14 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: công nghệ kỹ thuật điện tử - viễn thông 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:







Preview text:
lOMoAR cPSD| 58675420
BỘ GIÁO DỤC & ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP. HỒ CHÍ MINH
KHOA ĐIỆN – ĐIỆN TỬ
BỘ MÔN TỰ ĐỘNG ĐIỀU KHIỂN
-----------------⸙∆⸙-----------------
BÁO CÁO TIỂU LUẬN
ĐỀ TÀI: Chế tạo animal robot để di chuyển đồ vật
GVHD: TS. Vũ Văn Phong SVTH: 1 Hồ Viết Nhân 22151265
2 Nguyễn Quang Minh 22151256
3 Nguyễn Quốc Nhật 22151268
4 Cao Đăng Phúc Tấn 2215195
Tp. Hồ Chí Minh tháng 12 năm 2022 lOMoAR cPSD| 58675420
Trang bìa.......................................................................................................................i
Nhiệm vụ đồ án...........................................................................................................ii
Lịch trình ...................................................................................................................iii
Cam đoan ...................................................................................................................iv
Lời cảm ơn...................................................................................................................v
Mục lục.......................................................................................................................vi
Liệt kê hình vẽ............................................................................................................ix
Liệt kê bảng vẽ …………………………………………………………………… xi
Tóm tắt .....................................................................................................................xii
CHƯƠNG 1. TỔNG QUAN.....................................................................................1
1.1. Đặt vấn đề.........................................................................................................2
1.3. Mục tiêu............................................................................................................3
1.4. Giới hạn............................................................................................................3
1.5. Nội dung nghiên cứu.........................................................................................3
1.6. Bố cục...............................................................................................................4
CHƯƠNG 2. CƠ SỞ LÝ THUYẾT.........................................................................5
2.1 Tổng quan vi điều khiển VN8-01......................................................................6
2.2 Đặc điểm thiết kế phần cứng VN8-01...............................................................9
2.2.1 Thiết kế CPU dạng RISC................................................................................9
2.2.2 Cấu trúc Pipeline 5 tầng..................................................................................9
2.3 Tổ chức bộ nhớ trong VN8-01.........................................................................12
2.3.1 Bộ nhớ chương trình.....................................................................................12
2.3.2 Bộ nhớ dữ liệu..............................................................................................13
2.4 Cấu trúc I/O của VN8-01.................................................................................15
2.5 Xử lý ảnh.........................................................................................................17
2.6 Xử lý tín hiệu...................................................................................................15
CHƯƠNG 3. TÍNH TOÁN VÀ THIẾT KẾ...........................................................71
3.1 Mục đích sử dụng mở rộng các chuẩn giao tiếp...............................................72
3.2 Chuẩn truyền thông 1 dây (1-wire)..................................................................73
3.2.1 Tổng quan về cảm biến 1 dây........................................................................73
3.2.2 Giao thức giao tiếp của chuẩn truyền thông 1 dây.........................................73
3.2.3 Cảm biến nhiệt độ DS18B20.........................................................................76
3.3 Chuẩn truyền nối tiếp 2 dây - I2C....................................................................84
3.3.1 Đặc điểm truyền thông I2C...........................................................................84
3.3.2 Quá trình giao tiếp giữa 2 thiết bị trên bus I2C.............................................86
3.4 Ứng dụng minh họa dùng cảm biến 1 dây kết hợp IC truyền thông I2C..........95 lOMoAR cPSD| 58675420
3.5 Thiết kế hệ thống giao tiếp camera và máy tính...............................................96
3.6 Thiết kế chương trình.......................................................................................98
CHƯƠNG 4. THI CÔNG HỆ THỐNG ...............................................................99
4.1 Giới thiệu. .......................................................................................................100
4.2 Thi công hệ thống những kết quả khác............................................................103
CHƯƠNG 5. KẾT QUẢ_NHẬN XÉT_ĐÁNH GIÁ .........................................116
5.1 Kết quả 1. ........................................................................................................117
5.2 Kết quả 2..........................................................................................................117
5.3 Kết quả 3 và những kết quả khác.....................................................................118
CHƯƠNG 6. KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN....................................119
6.1 Kết luận ................................................................................................................ 6.2
Hướng phát triển....................................................................................................
TÀI LIỆU THAM KHẢO PHU LỤC
............................................................................................................
Chương 1. TỔNG QUAN
1.1. ĐẶT VẤN ĐỀ
Hiện nay các nhà máy hạt nhân hoạt động rất nhiều và các công nhân đang làm việc
trong các môi trường này đang phải đối mặt với rất nhiều chất độc hại. Hay việc vận chuyển
đồ trong các kho đông lạnh cũng có môi trường làm việc khắc nghiệt. Để bảo đảm sức khỏe
cho con người chúng ta có thể áp dụng robot để làm phục vụ con người trong các môi
trường khắc nghiệt như vậy.
Chính vì vậy chúng ta cần tạo ra robot có thể di chuyển được các đồ vật và có thể
điều khiển từ khoảng cách xa. lOMoAR cPSD| 58675420 1.2. MỤC TIÊU
Tạo ra robot mang hình dạng của 1 con voi có thể gắp và di chuyển được các đồ vật
đến sắp xếp đúng vị trí mà chúng ta yêu cầu. Sử dụng điều khiển không dây (Bluetooth)
qua điện thoại di động để điều khiển robot hoạt đông.
1.3. NỘi DUNG NGHIÊN CỨU
Liệt kê các nội dung chính sẽ được thực hiện trong đề tài ví dụ: Chương 1: Tổng quan
Chương 2: Cơ sở lý thuyết
Chương 3: Tính toán thiết kế
Chương 4: Thi công sản phẩm
Chương 5: Kết quả_Nhận xét _Đánh giá
Chương 6: Kết luận và hướng phát triển 1.4. GIỚI HẠN
Yêu cầu về kích thước: 25x20x20cm (dài – rộng – cao)
Khối lượng có thể gắp: dưới 500g.
Phạm vi hoạt động: trong vòng bán kính 10m.
Tốc độ tối đa: 1,5 m/s; Chương 2.
TÍNH TOÁN VÀ THIẾT KẾ
2.1. YÊU CẦU ĐIỀU KHIỂN
Điều khiển xe thông qua module bluetooth HC-05 sử dụng app “Bluetooth RC Car” for android lOMoAR cPSD| 58675420
Hình 2.1 Giao diện app “Bluetooth RC Car” 2.2.
TÍNH TOÁN VÀ THIẾT KẾ HỆ THỐNG
2.2.1 Thiết kế phần cứng:
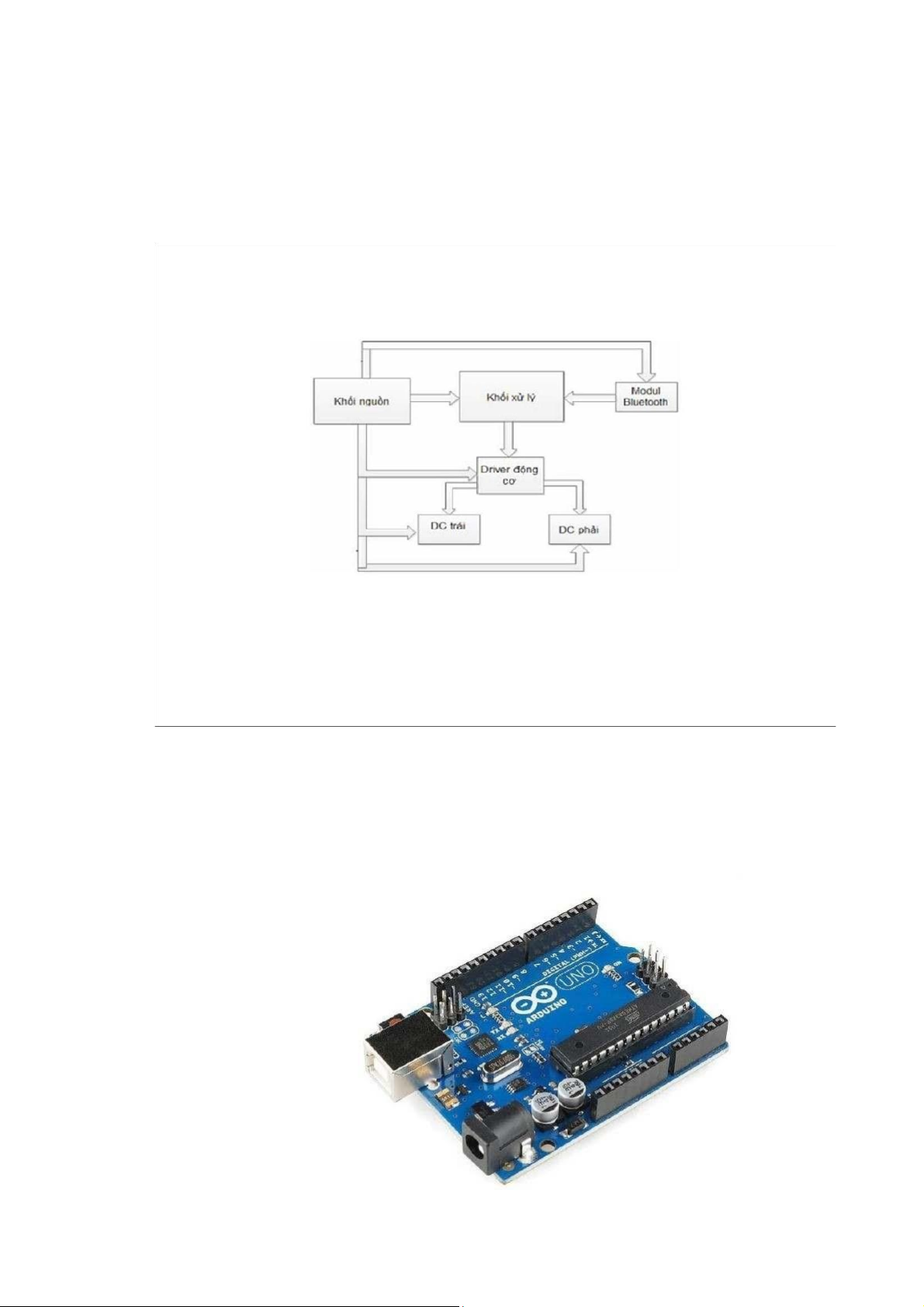
Nhìn vào hình 2.2 để ta có một cái nhìn tổng quát nhất về mô hình xe điều khiển từ xa
sẽ bao gồm các khối chính: khối nguồn, khối xử lí, module Bluetooth, driver động cơ, động
cơ DC trái và động cơ DC phải.
Hình 2.2 : Sơ đồ khối tổng quát
2.2.2 Khối xử lí động cơ
Khối xử lý sử dụng bo mạch ArduinoUNO. Có nhiệm vụ nhận tín hiệu từ model
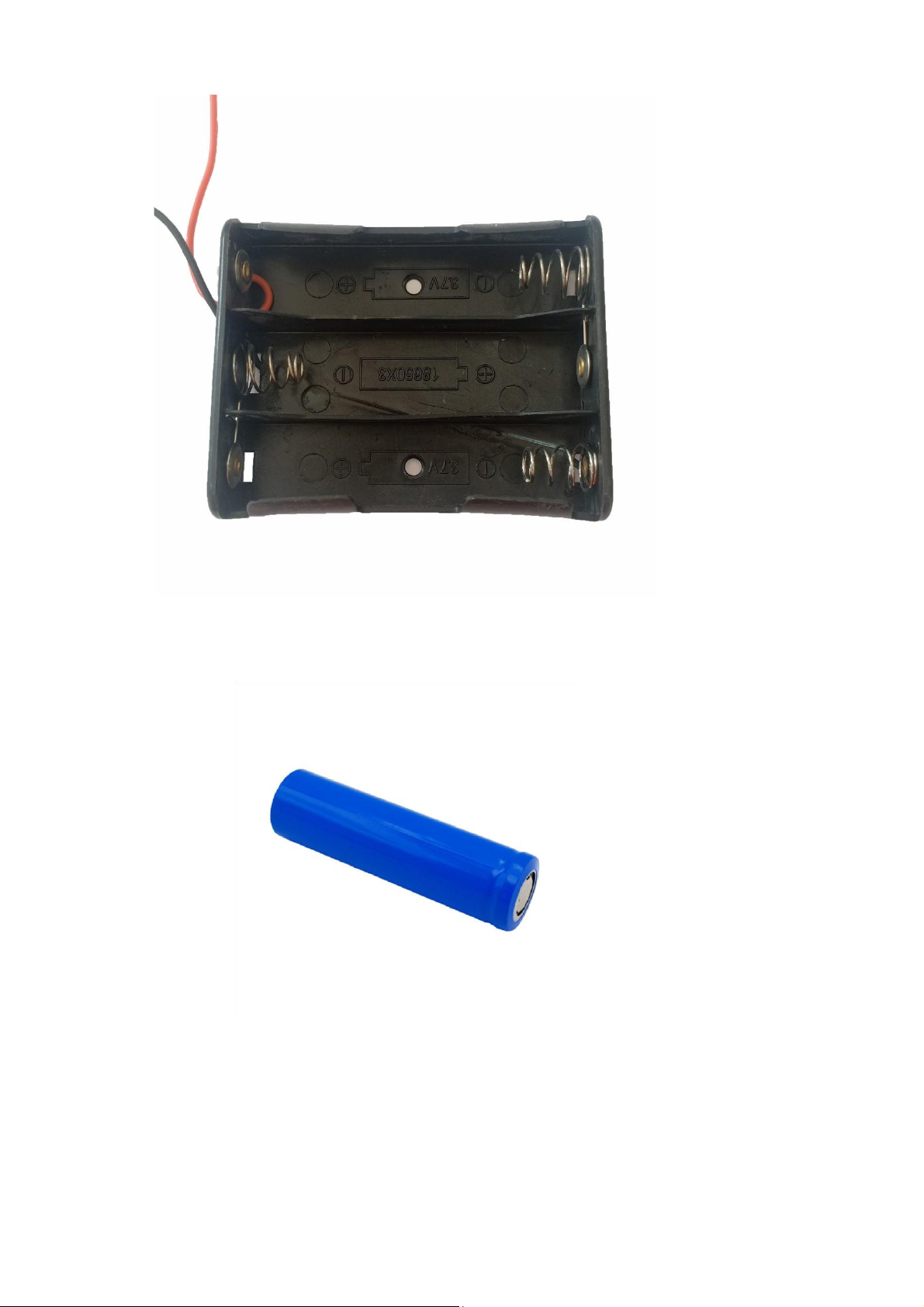
Bluetooth, xử lý và xuất dữ liệu cho modul Driver động cơ. lOMoAR cPSD| 58675420 Hình 2.3 Arduino UNO R3 lOMoAR cPSD| 58675420 2.2.3 Khối nguồn:
Khối nguồn sử dụng đế giữ 3 cell pin và 3 viên pin 18650 Hình 2.4 đế cell pin Hình 2.5 Pin 18650
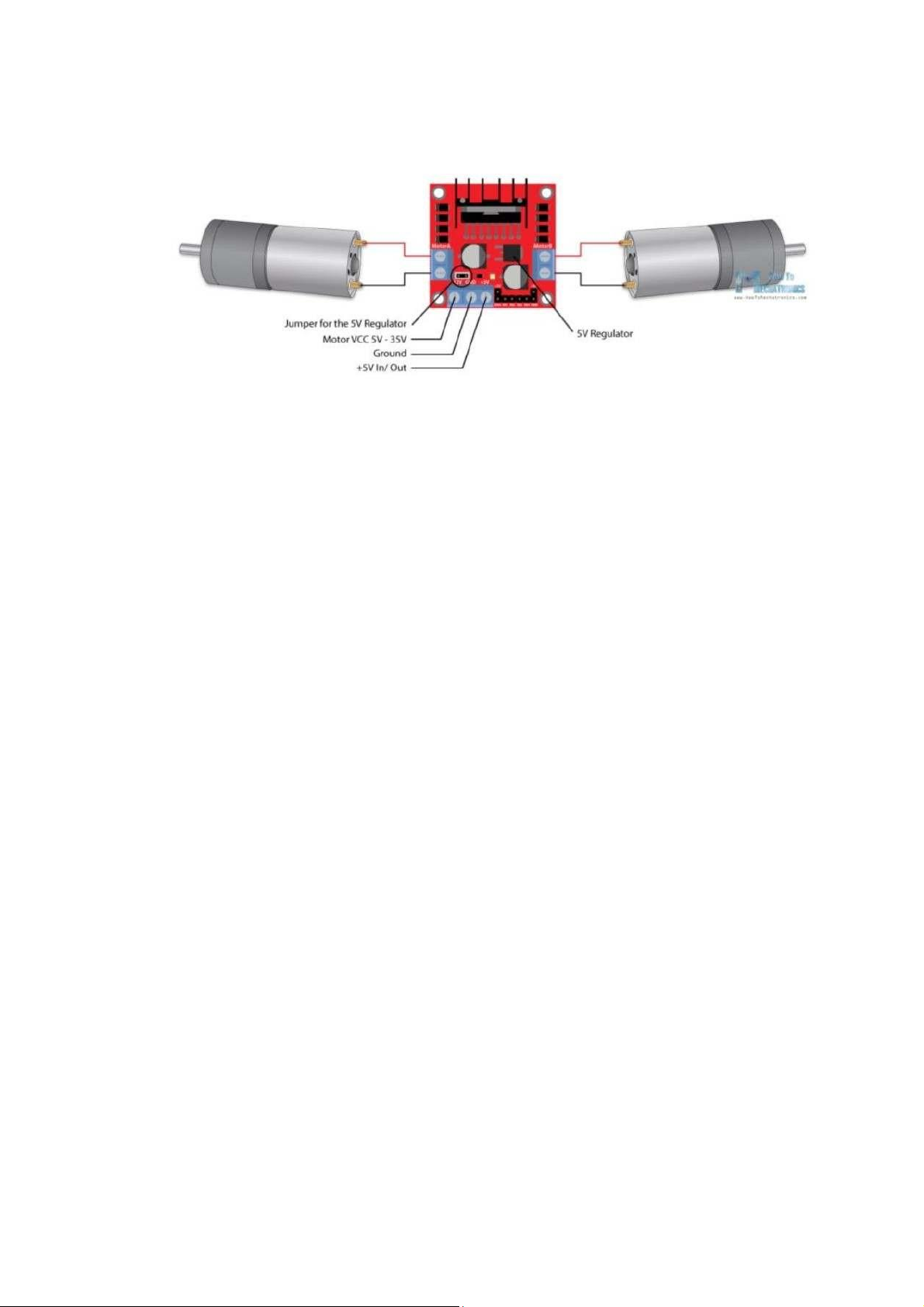
2.2.4 Khối driver động cơ
Điều khiển động cơ DC bằng mạch cầu H Mặt khác, để điều khiển hướng quay, chúng ta
chỉ cần đảo ngược hướng của dòng điện qua động cơ, và phương pháp phổ biến nhất để
làm điều đó là sử dụng mạch cầu H. Một mạch cầu H chứa bốn chân chuyển mạch, điện
trở hoặc MOSFET, với động cơ ở trung tâm tạo thành một cấu hình giống như chữ H. lOMoAR cPSD| 58675420
Bằng cách kích hoạt hai công tắc cụ thể cùng một lúc, chúng ta có thể thay đổi hướng của
dòng điện, do đó thay đổi hướng quay của động cơ. L298N là trình điều khiển động cơ H-
Hình 2.6 Khối điều khiển động cơ
Tiếp theo là các đầu vào điều khiển logic. Các chân Bật A và Bật B được sử dụng để bật
và kiểm soát tốc độ của động cơ. Nếu một dây có mặt trên chân này, động cơ sẽ được
kích hoạt và hoạt động ở tốc độ tối đa, và nếu chúng ta loại bỏ dây, chúng ta có thể kết
nối một đầu vào PWM với chân này và theo cách đó kiểm soát tốc độ của động cơ. Nếu
chúng ta kết nối chân này với Ground, động cơ sẽ bị vô hiệu hóa. Các chân Đầu vào 1 và
Đầu vào 2 được sử dụng để điều khiển hướng quay của động cơvà đầu vào 3 và 4 cho
động cơ B. Sử dụng các chân này, chúng tôi thực sự điều khiển các công tắc của mạch
cầu H bên trong IC L298N. Nếu đầu vào 1 ở mức THẤP và đầu vào 2 là CAO thì động
cơ sẽ di chuyển về phía trước và ngược lại, nếu đầu vào 1 ở mức CAO và đầu vào 2 ở
mức THẤP thì động cơ sẽ di chuyển lùi. Trong trường hợp cả hai đầu vào đều giống
nhau, cùng THẤP hoặc CAO, động cơ sẽ dừng. Điều tương tự áp dụng cho đầu vào 3 và 4 và động cơ B lOMoAR cPSD| 58675420 2.2.5 Khối xử lí
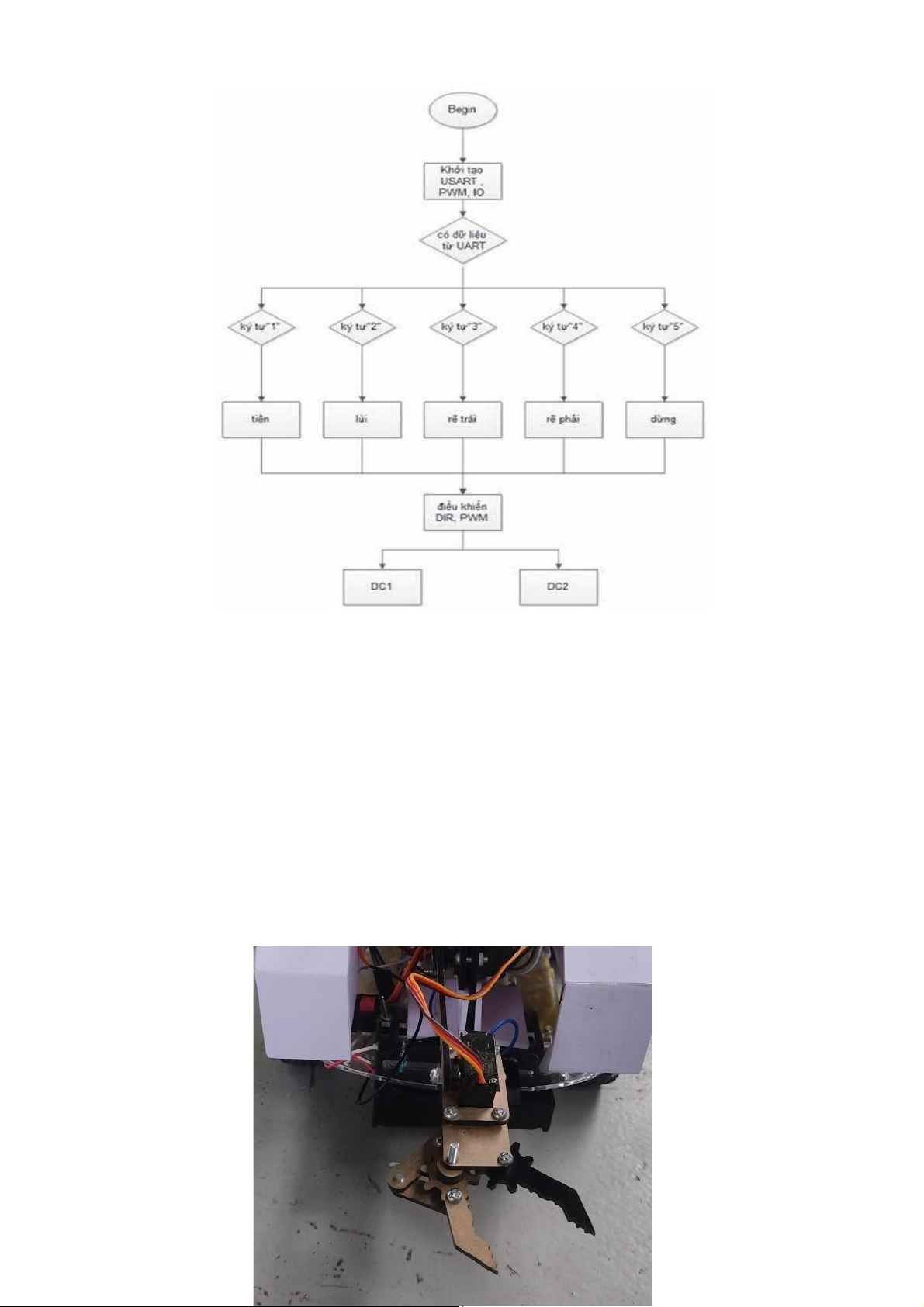
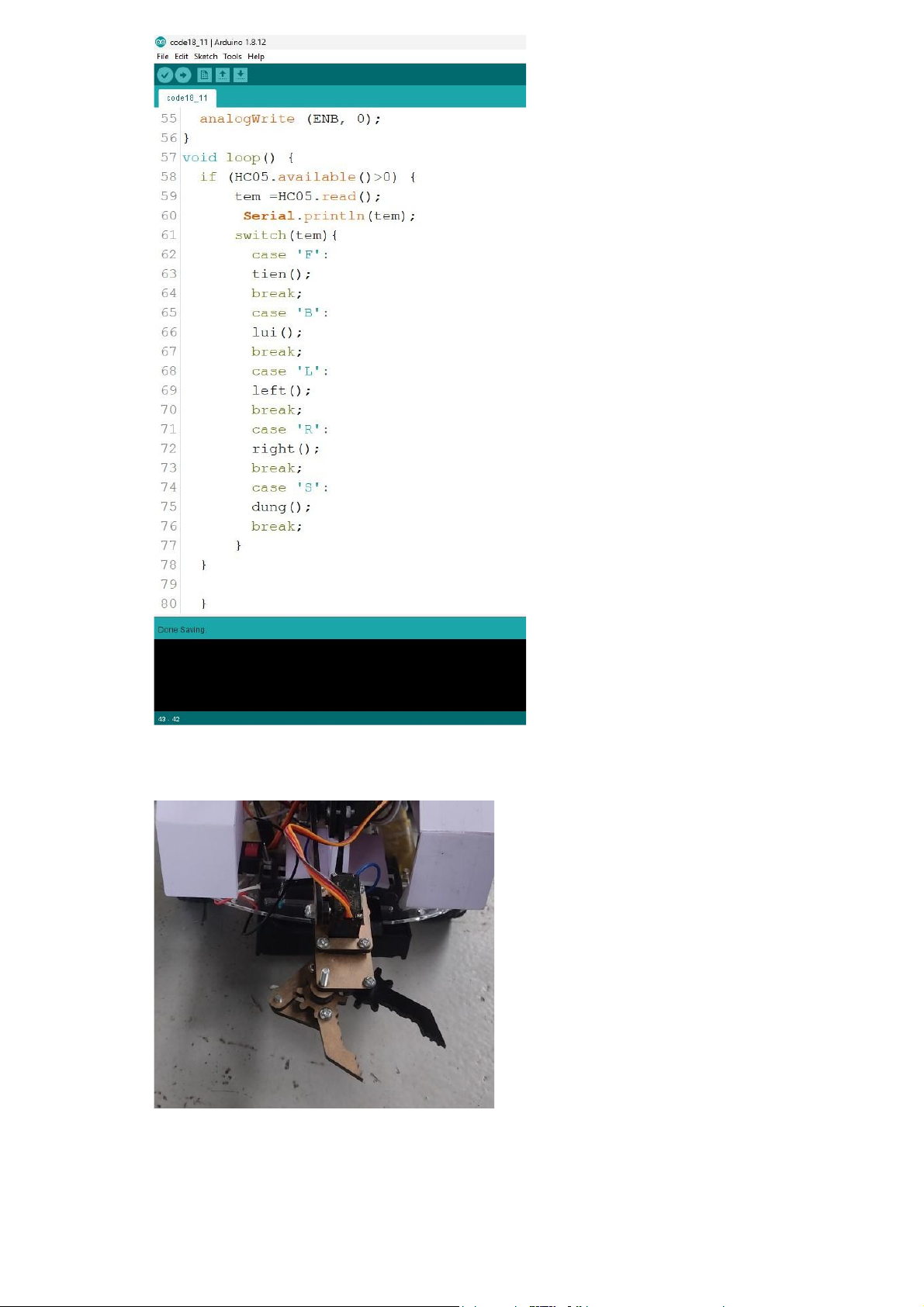
Hình 2.7 Thuật toán cho Arduino Hình 2.8 Code cho Arduino 2.2.6 Khối tay kẹp
Sử dụng 2 servo MG90S để điểu khiển tay kẹp lên xuống và gắp thả đồ vật Hình 2.9 Tay gắp robot lOMoAR cPSD| 58675420 Hình 2.10 Servo MG90S
Chương 3. THI CÔNG HỆ THỐNG
Sinh viên trình bày kết quả thi công phần cứng và những kết quả xây dựng trên phần mềm 3.1. GIỚI THIỆU
Để hoàn thiện được sản phẩm “aminal robot” chúng ta cần thi công sắp xếp các khối đã
thiết kế lên khung xe. Để cho ra sản phẩm robot mang thân hình của một chú voi có khả
năng di chuyển và gắp các đồ vật di chuyển đến các nơi cần đến. lOMoAR cPSD| 58675420
3.2. THI CÔNG HỆ THỐNG
3.2.1 Thi công moudule Bluetooth với Arduino và driver moto
Hình 3.1 Sơ đồ đi dây Arduino + driver moto và module Bluetooth
ENA L298 gắn chân 10 arduino;
ENB L298 gắn chân 11 arduino;
IN1 L298 gắn chân 7 arduino;
IN2 L298 gắn chân 6 arduino; IN3 gắn chân 5 arduino;
IN4 L298 gắn chân 4 arduino; lOMoAR cPSD| 58675420 Hình 3.2 code Arduino
3.2.2 Thi công tay kẹp và servo
Hình 3.3 Tay kẹp sau khi lắp ghép xong lOMoAR cPSD| 58675420
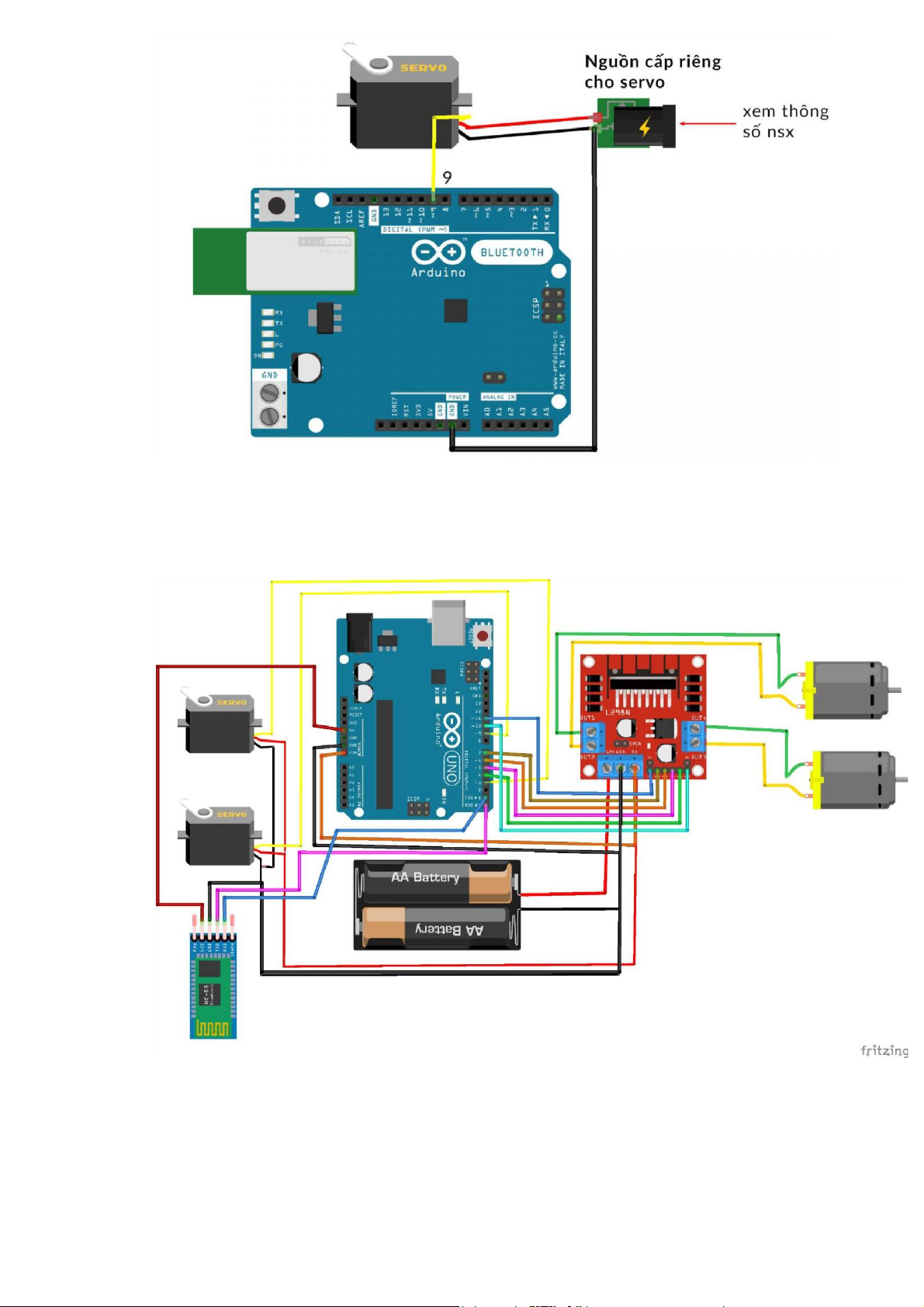
Hình 3.3 Sơ đồ đi dây cho servo
3.2.2 Thi công hoàn thiện mạch
Hình 3.4 Sơ đồ đi dây toàn bộ hệ thống lOMoAR cPSD| 58675420
Chương 4. KẾT QUẢ THỰC HIỆN
Sinh viên trình bày kết quả của quá trình làm đề tài nghiên cứu được những gì kèm
theo minh chứng và giải thích, đánh giá kết quả đạt được
4.1. Kết quả thực hiện 4.2. Hướng phát triển
Tài liệu liên quan:
-
Sách Mạng truyền thông Công nghiệp | Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
34 17 -

Tổng hợp mạch khuếch đại tín hiệu nhỏ | Môn Công nghệ kỹ thuật điện tử - viễn thông - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
181 91 -

Giải tích mạch Diode | Môn Công nghệ kỹ thuật điện tử - viễn thông - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
143 72 -

Giải bài tập Môn Công nghệ kỹ thuật điện tử - viễn thông | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
100 50