Chuẩn bị thí nghiệm Vật lý đại cương 1 | Lý thuyết vật lý đại cương | Trường Đại học khoa học Tự nhiên
Thước phụ T’ có thể trượt dọc trên thân thước chÌnh T. Tổng số độ chia nhỏ nhất N trên du xíc cho phép xác định cấp chính xác của thước. Du xích được chế tạo theo nguyên tắc: giá trị N độ chia nhỏ nhất của du xích đúng bằng giá trị của (N-1) độ chia nhỏ nhất của thước chính.
Môn: Vật lý (VL) 43 tài liệu
Trường: Trường Đại học Khoa học tự nhiên, Đại học Quốc gia Hà Nội 1.1 K tài liệu
Tác giả:








Preview text:
BK – Đại Cương Mn PhÆi
Chœ : B i chuẩn bị n y chỉ cần t m tắt những l thuyết v c ng thức
cơ bản, tr nh b y được những bước đo. Kh ng cần chØp to n bộ
t i liệu chuẩn bị th nghiệm
Do anh chưa vẽ được h nh nŒn cÆc bạn cần vẽ thŒm một
số h nh vẽ l thuyết ở trong t i liệu v o b i chuẩn bị n y B i 1
L m quen với cÆc dụng cụ đo độ d i v khối lượng
I. Mục đch th nghiệm:
L m quen với cÆc dụng cụ đo độ d i v khối lượng II. Giới
thiệu cÆc dụng cụ đo: 1. Thước kẹp:
Thước kẹp l dụng cụ dùng để đo độ d i c cấp ch nh xÆc từ 0,1-0,02mm. Hầu hết các thước
kẹp đều c cÆc vạch chia theo hệ mØt (SI) v hệ Inch (Anh). Một thước kẹp điển h nh c cấu
tạo gồm thước chính T và thước phụ T’ (du xích).
Thước ch nh T c cÆc vạch chia cách đều nhau sao cho giÆ trị của một độ chia nhỏ
nhất l a=1mm (theo hệ mØt).
BK – Đại Cương Mn PhÆi
Thước phụ T’ có thể trượt dọc trên thân thước ch nh T. Tổng số độ chia nhỏ nhất N trên
du xíc cho phép xác định cấp ch nh xÆc của thước. Du xích được chế tạo theo nguyŒn
tắc: giÆ trị N độ chia nhỏ nhất của du xích đúng bằng giÆ trị của (N-1) độ chia nhỏ nhất của thước ch nh.
Gọi b l giÆ trị một độ chia nhỏ nhất trŒn du x ch ta c :
𝑁𝑏 = (𝑁 − 1)𝑎 hay 𝑎 − 𝑏 = ∆= 𝑎 (1) 𝑁
Với ∆= 𝑎 − 𝑏 l cấp ch nh xÆc của thước kẹp.
Thước kẹp được thiết kế sao cho khi hai cạnh của mỏ kẹp đo kích thước ngo i sÆt nhau
th vạch 0 của thước T và T’ sẽ trøng kh với nhau. Kích thước D của một vật đo bằng thước
kẹp được xác định theo c ng thức sau: 𝐷 = 𝑛. 𝑎 + 𝑚. ∆ (2) Trong đó:
n (nguyên), đọc trên thước ch nh T, l tổng số độ chia nhỏ nhất nằm giữa vạch 0 của thước
T v vạch 0 của thước T’.
m (nguyên), đọc trên du xích T’, là tổng ố độ chia nhỏ nhất nằm giữa vạch 0 v vạch thứ
m của thước T’ (Vạch thứ m l vạch trøng kh t với một vạch nào đó trên thước T).
Như vậy để đọc đúng kết quả đo cần phải xác định ch nh xÆc cÆc giÆ trị của m v n trong
c ng thức (2). Tøy thuộc v o vị trí tương đối của vạch 0 trên T’ với vach thứ n v
n+1 trŒn T, sẽ c 3 khả năng xảy ra như trong tài liệu hướng dẫn th nghiệm đã trình bày. 2. Panme:
Panme l dụng cụ đo độ dài dùng để đo những vật có kích thước nhỏ với độ chính xác lên
đến 10 m (0.01mm) hoặc 1 m (0.001mm), nŒn c n gọi là thước micromet. Một thước
Panme c cấp ch nh xÆc 0.01mm sử dụng trong th nghiệm n y bao gồm:
Thước ch nh T l một thước kẹp gồm 2 dªy vạch chia đều đến 1mm, đặt lệch nhau
0.5 mm qua một đường nằm ngang gọi là đường chuẩn.
BK – Đại Cương Mn PhÆi
Thước phụ T’, gọi là du xích, có 50 vach chia, được thiết kế c thể xoay tr n quanh thân
thước T nhờ liŒn kết ren với trục vit di động.
Kích thước D của một vật được xác định th ng qua c ng thức sau: 𝐷 = 𝑛. 𝑎 + 𝑚. ∆ (3)
Hoặc 𝐷 = 𝑛. 𝑎 + 𝑚. ∆ + 0,50 (4) Trong đó:
a = 1mm l giÆ trị một độ chia nhỏ nhất trên thước T n l giÆ trị của vạch
thuộc dªy vạch trŒn của thước kẹp, sÆt mØp du x ch nhất. m l giÆ trị của vạch
trŒn du x ch trøng hoặc nằm gần đường chuẩn nhất.
C ng thức (3) døng khi kh ng c vạch n o nằm giữa mØp du x ch v vạch n. C ng thức số (4)
được døng khi c một vạch thuộc dªy vạch dưới của thước kẹp nằm giữa mØp du x ch v vạch thứ n.
Lưu ý: Khi sử dụng Panme để đo kích thước của vật, kẹp vật v o giữa 2 đầu trục v t cố định
và di động. Điều chỉnh trục vít di động sao cho khoảng cÆch giữa 2 trục v t bằng k ch thước của vật:
Để tăng khoảng cÆch giữa 2 trục v t, ta xoay trục vít di động ngược chiều kim đồng hồ bằng cÆn v t to
Để giảm khoảng cÆch giữa hai trục v t, xoay trục vít di động cøng chiều kim đồng
hồ bằng cÆn v t nhỏ đến khi nghe tiếng lÆch tÆch th dừng.
BK – Đại Cương Mn PhÆi
Đọc kết quả đo: Trong trường hợp mØp du x ch rất sÆt một vạch nào đó trên thước ch nh
th ta sẽ tiến h nh lấy xấp xỉ như ví dụ trong t i liệu hướng dẫn. III. Thực nghiệm:
1. Đo cÆc kích thước của một trụ rỗng kim loại bằng thước kẹp (Vẽ h nh trụ rỗng kim loại trang 13)
Bước 1: Quan sát và xác định cấp ch nh xÆc của thước kẹp.
Bước 2: Đo 5 lần đường k nh ngo i D của trụ rỗng bằng 2 mỏ kẹp to, rồi t nh giÆ trị của D
theo c ng thức 2. V ghi kết quả v o bảng.
Bước 3: Đo 5 lần đường k nh trong d của trụ rỗng bằng 2 mỏ kẹp nhỏ ở ph a trŒn, rồi t
nh giÆ trị của d theo c ng thức . Ghi kết quả v o bảng.
Bước 4: Đo 5 lần chiều cao h của trụ rỗng bằng 2 mỏ kẹp to, rồi t nh giÆ trị của h theo c
ng thức 2. Ghi kết quả v o bảng.
2. Đo đường k nh của viŒn bi thØp bằng thước kẹp Panme
Bước 1: Kiểm tra điểm “0” của thước để xác định sai số hệ thống: vặn cÆn v t nhỏ để đầu
trục vít di động tiến sát vào đầu trục v t cố định. Nếu vạch “0” của du x ch trøng kh t với
đường chuẩn trên thước T, th kh ng c sai số hệ thống v tiếp tục thực hiện bước 2. Ngược
lại trước khi đo cần hiệu chỉnh thước hoặc xác định sai số hệ thống cho kết quả đo.
Bước 2: Kẹp viŒn bi v o giữa hai đầu trục v t cố định v di động. Đo 5 lần đường k nh D của
viên bi, xác định giÆ trị D theo c ng thức số 3 hoặc 4 v ghi v o bảng, Bài Số 2
XÁC ĐỊNH MOMEN QUÁN TÍNH CỦA VẬT RẮN ĐỐI XỨNG
I. Mục ích thí nghiệm:
Xác ịnh momen quán tính của vật rắn ối xứng.
BK – Đại Cương Mn PhÆi
I, Cơ sở lí thuyết:
Momen quán tính của một iểm cách trục quay r xác ịnh bởi: 𝐼 = 𝑚. 𝑟2 (1)
Momen quán tính hệ chất iểm ược xác ịnh bằng tổng momen:
𝐼 = ∑𝑖 𝑚𝑖𝑟𝑖2 (2)
Với m, momen với trục quay qua khối tâm ∆0 là:
Với thanh thẳng l: 𝐼0 = 𝑚𝑙122 (3) 𝑚𝑅2 Với ĩa ặc R: 𝐼0 = 2 (4)
Với trụ có bán kính R: 𝐼0 = 𝑚𝑅2 (5)
Khối cầu ặc có bán kính R: 𝐼0 = 𝑚𝑅2 (6)
Nếu tác ộng momen ngoại lực 𝜏 vào vật ể nó quay thì lò xo biến dạng góc xoắn ∅ và tạo dao ộng do lực àn hồi. 𝜏 = −𝐷𝑧. ∅ (7)
Theo ịnh lí momen ộng lượng: 𝑑𝐿 𝑑𝜔 𝑑2∅ 𝜏 = (8) 𝑑𝑡 𝑑𝑡 𝑑𝑡 𝑑2∅ 𝐷 Lấy (7) + (8) ta có: 𝑑𝑡2 + 𝐼 (9)
Phương trình mô tả chuyển ộng có chu kì: 𝑇 = 2𝜋√ 𝐼 (10) 𝐷
BK – Đại Cương Mn PhÆi Ta có: 𝐼 𝐼 = 𝐷 ( 𝑧 2𝜋)² (11)
Định lí Steiner – Huygens:
𝐼 = 𝑚𝑑2 + 𝐼0 (12)
Đặt 𝑑2 = 𝑥, với I là hàm bậc nhất với 𝑑2 II, Thực nghiệm: 1, Dụng cụ: 2, Trình tự:
2.1. Xác ịnh 𝐼0 của vật rắn ối xứng:
2.1.1 Thanh dài ồng chất
Bước 1: Dùng bộ vít, lắp thanh dài lên trục lò xo xoắn. Điều chỉnh vị trí công
quay ể khi thanh dài dao ộng, một ầu thanh dài quét qua cảm biến.
Bước 2: Nhấn RESET -> START Đèn gate xanh
Bước 3: Dùng tay xoay thanh ngược chiều kim ồng hồ khỏi VTCB góc xấp xỉ
90 ộ rồi thả tay ể thanh dao ông tự do.
Bước 4: Tháo trục xoắn. 2.1.2 Đĩa ặc:
Bước 1: Lắp ĩa lên trục quay. Dán miếng giấy lên mép ĩa. Điều chỉnh vị trí cổng
quang sao cho ĩa dao ộng, miếng giấy có thể quét qua cảm biến.
Bước 2: Thực hiện giống với thanh dài. 2.1.3 Trụ rỗng:
BK – Đại Cương Mn PhÆi
Bước 1: Lắp trụ rỗng có ĩa ỡ dưới lên trục quay. Dán miếng giấy lên mép ĩa ỡ.
Điều chỉnh vị trí cổng quang sao cho khi trụ rỗng dao ộng, miếng giấy qué qua cảm biến rỗng.
Bước 2: Thực hiện giống phép o với thanh dài. 2.1.4 Khối cầu ặc:
Bước 1: Lắp khối cầu lên trục quay, dán miếng giấy. Điều chỉnh cổng quang ể
khi khối cầu dao ộng, miếng giấy có thể quét qua cảm biến.
Bước 2: Thực hiện các bước 2,3 và 4 của phép o với thanh dài.
2.2 Nghiệm lạ Steiner – Huygens:
Bước 1: Lắp ĩa kim loại màu en sao cho tâ trùng với trục quay.
Bước 2: Thực hiện theo các bước 2,3 và 4 của phép o momen quán tính của thanh
dài. Chọn 1 giá trị chu kì dao ộng trong 5 lần o và ghi lại vào bảng ứng với d = 0(mm).
Bước 3: Tháo ĩa ra và lắp lại trên trụ quay của lò xo ể o chu kì dao ộng của ĩa ối
với các trục quay i qua các lỗ theo ứng với các vị trí d lần lượt băng 30, 60, 90, 120, và 150 milimet.
Thực hiện theo bước 2 và ghi vào bảng 2.
BK – Đại Cương Mn PhÆi B i Số 3
KHẢO SÁT DAO ĐỘNG CỦA CON LẮC VẬT LÍ XÁC ĐỊNH GIA TỐC TRỌNG TRƯỜNG
I. Mục đch th nghiệm:
Khảo sÆt dao động của con lắc vật l v xÆc định gia tốc trọng trường II, Cơ sở l thuyết:
Con lắc vật l l vật rắn bất k , khối lượng m, c thể dao động quanh 1 trục cố định nằm ngang.
VTCB của con lắc trøng với phương thẳng đứng. Khi kØo con lắc lệch khỏi VTCB 1
góc α nhỏ, rồi bu ng ra th th nh phần Pt của trọng lực P=mg tÆc dụng lŒn con lắc 1 momen lực M₁.
M₁ = -Pt.L₁ = -mgL₁sinα (1)
Với α nhỏ, ta c thể coi: M₁ ≈ -mgL₁α (2)
Pt cơ bản đối với chuyển động quay của con lắc: 𝑀₁ 𝛽 = (3) 𝐼₁
𝑑2α ở đây có 𝛽₁ =
2 , I₁ là momen quán tính của con lắc với trục quay. 𝑑𝑡 (2) + (3) => 𝑑2α 2 2 α = 0 (4)
BK – Đại Cương Mn PhÆi + ѡ₁ 𝑑𝑡 Nghiệm lại:
α = α₀cos(ѡ𝑡 + 𝜑) (5) 2𝜋 Từ (5) => T₁ = = 2𝜋 𝐼₁ (6) 𝜔₁𝑚𝑔𝐿₁
Khi đ con lắc vật l trở th nh con lắc thuận nghịch, khi dao động quanh trục , chu kì T₂: 𝐼₂ T₂ = = 2 𝜋 √ (7) 𝜔₂ 𝑚𝑔𝐿₂
Gọi 𝐼𝐺 𝑙à 𝑚𝑜𝑚𝑒𝑛 𝑞𝑢á𝑛 𝑡í𝑛ℎ 𝑐ủ𝑎 𝑐𝑜𝑛 𝑙ắ𝑐 đơ𝑛 𝑣ớ𝑖 𝑡𝑟ụ𝑐 𝑞𝑢𝑎𝑦 𝑞𝑢𝑎 𝑘ℎố𝑖 𝑡â𝑚, 𝑡𝑎 𝑐ó:
I₁ = 𝐼𝐺 + 𝑚𝐿₁2 (8)
I₂ = 𝐼𝐺 + 𝑚𝐿₂2 (9) 𝐼𝐺
Nếu T₁ = T₂ => L₁.L₂ = (10) 𝑚 Từ (6) + (7)
2(𝐿₁+𝐿₂)(𝐿₁−𝐿₂) => g = (11) 𝑇₁ 𝐿₁− 𝑇₂ 𝐿₂ Khi T₁ = T₂ = T th : 4𝜋2𝐿 g = 𝑇2 (12) III, Thực Nghiệm: a. T m vị trí X₁:
BK – Đại Cương Mn PhÆi
Bước 1: Vặn gia trọng C về sÆt quả nặng 4, khi đó x₀= 0 rồi đặt con lắc
lŒn giá đỡ theo chiều thuận.
Bước 2: Gạt th n con lắc lệch khỏi VTCB 1 g c nhỏ để con lắc dao động điều
hòa. Sau vài dao động ban đầu của con lắc, nhấn RESET, đồng hồ đo thời gian
bắt đầu đếm 50 chu kì dao động.
Bước 3: Nhấc con lắc ra khỏi giÆ, đặt lại con lắc theo chiều nghịch l lắp lại
các thao tác bước 2 để đo thời gian 50 chu k theo chiều nghịch.
Bước 4: Vặn gia trọng C về vị tr cÆch quả nặng 4, 1 khoảng 𝑥′ = x₀ + 40 (mm).
Bước 5: Biểu diễn kết quả đo thời gian 50T₁ và 50T₂ phụ thuộc vị tr x của
gia trọng C trên đồ thị.
Bước 6: Xoay gia trọng C về x₁, thực hiện bước 2 và bước 3 để đo thời
gian 50 chu k thuận v nghịch. Ghi v o bảng
Bước 7: So sánh 50T₁ và 50T₂ ở x₁
Nếu 50T₁ = 50T₂ thì x₁ là tốt nhất v thực hiện bước 8.
b. Đo T dao động con lắc thuận nghịch:
Tại vị tr tốt nhất gia trọng C thực hiện đo thời gian 50 chu kì dao động tại
mỗi trục quay thuận v nghịch 3 lần, Ghi bảng 2 Tắt máy đó, kết thœc
=> Ghi cÆc th ng số chiều d i con lắc và độ ch nh xÆc của máy đo thời
gian ∆t vào bảng số liệu.
BK – Đại Cương Mn PhÆi B i 4:
Xác định bước s ng v vận tốc truyền m trong kh ng kh bằng
phương pháp cộng hưởng s ng dừng
I. Mục đch th nghiệm:
XÆc định bước s ng v vận tốc truyền m trong kh ng kh bằng phương phÆp cộng hưởng s ng dừng.
II. Cơ sở l thuyết:
S ng l kết quả của quÆ tr nh lan truyền dao động của cÆc phần tử trong m i trường đn
hồi trong kh ng gian v theo thời gian.
Sự lan truyền được m tả bởi phương trnh toÆn học sau: 𝜕2𝑈2⃗ 2∆𝑈⃗ (1) = 𝑣 𝜕𝑡
BK – Đại Cương Mn PhÆi
Ở đy ∆ l toÆn tử Laplace, v l vận tốc truyền s ng c n 𝑈⃗ l h m số m tả sự dịch chuyển
của phần tử m i trường trong kh ng gian v theo thời gian. Trong hệ tọa độ Decartes, toÆn tử Laplace c dạng: 𝜕2 𝜕2 𝜕2
∆= 𝜕𝑥2 + 𝜕𝑦2 + 𝜕𝑧2 (2)
Nếu chỉ xØt quÆ tr nh truyền s ng theo chiều x th phương trnh truyền s ng sẽ c dạng: 𝜕2𝑈 𝜕𝑡2 = 𝑣 2 𝜕𝜕𝑥2𝑈2 (3)
Nghiệm tổng quÆt của (3) c dạng:
𝑈(𝑥, 𝑡) = 𝑈1(𝑥 + 𝑣𝑡) + 𝑈2(𝑥 − 𝑣𝑡) (4)
Trong đ 𝑈1 𝑈2 l hai h m tøy thuộc loại dao động. Trường hợp dao đng k ch th ch l
dao động điều h a th (4) được viết th nh:
𝑈(𝑥, 𝑡) = 𝑈0𝑠𝑖𝑛𝜔 (𝑡 + 𝑥𝑣) + 𝑈0𝑠𝑖𝑛𝜔 (𝑡 − 𝑥𝑣) (5)
Như vậy, U(x,t) l s ng tổng hợp của hai s ng điều h a truyền theo hai howsng ngược
nhau. Khi hai s ng phẳn c cøng biŒn độ v tần số truyền ngược nhau sẽ tổng hợp tạo ra
hiện tượng giao thoa (cộng hưởng) gọi l s ng dừng.
Vận tốc truyền s ng m xÆc định bởi:
BK – Đại Cương Mn PhÆi 𝐸 𝑣 = √ (6) 𝜌
Trong đ 𝜌 l mật độ, E l m đun đn hồi của m i trường truyền s ng.
Nếu m i trường truyền s ng m l kh l tưởng th : 𝑣 = √𝛾 𝑅𝑇 (7) 𝑀
Trong đ 𝛾 l tỉ số nhiệt dung ph n tử chất kh , R=8.31 J/mol.K l hằng số kh l tưởng,
M=29.10^-3 kg/mol l khối lượng của 1 mol kh ng kh , T l nhiệt độ tuyệt đối.
Nếu đo được v, ta sẽ t nh được hệ số 𝛾 của kh ng kh .
III. Phương phÆp thực nghiệm:
Trong th nghiệm n y nguồn tạo ra dao động s ng l một loa điện động. M ng loa sẽ rung
dưới tÆc dụng của một d ng điện xoay chiều h nh sin tần số f. Khi đ lớp kh ng kh 2 bŒn
mặt loa sẽ bị nØn, giªn liŒn tiếp nŒn dao động của m ng loa sẽ truyền cho cÆc phần tử
kh gần n tiếp tục lan ra theo tần số f.
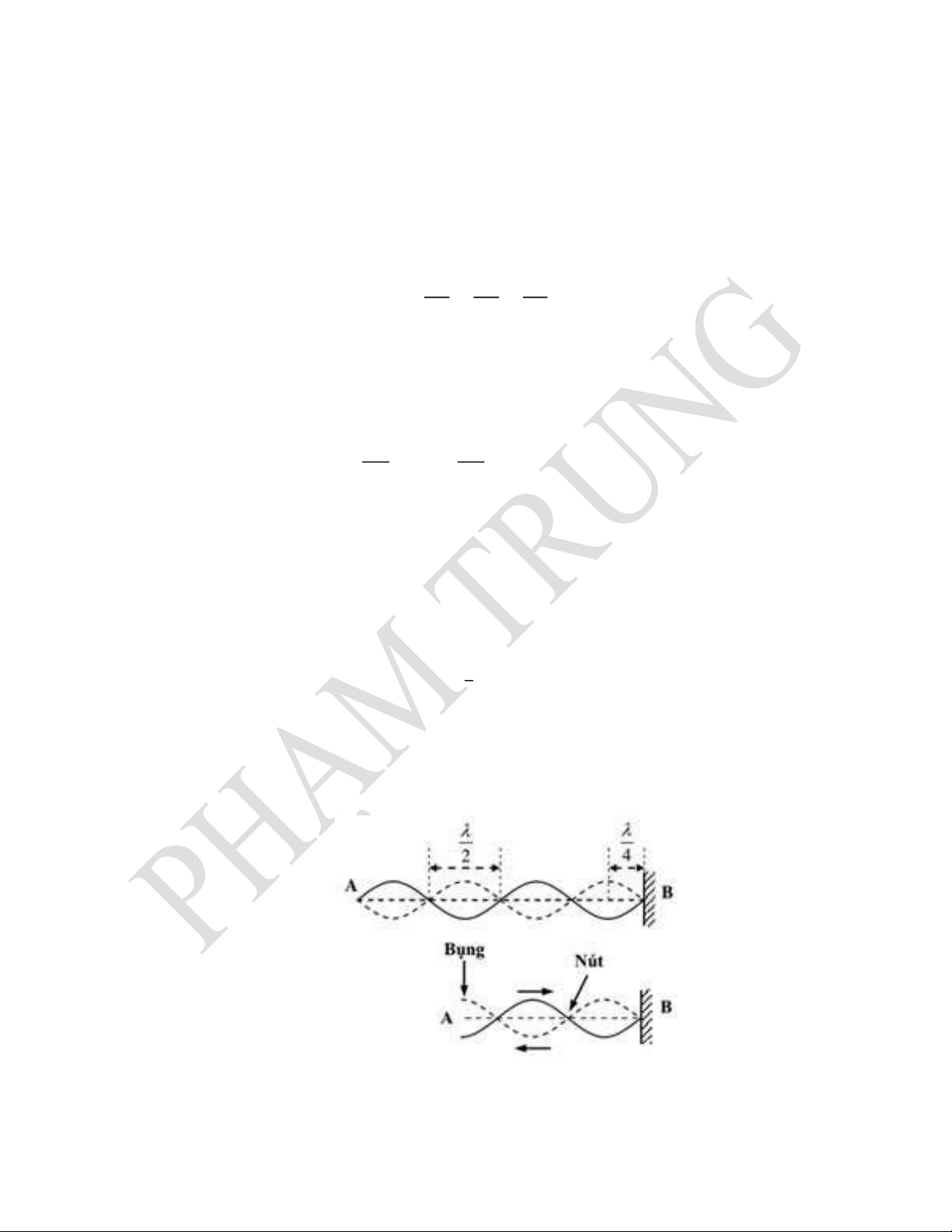
Giả sử ph a trước loa l một piston c thể dịch chuyển được. Khi đ cÆc dao động m truyền
v o trong ấm tạo nŒn một cột kh dao động với tần số f. Cố định tần số dao động f, chuyển
vị tr piston trong ống; hoặc cố định vị tr piston ta c thể nghe thấy tiếng vang rất to (bụng
s ng) rồi lặng đi (nœt s ng)
CÆc biến đổi cụ thể được tr nh b y trong trang 22 của t i liệu hướng dẫn.
IV. Tiến h nh th nghiệm 1. Chuẩn bị dụng cụ: 2. Tiến tr nh th nghiệm: Chuẩn bị
BK – Đại Cương Mn PhÆi
Cắm ph ch lấy điện v o nguồn điện 220V v bật c ng tắc ở mặt sau của mÆy phÆt tần số
để cÆc chữ số hiển thị trŒn cửa tần số.
Nhấn nœt chọn dạng s ng v chọn thang đo tần để chọn t n hiệu ra xoay chiều h nh sin trong dải 1kHz.
Quay puli để thả từ từ piston xuống sao cho mặt đÆy của piston nằm gần sÆt miếng ng
a. Khảo sÆt hiện tượng cộng hưởng s ng dừng trong ống một đầu k n một đầu hở:
Bước 1: Xoay nœm điều chỉnh tần số để c tần số f=500Hz.
Bước 2: Quay puli để kØo từ từ piston lŒn tăng độ d i L của cột kh ng kh trong ống. Lắng
nghe m thanh phÆt ra đồng thời quan sÆt kim chỉ trŒn bộ khuếch đại Mike, dừng lại ở vị
tr kim chỉ đạt cực đại đầu tiŒn v phả ra m to nhất. Ghi giÆ trị L1 v o bảng 1.
Bước 3: Tiếp tục kØo Piston lŒn cao để t m thấy vị tr tương ứng với cực đại
kế tiếp L2 v ghi kết quả v o bảng 1.
Bước 4: Lặp lại cÆc bước 1-2 với tần số f=600Hz v f=700Hz.
b. Khảo sÆt hiện tượng cộng hưởng s ng dừng trong ống hai đầu hở:
Bước 1: Xoay puli để n ng piston lŒn v đẩy n ra khỏi ống. Ta c một ống 2 đầu hở d i 1000mm.
Bước 2: Điều chỉnh tăng dần tần số mÆy phÆt ở tần số bắt đầu từ 150Hz, quan sÆt kim
trŒn bộ khuếch đại Mike, ghi lại cÆc tần số xảy ra cộng hưởng.
Bước 3: XÆc định tần số cộng hưởng thấp nhất (mode cơ bản) v cÆc tần số cộng hưởng bậc 1, 2
BK – Đại Cương Mn PhÆi Bài Số 5
XÁC ĐỊNH ĐẠI LƯỢNG CƠ BẢN TRONG CHUYỂN
ĐỘNG QUAY CỦA VẬT RẮN
1.Mục ích thí nghiệm:
Xác ịnh các ại lượng cơ bản của chuyển ộng quay của vật rắn.
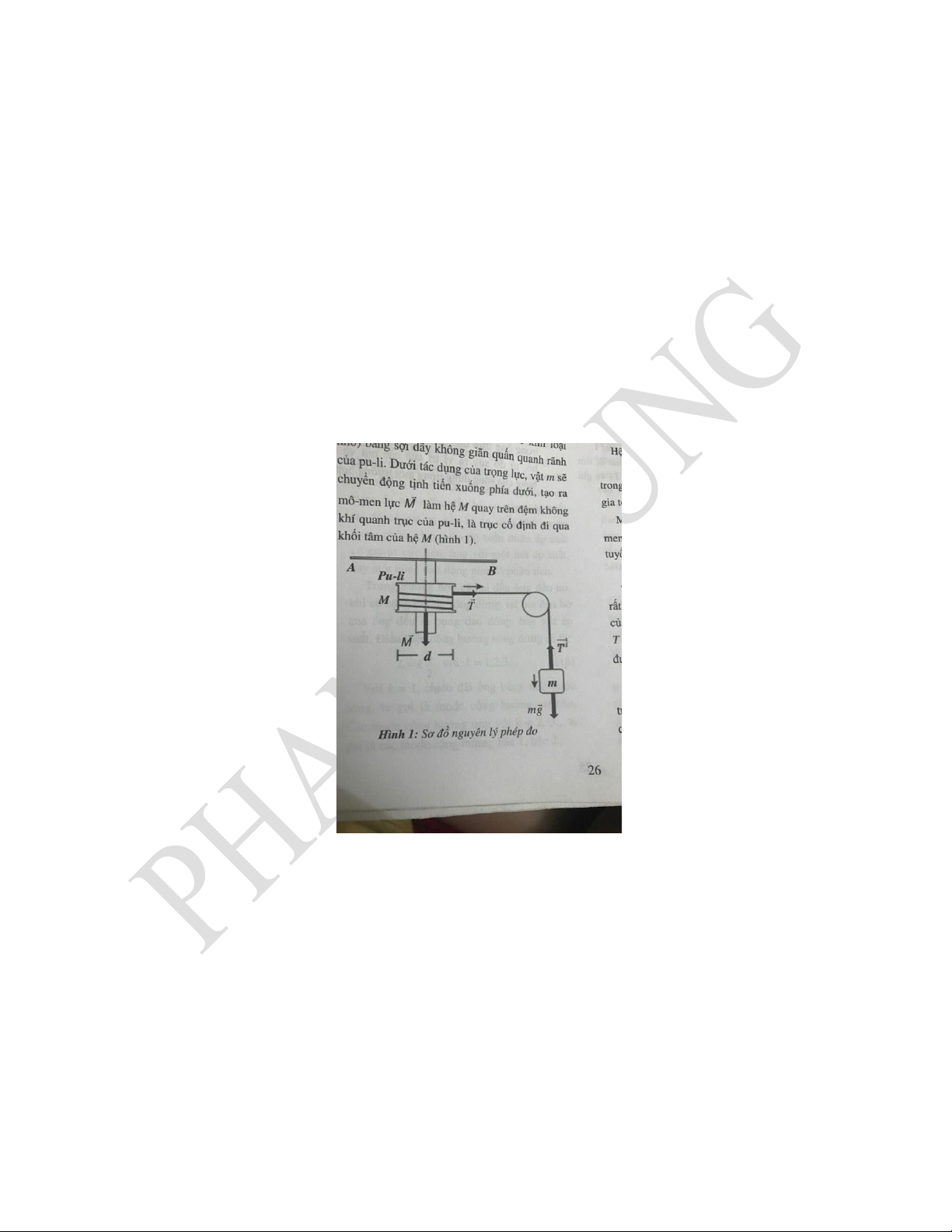
2. Cơ sở lí thuyết: Sơ ồ nguyên lí phép o
Trọng lực khiến m chuyển ộng tịnh tiến xuống dưới, tạo ra momen M làm M quay
Phương trình ộng lực học là:
𝑀⃗⃗ = I.𝐵⃗⃗ (1)
Hệ vật có momen ộng lượng: 𝐿⃗ = I.𝜔⃗ (2)
Momen lực M là momen lực căng dây T:
BK – Đại Cương Mn PhÆi
𝑀⃗⃗ = 𝑟 . 𝑇⃗ (3) Độ lớn momen lực: d M = r.T = mg (4) 2
Trong chuyển ộng quay của vật rắn quanh trục cố ịnh, mọi chất iểm của vật rắn vạch
ra những quỹ ạo tròn trên các mặt phẳng vuông góc với trục quay.
Phương trình chuyển ộng của 1 ầu thanh AB: ϕ(t) = β𝑡2 + Ѡ₀t + φ₀ (5)
với t = 0 thì ϕ(t) = β𝑡2= β (𝑡2) = βτ (6) 2
Suy ra có thể xác ịnh ược β khi có φ theo thời gian t.
Từ (1) và (4) có: mg 𝑑 = 𝐼β = I dѠ(t) ℎ𝑎𝑦 dѠ(t) = mgd 𝑑𝑡 (7) 2 dt 2I => Ѡ(t) = mgd 𝑡 (8)
2I Momen ộng lượng của hệ: L = I. Ѡ(t) = mgd 𝑡 (9) 2I
Xét ϕ= 90 thì từ (6) có: β = 𝑡Π2 (10)
Kết hợp với (4) => H = I. β (11)
3. Trình tự thí nghiệm:
3.1 Xác ịnh gia tốc góc 𝛃:
a. Xác lập ϕ₁: Điều chỉnh vị trí ban ầu
Khi quay “thanh ngang + ĩa” cùng chiều kim ồng hồ
Nhấn START, èn LED bật thì dừng lại.
BK – Đại Cương Mn PhÆi b. Đo thời gian:
Bước 1: Quấn sát chỉ vào rảnh puli, ầu sợi chỉ gắn 2 móc kim loại.
Bước 2: Xoay ĩa về vach 0 rồi ấn RESET.
Bước 3: Nâng lẫy công tắc, bật bơm khí.
Bước 4: Bập nhẹ cần iều khiển rổi thả tay.
Bước 5: Thực hiện các bước trên với các góc khác. 3.2 Xác ịnh I: a. Thay ổi m, cố ịnh d
Bước 1: Quấn chỉ vào rãnh giữa puli theo chiêu cùng chiều kim ồng hồ, ầu còn
lại treo móc kim loại khối lượng 1g.
Bước 2: Thực hiện giống cách o thời gian.
Bước 3: Lặp lại trình tự trên với m bằng 2g, 3g và 4g.
b. Thay ổi d, giữa nguyên m;
Bước 1: Gắn 2 móc kim loại ể có khối lượng m bằng 3g vào sợi chỉ
Bước 2: Thực hiện phép o thời gian chuyển ộng quay ứng với góc ϕ bằng 90 ộ
ứng với các ường kính rãnh puli khác nhau lần lượt là d bằng 10mm, 20mm và 30mm. Ghi kết quả vào bảng.
BK – Đại Cương Mn PhÆi
Bảng Số Liệu
Độ chính xác bộ ếm thời gian hiện số: (∆t)dc =
Độ chính xác của ĩa chia ộ: (∆ϕ)dc =
1.Xác ịnh gia tốc góc: a. ϕ₁: ϕ₁ = Lần o t₁(s) ∆t₁ 1 2 3 4 5 Trung bình
b. Đo thời gian chuyển ộng ứng với các góc quay khác nhau: Góc quay τ(s) t(s) Độ (⁰) Rad φ₁ = Φ₂ = φ₁ + 10⁰ Φ₃ = φ₁ + 20⁰ Φ₄ = φ₁ + 30⁰ Φ₅ = φ₁ + 40⁰ Φ₆ = φ₁ + 60⁰ Φ₇ = φ₁ + 90⁰
2. Xác ịnh momen quá tính I khi momen lực thay ổi:
BK – Đại Cương Mn PhÆi a. Thay ổi m:
Đường kính rãnh puli: d = 20,00 ± 0,02 (x 10ˆ-3) m Khối lượng mgd ˆ-6 t(s) Π mgd (x 10ˆ-3kg) M L các móc kim ₁= β₁ = 2 ₁= 𝑡 loại ược 2 𝑡 2 dùng (x10 (rad/ (x10 𝑠2) ˆ-6 N.m) Kg. 𝑚2/𝑠) 1 2 3 4 b. Thay ổi d:
Khối lượng: m = 3,00 ± 0,02 (x 10ˆ-3kg) d(x 10ˆ-3m) mgd t(s) Π mgd ˆ-6 M₂= β₂ = 2 L₂= 𝑡 2 𝑡 2 (x10 ˆ-6 N.m) (rad/𝑠2) (x10 Kg. 𝑚2/𝑠) 10 20 30
BK – Đại Cương Mn PhÆi Bài Số 6
XÁC ĐỊNH TỈ SỐ NHIỆT DUNG PHÂN TỬ Cp/Cv CỦA KHÔNG KHÍ
1. Mục ích thí nghiệm:
Xác ịnh tỉ số nhiệt dung phân tử Cp/Cv của không khí.
2. Cơ sở lí thuyết:
a. Nhiệt dung ẳng tích Cv và nhiệt dung ẳng áp Cp:
Khi truyền cho khối khí có khối lượng m, một nhiệt lượng δQ, thì nhiệt ộ của khối khí
sẽ tăng lên một lượng là dT.
Nhiệt lượng cần truyền cho 1kg chất khí ó ể nhiệt ộ của nó tăng thêm 1 ộ là nhiệt dung
riêng c, là ại lượng o bằng lượng: δQ 𝐽 𝑐 = ( . 𝐾) (1) 𝑚. 𝑑𝑇 𝑘𝑔
Nếu µ là khối lượng của 1 mol chất khí thì nhiệt dung riêng phân tử C của chất khí là: C = c. µ ( J/kmol/K) (2)
Ta lại có: dU = δQ + δA (3 )
Với δA = -PdV là công cho trong phương trình cân bằng:
Tài liệu liên quan:
-

Đề thi kết thúc học phần Học kỳ I, năm học 2024 – 2025 môn Phương pháp toán cho Vật lý | Trường Đại học Khoa học Tự nhiên, Đại học Quốc Gia Hà Nội
39 20 -

Bài số 5 : Vận tốc truyền âm trong không khí |Báo cáo thực hành vật lý đại cương | Trường Đại học khoa học Tự nhiên
368 184 -

Tổng hợp một số bài tập về lượng tử quang học | Bài tập vật lý đại cương | Trường Đại học khoa học Tự nhiên
301 151 -

Tổng hợp toàn bộ bài tập về chuyên đề lực ma sát | bài tập vật lý đại cương | Trường Đại học khoa học Tự nhiên
432 216 -

Báo cáo thực hành môn vật lý đại cương | Lý thuyết vật lý đại cương | Trường Đại học khoa học Tự nhiên
559 280