Chương 4 Các modun vào ra môn Kỹ thuật lập trình | Đại học Bách Khoa Hà Nội
Chương 4 Các modun vào ra môn Kỹ thuật lập trình | Đại học Bách Khoa Hà Nội. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời đọc đón xem!
Môn: Kỹ thuật lập trình hust 32 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.8 K tài liệu
Tác giả:






Preview text:
ĐẠI HỌC BÁCH KHOA HÀ NỘI
UNIVERSITY OF SCIENCE AND TECHNOLOGY Bài giảng
PLC và Mạng Công Nghiệp
PLC and Industrial system (ME 4501)
Giảng viên: TS. Nguyễn Anh Tuấn
Khoa Cơ điện tử – ĐHBK Hà nội
Email: tuan.nguyenanh@hust.edu.vn bktuan2000@gmail.com
Web: www.aps.edu.vn (Hệ thống sản xuất tự động) Mục lục
1. Cơ sở cho điều khiển logic
2. Tổng hợp mạch logic và Grafcet
3. Cấu trúc và nguyên lý hoạt động của PLC
4. Các mô đun vào ra
5. Kỹ thuật lập trình
6. Mạng truyền thông công nghiệp
4. Các mô đun vào ra
4.1. Mô đun đầu vào số DI (Digital Input)
4.2. Mô đun đầu vào tương tự AI (Analog Input)
4.3. Mô đun đầu ra số DO
4.4. Mô đun đầu ra tương tự AO
4.5. Mô đun kết nối mạng
4.6. Mô đun kết nối can nhiệt
4.7. Mô đun kết nối động cơ bước
4. Các mô đun vào ra
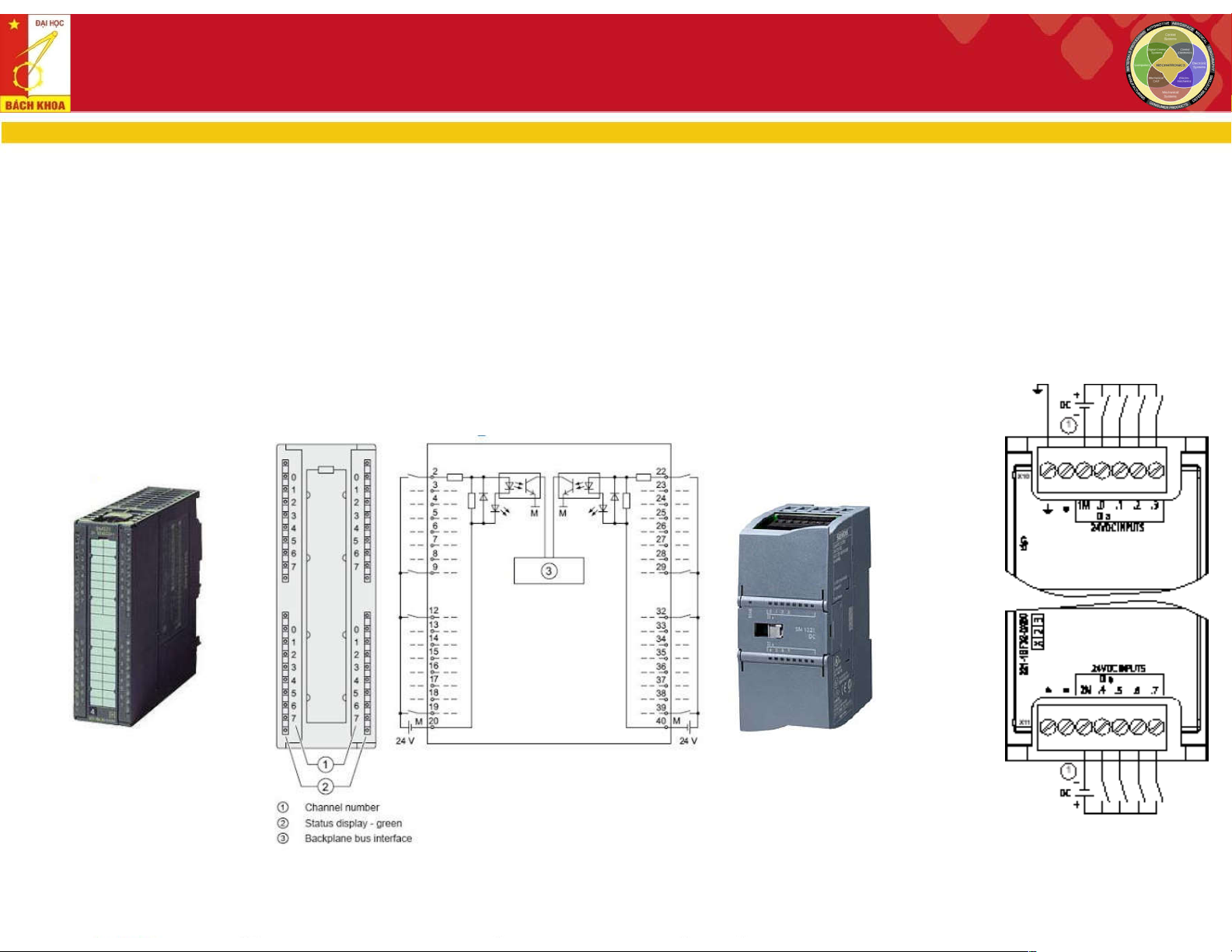
4.1. Mô đun đầu vào số DI
Là kênh để kết nối với các thiết bị ngoại vi có tính chất ON/OFF như: Các
công tắc, các loại cảm biến số, …
Nguồn cung cấp cho mô đun DI là nguồn điện một chiều 24v, 5v hoặc
nguồn điện xoay chiều 110v, 220v SIMATIC S7-300 Mô đun DI mở rộng S7-1200 CPU 1214C Digital Input CPU 314C-2 SM 321 DC/DC/DC (14DI) SM 1221 PN/DP (24DI) Siemens S7-300, 32DI 16DI, DC
4. Các mô đun vào ra
4.1. Mô đun đầu vào số DI PLC S7-1200 S7-1200 CPU 1214C DC/DC/DC (14DI) Digital Input SM 1221 16DI, DC
4. Các mô đun vào ra
4.1. Mô đun đầu vào số DI
Quy tắc kết nối mở rộng mô-đun vào số
1. Kết nối nguồn cho mô đun DI
2. Kết nối tín hiệu từ mô đun DI đến CPU
3. Kết nối thiết bị đầu vào số với DI module Mô đun DI mở Digital Input SM 1221 rộng SM 321 16DI, DC Siemens S7-300, 32DI
4. Các mô đun vào ra
4.1. Mô đun đầu vào số DI
Cách đấu nối các tiếp điểm lô gíc với mô đun DI.
Hai kiểu kết nối đối với DI
Sourcing (cấp dòng), phổ biến hơn Sinking (rút dòng) (Sourcing) (Sinking)
4. Các mô đun vào ra
4.1. Mô đun đầu vào số DI
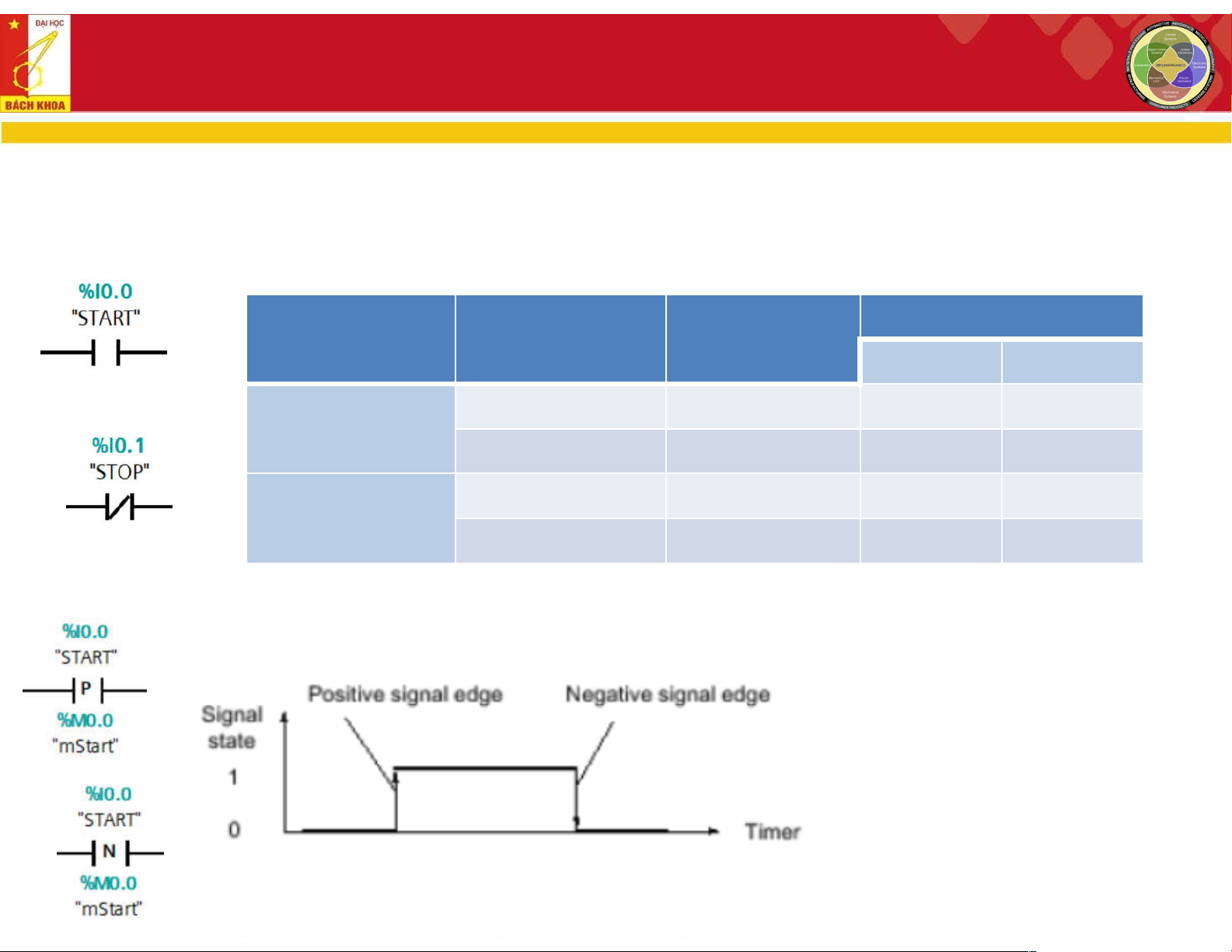
Các toán tử logic đầu vào
Tiếp điểm phần mềm Hoạt động
Tiếp điểm vật lý Tín hiệu vật lý NO NC NO NO 0 0 1 Không tác động NC 1 1 0 NO 1 1 0 Tác động NC NC 0 0 1
Q: Sử dụng tiếp điểm bắt sườn âm |N| cho nút ấn STOP (NC) thì
thời điểm kích hoạt là khi nào (khi ấn hay nhả nút ấn)?
4. Các mô đun vào ra
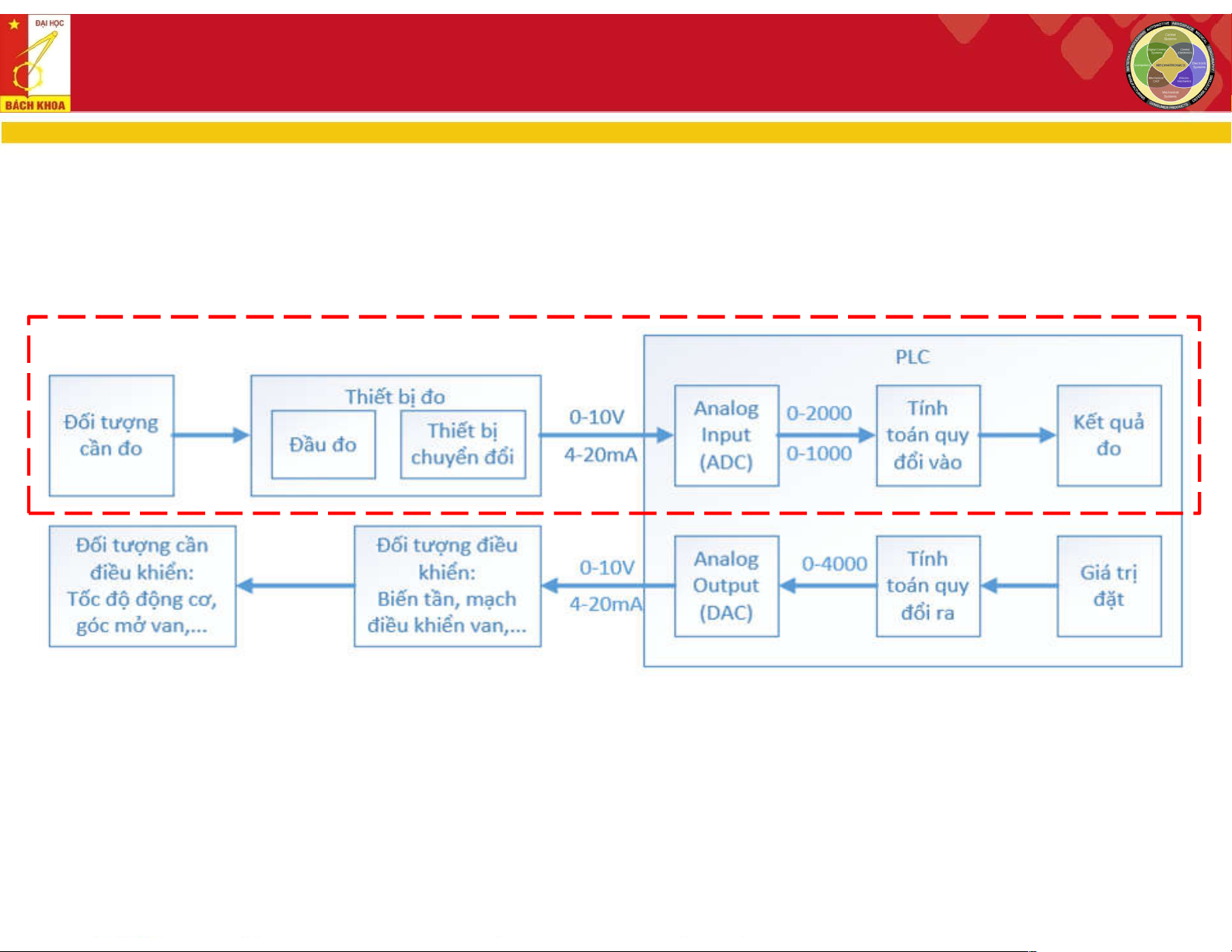
4.2. Mô đun đầu vào tương tự AI Đặc điểm
Là kênh để kết nối với các thiết bị ngoại vi với tín hiệu vào có tính chất
tương tự như: các loại cảm biến nhiệt, cảm biến ánh sáng, áp suất, …
Là một bộ chuyển đổi giá trị tương tự sang giá trị số A/D
Hiện nay trên PLC tích hợp 2 dạng ngõ vào ra analog phổ biến như sau:
+ 0-10 V: đọc điện áp analog từ 0-10V.
+ 4-20 mA: đọc dòng điện 4-20 mA.
Dạng đọc tín hiệu 4-20 mA được sử dụng trong thực tế nhiều hơn nhờ khả
năng kéo dây đi xa mà tín hiệu vẫn không bị suy yếu
4. Các mô đun vào ra
4.2. Mô đun đầu vào tương tự AI Phân loại
Mô đun đơn cực (Unipolar): có thể chấp nhận tín hiệu đầu vào chỉ thay
đổi theo giá trị dương.
Ví dụ: Giá trị điện áp ra của thiết bị từ 0-10V thì sử dụng mô đun đơn cực.
Mô đun lưỡng cực (Bipolar): Tín hiệu lưỡng cực dao động giữa giá trị
âm lớn nhất và giá trị dương lớn nhất.
Ví dụ: Thiết bị có điện áp đầu ra ±10V thì sử dụng mô đun lưỡng cực
4. Các mô đun vào ra
4.2. Mô đun đầu vào tương tự AI
Xử lý tín hiệu vào Analog
Trình tự xử lý tín hiệu vào analog trong PLC
4. Các mô đun vào ra
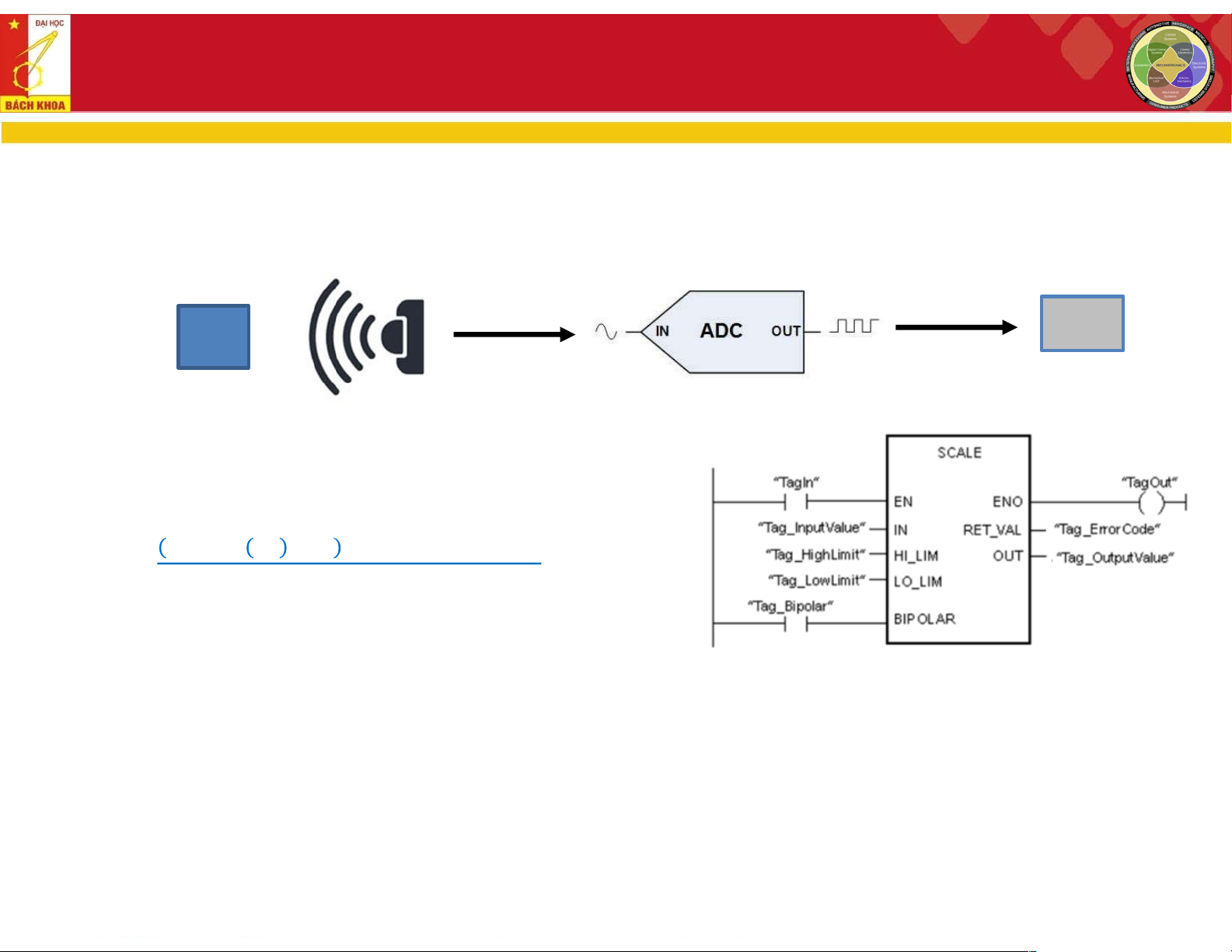
4.2. Mô đun đầu vào tương tự AI
Cách chuyển đổi tín hiệu xmin/xmax 0V/10V 0/27648 PIW -10V/10V -27648/27648 Sử dụng hàm SCALE
Công thức tính giá trị đại lượng đo OUT (Real) ∗( ) OUT= + LO LIM Trong đó:
Giá trị của hằng số K1 và K2 phụ thuộc vào trạng thái tín hiệu BIPOLAR.
Trạng thái tín hiệu là “1”: K1 = - 27648.0 ; K2 = 27648.0
Trạng thái tín hiệu là “0”: K1 = 0.0 ; K2 = 27648.0
IN: Tín hiệu đầu vào (giá trị số sau khi được convert qua bộ ADC, kiểu dữ liệu Integer).
HI_LIM và LO_LIM: Chỉ định giới hạn cao và thấp phạm vi của giá trị mà giá trị đầu vào được chia tỷ lệ.
OUT: Kết quả của hàm.
RET_VAL: Hàm trả về giá trị thể hiện cho trạng thái của hàm (lỗi hay không, mã để tra cứu lỗi).
4. Các mô đun vào ra
4.2. Mô đun đầu vào tương tự AI
Cách chuyển đổi tín hiệu
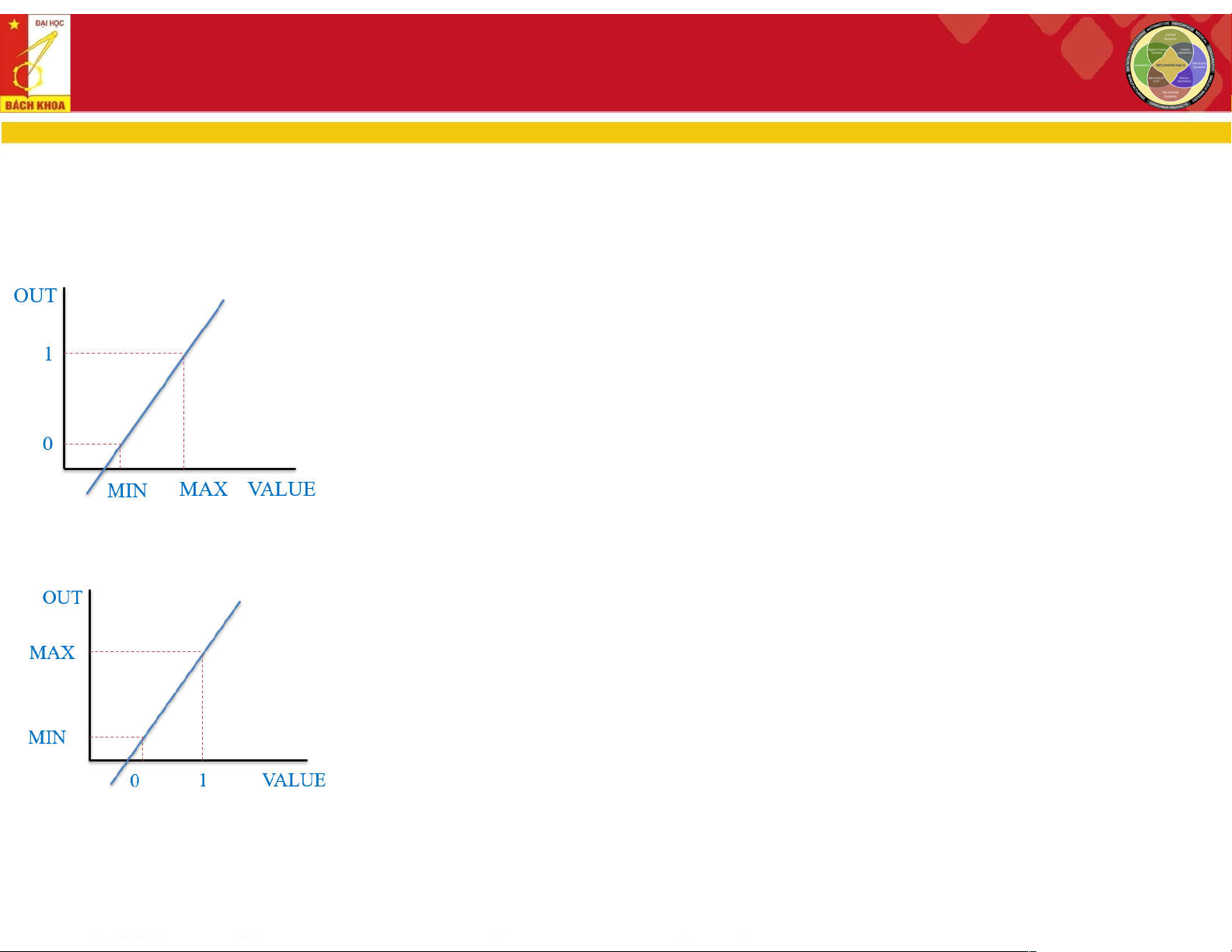
Chuyển đổi giá trị đầu vào theo ánh xạ tỷ lệ (chuẩn hóa các tín hiệu đầu vào) (hình a)
Giá trị tín hiệu đưa vào là tín hiệu tương tự dạng điện áp (0-10 V)
hoặc dòng điện (4-20 mA), tương ứng với dải giá trị số bên trong (a)
PLC có thể đọc là dải (MIN, MAX) = (0, 27648)
Khi đó cần phải chuyển đổi tín hiệu đầu vào theo một tỷ lệ. Giá trị
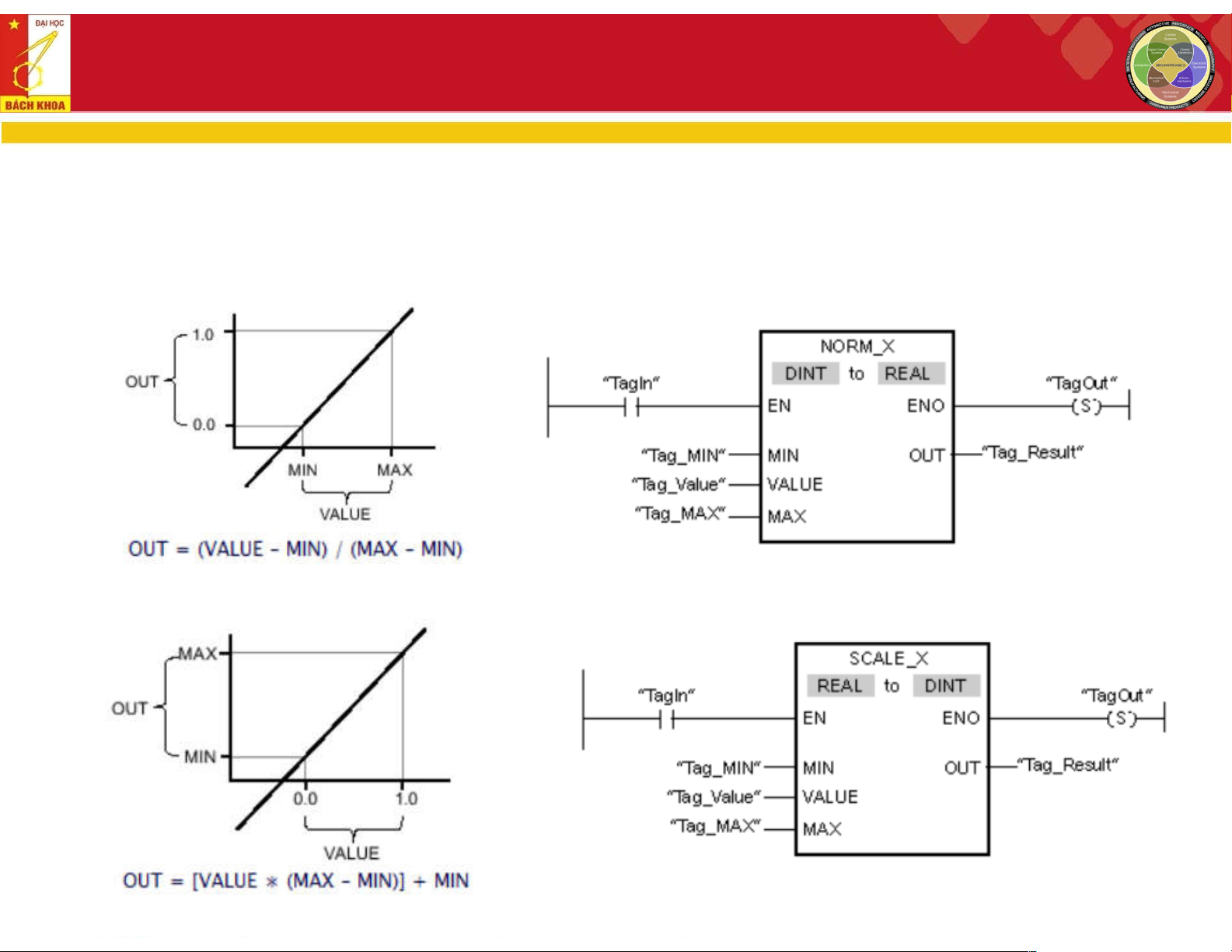
đó là OUT và nằm trong khoảng [0,1]: OUT = (VALUE-MIN)/(MAX-MIN)
Chuyển đổi giá trị số sang giá trị thực của thiết bị đo (hình b): (b)
Các giá trị MIN, MAX là giá trị giới hạn của thiết bị đo.
Đồ thị quan hệ giữa các giá trị OUT = VALUE*(MAX - MIN) + MIN
4. Các mô đun vào ra
4.2. Mô đun đầu vào tương tự AI
Cách chuyển đổi tín hiệu
Sử dụng hàm NORM_X: Normalize
Sử dụng hàm SCALE_X: Scale
4. Các mô đun vào ra
4.2. Mô đun đầu vào tương tự AI
Cách chuyển đổi tín hiệu
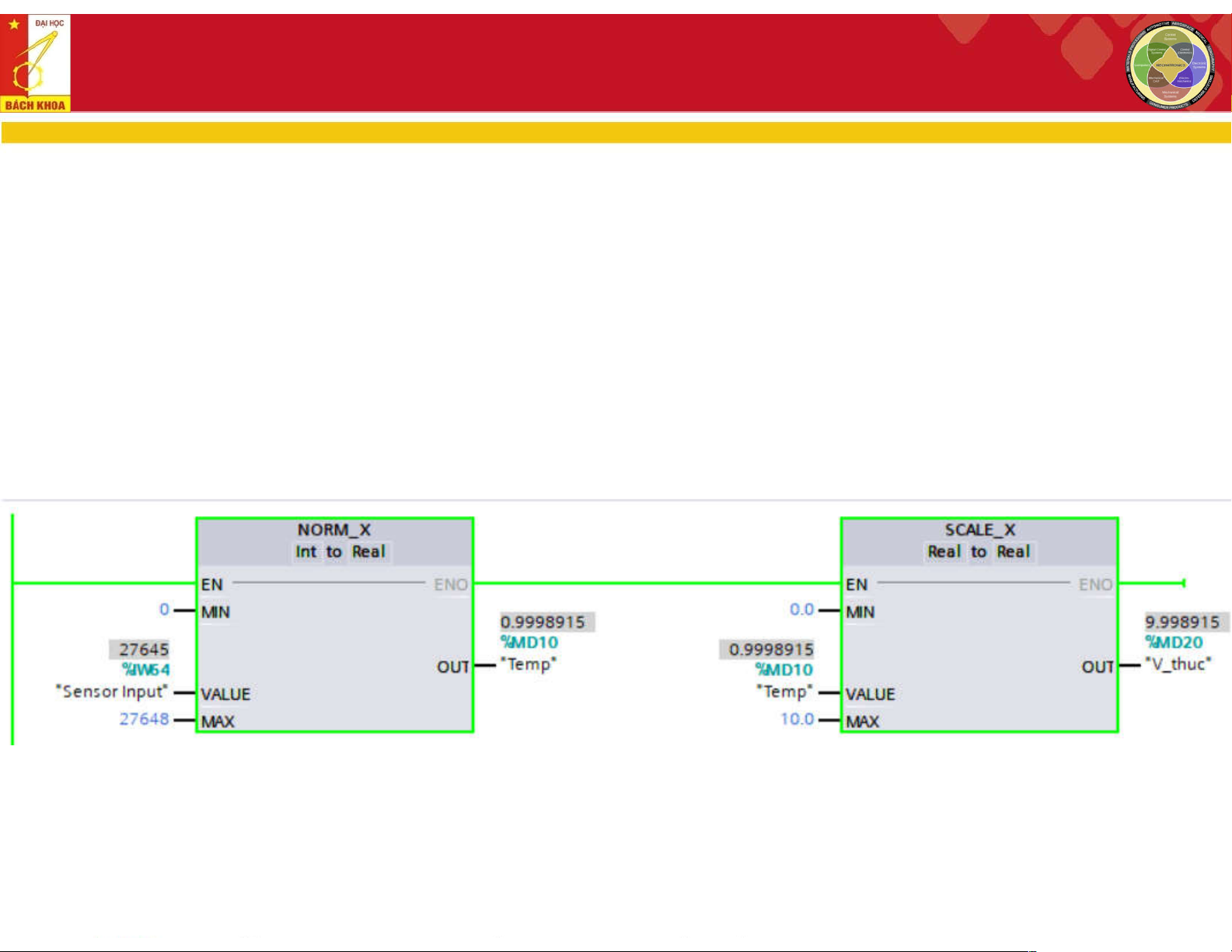
Ví dụ Xử lý tín hiệu đo của cảm biến nhiệt độ:
Khoảng giá trị nhiệt độ của cảm biến nhiệt là 0 – 2000C, giá trị chuyển đổi điện áp tương
ứng của cảm biến là 0 – 10V
Sử dụng mô-đun đầu vào analog PLC S7-1200 Siemens.
Đầu vào analog sẽ chuyển đổi giá trị 0-10V sang giá trị số tương ứng 0 – 27648 và lưu
dưới dạng dữ liệu Word và sử dụng hàm NOMR_X. Để đọc được giá trị nhiệt độ của cảm
biến từ PLC cần chuyển đổi giá trị số đã chuyển đổi tỷ lệ sang giá trị analog bằng hàm SCALE_X.
Việc chuyển đổi này được thực hiện bằng chương trình LD sử dụng hàm NORM_X và hàm SCALE_X sau:
4. Các mô đun vào ra
4.2. Mô đun đầu vào tương tự AI
Cách chuyển đổi tín hiệu
Ví dụ Hiển thị giá trị của chiết áp:
Khoảng giá trị điện áp thay đổi của chiết áp là 0 – 10V, giá trị hiển thị điện áp tương ứng
của chiết áp cũng là 0 – 10V
4. Các mô đun vào ra
4.2. Mô đun đầu vào tương tự AI
Cách chuyển đổi tín hiệu
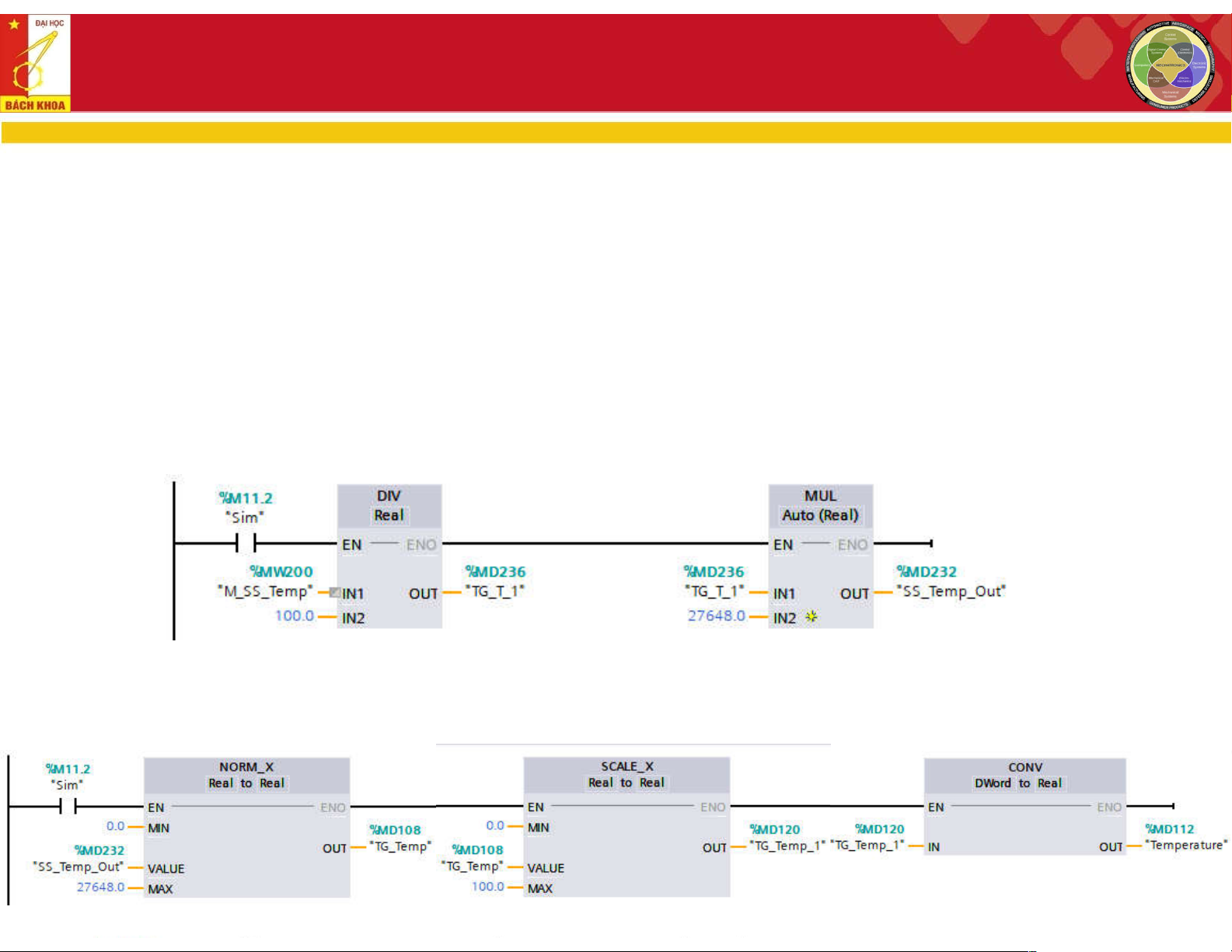
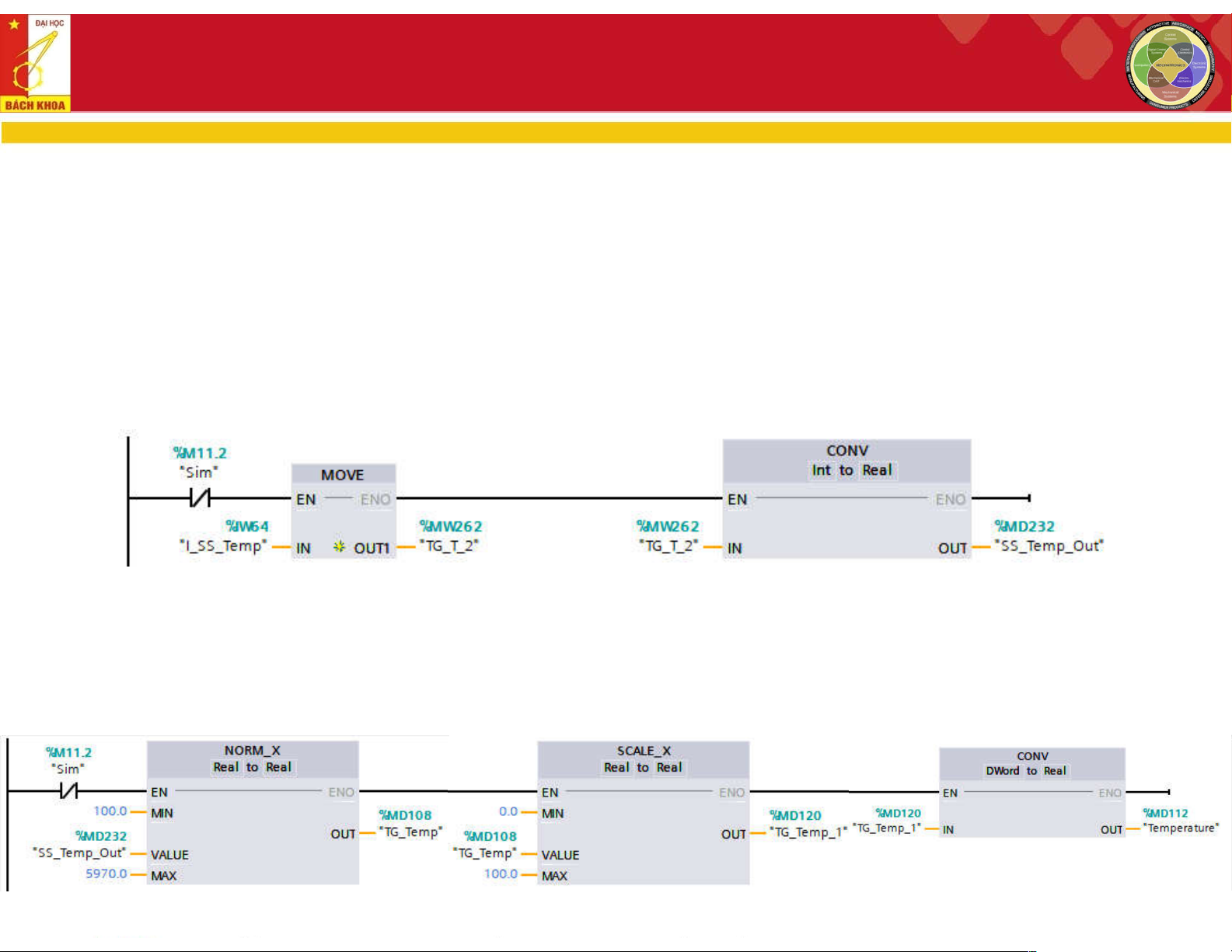
Ví dụ Cảm biến nhiệt độ 0 – 100 oC :
+ Trong chế độ mô phỏng: “Sim” = 1
Chuyển đổi nhiệt độ C giả lập sensor nhập từ bàn phím thành giá trị số (tương tự bộ ADC) ở đầu ra sensor
Nhiệt độ từ cảm biến được cấp cho hàm Norm và Scale trong chương trình PLC
để convert ra nhiệt độ thực
4. Các mô đun vào ra
4.2. Mô đun đầu vào tương tự AI
Cách chuyển đổi tín hiệu
Ví dụ Cảm biến nhiệt độ 0 – 100 oC :
+ Trong chế độ thực: “Sim” = 0
Ở chế độ cảm biến thực, tín hiệu của cảm biến nhiệt độ được convert ra số thực Real
Nhiệt độ từ cảm biến được cấp cho hàm Norm và Scale trong chương trình PLC để
convert ra nhiệt độ thực
Calip cảm biến tại 2 vị trí biên để xác định giá trị 0oC, Min=100; tại 100oC, Max=5970
4. Các mô đun vào ra
4.2. Mô đun đầu vào tương tự AI
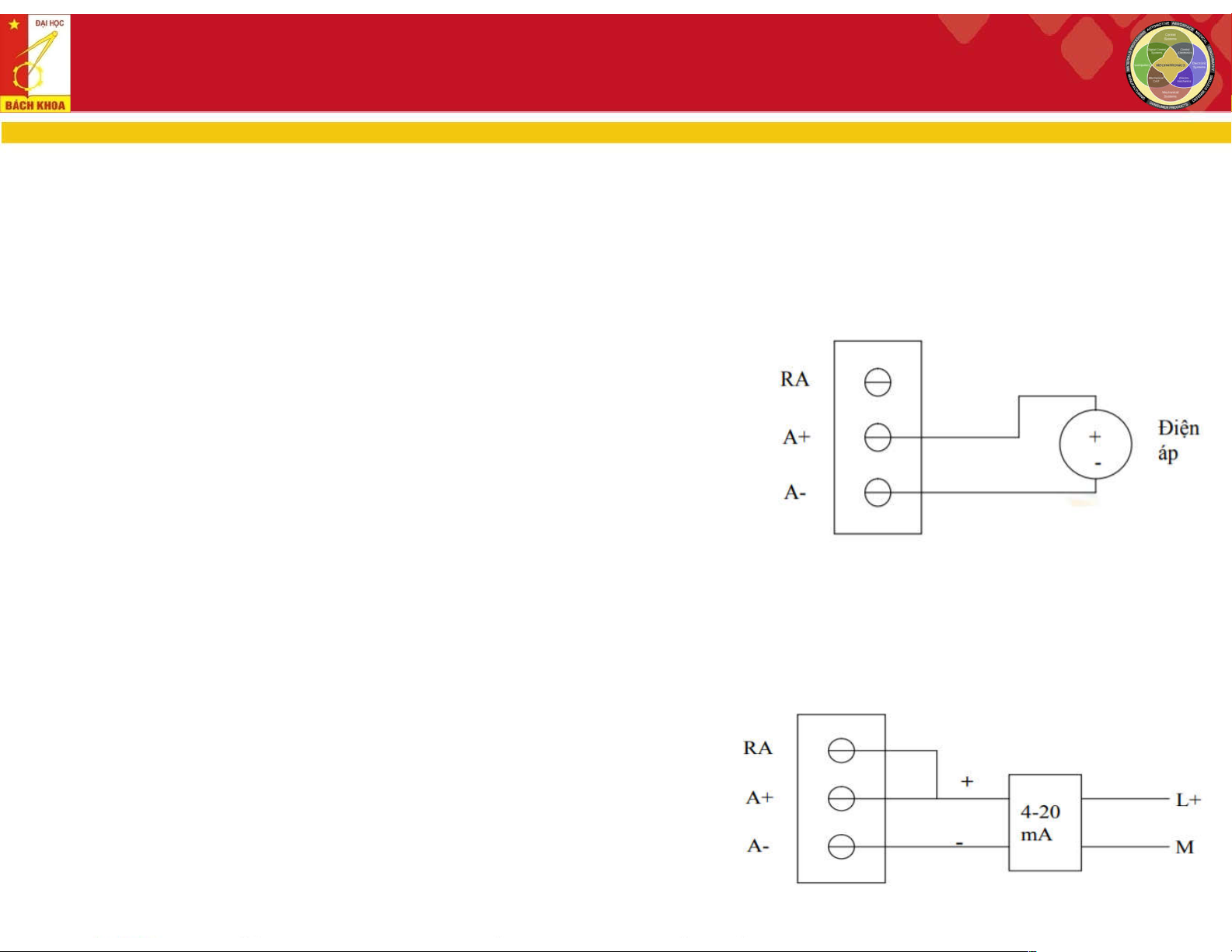
Đấu nối phần cứng
Đấu nối kiểu điện áp (hình a): chỉ cần 2 dây: A+
(hoặc AIN) và A- (hoặc AGND) để đảm bảo luôn có
thể đo được hiệu điện thế giữa hai điểm.
A+ để đấu với tín hiệu của đầu vào tương tự
A- để đấu với đất hoặc dây tín hiệu của đầu vào tương tự
Đối với cách đấu kiểu điện áp thường xảy ra sự sụt áp (a)
nếu dây dẫn dài, điện áp tại mô-đun đầu vào khác với
điện áp thực của cảm biến.
Đấu kiểu dòng điện (hình b): Dòng điện
của tín hiệu analog thường sử dụng dạng
nằm trong khoảng 0-20 mA (nếu nhỏ hơn sẽ
khó đo lường, cao hơn sẽ gây nguy hiểm) (b)
4. Các mô đun vào ra
4.2. Mô đun đầu vào tương tự AI
Đấu nối phần cứng
Ví dụ: Đấu nối với mô đun analog PLC Siemens (hình)
+ Đấu với thiết bị 2 dây (hình a): là kiểu đấu đơn giản nhất. Cực dương “+” của nguồn
đấu với đầu “+” của thiết bị, dây còn lại của thiết bị được đấu với chân “+” của mô-đun
analog. Âm nguồn được đấu với chân chân 0V của mô-đun analog.
Đấu nối thiết bị 2 dây (a), 3 dây (b), 4 dây (c) trên S7-1200 (a) (b) (c)
Tài liệu liên quan:
-

Đề thi cuối kỳ 2 năm 2024 môn Kỹ thuật lập trình C/C++ | Đại học Bách Khoa Hà Nội
30 15 -

Chương 5 - Bài giảng PLC và Mạng Công Nghiệp PLC and Industrial system môn Kỹ thuật lập trình | Đại học Bách Khoa Hà Nội
42 21 -

Câu hỏi trắc nghiệm về mảng | Kỹ thuật lập trình
49 25 -

Gỡ rối, Kiểm thử và Tinh chỉnh Mã Nguồn | Môn Kỹ thuật lập trình - Đại học Bách Khoa Hà Nội
85 43