Đáp Án Đề Thi Cuối học kì 2 năm 2021-2022 | Môn Cơ học kỹ thuật - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
Đáp Án Đề Thi Cuối học kì 2 năm 2021-2022 Môn Cơ học kỹ thuật. Tài liệu được sưu tầm gồm 4 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: cơ học kỹ thuật 10 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:
Preview text:
lOMoAR cPSD| 58675420
TRƯỜNG ĐẠI HỌC SƯ PHẠM KÝ THUẬT
ĐÁP ÁN ĐỀ THI CUỐI HK2-NH21-22 Đề THÀNH PHỐ HỒ CHÍ MINH Môn: Cơ kỹ thuật số/Mã
KHOA CƠ KHÍ CHẾ TẠO MÁY
Mã môn học: ENME130620 + ENME230720 đề : 01 Đáp án có 03 trang lOMoAR cPSD| 58675420 Câu1 1,50 đ a) 0,25 đ • ⃗𝐹⃗⃗ 𝑁 • 0,25 đ ⃗𝐹⃗⃗ 𝑁 • ⃗𝐹⃗⃗ 𝜃𝑗 0,25 đ b) • ⃗𝐹⃗⃗⃗ 𝑗 ) N 0,25 đ • 0,50 đ { 𝑁 𝑜 Câu2 1,50 đ a)
• A(0;4;6) m ; B(4;5;0) m => ⃗𝐴𝐵⃗⃗⃗⃗⃗⃗⃗⃗ 𝑚 𝐴𝐵⃗⃗⃗⃗ 𝑚 0,25 đ 0,25 đ 𝑇⃗⃗ 𝑘⃗⃗ 0,25 đ 𝑇⃗⃗ 𝑁 b) • ⃗𝑂𝐴⃗⃗⃗⃗ 𝑚 0,50 đ
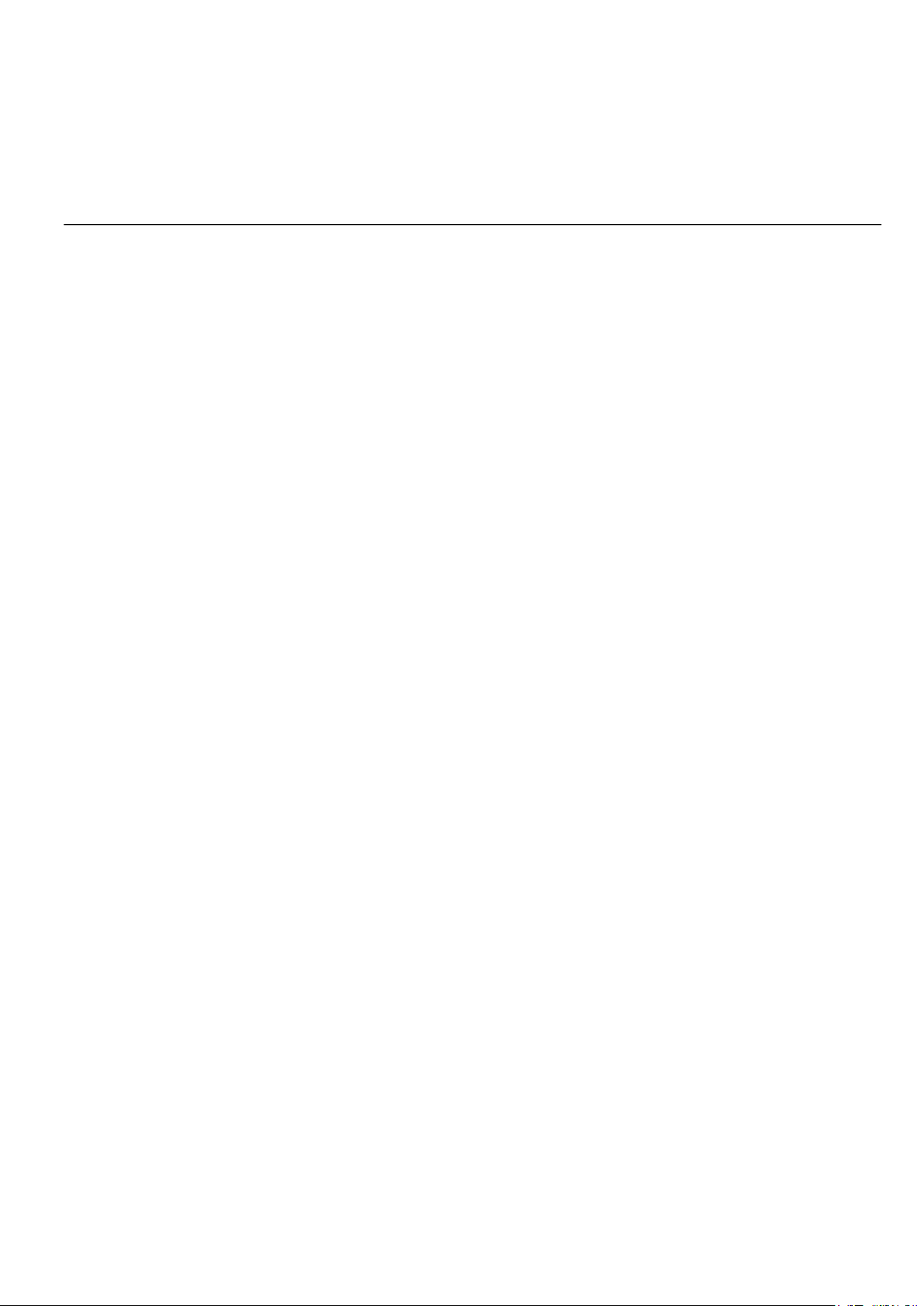
⃗𝑀⃗⃗⃗⃗⃗⃗⃗⃗𝑂 𝑟 ×𝑇⃗⃗ ⃗𝑂𝐴⃗⃗⃗⃗ ×𝑇⃗⃗ .𝑚 c) • 𝑀⃗⃗⃗⃗𝑂 .𝑚 0,25 đ Câu 3 1,50 đ 1 , 5 m 0,50 đ • Sơ đ ồ GPLK 2 m F 1 F 2 A X A B Y A Y B 3 m 3 m • 𝐹⃗ 𝑘⃗𝑁 ; 𝐹⃗ 𝑘⃗𝑁 0,25 đ • => 0,25 đ • => => 𝑘⃗𝑁 0,25 đ • => => 𝑘⃗𝑁 0,25 đ Câu 4 1,50 đ a)
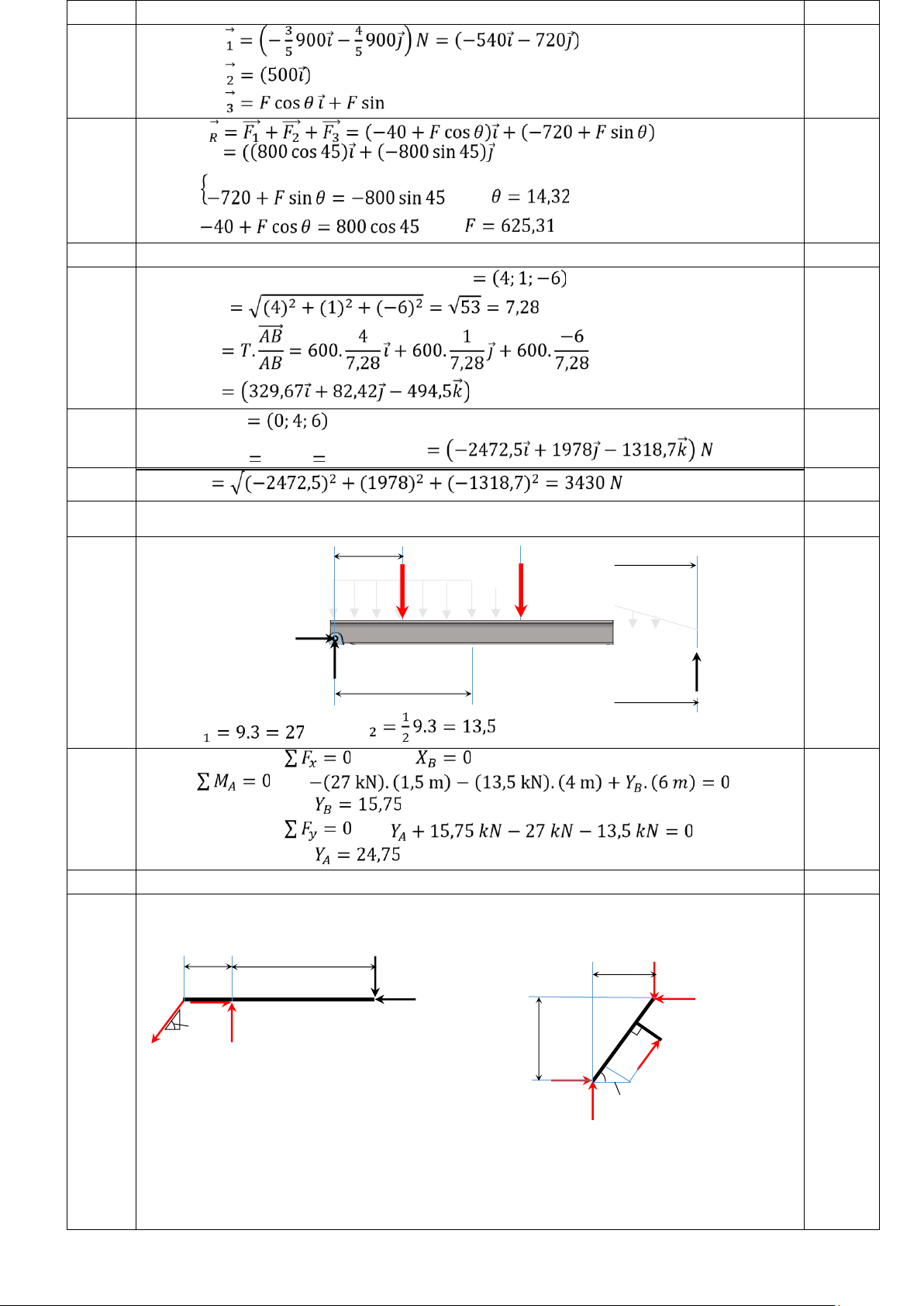
• Sơ đồ GPLK cho cánh tay robot ABC và chi tiết BDF 0,25 đ +0,25 đ 150 1 8 0 N mm Y B 600 A B mm X B B 5 4 X B C 90 N 300 mm α 3 Y B D F F D α X F 200 mm 400 mm FB YF Trang 1/3 lOMoAR cPSD| 58675420
b) Xét sơ đồ GPLK đối với cánh tay robot ABC 0,25 đ • => 𝑁 0,25 đ
c) Xét sơ đồ GPLK đối với cánh tay robot ABC • 𝑁 • 𝑁 0,25 đ
Xét sơ đồ GPLK đối với chi tiết BDF • 0,25 đ Câu 5 2,50 đ a)
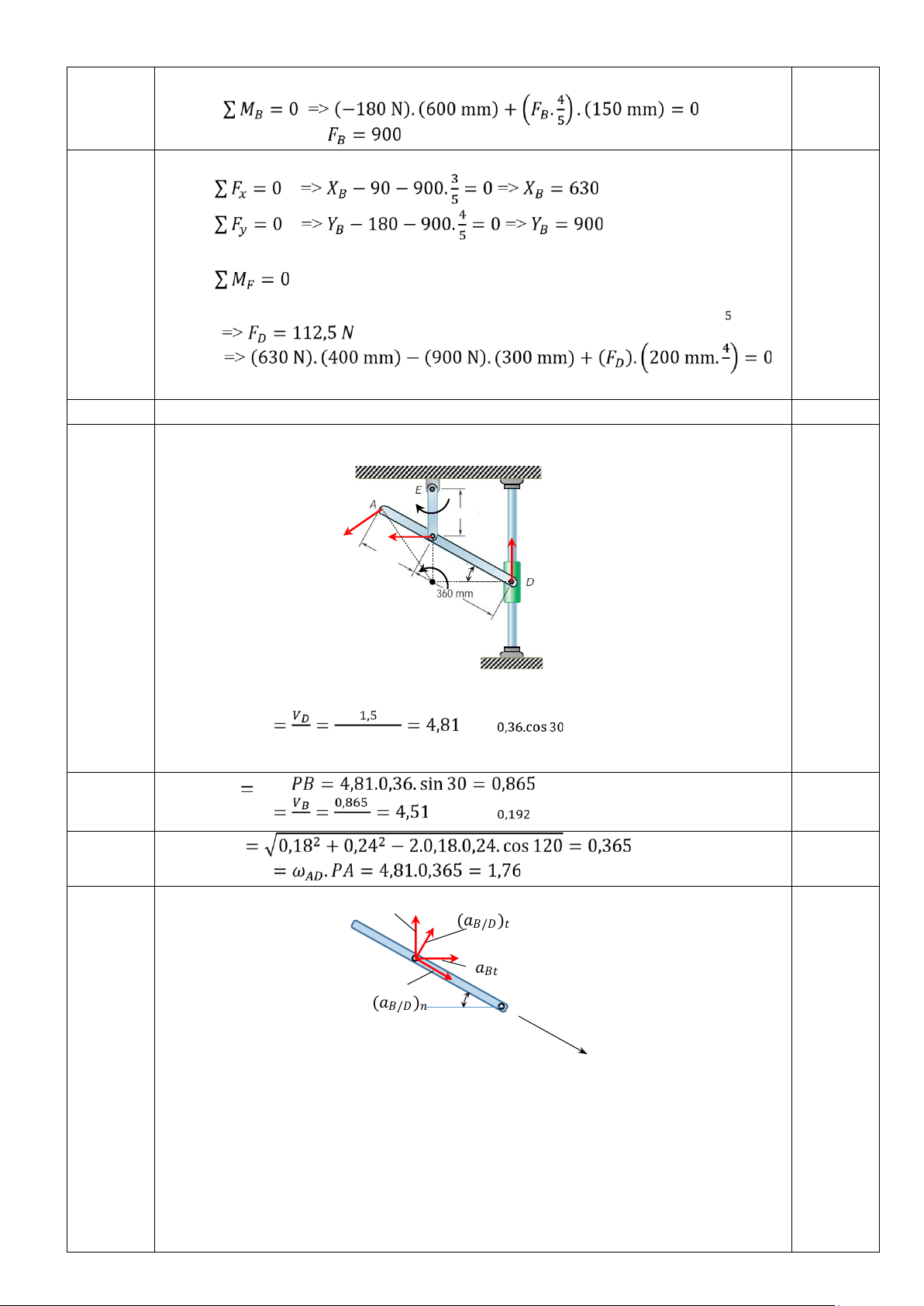
• Tâm vận tốc tức thời P của thanh AD 0,50 đ E A ω BE 192 mm V A V B V B D = 1,5 m/s=const 240 mm 30 o ω D AD P 360 mm • 0,25 đ 𝜔 𝐴𝐷 𝑃𝐷 𝑟𝑎𝑑/𝑠
Trừ 0,25 nếu thiếu biểu diễn vận tốc góc các thanh và vận tốc dài các điểm b)
• 𝑉𝐵⃗⃗⃗⃗ 𝜔𝐴𝐷. 𝑚/𝑠 0,50 đ • 𝜔𝐵⃗⃗⃗⃗𝐸 𝐵⃗⃗⃗⃗𝐸 𝑟𝑎𝑑/𝑠 0,25 đ c) • 𝑃𝐴 𝑚 0,25 đ • 𝑉 0,25 đ 𝐴 𝑚/𝑠 d) • Hình vẽ
⃗𝑎⃗⃗⃗𝐵⃗⃗⃗⃗𝑛⃗⃗⃗ 0,25 đ A (⃗ 𝑎 ⃗⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗
𝐵⃗⃗⃗⃗ / 𝐷 ) 𝑡 ⃗ ⃗ ⃗ ⃗ B 𝑎 𝐵⃗⃗⃗⃗𝑡
⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ 30 o ( 𝑎 𝐵⃗⃗⃗⃗ D / 𝐷 ) 𝑛 x
• 𝑎⃗⃗⃗⃗𝐵⃗⃗⃗⃗𝑡⃗⃗ +⃗𝑎⃗⃗⃗𝐵⃗⃗⃗⃗𝑛⃗⃗⃗ = 𝑎⃗⃗⃗⃗𝐷 +(⃗⃗⃗𝑎⃗⃗⃗𝐵⃗⃗⃗⃗⃗⃗/⃗⃗𝐷⃗⃗⃗)⃗⃗ 𝑡
+(⃗⃗⃗𝑎⃗⃗⃗𝐵⃗⃗⃗⃗⃗⃗/⃗⃗𝐷⃗⃗⃗⃗)⃗⃗𝑛 (1) 𝑎
𝐵⃗⃗⃗⃗𝑡 = 𝐵⃗⃗⃗⃗𝐸.𝛼𝐵⃗⃗⃗⃗𝐸 = 0,192𝛼𝐵⃗⃗⃗⃗𝐸 ; 𝑎𝐵⃗⃗⃗⃗𝑛 = 𝐵⃗⃗⃗⃗𝐸.𝜔𝐵⃗⃗⃗⃗𝐸2 = 0,192.4,512 𝑚/𝑠2 ;
𝑎𝐷 = 0 ; (𝑎𝐵⃗⃗⃗⃗/𝐷)𝑛 = 𝐵⃗⃗⃗⃗𝐷.𝜔𝐴𝐷2 = 0,36.4,812 𝑚/𝑠2
Chiếu (1) lên trục x trùng với AD, chiều dường từ A đến D:
0,192𝛼𝐵⃗⃗⃗⃗𝐸.cos30−0,192.4,512.cos60 = 0,36.4,812 0,25 đ
=> 𝛼𝐵⃗⃗⃗⃗𝐸 = 61,83 𝑟𝑎𝑑/𝑠2 lOMoAR cPSD| 58675420 Câu 5 1,50 đ • Động năng: 𝑇⃗ 0,25 đ 1 = 0 (Cơ hệ đứng yên) 𝑇⃗ 2 = 𝐼𝐴𝜔𝐴2 +
𝐼𝐵⃗⃗⃗⃗𝜔𝐵⃗⃗⃗⃗2 + 𝐼𝐺𝜔𝐺2 𝐼
𝐴 = 𝐼𝐵⃗⃗⃗⃗ = .10.0,12 = 0,05 𝑘⃗𝑔.𝑚2 ; 𝐼𝐺 = 150.0,42 = 24 𝑘⃗𝑔.𝑚2 2 0 ,5. 𝜔
𝜔𝐴 = 𝜔𝐵⃗⃗⃗⃗ = 𝐺 = 5𝜔𝐺 Trang 2/3
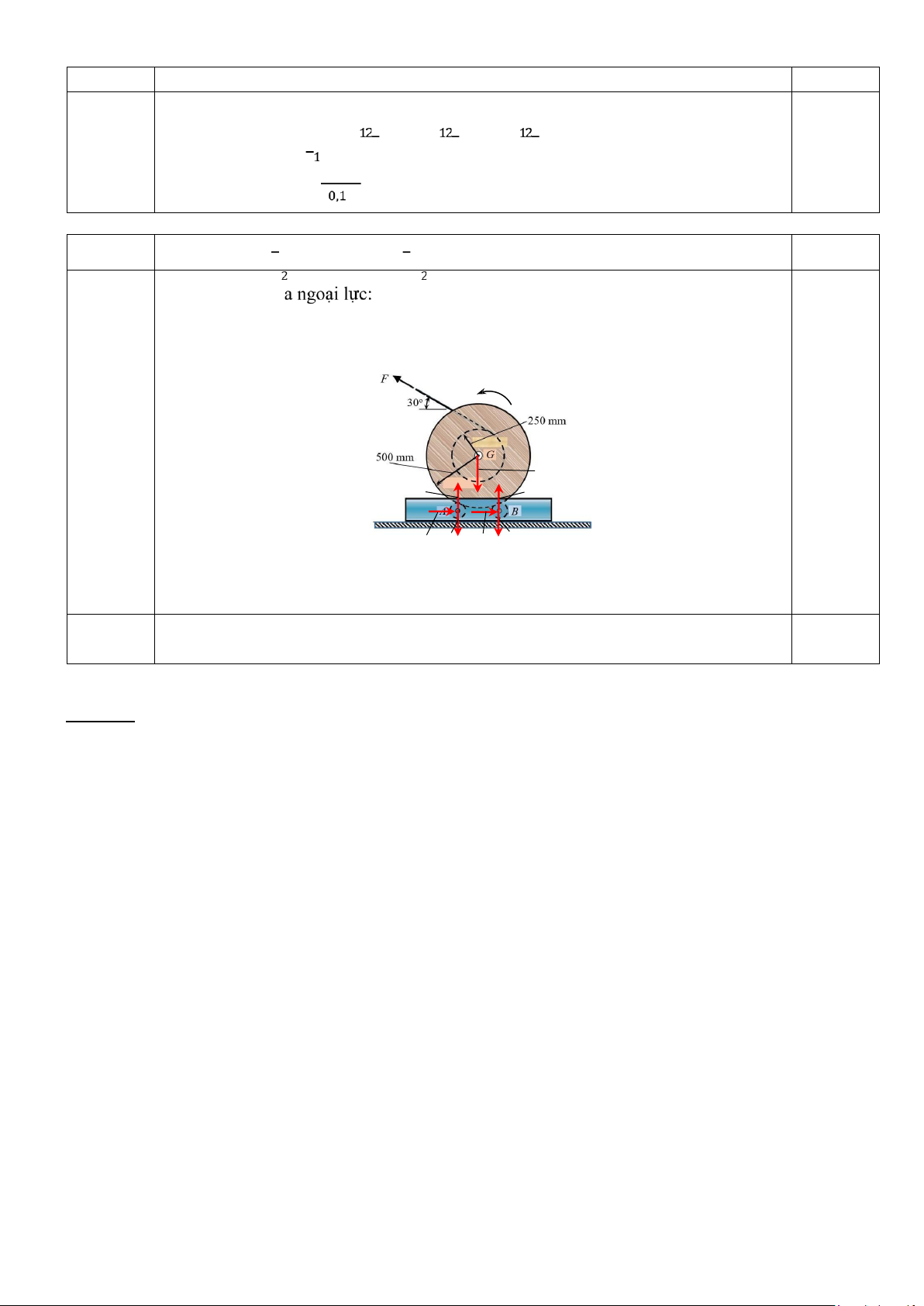
𝑇⃗2 = 2. .0,05.(5𝜔𝐺)2 + 1 .24.𝜔𝐺2 = 13,25𝜔𝐺2 1 0,50 đ • 0,50 đ Công củ
∑𝐴1−2 = 𝐹⃗.𝑠 = (30 𝑁).(10.2.0,25.𝜋) = 150𝜋 = 471 𝐽 ω G P G Y A Y B X XB PB A PA
Trừ 0,25 đ nếu thiếu biểu diễn ngoại lực tác dụng lên cơ hệ
• Áp dụng định lý động năng: 0,25 đ
𝑇⃗2 −𝑇⃗1 = ∑𝐴1−2 => 𝜔𝐺 = 5,96 𝑟𝑎𝑑/𝑠
Ghi chú: Sinh viên có lời giải khác đáp án nhưng đúng vẫn cho điểm tối đa. 3/3
Tài liệu liên quan:
-

Bài Kiểm Tra 2 học kì 2 năm 2022-2023 | Môn Cơ học kỹ thuật - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
83 42 -

Bài giảng: Định nghĩa moment lực | Môn Cơ học kỹ thuật - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
132 66 -

Lựa chọn động cơ điện và tính toán công suất truyền động | Môn Cơ học kỹ thuật - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
121 61 -

Phân Tích Lực Tác Dụng Trên Giá Treo | Môn Cơ học kỹ thuật - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
97 49