Đề bài: Trình bày cơ sở lý thuyết, ứng dụng và mô phỏng hệ chopper-motor- môn truyền động điện –Trường Đại học bách khoa Hà Nội
Phần 1. Giới thiệu
Trong phần này, em sẽ giới thiệu tổng quan về các vấn đề nổi cộm của động cơ điện một chiều (DCM) nói riêng và động cơ nói chung, bao gồm: khởi động, dừng hãm, điều chỉnh tốc độ và đảo chiều. Tiếp theo đó là giới thiệu về các hệ truyền động của DCM.
Đề bài: Trình bày cơ sở lý thuyết, ứng dụng và mô phỏng hệ chopper-motor- môn truyền động điện –Trường Đại học bách khoa Hà Nội
Tài liệu gồm 8 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao
Môn: Truyền động điện 30 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.8 K tài liệu
Tác giả:



Preview text:
Trường đại học Bách Khoa Hà Nội Viện Điện
Sinh Viên: Phạm Thế Tiệp MSSV: 20181784
Giảng viên hướng dẫn: TS. Nguyễn Duy Đỉnh
Đề bài: Trình bày cơ sở lý thuyết, ứng dụng và mô phỏng hệ chopper-motor. 1 Tổng quan
Hiện nay, động cơ (motor) được sử dụng vô cùng phổ biến và là một thành phần không
thể thiếu trong đời sống. Nó có mặt trong các tất cả mọi lĩnh vực và trải dài từ công suất
nhỏ đến công suất lớn và rất lớn, ví dụ như: trong quạt tản nhiệt của máy tính (vài watt),
các thiết bị gia dụng (vài trăm watt), xe điện (vài kw-vài trăm kw), …Với sự quan trọng
và tầm ảnh hưởng của nó nên việc phân tích, nghiên cứu các vấn đề xoay quanh là điều
vô cùng quan trọng và cần thiết, cụ thể: Trong môn “Truyền động điện” đã giới thiệu về
tổng quan các động cơ bao gồm các vấn đề nổi cộm như: Khởi động, dừng, hãm, điều
chỉnh tốc độ và đảo chiều. Trong khôn khổ bài báo cáo này, em xin được trình bày một
góc rất nhỏ của động cơ, đó là về DC motor (động cơ điện một chiều) với hệ truyền động
chopper – motor (xung áp - động cơ) (đây là một trong ba hệ truyền động của DCM -
“generator - motor”, “thyristor - motor”, “chopper - motor”). Trong bài báo cáo, em sẽ
chia thành năm phần với nội dung như sau: Phần 1 sẽ là phần giới thiệu tổng quan về các
vấn đề chung của DCM và ba phương pháp cùng với ưu, nhược điểm của từng loại
phương pháp. Sau đó sẽ là phần đi sâu vào phân tích hệ chopper – motor sẽ được trình
bày ở phần 2. Phần 3 sẽ là phần mô phỏng bằng Psim để trực quan quan sát hệ thống.
Phần 4 sẽ là phần tổng hợp. Cuối cùng sẽ là phần dành cho future work - phần 5.
Mặc dù đã được giảng dạy rất cụ thể và nhiệt tình từ giảng viên: TS. Nguyễn Duy Đỉnh.
Tuy nhiên, do trình độ và kinh nghiệm chưa đủ sâu nên trong bài báo cáo có thể sẽ còn
những thiếu sót nên rất mong được sự góp ý và bổ sung từ thầy và người đọc. 2 Phần 1. Giới thiệu
Trong phần này, em sẽ giới thiệu tổng quan về các vấn đề nổi cộm của động cơ điện một
chiều (DCM) nói riêng và động cơ nói chung, bao gồm: khởi động, dừng hãm, điều chỉnh
tốc độ và đảo chiều. Tiếp theo đó là giới thiệu về các hệ truyền động của DCM. 1.1
Các vấn đề cơ bản của DCM
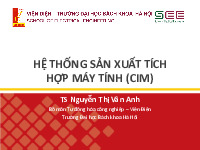
Hình 1. Mạch điện đơn giản hóa của DCM.
Trước khi vào vấn đề ta sẽ liệt ra một số công thức cơ bản:
- Phương trình đặc tính cơ: V R ω= a a − T 2 (1) k . ϕ e m ( k . ϕ m )
Hình 8. Đồ thị đặc tính cơ của DCM - Độ cứng: 2 −(k . ϕ β= m ) (2) Ra
- Phương trình đặc tính cơ điện: V R ω= a a − I k . ϕ e (3) m k . ϕ m a. Vấn đề khởi động 3
Từ (3) ta có thể thấy, khi khởi động (tức ω=0). Nên dòng khởi động của động cơ là V
I = a . Nếu áp trực tiếp điện áp V
thì dòng khởi động sẽ rất lớn (có thể lên gấp start R a , rate a
10-25 I rate). Do vậy, vấn đề khởi động là vấn đề là vấn đề vô cùng quan trọng để duy
trì sự vận hành lâu dài và tuổi thọ của động cơ.
❖ Khởi động bằng cách thêm điện trở phần ứng. •
Bằng cách thêm điện trở vào mạch phần ứng sẽ làm giảm độ cứng của đặc
tính cơ, khiển cho dòng điện và momen mở máy của động cơ giảm xuống (hình 2)
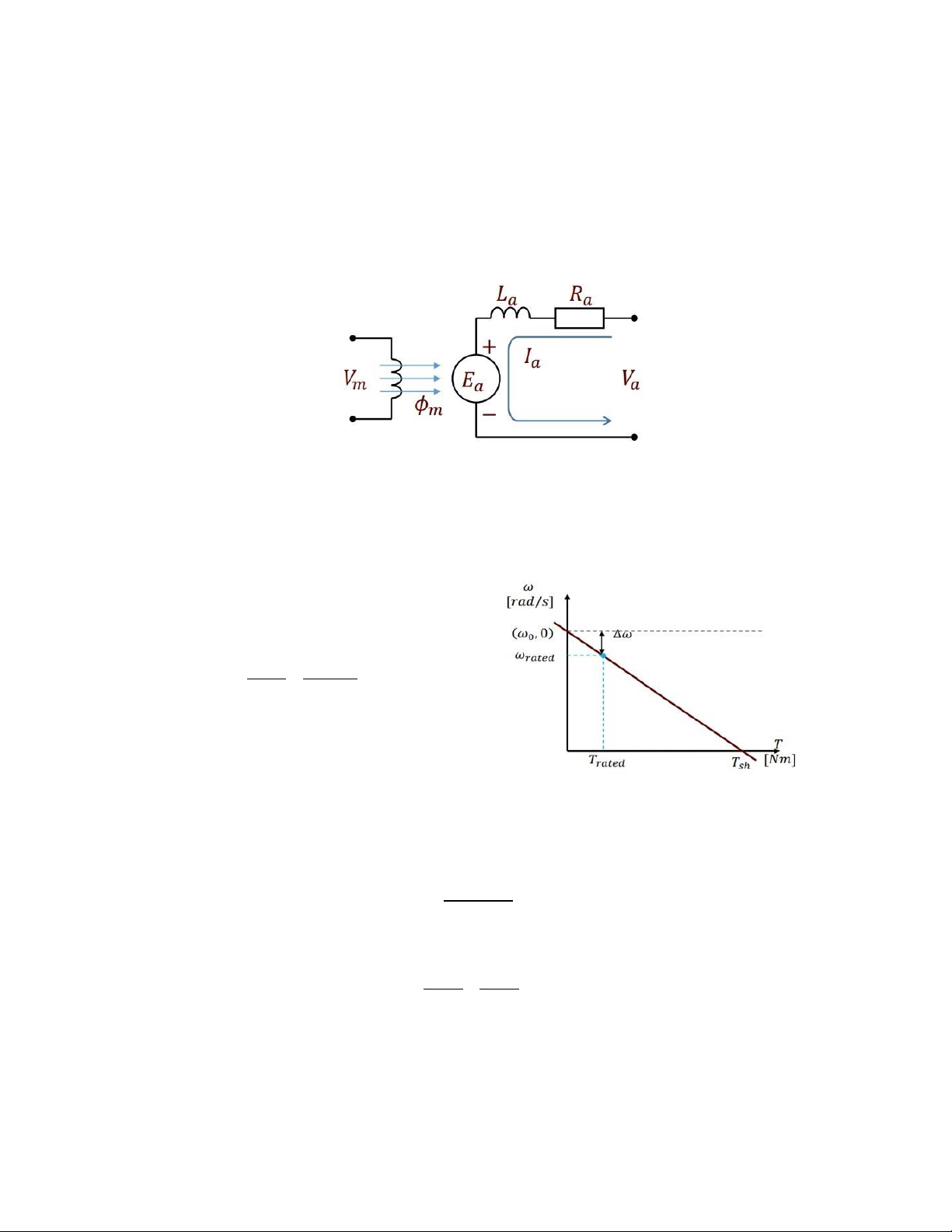
Hình 2. Đồ thị đặc tính cơ điện khi thêm điện
Hình 3. Sơ đồ mạch điện khi lắp thêm trở phần ứng. điện trở phần ứng •
Công thức tính toán các giá trị điện trở như sau:
Với cách chọn: I ≤ , I ≥ 1
(2 2.5 ). Irate 2 (1.1 1.3) . I rate
Tính toán giá trị điện trở: ω −ω (4) R = b d R =¿ bd ∨ ¿ ¿ s1 ω a 0−ωb ¿ ib∨¿ Ra¿ ω −ω (5) R = d f R =¿ fd ∨ ¿ ¿ s2 ω a 0−ωb
¿ ib∨¿ Ra ¿ ω −ω (6) R = f h R =¿ fh∨ ¿ ¿ s1 ω0−ωb a
¿ ib∨¿ Ra ¿ • Ưu/nhược điểm:
▪ Ưu điểm: Rẻ tiền, đơn giản, có thể tự động hóa.
▪ Nhược điểm: Cồng kềnh, tổn hao lớn.
❖ Khởi động bằng cách giảm điện áp phần ứng 4 •
Bằng việc tăng dần điện áp từ V →V a , min
a ,rate cùng sẽ làm giảm được
dòng/momen khởi động. trực quan có thể quan sát đồ thị trên hình 4.
Hình 5: DC chopper được sử dụng để thay
Hình 4. Đồ thị đặc tính cơ khi điều chỉnh đổi điện áp
tăng dần điện áp khi khởi động • Ưu/nhược điểm:
▪ Ưu điểm: Điều khiển vô cấp tốc độ, đường đặc tính cơ cứng, it tổn
hao và dòng ngắn mạch điều khiển được.
▪ Nhược điểm: Giá thành cao và yêu cầu phức tạp về mặt kĩ thuật. b. Vấn đề dừng hãm
Hãm động cơ (hãm điện) xảy ra khi công suất động cơ âm (Pe ∈0). Có 3 loại hãm
điện: Hãm tái sinh (Pe ∈0 , Pm >0, năng lượng trả ngược về nguồn), hãm ngược (E và
Va cùng chiều, tạo dòng đốt trên điện trở phần ứng), hãm động năng (ngắt nguồn,
năng lượng còn lại được đốt trên điện trở). Các loại hãm làm việc ở góc phần tư thứ 2 và thứ 4 (hình 6)
Hình 6. Sơ đồ các góc phần tư của DCM
c. Vấn đề điều khiển tốc độ ❖ Các chỉ tiêu kĩ thuật N
Dải điều chỉnh:D= max at T =T (7) N rate min ω −ω (8)
Sai lệch tốc độ: δω %= 0 rate × 100 % ω0 5
Tổn hao: δP=δ Pcu +δ PFe+ δ Psh+ δ Pvc (9)
❖ Các phương pháp điều khiển tốc độ
➢ Điều khiển thay đổi điện áp: Đây là phương pháp phổ biến để điều chỉnh
tốc độ ở dưới tốc độ cơ bản (hình 4). Đối với phương pháp này, ta thay đổi
điện áp và giữ từ thông ở gia trị định mức.
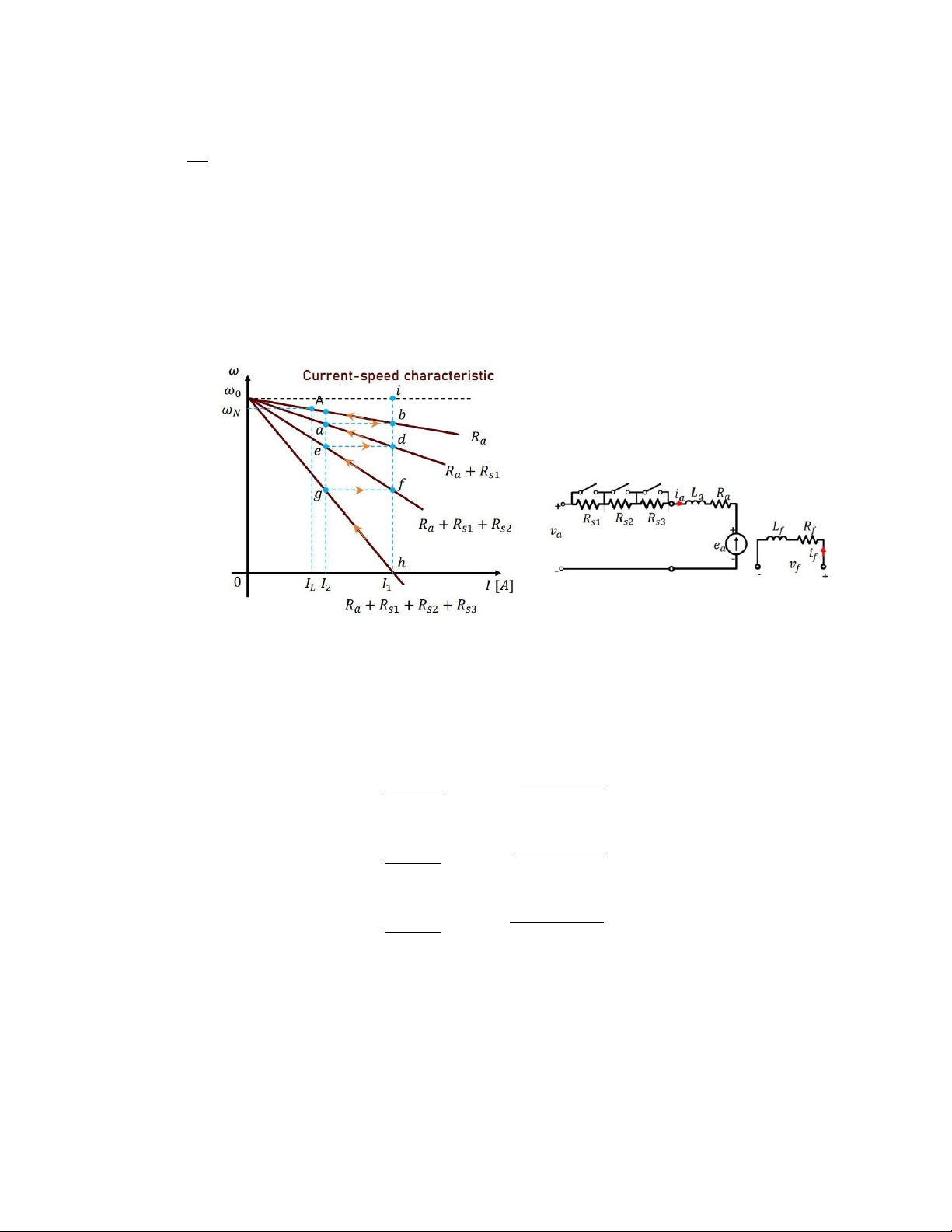
➢ Điều khiển giảm từ thông (filed – weakening control): phương pháp được
ứng dụng để điều khiển tốc độ trên tốc độ định mức, ϕ ↓→ω ↑ , β↓→ω ↑ m 0 rate (hình 7)
➢ Thêm điện trở phần ứng: Chỉ được dùng khi khởi động vì diễn ra trong thời gian ngắn.
Hình 7. Đồ thị đặc tính cơ khi điều khiển giảm từ thông. d. Vấn đề đảo chiều
Về cơ bản vấn đề đảo chiều là vấn đề thiết kế mạch để chiều dòng điện của động
cơ có thể lật ngược lại và xảy ra các quá trình hãm (hãm tái sinh, hãm ngược).
Trong phần hệ chopper-motor sẽ đề cập cụ thể hơn về quá trình đảo chiều. 1.2
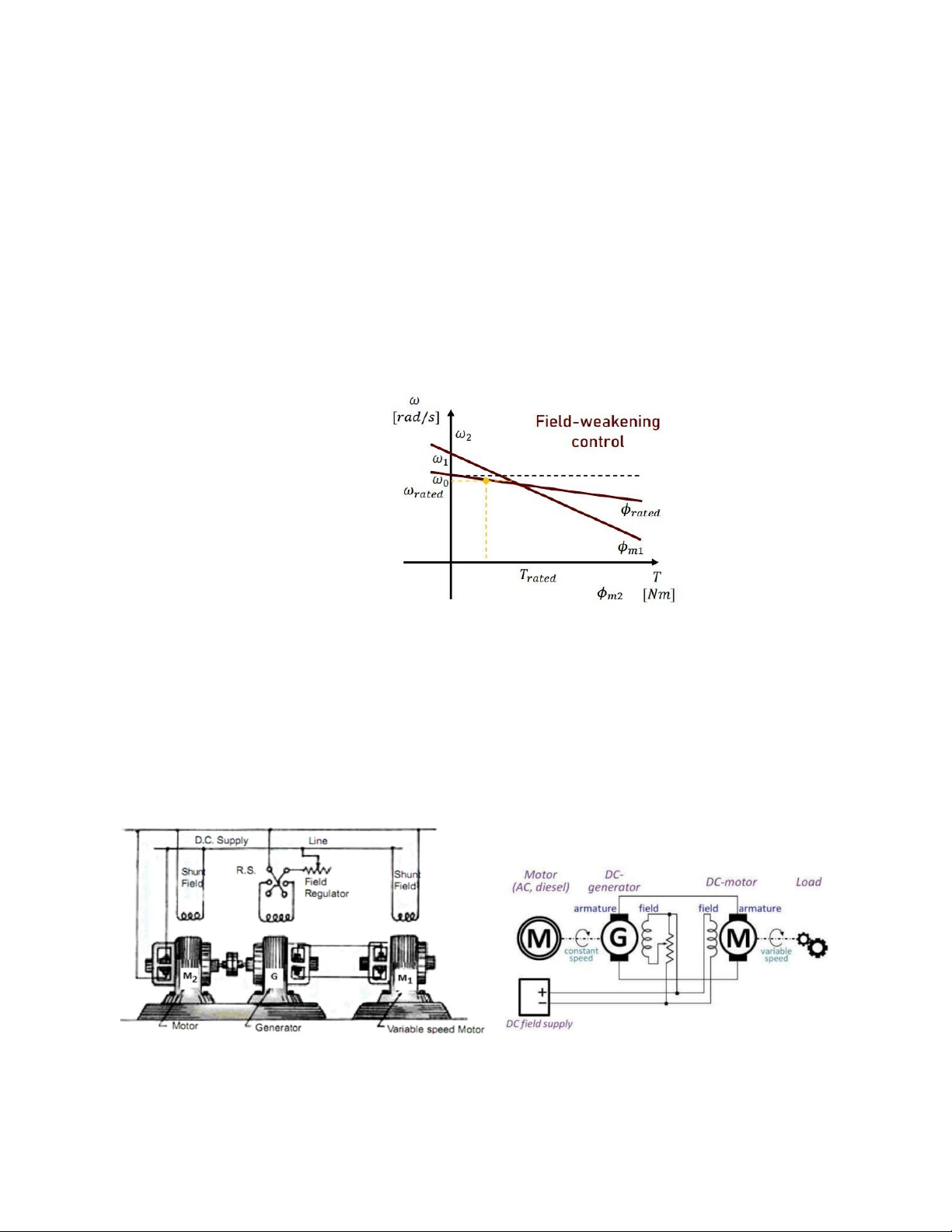
Các hệ truyền động cơ bản của DCM a. Hệ generator – motor
Hình 9. Hệ truyền động G-M
Hình 10. Sơ đồ đơn giản hóa của hệ G-M ➢ Nguyên lý: 6 •
Cấp nguồn cho kích từ của máy phát và động cơ, đồng thời chỉnh chiết áp
sao cho điện cáp kích từ của máy phát bằng 0 •
Quay động cơ M 2 lên tốc độ định mức •
Điểu chỉnh từ thông của máy phát (ϕg ¿ để cấp điện áp cho động cơ.
➢ Phương trình đặc tính cơ: k . ω R ω= g g × ϕ − total ×T k . ϕ g 2 m ( k . ϕm ) e (10)
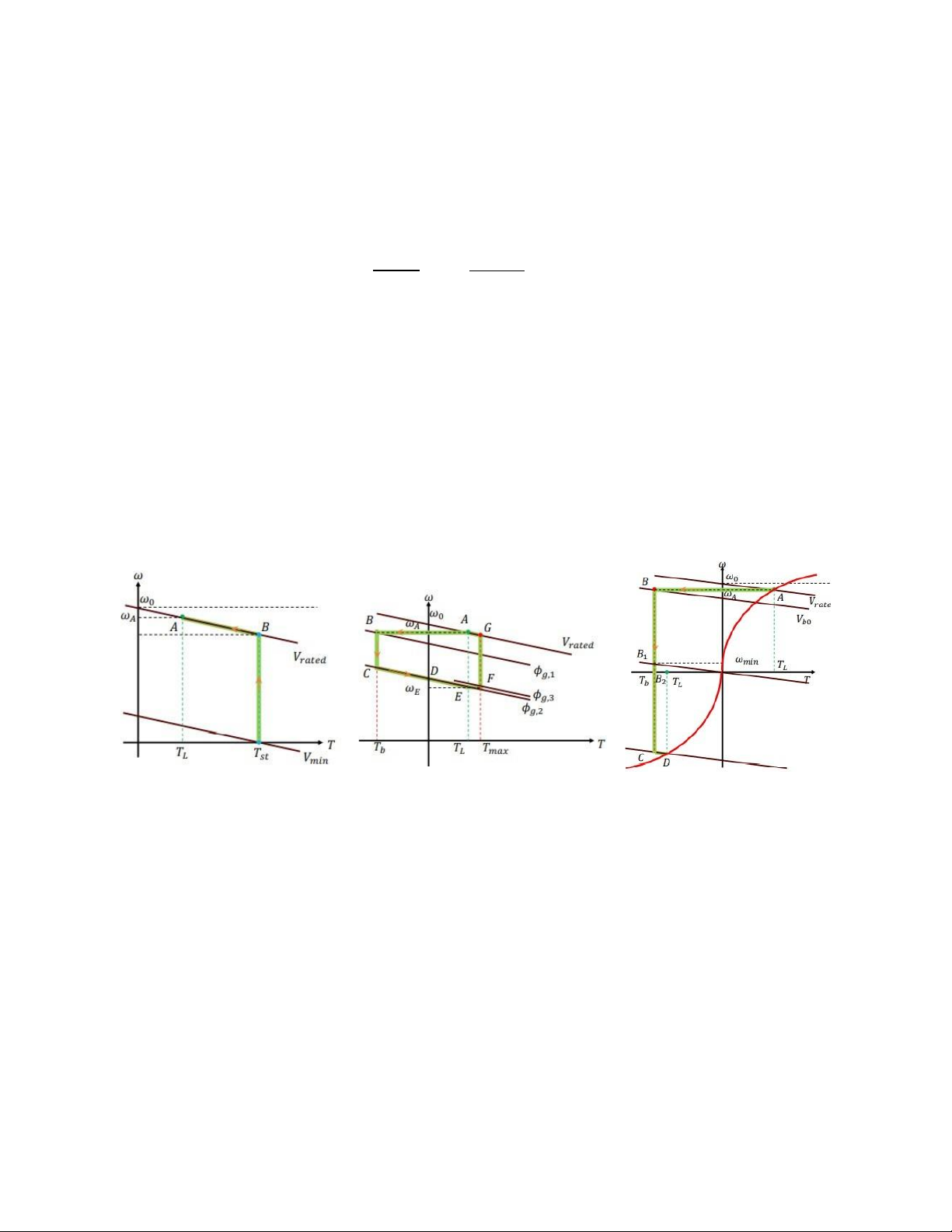
➢ Khởi động, dừng hãm, đảo chiều •
Khởi động: Bằng các điều khiển điện từ thông từ giá trị từ giá trị ϕmin , thêm
vào đó là điều khiển vòng kín bám momen khởi động sẽ đạt được như hình 11. •
Điều khiển tốc độ, dừng hãm: Cũng bằng phương pháp điều khiển bám
momen ta sẽ điều khiển động cơ đi theo đường bao như trên hình 12. •
Đảo chiều: Như trên hình 13, sẽ có 2 quá trình hãm là hãm tái sinh (khi
Va >0 vàω>0), kế sau đó là quá trình hãm ngược (khi Va ∈0 vàω>0 ¿, cuối
cùng là quá trình đảo chiều hoàn toàn (V a ∈0 vàω∈0) Hình 11. Khởi động bám
Hình 12. Điều chỉnh tốc độ
Hình 13. Quá trình đảo chiều momen ➢ Ưu/nhược điểm
▪ Ưu điểm: Có thể làm việc ở cả 4 góc phần tư, linh hoạt trong việc điều
chỉnh tốc độ và đảo chiều, đơn giản, sử dụng nhiều trong các bộ truyền
động cần sự linh hoạt cao nhưng không có nguồn cấp chẳng rhanj như các
máy móc ngoài công trường.
▪ Nhược điểm: Giá thành đắt đỏ, cồng kềnh, tổn hao lớn. b. Hệ thyristor – motor
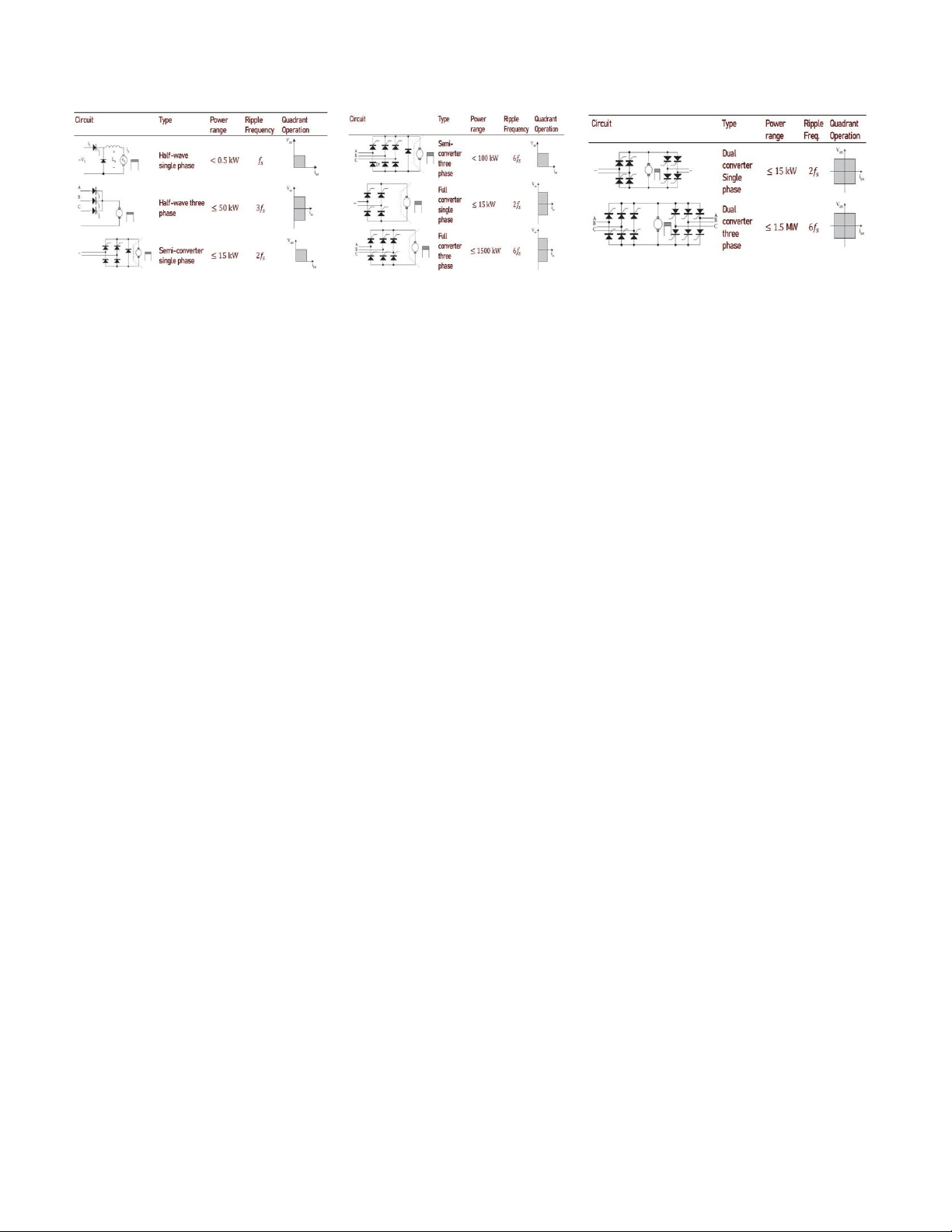
Có rất nhiều cấu trúc khác nhau của hệ T – D, phụ thuộc vào dải công suất đang sử
dụng sử dụng (hình 14). 7
Hình 14. Các dạng thyristor – motor c. Hệ chopper – motor 8