Đề cương trắc địa ảnh - Các giai đoạn phát triển và ứng dụng | Trắc địa đại cương | Trường Đại học Khoa học Tự nhiên, Đại học Quốc gia Hà Nội
Các giai đoạn phát triển của Trắc địa ảnh: Đặc điểm từng giai đoạn, sản phẩm từng giai đoạn Các giai đoạn phát triển của Trắc địa ảnh: 4 giai đoạn Giai đoạn 1: Bàn đạc ảnh Giai đoạn này chưa có các thiết bị bay chụp hàng không Sử dụng phương pháp hình học: giao hội thuận với các hướng được đo trên ảnh để xác định tọa độ của địa vật (xác định thông số trong không gian 2 chiều) Đây là giai đoạn phát triển của bàn đạc ảnh (hay là đồ giải ảnh). Tài liệu được sưu tầm và soạn thảo dưới dạng file PDF để gửi tới các bạn cùng tham khảo, ôn tập đầy đủ kiến thức, chuẩn bị cho các buổi học thật tốt. Mời bạn đọc đón xem!
Môn: Trắc địa đại cương (HUS) 12 tài liệu
Trường: Trường Đại học Khoa học tự nhiên, Đại học Quốc gia Hà Nội 1.1 K tài liệu
Tác giả:
Preview text:
CHƯƠNG 1. CƠ SỞ KHOA HỌC CỦA TRẮC ĐỊA ẢNH
1. Các giai đoạn phát triển của Trắc địa ảnh: Đặc điểm từng giai đoạn, sản
phẩm từng giai đoạn
Các giai đoạn phát triển của Trắc địa ảnh: 4 giai đoạn
Giai đoạn 1: Bàn đạc ảnh
Giai đoạn này chưa có các thiết bị bay chụp hàng không
Sử dụng phương pháp hình học:
với các hướng được đo trên giao hội thuận
ảnh để xác định tọa độ của địa vật (xác định thông số trong không gian 2 chiều)
Đây là giai đoạn phát triển của bàn đạc ảnh (hay là đồ giải ảnh) Nhược điểm:
Độ chính xác thấp Khó khăn
nhận biết các điểm ảnh cùng tên trong việc (cùng chỉ
một địa vật trên các tấm đơn được chụp từ các trạm khác nhau.
Giai đoạn 2: Đo ảnh tương tự (hay đo ảnh toàn năng quang cơ) (dạng giấy)
Bắt đầu sử dụng phương pháp đo lập thể (năm 1901)
Sử dụng các thiết bị: máy cơ học, quang học hay quang cơ để khôi phục vị
trí của cặp ảnh có chồng phủ trong không gian 3 chiều.
Sản phẩm chính: bản đồ địa hình
Tư liệu đầu vào là ảnh quang học được dựng và đo vẽ trên các máy toàn
năng cồng kềnh => con người phải thực hiện toàn bộ các thao tác đo
Sản phẩm đầu ra: vẽ trực tiếp trên bản vẽ tương tự
Nhược điểm: máy toàn năng cơ học cồng kềnh, lạc hậu
Giai đoạn 3: Đo ảnh giải tích
Máy tính đã thay thế một số bộ phận cơ học và quang học
Các máy đo là một thiết bị tương tự hay số hỗn hợp (máy đo tọa độ ảnh, máy tính và phần mềm) Xuất hiện khái niệm mới nhiều
: tam giác ảnh không gian giải tích, máy
toàn năng giải tích, máy chiếu ảnh trực giao
Sản phẩm: bản đồ địa hình, bản đồ số hay mô hình số độ cao
Giai đoạn 4: Đo ảnh số (trắc địa ảnh số hay công nghệ ảnh số) (dạng số trên máy tính)
Giải quyết được vấn đề tự động hóa trong quá trình đo vẽ
Các thông tin để nhận dạng các điểm cùng tên như: thông tin bức xạ, xử lý
và nhận dạng tự động (bằng kỹ thuật khớp ảnh tự động) trên tư liệu ảnh số. Ảnh số được nhiều cách: quét từ
từ phim, ảnh tương tự hay ảnh chụp bằng
các máy ảnh kỹ thuật số
Nhiều bài toán được thực hiện tự động bằng máy tính: mô hình số độ cao, ảnh trực giao.
Ưu điểm: ở dạng số nên dễ dàng lưu trữ và bảo quản trên máy tính
Ứng dụng: viễn thám, hệ thống thông tin địa lý GIS.
2. Các loại tư liệu ảnh, ứng dụng của từng tư liệu ảnh trong lĩnh vực gì
Các loại ảnh thường sử dụng trong công nghệ ảnh số là ảnh hàng không,
ảnh vệ tinh ảnh mặt đất. Ứng dụng: Ảnh mặt đất:
Độ cao bay chụp: ảnh mặt đất được chụp từ máy ảnh đặt trên mặt đất hoặc
gần mặt đất với khoảng cách bay chụp tương đối ngắn, từ vài mét đến 1km
Sản phẩm đầu ra: Các bản vẽ, mô hình 3D của các đối tượng (tòa nhà, công
trình kỹ thuật, cảnh tai nạn, khảo cổ học,...) hay các đám mây điểm Ứng dụng:
Đo vẽ bản đồ tỷ lệ lớn trong công trình, dự án như: đo vẽ địa hình,
tính toán khối lượng đào bới trong khai thác mỏ lộ thiên
Khôi phục lại các công trình kiến trúc, khảo cổ
Một nhánh phát triển của ảnh mặt đất trong giai đoạn hiện nay là ảnh chụp cự ly gần (close-range) Ảnh hàng không
Độ cao bay chụp: 1km - 7km và trục của máy gần như thẳng đứng
Được chụp từ máy ảnh đặt trên các vật thể bay như máy bay, khinh khí cầu. Ứng dụng:
Đo vẽ bản đồ gần như mọi tỷ lệ: từ 1:1000 và nhỏ hơn
Là loại tư liệu chủ yếu dùng cho công nghệ ảnh số trong giai đoạn hiện nay Ảnh vệ tinh
Độ cao bay chụp: khoảng 300 - 20.000 km.
Ảnh vệ tinh được chụp bằng bộ cảm sensor đặt trên các vệ tinh nhân tạo bay theo quỹ đạo. Ứng dụng:
Chỉnh/thành lập bản đồ ở tỷ lệ nhỏ và vừa
Đo vẽ lập thể để nhận biết thông tin về độ cao của địa vật nhờ áp
dụng phương pháp đo ảnh số
Chú ý: ở một số tài liệu, người ta có thể dùng thuật ngữ “ảnh hàng không”
để ám chỉ cả ảnh vệ tinh
3. Một số yếu tố kỹ thuật trong chụp ảnh hàng không (Đảm bảo tính chính xác và tính kinh tế)
a. Độ cao bay chụp ảnh
Khái niệm: Độ cao bay chụp là khoảng cách theo đường dây dọi kể từ tâm
quang học của hệ thống kính vật máy chụp ảnh (gọi tắt là tâm máy ảnh) đến
một mặt phẳng nhất định
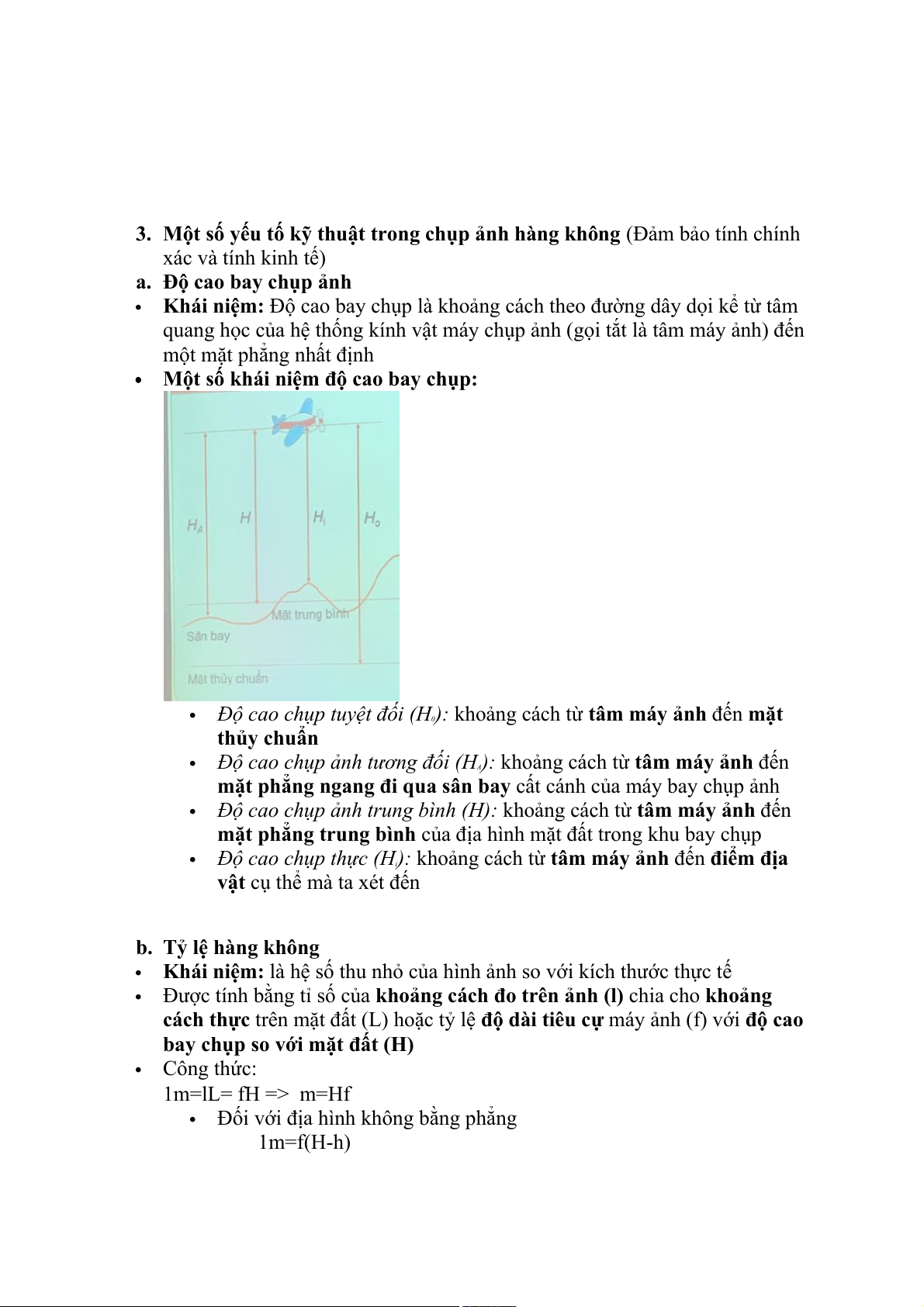
Một số khái niệm độ cao bay chụp:
Độ cao chụp tuyệt đối (H ): khoảng cách từ tâm máy ảnh đến mặt 0 thủy chuẩn
Độ cao chụp ảnh tương đối (H
khoảng cách từ tâm máy ảnh đến A):
mặt phẳng ngang đi qua sân bay cất cánh của máy bay chụp ảnh
Độ cao chụp ảnh trung bình (H): khoảng cách từ đến tâm máy ảnh
mặt phẳng trung bình của địa hình mặt đất trong khu bay chụp
Độ cao chụp thực (H khoảng cách từ tâm máy ảnh đến điểm địa i):
vật cụ thể mà ta xét đến b. Tỷ lệ hàng không
Khái niệm: là hệ số thu nhỏ của hình ảnh so với kích thước thực tế
Được tính bằng tỉ số của khoảng cách đo trên ảnh (l) chia cho khoảng
cách thực trên mặt đất (L) hoặc tỷ lệ độ dài tiêu cự máy ảnh (f) với độ cao
bay chụp so với mặt đất (H) Công thức: 1m=lL= fH => m=Hf
Đối với địa hình không bằng phẳng 1m=f(H-h)
h: độ cao từng điểm trên ảnh (địa vật so với mặt nước biển)
H: độ cao bay chụp tính từ mặt nước biển
Quan hệ giữa tỷ lệ ảnh và tỷ lệ bản đồ m: mẫu số tỷ lệ ảnh
M: mẫu số tỷ lệ bản đồ 1m=lL=fH 1M=l0L
k: hệ số phóng đại của bản đồ so với ảnh: k=l0l=l0/Ll/L=1/M1/m=mM Thường lấy k= 3-7 lần
Phân loại một số tỷ lệ ảnh hàng không (đọc thêm)
Ảnh hàng không tỷ lệ lớn: Ảnh hàng không có tỷ lệ 1:15.000 hoặc lớn
hơn được phân loại là tỷ lệ lớn. Phạm vi khu vực được chụp có diện
tích nhỏ, các đối tượng được chi tiết hơn, kích thước lớn hơn
Ảnh hàng không tỷ lệ trung bình: Ảnh hàng không có tỷ lệ trong phạm
vi 1:15000 - 1:50000 được phân loại là tỷ lệ trung bình.
Ảnh hàng không tỷ lệ nhỏ: Ảnh có tỷ lệ nhỏ hơn 1:50000 được coi là
tỷ lệ nhỏ. Mức độ chỉ tiết của các đối tượng kém hơn nhưng vùng phủ
chụp lại lớn hơn, thường để nghiên cứu ở phạm vi lãnh thổ lớn (ví dụ như quốc gia)
c. Độ phủ của ảnh (p và q)
Ứng dụng của trắc địa thường sử dụng các tấm ảnh có độ chồng phủ vì có
thể xác định các yếu tố gây biến dạng hình học tốt hơn nhiều so với các
tấm ảnh đơn hay các tấm ảnh không chồng phủ
Miền chồng phủ giữa các tấm ảnh sẽ cho phép quan sát lập thể và từ đó
chiết xuất thông tin về độ cao
Độ chồng phủ dọc (p):
Phần chồng phủ của hai tấm ảnh kề cạnh nhau trên một tuyến bay hay một dải bay (strip)
Được tính dọc theo hướng bay chụp p 60%
Dùng để liên kết các tấm ảnh trong cùng một dải bay và quan sát đo vẽ lập thể.
Độ chồng phủ ngang (q):
Phần chồng phủ của hai tấm ảnh cạnh nhau trên hai tuyến bay kề nhau 20% q 30%
Chú ý: chỉ dùng để liên kết các dải bay với nhau mà không được sử
dụng để quan sát lập thể
CHƯƠNG 2: ẢNH SỐ VÀ VẤN ĐỀ XỬ LÝ ẢNH SỐ 1.1 Khái niệm:
Ảnh số là một mảng 2 chiều của các phần tử ảnh có kích thước đều nhau
được gọi là điểm ảnh (pixel).
Mỗi pixel được xác định bởi 3 thông số: toạ độ hàng, toạ độ cột và độ xám.
Độ xám được mã hoá theo đơn vị thông tin là bít. Số bậc độ xám g được
tính từ số bít L sử dụng để lưu trữ 1 pixel theo công thức: g = 2L
Ảnh màu thường được tổ hợp từ 3 kênh: R, G, B với mỗi kênh được mã
hoá theo độ xám khác nhau.
1.2 Các loại độ phân giải của ảnh số.
Độ phân giải là khả năng ghi nhận hay nhận biết các chi tiết của đối
tượng trên ảnh với sự phân biệt rõ ràng.
Độ phân giải hình học (độ phân giải) là kích thước của một pixel
trong ảnh số. Độ phân giải thường được tính bằng m hoặc dpi (dots
per inch). Đơn vị dpi (hay ppi - pixels per inch) biểu diễn số điểm ảnh
có trong 1 inch (2.54cm) chiều dài. Mối quan hệ giữa 2 đơn vị đo
được biểu diễn bằng công thức:
Độ phân giải độ xám là chênh lệch độ xám nhỏ nhất có thể hiển thị
được trên ảnh số. Độ phân giải độ xám được xác định bởi số độ xám
(hay số bít) của một pixel.
Độ phân giải phổ
ảnh vệ tinh hay ảnh hàng thường áp dụng cho
không màu. Nó xác định khoảng bước sóng nhỏ nhất có thể ghi
nhận được trên ảnh. ( ảnh hàng không màu thì độ phân giải phổ xác
định sự phân biệt về màu sắc của các đối tượng trên ảnh).
2. Biểu đồ thống kê độ xám của ảnh số
Thể hiện mật độ phân bố độ xám của ảnh
Trục hoành biểu thị giá trị độ xám trục tung ,
biểu thị số lượng pixel có
cùng giá trị độ xám (tính bằng % so với tổng số pixel có trên ảnh)
Độ tương phản c tính theo độ xám lớn nhất gmax và độ xám nhỏ nhất trên ảnh:
c = gmax - g gmax+gmin min
Việc thay biểu đồ thống kê độ xám, có thể làm nâng cao chất lượng hình
ảnh như lọc nhiễu, tăng độ tương phản,...
3. Cấu trúc hình tháp của ảnh số 3.1 Khái niệm:
Là kỹ thuật tạo ra các lớp ảnh phụ có độ phân giải thấp hơn ảnh gốc để
sử dụng khi hiển thị ảnh ở các tỷ lệ nhỏ hơn tỷ lệ gốc. 3.2 Vai trò:
Cấu trúc hình tháp của ảnh giúp giảm thiểu bộ nhớ máy tính và đặc biệt
quan trọng trong việc tăng tốc độ thu phóng ảnh số ở các tỷ lệ khác nhau.
Sử dụng trong 1 số công việc như giảm thiểu miền tìm kiếm trong kỹ thuật
khớp ảnh tự động hay tự động nhận dạng ranh giới của đối tượng trên ảnh số.
Số lượng các lớp ảnh phụ cũng như độ phân giải của chúng được xác định từ
kích cỡ và độ phân giải của ảnh gốc, nhu cầu sử dụng và khả năng của phần
mềm tạo cấu trúc hình tháp. 3.3 Phân loại:
Có 2 kiểu hình tháp là hình tháp đơn và hình tháp đầy đủ
Hình tháp đơn: ảnh gốc ít hơn 8 triệu pixel thì chỉ tạo 1 lớp ảnh phụ
duy nhất có độ phân giải bằng ½ độ phân giải ảnh gốc (ít hơn 2 triệu
pixel), nhiều hơn 8 triệu pixel tạo 1 lớp ảnh phụ có độ phân giải
bằng ½, ⅓,1/4 ,..(khoảng 2 triệu pixel)
Hình tháp đầy đủ: tạo ra các lớp ảnh phụ có độ phân giải bằng ½, ¼.
⅛, 1/16,...đến lớp cuối cùng có kích thước nhỏ hơn 30x30 pixels
Có 3 phương pháp cơ bản để tạo cấu trúc hình tháp: lấy mẫu xen kẽ, lấy
mẫu trung bình, lấy mẫu Gaussian. Lấy mẫu xen kẽ
phương pháp nhanh nhất và đ là ơn giản nhất.
Nếu lớp ảnh phụ có độ phân giải bằng ½ ảnh gốc thì cứ cách 1 pixel
trên ảnh gốc lại lấy 1 pixel rồi đưa vào ảnh phụ.
Lấy mẫu trung bình cho chất lượng cao hơn so với lấy mẫu xen kẽ
nhưng tốc độ tạo pyramid chậm hơn. Giá trị độ xám của lớp ảnh phụ
được lấy trung bình từ giá trị độ xám của tất cả các pixel trên ảnh gốc
nằm bên trong pixel của ảnh phụ
Lấy mẫu Gaussian dựa trên phương pháp lấy mẫu xen kẽ nhưng có
điểm khác biệt là trước khi tạo một lớp ảnh phụ nào đó thì lớp ảnh sử
dụng để tạo nó được lọc bởi bộ lọc Gauss ( giảm bớt nhiễu và các chi tiết nhỏ trên ảnh)
→ Lấy mẫu xen kẽ nhanh nhất, lấy mẫu trung bình, lấy mẫu Gaussian
chậm nhất. Chất lượng lớp ảnh phụ tốt nhất là Gaussian, lấy mẫu xen kẽ kém
nhất. Trong đo ảnh số, lấy mẫu Gaussian nên được lựa chọn.
CHƯƠNG 3: PHƯƠNG PHÁP ĐO ẢNH SỐ
1. Các hệ tọa độ dùng trong đo ảnh số: với mỗi hệ tọa độ cần hiểu khái niệm,
cách vẽ, đặc điểm (nếu có)
1.1. Hệ tọa độ điểm ảnh( hệ tọa độ ảnh số) xác lập vị trí hàng - cột của pixel trong trong ảnh số
Hệ tọa độ có điểm gốc ở góc bên trên trái ảnh. số cột ( tọa độ c) tăng dần từ
trái sang phải, số hàng( tọa độ r) tăng dần từ trên xuống dưới
(r,c) là tọa độ nguyên dương
1.2. Hệ tọa độ mặt phẳng ảnh
Khái niệm: hệ tọa độ mặt phẳng ảnh là hệ tọa độ 2 chiều có điểm gốc nằm ở giữa tấm ảnh
Đặc điểm: trục x nằm ngang và trục y hướng lên trên
Cách xác định điểm gốc của hệ tọa độ mặt phẳng ảnh
Đối với ảnh có mấu khung tọa độ: điểm gốc tọa độ là giao điểm của 2
đường thẳng nối các mấu khung tọa độ ở mép tấm ảnh
Đối với ảnh không có mấu khung tọa độ: điểm gốc tọa độ được lấy là
điểm giữa tấm ảnh (xác định theo số lượng hàng và cột các pixel)
1.3. Hệ tọa độ không gian ảnh Kn
Đối với mô hình phụ thuộc: hệ tọa độ trùng với hệ tọa độ không gian của ảnh trái Đặc điểm
Điểm gốc tọa độ trùng với tâm chiếu hình S, trục x,y song song với
trục x,y tương ứng của hệ tọa độ mặt phẳng ảnh, trục z trùng với trục
quang chính của máy ảnh và hướng lên trên
Hình chiếu của điểm gốc tọa độ lên mặt phẳng ảnh là điểm chính ảnh O
Độ cao z trong hệ tọa độ không gian ảnh bằng -f với f là tiêu cự của máy ảnh
1.4. Hệ tọa độ không gian đo ảnh
Khái niệm: hệ tọa độ không gian đo ảnh (hệ tọa độ mô hình) là 1 hệ tọa độ
giả định, được chọn gốc và cách lấy trục tọa độ tùy ý
Tác dụng: dùng để định vị mô hình lập thể khi định hướng tương đối Đặc điểm:
Hệ tọa độ mô hình thường có điểm gốc trùng với tâm chụp trái, các
trục tọa độ tùy theo từng mô hình lập thể (độc lập hay phụ thuộc).
Đối với mô hình lập thể: điểm gốc của hệ tọa độ mô hình trùng với
tâm chiếu hình của ảnh trái, trục x dọc theo đường đấy hình chiếu và
hướng về ảnh phải, trục y song song với đường dọc chính của ản trái.
Đối với mô hình phụ thuộc, hệ tọa độ mô hình trùng với hệ tọa độ không gian ảnh trái
1.5. Hệ tọa độ mặt đất
Khái niệm: là hệ tọa độ quốc gia, là hệ tọa độ mà sản phẩm của công nghệ
ảnh số( bản đồ, mô hình độ cao, ảnh trục giao,..) cần thành lập trong đó
Việt Nam sử dụng hệ VN-2000
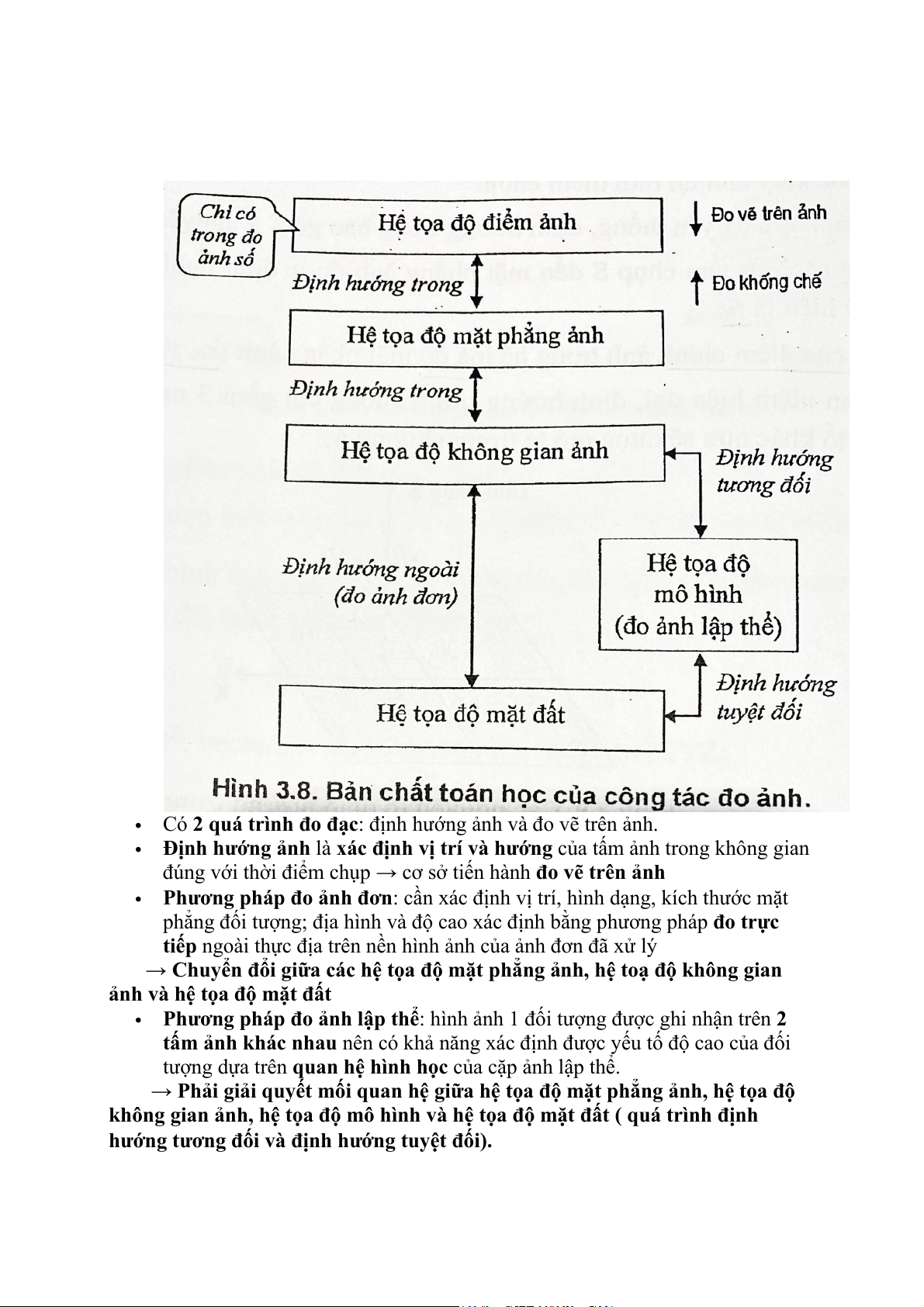
2. Bản chất toán học của công tác đo ảnh
Các đối tượng trên ảnh đo được xác định trong hệ toạ độ mặt phẳng ảnh
(ảnh số thì xác định hệ tọa độ điểm ảnh).
Để toạ độ chính xác các đối tượng trong hệ toạ độ mặt đất, cần chuyển đổi
giữa các hệ tọa độ: hệ toạ độ mặt phẳng ảnh hoặc hệ toạ độ điểm ảnh
sang hệ tọa độ mặt đất và ngược lại.
Có 2 quá trình đo đạc: định hướng ảnh và đo vẽ trên ảnh.
Định hướng ảnh là xác định vị trí và hướng của tấm ảnh trong không gian
đúng với thời điểm chụp → cơ sở tiến hành đo vẽ trên ảnh
Phương pháp đo ảnh đơn: cần xác định vị trí, hình dạng, kích thước mặt
phẳng đối tượng; địa hình và độ cao xác định bằng phương pháp đo trực
tiếp ngoài thực địa trên nền hình ảnh của ảnh đơn đã xử lý
→ Chuyển đổi giữa các hệ tọa độ mặt phẳng ảnh, hệ toạ độ không gian
ảnh và hệ tọa độ mặt đất
Phương pháp đo ảnh lập thể: hình ảnh 1 đối tượng được ghi nhận trên 2
tấm ảnh khác nhau nên có khả năng xác định được yếu tố độ cao của đối
tượng dựa trên quan hệ hình học của cặp ảnh lập thể.
→ Phải giải quyết mối quan hệ giữa hệ tọa độ mặt phẳng ảnh, hệ tọa độ
không gian ảnh, hệ tọa độ mô hình và hệ tọa độ mặt đất ( quá trình định
hướng tương đối và định hướng tuyệt đối).
3. Các nhân tố định hướng của 1 tấm ảnh
Khái niệm:Các nguyên tố định hướng ảnh là các đại lượng xác định vị trí và
hướng của tấm ảnh trong gian tại thời điểm chụp. Được chia ra thành 2 loại:
định hướng trong và định hướng ngoài
a. Các nguyên tố định hướng trong:
Các nguyên tố định hướng trong là các đại lượng xác định vij trí không gian
của tấm ảnh so vs tâm chụp của máy tại thời điểm chụp
Định hướng trong gồm 3 nguyên tố:
Khoảng cách từ tâm chụp S đến mặt phẳng ảnh được định nghĩa là
tiêu cự của máy chụp ảnh
Tọa độ của điểm chính ảnh trong hệ tọa độ mặt phẳng ảnh(Xo, Yo)
Tọa độ các điểm mấu khung trong hệ tọa độ điểm ảnh
b. Các nguyên tố định hướng ngoài
Khái niệm: các nhân tố định hướng ngoài là các đại lượng xác định vị trí và
hướng của tấm ảnh so với mặt đất tại thời điểm chụp
Một tấm ảnh đơn có 6 nguyên tố định hướng ngoài:
3 tọa độ không gian của tâm chụp S trong hệ tọa độ mặt đất (Xs, Ys,Zs)
3 góc định hướng của hệ tọa độ không gian ảnh trong hệ tọa độ mặt
đất, hay nói cách khác là hướng của máy ảnh trong không gian. các
góc định hướng có thể được xác định theo một trong 2 nhóm sau Nhóm 1: t,a,k
t: góc kẹp giữa đường hướng chụp VV với trục OX của hệ tọa độ mặt đất
a : góc nghiêng của ảnh, là góc kẹp So và đường dây dọi
k: góc kẹp giữa đường dọc chính vv trên mặt phẳng ảnh với trục oy + Nhóm 2: φ, ω,K
φ: góc nghiêng dọc của ảnh, là góc kẹp giữa hình chiếu của So trên mặt OYZ và trục Z
ω: góc nghiêng ngang của ảnh, là góc kẹp giữa So và hình chiếu của nó trên OYZ
K: góc xoay của ảnh, là góc kẹp giữa đường dọc chính vv trên
mặt phẳng ảnh với trục Oy
4. Mối quan hệ giữa tọa độ điểm địa vật và tọa độ điểm ảnh Bài toán thuận:
Mục tiêu: xác định tọa độ của địa vật khi biết tọa độ điểm ảnh và các
yếu tố định hướng ngoài X=x.Hfk: Y= y. Hfk Bài toán nghịch
Mục tiêu : xác định tọa độ điểm ảnh khi biết tọa độ địa vật và các yếu tố định hướng ảnh x=X.FkH , y=Y.FkH Giải thích kí hiệu
Tọa độ địa vật là (X,Y)
Tọa địa điểm ảnh(x,y) H: độ cao bay chụp Fk: tiêu cự
CHƯƠNG 4: ĐO ẢNH LẬP THỂ SỐ
4.1. Quy trình công nghệ đo vẽ thành lập bản đồ bằng công nghệ ảnh số : giải
thích được quy trình trật tự logic các bước
1, Thiết kế kỹ thuật
Thiết kế kỹ thuật bay chụp là tài liệu qua trọng để tiến hành bay chụp
Thiết kế kỹ thuật bao gồm :
+ Nghiên cứu điều kiện tự nhiên, kinh tế và yêu cầu đặt hàng
+ Xác định phương tiện kỹ thuật đo vẽ ảnh và phương tiện hiện có + Phân chia khu chụp
+ Chọn tỷ lệ chụp ảnh, máy chụp ảnh và độ phủ ảnh
+ Tính toán kích thước khu chụp, cạnh đáy chụp ảnh, khoảng cách đường bay
+ Xác định số lượng ảnh, thời gian bay + Lập bản đồ bay chụp
+ Xác định chi phí bay chụp
2, Đặt mốc khống chế (nếu có)
Việc đặt mốc khống chế được thực hiện nhằm phục vụ cho việc đo nối khống chế ngoại nghiệp
Những vùng thực địa thiếu điểm rõ nét như vùng rừng núi, sa mạc, …. hay
khi cần thành lập bản đồ tỉ lệ lớn cần phải đặt dấu mốc cho các điểm khống chế ảnh. 3, Bay chụp ảnh
Có ý nghĩa lớn trong việc đảm bảo độ chính xác và tính kinh tế Cần chú ý + Độ cao bay chụp + Độ chồng phủ
+ Các mục tiêu như các địa vật rõ rệt trên mặt đất (ngã ba đường, cột điện,....)
4, Hiểu chỉnh hình học, tăng cường chất lượng ảnh
Chụp ảnh có thể theo 2 hình thức
+ Chụp ảnh tương tự bằng phim + Chụp ảnh số
Chụp ảnh phim cần quét phim để có dữ liệu đầu vào ở dạng số
Ảnh chụp ở dạng số hoặc phim được quét cần hiệu chỉnh hình học và tăng
cường chất lượng để tăng độ chính xác phục vụ quá trình đo ảnh và giải đoán điều vẽ ảnh
5, Đo nối khống chế ngoại nghiệp
Xác định tọa độ, độ cao của các điểm khống chế ảnh ngoại nghiệp phục vụ
cho công tác tăng dày khống chế ảnh trong phòng
Các điểm đóng vai trò định hướng lưới tam giác ảnh và mô hình trong hệ tọa độ trắc địa 6, Tạo project
Sắp xếp các tấm ảnh theo từng dải bay đúng như khi bay chụp và đặt các
thông số của khu đo như hệ tọa độ, tỷ lệ đo vẽ, ….
Bước đầu cho quá trình xử lý nội nghiệp
7, Định hướng ảnh, tăng dày khống chế, bình sai lưới tam giác ảnh không gian
Định hướng ảnh : xác định tham số để khôi phục vị trí và hướng ảnh khi chụp
+ Định hướng trong : nhập giá trị tiêu cự, tọa độ điểm chính ảnh, tọa độ các
điểm mấu khung để tính các tham số chuyển hệ tọa độ điểm ảnh và hệ tọa độ mặt phẳng
+ Định hướng ngoài : khôi phục vị trí và hướng chụp của máy ảnh ở thời
điểm bay chụp qua yếu tố định hướng ngoài ( 6 yếu tố ảnh đơn, 12 yếu tố ảnh lập thể )
+ Các yếu tố này được xác định trên cơ sở đo đạc, tính toán các điểm khống chế trên mặt đất
Tăng dày khống chế ảnh :
+ Giảm chi phí và thời gian đo khống chế ngoại nghiệp
+ Thay thế 1 số điểm khống chế mặt đất đo đạc ngoài thực địa bằng điểm
khống chế đo đạc trong phòng
Bình sai lưới tam giác ảnh không gian
+ Để xây dựng lưới khống chế ảnh tăng dày, hay được sử dụng trong thực tế
+ Nhằm mục đích xác định tọa độ trắc địa của các điểm khống chế tăng dày
8, Thành lập mô hình số độ cao
Khả năng xây dựng mô hình số độ cao là đặc điểm nổi trội của công nghệ số ảnh
Được xây dựng theo phương pháp tự động hoặc kết hợp đo bổ sung các
điểm đặc trưng địa hình để tăng độ chính xác của mô hình
Sử dụng trong quá trình nội suy đường bình độ và thành lập bình độ ảnh trực giao
9, Thành lập bình độ ảnh trực giao
Là tấm ảnh được tạo bởi sự liên kết các ảnh trực giao thành 1 tấm ảnh duy
nhất tạo điều kiện để vecto hóa bản đồ
10, Đoán đọc, điều vẽ ảnh
Nhằm xác định tính chất, nội dung của các đối tượng dựa trên các chuẩn giải đoán
11, Số hóa nội dung bản đồ
Tùy vào từng bản đồ mà nội dung số hóa sẽ khác nhau
12, Đối chiếu thực địa , đo vẽ bổ sung
Để kiểm chứng lại các mẫu giải đoán và điều chỉnh những đối tượng mới
xuất hiện, mất đi, chưa được giải đoán trên ảnh
13, Biên tập bản đồ
Bản đồ được biên tập hoàn chỉnh cần bổ sung thêm các yếu tố như tên bản
đồ, khung lưới, chú giải, thước tỷ lệ,.... theo đúng quy định của từng loại bản đồ
14, In ấn và giao nộp sản phẩm , cập nhật CSDL
Bản đồ có thể được in ra dạng giấy hoặc lưu trữ ở dạng số phục vụ xây dựng
CSDL để đáp ứng yêu cầu quản lý, sử dụng của từng cơ quan và người sử dụng 4.2. Định hướng ảnh
4.2.1. Định hướng trong
Đối với phương pháp đo ảnh tương tự thì định hướng trong được thực hiện
nhằm khôi phục lại các yếu tố hình học trong của máy chụp ở thời điểm chụp ảnh.
Định hướng trong được thực hiện để tính các tham số chuyển đổi giữa hệ tọa
độ của mặt phẳng ảnh và hệ tọa độ không gian ảnh.
Cần xác định 3 tham số: tiêu cự f, tọa độ x0, y0 của điểm chính ảnh
trong hệ tọa độ mặt phẳng ảnh (các tọa độ này thường bằng 0).
Đối với phương pháp đo ảnh số, định hướng trong còn có nhiệm vụ tính toán
tham số chuyển đổi giữa hệ tọa độ điểm ảnh và hệ tọa độ mặt phẳng ảnh: x = a1 + a2c + a3r y = b1 + b2c + b3r
Trong các hệ thống đo vẽ ảnh số hiện đại, định hướng trong còn có nhiệm vụ
hiệu chỉnh các biến dạng hình học do độ méo của hệ thống kính vật.
Các thao tác định hướng trong:
Chọn mấu khung muốn nhập tọa độ trong danh sách phía dưới bên trái
màn hình. Sau đó bấm chuột sơ bộ vào vị trí mấu khung này, trên ảnh
phóng to sẽ hiển thị mấu khung được phóng to. Bấm chuột chính xác
vào tâm mấu khung rồi bấm nút ghi nhận tọa độ mấu khung.
Sau khi nhập đủ 4 tọa độ mấu khung, ghi lại kết quả định hướng.
Chuyển sang tấm ảnh khác để định hướng trong.
4.2.2. Định hướng ngoài
Định hướng ngoài khôi phục lại vị trí và hướng của máy chụp ảnh tại thời
điểm chụp, thông qua việc xác định các nguyên tố (yếu tố) định hướng ngoài.
Đối với một ảnh đơn, có 6 nguyên tố định hướng ngoài, trong đó 3 đại lượng
là tọa độ Xs, Ys, Zs của tâm chiếu hình, 3 đại lượng còn lại là góc xoay φ,
ω, k của các trục x, y, z của hệ tọa độ không gian ảnh so với hệ tọa độ mặt đất.
Các nguyên tố định hướng ngoài được xác định trên cơ sở đo đạc, tính toán
các điểm khống chế trên mặt đất.
Để định hướng ảnh đơn cần tối thiểu 4 điểm khống chế mặt bằng.
4.2.3. Định hướng cặp ảnh lập thể
Quá trình phục hồi những điều kiện hình học lúc chụp ảnh của cặp ảnh lập
thể để tạo nên mô hình lập thể được gọi là quá trình định hướng cặp ảnh lập thể.
Nhiệm vụ của định hướng cặp ảnh lập thể là xác lập vị trí không gian của 2
tấm ảnh trong hệ tọa độ mặt đất.
Mỗi cặp ảnh sẽ có 12 nguyên tố định hướng (vì mỗi tấm ảnh trong cặp ảnh có 6 nguyên tố).
Được xác lập trong 2 bước: định hướng tương đối (5 nguyên tố) và
định hướng tuyệt đối (7 nguyên tố) mô hình lập thể.
a. Định hướng tương đối
Xác định vị trí tương đối của 2 tấm ảnh như lúc chụp ảnh mà chưa cần định
hướng chúng trong hệ tọa độ mặt đất.
Chỉ xác định chênh lệch giữa các nguyên tố định hướng ngoài của 2 tấm ảnh:
BX = Xs2 - Xs1, BY = Ys2 - Ys1, BZ = Zs2 - Zs1
Δω = ω2 - ω1, Δφ = φ2 - φ1, Δк = к2 - к1
Để định hướng tương đối, người ta đo tọa độ các cặp điểm ảnh cùng tên trên
cả ảnh trái và ảnh phải.
Mỗi cặp điểm ảnh cho 1 giá trị thị sai dọc và thị sai này cho phép các định 1
nguyên tố định hướng tương đối.
Để định hướng tương đối cần ít nhất 5 cặp điểm cùng tên trên cặp ảnh lập thể.
b. Định hướng tuyệt đối mô hình lập thể
Xác định tỷ lệ của mô hình và định hướng mô hình trong hệ tọa độ mặt đất.
Số nguyên tố định hướng tuyệt đối bằng 7 bởi vì trong số 12 nguyên tố định
hướng ngoài của cặp ảnh lập thể, 5 nguyên tố đã được sử dụng để định hướng tương đối.
Để định hướng tuyệt đối mô hình lập thể, cần có tối thiểu 7 tọa độ khống chế trên mặt đất.
Đó có thể là 3 điểm khống chế không cùng nằm trên một đường
thẳng, trong đó 2 điểm có đủ cả 3 tọa độ X, Y, Z (gọi là điểm khống
chế tổng hợp) và 1 điểm biết độ cao Z (gọi là điểm khống chế độ cao).
4.3. Điểm khống chế ảnh và công tác tăng dày khống chế Khái niệm:
Các điểm khống chế ảnh là những điểm địa vật được đánh dấu vị
trí trên các ảnh đo và đồng thời được xác định tọa độ của chúng
trong hệ tọa độ mặt đất.
Công tác tăng dày khống chế ảnh: là công tác dựa trên các tính chất
hình học cơ bản của ảnh đo và các nguyên lý về mối quan hệ giữa ảnh
đo, mô hình lập thể và miền thực địa để thiết kế các phương pháp đo
đạc trong phòng nhằm xác định tọa độ mặt đất của các điểm khống
chế ảnh thay cho phần lớn công tác đo đạc ngoài thực địa. Các điểm
khống chế được xác định trong phòng là điểm khống chế tăng dày.
Điểm khống chế ảnh = điểm khống chế mặt đất + điểm khống chế tăng dày
Cách xác định số lượng, phân bố các điểm khống chế trên khối ảnh:
Về nguyên tắc, cần tối thiểu 2 điểm khống chế tổng hợp và 1 điểm
khống chế độ cao. Tuy nhiên trong thực tế để tăng độ chính xác người
ta phải đo 4 hay nhiều hơn điểm khống chế mặt đất. Trong trường hợp
sử dụng 4 điểm khống chế tổng hợp thì các điểm này phải nằm ở 4
góc của dải bay trong miền chồng phủ của cặp ảnh đầu tiên và cặp ảnh
cuối cùng. Để đạt được độ chính xác cao hơn, thì trong 1 dải bay cứ 3
tấm ảnh phải đo thêm 2 điểm khống chế mặt đất. Ngoài ra, có thể bổ
sung thêm 1 số điểm ở 2 đầu tuyến. Khi lựa chọn điểm khống chế nên
bố trí chúng trong miền chồng phủ ngang giữa các dải bay để có thể
sử dụng chung cho cả 2 tuyến.
Các điểm khống chế ảnh phải khống chế được toàn bộ các cảnh ảnh
trong khu vực. Số lượng điểm khống chế ảnh tối thiểu là 12 điểm/ 01
cảnh ảnh được bố trí phân bố đều trong mỗi cảnh ảnh viễn thám.
Mỗi cảnh ảnh phải có ít nhất 2 điểm kiểm tra, được bố trí tại các vị trí
nằm xen giữa các điểm khống chế ảnh;
4.4. Bình sai khối: khái niệm, các yếu tố ảnh hưởng đến kết quả bình sai khối
Khái niệm: phương pháp bình sai lưới tam giác ảnh không gian được gọi
là bình sai khối (block adjustment)
Bình sai khối sử dụng phương pháp bình sai tham số, các tham số được
chọn là các đại lượng cần xác định
Phương pháp bình sai khối theo chùm tia (bundle block adjustment) là
phương pháp hay được sử dụng nhất trong công nghệ ảnh số
Các yếu tố ảnh hưởng đến kết quả bình sai khối:
Tọa độ của các điểm nối
Tọa độ của các điểm khống chế mặt đất
Các nguyên tố định hướng ngoài
Nếu có thể đo được các yếu tố định hướng ngoài, nhất là tọa độ tâm
ảnh, thì cấu hình của lưới tam giác ảnh không gian sẽ vững hơn rất nhiều
và số điểm khống chế mặt đất có thể giảm bớt.
4.5. Mô hình lập thể số và các phương pháp hiển thị mô hình lập thể số
- Khái niệm, 3 điều kiện xây dựng và quan sát mô hình lập thể
- 4 phương pháp hiển thị mô hình lập thể số: khái niệm, ưu nhược điểm từng phương pháp
1, Khái niệm, 3 điều kiện
Khái niệm: mô hình lập thể được tạo bởi sự giao hội của các tia chiếu cùng
tên (cùng tới 1 điểm địa vật nhưng từ 2 tâm chụp) trên cặp ảnh lập thể. Đối
với ảnh số, cặp điểm ảnh cùng tên được giới hạn bởi pixel và mô hình lập
thể hiển thị trên màn hình máy tính được gọi là mô hình lập thể số
3 điều kiện xây dựng và quan sát mô hình lập thể:
Hình ảnh địa vật: phải được chụp trên 2 tấm ảnh với 2 tâm chụp khác
nhau: địa vật phải nằm trong miền chồng phủ của 2 tấm ảnh tạo nên cặp ảnh lập thể
Cặp ảnh lập thể:
Phải được định hướng thích hợp: các tia chiếu cùng tên trên 2 tấm
ảnh phải giao nhau trong không gian
Với mô hình lập thể số: cặp ảnh lập thể phải được định vị 1 cách
thích hợp trên máy tính và được giao hội các tia chiếu cùng tên Khi quan sát:
Mỗi mắt chỉ thấy được 1 ảnh tương ứng của cặp ảnh lập thể
Với MHLTS: cần phải có các thiết bị hỗ trợ như kính quan sát, phần
cứng, phần mềm hỗ trợ, kỹ thuật hiển thị
2, 4 phương pháp hiển thị MHLTS
Phương pháp hiển thị ảnh riêng biệt
Khái niệm: là phương pháp đơn giản nhất để hiển thị cặp ảnh lập thể
trên máy tính, màn hình máy tính chia thành 2 cửa sổ trái và phải và
tấm ảnh nào sẽ hiển thị trên cửa sổ đó Ưu điểm: Rất đơn giản
Không có yêu cầu cao đối với phần cứng Nhược điểm:
Trường nhìn lập thể bị giảm đi nhiều do 2 tấm ảnh hiển thị trên 2 cửa sổ riêng biệt
Phương pháp bổ sung màu Khái niệm:
cơ sở tính chất của ánh sáng
phương pháp này dựa trên :
ánh sáng xanh không qua được kính lọc màu đỏ và ngược lại, từ đó
ngta nhuộm tia sáng từ ảnh trái thành màu đỏ, từ ảnh phải thành xanh,
qua kính lọc sắc mỗi mắt của kỹ thuật viên chỉ thấy được ảnh tương
ứng và phát sinh hiệu ứng lập thể Ưu điểm: Khá đơn giản
Yêu cầu đối với phần cứng thấp
Kính lọc sắc đơn giản và rẻ tiền Nhược điểm:
Tổn thất về cường độ ánh sáng lớn do sử dụng các bộ lọc màu Ảnh bị tối hơn bthg
Khi làm việc với ảnh màu nhiều thông tin về màu sắc bị mất khi nhìn qua kính lọc sắc
Phương pháp lật trang
Khái niệm: màn hình máy tính liên tục hiển thị ảnh trái và phải
thay phiên nhau với tần số rất lớn (>= 60Hz cho mỗi ảnh), người sử
dụng sẽ đeo kính đặc biệt và mỗi khi màn hình lật trang thì kính
stereo shutter glasses sẽ tự động tắt/ bật mắt trái hoặc phải để đảm bảo
các mắt kỹ thuật viên nhìn thấy ảnh tương ứng Ưu điểm:
Chất lượng hình ảnh lập thể cao nhất Nhược điểm: Khá đắt tiền
Yêu cầu card đồ họa chuyên dụng và màn hình có tần số quét
mành từ 120Hz trở lên với độ phân giải cao
Do hình ảnh thay đổi liên tục nên kỹ thuật viên sẽ rất nhanh bị mỏi mắt
Phương pháp trộn dòng xen kẽ
Khái niệm: chia toàn bộ khung hình thành 2 bán khung trái- phải
tương ứng với 2 ảnh của mô hình lập thể, mỗi bán khung quét bằng
những dòng chẵn- lẻ nhất định, kỹ thuật viên sẽ đeo kính stereo
shutter và mỗi mắt chỉ thấy 1 ảnh tương ứng Ưu điểm: Có hiệu suất cao Nhược điểm:
Độ phân giải màn hình bị chia đôi nên đòi hỏi phải sử dụng
màn hình có tần số quét lên tới 150Hz và hỗ trợ chế độ interlace mode
Kỹ thuật viên sẽ rất khó nhìn thấy nội dung trên màn hình
4.6. Kỹ thuật khớp ảnh tự động: khớp ảnh theo vùng, một số giải pháp nâng
cao hiệu quả khớp ảnh
Quá trình đo ảnh lập thể đều dựa trên nguyên tắc tìm kiếm các điểm ảnh cùng tên thực hiện
, thế mạnh của công nghệ ảnh số là quá trình này được 1
cách tự động bằng kỹ thuật khớp ảnh tự động
Khớp ảnh theo vùng là 1 trong 3 phương pháp khớp ảnh tự động a, Khái niệm
Khớp ảnh theo vùng là tìm kiếm sự trùng khớp giữa các vùng của 2
tấm ảnh trên cơ sở phân tích độ xám của các pixel trong các vùng đó
Có 2 phương pháp chính là: khớp ảnh bằng hệ số tương quan chéo
và khớp ảnh bằng phương pháp số bình phương nhỏ nhất
b, Khớp ảnh bằng hệ số tương quan chéo (cross-correlation)
Dựa trên hệ số tương quan chéo để tìm ra các cặp ảnh có hệ số tương
quan giống hoặc gần giống nhau (giống nhất)
Trên 1 cặp ảnh lập thể:
Ảnh trái: chọn ra 1 cửa sổ mục tiêu kích thước 3*3 (lẻ)
Ảnh phải: chọn cửa sổ mục tiêu với kích thước lớn hơn
→ Tìm ra miền gần đúng nhất trên 2 ảnh
Hệ số tương quan chéo thường có giá trị [-1→0→1]
Do đk chụp khác nhau và sai số trong quá trình xử lý ảnh nên hệ số tương
quan chéo thường chỉ đạt giá trị cực đại bằng 0,7:0,99
Các sai số nhỏ phát sinh chủ yếu là do sự khác biệt về hình học và vật lý giữa 2 tấm ảnh
Sai số lớn (sai số thô) thường xảy ra ở những vùng có đặc điểm sau:
Có độ xám trên ảnh tương đối đồng nhất (độ tương phản thấp): mặt nước, bóng…
Có độ xám mang tính chu kỳ: ruộng trồng màu
Bị ẩn khuất: mặt của nhà cao tầng..
Có độ dốc lớn gây biến dạng hình học các đtg không giống nhau trên ảnh
Có thay đổi đột ngột về độ cao: chân nhà khớp nhầm nóc nhà…
c, Khớp ảnh bằng phương pháp bình phương nhỏ nhất (least squares correlation)
Sử dụng phương pháp này để tìm ra vị trí của cửa sổ tìm kiếm phù hợp
nhất với cửa sổ mục tiêu
Cho phép tính đến độ xám và những khác biệt về hình học của hình ảnh
đối tượng trên ảnh trái và phải
→ Hiệu quả khi đtg trên mặt đất có hình dạng hơi khác nhau trên ảnh, ví dụ độ dốc bề mặt quá lớn…
Thiết lập mối quan hệ độ xám giữa 2 cửa sổ tìm kiếm và mục tiêu thực
hiện bằng phương pháp vòng lặp , trong các vòng lặp sau giá trị gần đúng
của các tham số được lấy từ kết quả của vòng lặp trước
Ưu điểm: chúng có thể cho kết quả với độ chính xác tới 0,1 pixel
Nhược điểm: yêu cầu vị trí gần đúng ban đầu của cửa sổ tìm kiếm phải có
độ chính xác tới một vài pixel
Một số giải pháp nâng cao hiệu quả khớp ảnh:
Khớp ảnh bằng hệ số tương quan chéo trước để tìm ra vị trí gần
đúng của điểm ảnh cùng tên với độ chính xác 1-2 pixel
→ Sử dụng khớp ảnh bằng phương pháp số bình phương nhỏ
nhất để tìm ra vị trí chính xác của điểm ảnh.
4.7. Thành lập mô hình số độ cao: khái niệm mô hình số độ cao, các phương
thức lấy mẫu cho mô hình số độ cao (4 phương thức)
4.7.1. Khái niệm mô hình số độ cao (MHSĐC)
Có 3 khái niệm về mô hình số độ cao:
Mô hình số độ cao (DEM) là mô
hình biểu diễn bằng số sự biến
thiên liên tục của độ cao bề mặt địa hình trong không gian đều.
DEM được sử dụng để thể hiện độ cao của các điểm trên bề mặt trái
đất, độ cao của các tầng đất, hoặc của mực nước ngầm.
Mô hình số địa hình (DTM) là các mô hình số miêu tả bề mặt mặt
đất nhưng không bao gồm các đối tượng vật thể trên đó.
Mô hình số bề mặt (DSM) là một mô hình số độ cao miêu tả bề mặt
mặt đất và bao gồm cả các đối tượng vật thể trên đó như nhà cửa, cây, đường giao thông,...
4.7.2. Các phương thức lấy mẫu cho mô hình số độ cao
1. Lấy mẫu theo lưới đều (lưới quy chuẩn)
Tạo ra một lưới gồm các ô hình vuông hay hình chữ nhật đều nhau
phủ kín khu vực cần thành lập MHSĐC.
Bằng kỹ thuật khớp ảnh tự động sẽ đo vẽ độ cao cho các điểm mắt
lưới (tọa độ x, y đã được xác định khi tạo lưới).
Một số điểm mắt lưới có thể rơi vào những vùng không thể khớp ảnh
hay khó khớp ảnh nên có thể có (về độ cao) hay bị sai số lớn bỏ trống
(không đo) hoặc bị xê dịch đi một khoảng cách nào đó để rơi vào miền dễ ghép ảnh.
Khoảng cách giữa các mắt lưới D có thể được lựa chọn bằng công thức sau:
D = kP x Ma
với P là độ phân giải quét ảnh (μm), Ma là mẫu số tỷ lệ của ảnh.
với k là hệ số phụ thuộc vào đặc điểm địa hình, k=0.08 ÷ 0.09 ở vùng
núi và k=0.095 ÷ 0.105 ở vùng đồng bằng. Ưu điểm:
Đơn giản, có độ cao chính xác và hiệu suất công tác tương đối cao. Nhược điểm:
Tính hữu dụng chỉ được giới hạn ở các địa hình tương đối đồng nhất.
Với địa hình không đồng nhất thì có xu hướng đo dư thừa quá
mức số điểm tại các vùng ít có chênh cao. Ngược lại có quá ít
điểm để miêu tả được địa hình tại các vùng phức tạp.
Không thể hiện được các điểm đặc trưng địa hình. Quy trình tạo MHSĐC:
Xây dựng mô hình lập thể -> Tạo lưới đo (grid) -> Đo vẽ độ cao tự
động -> Quan sát lập thể, kiểm tra lỗi -> Đo vẽ bổ sung các yếu tố đặc
trưng của địa hình -> Nội suy, tạo MHSĐC
2. Lấy mẫu theo phương thức lấy mẫu nhích dần
Mật độ của các điểm lấy mẫu được làm thích ứng với độ phức tạp của bề mặt địa hình.
Tài liệu liên quan:
-

Đề thi hết môn học kì 1 Trắc địa đại cương năm học 2025-2026 - trường đại học Khoa học tự nhiên – Đại học quốc gia hà nội.
57 29 -

Tổng hợp bài tập trắc địa đại cương | Trắc địa đại cương | Trường Đại học Khoa học Tự nhiên, Đại học Quốc gia Hà Nội
63 32 -
Phương Pháp Đo Hướng và Đo Cao | Trắc địa đại cương | Trường Đại học Khoa học Tự nhiên, Đại học Quốc gia Hà Nội
84 42 -

Kỹ Thuật Lập Quy Hoạch Sử Dụng Đất Cấp Tỉnh | Trắc địa đại cương | Trường Đại học Khoa học Tự nhiên, Đại học Quốc gia Hà Nội
66 33 -

Đề cương ôn thi - Phương pháp biểu diễn địa hình | Trắc địa đại cương | Trường Đại học Khoa học Tự nhiên, Đại học Quốc gia Hà Nội
54 27