Đề thi cuối học kì 1 năm học 23-24 Môn Mechatronic Servo System Control | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
Đề thi cuối học kì 1 năm học 23-24 Môn Mechatronic Servo System Control. Tài liệu được sưu tầm gồm 9 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: Mechatronic Servo System Control (SERV334029) 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:

Preview text:
lOMoAR cPSD| 58778885 etc %^iHhiho7}
TRUUNG DH SU’ PHAM KY THUAT TPHCM DE THI CUOI HOC KY I NAM HOC 23-24
KHOA DAO TAO CHAT LlTQfNG CA O
Mon: HE THONG TRUYEN DQNG SERVO BO MON CO DIEN TU* Ma mon hoc: SERV334029 Chu ky giam thi 1 ChiS ky giam thi 2
De so/Ma de: 01 De thi co 6 trang. Thai gian: 75 phut. Dugc phep su dung tai lieu.
SV lam bai true tiep tren de thi va nop lai de Diem va chir ky CB cham thi thu nhat CB cham thi thir hai
Ho va ten:.................................................................. 5 : • • • • 1 ( KIK* - ' ' >'
Ma so SV:.................................................................. t*(), v- ■ * ■
S6 TT:.......................Phong thi:..............................
Phan 1 (Trac nghiem 5 diem)
Cau 1 (0.5d) . Choose the correct statement :
A. A current feedback signal is used to stabilize torque of a servo motor.
B. Torque saturation is a drawback of controlling a servo system
C. High speed opto couplers are used to isolate pulse signals in a servo system D. All true
Cau 2 (0.5d). Cho dOng ca buac PM chay a ch§ do vi buac vai he so chia buac N = 20. Tinh xung
PWM a buac dau tien..............................?
Cau 3 (0.5d). Cau khang djnh nao sau day la DUNG :
A. Noi suy SA khong chay noi suy duang thang
B. Noi suy DS cho ket qua chinh xac han noi suy SA vi cho phep chay true X va Y dong thai.
C. Noi suy lay mdu (sampled-data) cho ket qua chinh xac han cac phuang phap noi
suy xung chuan (reference pulses) D. Tat ca deu SAI
Cau 4 (0.5d). Cho dong ca buac co cau tao va so do kich nhu hinh Index 1 a lb a 2 b 2 - - 1 - » - 2 •- - - 1ac------- * ------- 024 | 3 - V - -1 - - t - * - - ibe — — oib S + . - 6 - « - I 7 - •- t - 8 - - - *
Cau tra lai nao sau day la DUNG
A. Dong ca buac loai PM dang hoat dong che do vi buac (microstep) vdi N = 8.
B. Su dung mach cong suat la mach cau H cho moi pha de dieu khien dong ca hoat dong theo so do kich.
C. Goc buac cua dong ca bang 30 do va dang hoat dong theo che do half-step D. B va C So hieu: B M3/QT-PDT-RDTV/02 lOMoAR cPSD| 58778885
Cau 5 (0.5d) . Sir dung hinh cau 4, tinh t6c do dong co biet thdi gian delay khi xuat xung T = 50 (ms ) A. 100 RPM B. 50 RPM C. 150 RPM
D....................(ghi ro dap an)
Cau 6 (0.5d). In a servo system, a PWM signal is :
A. to create a reference signal for a servo amplifier
B. is applied to a servo motor to control its velocity
C. normally isolated by a schottlcy diode
D. applied to the power amplifier E. C and D
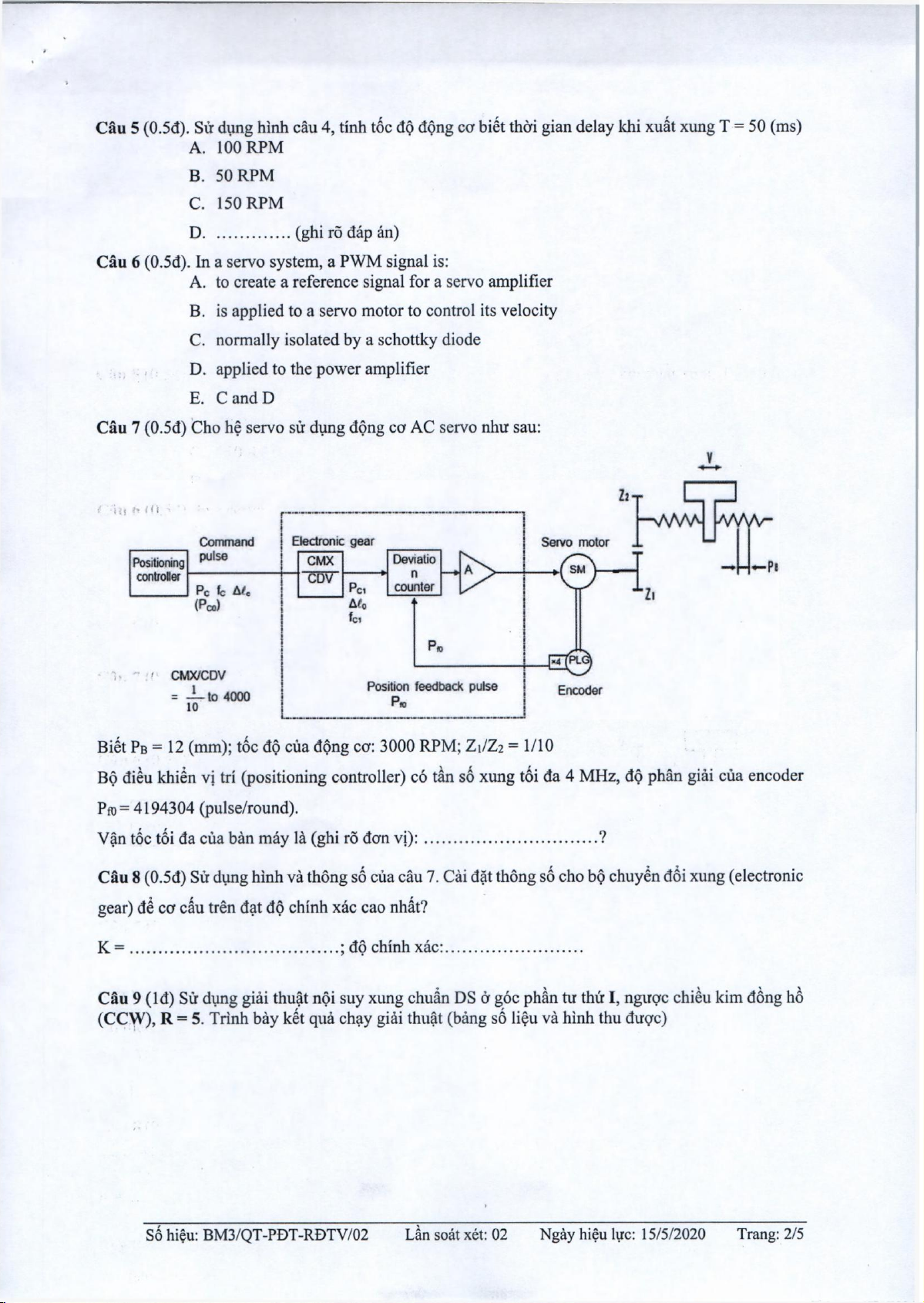
Cau 7 (0.5d) Cho he servo su dung dong co AC servo nhu sau :
Bi6t P b = 12 (mm); toe do cita dong co: 3000 RPM; Z 1 /Z 2 = 1/10
Bo dieu khien vi tri (positioning controller) co tan so xung toi da 4 MHz, do phan giai cua encoder Pro = 4194304 (pulse/round).
Van t6c t6i da cua ban may la (ghi ro don vi):
Cau 8 (0.5d) Su dung hinh va thong so cua cau 7. Cai dat thong so cho bo chuyen doi xung (electronic
gear) de co cau tren dat do chinh xac cao nhat?
K= ................................................ ; do chinh xac:.................................
Cau 9 ( Id) Su dung giai thuat noi suy xung chuan DS a goc phan tu thu: I, ngugc chieu kim dong ho
( CCW), R = 5 . Trinh bay ket qua chay giai thuat (bang so li?u va hinh thu dirge) So hieu: BM3/QT-PBT-RDTV/02 Ngay hieu luc: 15/5/2020 lOMoAR cPSD| 58778885 Bang ket qua (0.5d)
Ket qua goc I, CCW (0.5d)
Phan 2 (Tir luan 5 diem):
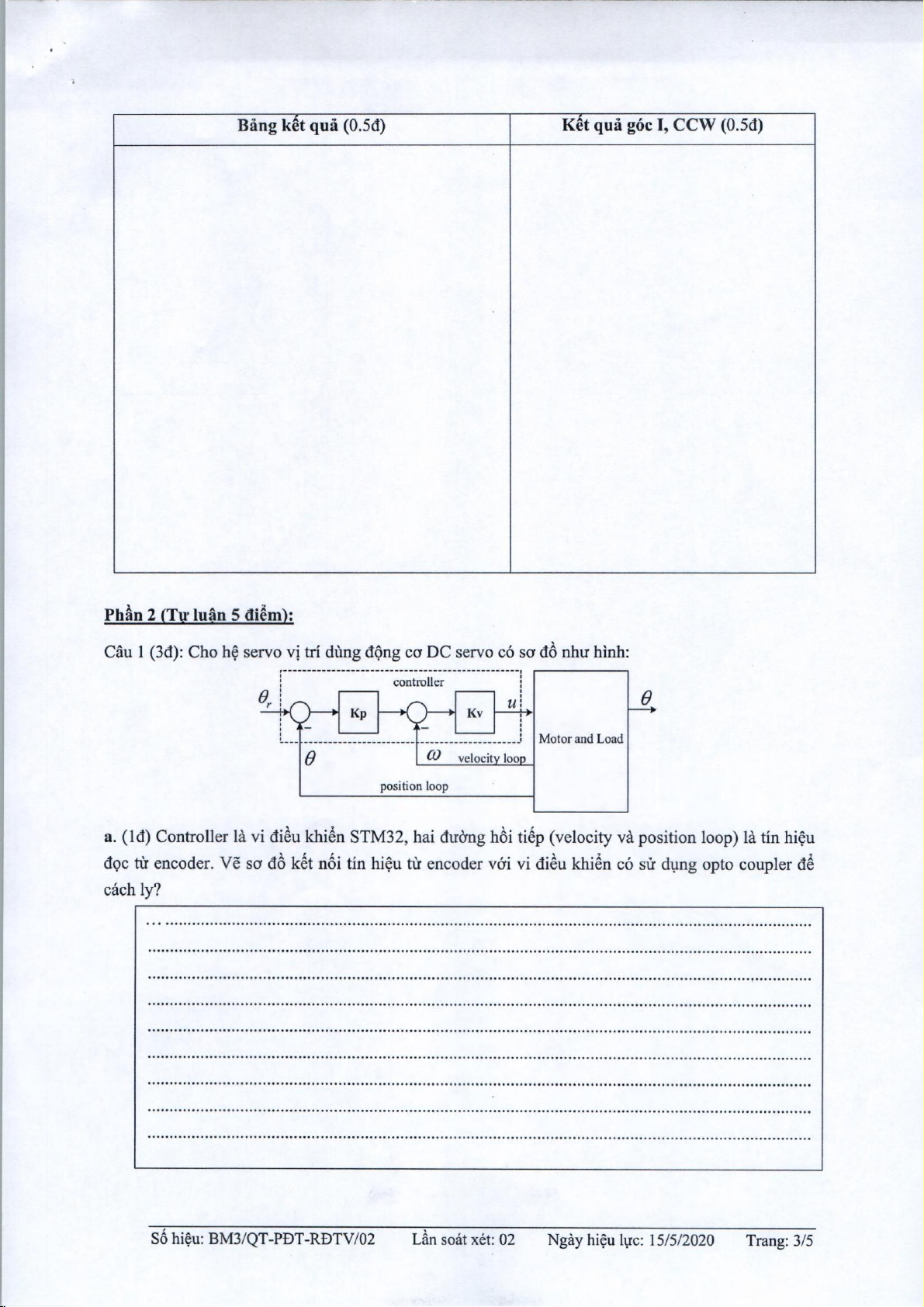
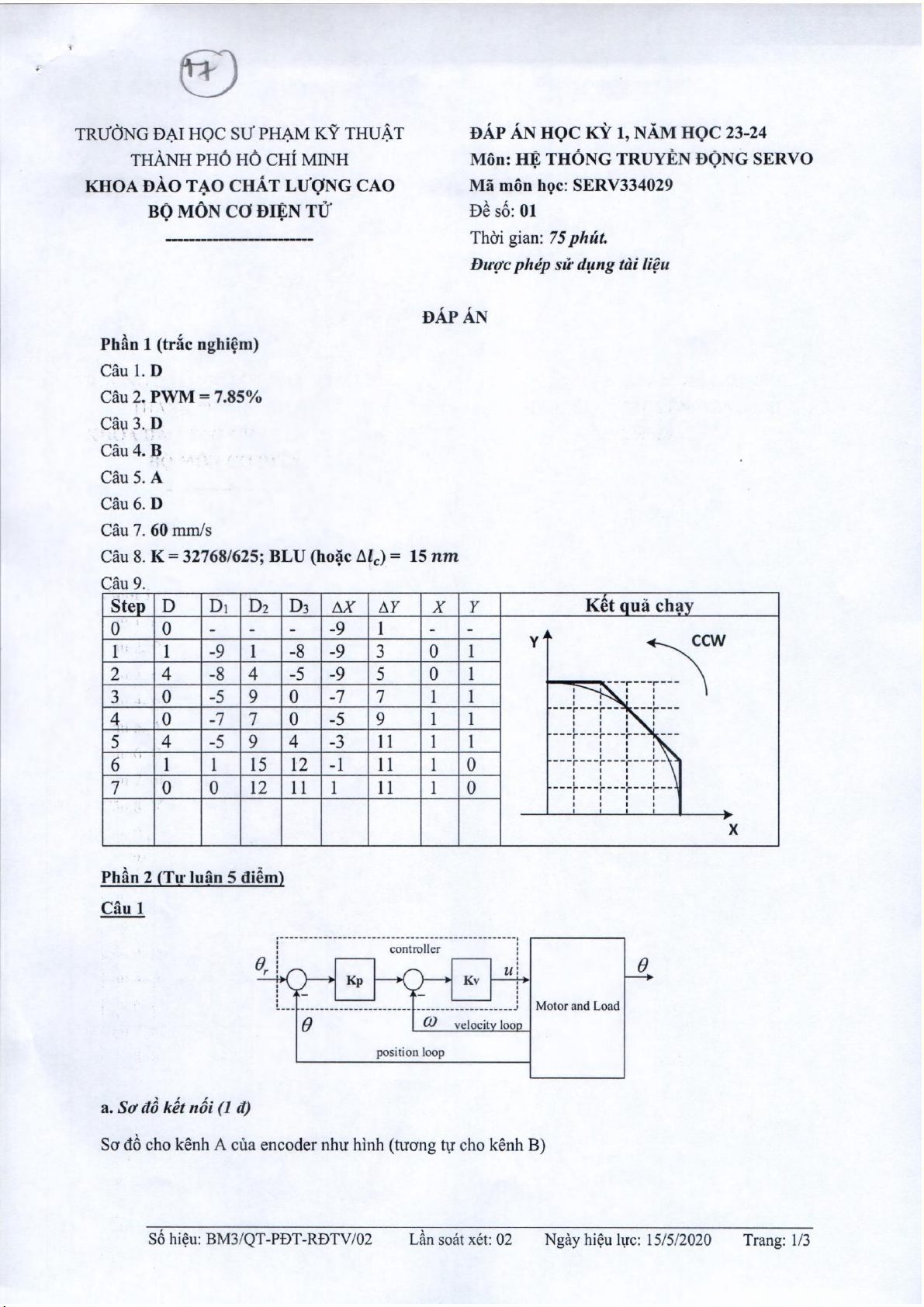
Cau 1 (3d): Cho he servo vi tri dung dong co DC servo co so do nhu hinh:
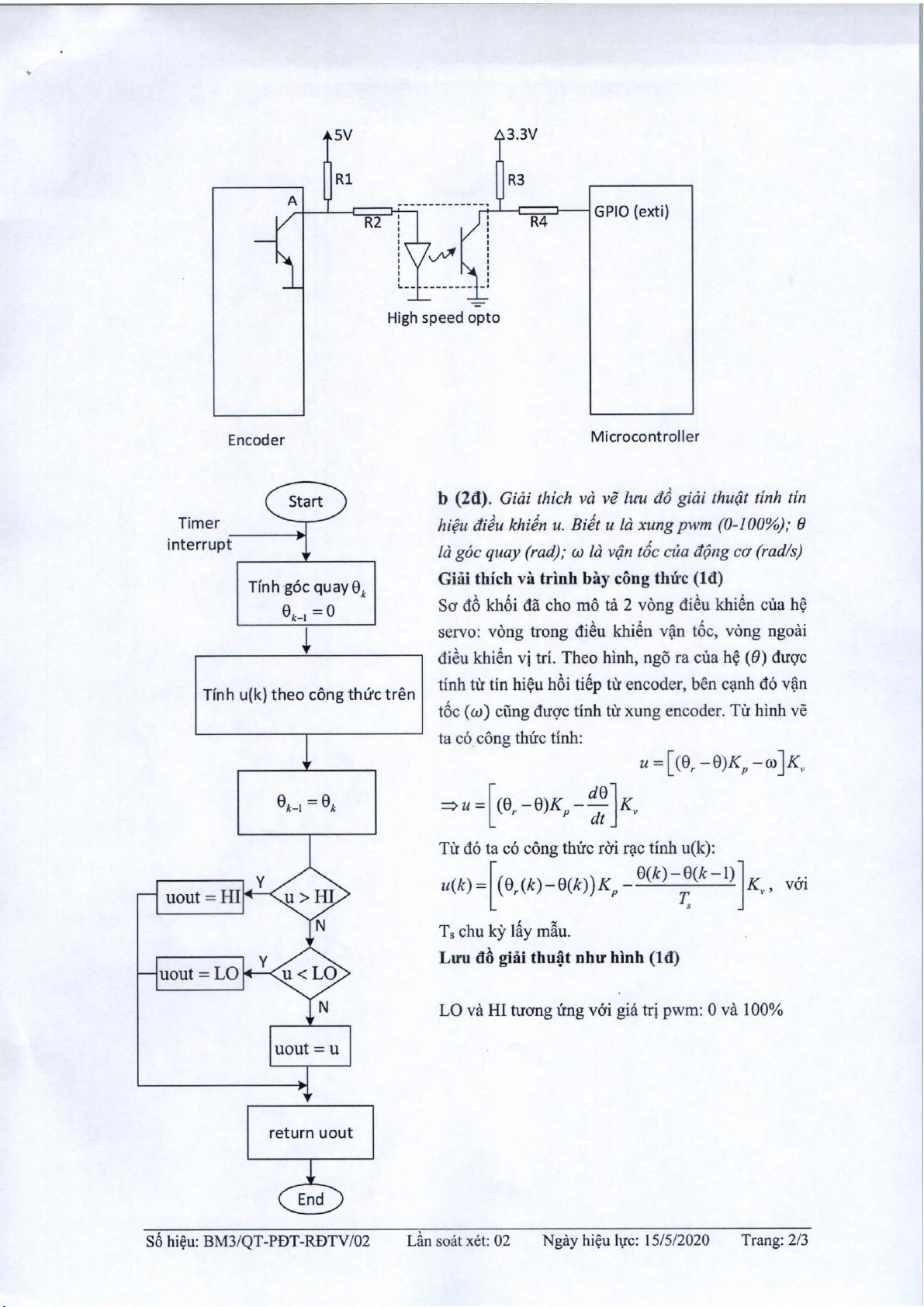
a. ( Id) Controller la vi dieu khien STM32, hai dudng hoi tiep (velocity va position loop) la tin hieu
doc tur encoder. Ve so do ket noi tin hieu tu encoder voi vi dieu khien co su dung opto coupler de each ly? S6 hieu: B M3/QT-PDT-RBTV/0 2 lOMoAR cPSD| 58778885
b. (2d) Giai thich va ve liru do giai thuat tinh tin hieu dieu khien u. Biet u la xung pwm (0-100%); 9
la goc quay (rad); ( o la van toe cua dong c a (rad/s)
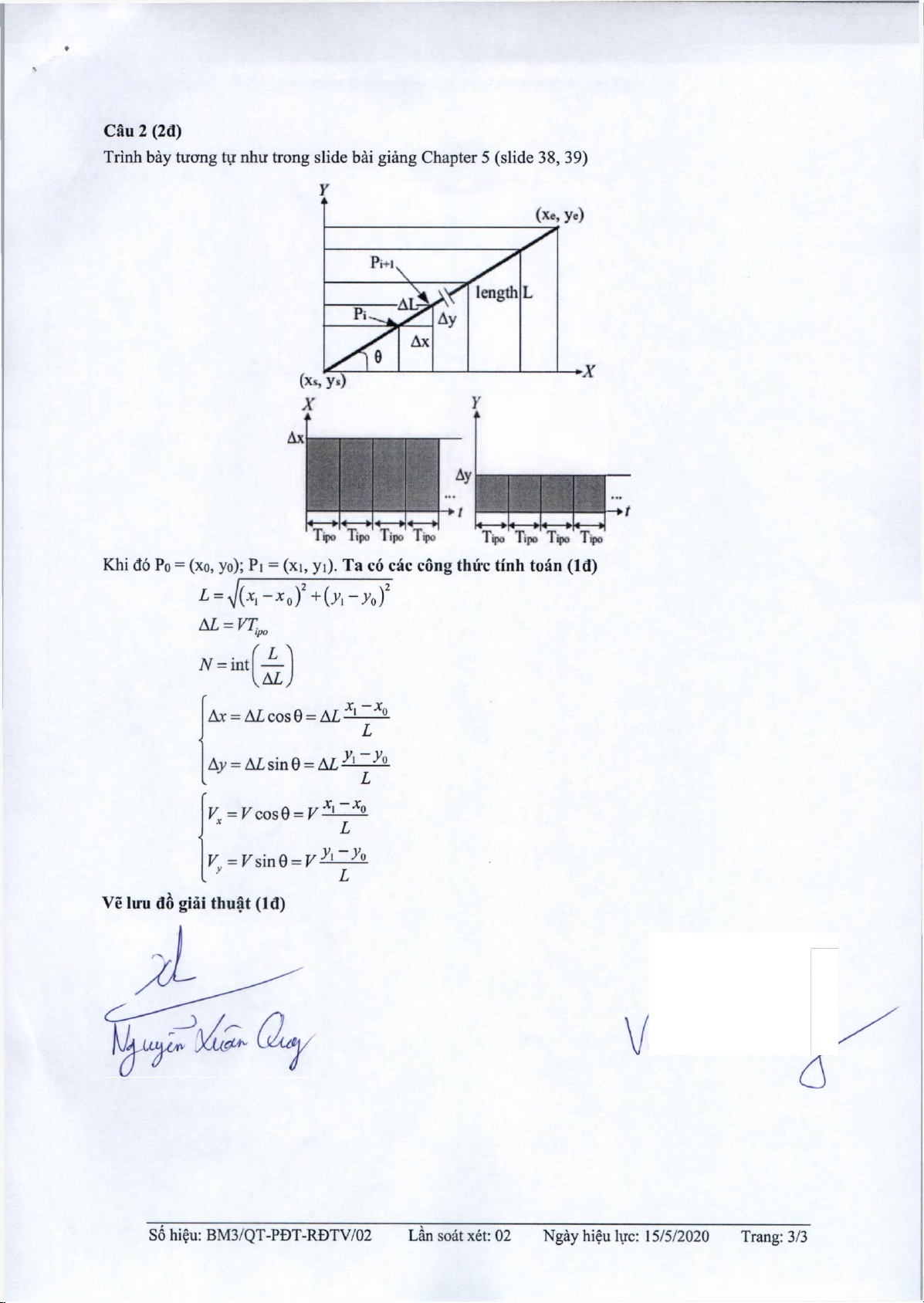
Cau 2. (2 d) Trinh bay va viet giai thuat noi suy theo phuong phap lay mau (sampled-data) de noi suy
ducmg thang tur diem Po(xo, yo) den diem Pi(xi, yi) So hieu: BM3/QT-PBT-RBTV/02 Ngay hieu lire: 15/5/2020 lOMoAR cPSD| 58778885
Ghi chu: Can bo coi thi khong ctuac giai thick de thi.
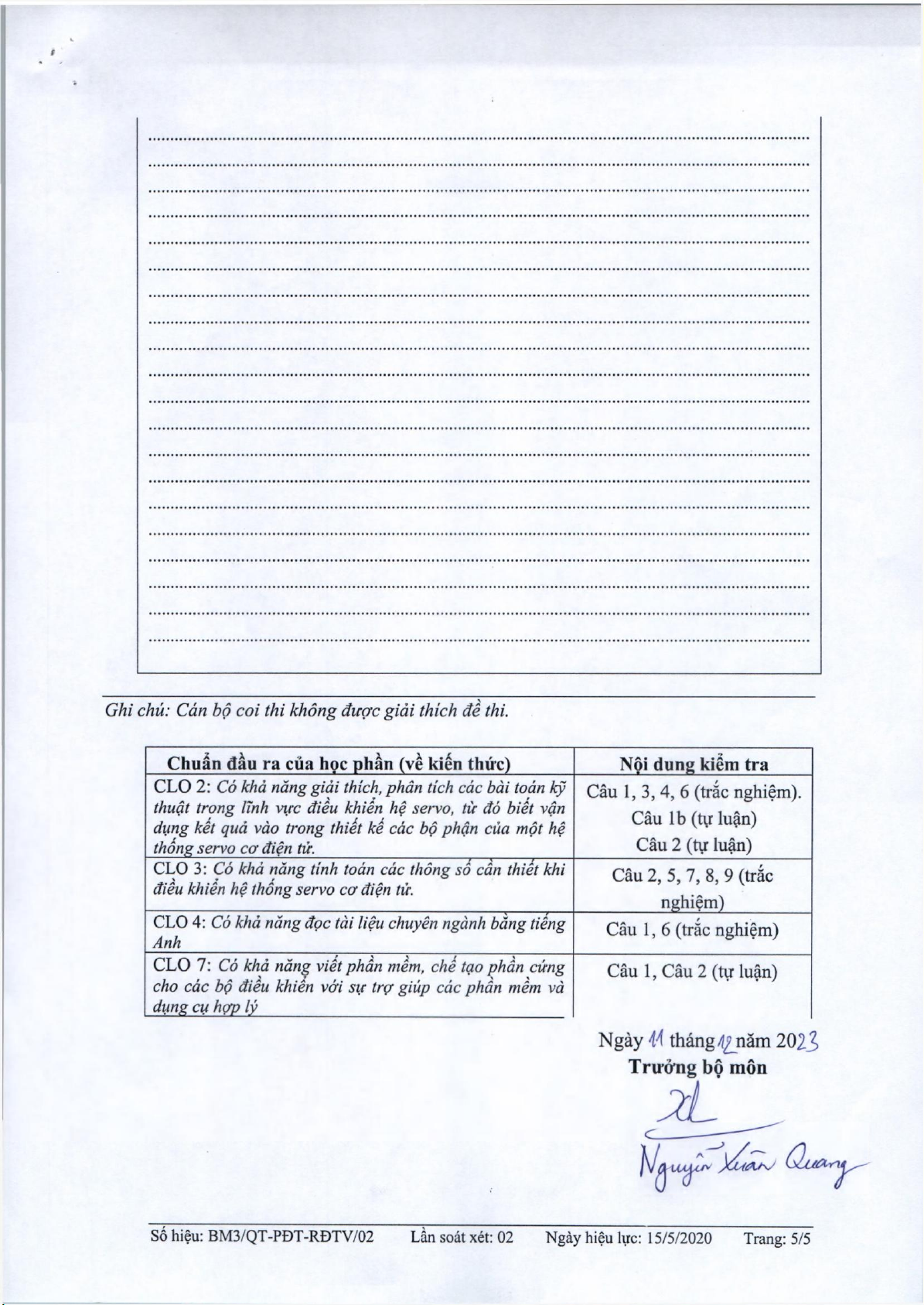
Chuan dau ra ciia hoc ph§n (ve kien thuc) Noi dung kiem tra
CLO 2: Co kha nang giai thich, phan tich cac bai toan ky Cau 1, 3, 4, 6 (trac nghiem).
thuat trong link virc dieu khien he servo, tic do biet van
dung ket qua vao trong thiet ke ccic bo phan cua mot he Cau lb (tir luan)
thong servo ca dien tic. Cau 2 (tir luan)
CLO 3: Co kha nang tinh toan cac thong so can thiet khi
Cau 2 , 5, 7 , 8, 9 (trie
dieu khien he thong servo co dien tic. nghiem)
CLO 4: Co kha nang doc tai lieu chuyen nganh bang tieng Cau 1, 6 (trac nghiem) Anh
CLO 7 : Co kha nang viet phan mem, che tao phan cieng Cau 1, Cau 2 (tu luan)
cho cac bo dieu khien v&i sic tra giiip cac phan mem vd dung cu hap ly Ngay thang/^nam 2023 Trirang bo nion
3 t . So hieu: B M3/QT-PDT-RDTV/0 2 lOMoAR cPSD| 58778885
b (2d). Gidi thick vd ve lieu do gidi thuat tinh tin
hieu dieu khien u. Biet u la xung pwm (0-100%); 6
la goc quay (rad); 0
) la van toe cua dong ca (rad/s )
Giai thich va trinh bay cong thux (Id)
Sa do khoi da cho mo ta 2 vong dieu khien cua he
servo: vong trong dieu khien van toe, vong ngoai
dieu khien vi tri. Theo hinh, ngo ra cua he (0) dugc
tinh tu tin hieu hoi tiep tu encoder, ben canh do van toe (ta co cong thuc tinh: u=[(Qr-Q)Kp- dQ ■ u = (0 r-0)^ - K dt
Tu do ta co cong thuc roi rac tinh u(k): Q(k)-Q(k-l)
u(k) - ( Q,(k)-B(k))Kp - Kv, vdi Ts chu ky lay mau.
Luu do giai thuat nhir hinh (Id)
LO va HI tuong ung voi gia tri pwm: 0 va 100%
So hieu: BM 3 /QT-PDT-RBTV/ 0 2 Lan soat xet: 02 Ngay hieu lire: 15/5/202 0 lOMoAR cPSD| 58778885 Cau 2 (23)
Trinh bay tirang ttr nhu trong slide bai giang Chapter 5 (slide 38, 39)
Khi do Po = (xo, yo); Pi = (xi, yi). Ta co cac cong thii'c tinh toan (Id) L = ^(xl-x0)2 +{yl-y0f AL = VT:, ipo f_L_' N = int \ALj
Ax = AL cos 0 = A L ——— Ay = AL sin 0 = AL ——— L F = Fcos0 = F ——— F = F sin 0 = F ——— L
Ve luu do giai thuat (Id) S6 hieu: BM3/QT-PDT-RDTV/02 Lan soat xet: 02 Ngay hieu lire: 15/5/2020
Tài liệu liên quan:
-

Matlab Simulation of DC Servo Motors for Control Systems | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
142 71 -

Hydraulic Servo System Overview with Mitsubishi Modules | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
127 64 -

Test 1: Servo Motor Control Loops & Feedback Strategies | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
107 54 -

Trạm AC servo và hydralic servo system | Báo cáo thực tập Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
130 65