Trạm AC servo và hydralic servo system | Báo cáo thực tập Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
FX3U-20SSC-H là một mô-đun chức năng đặc biệt của Mitsubishi Electric, được thiết kế để điều khiển vị trí và tốc độ của động cơ servo AC thông qua cap kết nối SSCNET III (mạng truyền thông tốc độ cao dựa trên cáp quang). Tài liệu được sưu tầm gồm 44 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: Mechatronic Servo System Control (SERV334029) 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:



Preview text:
lOMoAR cPSD| 58778885 GVHD: Võ Lâm Chương lOMoAR cPSD| 58778885 SVTH: Đỗ Ngọc Nhân 22146183 Dương Minh Nguyên 22146181
Lâm Chí Bảo 22146077 Nguyễn Anh Thắng Nhóm: Sáng thứ 5 tiết 1 - 6
Thành phố Hồ Chí Minh, tháng 3 năm 2025. MỤC LỤC
CHƯƠNG 1: TRẠM AC SERVO MOTOR .......................................................................................................................................... 1
1.1. Cơ sở lý thuyết ................................................................................................................................................................................... 1
1.1.1. Nội dung thí nghiệm ........................................................................................................................................................................ 1
1.1.2. Giới thiệu hệ thống .......................................................................................................................................................................... 1
1.1.2.1. Phần cứng ..................................................................................................................................................................................... 1
1.1.2.2. Sơ đồ nối dây ................................................................................................................................................................................ 6
1.1.2.3. Địa chỉ I/O .................................................................................................................................................................................... 7
1.2. Tiến hành thí nghiệm .......................................................................................................................................................................... 8
1.2.1. Cấu hình cho FX3U-20SSC-H ........................................................................................................................................................ 8
1.2.2. Viết chương trình PLC ................................................................................................................................................................... 15
1.2.3. Tính hệ số BLU ............................................................................................................................................................................. 20
1.2.4. Kết quả .......................................................................................................................................................................................... 22
CHƯƠNG 2: TRẠM HYDRAULIC SERVO SYSTEM .................................................................................................................... 28
1.1. Cơ sở lý thuyết ................................................................................................................................................................................. 28
1.1.1. Nội dung thí nghiệm ...................................................................................................................................................................... 28
1.1.2. Giới thiệu hệ thống ........................................................................................................................................................................ 28
1.1.2.1. Phần cứng ................................................................................................................................................................................... 28
1.1.2.2. Sơ đồ nối dây .............................................................................................................................................................................. 37
1.1.2.3. Sơ đồ khối ................................................................................................................................................................................... 39
1.1.3. Bộ điều khiển PID ......................................................................................................................................................................... 39
1.2. Tiến hành thí nghiệm ........................................................................................................................................................................ 40
1.2.1. Viết chương trình PLC ................................................................................................................................................................... 40
Tài liệu tham khảo ................................................................................................................................................................................... 42 lOMoAR cPSD| 58778885
CHƯƠNG 1: TRẠM AC SERVO MOTOR
1.1. Cơ sở lý thuyết
1.1.1. Nội dung thí nghiệm
- Động cơ và trình điều khiển servo AC.
- Lập trình PLC Mitsubishi.
- Bộ điều khiển chuyển động PX3U-20SSC-H.
- Nội suy tuyến tính và hình tròn - Mục tiêu thí nghiệm :
• Cấu hình và kiểm tra hoạt động của mô-đun FX3U-20SSC- H.
• Thực hiện các chế độ điều khiển: o Vận hành thử nghiệm
JOG (di chuyển thủ công). o Lập trình để thực hiện chuyển động theo mẫu có sẵn.
• Tính toán và phân tích các thông số BLU.
1.1.2. Giới thiệu hệ thống 1.1.2.1. Phần cứng
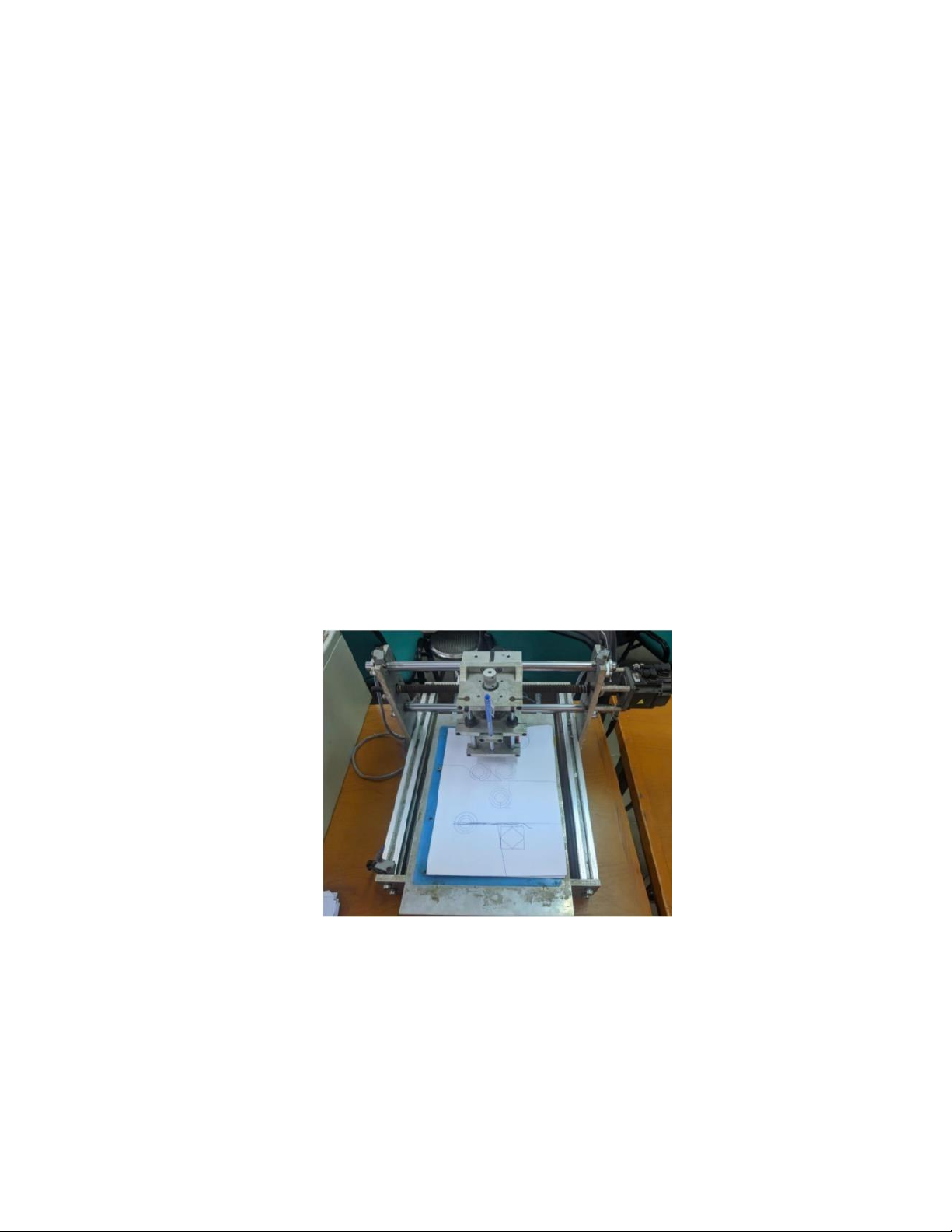
Hình 1 : Hệ thống servo 3 trục sử dụng mô-đun Mistubishi lOMoAR cPSD| 58778885
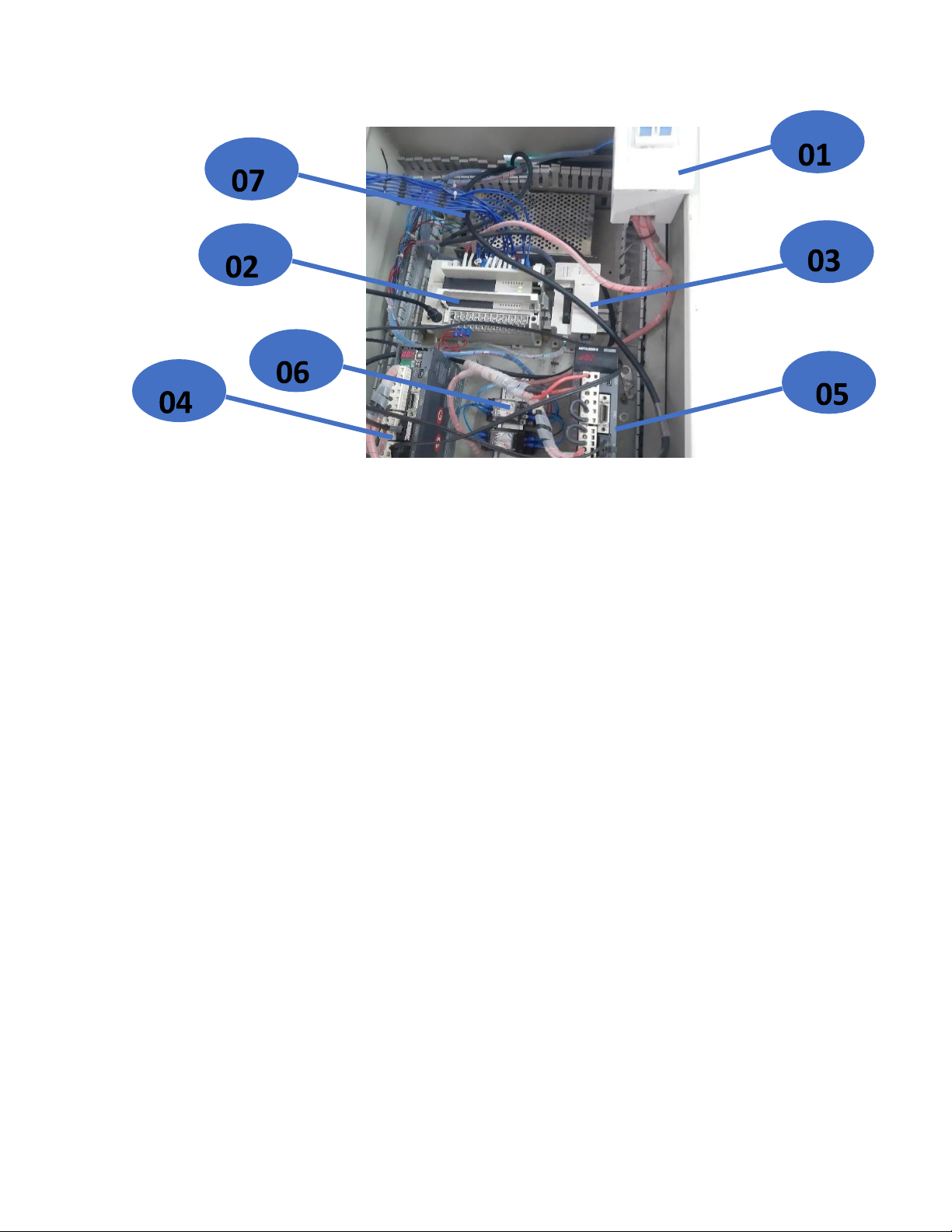
Hình 2: Tủ điều khiển của hệ thống
- Thành phần của tủ điện hệ thống: 01: CB tổng. 02: PLC Mitsubishi. 03: Modul FX3U-20SSC-H.
04, 05: Servo Driver (MR-J3-20B). 06: Relays. 07: Nguồn 24V-10A.
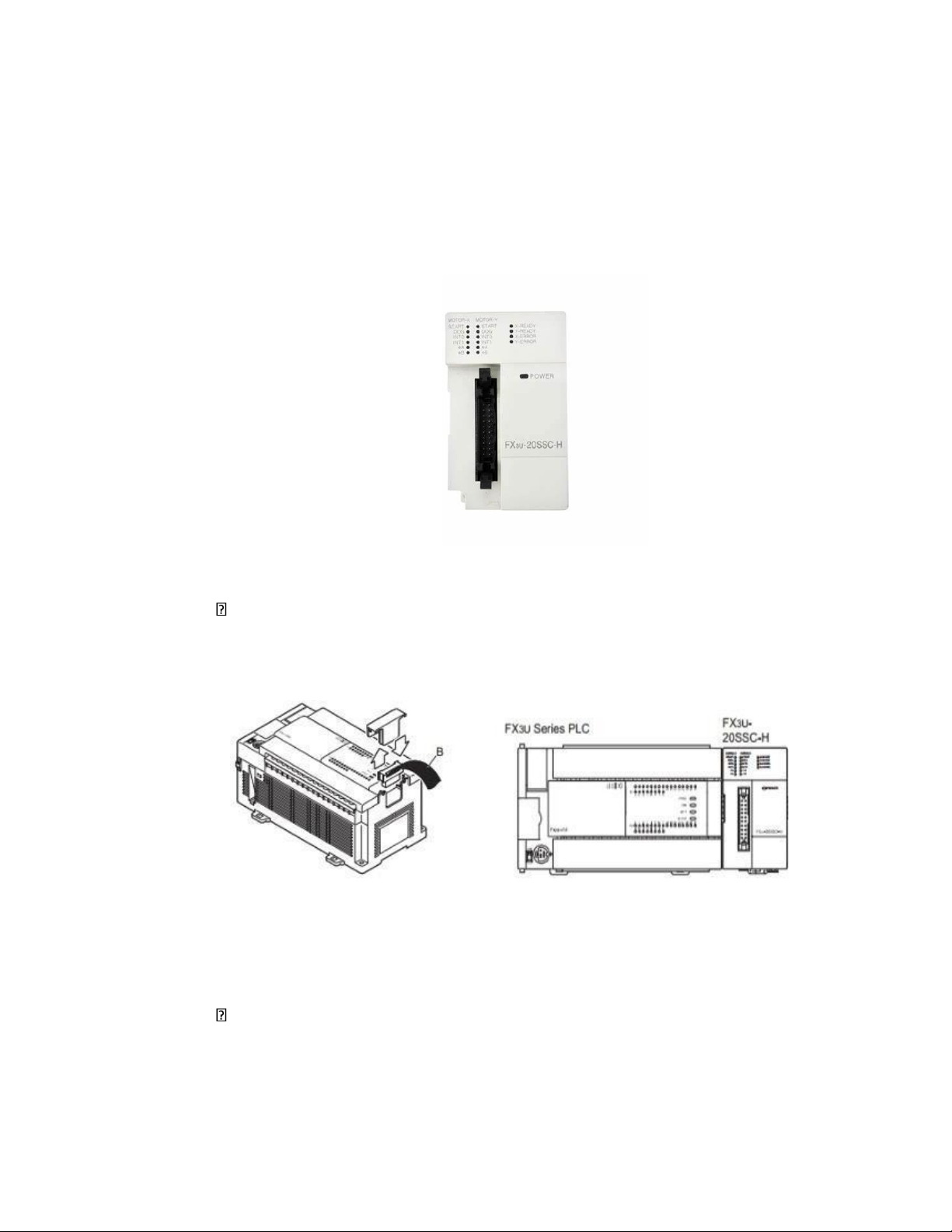
- Module điều khiển chuyển động FX3U-20S SC-H: • Giới thiệu:
FX3U-20SSC-H là một mô-đun chức năng đặc biệt của Mitsubishi
Electric, được thiết kế để điều khiển vị trí và tốc độ của động cơ servo AC
thông qua cap kết nối SSCNET III (mạng truyền thông tốc độ cao dựa trên
cáp quang). Mô-đun này tương thích với các bộ điều khiển động cơ AC servo
MR-J3-20B, có khả năng điều khiển 2 trục với nội suy tuyến tính và nội suy cung tròn. • Thông số kỹ thuật:
Số trục điều khiển: 2 trục. lOMoAR cPSD| 58778885 PLC: FX3U/FX3UC.
Bộ khuếch đại servo có thể kết nối: MELSERVO J3-□B, J3W-□B, J3□BS
Chiều dài dây: lên tới 50m. Bus servo : SSCNET III
Hình 3: Module FX3U-20SSC-H
Kết nối Module với PLC:
FX3U-20S SC-H kết nối với PLC FX3U-32M qua cổng mở rộng bên trái PLC
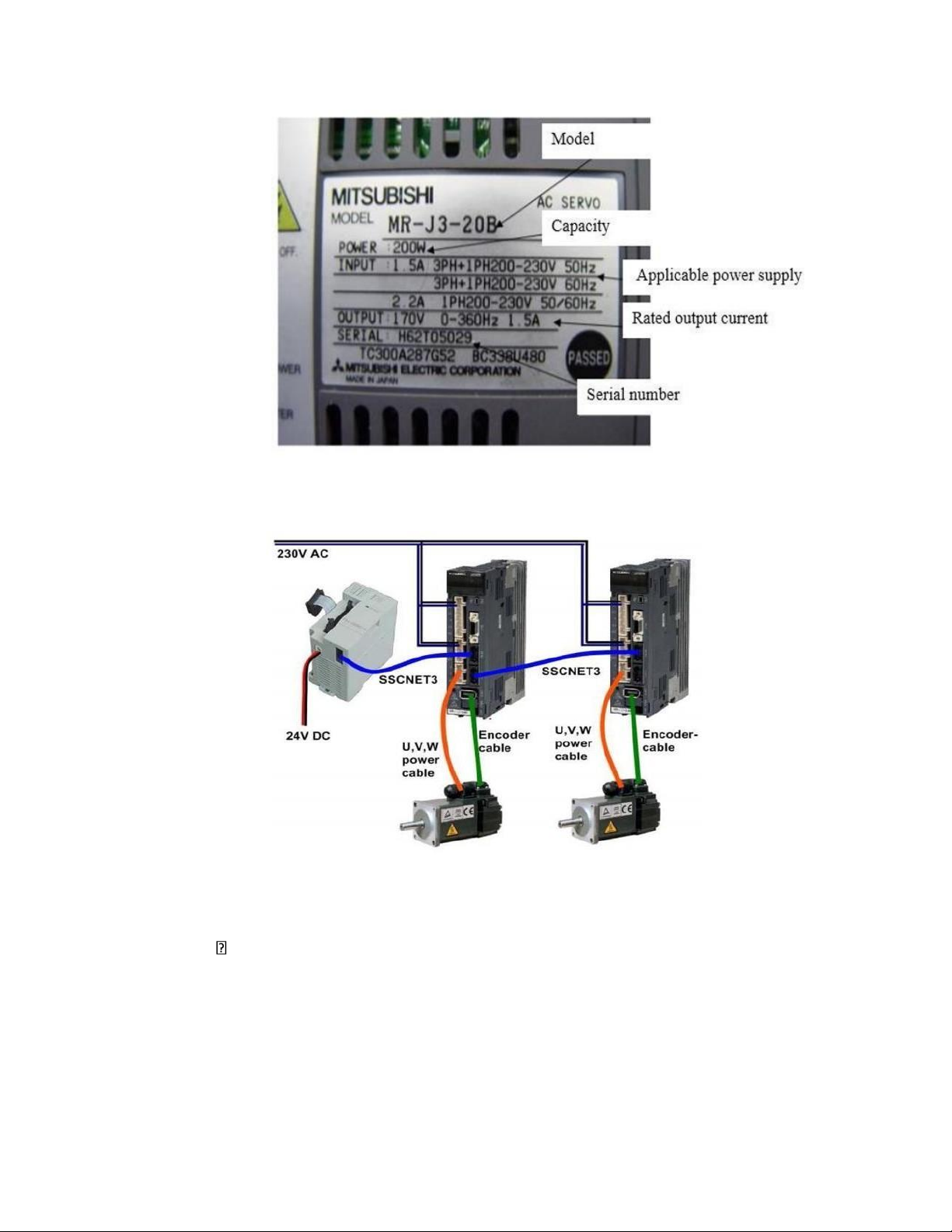
Hình 4: Kết nối module FX3U-20S SC-H với PLC FX3U-32M - Melservo MR-J3-20B: Giới thiệu:
MELSERVO MR-J3-20B là một bộ khuếch đại servo thuộc dòng
MELSERVO-J3 của Mitsubishi Electric, được thiết kế để cung cấp hiệu suất lOMoAR cPSD| 58778885
cao và độ chính xác vượt trội trong điều khiển chuyển động. Đây là phiên bản
có công suất 200W, phù hợp với các ứng dụng công nghiệp đòi hỏi khả năng
điều khiển mượt mà và chính xác.
Dòng Melservo MR-J3-20B có bảo vệ quá dòng main board.
Melservo MR-J3-20B có chức năng giao tiếp qua cổng USB, sử dụng
PC để cài đặt thông số, giám sát, AC servo thông qua phần mềm MR
Configurator , hỗ trợ giao tiếp qua SSCNET III, đảm bảo tốc độ truyền cao
và khả năng chống nhiễu mạnh mẽ.
Melservo MR-J3-20B có khả năng điều khiển vị trí với độ phân giải
262144 xung/vòng cho phép điều khiển chính xác hơn.
Hình 5: MELSERVO MR-J3-20B lOMoAR cPSD| 58778885
Hình 6: Mã định dạng của bộ điều khiển AC Servo MR-J3-20B
Hình 7: Sơ đồ kết nối MR-J3-20B với FX3u-20S SC-H và Servo - Cáp SSNET III: Giới thiệu:
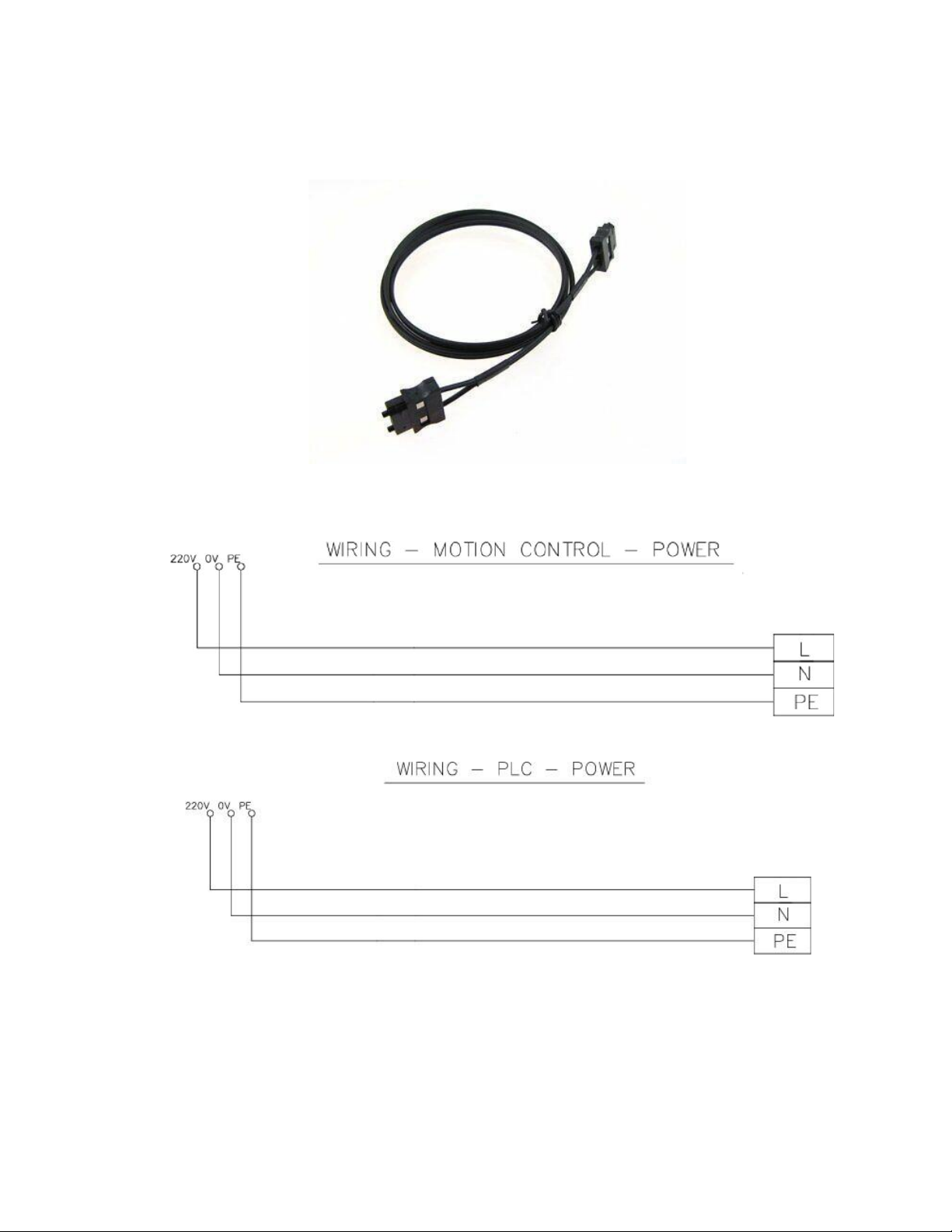
SSCNET III (Servo System Controller Network III) là một hệ thống
truyền thông tốc độ cao được Mitsubishi Electric thiết kế dành riêng cho việc
kết nối các thiết bị servo, bao gồm module điều khiển (như FX3U20SSC-H)
và bộ khuếch đại servo (như MELSERVO MR-J3-□B). lOMoAR cPSD| 58778885
Cáp SSCNET III sử dụng giao tiếp quang, giao tiếp hai chiều với tốc
độ cao. Tuy nhiên, cáp SSNET III nhạy với nhiễu.
Hình 8: Cáp SSCNET III
1.1.2.2. Sơ đồ nối dây
Hình 9: sơ đồ nối nguồn cho motion control
Hình 10: Sơ đồ nối nguồn cho PLC lOMoAR cPSD| 58778885
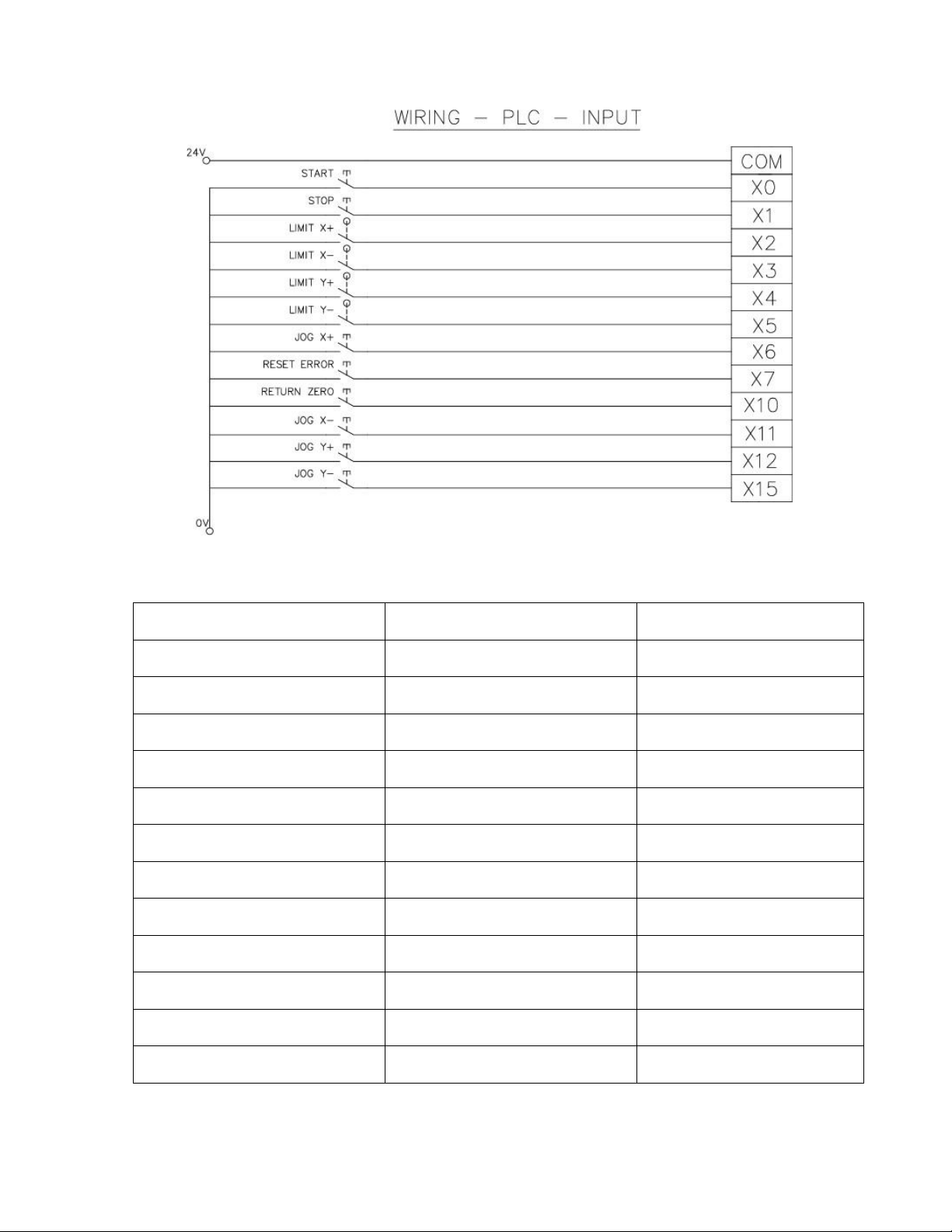
Hình 11: sơ đồ đấu nối ngõ vào cho PLC
1.1.2.3. Địa chỉ I/O ĐẦU VÀO LOẠI TIẾP ĐIỂM CHỨC NĂNG X0 NO START X1 NO STOP X2 NO LIMIT X+ X3 NO LIMIT X- X4 NO LIMIT Y+ X5 NO LIMIT Y- X6 NO JOG X+ X7 NO RESET ERROR X10 NO RETURN ZERO X11 NO JOG X- X12 NO JOG Y+ X15 NO JOG Y- lOMoAR cPSD| 58778885
1.2. Tiến hành thí nghiệm
1.2.1. Cấu hình cho FX3U-20SSC-H
Bước 1: Mở nguồn tổng, chuyển PLC về trạng thái STOP
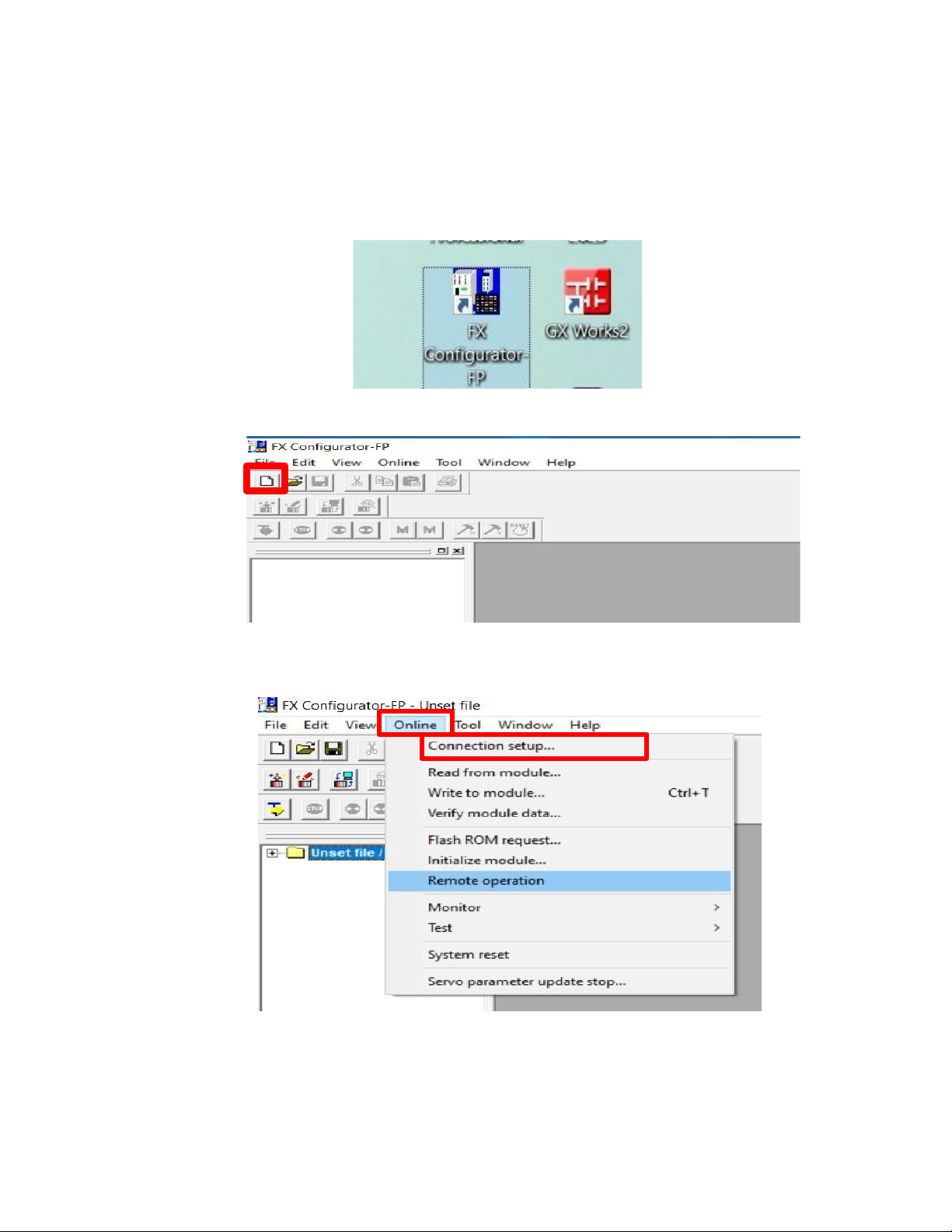
Bước 2: Mở phần mền FX Configurator Bước 3: Tạo file mới
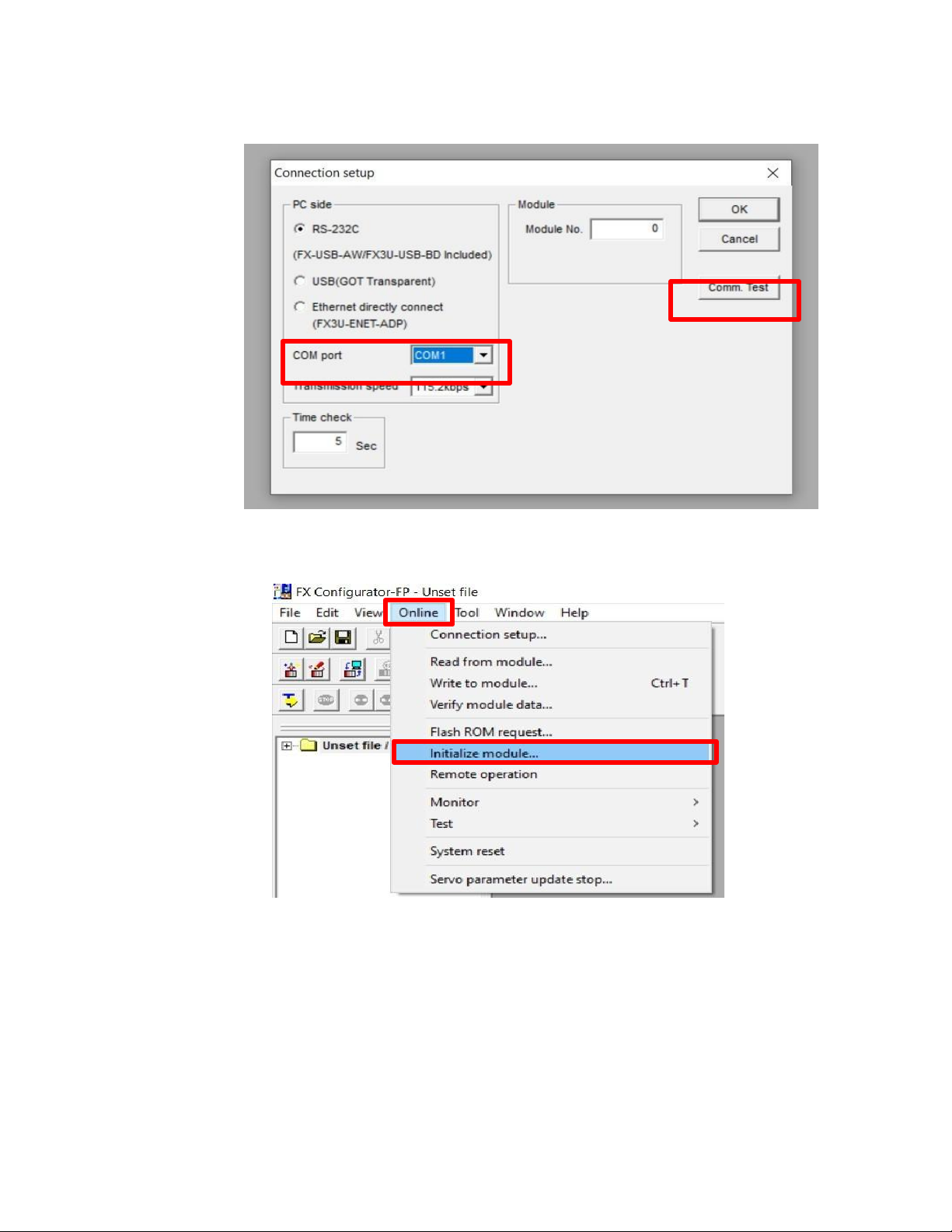
Bước 4: Kiểm tra kết nối: [Online] → [Connection setup]
Tại COM PORT: chọn cổng COMn ( Để xác định cổng COMn vào Device Manager để xem) lOMoAR cPSD| 58778885
Nhấn Comn. Test: để kiểm tra
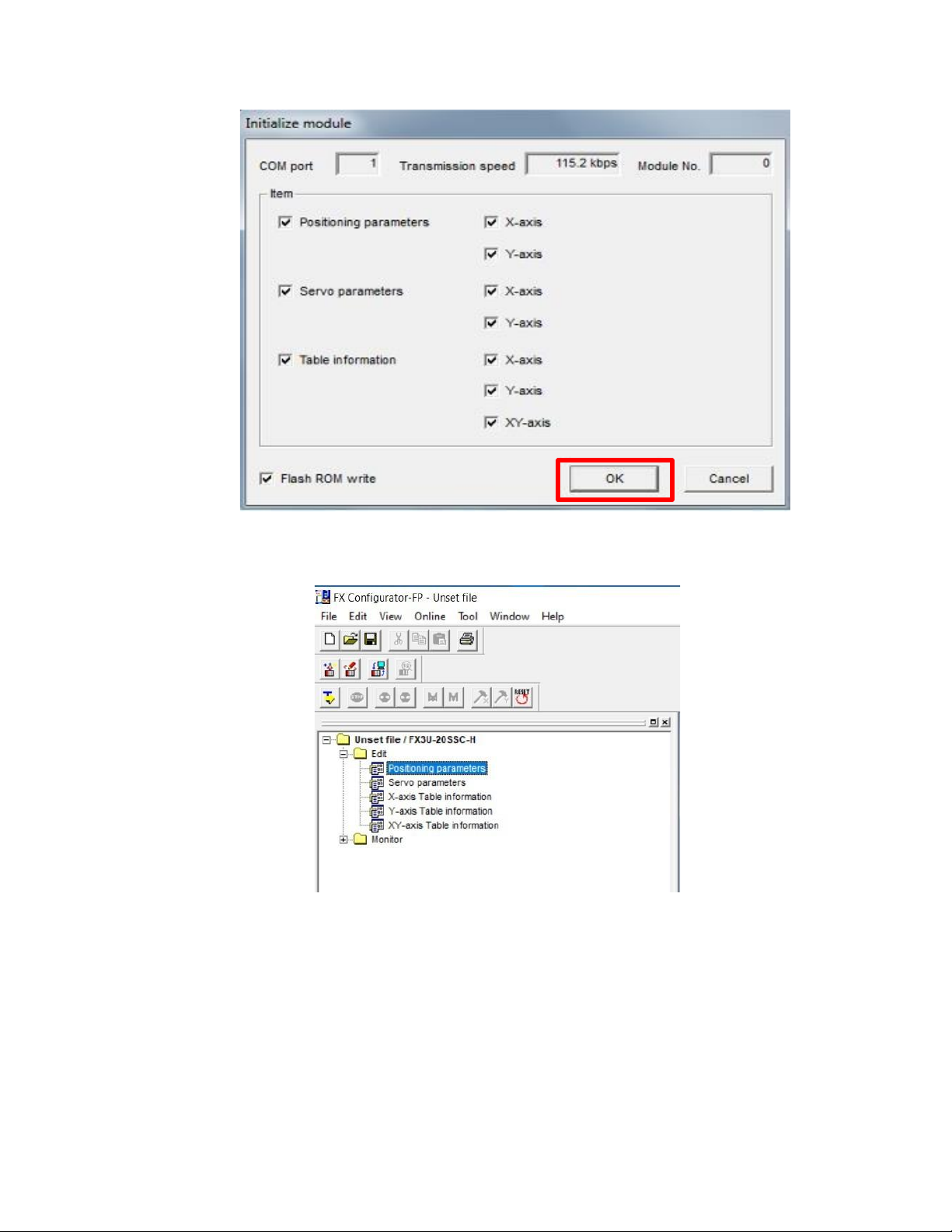
Bước 5: Cài đặt thông số module: [Online] → [Initialize module]
Tick chọn tất cả thông số có trong bảng Initialize module. Nhấn OK → Yes → OK lOMoAR cPSD| 58778885
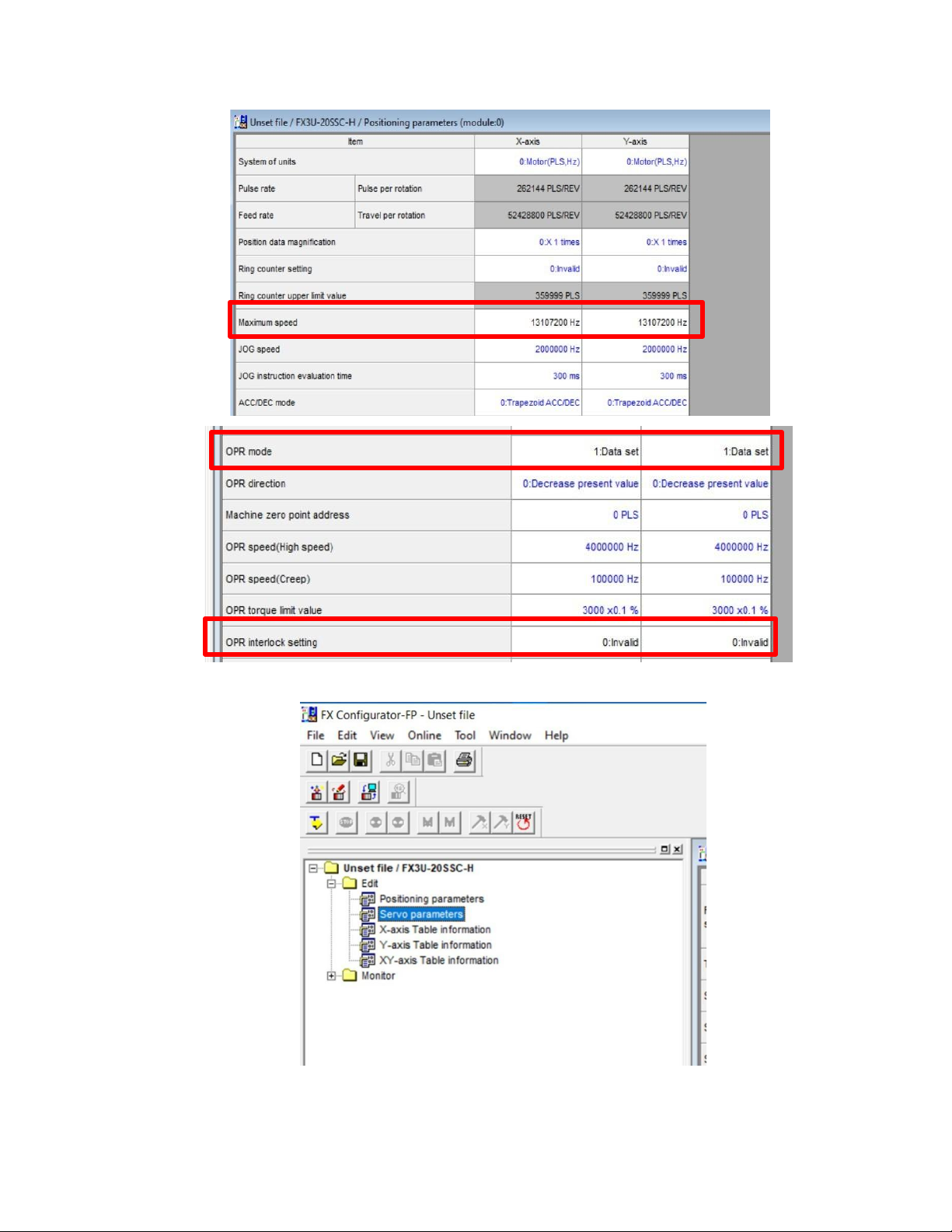
Bước 6: Cài đặt thông số vị trí trong file Positioning parameters lOMoAR cPSD| 58778885
Bước 7: Cài đặt thông số servo trong file Servo parameters lOMoAR cPSD| 58778885
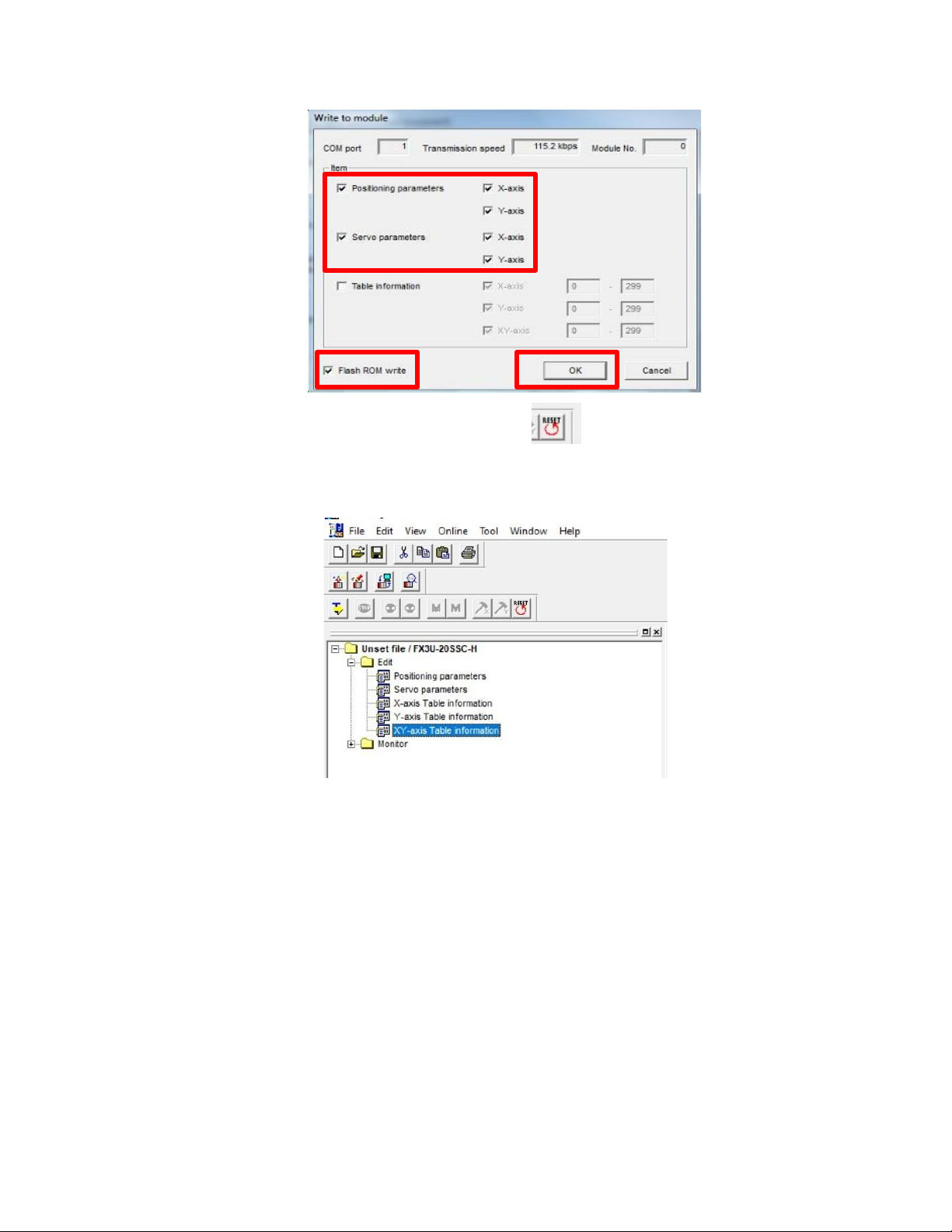
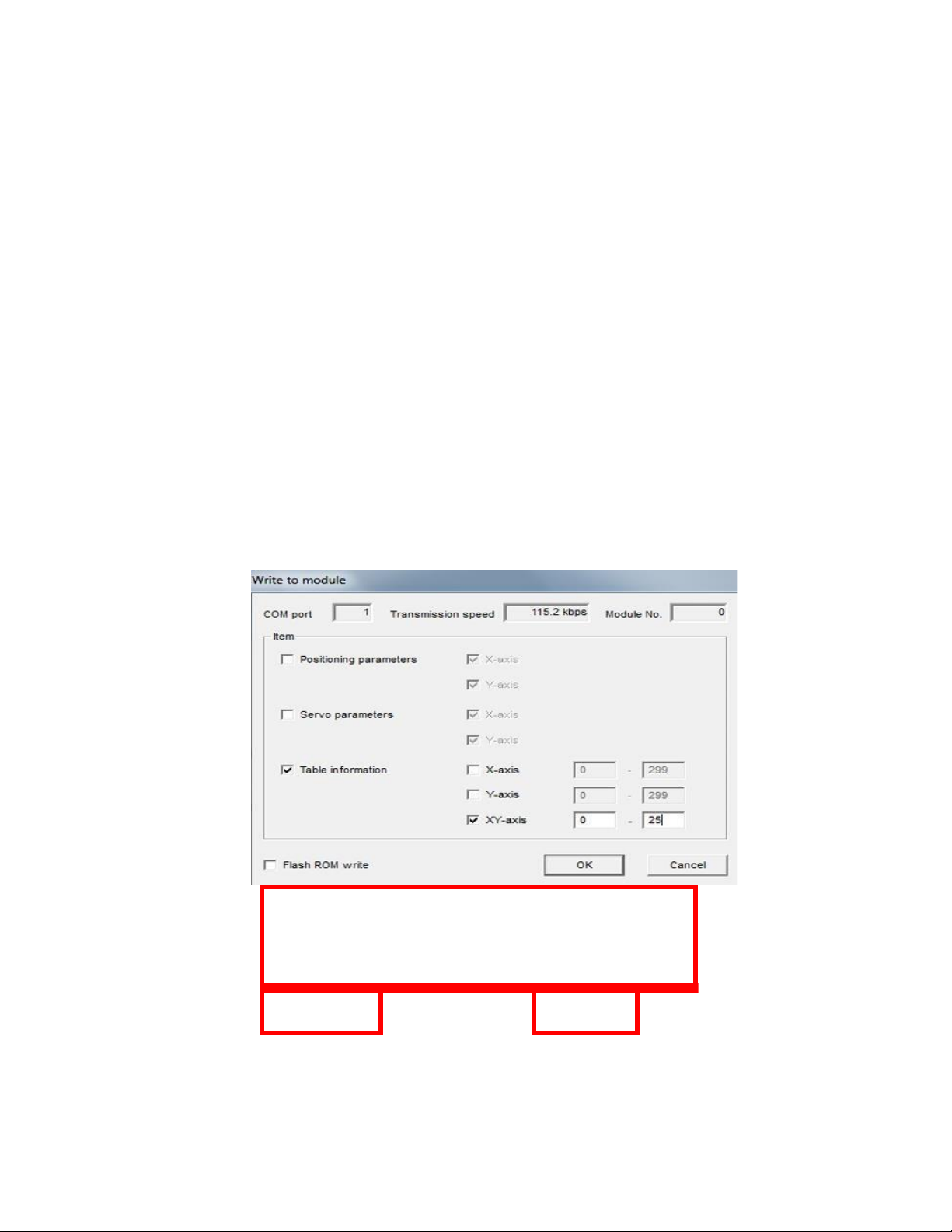
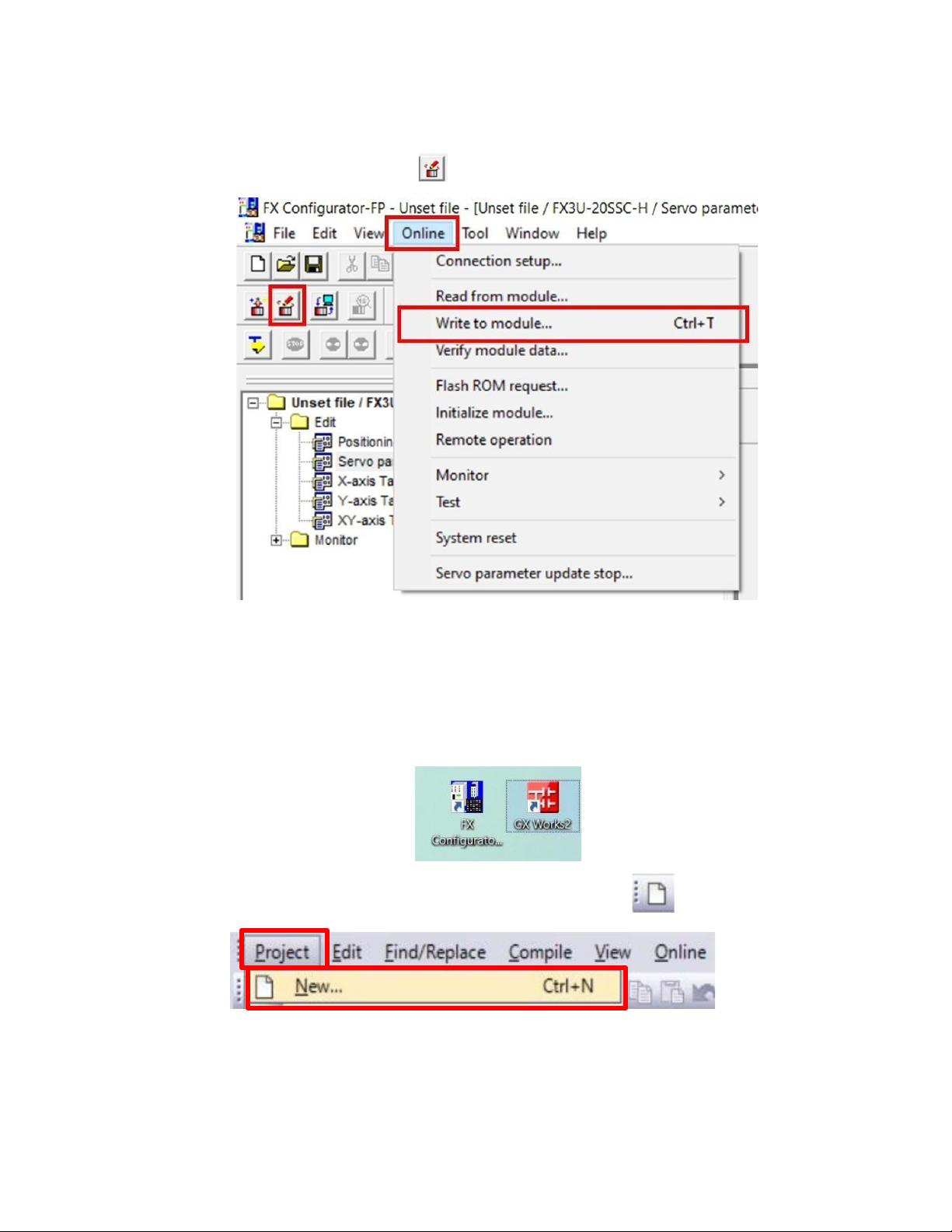
Bước 8: Viết thông số servo và vị trí xuống module: [ Online ] → [ Write to module ] hoặc
Tick chọn Positioning parameters, servo parameters và Flash Rom write Nhấn OK lOMoAR cPSD| 58778885
Bước 9: Reboot nguồn của hệ thống hoặc
Chuyển PLC về trạng thái RUN
Bước 10: Viết chương trình nội suy trong mục XY-axis Table information lOMoAR cPSD| 58778885
11: Viết chương trình xuống module: [Online] lOMoAR cPSD| 58778885 Bước → [ Write to module] hoặc
Tick chọn Table information, XY-axis.
Tại ô XY-axis chỉnh về 0 – 25. Nhấn OK
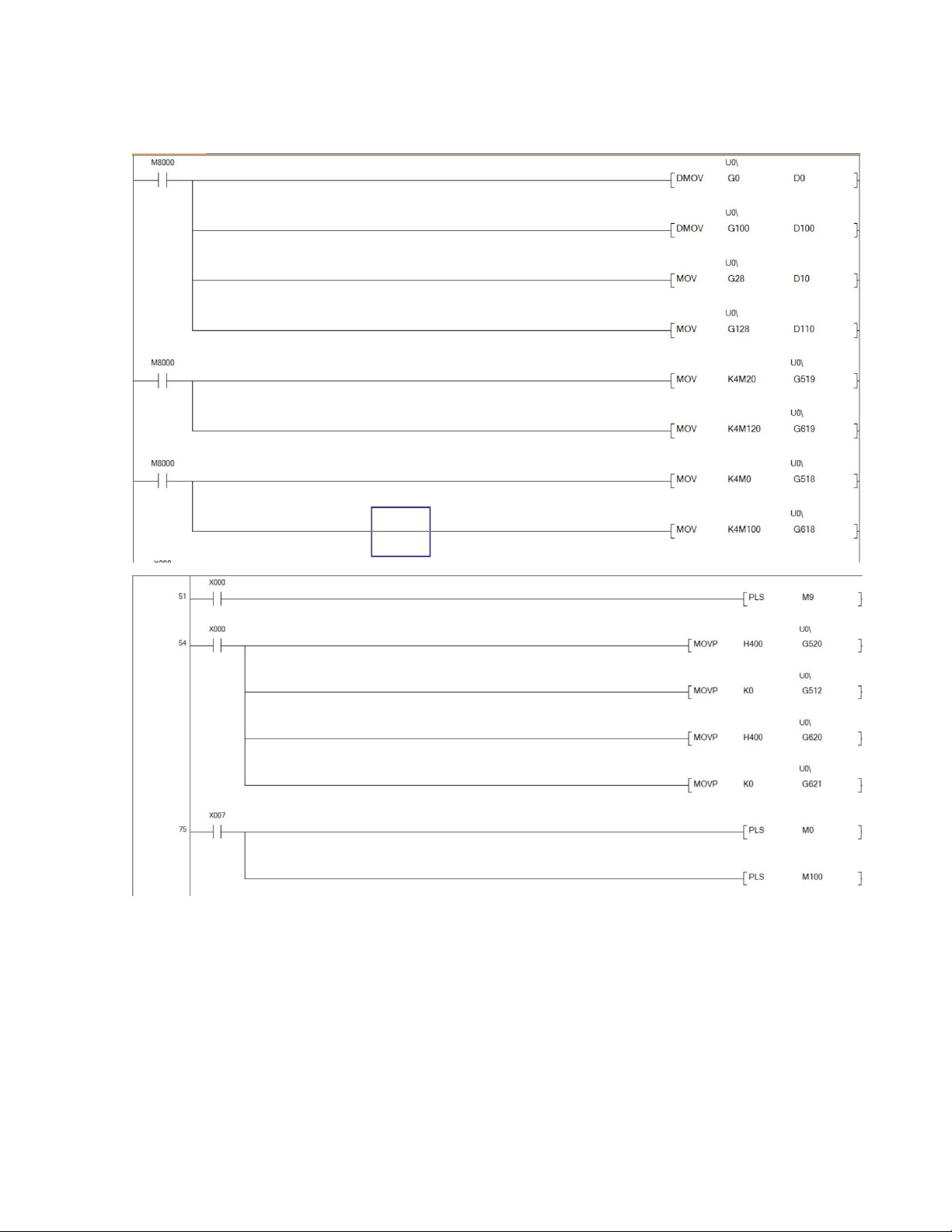
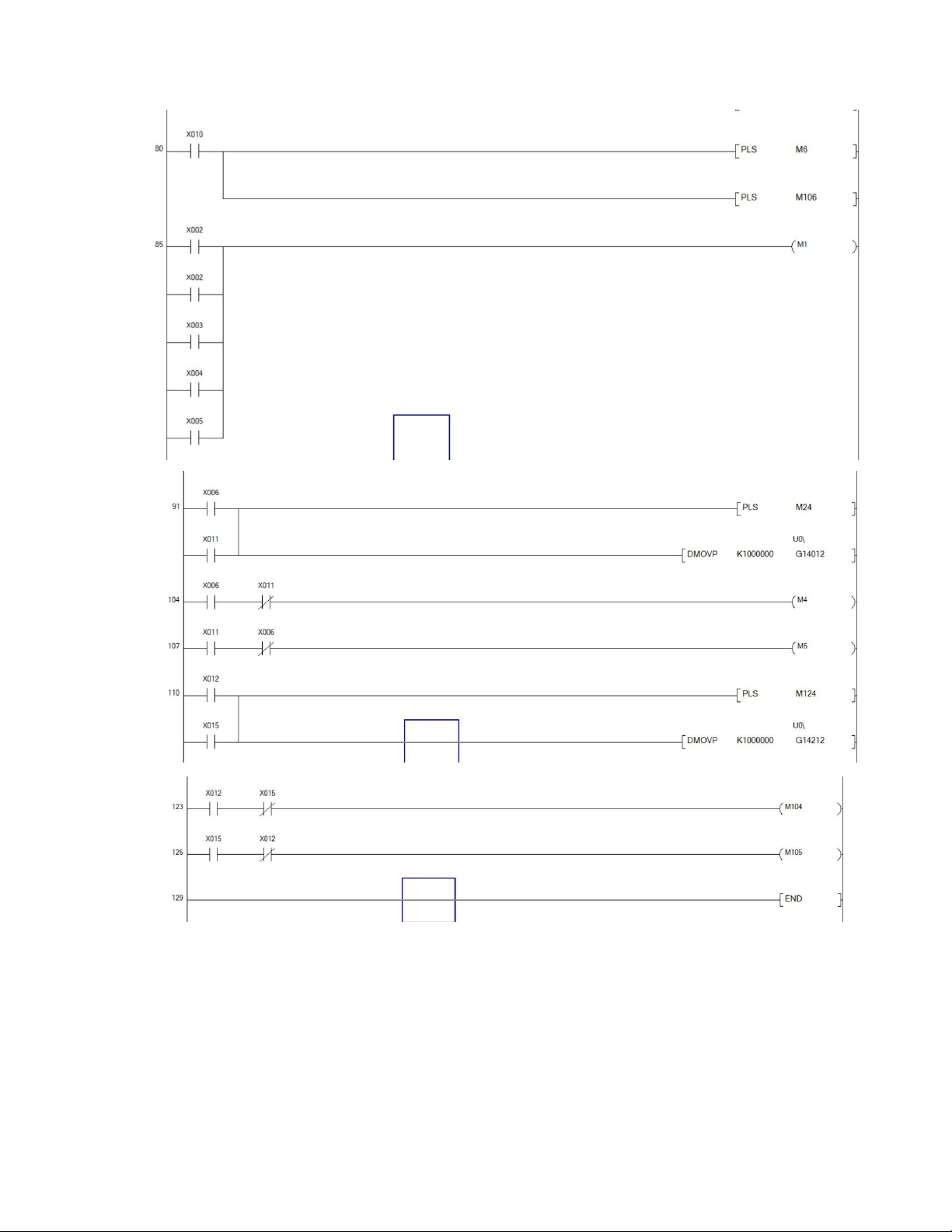
1.2.2. Viết chương trình PLC
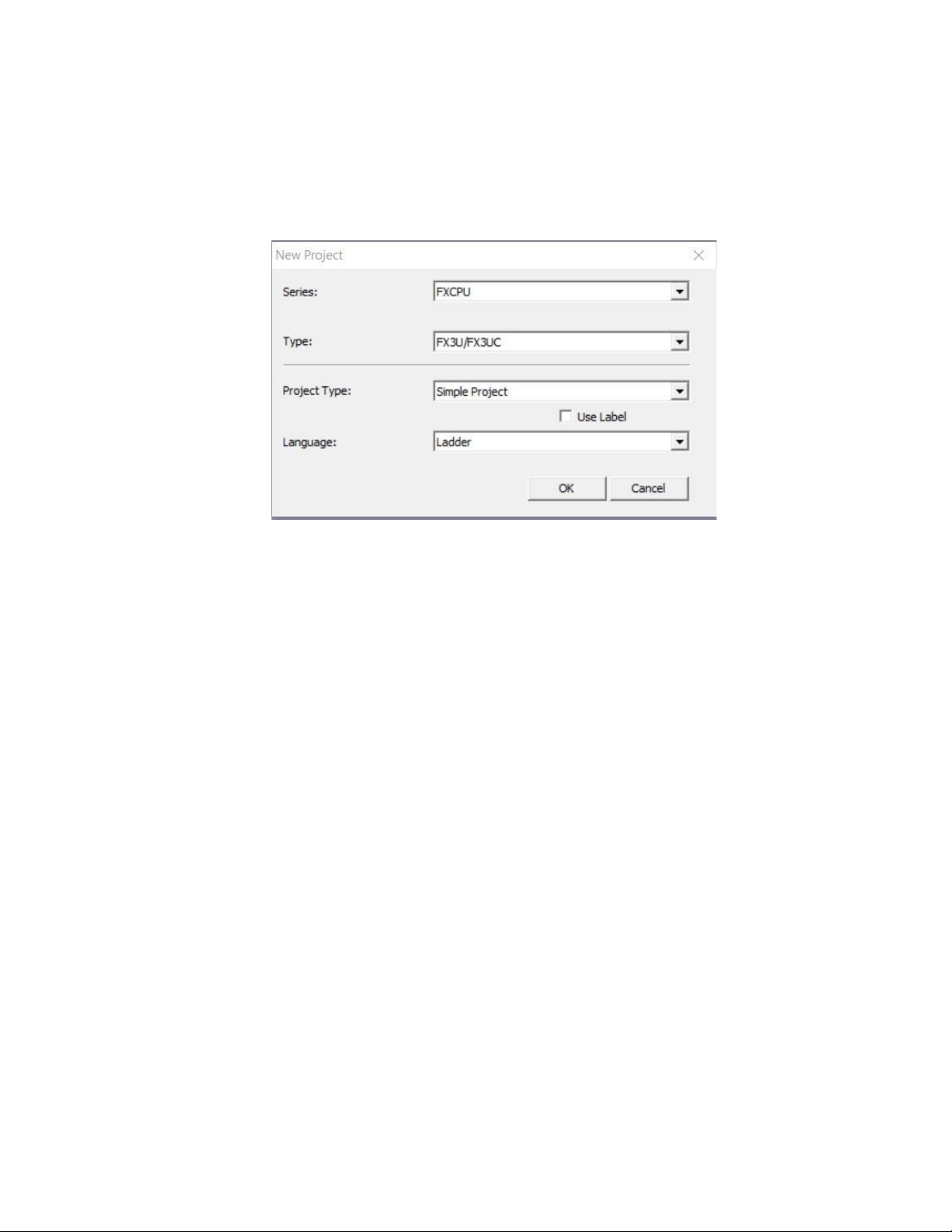
Bước 1: Mở phần mền GX Work2
Bước 2: tạo project mới: [ Project] → [ new ] hoặc click lOMoAR cPSD| 58778885 Tại Series: chọn FXCPU Tại Type: chọn FX3U/FXUC Tại Language: chọn Ladder Nhấn OK 3: Viết chương trình PLC lOMoAR cPSD| 58778885 Bước lOMoAR cPSD| 58778885
4: Nạp chương trình xuống PLC:
Tài liệu liên quan:
-

Matlab Simulation of DC Servo Motors for Control Systems | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
141 71 -

Hydraulic Servo System Overview with Mitsubishi Modules | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
127 64 -

Test 1: Servo Motor Control Loops & Feedback Strategies | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
107 54 -
Đề thi cuối học kì 1 năm học 23-24 Môn Mechatronic Servo System Control | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
135 68