dieu khien dieu toc kaplan cho nha may
Cung cap cho he thong dieu toc ve dieu toc kaplan
Môn: Truyền động điện tự động 67 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.7 K tài liệu
Tác giả:




Preview text:
Chương 1: Vai trò của hệ thống điều tốc trong hệ thống điện CHƯƠNG 1
VAI TRÒ CỦA HỆ THỐNG ĐIỀU TỐC TRONG HỆ THỐNG ĐIỆN
Quá trình sản xuất và tiêu thụ điện năng có tính chất đặc biệt so với các quá
trình khác, tính chất đặc biệt này được thể hiện thông qua sự cân bằng giữa cung
và cầu diễn ra liên tục. Điều này có nghĩa là chúng ta phải cân bằng giữa công suất
tiêu thụ phía tải và công suất phát ra của nhà máy để đảm bảo chất lượng điện năng ở mức cho phép.
Một nhiệm vụ rất quan trọng của các nhà máy phát điện là phải đảm bảo được
chỉ tiêu về chất lượng điện năng của hệ thống. Trong đó có hai chỉ tiêu đặc biệt
quan trọng là điện áp và tần số phải nằm trong dải cho phép theo quy định đó là
sai số điện áp phải nhỏ hơn 5% của điện áp định mức và sai số tần số phải nằm
trong khoảng ±2 Hz. Trong đó, điện áp mang tính chất cục bộ còn tần số mang tính
chất hệ thống. Đối với tổ máy phát điện, việc điều chỉnh điện áp đầu ra chính là
điều khiển dòng kích từ của tổ máy, còn điều chỉnh tần số chính là điều chỉnh công
suất phát của tổ máy. Đối với nhà máy thủy điện thì việc điều chỉnh công suất phát
chính là điều chỉnh công suất cơ của tuabin phát ra bằng cách điều chỉnh độ mở
cánh hướng để thay đổi lưu lượng nước qua Tuabin.
Như vậy, hệ thống điều tốc cho nhà máy thủy điện chính là hệ thống tự động
điều chỉnh công suất cơ của Tuabin thủy lực để duy trì tốc độ quay của tổ máy
trong thời gian cho phép, đồng thời đảm bảo cho tổ máy làm việc ở các chế độ
khác nhau như: chế độ điều khiển tần số, chế độ điều khiển công suất,... 1.1
Ảnh hưởng của dao động tần số đối với các thiết bị điện
Tần số của hệ thống điện là một thông số rất quan trọng trong hệ thống. Nếu
chỉ tiêu về tần số của hệ thống điện không đáp ứng được yêu cầu thì có thể sẽ gây
ra một số hậu quả xấu cho thiết bị cũng như trong sản xuất như:
Làm giảm hiệu suất làm việc của thiết bị: mỗi thiết bị được được thiết
kế và làm việc tối ưu ở một tần số định mức.
Làm ảnh hưởng xấu đến chất lượng của sản phẩm trong một số ngành như dệt, mài , tiệc,...
Gây ảnh hưởng đến tuổi thọ và vận hành ổn định của cơ cấu tuabine máy phát
Nguyên nhân dẫn đến sự thay đổi về tần số trong lưới điện là sự mất cân
bằng giữa công suất phát của nhà máy với công suất tiêu thụ phía phụ tải.
Chương 1: Vai trò của hệ thống điều tốc trong hệ thống điện 1.2
Vai trò của điều chỉnh tần số trong hệ thống điện
Tần số và điện áp là hai chỉ tiêu quan trọng nhất của chất lượng điện năng.
Mỗi một thiết bị thiêu thụ điện được thiết kế để vận hành tại một tần số và điện áp
định mức. Khi tần số của máy phát thay đổi lệch khỏi tần số định mức của nó thì
công suất tác dụng P, công suất phản kháng Q và các thông số khác của thiết bị đó
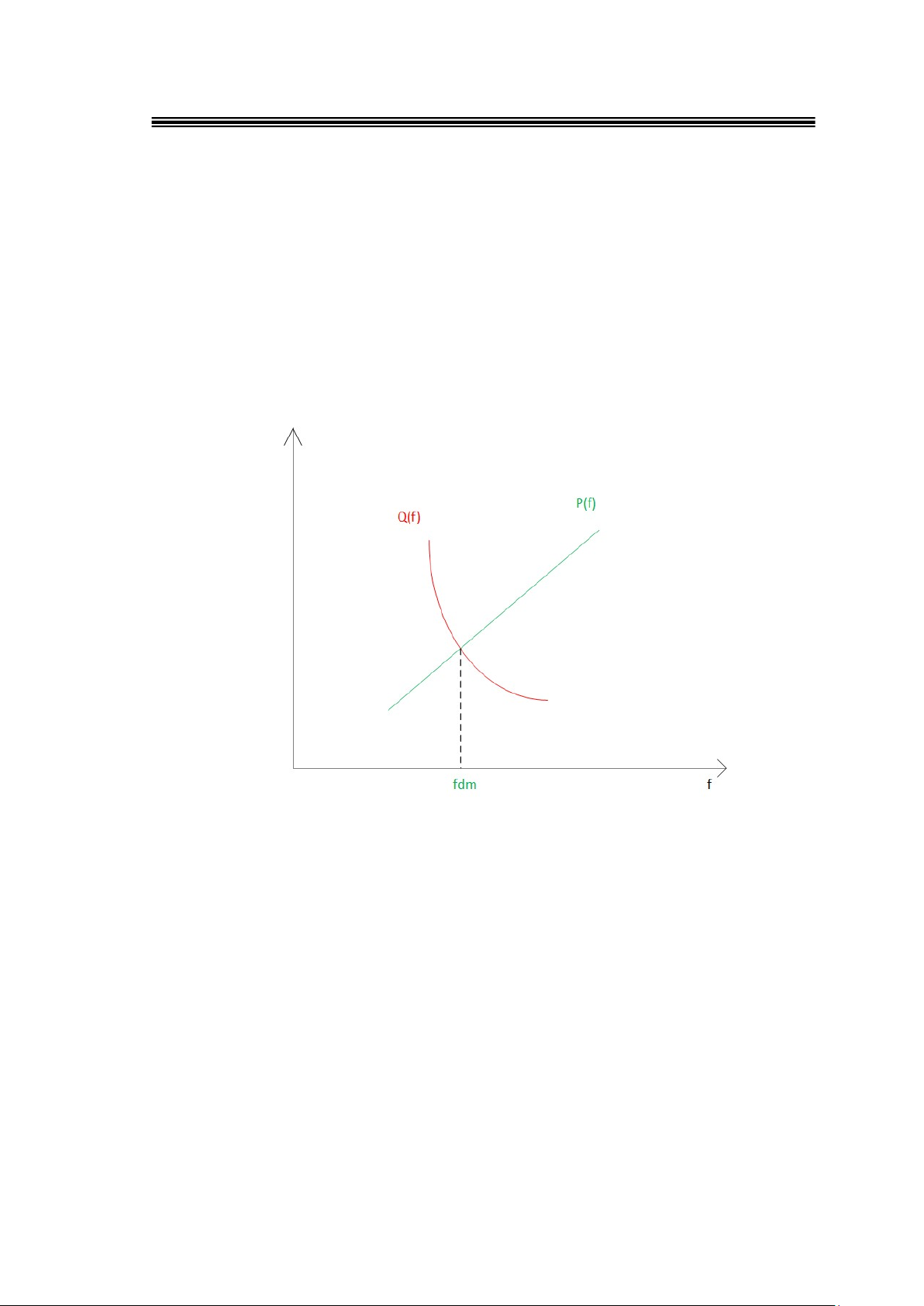
cũng thay đổi. Người ta đã xây dựng được đường đặc tính thể hiện mối quan hệ
giữa công suất tác dụng P, công suất phản kháng Q theo tần số ở một số phụ tải có
dạng như hình dưới đây:
Hình 1-1: Đặc tính phụ tải tổng hợp theo tần số Trong đó:
Đối với công suất tác dụng P, đặc tính có dạng tuyến tính. Độ dốc của
đặc tính phụ thuộc vào thành phần động cơ đồng bộ, động cơ không
đồng bộ có trong phụ tải tổng hợp đó.
o Đối với động cơ đồng bộ: Khi tần số thay đổi 1% thì P hay đổi 1%.
o Đối với động cơ không đồng bộ: khi tần số thay đổi 1% thì P thay đổi 3%
o Các lò điện trở hồ quang: P không phụ thuộc vào tần số
Đối với công suất phản kháng, tại một nút phụ tải ta có:
𝑄 = 𝑄 + ∆𝑄 − 𝑄 (1.1)
Chương 1: Vai trò của hệ thống điều tốc trong hệ thống điện Trong đó:
o 𝑄 : Công suất phản kháng mà các động cơ và máy biến áp tiêu thụ
o ∆𝑄: Tổn thất công suất phản kháng trong hệ thống
o 𝑄 : Công suất phản kháng do đường dây sinh ra
Khi tần số giảm, 𝑄 tăng, ∆𝑄 và 𝑄 tăng. Đối với một nút phụ tải, khi tần số
suy giảm 1% thì Q tăng 1-5%.
Ngoài ra, sự thay đổi tần số của hệ thống cũng có một phần ảnh hưởng đến
điện áp, nhờ vậy khi hệ thống thiếu công suất phản kháng làm điện áp suy giảm,
có thể giảm bớt độ sụp giảm điện áp bằng cách tăng tần số lên.
Qua đó, chúng ta thấy được vai trò quan trọng của tần số trong hệ thống điện,
nó có ảnh hưởng trực tiếp đến các thiết bị sử dụng điện, do đó việc giữ tần số ổn
định tại một giá trị cố định (sai số trong dải cho phép) là một yêu cầu cực kỳ quan
trọng trong hệ thống điện.
Như đã nói ở trên, điện áp mang tính cục bộ còn tần số mang tính hệ thống
có nghĩa là tần số sẽ như nhau tại mọi điểm trên hệ thống và việc điều khiển tần số
của lưới điện chỉ thực hiện tại các nhà máy phát điện. Quá trình điều chỉnh tại các
nhà máy phát điện để duy trì tần số ở một giá trị được gọi là điều tốc. Vì vậy hệ
thống điều tốc là một trong những thiết bị quan trọng trong dây chuyền sản xuất điện năng. 1.3
Cở sở lý thuyết về điều tốc 1.3.1 Cơ sở toán học
Tần số dòng điện của máy phát được xác định theo biểu thức : 𝑛 ∗ 𝑝 𝑓 = (𝐻𝑧) (1.2) 60 Trong đó: f : Tần số (Hz)
n : Tốc độ quay của rotor máy phát (v/p)
p: Số đôi cực của máy phát
Trong thực tế, số đôi cực của máy phát là thông số không thể thay đổi nên
việc điều khiển tần số sẽ được thông qua điều khiển thông số tốc độ quay của máy phát.
Rotor của máy phát được nối đồng trục với trục của tuabin. Dưới tác dụng
của dòng nước làm quay tuabine của máy phát do đó làm quay rotor. Dưới đây là
phương trình động lực học trên trục tuabin của máy phát là:
Chương 1: Vai trò của hệ thống điều tốc trong hệ thống điện 𝑑𝑤 (1.3) 𝑀 − 𝑀 = 𝐽 ∗ 𝑑𝑡 Trong đó:
𝑀 : Momen tuabin (N.m), Momen này do dòng nước chạy qua tuabin sinh ra
𝑀 : Momen cản ( N.m) trên trục động cơ của máy phát. Momen này
sinh ra do ma sát, momen điện từ ( momen do dòng điện chạy trong
stator sinh ra). Momen này thay đổi theo phụ tải điện
𝐽 : Momen quán tính của tổ máy quy về trục động cơ
𝑤: Tốc độ góc của rotor máy phát: 𝑛 ∗ 𝑝 𝑟𝑎𝑑 (1.4) 𝑤 = 2 ∗ 𝜋 ( ) 60 𝑠
Từ phương trình 1.3, ta thấy khi tốc độ quay của rotor không thay đổi thì: 𝑑𝑤 (1.5) = 0 𝑑𝑡
Thay 1.5 vào phương trình 1.3, ta có: 𝑀 = 𝑀 (1.6)
Như vậy, để giữ tốc độ của tuabin không đổi ta phải điều khiển momen của
tuabin bằng momen cản hay công suất phát bằng công suất tiêu thụ (P=M*w). Do
tính chất đặc biệt của hệ thống điện, công suất phụ tải thay đổi liên tục nên muốn
đảm bảo tần số không đổi, chúng ta phải liên tục thay đổi công suất phát của tổ
máy sao cho cân bằng với phía phụ tải.
Công suất của tuabin thủy lực do dòng nước cung cấp được xác định qua phương trình 1.7:
𝑃 = 9,81 ∗ 𝑄 ∗ 𝐻 ∗ 𝜂 (𝑘𝑊) (1.7) Trong đó:
P : Công suất của tuabin (kW)
Chương 1: Vai trò của hệ thống điều tốc trong hệ thống điện
𝜂 : Hiệu suất sử dụng cột nước của Tuabin
𝑄: Lưu lượng dòng nước chạy qua tuabin (𝑚 /𝑠)
𝐻: Chiều cao cột nước hiệu dụng (m)
Từ phương trình 1.7 bên trên, ta có thể thay đổi các thông số P,Q và 𝜂 để thay
đổi công suất cơ của tuabin. Nhưng phương pháp hiệu quả và dễ dàng nhất là thay
đổi lưu lượng chảy qua tuabin để thay đổi công suất cơ của tuabin.
Lưu lượng Q của một dòng nước qua tiết diện S được xác định theo phương trình 1.8:
𝑄 = 𝑣 ∗ 𝑆 (𝑚 /𝑠) (1.8) Trong đó:
v: Vận tốc dòng chảy qua tiết diện S (m/s)
S: tiết diện ngang của đường ống (𝑚 )
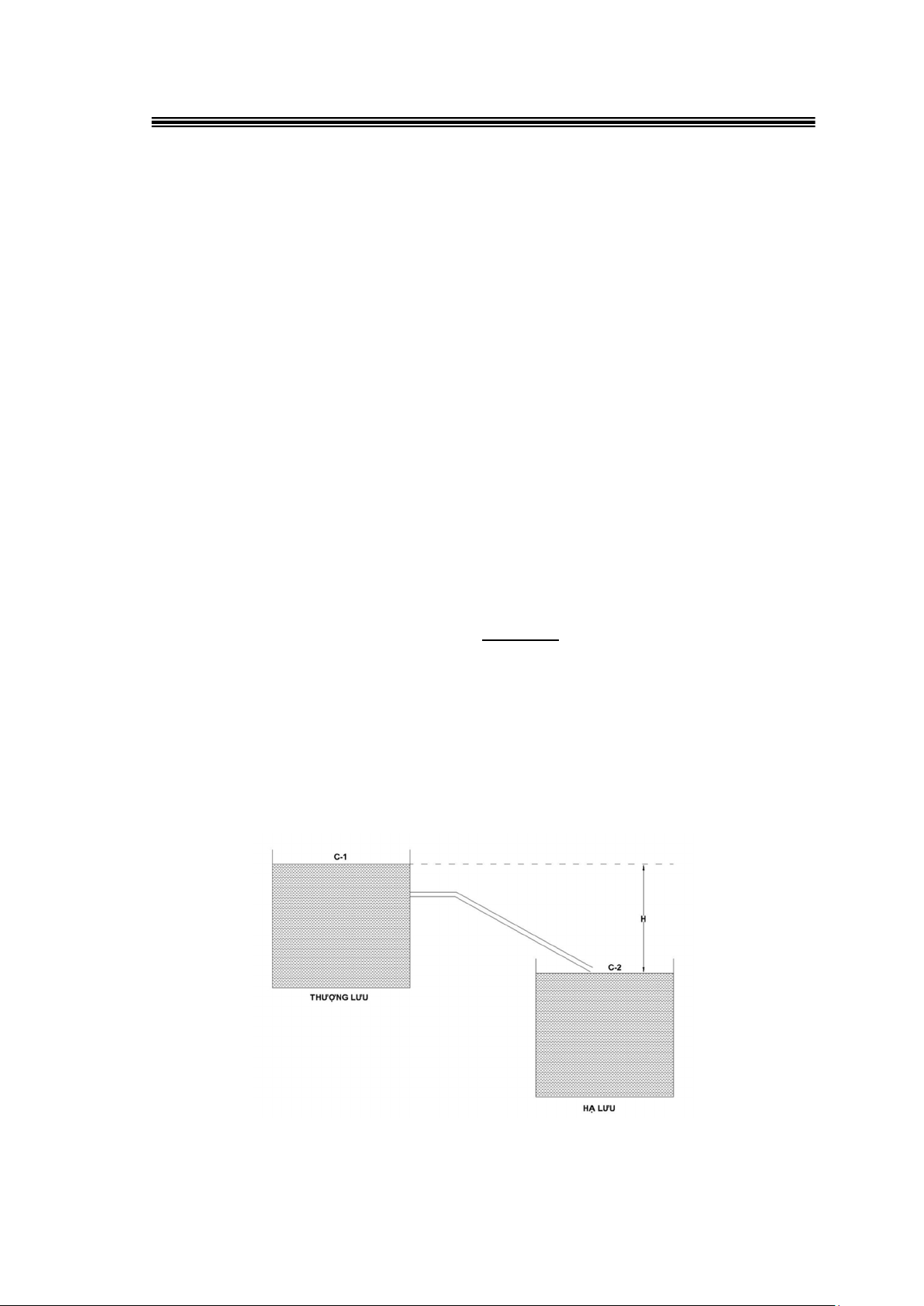
Vận tốc dòng nước được tính theo phương trình 1.9: 𝑣 = 2 ∗ 𝑔 ∗ 𝐻 (1.9) Trong đó:
H : Độ cao cột nước, nó mô tả chênh lệch giữa mực nước hồ phía
thượng lưu so với hạ lưu (như hình 1-2)
v : Vận nước dòng chảy khi ra khỏi đường ống
Hình 1-2: Độ cao cột nước H
Xây dựng phương trình Becnuli cho mặt cắt C-1 và mặt cắt C-2 với giả thiết
bỏ qua tổn thất và coi nước là chất lỏng lý tưởng, ta có:
Chương 1: Vai trò của hệ thống điều tốc trong hệ thống điện 𝑣 𝑝 𝑣 𝑝 (1.10) + + 𝑧 = + + 𝑧 2 ∗ 𝑔 𝛾 2 ∗ 𝑔 𝛾 Trong đó:
𝑝 = 𝑝 = 𝑝 : Áp suất khí trời
𝑣 = 0 : do thể tích của hồ chứa là rất lớn so với lưu lượng xả của nhà máy
𝛾 : Trọng lượng riêng của nước
𝑧 = 𝑧 : Độ cao mặt đang xét so với mặt quy chiếu
Thay các dữ liệu trên vào phương trình 1.10, ta được: 𝑝 𝑣 𝑝 (1.11) 0 + + 𝑧 = + + 𝑧 𝛾 2 ∗ 𝑔 𝛾
𝑣 = 2 ∗ 𝑔 ∗ (𝑧 − 𝑧 )=2*g*H (1.12) 𝑣 = 2 ∗ 𝑔 ∗ 𝐻 (1.13)
Vì độ cao cột nước H hầu như không đổi trong khoảng thời gian xét nên vận
tốc dòng nước chảy qua Tuabin được coi như là không đổi.
Vậy để điều chỉnh lưu lượng Q, chúng ta phải thay đổi tiết diện của dòng
chảy. Và cũng tùy vào loại tuabin được sử dụng mà có những biện pháp điều chỉnh
lưu lượng khác nhau. Đối với tuabin tâm trục người ta sẽ thay đổi độ mở cánh
hướng nước và góc quay của bánh xe công tác. Còn đối với tuabin cánh gáo người
ta vừa điều khiển kim phun và vừa điều khiển cánh hướng dòng.
Như vậy, bản chất của việc điều tốc cho tuatin thủy lực chính là điều chỉnh
lưu lượng nước vào tuabin để giữ cho tốc độ qua của tuabin không đổi khi phụ tải thay đổi.
1.3.2 Đặc tính điều chỉnh của tuabin
Phương trình đặc tính điều chỉnh của tuabin biểu diễn mối quan hệ giữa tần
số đối với công suất tác dụng của tổ máy:
(𝑓 − 𝑓) + 𝐵 ∗ (𝑃 − 𝑃) = 0 (1.14)
𝑓 = 𝑓 + 𝐵 ∗ (𝑃 − 𝑃) (1.15)
Chương 1: Vai trò của hệ thống điều tốc trong hệ thống điện Trong đó: 𝑓 : Tần số Hz
𝑓 = 50𝐻𝑧 : Tần số định mức
𝑃: Công suất phát của tổ máy
𝑃 : Công suất đặt
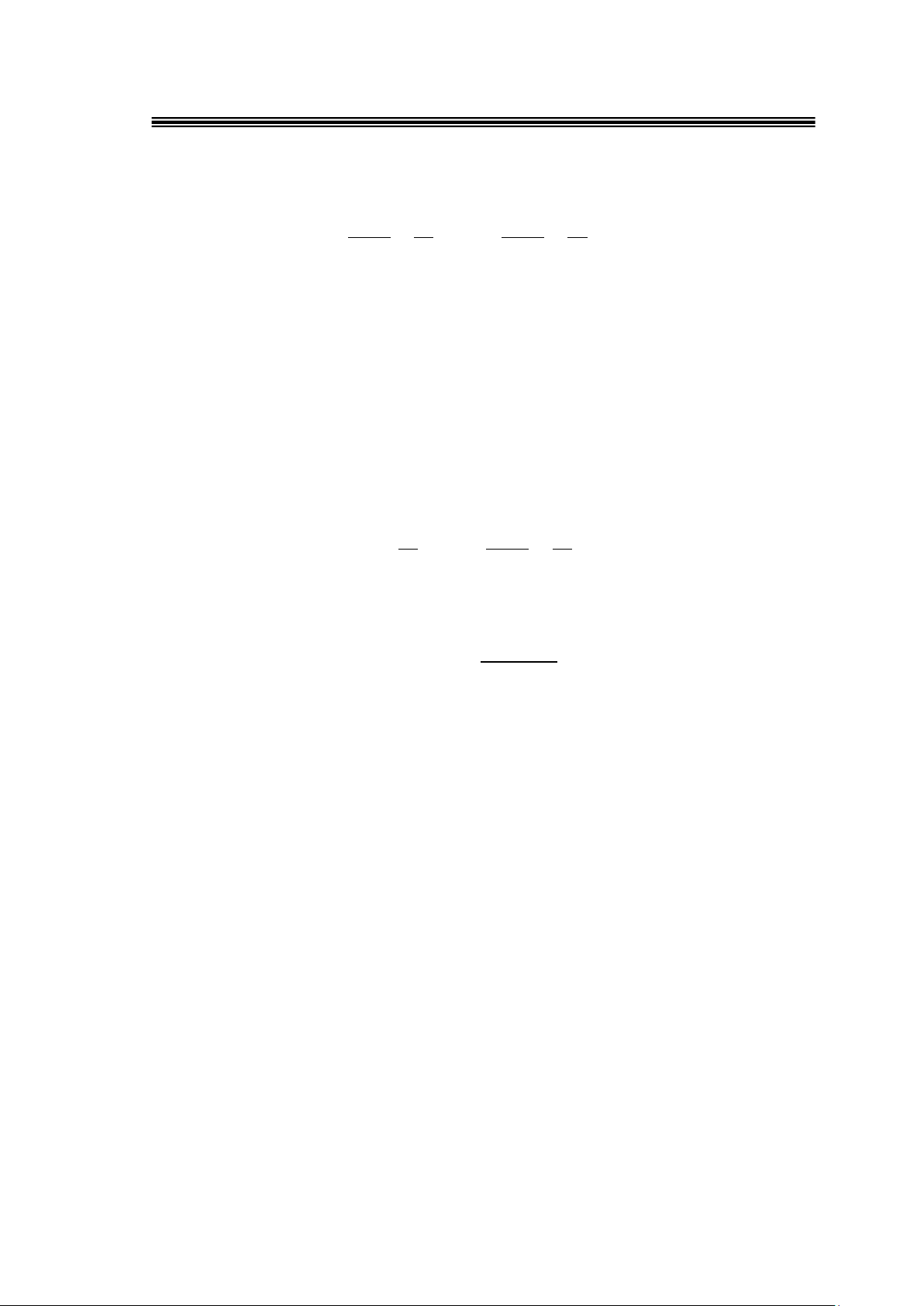
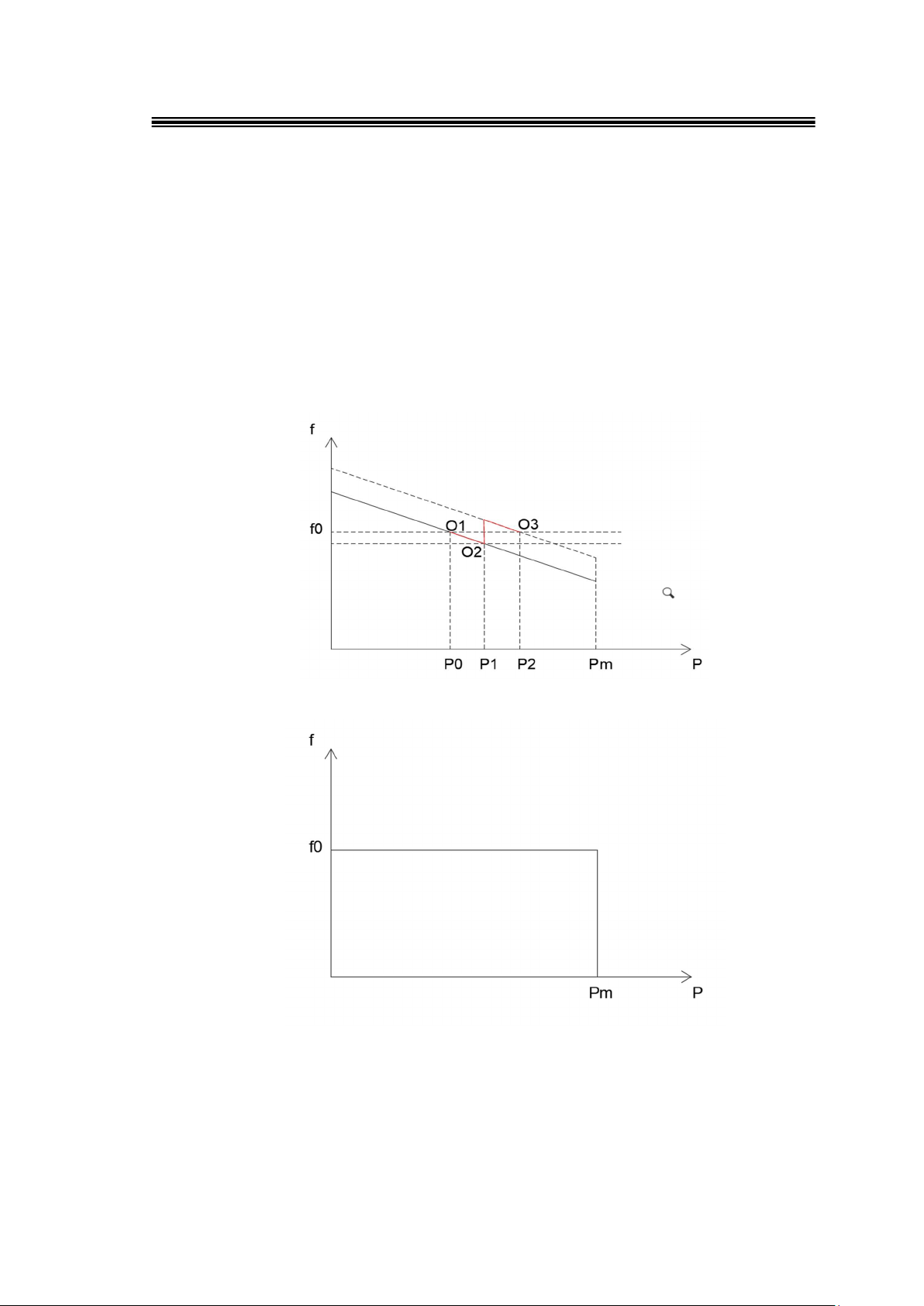
Hình 1-3 và hình 1-4 lần lượt là các dạng đặc tính điều chỉnh tĩnh và điều chỉnh phiếm định: Hình 1-3: Đặc tính tĩnh
Hình 1-4: Đặc tính phiếm định
Độ giảm tốc thường xuyên của đặc tính điều chỉnh được định nghĩa theo
phương trình dưới đây:
Chương 1: Vai trò của hệ thống điều tốc trong hệ thống điện ∆𝑓 (1.16) 𝑓 𝐵 = (%) ∆𝑃 𝑃
Khi 𝐵 càng nhỏ thì sự tham gia của nhà máy vào quá trình điều khiển tần số
càng lớn. Khi 𝐵 = 0, thì đặc tính có dạng phiếm định như hình 1-4.
Quá trình điều chỉnh của tuabin gồm 2 giai đoạn: Điều chỉnh sơ cấp
Điều chỉnh thứ cấp
1.3.2.a Điều chỉnh sơ cấp
Điều chỉnh sơ cấp là quá trình tăng công suất phát của nhà máy lên khi tần
số giảm. Kết thúc quá trình điều chỉnh sơ cấp, tần số phát vẫn thấp hơn tần số định
mức của hệ thống, do lượng công suất phát lên vẫn chưa hoàn toàn bù hết được
phần phụ tải tăng thêm. Theo đường được tô màu đỏ trên hình 1-3, thì khi phụ tải
tăng công suất phát sẽ tăng từ P0 sang P, có nghĩa là điểm làm việc sẽ di chuyển
từ O1 sang điểm làm việc O2 và tần số phát lúc này của nhà máy đang thấp hơn
tần số định mức. Từ phương trình 1.16, ta sẽ xác định được độ tăng công suất phát
của nhà máy ứng với độ giảm tần số ∆𝑓: ∆𝑓 (1.17) 𝑓 ∆𝑃 = ∗ 𝑃 (𝑘𝑊) 𝐵
1.3.2.b Điều chỉnh thứ cấp
Điều chỉnh thứ cấp chính là quá trình đặt lại công suất phát của nhà máy hay
thay đổi đường đặc tính điều chỉnh. Khi đặt lại công suất đặt của nhà máy thì đường
đặc tính điều chỉnh là đường nét đứt ( bên trên đường đặc tính ban đầu) và điểm
làm việc mới sẽ hội tụ về điểm O3.
Từ phương trình đặc tính điều chỉnh của Tuabin, ta thấy rằng 𝑓 luôn không
đổi (𝑓 = 50𝐻𝑧), do đó để thay đổi đường đặc tính điều chỉnh (điều chỉnh thứ cấp)
chính là đặt lại công suất đặt của nhà máy. Sau 2 giai đoạn điều chỉnh sơ cấp và
thứ cấp thì công suất phát của nhà máy sẽ tăng lên và giữ ổn định tần số ở giá trị
định mức. Quá trình điều chỉnh sơ cấp được thực hiện tại các nhà máy còn quá
trình điều thứ cấp sẽ thực hiện tại các nhà máy có công suất lớn.
Trong thực tế, quá trình điều chỉnh sơ cấp và thứ cấp xảy ra đồng thời. Khi
phụ tải các hệ thống tăng lên thì tất cả các nhà máy sẽ tự động tăng công suất phát
của mình lên. Sau đó các nhà máy có công suất lớn sẽ đặt lại đường đặc tính điều
Chương 1: Vai trò của hệ thống điều tốc trong hệ thống điện
chỉnh để bù lại phần phụ tải tăng, lúc này các nhà máy nhỏ sẽ quay về công suất
định mức và tần số của hệ thống ở giá trị định mức.
1.3.3 Quá trình điều chỉnh tần số theo phụ tải
Để xem xét quá trình điều chỉnh tần số theo phụ tải ở các nhà máy điện, ta sẽ
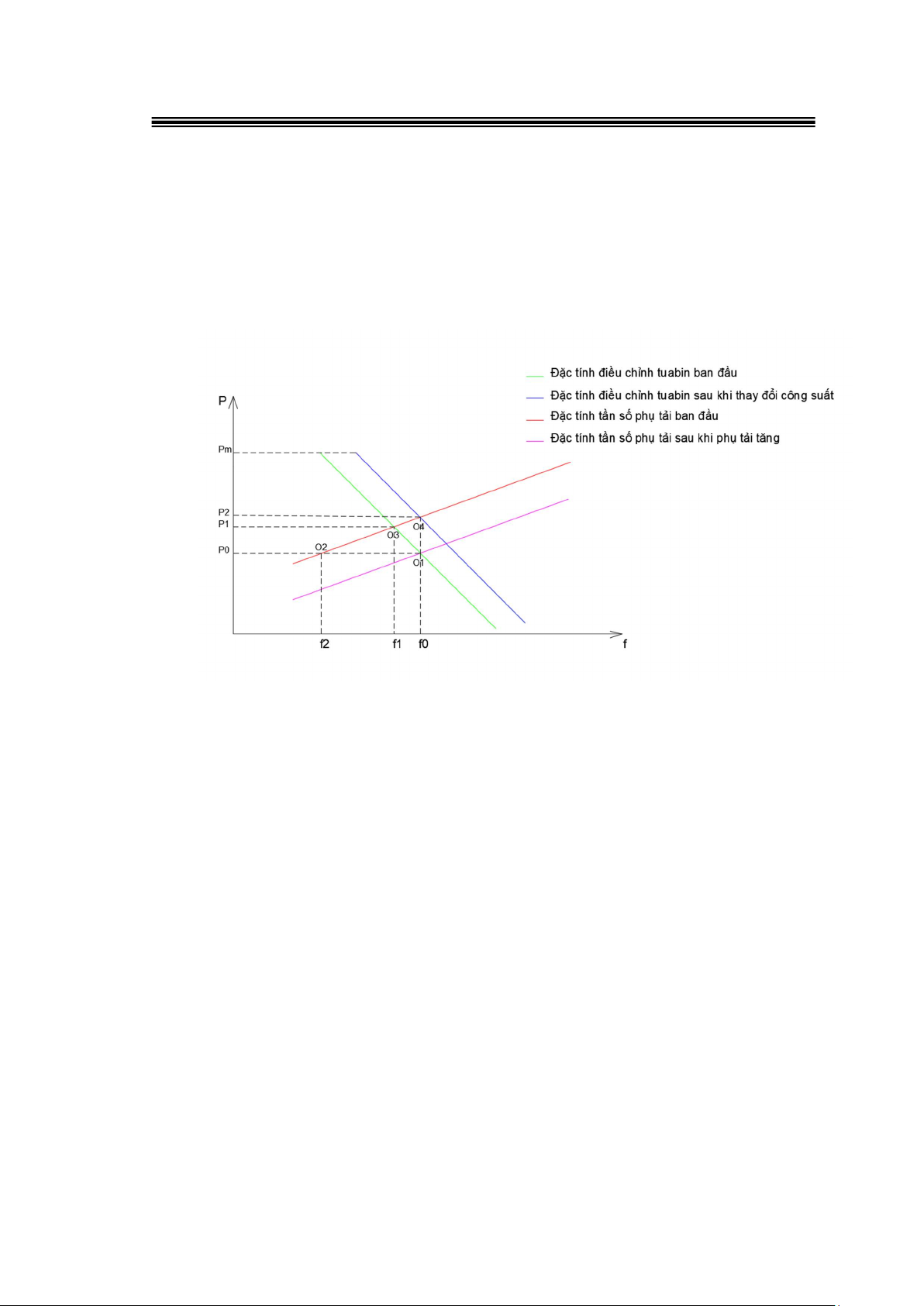
xem xét hình 1-5 dưới đây:
Hình 1-5: Quá trình điều chỉnh tần số theo phụ tải
Quan sát trên hình 1-5 ta sẽ thấy điểm làm việc ban đầu của hệ thống sẽ là
O1 tương ứng với công suất phát và tần số lần lượt là P0 và f0. Sau đó phụ tải tăng
1 lượng công suất ∆𝑃 = 𝑃2 − 𝑃1 , tương ứng với sự dịch chuyển đường đặc tính
tần số-phụ tải từ đường màu tím lên đường màu đỏ. Tại thời điểm ban đầu, do công
suất phát của nhà máy không thể tăng 1 cách đột ngột lên tần số của hệ thống lúc
này sẽ giảm xuất tần số f2 tương ứng với điểm làm việc O2. Sau một thời gian, hệ
thống sẽ tiến tới điểm làm việc cân bằng O3, lúc này tần số của hệ thống là f1và công suất phát là P1. Nguyên nhân tần số lúc này của hệ thống vẫn nhỏ hơn tần
số của hệ thống là do công suất phát của nhà máy không bù hết được phần công
suất mà phía phụ tải tăng thêm. Điều này có nghĩa là ta phải tăng công suất phát
của nhà máy lên để bù hoàn toàn công suất mà phía phụ tải tăng thêm để đưa tần
số của hệ thống về giá trị định mức. Công việc này được thực hiện bằng cách đặt
lại đường đặc tính điều chỉnh của tuabin từ đường màu xanh lá cây lên đường màu
xanh da trời. Sau một khoảng thời gian sau khi đặt lại đường đặc tính điều chỉnh
của tuabin điểm làm việc sẽ dịch chuyển về điểm O4 tương tứng với tần số định
mức f0 và công suất phát P2 (đã bù được hoàn toàn phần công suất tăng lên của phụ tải).
Chương 1: Vai trò của hệ thống điều tốc trong hệ thống điện
1.3.4 Quá trình thay đổi công suất đặt của tổ máy
Mỗi tổ máy của nhà máy thường có khả năng đặt mức công suất phát tại nhiều
giá trị khác nhau. Khi tổ máy đang làm việc, nếu muốn thay đổi lượng công suất
phát ra thì phải đảm bảo rằng trong quá trình tăng công suất phát đó tần số chỉ
được phép dao động trong một dải cho phép. Bây giờ để xem xét kỹ hơn về quá
trình thay đổi này, chúng ta sẽ quan sát hình 1-6 dưới đây:
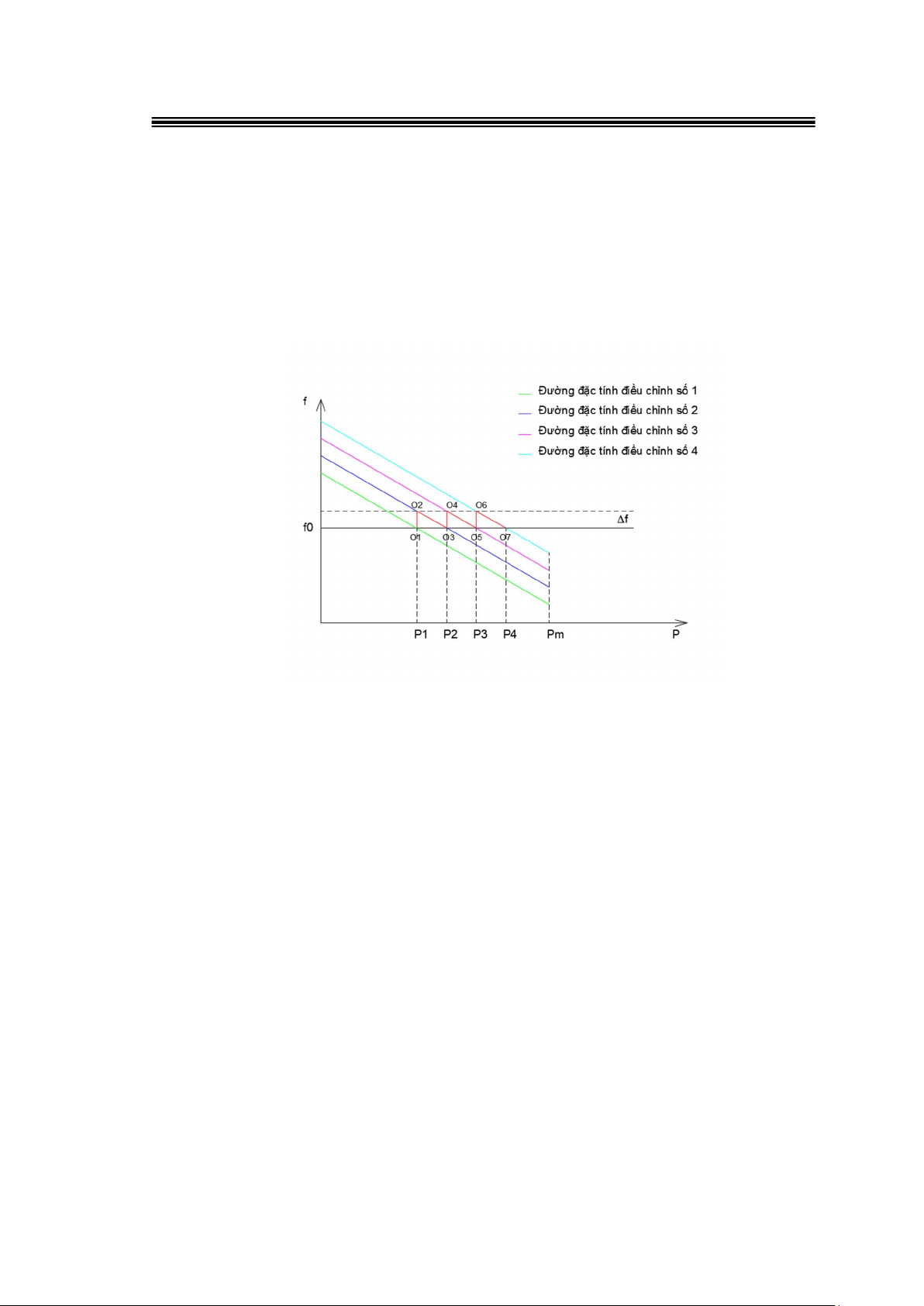
Hình 1-6: Quá trình thay đổi công suất đặt của tổ máy
Điểm O1 là điểm làm việc ban đầu của tổ máy ứng với công suất P1 và tần
số định mức f0. Khi cần nâng công suất phát của tổ máy lên giá trị P4 thì đường
đặc tính điều chỉnh của tuabin không thể chuyển sang ngay đường số 4 được do
dao động tần số sẽ vượt ra ngoài dải cho phép. Ý tưởng lúc này là chúng ta sẽ tăng
công suất đặt lên giá trị P2=P1+∆𝑃 khi đó đường đặc tính sẽ chuyển từ đường số
1 sang đường đặc tính số 2 mà vẫn đảm bảo dao động tần số nằm trong dải cho
phép. Quá trình tăng công suất đặt với bước nhảy công suất đặt là ∆𝑃 cho đến khi
đạt giá trị P4 tương ứng với đường đặc tính điều chỉnh số 4. Lúc này quá trình đặt
lại công suất từ P1 sang P4 hoàn tất. Như vậy quá trình đặt lại công suất phát của
tổ máy thực chất là quá trình đặt lại liên tiếp các đường đặc tính kế tiếp nhau.
Chương 2: Giới thiệu tổng quan hệ Kaplan Turbine – Máy phát thủy điện CHƯƠNG 2
GIỚI THIỆU TỔNG QUAN HỆ KAPLAN
TURBINE – MÁY PHÁT THỦY ĐIỆN
Nội dung của chương 2 này sẽ giới thiệu tổng quan về các thành phần chính
của hệ tuabin – máy phát Kaplan. Bắt đầu từ cửa nước đầu vào đến khâu chuyển
năng lượng động năng của nước thành năng lượng điện. Hệ Tuabin – máy phát
được chia nhỏ thành các 3 khâu nhỏ hơn: đường hầm dẫn nước (penstock), tuabin
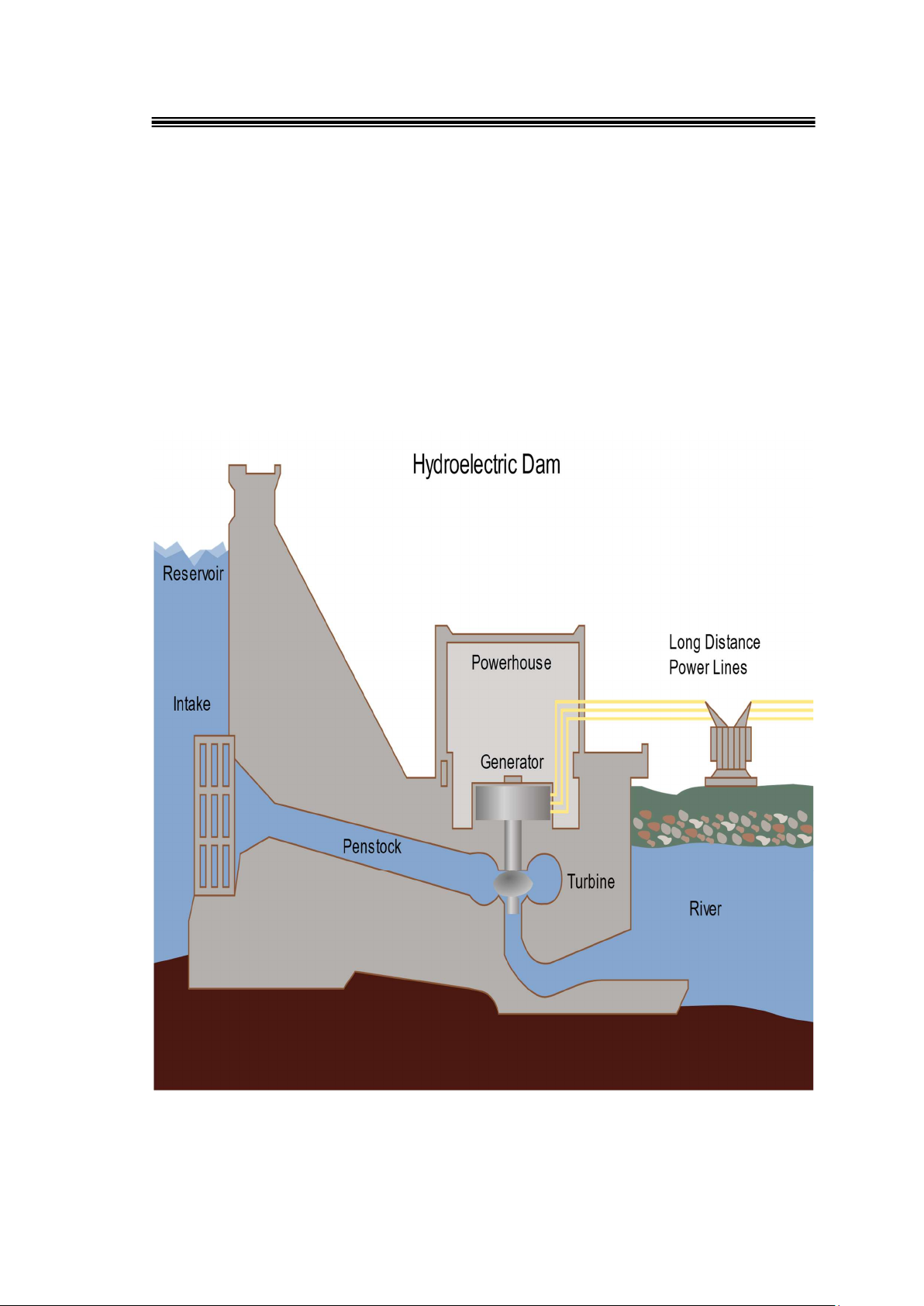
và máy phát. Hình 2-1 là mô tả cấu trúc của một nhà máy thủy điện.
Hình 2-1: Mô hình cấu trúc nhà máy thủy điện 2.1 Tuabin Kaplan – Máy phát
Tuabin Kaplan là một trong những kiểu tuabin được sử dụng phổ biến nhất
trong các nhà máy thủy điện. Nguyên nhân cho sự phổ biến đó nằm ở hiệu suất
Chương 2: Giới thiệu tổng quan hệ Kaplan Turbine – Máy phát thủy điện
biến đổi mà nó mang lại, nó có thể làm việc trong một dải làm việc rộng và với độ
thay đổi cột nước cao nhưng vẫn mang lại hiệu suất cao. Tuabin Kaplan là kiểu
tuabin hướng trục, trong đó áp suất trong buồng tuabin sẽ cao hơn áp suất của khí
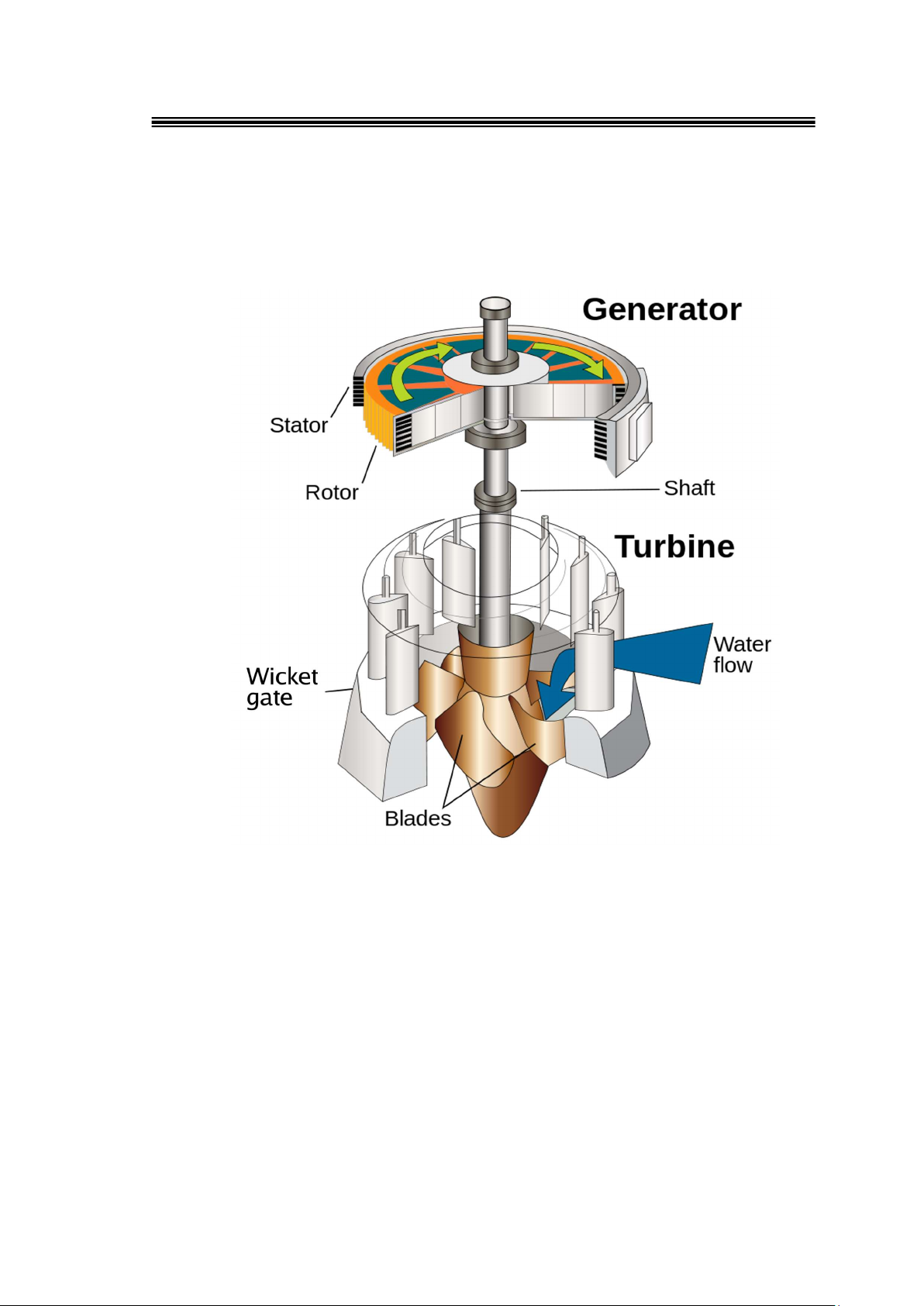
quyển. Hình 2-2 mô tả cấu trúc hệ tuabin Kaplan và máy phát:
Hình 2-2: Mô hình cấu trúc hệ tuabin Kaplan – máy phát
Dòng nước được lấy từ cửa nước của nhà máy rồi đi qua cánh hướng (wicket
gate). Hệ thống cánh hướng (Wicket gate) là một cơ cấu cơ khí cho phép có thể di
chuyển và điều khiển được. Hệ thống cánh hướng này được thiết kế với mục đích
điều khiển lưu lượng nước chảy vào tuabin. Dòng nước sau khi qua bánh xe công
tác sẽ chảy xoáy trong buồn của tuabin và chính kết cấu cơ khí của cánh hướng
cũng làm cho những đặc tính của dòng chảy tốt lên. Tiếp theo dòng nước chảy
xoắn sẽ va chạm vào bánh xe công tác (Runer Blade). Điểm đặc biệt của tuabin
Kaplan là cơ cấu cánh tuabin có thể di chuyển và điều khiển được. Mục đích chính
của thiết kế này là làm nâng cao hơn hiệu suất chuyển đổi năng lượng. Sau khi
nước chảy qua cánh tuabin, áp suất dòng dòng nước sẽ chuyển thành động năng
làm quay tuabin. Kết cấu hình dáng của cánh hướng sẽ giúp nâng cao tốc độ dòng
chảy với một tổn thất rất nhỏ. Áp suất cao của dòng nước trong buồng xoắn của
tuabin va chạm với cánh tuabin để thoát ra ngoài và năng lượng dòng nước đó
Chương 2: Giới thiệu tổng quan hệ Kaplan Turbine – Máy phát thủy điện
được truyền vào trục của tuabin. Về mặt lý thuyết, nếu quá trình chuyển đổi đó đạt
hiệu suất 100% tức là toàn bộ động năng của dòng nước được chuyển hóa hết thành
động năng quay tuabin và tốc độ dòng nước sau khi ra khỏi tuabin sẽ phải bằng 0.
Nhưng trong thực tế sau khi ra khỏi tuabin dòng nước vẫn phải tiếp tục di chuyển
về phía hạ lưu, do đó động năng của dòng nước chỉ giảm đi một lượng nào đó và
hiệu suất chuyển đổi không thể đạt 100%.
2.1.1 Cánh hướng và bánh xe công tác
Điểm đặc biệt của tuabin Kaplan so với các kiểu tuabin khác chính là nằm ở
hệ thống cánh hướng và bánh xe công tác đều có thể di chuyển và điểu khiển được.
Việc phối hợp điều khiển 2 cơ cấu này nhằm tăng hiệu suất chuyển đổi của tuabin.
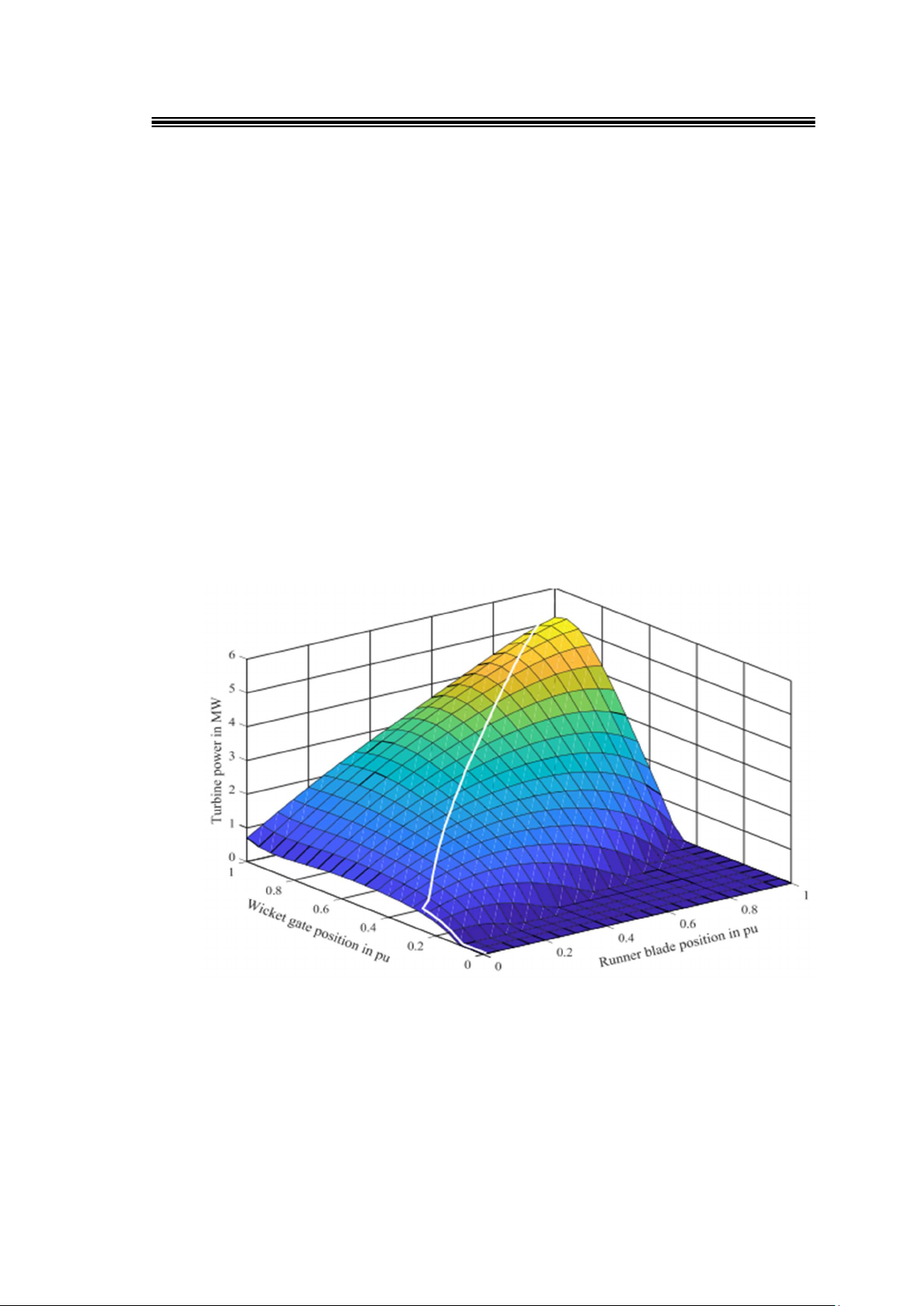
Với mỗi vị trí của cánh hướng, thì sẽ tương tương ứng với một vị trí của tuabin.
Vị trí bánh xe công tác được chọn sao cho nâng cao tối đa công suất nhận được
với cùng một lưu lượng đi vào tuabin, điều đó được thể hiện thông qua hình 2-3 dưới đây:
Hình 2-3: Đặc tính Tuabin Kaplan ứng với độ cao cột nước 7.5m
Các cánh hướng được sử dụng để điều chỉnh lưu lượng nước chảy vào buồng
tuabin và chúng được gắn trên một vòng tròn cơ khí (wicket gate ring), như hình
2-4 a). Vị trí cánh hướng 𝛾 ∈ [0 1] p.u, trong đó 𝛾 = 1 𝑝. 𝑢 = 60° tương ứng với
trạng thái mở hoàn toàn của cánh hướng và 𝛾 = 0 𝑝. 𝑢 = 0°tương ứng với trạng
thái đóng hoàn toàn. Vị trí cánh hướng 𝛼 = [0 1] p.u tương ứng với giá trị thực
nằm trong khoảng [2.5° 32.5°].
Chương 2: Giới thiệu tổng quan hệ Kaplan Turbine – Máy phát thủy điện
Hình 2-4: a) Cấu trúc cánh hướng nhìn từ trên xuống.
b) Định nghĩa vị trí cánh hướng. c) Định nghĩa trí cánh tuabin 2.2 Servomotor
Trong thực thế, Servo thủy lực được sử dụng để điều khiển vị trí cơ cấu cánh
hướng nước và cơ cấu bánh xe công tác. Hình 2-5 là một servomotor trong thực tế. Hình 2-5: Servomotor
Vị trí cánh hướng cánh hướng được điều chỉnh bằng cách quay cơ cấu vòng
bi nơi mà các cánh hướng được cố định. Một vấn đề quan trọng khi chúng ta nghiên
cứu đến vấn đề điều tốc là thời gian đóng mở của cơ cấu cánh hướng và cánh
tuabin. Việc điều chỉnh vị trí cánh hướng từ mở hoàn toàn sang vị trí đóng hoàn
toàn thông thường sẽ mất khoảng 5-15 giây. Ngoài các giới hạn vật lý của bản thân
servomotor, chúng ta cũng cần phải giới hạn tốc độ để giữ cho áp suất nước trong
đường ống trong một dải cho phép. Còn việc điều chỉnh vị trí bánh xe công tác từ
đầu hành trình tới cuối hành trình thường mất tầm khoảng 30-60 giây.
Chương 2: Giới thiệu tổng quan hệ Kaplan Turbine – Máy phát thủy điện 2.3
Hầm dẫn nước ( Penstock)
Hầm dẫn nước là một hệ thống dẫn nước từ cửa lấy nước của nhà máy vào
trong tuabin. Về lý thuyết thì lượng năng lượng lớn nhất mà tuabin có thể phát
được xác định bằng độ cao cột nước. Nhưng thực tế lượng năng lượng này lại bị
ảnh hưởng bởi tổn hao do mát sát với thành ống dẫn và đặc tính động học của nước.
Hơn nữa, cũng tồn tại một vài dạng tổn thất động năng trong tuabin. Trong
điều kiện lý tưởng thì tốc độ của dòng nước sau khi ra tuabin sẽ bằng 0, nghĩa là
toàn bộ động năng của dòng nước được chuyển đổi hoàn thành động năng của trục
tuabin. Nhưng điều đó là không thực tế, vì dòng nước sau khi ra khỏi tuabin cần
phải chảy về phía hạ lưu.
Các đặc tính động học của hầm dẫn nước liên quan trực tiếp tới mức quán
tính của nước. Khi tuabin đang làm việc ở trạng thái ổn định thì hầm dẫn không có
ảnh hưởng gì đến đặc tính động học của tuabin. Nhưng một khi có sự thay đổi về
nhu cầu công suất bên phía phụ tải điện, hệ thống điều tốc sẽ điều khiển đóng mở
cánh hướng khi đó thì chúng ta sẽ nhận thấy ảnh hưởng của hầm dẫn nước đến đặc
động học của tuabin. Trong trường hợp nhu cầu công suất phía phụ tải tăng thì bộ
điều tốc sẽ điều khiển cánh hướng mở rộng ra để tăng lưu lượng đi vào tuabin.
Nhưng chính lúc này, áp suất nước trong đường ống sẽ bị sụp đi nhanh chóng do
lượng nước trong đường ống bị suy giảm nhanh chóng nhưng do quán tính của
nước và kết cấu hầm dẫn nước mà lượng nước đó không thể bù lại ngay được.
Chính vì hiện tượng đó làm cho công suất điện sẽ sụt xuống trong một khoảng thời
gian ngắn và sau khi áp suất nước trong đường ống được duy trì ổn định thì công
suất điện phát lên sẽ tăng dần đề bù lại lượng tăng phía phụ tải. Hiện tượng đặc
tính pha không cực tiểu của hầm dẫn nước phụ thuộc vào quán tính của nước. Quán
tính của khâu hầm dẫn nước được biểu diễn bằng đại lượng thời gian khởi động nước 𝑇 . CHƯƠNG 3
XÂY DỰNG MÔ HÌNH TOÁN HỌC CHO HỆ
ĐIỀU TỐC TURBINE – MÁY PHÁT THỦY ĐIỆN
Trước khi nghiên cứu, thiết kế hệ thống điều khiển cho hệ thống điều thống
điều tốc, bước đầu tiên chúng ta sẽ đi xây dựng mô hình toán học của các đối tượng
vậy lý trong hệ thống. Đầu tiên chúng ta sẽ cùng nhau đi tìm mô hình phi tuyến và
tuyến tính của Tuabin, sau đó là mô hình của các thành phần khác trong hệ thống
như van điện – thủy lực, xy-lanh thủy lực, cơ cấu phản hồi vị trí cánh hướng, phản
hồi tốc độ, phản hồi công suất và máy phát.
Chương 3: Xây dựng mô hình toán học cho hệ điều tốc Turbine – Máy phát thủy điện 3.1
Xây dựng mô hình phi tuyến của Tuabin
Tuabin thủy lực là một thành phần có tính chất phi tuyến. Có rất nhiều yếu
tố ảnh hưởng đến đặc tính làm việc của tuabin như độ quán tính và sự nén của dòng
nước, sự đàn hồi và ma sát của bề mặt hầm dẫn nước. Trong mục này, để đơn giản
chúng ta sẽ xây dựng mô hình phi tuyến của tuabin mà không xét đến ảnh hưởng
của yếu tố như độ đàn hồi của cột nước và coi dòng chảy là không nén.
Phương trình động thủy lực học được mô tả như sau: 𝑈 = 𝐾 ∗ 𝐺√𝐻 (2.1) 𝑃 = 𝐾 ∗ 𝐻 ∗ 𝑈 (2.2) 𝑑𝑈 𝑎 (2.3) = − ∗ (𝐻 − 𝐻 ) 𝑑𝑡 𝐿 𝑄 = 𝐴 ∗ 𝑈 (2.4) Trong đó:
U: Vận tốc dòng nước (m/s)
G: Độ mở canh hướng lý tưởng (%)
H: Giá trị cột áp làm việc (m)
𝐻 : Giá trị cột áp làm việc ban đầu (m)
𝑄: lưu lượng nước chảy qua tuabin (𝑚 /𝑠)
𝐴: Tiết diện hầm dẫn nước (𝑚 )
𝐿: Chiều dài hầm dẫn nước (m)
𝑎 : gia tốc trọng trường (𝑚/𝑠 ) 𝑡 : thời gian (s)
Để đơn giản hóa việc tính toán và mô phỏng về sau, chúng ta sẽ chuyển hệ
đơn vị tính toán từ hệ đơn vị có tên sang hệ đơn vị tương đối như sau: (2.5) 𝑈 𝐺 𝐻 = ∗ 𝑈 𝐺 𝐻 𝑃 𝑈 𝐻 (2.6) = ∗ 𝑃 𝑈 𝐻
Chương 3: Xây dựng mô hình toán học cho hệ điều tốc Turbine – Máy phát thủy điện 𝑑 𝑈 𝑎 𝐻 𝐻 𝐻 (2.7) = − ∗ ∗ − 𝑑𝑡 𝑈 𝐿 𝑈 𝐻 𝐻 Trong đó:
𝑈 : Vận tốc dòng nước cơ bản
𝐺 : Độ mở cánh hướng lý tưởng cơ bản
𝐻 : Giá trị cột áp làm việc cơ bản
𝑃 : Công suất cơ bản
Để đơn giản và tiện theo dõi các phương trình mô tả, ta đặt: 𝑈 (2.8) 𝑢 = 𝑈 𝐺 (2.9) 𝑔 = 𝐺 𝐻 (2.10) ℎ = 𝐻 𝐻 (2.11) ℎ = 𝐻 𝑃 (2.12) 𝑝 = 𝑃
Thay các phương trình (2.8),(2.9),(2.10),(2.11),(2.12) vào các phương trình (2.5),(2.6),(2.7), ta có: 𝑢 = 𝑔 ∗ √ℎ (2.13) 𝑝 = 𝑢 ∗ ℎ (2.14) 𝑑𝑢 1 (2.15) = − ∗ (ℎ − ℎ ) 𝑑𝑡 𝑇
Đưa phương trình (2.15) về dạng Laplace,ta có:
Chương 3: Xây dựng mô hình toán học cho hệ điều tốc Turbine – Máy phát thủy điện 𝑢 1 (2.16) = ℎ − ℎ 𝑇 ∗ 𝑠 Trong đó:
𝑇 : hằng số thời gian khởi động của nước 𝐿 ∗ 𝑈 𝐿 ∗ 𝑄 (2.17) 𝑇 = = 𝑩 𝑎 ∗ 𝐻 𝑎 ∗ 𝐴 ∗ 𝐻
Công suất cơ đầu ra của Tuabin được xác định thông qua phương trình dưới đây: 𝑃 = 𝑃 − 𝑃 (2.18) Trong đó:
𝑃 : Tổn thất tải cố định của Tuabin và được xác định thông qua phương trình sau đây: 𝑃 = 𝑈 ∗ 𝐻 (2.19) 𝑈 = 𝐴 ∗ 𝑔 ∗ 𝐻 (2.20)
Và 𝑈 là tốc độ nước khi không tải.
Biểu diễn phương trình (2.18) từ hệ đơn vị có tên sang hệ đơn vị tương đối, ta có:
𝑝 = (𝑢 − 𝑢 ) ∗ ℎ (2.21)
Trong các phương trình trên, G là độ mở lý tưởng của cánh hướng dựa trên
sự thay đổi từ không tải đến đầy tải là bằng 1 (đơn vị tương đối). Nó liên quan đến
độ mở mực g thông qua phương trình sau: 𝐺 = 𝐴 ∗ 𝑔 (2.22) Trong đó:
𝐴 : là hệ số khuyếc đại của Tuabin và được xác định thông qua phương trình dưới đây: 1 (2.23) 𝐴 = 𝑔 − 𝑔
Chương 3: Xây dựng mô hình toán học cho hệ điều tốc Turbine – Máy phát thủy điện
Từ phương trình (2.13), (2.14), (2.21) và (2.22) ta mô hình phi tuyến của
tubine như hình dưới đây:
Hình 3-1: Mô hình phi tuyến của Tuabin 3.2
Xây dựng mô hình tuyến tính của Tuabin
Để dễ dàng cho việc tổng hợp bộ điều khiển, ta sẽ xây dựng mô hình tuyến
tính của tuabin. Đặc tính của tuabin được xây dựng dựa trên 3 phương trình cơ bản sau đây:
Phương trình tốc độ dòng nước trong ống dẫn
Phương trình công suất cơ của tuabin
Phương trình gia tốc của cột nước
Các công thức được xây dựng dựa trên các giả thuyết sau:
Trở kháng của hệ thống thủy lực không đáng kể và có thể bỏ qua
Coi đường ống dẫn nước không đàn hồi và nước không bị nén
Tốc độ của dòng nước tỉ lệ trực tiếp với độ mở cánh hướng và căn bậc hai chiều cao cột nước
Công suất của tuabin tỉ lệ với chiều cao cột nước và lưu lượng dòng chảy
3.2.1 Phương trình tốc độ dòng nước trong ống dẫn
Tốc độ của dòng nước trong đường ống dẫn nước được thể hiện thông qua
phương trình dưới đây:
𝑈 = 𝐾 ∗ 𝐺 ∗ √𝐻 (2.24) 𝑄 = 𝐴 ∗ 𝑈 (2.25) Trong đó:
Chương 3: Xây dựng mô hình toán học cho hệ điều tốc Turbine – Máy phát thủy điện
U: Vận tốc dòng nước (m/s)
Q: Lưu lượng của dòng nước (𝑚 /𝑠)
G: Độ mở cánh hướng nước (%)
H: Chiều cao cột áp (m)
𝐾 : Hệ số tỉ lệ
𝐴: tiết diện hầm dẫn nước (𝑚 )
Tuyến tính hóa tại điểm làm việc (𝑈 , 𝐺 , 𝐻 ), ta có: 𝜕𝑈 𝜕𝑈 (2.26) ∆𝑈 = ∗ ∆𝐻 + ∗ ∆𝐺 𝜕𝐻 𝜕𝐺
Chia hai vế của phương trình (2.26) cho 𝑈 = 𝐾 ∗ 𝐺 ∗ 𝐻 , ta có: ∆𝑈 ∆𝐻 ∆𝐺 (2.27) = + 𝑈 2 ∗ 𝐻 𝐺
Trong đơn vị tương đối, ta có: 1 (2.28) ∆𝑢 = ∗ ∆ℎ + ∆𝑔 2
3.2.2 Phương trình công suất cơ của tuabin
Công thức cơ của tuabin được mô tả qua phương trình (2.29) dưới đây: P=𝐾 ∗ 𝐻 ∗ 𝑈 (2.29) Trong đó:
P: Công suất cơ trên trục tuabin
𝐾 : Hệ số tỉ lệ
𝐻: Độ cao cột nước
𝑈: Vận tốc dòng chảy
Tuyến tính hóa xung quanh điểm làm việc và biểu diễn trong hệ đơn vị tương
đối, ta có phương trình sau đây:

