Đồ án tốt nghiệp - Công nghiệp ô tô | Đại học Lâm Nghiệp
Đồ án tốt nghiệp - Công nghiệp ô tô | Đại học Lâm Nghiệp được sưu tầm và soạn thảo dưới dạng file PDF để gửi tới các bạn sinh viên cùng tham khảo, ôn tập đầy đủ kiến thức, chuẩn bị cho các buổi học thật tốt. Mời bạn đọc đón xem!
Môn: Kỹ thuật cơ điện tử 10 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.5 K tài liệu
Tác giả:

















Preview text:
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI MC LC
LI NI ĐU.............................................................................................................................4
CHƯƠNG I..................................................................................................................................5
TỔNG QUAN HỆ THNG LI..................................................................................................5
1. Công dng, phân loi v yêu cu.......................................................................................5
1.1. Công dụng.....................................................................................................................5
1.2. Các trạng thái quay vòng của xe....................................................................................5
1.3. Phân loại hệ thống lái....................................................................................................6
2. Các bộ phận hợp thnh hệ thống lái ô tô..........................................................................7
2.1. Vành lái.........................................................................................................................7
2.2. Trục lái..........................................................................................................................8
2.3. Cơ cấu lái......................................................................................................................8
2.4. Góc đặt bánh xe...........................................................................................................16
2.5. Dẫn động lái................................................................................................................21
2.6. Hệ thống lái có trợ lực.................................................................................................23
CHƯƠNG II...............................................................................................................................25
PHÂN TÍCH LỰA CHỌN PHƯƠNG N THIT K...............................................................25 1.
Phân tích lựa chọn phương án thiết kế cơ cấu lái......................................................25
1.1. Bánh răng – thanh răng................................................................................................25
1.2. Trục vít – ê cubi – thanh răng – cung răng...................................................................25 2.
Phân tích lựa chọn phương án thiết kế dẫn động lái.................................................25
2.1. Dẫn động lái với hình thang lái 4 khâu........................................................................25
2.2. Dẫn động lái với hình thang lái 6 khâu........................................................................26 3.
Phân tích lựa chọn phương án cường hóa lái.............................................................26
3.1. Cường hóa điện...........................................................................................................26
3.2. Cường hóa khí nén......................................................................................................26
3.3. Cường hóa thủy lực.....................................................................................................27
CHƯƠNG III.............................................................................................................................28
TÍNH TON HỆ THNG LI XE TI 2,5 TẤN – XE THAM KHO: HUYNDAI 2,5 TẤN
HD65..........................................................................................................................................28
Các số liệu thiết kế....................................................................................................................28 I.
TÍNH TON ĐỘNG HỌC CỦA HỆ THNG LI.......................................................29 1.
Tính toán động học hình thang lái...........................................................................29 2.
Xây dựng đường cong đặc tính hình thang lái lý thuyết........................................31 3.
Xây dựng đường cong đặc tính hình thang lái thực tế...........................................31
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 1
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI 4.
Xác định mô men cản quay vòng ti chỗ................................................................34 5.
Xác định lực cực đi tác dng lên vnh tay lái.......................................................37 6.
Xác định góc quay vnh lái v bán kính quay vòng ô tô........................................38
II. TÍNH TON THIT K CƠ CẤU LI TRgC VÍT – Ê CUBI – THANH RĂNG –
CUNG RĂNG........................................................................................................................39 1.
Thông số hình học.....................................................................................................39 2.
Thiết kế bộ truyền trc vít – ê cubi.........................................................................39 3.
Thiết kế bộ truyền thanh răng - cung răng.............................................................43
3.1. Chọn vật liệu..............................................................................................................44
3.2. Xác định các thông số của bộ truyền..........................................................................44
III. TÍNH BỀN HỆ THNG LI...........................................................................................47 1.
Tính bền trc lái.......................................................................................................47 2.
Tính bền đòn quay đứng..........................................................................................48 3.
Tính bền đòn kéo dọc...............................................................................................50 4.
Tính bền đòn kéo ngang...........................................................................................51 5.
Tính bền đòn bên......................................................................................................53 6.
Tính bền khớp cu (Rô tuyn)...................................................................................54
CHƯƠNG IV.............................................................................................................................56
THIT K HỆ THNG CƯNG HA LI.............................................................................56 I.
CC YÊU CU CỦA CƯNG HA LI....................................................................56
II. LỰA CHỌN PHƯƠNG N B TRÍ CƯNG HA LI.............................................56 1.
Một số phương án bố trí cường hóa hệ thống lái...................................................56 2.
Chọn van phân phối.................................................................................................60 3.
Nguyên lý lm việc của van phân phối kiểu van xoay............................................60 III.
TÍNH TON CƯNG HA LI..............................................................................61 1.
Lực lái lớn nhất đặt lên vnh tay lái........................................................................61 2.
Xây dựng đặc tính cường hóa lái.............................................................................61 3.
Xác định lực tính toán..............................................................................................63 4.
Tính toán xilanh lực.................................................................................................64 5.
Tính chọn bơm trợ lực.............................................................................................66 6.
Tính toán các chi tiết của van phân phối................................................................67
CHƯƠNG V..............................................................................................................................70
BO DƯỠNG Vf SỬA CHỮA HỆ THNG LI....................................................................70 I.
BO DƯỠNG KỸ THUẬT HỆ THNG LI...............................................................70 1.
Bảo dưỡng kỹ thuật hệ thống...................................................................................70 2.
Sửa chữa chi tiết hệ thống lái...................................................................................70
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 2
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
II. SỬA CHỮA HỆ THNG LI.......................................................................................71
Những hiện tượng hư hỏng chính của hệ thống lái................................................71
Kiểm tra điều chZnh cơ cấu lái.................................................................................73
Kiểm tra dẫn đô [ng lái v kh\c phc khe hơ...........................................................74
Kiểm tra trợ lực lái...................................................................................................74
KT LUÂN................................................................................................................................75
TfI LIÊU THAM KHO..........................................................................................................76
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 3
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI LI NI ĐU
Trong nền kính tv đang tăng trưwng mạnh my của nước ta, nhu czu về giao
thông vâ n t{i ngày càng lớn. Vai trò quan trọng của ô tô ngày càng được kh|ng
định vì ô tô có kh{ năng cơ đô ng cao, vâ n chuy}n được người và hàng hóa trên
nhiều loại địa hình khác nhau.
Nh~ng năm gzn đây, lượng ô tô t{i có xu hướng tăng lên, đă c biê t là loại ô tô t{i
2,5 tấn với ưu đi}m về kh{ năng cơ đô ng, tính kinh tv và thích hợp với nhiều mục đích s€ dụng khác nhau.
Với ô tô nói chung và ô tô t{i nói riêng, an toàn chuy}n đô ng là ch• tiêu hàng
đzu trong viê c đánh giá chất lượng thivt kv và s€ dụng của phương tiê n. Mô t
trong các hê thống quyvt định đvn tính an toàn và ‚n định chuy}n đô ng là hê
thống lái. Với đƒ án tốt nghiê p của em, em đ„ cơ b{n hoàn thành viê c thiết kế hê [
thống lái cho xe ô tô tải 2,5 tấn.
Sau nhiều ngày dưới sự ch• b{o hướng dẫn tâ n tình của thzy NGUYdN TRỌNG
HOAN và sự tìm hi}u của em, em đ„ cơ b{n hoàn thành đƒ án tốt nghiê p. Trong
quá trình thực hiê n, ch…c ch…n không th} tránh kh†i nh~ng thivu sót. Do đó em
rất mong được sự ch• b{o của các thzy đ} đƒ án của em được hoàn thiê n đzy đủ. Em xin chân thành c{m ơn!
Hà Nô i ngày……tháng……năm 2015 Sinh viên NGUYdN TƯNG HƯNG
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 4
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI CHƯƠNG I TỔNG QUAN HỆ THNG LI
1. Công dng, phân loi v yêu cu 1.1. Công dng
Hệ thống lái của ô tô dŠng đ} thay đ‚i hướng chuy}n động của ô tô nhờ quay
vòng các bánh xe dẫn hướng cũng như đ} gi~ phương chuy}n động th|ng hay
chuy}n động cong của ô tô khi czn thivt.
Việc điều khi}n hướng chuy}n động của xe được thực hiện như sau: vành lái
tivp nhận lực tác động của người lái và truyền vào hệ thống lái, trục lái truyền mô
men từ vô lăng tới cơ cấu lái, cơ cấu lái tăng mô men truyền từ vành lái tới các
thanh dẫn động lái, các thanh dẫn động lái truyền chuy}n động từ cơ cấu lái đvn
các bánh xe dẫn hướng. Kvt cấu lái phụ thuộc vào cơ cấu chung của xe và của từng chủng loại xe.
Đ} quay vòng được thì người lái czn ph{i tác dụng vào vô lăng một lực. Đƒng
thời czn có một ph{n lực sinh ra từ mặt đường lên mặt vuông góc với bánh xe.
Đ} quay vòng đúng thì các bánh xe dẫn hướng ph{i quay quanh một tâm quay tức thời khi quay vòng.
1.2. Các trng thái quay vòng của xe
Sự chuy}n động và thay đ‚i hướng chuy}n động của xe trên đường là quá trình
phức tạp. Khi xe chuy}n động trên đường vòng với tốc độ thấp thì ứng với mỗi vị
trí góc quay của vành tay lái nhất định
xe sy quay vòng với một bán kính quay v1
vòng R0 tương ứng. Đây có th} coi là trạng thái quay vòng tĩnh (quay vòng đủ).
Trong thực tv xe thường chuy}n động w tốc độ lớn, do vậy quá trình quay vòng
là động, trạng thái quay vòng đủ ít x{y ra mà thường gặp là trạng thái quay vòng
thivu và quay vòng thừa x{y ra trên cơ sw của việc thay đ‚i tốc độ chuy}n động,
sự đàn hƒi của lốp và hệ thống treo.
Khi quay vòng thivu, đ} thực hiện quay vòng xe theo bán kính R0 người lái ph{i
tăng góc quay vành lái một lượng . Khi quay vòng thừa, đ} thực hiện quay v1 vòng
xe theo bán kính R người lái ph{i gi{m góc qu 0
ay vành lái một lượng v1.
Quay vòng thừa và quay vòng thivu là nh~ng trạng thái quay vòng nguy hi}m,
làm mất tính ‚n định và điều khi}n của xe vì chúng gia tăng lực ly tâm (vận tốc
quay vòng của xe tăng kéo theo lực ly tâm khi quay vòng tăng). Ở nh~ng trạng
thái này yêu czu người lái ph{i có kinh nghiệm x€ lý tốt. Vấn đề chất t{i, độ đàn
hƒi của lốp cũng có {nh hưwng tới tính năng quay vòng và tính an toàn chuy}n
động của xe, đặc biệt là nh~ng xe có vận tốc lớn.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 5
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI o qv Tr¹ ng th¸i quay vßng R o R R qv R thiª u: Rqv>Ro Tr¹ ng th¸i quay vßng thõa: RqvO1 O O O1
Hình 1: Các trng thái quay vòng của xe
1.3. Phân loi hệ thống lái
Có nhiều cách đ} phân loại hệ thống lái ô tô:
1.3.1. Phân loại theo phương pháp chuyển hướng
+ Chuy}n hướng hai bánh xe w czu trước (2WS);
+ Chuy}n hướng tất c{ các bánh xe (4WS).
1.3.2. Phân loại hệ thống lái theo đặc tính truyền lực + Hệ thống lái cơ khí;
+ Hệ thống lái cơ khí có trợ lực bằng thủy lực;
+ Hệ thống lái trợ lực bằng khí nén hoặc chân không;
+ Hệ thống lái trợ lực điê n.
1.3.3. Phân loại theo kết cấu của cơ cấu lái
+ Cơ cấu lái ki}u trục vít glôbôit – con lăn;
+ Cơ cấu lái ki}u trục vít – ê cubi – thanh răng- cung răng;
+ Cơ cấu lái ki}u bánh răng – thanh răng;
+ Cơ cấu lái ki}u trục vít- cung răng.
Ngoài ra còn có cơ cấu lái: trục vít – chốt quay, bánh răng- cung răng…
1.3.4. Phân loại theo cách bố trí vành lái
+ Bố trí vành lái bên trái ( theo luật đi đường bên ph{i);
+ Bố trí vành lái bên ph{i (theo luật đi đường bên trái).
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 6
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
1.4. Yêu cầu của hệ thống lái ô tô
Một trong các hệ thống quyvt định đvn tính an toàn và ‚n định chuy}n động của
ô tô là hệ thống lái. Theo đó hệ thống lái czn đ{m b{o các yêu czu sau:
Đ{m b{o tính năng vận hành cao của ô tô có nghĩa là kh{ năng quay vòng
nhanh và ngặt trong một thời gian rất ng…n trên một diện tích rất bé;
Lực tác dụng lên vành lái nhẹ, vành lái nằm w vị trí tiện lợi đối với người lái;
Đ{m b{o được động học quay vòng đúng đ} các bánh xe không bị trượt lvt khi quay vòng;
Hệ thống trợ lực ph{i có tính tŠy động đ{m b{o phối hợp chặt chy gi~a sự
tác động của hệ thống lái và sự quay vòng của bánh xe dẫn hướng;
Tránh va đập truyền ngược từ bánh xe lên vành lái;
Cơ cấu lái ph{i được đặt w phzn được treo đ} kvt cấu hệ thống treo trước
không {nh hưwng đvn động học cơ cấu lái;
Gi~ chuy}n động th|ng ‚ định;
Hệ thống lái ph{i được bố trí thuận tiện trong việc b{o dưỡng và s€a ch~a.
2. Các bộ phận hợp thnh hệ thống lái ô tô 9 7 8 B A 6 3 5 2 4 1
Hình 2: Sơ đồ tổng quát hệ thống lái.
1. Vành lái 5. Đòn kéo dọc 9. Bánh xe
2. Trục lái 6. Hình thang lái
3. Cơ cấu lái 7. Đòn quay ngang
4. Đòn quay đứng 8. Trụ xoay đứng 2.1. Vnh lái
Vành lái có dạng vành tròn. Lực của người lái tác dụng lên vành lái tạo ra mô
men quay đ} hệ thống lái làm việc. Mô men tạo ra trên vành lái là tích số của lực
người lái trên vành tay lái với bán kính của vành lái. Mv1=P1.rv1
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 7
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI Trong đó: Mv1: mô men vành lái
P : lực mà người lái tạo ra trên 1 vành lái rv1: bán kính vành lái.
Vành lái của bất kỳ loại ô tô nào cũng có độ rơ nhất định, với xe con không vượt quá 80. 2.2. Trc lái
Trục lái có nhiệm vụ truyền mô men lái xuống cơ cấu lái. Trục lái gƒm có trục
lái chính có th} truyền chuy}n động quay của vô lăng xuống cơ cấu lái và ống
trục lái đ} cố định trục lái vào thân xe. Trục lái kvt hợp với một cơ cấu hấp thụ va
đập. Cơ cấu này hấp thụ lực dọc trục tác dụng lên người lái khi có va đập mạnh hoặc khi tai nạn x{y ra.
Trục lái thường có hai loại: Loại trục lái có thể thay đổi được góc nghiêng và
loại trục lái không thay đổi được góc nghiêng.
Ngoài cơ cấu hấp thụ va đập w trục lái chính còn có th} có thêm một số cơ cấu
điều khi}n như: cơ cấu khóa lái đ} khóa cứng trục lái, cơ cấu nghiêng trục lái đ}
có th} điều ch•nh vị trí vô lăng theo phương th|ng đứng phŠ hợp với người lái, hệ
thống trượt trục lái đ} có th} điều ch•nh vị trí vô lăng theo phương th|ng đứng
phŠ hợp với người lái, hệ thống trượt trục lái đ} có th} điều ch•nh được chiều dài
của trục lái và đạt được vị trí ngƒi lái tốt nhất cho người lái. 2.3. Cơ cấu lái
Cơ cấu lái là bộ gi{m tốc đ{m b{o tăng mô men tác động của người lái đvn các
bánh xe dẫn hướng. Tỷ số truyền của cơ cấu lái thường bằng 18 đvn 20 đối với xe
con và bằng từ 21 đvn 25 đối với xe t{i.
2.3.1. Các yêu cu của cơ cấu lái
Cơ cấu lái czn ph{i đ{m b{o nh~ng yêu czu sau:
Có th} quay được c{ hai chiều đ} đ{m b{o chuy}n động czn thivt của xe;
Có hiệu suất cao đ} lái nhẹ, trong đó czn có hiệu suất thuận lớn hơn hiệu
suất nghịch đ} các va đập từ mặt đường được gi~ lại phzn lớn w cơ cấu lái;
Đ{m b{o thay đ‚i trị số của tỷ số truyền khi czn thivt;
Đơn gi{n trong việc điều ch•nh kho{ng hw ăn khớp của cơ cấu lái;
Độ rơ của cơ cấu lái là nh† nhất;
Đ{m b{o kvt cấu đơn gi{n nhất, giá thấp nhất và tu‚i thọ cao;
Chivm ít không gian và dễ dàng tháo l…p.
Sự đàn hƒi của hệ thống lái có {nh hưwng tới sự truyền các va đập từ mặt đường
lên vô lăng. Độ đàn hƒi càng lớn thì sự va đập truyền lên vô lăng càng ít, nhưng
nvu độ đàn hƒi lớn quá sy {nh hưwng đvn kh{ năng chuy}n động của xe. Độ đàn
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 8
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
hƒi của hệ thống lái được xác định bằng tỷ số góc quay đàn hƒi tính trên vành lái
vô lăng và mô men đặt trên vành lái. Độ đàn hƒi của hệ thống lái phụ thuộc vào
độ đàn hƒi của các phzn t€ như cơ cấu lái, các đòn dẫn động.
2.3.2. Tỷ số truyền của cơ cấu lái
Tỷ số truyền của cơ cấu lái ic là tỷ số gi~a góc quay của bánh lái và góc quay của đòn quay đứng. : góc quay của vô lăng
:góc quay của trục đòn quay đứng
Tỷ số truyền của cơ cấu lái đ{m b{o tăng mô men từ vành lái đvn các bánh xe
dẫn hướng. Tỷ số truyền lớn sy gi{m lực đánh lái nhưng người lái ph{i quay vô
lăng nhiều hơn khi quay vòng.
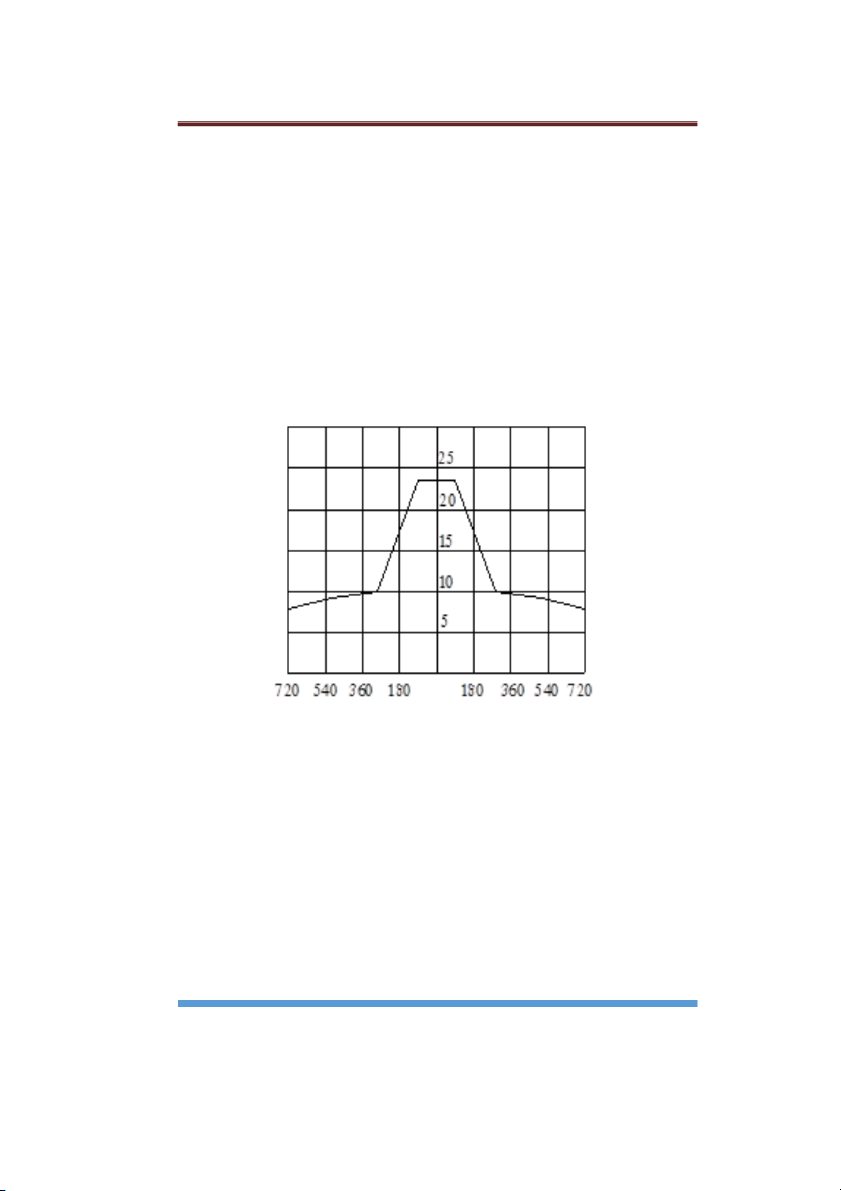
Hình 3: Quy luật thay đổi tỷ số truyền ic của cơ cấu lái
Vấn đề chọn tỷ số truyền của cơ cấu lái trên cơ sw ứng với 1 đvn 2 vòng quay
của vô lăng thì bánh xe ph{i quay được tối đa từ 350 đvn 45 0từ vị trí trung gian
trw đi. Quy luật thay đ‚i tỷ số truyền thích hợp nhất được th} hiện trên gi{n đƒ hình 3.
Trong phạm vi góc quay ≤ thì tỷ số truyền của cơ cấu lái có giá trị cực đại đ{m
b{o chính xác cao trong khi lái ô tô trên đường th|ng với tốc độ cao và giúp lái
nhẹ nhàng vì đa số thời gian lái là quay vành lái một góc nh† quanh vị trí trung
gian. Ngoài việc lái nhẹ ra, cơ cấu lái có tỷ số truyền thay đ‚i theo quy luật như
thv sy gi{m {nh hưwng của nh~ng va đập từ bánh dẫn hướng lên vành lái.
Khi thì ic gi{m rất nhanh, w hai rìa của đƒ thị thì ic hzu như không thay đ‚i. Ở
đoạn này khi quay vành lái một góc nh† thì bánh dẫn hướng quay một góc lớn
giúp kh{ năng quay vòng của ô tô tốt hơn.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 9
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
2.3.3. Tỷ số truyền của dẫn động lái id
Tỷ số truyền này phụ thuộc vào kích thước và quan hệ của các cánh tay đòn.
Trong quá trình bánh xe dẫn hướng quay vòng giá trị của các cánh tay đòn sy
thay đ‚i. Trong các kvt cấu hiện nay i thay đ‚i không nhiều l…m: i d = 0,9 ÷ 1,2. d
2.3.4. Tỷ số truyền lực của hệ thống lái il
Là tỷ số gi~a t‚ng lực c{n quay vòng tác dụng lên bánh xe dẫn hướng và lực đặt
lên vành lái czn thivt đ} kh…c phục lực c{n quay vòng. ; Trong đó:
pc: lực c{n quay vòng tác dụng lên bánh xe dẫn hướng;
pl: lực đă t lên vành lái;
Mc: mô men c{n quay vòng của bánh xe;
c: cánh tay đòn quay vòng tức là kho{ng cách từ tâm mặt tựa của lốp đvn đường trục đứng kéo dài;
Ml: mô men lái đặt lên vành lái; r: bán kính vành tay lái. Như vậy ta có:
Bán kính vành tay lái w đa số ô tô hiện nay là 200 ÷ 250 (mm) và tỷ số truyền
góc i g không vượt quá 25 vì vậy il không được lớn quá, il hiện nay chọn trong kho{ng 10 ÷ 30.
2.3.5. Hiê [u suất thuâ [n
Hiê u suất thuận là hiệu suất tính theo lực truyền từ trên trục lái xuống. Hiệu suất
thuận càng cao thì lái càng nhẹ. Khi thivt kv hệ thống lái yêu czu ph{i hiệu suất thuận cao.
2.3.6. Hiệu suất nghịch
Hiệu suất nghịch là hiệu suất tính theo lực truyền từ đòn quay đứng lên trục lái.
Nvu hiệu suất nghịch rất bé thì các lực va đập tác dụng lên hệ thống chuy}n động
của ô tô sy không truyền đvn bánh lái được vì chúng bị triệt tiêu bwi ma sát trong
cơ cấu lái. Nhưng không th} đưa hiệu suất nghịch xuống thấp quá vì khi đó bánh
lái sy không tự tr{ lái được về vị trí đ„ quay về vị trí ban đzu và đ} hạn chv các va
đập từ đường tác dụng lên hệ thống lái trong một phạm vi nào đấy thì cơ cấu lái
được thivt kv với một hiệu suất nghịch nhất định.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 10
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
2.3.7. Một số loi cơ cấu lái thường dùng
2.3.7.1. Cơ cấu lái trục vít chốt quay
Cơ cấu lái loại này gƒm hai loại:
+ Cơ cấu lái trục vít và một chốt quay;
+ Cơ cấu lái trục vít và hai chốt quay.
Hình 4: Cơ cấu lái trc vít chốt quay Ưu điểm:
Cơ cấu lái loại trục vít chốt quay có th} thay đ‚i tỷ số truyền theo yêu
czu cho trước. TŠy theo điều kiện cho trước khi chv tạo khi chv tạo trục
vít ta có th} có loại cơ cấu lái chốt quay với tỷ số truyền không đ‚i, tăng
hoặc gi{m khi quay vành lái ra kh†i vị trí trung gian. Đ} tăng hiệu suất
của cơ cấu lái và gi{m độ mòn của trục vít và chốt quay thì chốt được đặt trong ‚ bi.
Nvu bước của trục vít không đ‚i thì tỷ số truyền được xác định theo công thức: 2. .r2 i Cos c . t Trong đó:
: Góc quay của đòn quay đứng; r2: Bán kính đòn quay.
Hiệu suất thuận và hiệu suất nghịch của cơ cấu lái này vào kho{ng 0,7. Cơ cấu
lái này được dŠng trước hvt w hệ thống lái không có cường hoá nó được dŠng chủ
yvu cho ôtô t{i và ôtô khách.
Loại cơ cấu lái trục vít đòn quay với một chốt quay ngày càng ít được s€ dụng
vì áp suất riêng gi~a chốt và trục vít lớn, chốt mòn nhanh, b{n thân chốt có độ chịu mài mòn kém.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 11
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Đ} điều ch•nh khe hw gi~a chốt và trục vít bằng cách dịch chuy}n trục quay
đứng theo chiều trục, ngoài ra còn ph{i điều ch•nh kho{ng hw của trục lái.
2.3.7.2. Cơ cấu lái trục vít con lăn
Loại cơ cấu lái này được s€ dụng rộng r„i nhất. Cơ cấu lái gƒm trục vít glôbôit
1 ăn khớp với con lăn 2 (có ba tzng ren) đặt trên các ‚ bi kim của trục 3 của đòn
quay đứng. Số lượng ren của loại cơ cấu lái trục vít con lăn có th} là một, hai
hoặc ba tŠy theo lực truyền qua cơ cấu lái.
Hình 5: Cơ cấu lái trc vít con lăn Ưu điểm:
Nhờ trục vít có dạng glô-bô-it cho nên tuy chiều dài trục vít không lớn
nhưng sự tivp xúc các răng ăn khớp được lâu hơn và trên diện rộng hơn,
nghĩa là gi{m được áp suất riêng và tăng độ chống mài mòn. T{i trọng tác
dụng lên chi tivt tivp xúc được phân tán tŠy theo cỡ ôtô mà làm con lăn có hai đvn bốn vòng ren;
Mất mát do ma sát ít hơn nhờ thay được ma sát trượt bằng ma sát lăn;
Có kh{ năng điều ch•nh khe hw ăn khớp gi~a các bánh răng. Đường trục
của con lăn nằm lệch với đường trục của trục vít một đoạn = 5
7(mm), điều này cho phép triệt tiêu sự ăn mòn khi ăn khớp bằng cách
điều ch•nh trong quá trình s€ dụng.
Tỷ số truyền cơ cấu lái trục vít con lăn xác định tại vị trí trung gian xác định theo công thức: 2. .r2 ic t.z1 Trong đó:
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 12
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
r : Bán kính vòng tròn ban đzu của hình glô-bô-it c 2 ủa trục vít; t: Bước của trục vít;
z : Số đường ren của truc vít. 1
Tỷ số truyền của cơ cấu lái ic sy tăng lên từ vị trí gi~a đvn vị trí rìa kho{ng 5
7% nhưng sự tăng này không đáng k} coi như tỷ số truyền của loại trục vít con
lăn là không thay đ‚i. Hiệu suất thuận th = 0,65, hiệu suất nghịch = 0,5. ng
2.3.7.3. Cơ cấu lái kiểu bánh răng – thanh răng
Cơ cấu lái ki}u bánh răng – thanh răng gƒm bánh răng w phía dưới trục lái chính
ăn khớp với thanh răng, trục bánh răng được l…p trên các ‚ bi. Điều ch•nh các ‚
này dŠng êcu lớn ép chặt ‚ bi, trên v† êcu đó có phớt che bụi đ{m b{o trục răng quay nhẹ nhàng.
Thanh răng có cấu tạo dạng răng nghiêng, phzn c…t răng của thanh răng nằm w
phía gi~a, phzn thanh còn lại có tivt diện tròn. Khi vô lăng quay, bánh răng quay
làm thanh răng chuy}n động tịnh tivn sang ph{i hoặc sang trái trên hai bạc trượt.
Sự dịch chuy}n của thanh răng được truyền tới đòn bên qua các đzu thanh răng,
sau đó làm quay bánh xe dẫn hướng quanh trụ xoay đứng.
Cơ cấu lái đă t trên v† xe đ} tạo góc ăn khớp lớn cho bô truyền răng nghiêng, trục răng
đă t nghiêng ngược chiều với chiều nghiêng của thanh răng, nhờ vâ y sự ăn khớp
của bô truyền lớn, do đó làm viê c êm và phŠ hợp với viê c bố trí vành lái trên xe. Ưu điểm:
Cơ cấu lái đơn gi{n gọn nhẹ. Do cơ cấu lái nh† và b{n thân thanh răng tác dụng
như thanh dẫn động lái nên không czn các đòn kéo ngang như các cơ cấu lái khác;
Có độ nhạy cao vì ăn khớp gi~a các răng là trực tivp;
Sức c{n trượt, c{n lăn nh† và truyền mô men rất tốt nên tay lái nhẹ.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 13
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Hình 6: Cơ cấu lái kiểu bánh răng – thanh răng
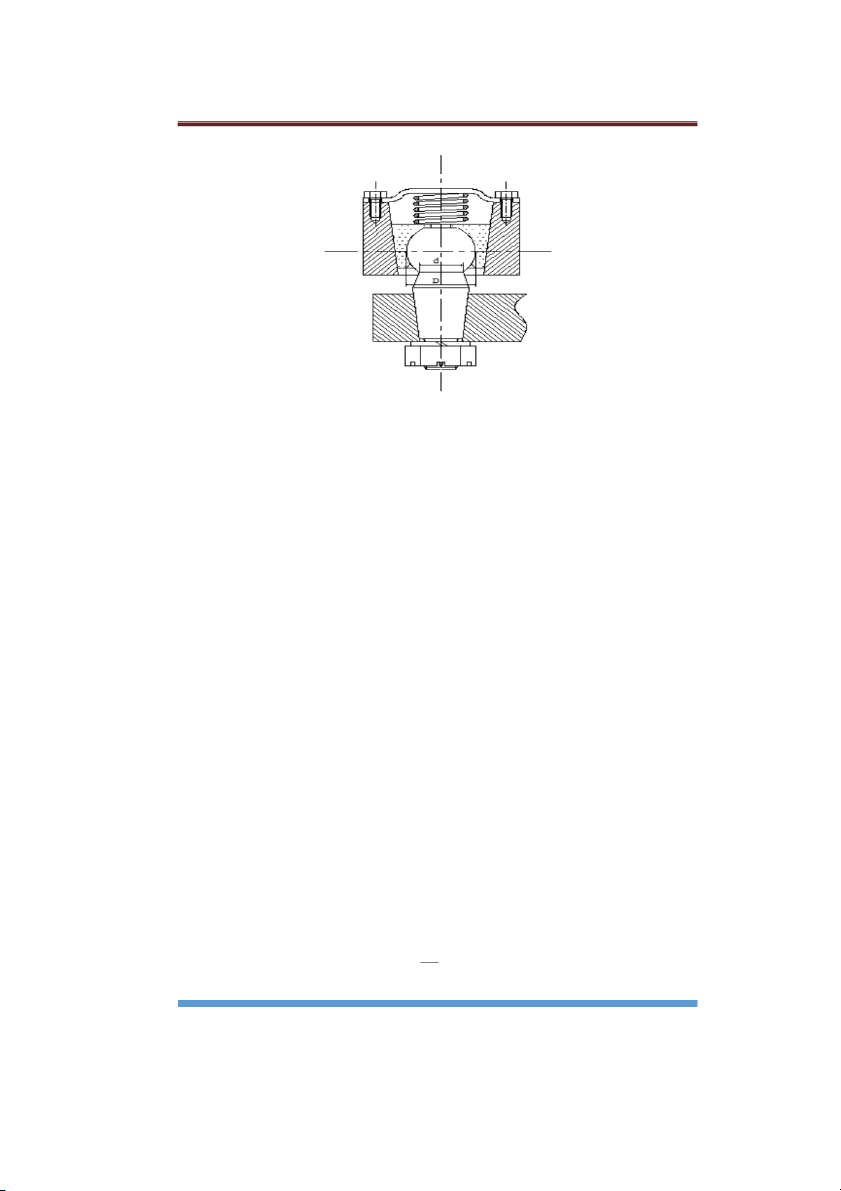
2.3.7.4. Cơ cấu lái trục vít cung răng
Với tivt diện bên của mặt c…t ngang của mối răng trục vít và răng của cung răng
là hình thang, trục vít và cung răng tivp xúc nhau theo đường nên toàn bộ chiều
dài của cung răng đều truyền t{i trọng. Vì vậy áp suất riêng, ứng suất tivp xúc, độ
mòn của trục vít và cung răng đều gi{m. Đ} đạt độ cứng v~ng tốt người ta đặt
trục đòn quay trong ‚ bi kim và tìm cách hạn chv độ võng của cung răng.
Khe hw ăn khớp thay đ‚i từ 0,03 mm (w vị trí trung gian), 0,25 0,6 mm w vị trí
hai bên rìa. Điều ch•nh khe hw ăn khớp nhờ thay đ‚i chiều dày của đệm đƒng 2.
Kh…c phục kho{ng hw trong các ‚, thanh lăn nhờ gi{m bớt các đệm điều ch•nh 1 từ n…p trên của v†. Ưu điểm:
Cơ cấu lái trục vít cung răng có ưu đi}m là gi{m được trọng lượng và kích
thước so với loại trục vít bánh răng. Do ăn khớp trên toàn bộ chiều dài của
cung răng nên áp suất trên răng bé, gi{m được ứng suất tivp xúc và hao mòn.
Tuy nhiên loại này có nhược điểm là có hiệu suất thấp.
Tỷ số truyền của cơ cấu lái trục vít cung răng được xác định theo công thức: 2. .r0 ic t Trong đó:
r0: Bán kính vòng tròn cơ sw của cung răng; t: Bước trục vít.
Hình 7: Cơ cấu lái trc vít – cung răng
1,2 vòng đệm điều chZnh
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 14
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Tỷ số truyền của cơ cấu lái loại này có giá trị không đ‚i. Hiệu suất thuận kho{ng
0,5 còn hiệu suất nghịch kho{ng 0,4. Cơ cấu lái loại này có th} dŠng trên các loại ôtô khác nhau.
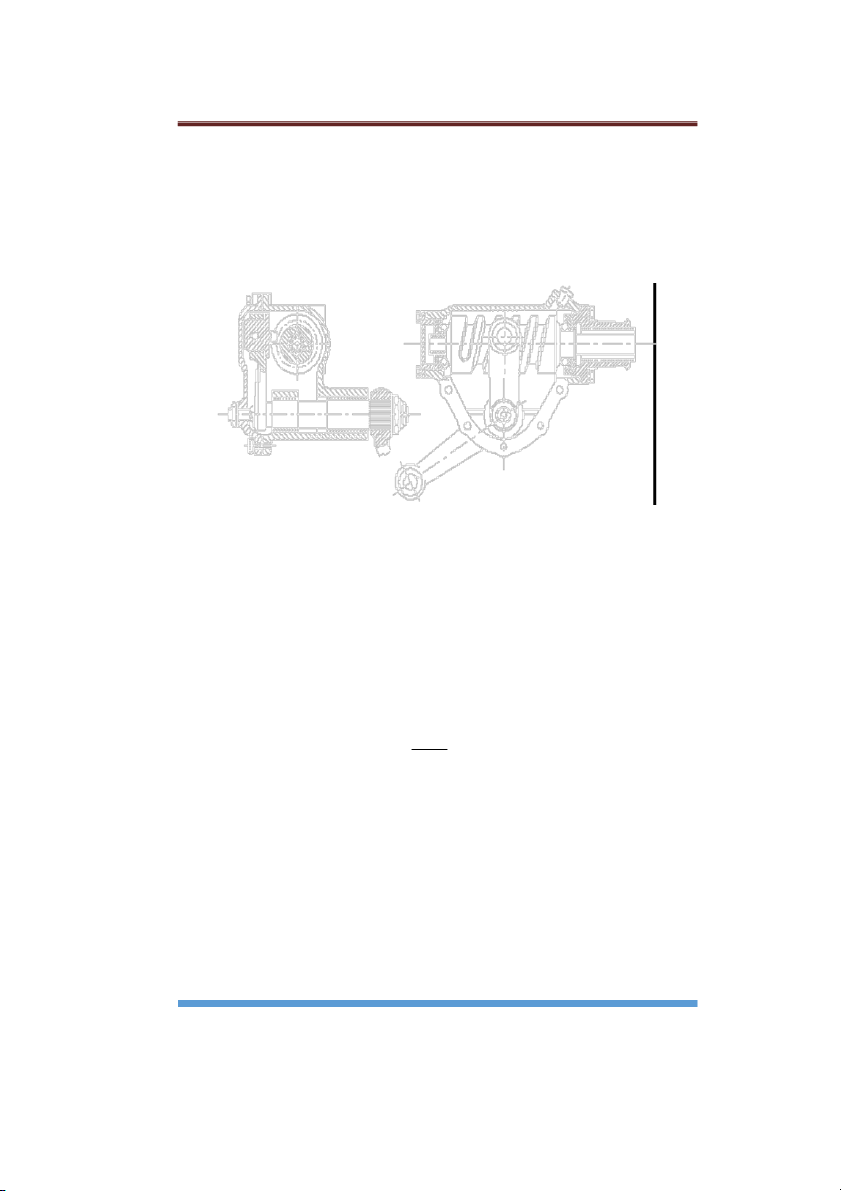
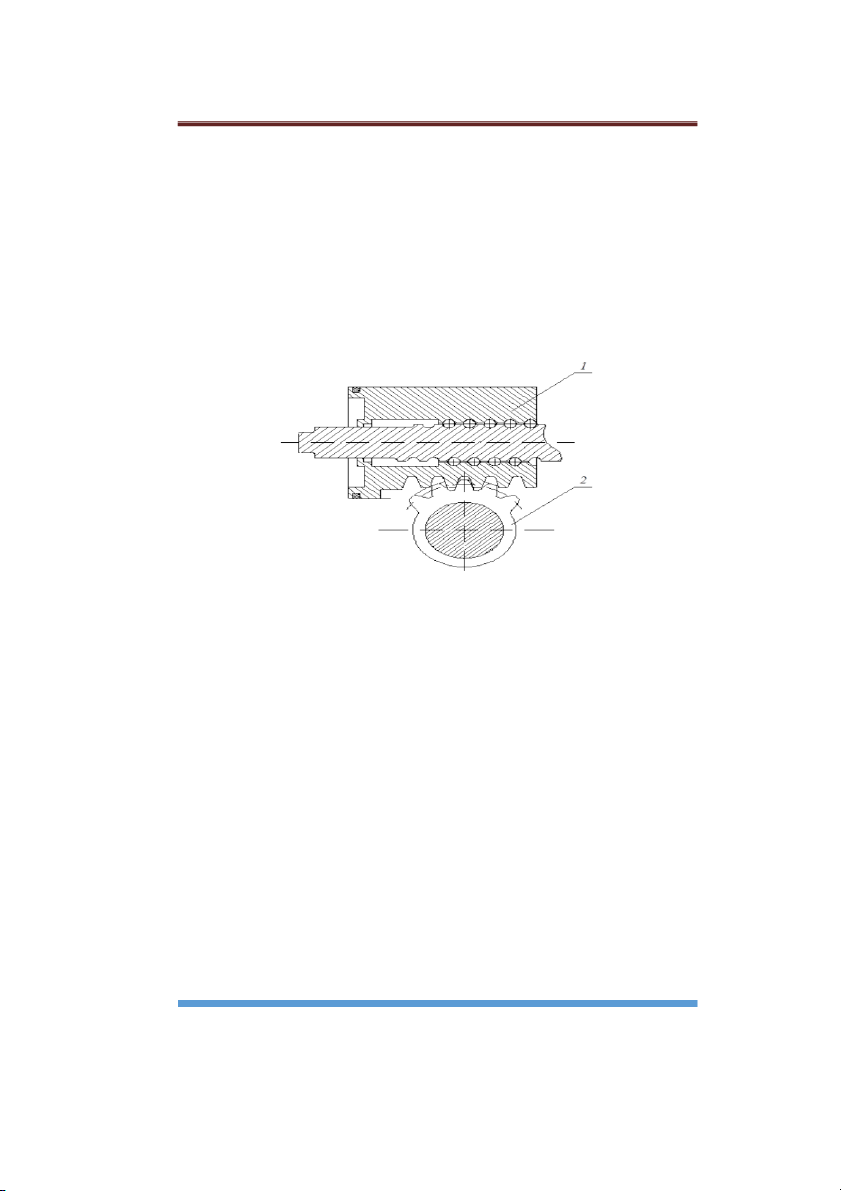
2.3.7.5. Cơ cấu lái trục vít – êcu bi – thanh răng – cung răng
Gƒm một trục vít có hai đzu được đỡ bằng ‚ bi đỡ chặn. Trục vít êcu có r„nh
tròn có chứa các viên bi lăn trong r„nh. Khi đvn cuối r„nh thì các viên bi theo
đường hƒi bi quay trw lại vị trí ban đzu.
Khi trục vít quay (phzn chủ động), êcu bi chạy dọc trục vít, chuy}n động này
làm quay răng rẻ quạt. Trục của bánh răng rẻ quạt là trục đòn quay đứng. Khi
bánh răng rẻ quạt quay làm cho đòn quay đứng quay, qua các đòn dẫn động làm quay bánh xe dẫn hướng.
Tỷ số truyền của cơ cấu lái này có giá trị không đ‚i và được xác định theo công thức: 2. .r0 ic t Trong đó:
r0: Bán kính ban đzu của cung răng; t: Bước của trục vít.
Hiệu suất thuận vào kho{ng 0,7 hiệu suất nghịch vào kho{ng 0,85. Do hiệu suất
nghịch cơ cấu lái loại liên hợp lớn cho nên khi lái trên đường mấp mô sy nặng
nhọc, nhưng nó có kh{ năng làm cho ôtô chạy ‚n định w hướng th|ng nvu vì một
nguyên nhân nào đó làm bánh xe ph{i quay vòng.
Hình 8: Cơ cấu lái kiểu trc vít ecubi – thanh răng – cung răng
1. V† cơ cấu lái 6. Phớt
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 15
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
2. Ổ bi dưới 7. Đai ốc điều ch•nh
3. Trục vít 8. Đai ốc h„m
4. Êcu bi 9. Bánh răng rẻ quạt 5. Ổ bi trên 10. Bi
Cơ cấu lái ki}u trục vít – êcu bi – thanh răng – cung răng có đặc đi}m n‚i bật là
có kh{ năng làm việc dự tr~ rất lớn, vì vậy nó được dŠng chủ yvu trên các loại ôtô cỡ lớn.
Cơ cấu lái ki}u trục vít – êcu bi – thanh răng – cung răng có ưu đi}m lực c{n
nh†, ma sát gi~a trục vít và trục rẻ quạt nh† (ma sát lăn).
2.4. Góc đặt bánh xe
Đ} tránh trường hợp người lái vẫn ph{i tác động liên tục lên vô lăng đ} gi~ xe w
trạng thái chạy th|ng hoặc người lái ph{i tác dụng một lực lớn đ} quay vòng xe,
các bánh xe được l…p vào thân xe với các góc nhất định. Nh~ng góc này được gọi
chung là góc đặt bánh xe.
Nvu các góc đặt bánh xe không đúng thì có th} dẫn đvn các hiện tượng sau: Khó lái; Tính ‚n định lái kém;
Tr{ lái trên đường vòng kém;
Tu‚i thọ lốp gi{m (mòn nhanh).
2.4.1. Góc nghiêng ngang của bánh xe (Camber)
Góc tạo bwi đường tâm của bánh xe dẫn hướng w vị trí th|ng đứng với đường
tâm của bánh xe w vị trí nghiêng được gọi là góc Camber và đo bằng độ. Khi
bánh xe dẫn hướng nghiêng ra ngoài thì gọi là góc “Camber dương” và ngược lại
gọi là góc “Camber âm”. Bánh xe không nghiêng thì Camber bằng không (bánh xe th|ng đứng).
Chức năng của góc Camber:
Nh~ng năm về trước bánh xe được đặt với góc Camber dương đ} c{i thiện
độ bền của czu trước và đ} các lốp tivp xúc vuông góc với mặt đường (do
trọng lượng của xe) nhằm ngăn ngừa sự mòn không đều của lốp trên
đường, do có phzn gi~a cao hơn hai bên;
Góc camber còn đ{m b{o sự lăn th|ng của các bánh xe, gi{m va đập của
mép lốp với mặt đường. Khi góc Camber bằng không hoặc gzn bằng
không có ưu đi}m là khi đi trên đường vòng bánh xe nằm trong vŠng có
kh{ năng truyền lực dọc và lực bên tốt nhất;
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 16
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Hình 9: Góc nghiêng ngang của bánh xe
Góc Camber ngăn ngừa kh{ năng bánh xe bị nghiêng theo chiều ngược lại
dưới tác động của trọng lượng xe do các khe hw và sự bivn dạng trong các
chi tivt của trục trước và hệ thống treo trước. Đƒng thời gi{m cánh tay
đòn của ph{n lực tivp tuyvn với trục trụ đứng, đ} là gi{m mô men tác
dụng lên dẫn động lái và gi{m lực lên vành tay lái;
Khi chuy}n động trên đường vòng, do tác dụng của lực ly tâm thân xe
nghiêng theo hướng quay vòng, các bánh xe ngoài nghiêng vào trong, các
bánh xe trong nghiêng ra ngoài so với thân xe. Đ} các bánh xe lăn gzn
vuông góc với mặt đường đ} tivp nhận lực bên tốt hơn, trên xe có tốc độ
cao, hệ treo độc lập thì góc Camber thường âm.
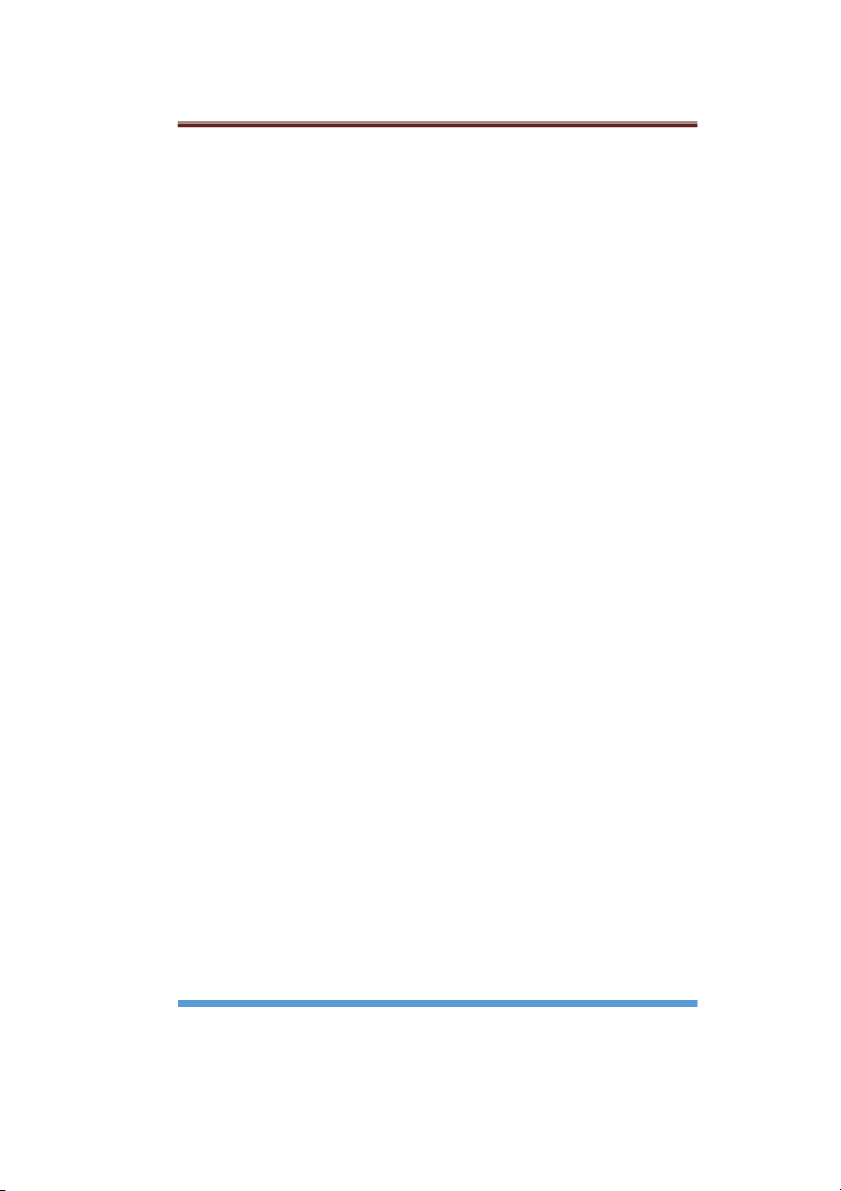
2.4.2. Góc nghiêng dọc tr đứng v chế độ lệch dọc (Caster v khoảng Caster)
Hình 10: Góc nghiêng tr đứng v chế độ lệch dọc
Góc nghiêng dọc của trụ đứng là sự nghiêng về phía trước hoặc phía sau của
trụ đứng. Nó được đo bằng độ và được xác định bằng góc gi~a trụ xoay đứng và
phương th|ng đứng khi nhìn từ cạnh xe. Nvu trụ xoay đứng nghiêng về phía sau
thì gọi là góc nghiêng dương và ngược lại gọi là góc nghiêng âm.
Kho{ng cách từ giao đi}m của đường tâm trục đứng với mặt đất đvn đường tâm
vŠng tivp xúc gi~a lốp và mặt đường được gọi là kho{ng Caster C.
Chức năng của góc Caster:
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 17
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Hƒi vị bánh xe do kho{ng Caster: Dưới tác dụng của lực ly tâm khi bánh
xe vào đường vòng hoặc lực do gió bên hoặc thành phzn của trọng lượng
xe khi xe đi vào đường nghiêng, w khu vực tivp xúc của bánh xe với mặt
đường sy xuất hiện các ph{n lực bên Yb;
Khi trụ quay đứng được đặt nghiêng về phía sau một góc nào đó so với
chiều tivn của xe (Caster dương) thì ph{n lực bên Y của b đường sy tạo với
tâm tivp xúc một mô men ‚n định, mô men đó được xác định bằng công thức sau: M=Yb.c
Mô men này có xu hướng làm bánh xe trw lại vị trí trung gian ban đzu khi
nó bị lệch kh†i vị trí này. Nhưng khi quay vòng người lái ph{i tạo ra một
lực đ} kh…c phục mô men này. Vì vậy, góc Caster thường không lớn. Mô
men này phụ thuộc vào góc quay vòng của bánh xe dẫn hướng. Đối với
các xe hiện đại thì trị số của góc Caster bằng kho{ng từ 0 đvn 3 0 0.
2.4.3. Góc nghiêng ngang tr đứng (Kingpin)
Góc nghiêng ngang trụ đứng được xác định trên mặt c…t ngang của xe. Góc
Kingpin được tạo nên bwi hình chivu của đường tâm trụ đứng trên mặt c…t ngang
đó và phương th|ng đứng.
Chức năng của góc Kingpin:
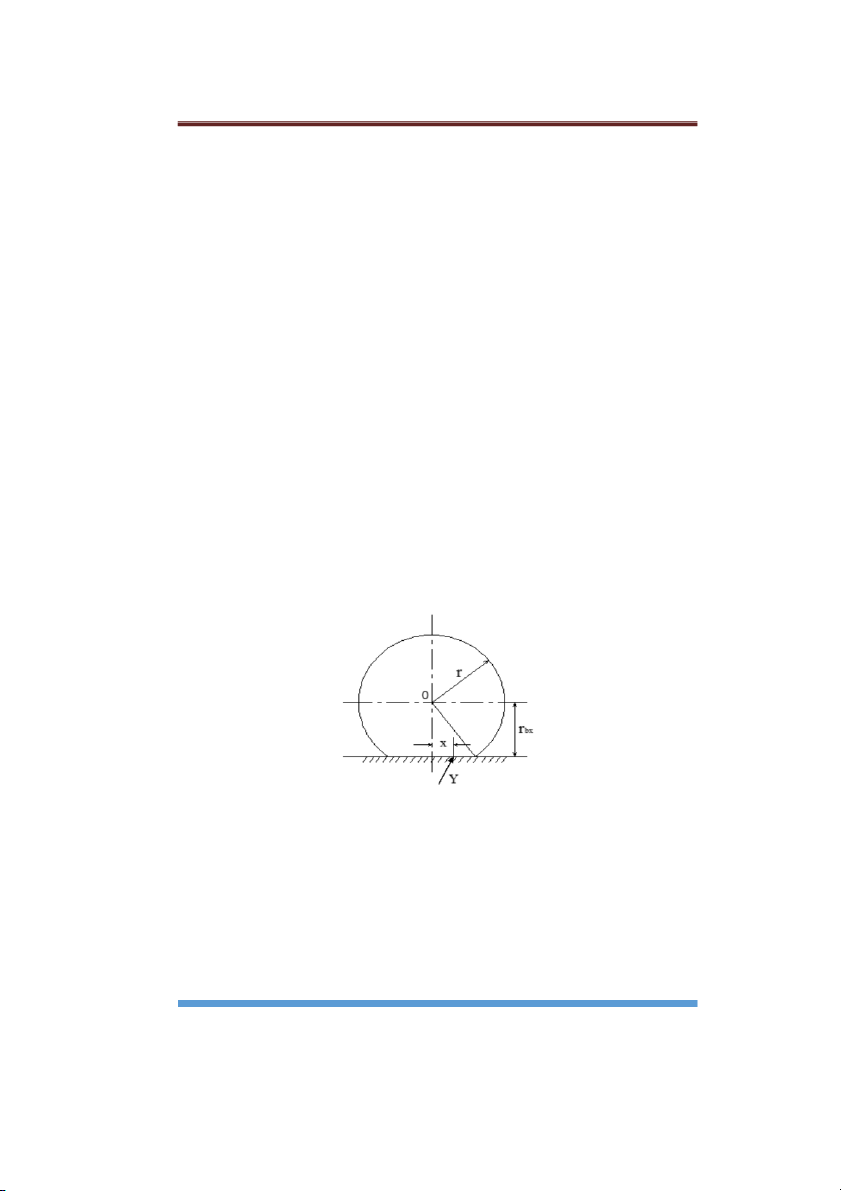
Gi{m lực đánh lái: Khi bánh xe quay sang ph{i hoặc quay quanh trụ đứng
với kho{ng lệch tâm là bán kính r0, r0 là bán kính quay của bánh xe quanh
trụ đứng, nó là kho{ng cách đo trên bề mặt của đường cong mặt ph|ng
nằm ngang của bánh xe gi~a đường kéo dài đường tâm trụ quay đứng với
tâm của vvt tivp xúc của bánh xe với mặt đường. Nvu r0 lớn sy sinh ra mô
men lớn quanh trụ quay đứng do sự c{n lăn của lốp, vì vậy làm tăng lực
đánh lái. Do vậy giá trị của r0 có th} được gi{m đ} gi{m lực đánh lái,
phương pháp đ} gi{m r 0 là tạo Camber dương và làm nghiêng trụ quay
đứng tức là tạo góc KingPin;
Hình 11: Góc nghiêng ngang tr đứng
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 18
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Gi{m sự đẩy ngược và kéo lệch sang một phía: Nvu kho{ng cách lệch r0
quá lớn, ph{n lực tác dụng lên các bánh xe khi chuy}n động th|ng hay khi
phanh sy sinh ra một mô men quay quanh trụ đứng, do vậy sy làm các
bánh xe bị kéo sang một phía có ph{n lực lớn hơn. Các va đập từ mặt
đường tác dụng lên các bánh xe làm cho vô lăng dao động mạnh và bị đẩy ngược lại;
C{i thiện tính ‚n định khi chạy th|ng: Góc KingPin sy làm cho các bánh
xe tự động quay về vị trí chạy th|ng sau khi quay vòng. Tức là khi quay
vòng, quay vô lăng đ} quay vòng xe, người lái ph{i tăng lực đánh lái, nvu
b† lực tác dụng lên vô lăng thì bánh xe tự tr{ về vị trí trung gian (vị tri đi
th|ng). Đ} gi~ cho xe quay vòng thì czn thivt ph{i gi~ vành lái với một
lực nhất định nào đó. Vấn đề trw về vị trí th|ng sau khi quay vòng là do có
mômen ph{n lực (gọi là mômen ngược) tác dụng từ mặt đường lên bánh
xe. Giá trị của mômen ngược phụ thuộc vào độ lớn của góc KingPin.
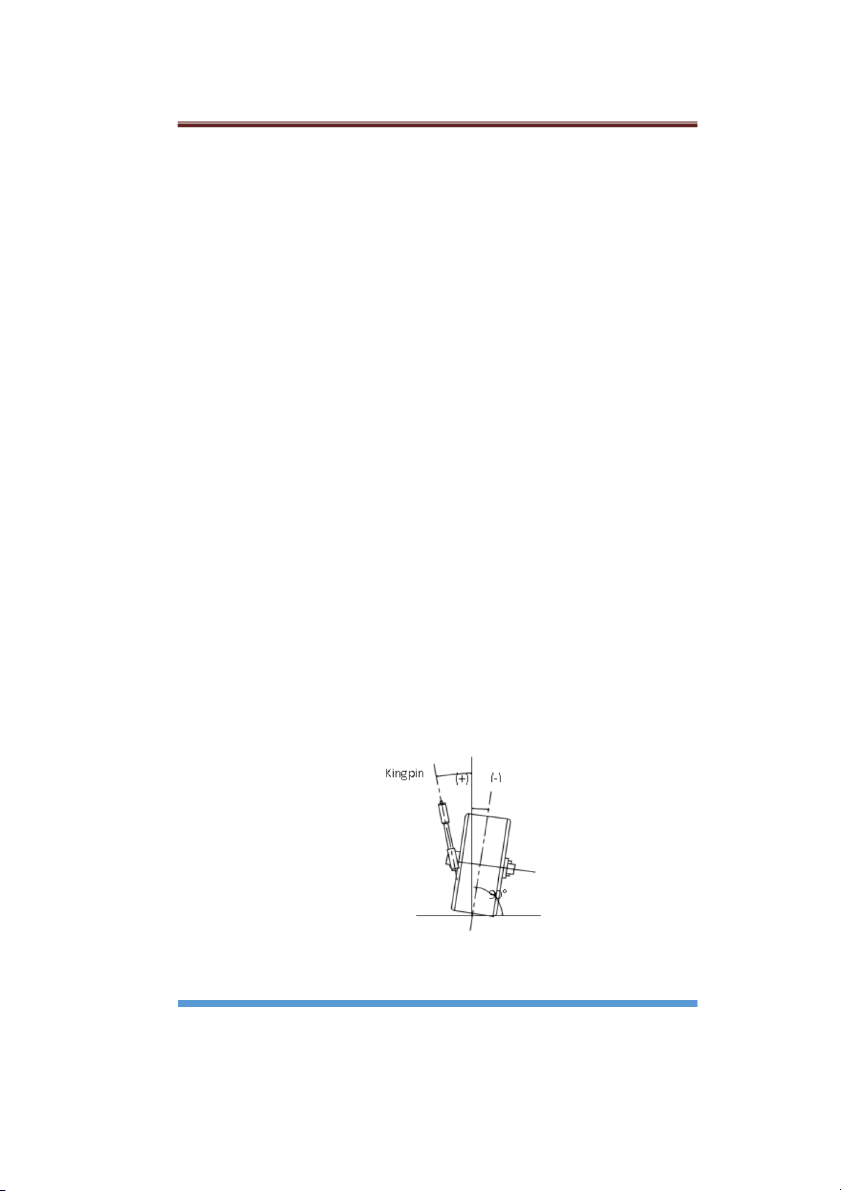
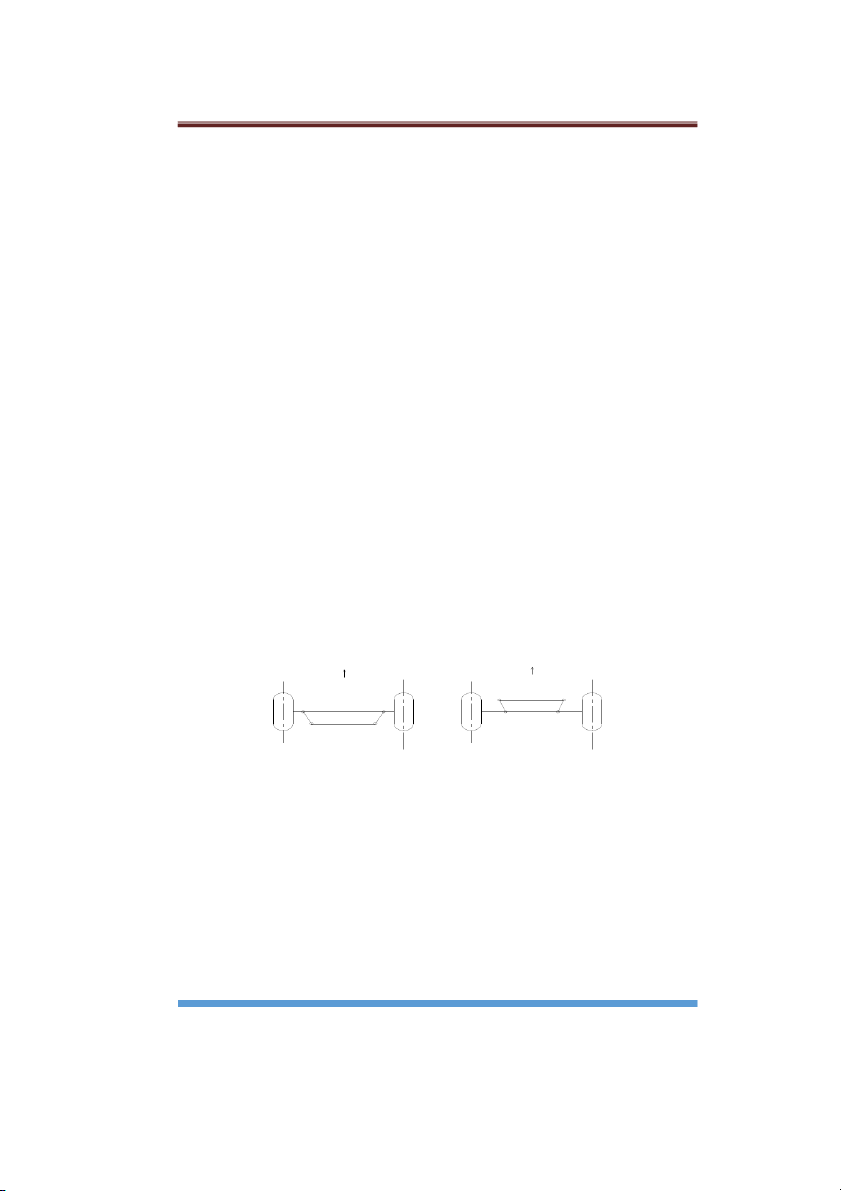
2.4.4. Độ chm v độ mơ (góc doãng)
Độ chụm của bánh xe là thông số bi}u thị góc chụm của 2 bánh xe dẫn hướng
(hoặc hai bánh xe trên cŠng một czu xe), góc chụm là góc xác định trên một mặt
ph|ng đi qua tâm trục nối hai bánh xe và song song với mặt ph|ng đường tạo bwi
hình chivu mặt ph|ng đối xứng dọc trục của hai bánh xe lên mặt ph|ng đó và
hướng chuy}n động của xe.
Thông thường độ chụm được bi}u diễn bằng kho{ng cách B - A. Kích thước B,
A được đo w mép ngoài của vành lốp w trạng thái không t{i khi xe đi th|ng. Độ
chụm là dương nvu B - A > 0, là âm nvu B - A < 0.
Độ chụm có {nh hưwng lớn tới sự mài mòn của lốp và ‚n định của vành tay lái.
Sự mài mòn lốp x{y ra là nh† nhất trong trường hợp hai bánh xe lăn ph|ng hoàn toàn. Hình 12: Độ chm
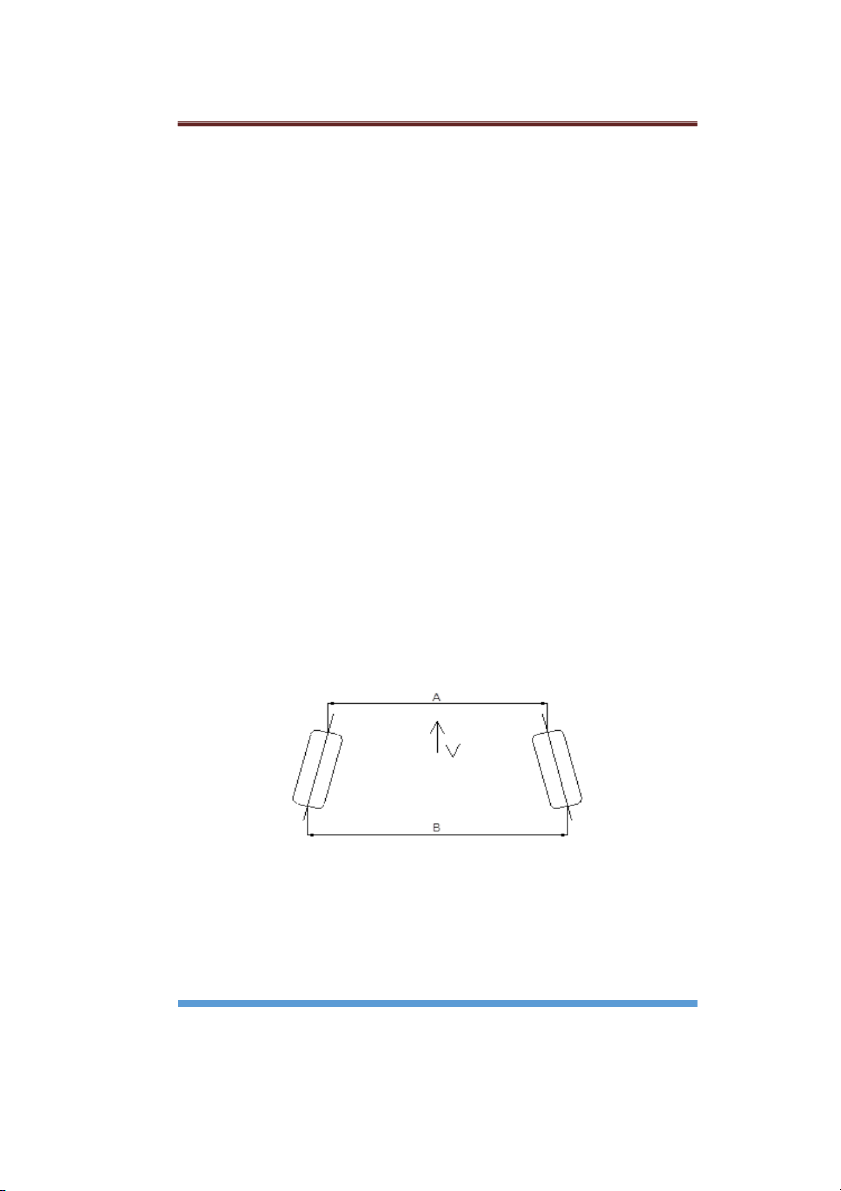
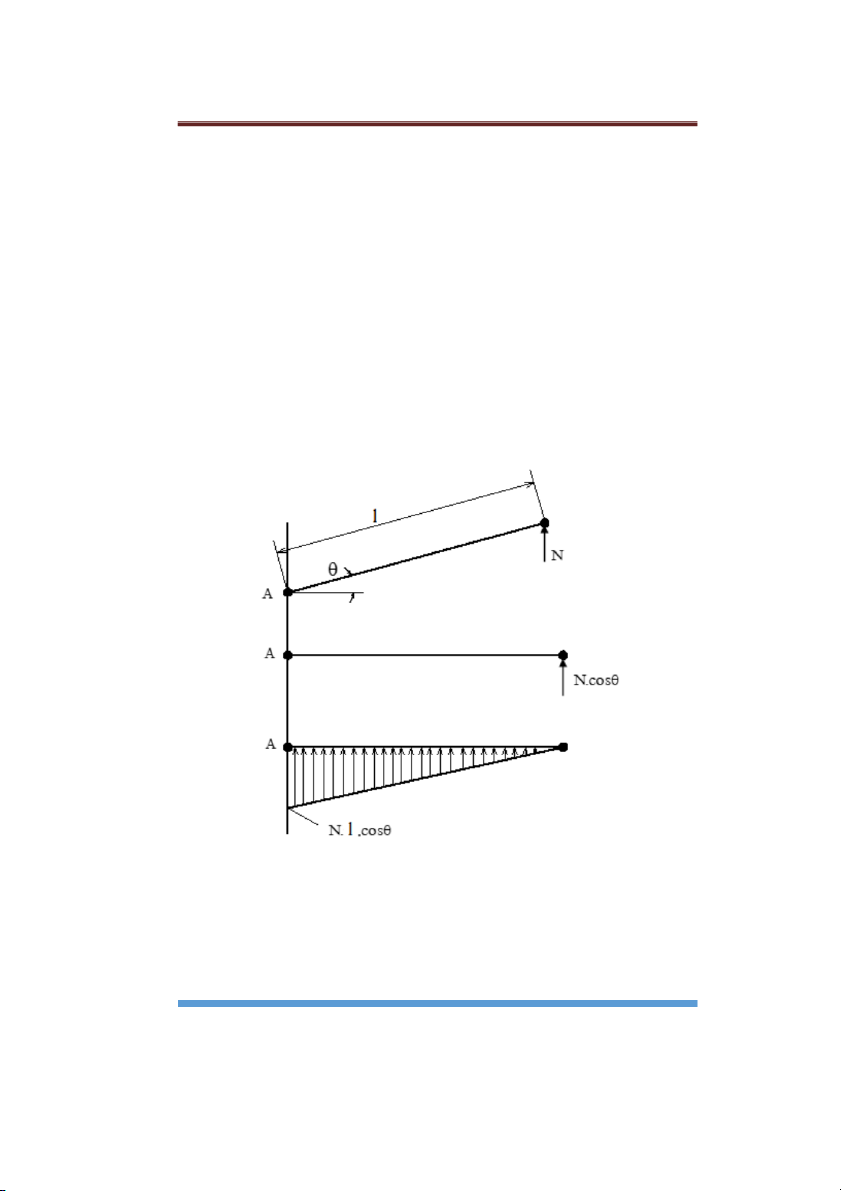
Quá trình lăn của bánh xe g…n liền với sự xuất hiện lực c{n lăn Pf ngược chiều
chuy}n động đặt tại chỗ tivp xúc của bánh xe với mặt đường. Lực Pf này đặt cách
trụ quay đứng một đoạn R 0và tạo nên một mô men quay với tâm trụ quay đứng.
Mô men này tác dụng vào hai bánh xe và ép hai bánh xe về phía sau. Đ} lăn
ph|ng thì các bánh xe đặt với độ chụm = B – A dương. Với góc như thv thì tạo
lên sự ‚n định chuy}n động th|ng của xe tức là ‚n định vành tay lái.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 19
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Hình 13: Lực cản lăn v vị trí đặt của nó
Ở czu dẫn hướng, lực kéo cŠng chiều với chiều chuy}n động sy ép bánh xe về
phía trước. Bwi vậy góc gi{m. Trong trường hợp này, đ} gi{m {nh hưwng của lực
c{n lăn và lực phanh và đƒng thời gi{m tốc độ của động cơ đột ngột (phanh bằng
động cơ), thì bố trí các bánh xe với góc đặt có giá trị nh† hơn hoặc bằng không.
2.4.5. Bán kính quay vòng (góc bánh xe, bán kính quay vòng)
Khi vào đường cong, đ{m b{o các bánh xe dẫn hướng không bị trượt lvt hoặc
trượt quay thì đường vuông góc với véctơ vận tốc chuy}n động của tất c{ các
bánh xe ph{i gặp nhau tại một đi}m, đi}m đó gọi là tâm quay tức thời của xe.
Đ} đạt được góc lái chính xác của bánh dẫn hướng bên ph{i và bên trái thì các
thanh dẫn động lái thực hiện chức năng này cũng đƒng thời đạt được bán kính quay vòng mong muốn.
Hình 14: Sự trượt bên khi quay vòng
Sự quay vòng của xe kèm theo lực ly tâm, lực này có xu hướng b…t xe quay
với bán kính lớn hơn bán kính dự định của người lái trừ khi xe có th} sinh ra một
lực ngược lại đủ lớn đ} cân bằng với lực ly tâm. Lực này là lực hướng tâm. Lực
hướng tâm sinh ra bwi sự bivn dạng và sự trượt bên của lốp do ma sát gi~a lốp và
mặt đường, lực này là lực quay vòng và làm ‚n định xe khi quay vòng.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 20
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
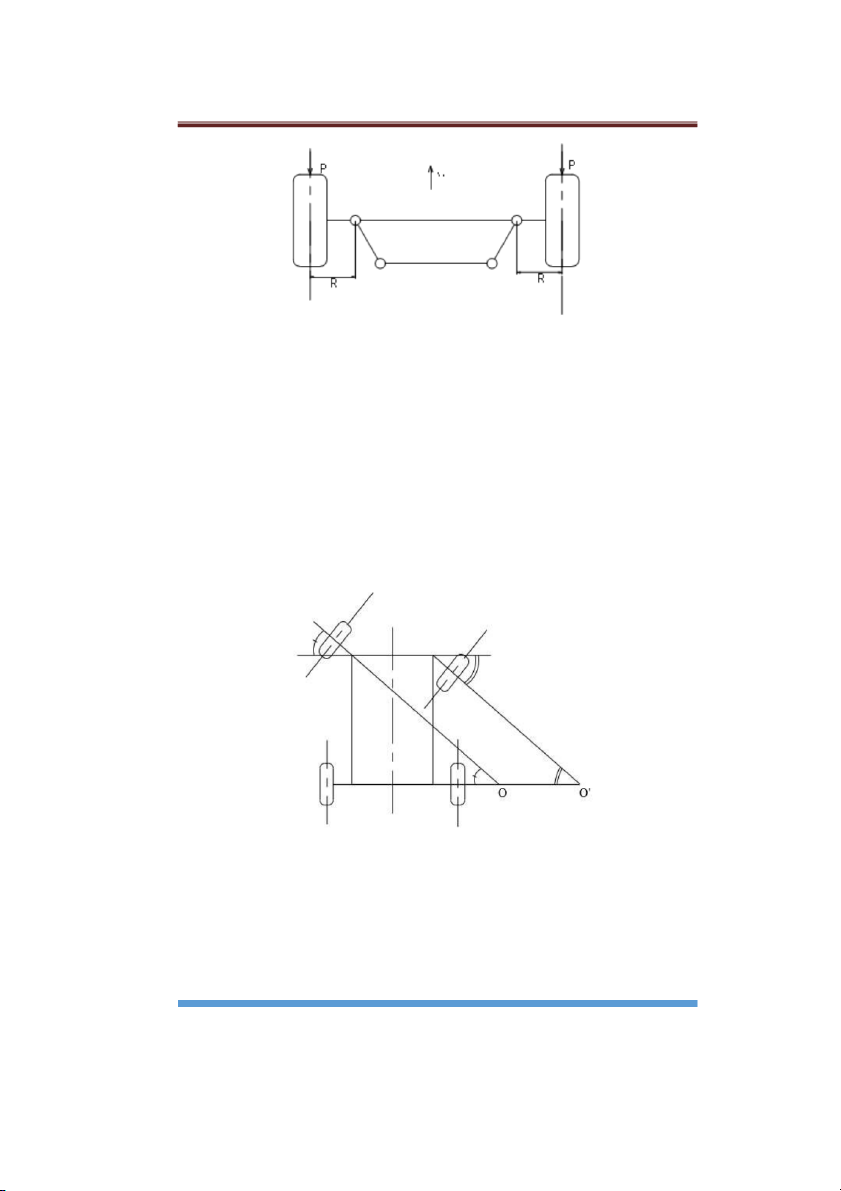
Hình 15: Sơ đồ quay vòng 2.5. Dẫn động lái
Dẫn động lái gƒm nh~ng chi tivt truyền lực từ cơ cấu lái đvn ngõng quay của
bánh xe. Dẫn động lái ph{i đ{m b{o các chức năng sau:
Nhận chuy}n động từ cơ cấu lái tới các bánh xe dẫn hướng;
Đ{m b{o quay vòng của các bánh xe dẫn hướng sao cho không x{y
ra hiện tượng trượt bên lớn w tất c{ các bánh xe, đƒng thời tạo liên
kvt gi~a các bánh xe dẫn hướng;
Phzn t€ cơ b{n của dẫn động lái là hình thang lái tạo bwi czu trước,
đòn kéo ngang và đòn kéo bên. Nhờ hình thang lái nên khi vô lăng
quay vòng một góc thì các bánh xe dẫn hướng sy quay đi một góc
nhất định. Hình thang lái có thề bố trí trước hoặc sau czu dẫn
hướng tŠy theo bố trí chung.
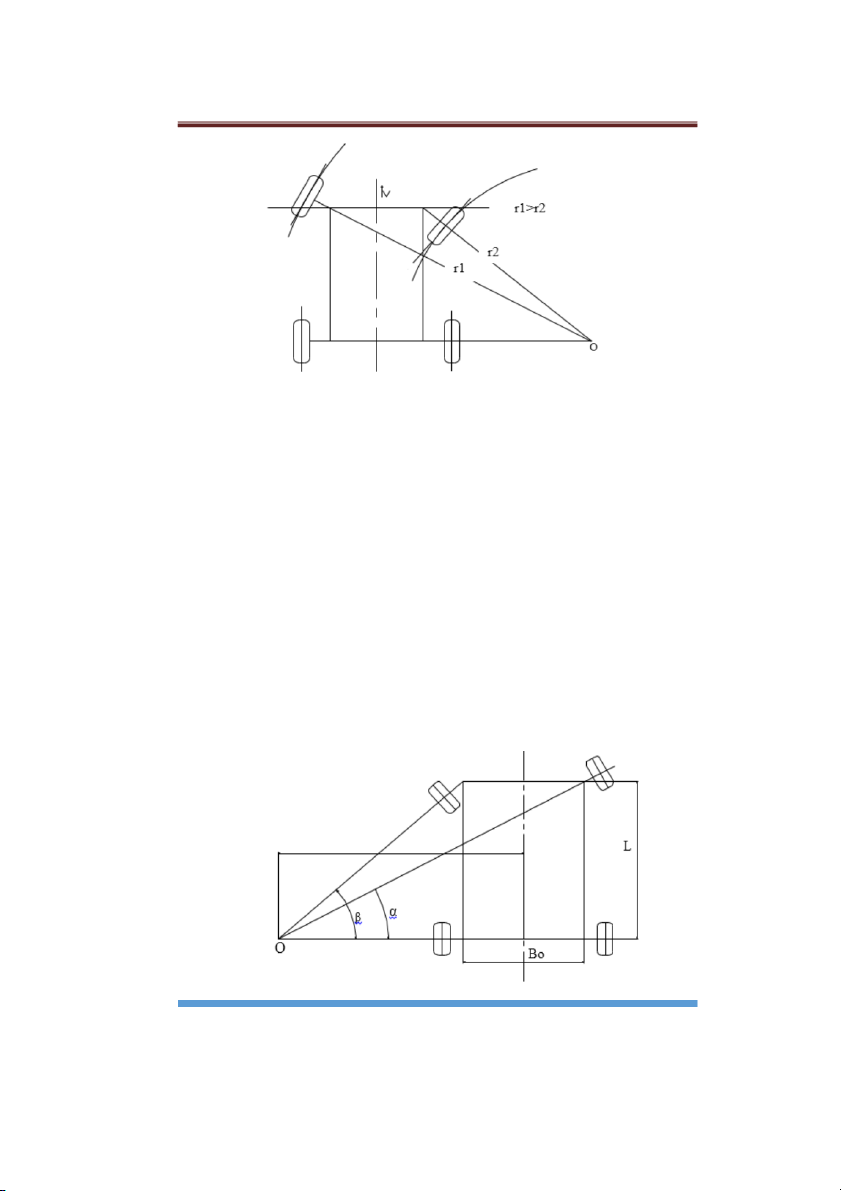
Quan hệ hình học ACKERMAN:
Quan hệ hình học ACKERMAN bi}u thị quan hệ góc quay của các bánh xe dẫn
hướng quanh trục đứng với gi{ thivt tâm quay tức thời của xe nằm trên đường
kéo dài của tâm trục czu sau.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 21
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Hình 16: Quan hệ hình học của ACKERMAN
Đ} thực hiện quay vòng đúng thì các bánh xe dẫn hướng (trên cŠng một czu)
ph{i quay vòng theo các góc α, β khác nhau và quan hệ hình học được xác định theo bi}u thức sau: Cotgβ – Cotgα = Trong đó:
L: chiều dài cơ sw của xe;
B0: kho{ng cách của hai đường tâm trụ quay đứng trong mặt ph|ng đi qua tâm
trục bánh xe và song song với mặt đường;
α, β: góc quay của bánh xe dẫn hướng phía trong và phía ngoài.
Đ} đ{m b{o điều kiện (1), trên xe s€ dụng cơ cấu lái hình thang lái 4 khâu gọi là
hình thang lái Đantô. Hình thang lái Đantô ch• áp dụng gzn đúng điều kiện trên,
xong do kvt cấu đơn gi{n nên được dŠng rất ph‚ bivn. Mỗi một chủng loại xe có
kích thước và vị trí đòn của cơ cấu 4 khâu sao cho sai lệch trong quan hệ hình
học của cơ cấu lái 4 khâu với quan hệ hình học ACKERMAN ch• nằm w góc
quay bánh xe dẫn hướng lớn. Giá trị sai lệch so với lý thuyvt từ 0030’ đvn 10 khi
bánh xe dẫn hướng w vŠng quay vòng gấp.
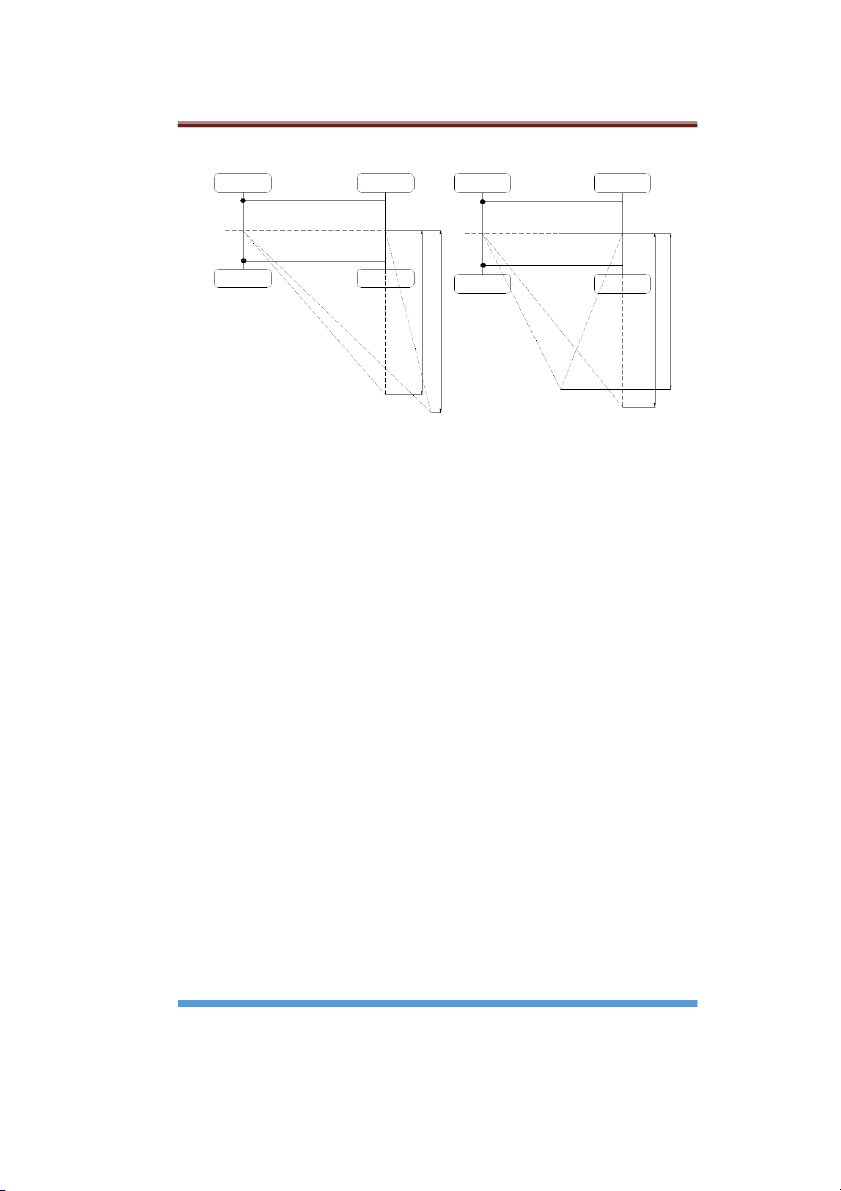
Đối với dzm czu liền, hệ thống treo phụ thuộc thì cấu tạo của hình thang lái Đantô như sau:
Dzm czu đứng đóng vai trò là một khâu cố định, hai đòn bên dẫn động các bánh
xe,đòn ngang liên kvt với các đòn bên bằng nh~ng khớp czu ( rotuyl lái ). Các
đòn bên quay quanh đường tâm trụ đứng ( Hình 17). v v § ßn kÐo ngang DÇm cÇu liÒn a) b)
Hình 17: Cơ cấu 4 khâu khi có dm cu liền
a) Đòn kéo ngang khi có dzm czu liền
b) Đòn kéo ngang nằm trước dzm czu
Trên hệ thống treo độc lập, số lượng các đòn và khớp tăng lên nhằm đ{m b{o
các bánh xe dịch chuy}n độc lập với nhau.
Số lượng các đòn tăng lên tŠy thuộc vào kvt cấu của cơ cấu lái, vị trí bố trí cơ
cấu lái, dẫn động lái và hệ thống treo nhưng vẫn đ{m b{o quan hệ hình học
ACKERMAN, tức gzn đúng với hình thang lái Đantô. Hai phương pháp bố trí
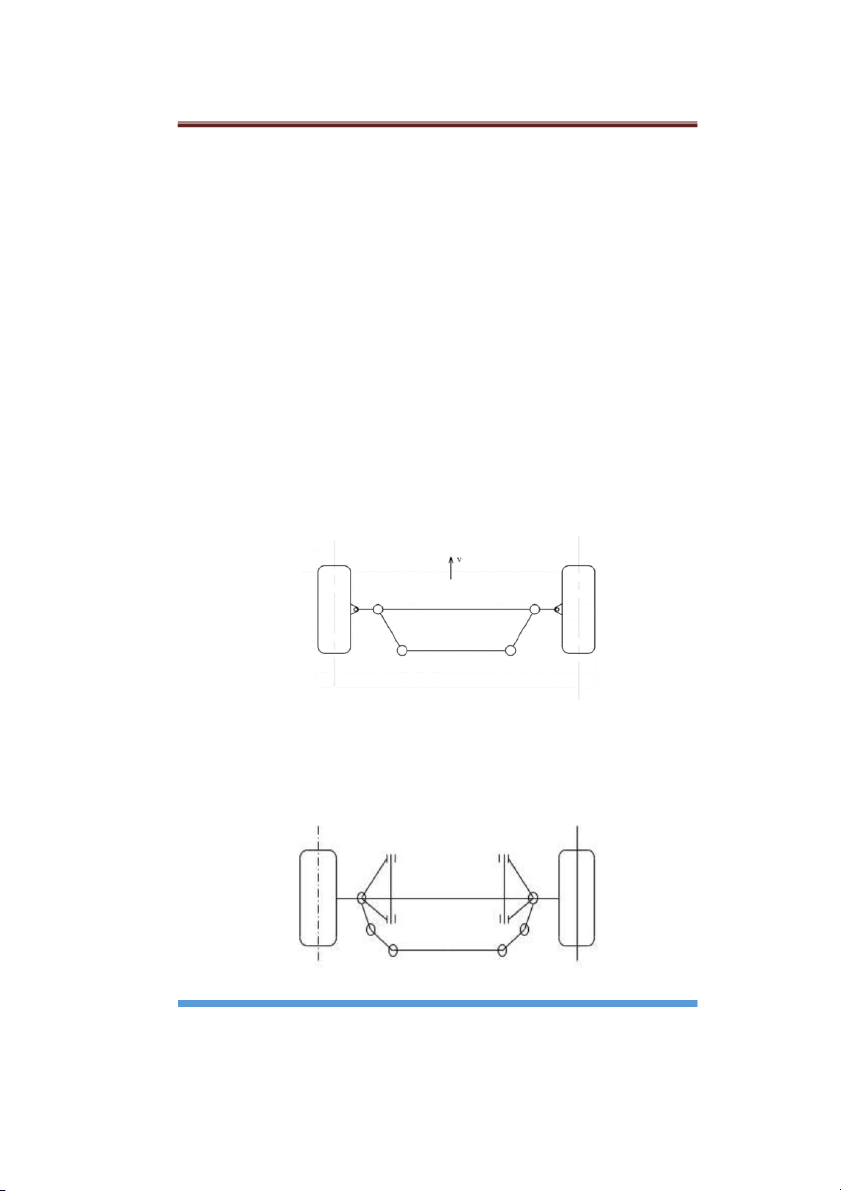
dẫn động lái đi}n hình w hệ thống treo độc lập được trình bày theo hình 18.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 22
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Hình 18: Cơ cấu đòn ngang nối liên kết với hệ thống treo độc lập
a. Đòn ngang nối nằm sau dzm czu
b. Đòn ngang nối nằm trước dzm czu
Một số xe t{i hạng nặng dŠng dẫn động lái hai czu trước tức 4 bánh dẫn hướng
và hai hình thang lái 4 khâu Đantô.
Hình 19: Bố trí hai cu trước dẫn hướng
Trong các kvt cấu hiện nay, tỷ số truyền dẫn động lái thường nằm trong kho{ng từ 0.85 đvn 1.1.
2.6. Hệ thống lái có trợ lực
2.6.1. Công dng v sự cn thiết của hệ thống trợ lực lái
Trợ lực của hệ thống lái có tác dụng gi{m nhẹ cường độ lao động của người lái.
Trên xe có tốc độ cao, trợ lực lái còn nâng cao tính an toàn chuy}n động khi xe
có sự cố w bánh xe và gi{m va đập truyền từ bánh xe lên vành tay lái. Ngoài ra đ}
c{i thiện tính êm dịu chuy}n động, phzn lớn các xe hiện đại đều dŠng lốp b{n
rộng, áp suất thấp đ} tăng diện tích tivp xúc với mặt đường. Kvt qu{ là czn một lực lái lớn hơn.
Vì vậy đ} gi~ cho hệ thống lái nhanh nhạy trong khi ch• czn lực lái nh†, ph{i có
một vài loại thivt bị trợ giúp hệ thống lái gọi là trợ lực lái.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 23
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
2.6.2. Phân loi hệ thống trợ lực lái
Dựa vào kvt cấu và nguyên lý của van phân phối:
Hệ thống lái trợ lực ki}u van trụ tịnh tivn;
Hệ thống lái trợ lực ki}u van cánh.
Dựa vào vị trí của van phân phối và xy lanh lực:
Hệ thống lái trợ lực ki}u van phân phối, xy lanh lực đặt chung trong cơ cấu lái;
Hệ thống lái trợ lực ki}u van phân phối, xy lanh lực đặt riêng;
Hệ thống lái trợ lực ki}u van phân phối, xy lanh lực kvt hợp trong đòn kéo.
Hiện nay dạng bố trí thông dụng nhất trên hệ thống lái của xe là van phân phối,
xy lanh lực và cơ cấu lái đặt chung. Còn nguƒn năng lượng là một bơm cánh gạt
được dẫn động từ động cơ của xe nhờ dây đai.
2.6.3. Nguyên lý trợ lực lái
Trợ lực lái là một thivt bị thủy lực s€ dụng công xuất của động cơ đ} gi{m nhẹ
lực lái. Động cơ dẫn động bơm tạo ra dzu cao áp tác dụng lên piston nằm trong
xy lanh lực. Piston trợ giúp cho việc chuy}n động của thanh răng. Mức độ trợ
giúp phụ thuộc vào độ lớn của áp suất dzu tác dụng lên piston. Vì vậy nvu czn trợ
lực lớn hơn thì ph{i tăng áp suất dzu.
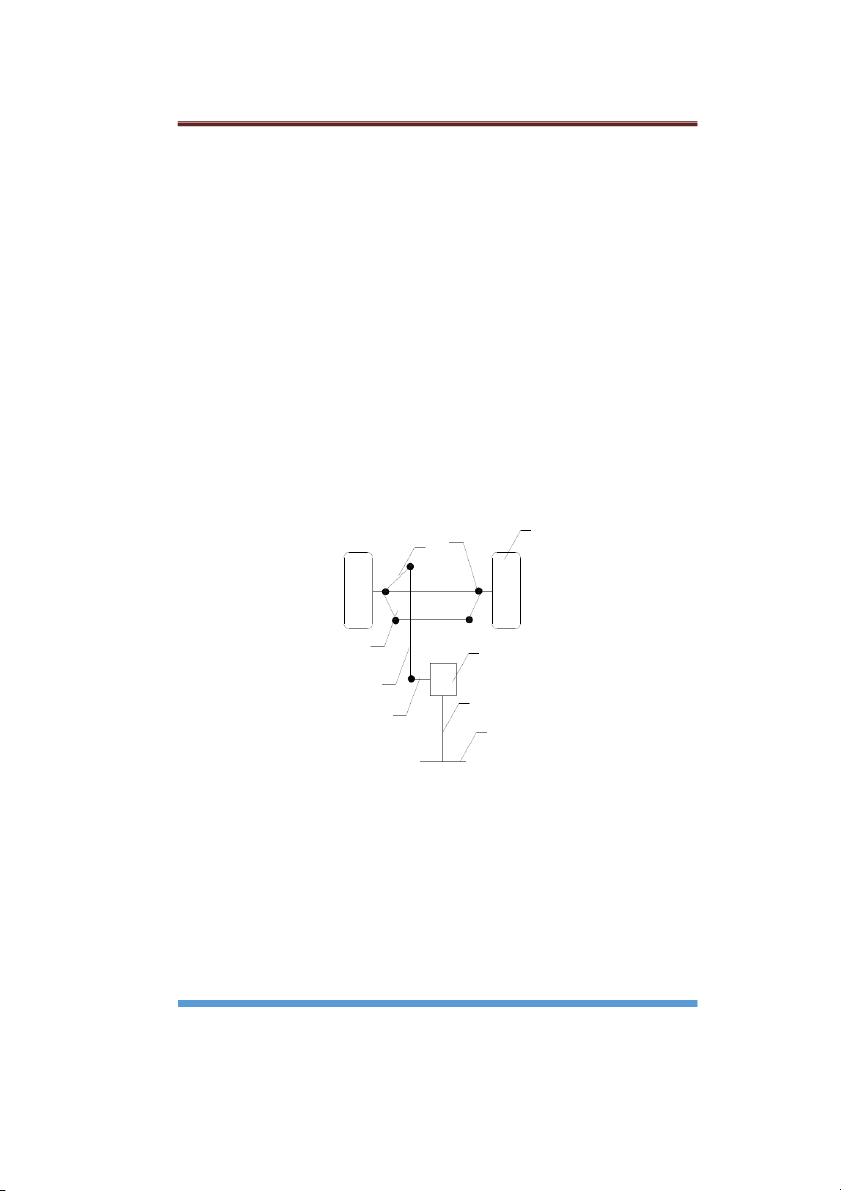
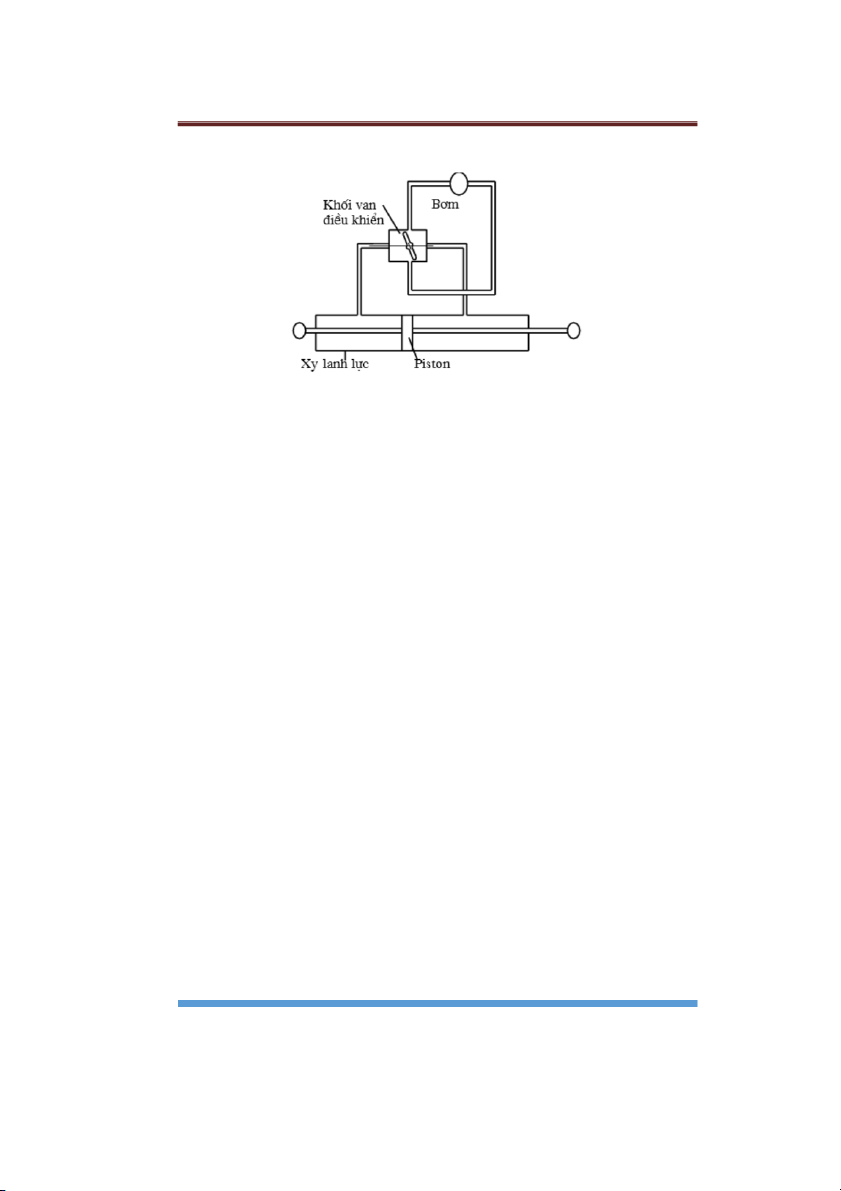
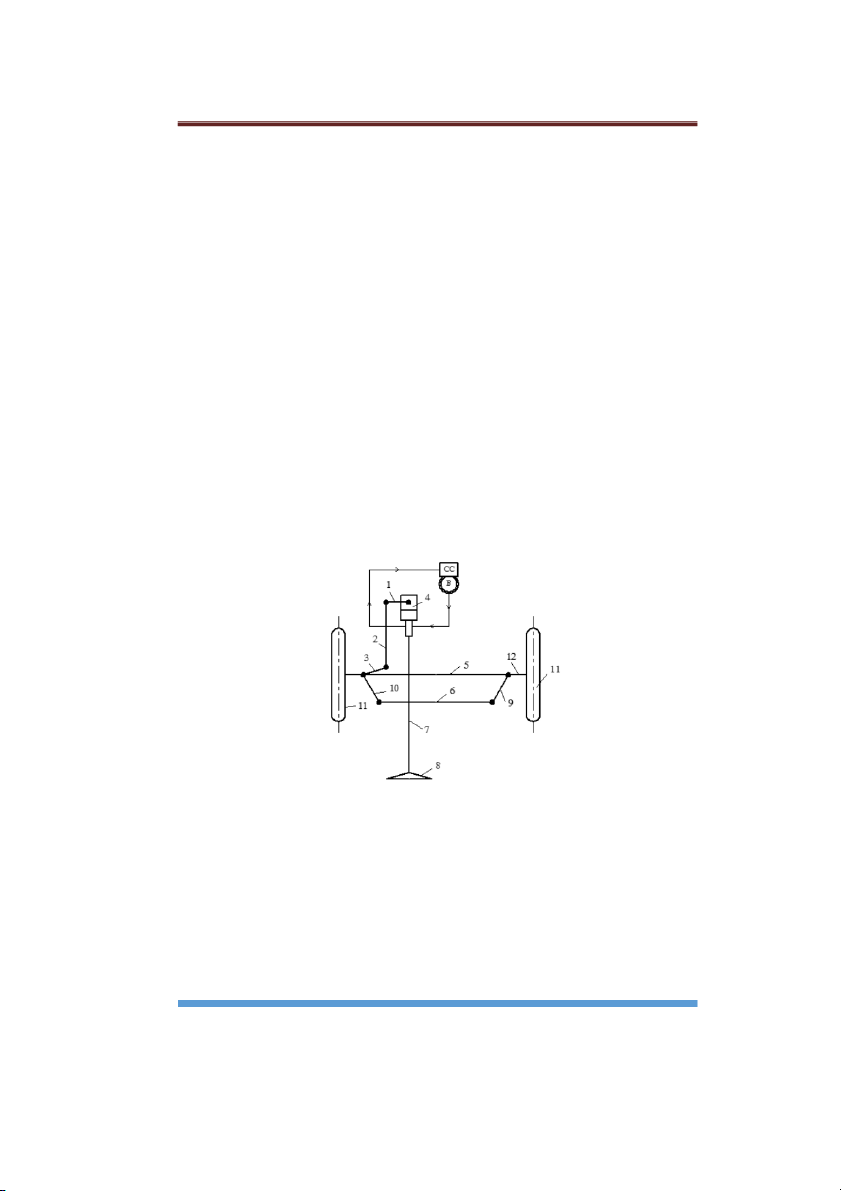
2.6.3.1. Vị trí trung gian (khi xe chuyển động thẳng)
Hình 20: Sơ đồ nguyên lý trợ lực lái ơ vị trí trung gian
Dzu từ bơm được đẩy lên van điều khi}n. Nvu van w vị trí trung gian, tất c{ dzu
sy ch{y qua van vào c€a x{ và hƒi về bơm. Vì áp suất dzu bên trái và bên ph{i
piston là như nhau nên piston không chuy}n động về hướng nào.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 24
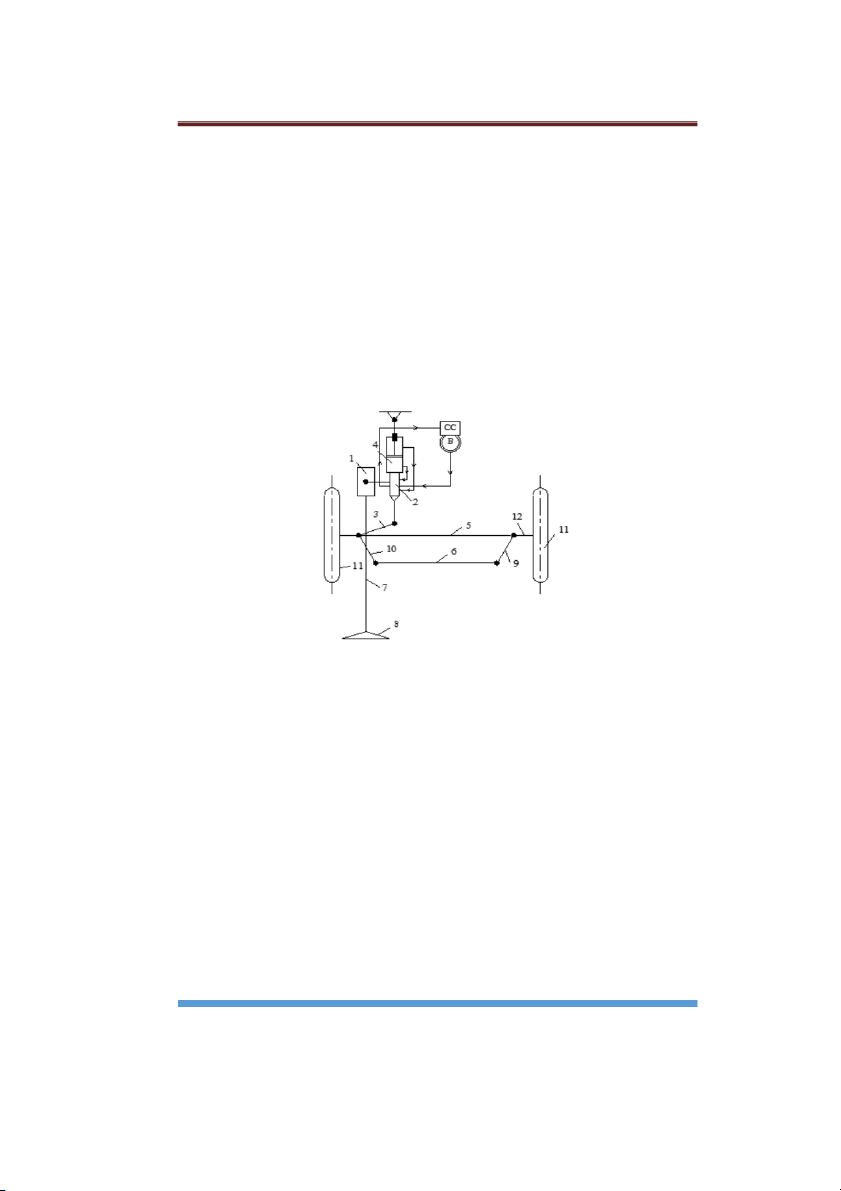
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI 2.6.3.2. Khi quay vòng
Hình 21: Sơ đồ nguyên lý trợ lực lái khi quay vòng
Khi trục lái chính quay theo bất kỳ hướng nào, gi{ s€ quay sang ph{i thì van
điều khi}n cũng di chuy}n làm đóng một phzn c€a dzu, còn c€a kia mw rộng hơn.
Vì vậy làm thay đ‚i lượng dzu vào các c€a, cŠng lúc đó áp suất dzu được tạo ra.
Như vậy tạo ra sự chênh lệch áp suất gi~a hai khoang trái và ph{i của piston. Sự
chênh lệch áp suất đó làm piston dịch chuy}n về phía có áp suất thấp, dzu bên áp
suất thấp sy được đẩy qua van điều khi}n về bơm. CHƯƠNG II
PHÂN TÍCH LỰA CHỌN PHƯƠNG N THIT K
1. Phân tích lựa chọn phương án thiết kế cơ cấu lái
1.1. Bánh răng – thanh răng Ưu điểm:
Cơ cấu lái đơn gi{n gọn nhẹ. Do cơ cấu lái nh† và b{n thân thanh răng
tác dụng như thanh dẫn đô ng lái nên không czn các đòn kéo ngang như các cơ cấu lái khác;
Có đô nhạy cao vì ăn khớp gi~a các răng là trực tivp;
Sự c{n trượt,c{n lăn nh† và truyền mô men rất tốt nên tay lái nhẹ;
Có kh{ năng tự đô ng triê t tiêu khe hw tại chỗ ăn khớp. T• số truyền
thuâ n và nghịch bằng nhau và bằng 0,8 đvn 0,9. Nhược điểm: Tỷ số truyền nh†;
Kích thước chiều dài cơ cấu lớn, thanh răng chv tạo từ thép chất lượng
cao, kích thước nh†, tuy vâ y dễ bị cong trong quá trình s€ dụng.
1.2. Trc vít – ê cubi – thanh răng – cung răng Ưu điểm:
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 25
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Ma sát gi~a trục vít và ê cu là ma sát lăn thông qua các viên bi, bwi vây
hiê u suất truyền lực cao, gi{m được sự mòn trong cơ cấu lái.
Cho phép dễ dàng kvt hợp với trợ lực lái thủy lực và được dŠng ph‚
bivn trên ô tô t{i và ô tô buýt. Nhược điểm:
Kvt cấu tương đối phức tạp dẫn đvn giá thành đ…t và s€a ch~a phức tạp hơn.
K6t luâ 8n: Với đă c đi}m của xe thivt kv là t{i xe t{i.Ta chọn cơ cấu lái loại trc
vít – ê cubi – thanh răng – cung răng.
2. Phân tích lựa chọn phương án thiết kế dẫn động lái
2.1. Dẫn động lái với hình thang lái 4 khâu Ưu điểm:
Kvt cấu đơn gi{n, đáp ứng gzn đúng quan hê lý thuyvt. Nhược điểm:
Phạm vi s€ dụng hạn chv. Được s€ dụng trên ô tô có dzm czu liền với
hai phương pháp bố trí đòn ngang là đòn ngang liên kvt nằm sau dzm
czu và nằm trước dzm czu. DŠng với hê thống treo phụ thuô c.
Hình 22: Hình thang lái 4 khâu
2.2. Dẫn động lái với hình thang lái 6 khâu
Số lượng đòn và khâu khớp tăng lên nhằm đ{m b{o các bánh xe chuy}n đô ng đô c lâ p.
Hình 23: Hình thang lái 6 khâu
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 26
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Kvt luận: Đối với xe t{i s€ dụng treo phụ thuộc. Nên ta s€ dụng hệ thống dẫn
động lái với hình thang lái 4 khâu.
3. Phân tích lựa chọn phương án cường hóa lái 3.1. Cường hóa điện Ưu điểm:
Hê thống cho phép có kh{ năng s€ lí rô ng r„i nhiều thông tin liên quan
tới kh{ năng quay vòng của ô tô, hoàn thiê n chất lượng điều khi}n và quay vòng. Nhược điểm:
Hê thống với nhiều c{m bivn phức tạp, các chương trình điều khi}n mô
tơ DC, bô ki}m soát tốc đô . Dẫn đvn giá thành cao.
3.2. Cường hóa khí nén
Trợ lực khí nén s€ dụng năng lượng trợ lực là khí nén trên ô tô. Nguƒn khí nén
trên xe có áp suất tối đa là 10 bar. Do đó kích thước xi lanh lực và van điều khi}n
thường lớn, khó bố trí trên xe và chủ yvu là sự châ m tác dụng của kvt cấu. Do
vâ y, hiê n nay hê thống trợ lực bằng khí nén ít được s€ dụng.
3.3. Cường hóa thủy lực
Cơ cấu lái, van phân phối, xi lanh lực bố trí trên cŠng mô t khối. Ưu điểm:
Có cấu tạo khá đơn gi{n, tác đô ng nhanh, hiê u suất cao.Với công nghê
chv tạo hiê n đại cho phép thivt kv được nh~ng bô trợ lực thủy lực có
kvt cấu nh† gọn. Nên được s€ dụng nhiều trên xe con và xe du lịch.
Có áp suất trong hệ thống thủy lực lớn: p = 4 ÷ 10 (MN/cm ) 2 nên gi{m
được kích thước và trọng lượng xilanh lực.
Gi{m được va đập trong truyền dẫn thủy lực do mặt đường không bằng
ph|ng nên người lái đỡ mệt. Nhược điểm:
Có nhiều chỗ tivp xúc cơ khí dẫn đvn mài mòn.
K6t luận: Chọn hệ thống lái có cơ cấu lái ki}u trc vít ê cubi – thanh răng –
cung răng, dẫn động lái với hình thang lái 4 khâu, cường hóa lái thủy lực.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 27
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI CHƯƠNG III
TÍNH TON HỆ THNG LI XE TI 2,5 TẤN – XE
THAM KHO: HUYNDAI 2,5 TẤN HD65
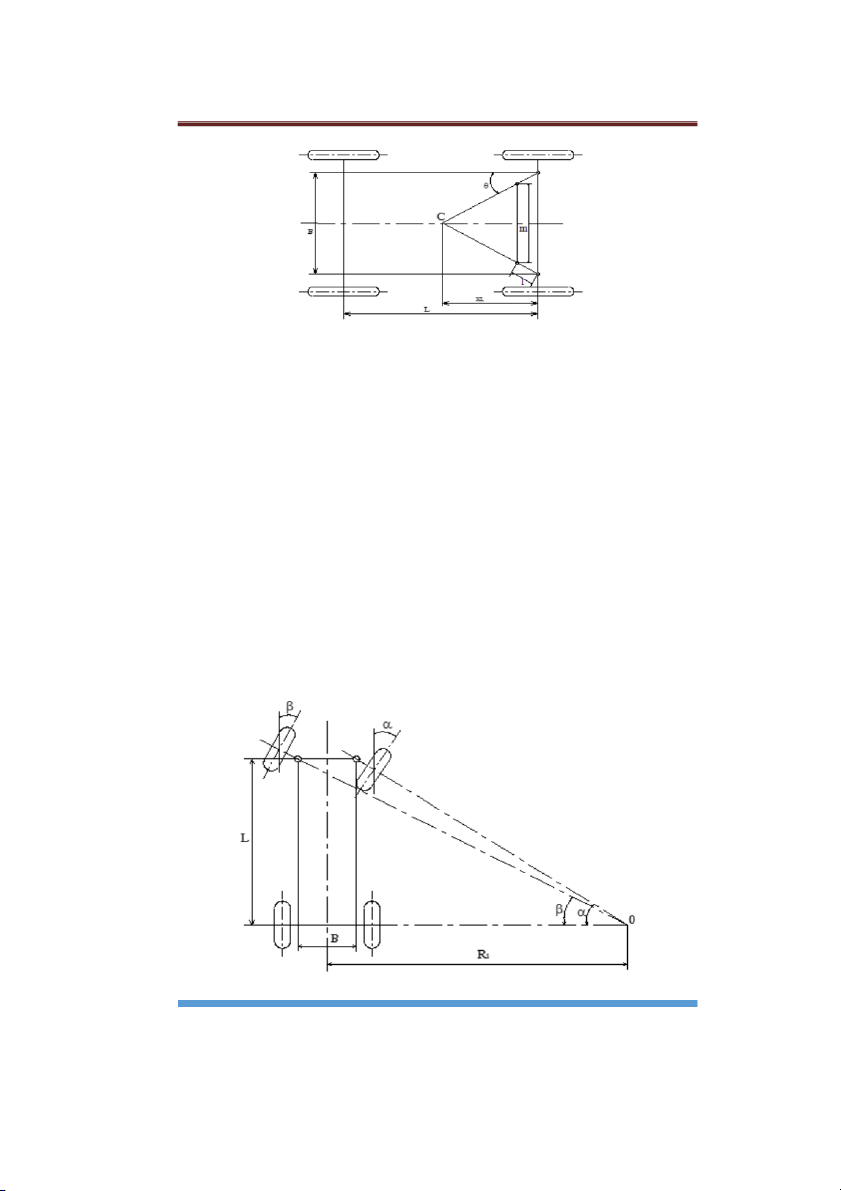
Các số liệu thiết kế STT Tên danh nghĩa Ký hiệu Giá trị Đơn vị đo 1 T{i trọng xe G 25000 N 2 Trọng lượng b{n thân xe G0 35100 N 3 Trọng lượng toàn bộ xe GT 61750 N 4
T{i trọng phân cho czu trước G1 13500 N 5 T{i trọng phân cho czu sau G2 46600 N 6 Ký hiệu lốp Bxd 7x16 inch 7 Chiều dài cơ sw L 3375 mm 8
Kho{ng cách 2 trục đứng czu dẫn B0 1450 mm hướng 9 Chiều rộng vvt trước Bt 1665 mm 10 Chiều rộng vvt sau Bs 1495 mm 11 Chiều cao của xe h 3020 mm 12 Chiều dài toàn bộ ∑L 6190 mm 13 Chiều dài trục lái ln 725 mm 14 Bán kính vành tay lái Rl 200 mm 15 Đường kính trục lái 25 mm 16 Chiều rộng toàn bộ ∑B 2280 mm 17 Bán kính quay vòng min 6830 mm 18 Vận tốc max Vmax 83 Km/h 19 Góc nghiêng trụ đứng 6 độ 20 Góc thoát sau xe 27 độ 21 Góc thoát trước xe 28 độ 22
Tỷ số truyền cơ cấu lái iw 20,5
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 28
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI I.
TÍNH TON ĐỘNG HỌC CỦA HỆ THNG LI
1. Tính toán động học hình thang lái
Nhiệm vụ của tính toán động học dẫn động lái là xác định nh~ng thông số tối
ưu của hình thang lái đ} đ{m b{o động học quay vòng của các bánh xe dẫn
hướng một cách chính xác nhất và động học đúng của đòn quay đứng khi có sự
bivn dạng của bộ phận đàn hƒi hệ thống treo và chọn các thông số czn thivt của
hệ thống truyền dẫn động lái.
Từ lý thuyvt quay vòng ta thấy đ} nhận được sự lăn tinh của các bánh xe dẫn
hướng khi quay vòng thì hệ thống lái ph{i đ{m b{o mối quan hệ sau đây của góc
quay bánh xe dẫn hướng bên ngoài và bên trong so với tâm quay vòng. Theo giáo
trình thivt kv và tính toán ô tô máy kéo mối quan hệ đó được th} hiện w công thức sau: Cotgβ – Cotgα = (1) Trong đó:
β: là góc quay của bánh xe dẫn hướng bên ngoài;
α: là góc quay của bánh xe dẫn hướng bên trong;
B0: là kho{ng cách gi~a hai đường tâm trụ đứng;
L: là chiều dài cơ sw của ô tô.
Từ bi}u thức trên đ} bánh xe dẫn hướng lăn tinh mà không bị trượt lvt trong quá
trình quay vòng thì hiệu số Cotg góc quay của bánh xe bên ngoài và bên trong
ph{i luôn là một hằng số và bằng .
Hình thang lái ph{i đ{m b{o động học quay vòng của bánh xe dẫn hướng. Nó
bao gƒm các khâu được nối với nhau bwi các khớp czu và các đòn bên được bố
trí nghiêng một góc so với tâm dzm czu trước.
a) Trường hợp xe đi thẳng
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 29
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Hình 24: Sơ đồ động học hình thang lái khi xe đi thẳng
Các đòn bên tạo với phương dọc một góc .
Khi ô tô quay vòng với các bán kính quay vòng khác nhau mà quan hệ gi~a α và
β vẫn được gi~ nguyên như công thức trên thì hình thang lái Đantô không th}
th†a m„n hoàn toàn được.
Tuy nhiên ta có th} chọn một kvt cấu hình thang lái cho sai lệch với quan hệ lý
thuyvt trong giới hạn cho phép lớn nhất w nh~ng góc quay lớn, nhưng cũng
không được vượt quá 1,50.
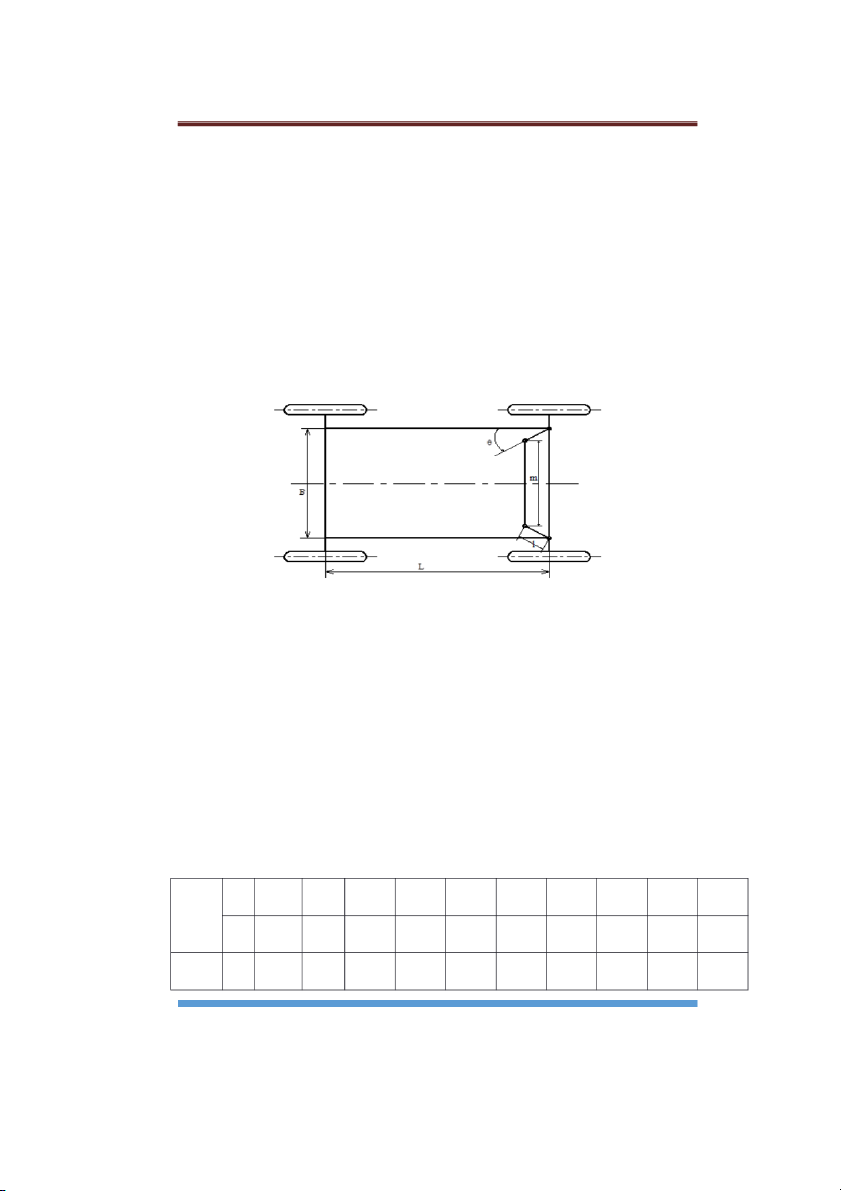
b) Trường hợp khi xe quay vòng
Với kích thước cơ b{n của xe ta có chiều dài đòn ngang hình thang lái m = 1290
(mm) từ đó ta chọn được chiều dài đòn bên hình thang lái l = 190 (mm) với (l = (0.14 ÷ 0.16)m).
Trong trường hợp khi xe vào đường vòng đ} đ{m b{o cho các bánh xe dẫn
hướng không bị trượt lvt hoặc trượt quay thì đường vuông góc với các vec tơ vận
tốc chuy}n động của tất c{ các bánh xe ph{i gặp nhau tại một đi}m, đi}m đó là
tâm quay vòng tức thời của xe (đi}m 0 trên hình 25).
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 30
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
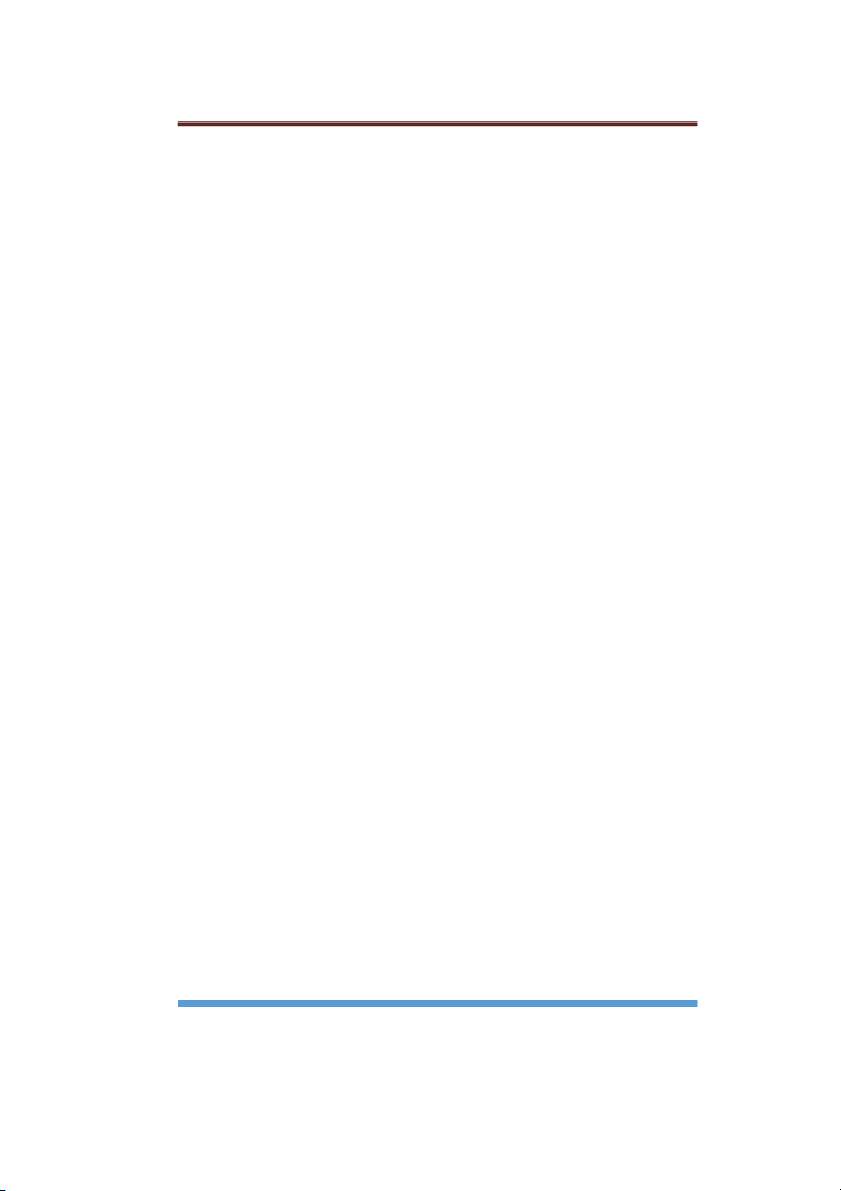
Hình 25: Sơ đồ động học quay vòng của ô tô có hai bánh dẫn hướng phía trước
Theo giáo trình thivt kv tính toán ô tô ta có quan hệ gi~a β và α như sau: (2)
Theo quan hệ này khi bivt trước một góc nào đó thì ứng với mỗi giá trị của góc
α ta sy có một giá trị của β. Nghĩa là hàm số β = f(,α) sy bi}u thị được đường
cong đặc tính thực tv của hình thang lái. Vấn đề đặt ra là ph{i chọn các thông số
của hình thang lái sao cho hợp lý đ} sự sai khác gi~a đường cong đặc tính của
hình thang lái so với đường đặc tính lý thuyvt là nh† nhất.
Trên thực tv có nhiều phương pháp đ} ki}m tra động học của hình thang lái
xong đ} đơn gi{n ta dŠng phương pháp đƒ thị đ} ki}m tra sự sai khác của đường
đặc tính hình thang lái thực tv so với lý thuyvt theo quan hệ β= f(,α).
2. Xây dựng đường cong đặc tính hình thang lái lý thuyết
Trên hệ trục tọa độ đề các α0β ta xác định được đường cong đặc tính lý thuyvt qua quan hệ β = f(,α). Theo công thức (1) ta có: B0 Cotg Cotg L Trong đó:
L: chiều dài cơ sw của xe L = 3375 (mm);
B0: kho{ng cách gi~a hai trục đứng của czu dẫn hướng B0 = 1450 (mm). Hay:
Cotgβ = Cotgα + = Cotgα + (3)
Ứng với các giá trị của góc α từ 0 , 5 0
0, …, 45 ta lzn lượt có cá 0 c giá trị tương
ứng của góc β. Các giá trị này được lập trong b{ng 1.
Bảng 1: Quan hệ giữa β v α theo lý thuyết α β 10 0.9920 30 2.930 50 4.820 70 6.650 100 9.310 150 13.50 200 17.50 250 21.230 300 24.840 350 28.30 400 31.670 450 34.90
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 31
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
3. Xây dựng đường cong đặc tính hình thang lái thực tế
Với kích thước cơ b{n của xe ta có chiều dài đòn ngang hình thang lái m = 1290
(mm) từ đó ta chọn được chiều dài đòn bên hình thang lái l = 190 (mm) với (l = (0.14 ÷ 0.16)m).
Đ} xây dựng đường cong đặc tính hình thang lái thực tv ta ph{i xây dựng được
đường cong bi}u thị hàm số β = f(, α). Theo mối quan hệ này thì nvu bivt trước
một góc nào đó ứng với một giá trị của góc α thì ta có một giá trị của góc β. Mối
quan hệ gi~a góc , α và β theo giáo trình thivt kv tính toán ô tô được th} hiện như sau: Trong đó:
β: góc quay của trục dẫn hướng bên ngoài;
α: góc quay của trục bánh xe dẫn hướng bên trong;
: góc tạo bwi đòn bên hình thang lái và phương dọc;
l: chiều dài đòn bên hình thang lái l = 190 (mm);
m: chiều dài đòn ngang hình thang lái m = 1290 (mm).
Dựa vào công thức (2) ta xây dựng các đường đặc tính hình thang lái thực tv
ứng với mỗi giá trị của góc α = (00, 5 , …, 0
450) ta lấy góc theo xe thivt kv = 160.
Đƒng thời ta lấy thêm một vài giá trị lân cận với góc đ} so sánh. Các giá trị
tương ứng được th} hiện trong b{ng 2.
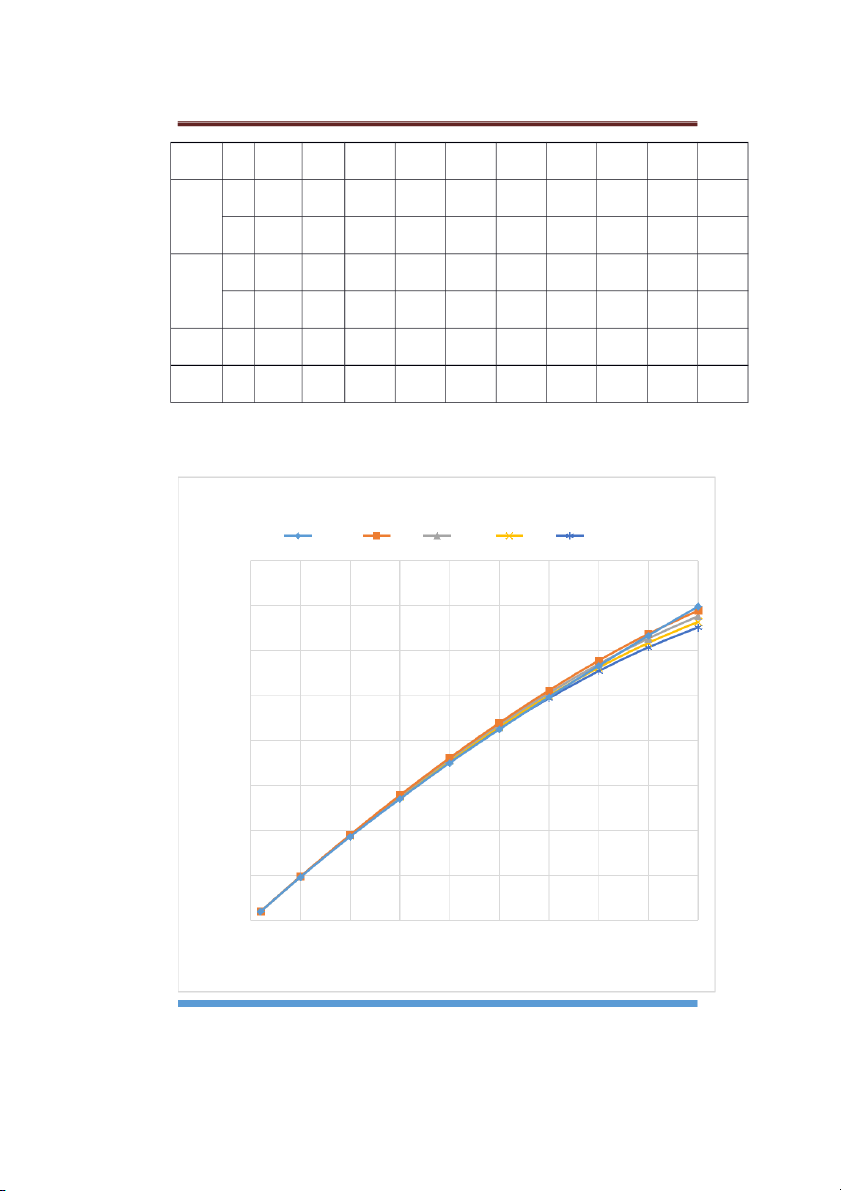
Bảng 2: Bảng giá trị quan hệ giữa β v α ph thuộc vo góc =180 0.00 0.02 0.09 0.17 0.15 0.1 0.14 0.6 0.33 1.33 1 0.99 4.84 9.4 13.67 17.65 21.33 24.7 27.7 30.34 33.57 3 =170 0.00 0.03 0.13 0.25 0.3 0.31 0.16 0.2 0.83 1.29 2
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 32
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI 0.99 4.85 9.44 13.75 17.8 21.54 25 28.1 30.84 33.2 4 =160 0.00 0.04 0.16 0.33 0.42 0.52 0.54 0.2 0.33 1.1 2 0.99 4.86 9.47 13.83 17.92 21.75 25.3 28.5 31.34 33.8 4 =150 0.00 0.05 0.2 0.4 0.55 0.72 0.73 0.57 0.17 0.47 3 0.99 4.87 9.51 13.9
18.05 21.95 25.57 28.87 31.84 34.43 5 0.99 4.82 9.31 13.5 17.5 21.23 24.84 28.3 31.67 34.9 2 α=10
α=5 α=10 α=15 α=20 α=25 α=30 α=35 α=40 α=45 0 0 0 0 0 0 0 0 0
Dựa vào các số liệu trên ta vy được đƒ thị đặc tính động học hình thang lái lý
thuyvt và thực tv trên cŠng một hệ trục tọa độ.
Đ TH Ị ĐẶ C TÍNH Đ ỘN G H ỌC H ÌNH TH A N G L I Lý thuyếết θ=15 Th c tếế ự θ=17 θ=18 40 35 30 25 20 β 15 10 5 0 0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0 4 5 α
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 33
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Nhận thấy rằng độ sai lệch gi~a góc quay vòng thực tv và góc quay vòng lý
thuyvt đều nh† hơn 1,5 0trong phạm vi có th} quay vòng của bánh xe dẫn hướng
do đó các thông số của hình thang lái xe thivt kv là th†a m„n.
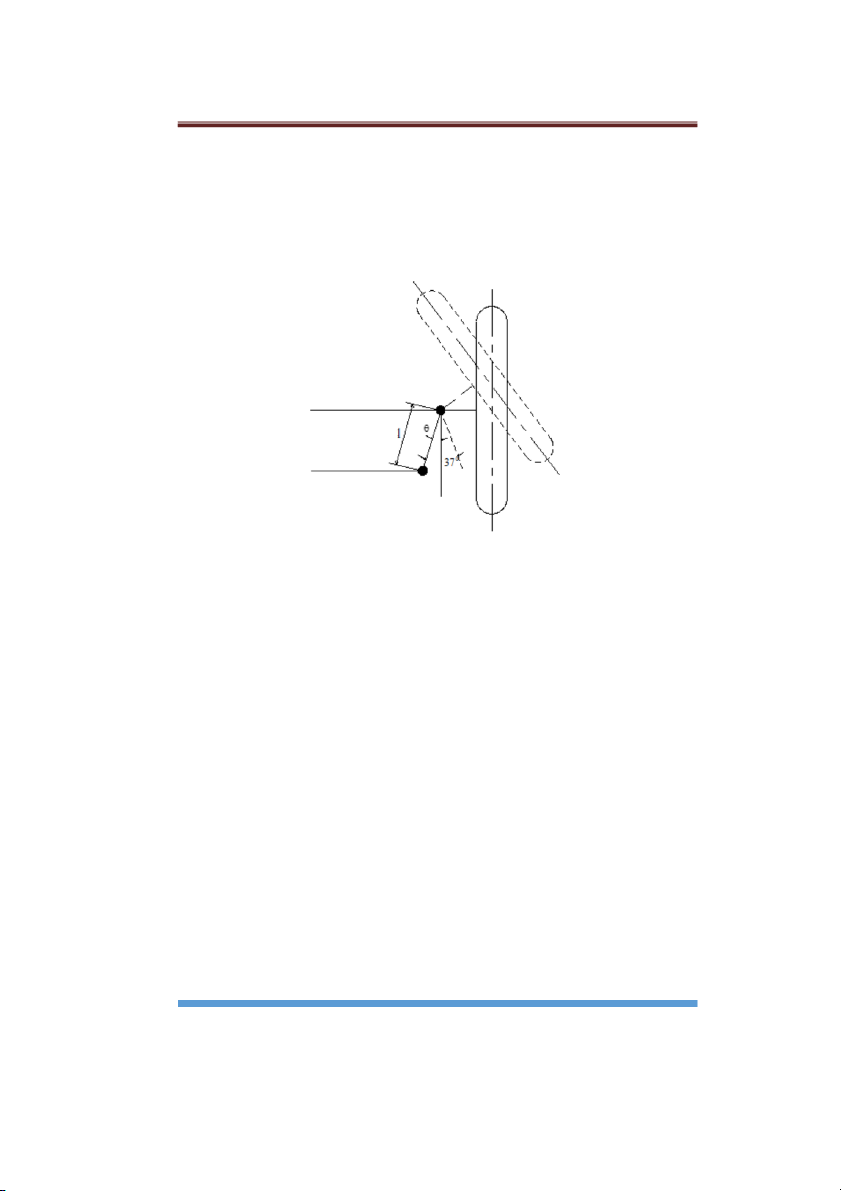
Với xe thivt kv là xe t{i cho nên tỷ số truyền góc nằm trong kho{ng 16 ÷ 32. Vì ta chọn i dđ = 1 cho nên i
g = 20,5 tức là khi góc quay lớn nhất của bánh xe dẫn
hướng là 37 thì góc quay của vành tay lái 0 là 7600.
Thời gian quay vòng tay lái là thời gian mà người lái ph{i quay vành tay lái từ
vị trí tận cŠng bên trái sang vị trí tận cŠng bên ph{i tức là ph{i quay vành tay lái
đi một góc 760 x 2 = 15200.
Nvu người lái đánh lái với vận tốc 1,5 (v/s) thì thời gian quay vòng là: t = = 2,81 (s) (5)
4. Xác định mô men cản quay vòng ti chỗ
Sơ đƒ lực tác dụng lên hệ thống lái:
Hình 26: Sơ đồ lực tác dng lên hệ thống lái
Lực tác động lên vành tay lái của ô tô sy đạt giá trị cực đại khi ta quay vòng ô tô
tại chỗ. Lúc đó mô men c{n quay vòng trên bánh xe dẫn hướng Mc sy bằng t‚ng
số của mô men c{n chuy}n động M ,
1 mô men c{n M2 do sự trượt lê bánh xe trên
mặt đường và mô men c{n M3 gây nên bwi các góc đặt của bánh xe và trụ đứng
nhằm làm ‚n định các bánh xe dẫn hướng.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 34
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI Mc = 2( M1 + M + M 2 3)
Với η là hiệu suất tính đvn t‚n hao ma sát tại cam quay và các khớp trong dẫn
động lái η = 0,5 ÷ 0,7 chọn η = 0,7. a) Mô men cản M1
Mô men c{n lăn được xác định theo công thức: M1 = G . f . a (6) bx Trong đó:
Gbx: Trọng lượng tác dụng lên một bánh xe dẫn hướng.
Hình 27: Sơ đồ đặt bánh xe dẫn hướng G bx = = = 6750 (N) a: cánh tay đòn; Ta có:
B + 2(r.tgβ + a) = Bt nên ta có: a = Trong đó:
Bt: chiều rộng vvt trước Bt = 1665 (mm);
B: kho{ng cách gi~a hai trụ đứng czu dẫn hướng B = 1450 (mm);
r: bán kính tự do của bánh xe. r = (B + ) . 25,4 (mm) (7)
B: chiều rộng lốp B = 7 (inch);
d: đường kính vành bánh xe d = 16 (inch).
Nên ta có: r = (7 + ) . 25,4 = 381 (mm)
β: góc nghiêng ngang trụ quay đứng β = 60.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 35
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI Khi đó: a = = 67,4 (mm)
f: hệ số c{n lăn ta xét trong trường hợp khi ô tô chạy trên đường xấu như đường đất, đá s†i (f = 0,04). Vậy nên:
M1 = 6750.0,04.0,0674 = 18,2 (Nm)
b) Mô men cản M2 do sự trượt lê của bánh xe trên mặt đường
Khi có lực ngang Y tác dụng lên bánh xe thì bề mặt tivp xúc gi~a lốp và đường
sy bị lệch đi đối với trục bánh xe. Nguyên nhân lệch này là do sự đàn hƒi bên của
lốp. Đi}m đặt của lực Y sy nằm cách hình chivu của trục bánh xe một đoạn x về
phía sau, đoạn x được thừa nhận bằng n€a kho{ng cách của tâm diện tích tivp
xúc đvn rìa ngoài của nó theo công thức sau: x = 0,5 . (8) Trong đó:
r: bán kính tự do của bánh xe r = 381(mm);
rbx bán kính làm việc của bánh xe; Ta thừa nhận:
rbx = 0,96.r = 0,96.381 = 365,8 (mm) Nên: x = 0,5. = 53,27 (mm)
Hình 28: Sơ đồ lực ngang tác dng lên bánh xe khi xe quay vòng
Mô men c{n do bánh xe trượt lê là: M2 = G . . x (Nm) (9) bx
Với là hệ số bám ngang. Lấy = 0,85. Vậy ta có:
M2 = 6750.0,85.0,05327 =305,6 (Nmm)
Đ} làm ‚n định các bánh xe dẫn hướng người ta làm các góc đặt bánh xe:
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 36
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
β: góc nghiêng của trụ quay đứng trong mặt ph|ng ngang của xe;
: góc nghiêng của trụ quay đứng trong mặt ph|ng dọc của xe;
: góc lệch của vvt tivp xúc của lốp với mặt đường so với mặt ph|ng gi~a của bánh xe;
α: góc do„ng của bánh xe dẫn hướng;
: góc chụm của bánh xe dẫn hướng.
Tất c{ các góc này đ} làm ‚n định cho hệ thống lái nhưng chúng làm xuất hiện
mô men c{n M3, việc tính toán mô men này tương đối phức tạp. Trong tính toán
giá trị mô men c{n M3 được k} đvn bwi hệ số χ.
χ: hệ số tính đvn {nh hưwng của M3 do czu trước của ô tô bị nâng lên.
χ = 1,07 ÷ 1,15. Ta chọn χ = 1,1. Như vậy: Mc = (Nmm) (10) Do đó: Mc = = 1020 (Nm)
5. Xác định lực cực đi tác dng lên vnh tay lái
Khi đánh lái trong trường hợp ô tô đứng yên tại chỗ thì lực đặt lên vành tay lái
đ} th…ng được lực c{n quay vòng tác dụng lên bánh xe dẫn hướng là lớn nhất.
Lực lớn nhất đặt lên vành tay lái được xác định theo công thức: P Lmax = Mc (11) Trong đó:
Mc: Mô men c{n quay vòng Mc = 1020 (Nm);
Rl: bán kính bánh lái Rl = 0,2 (m);
ic: tỷ số truyền của cơ cấu lái ic = 20,5;
ηth: hiệu suất thuận của cơ cấu lái, đối với cơ cấu lái trục vít – ê cubi hiệu suất thuận ηth = 0,7;
id: tỷ số truyền của dẫn động lái.
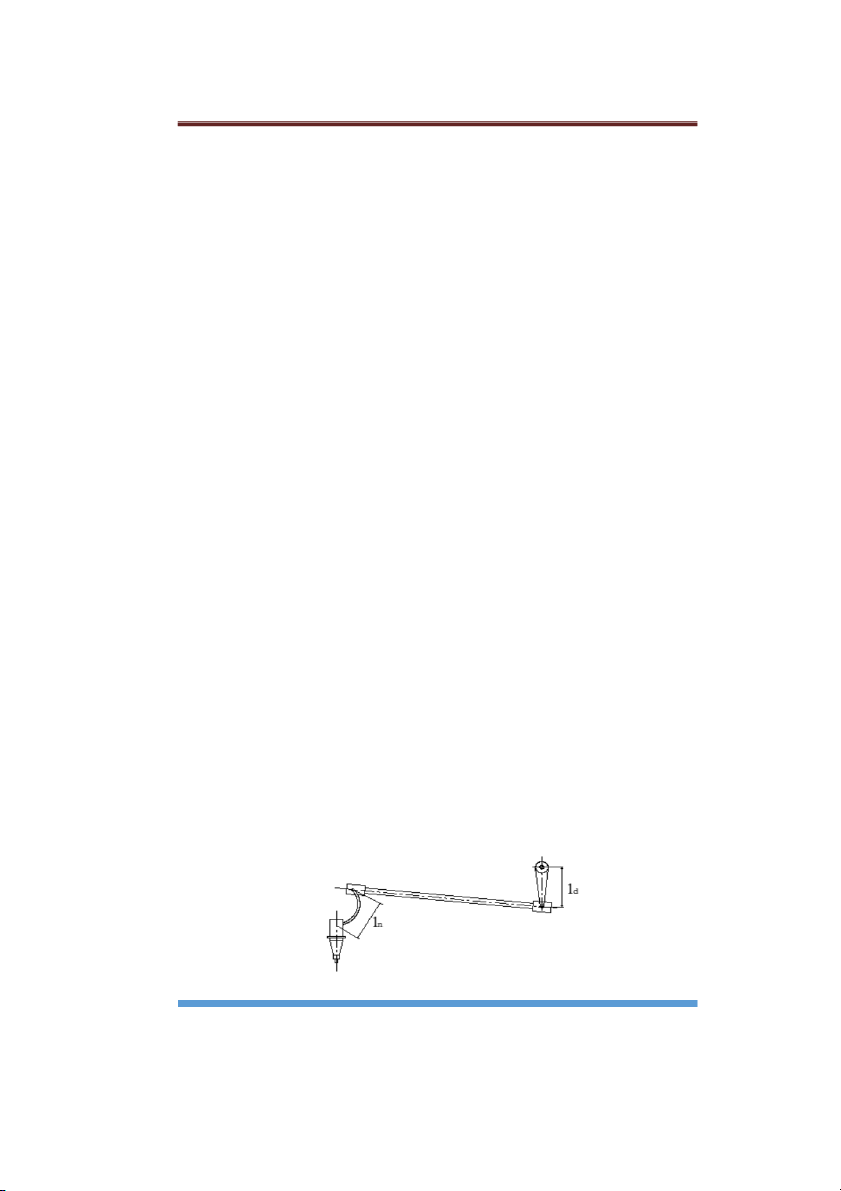
Coi tỷ số truyền của dẫn động lái bằng tỷ số gi~a chiều dài các đòn nối với thanh kéo dọc: i d = = = 1 (12)
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 37
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Hình 29: Sơ đồ xác định tỷ số truyền dẫn động lái Từ trên ta có: PLmax = 1020. = 355 (N)
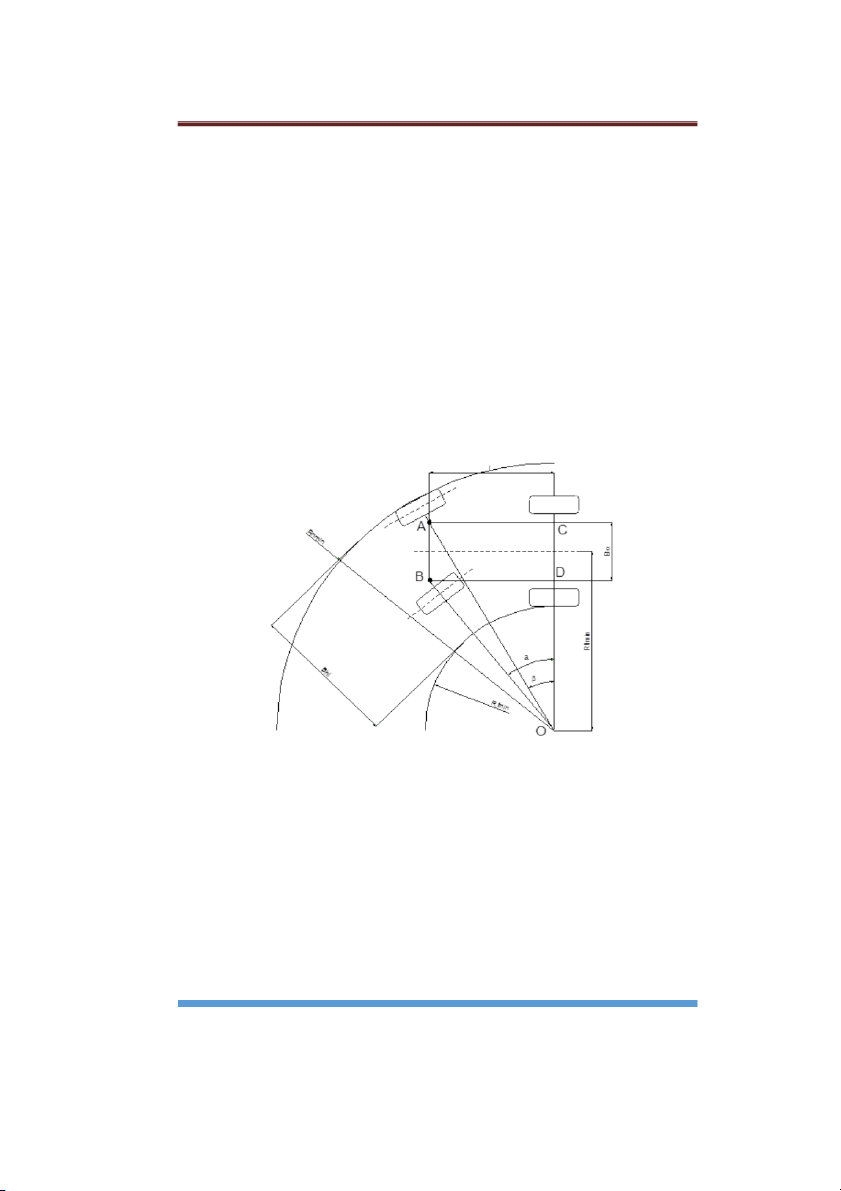
6. Xác định góc quay vnh lái v bán kính quay vòng ô tô
a) Góc quay vành lái lớn nhất
Góc quay vành lái lớn nhất được xác định theo góc quay bánh xe dẫn hướng
yêu czu nhằm tạo nên kh{ năng quay vòng với bán kính quay vòng nh† nhất.
Thông thường góc quay của bánh xe dẫn hướng kẻ từ vị trí trung gian đvn vị trí
quay lớn nhất, lấy trung bình cho c{ hai bên βbxmax có th} lấy với xe t{i cỡ nh†: β 0 bxmax =37 .
Góc quay vành lái lớn nhất khi tính từ vị trí trung gian: β 0
vlmax = βbxmax . il = 37.20,5 = 758,5 do đó bằng 2,1 (vòng)
b) Bán kính quay vòng nhỏ nhất gồm:
Hình 30: Bán kính quay vòng ô tô
Bán kính lý thuyvt Rlt nh† nhất tính tới trọng tâm ô tô: R = ltmin = 4478,7 (mm) (13)
Bán kính nh† nhất Rtmin của hành lang quét phía trong: R – = tmin = 90 5482 (mm) (14)
Bán kính nh† nhất Rnmin của hành lang quét phía ngoài: R = – = nmin = 90 8285 (mm) (15)
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 38
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Chiều rộng hành lang quét: Bhl = Rnmin – Rtmin = 8285 – 5482 =2803 (mm) (16) II.
TÍNH TON THIT K CƠ CẤU LI TRgC VÍT – Ê
CUBI – THANH RĂNG – CUNG RĂNG
1. Thông số hình học
Vi phân góc quay của vành tay lái: d = dt (17) p: bước ren trục vít; : góc quay vành tay lái; t: thời gian.
Vi phân góc quay của trục đòn quay đứng: dΩ = (18)
Rc2: bán kính vòng chia của bánh răng rẻ quạt Do đó : i w = thay vào ta được: Rc2 =
2. Thiết kế bộ truyền trc vít – ê cubi
Tỷ số truyền của hệ thống lái: i = (19) Trong đó:
Mc: Mô men c{n khi quay vòng tại chỗ, Mc = 1020 (Nm);
PLmax: Lực lái lớn nhất của người lái PLmax = 355 (N);
Rl: bán kính vành lái Rl = 200 (mm);
ηth: hiệu suất truyền lực thuận của hệ thống lái ηth = 0,7. Vậy nên ta có: i = = 20,5
Tỷ số truyền của cơ cấu lái: i w = (20) Trong đó:
id : tỷ số truyền của dẫn động lái (tính w trên); Nên ta có: iw = = 20,5
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 39
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
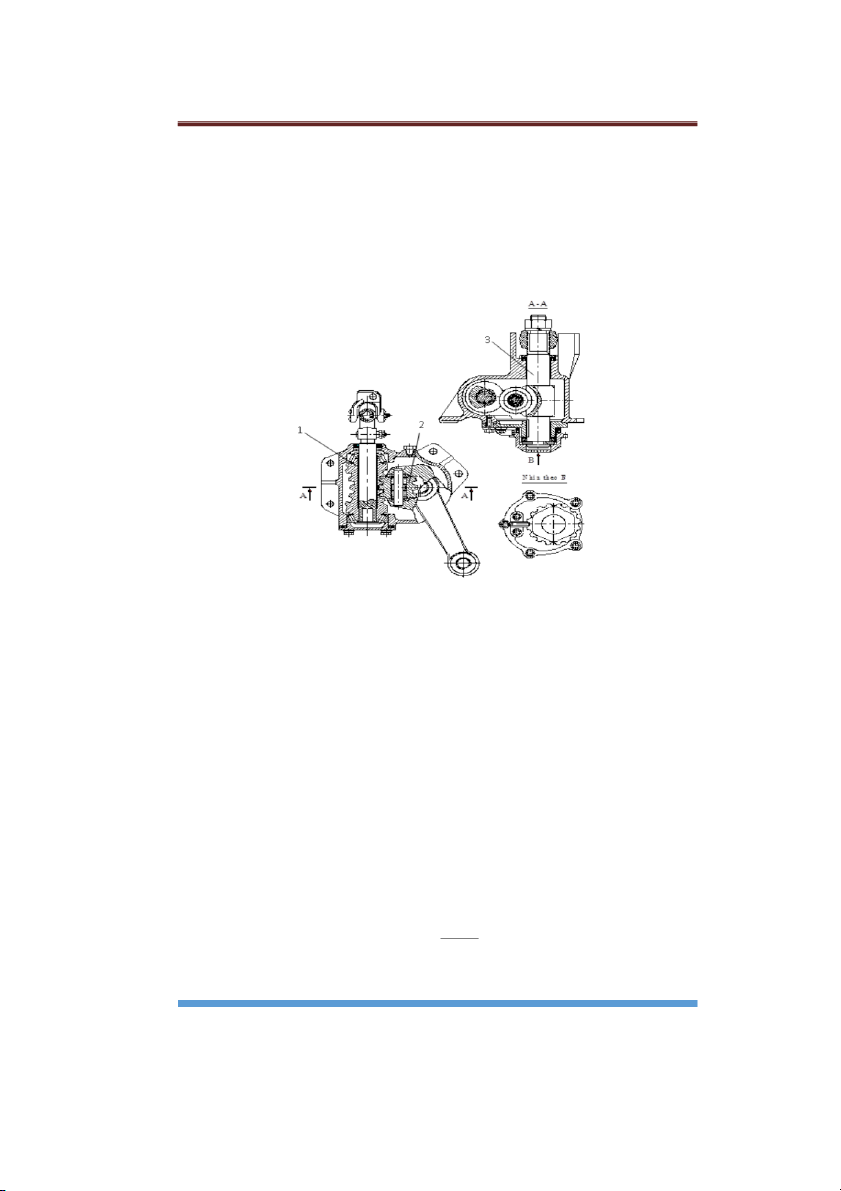
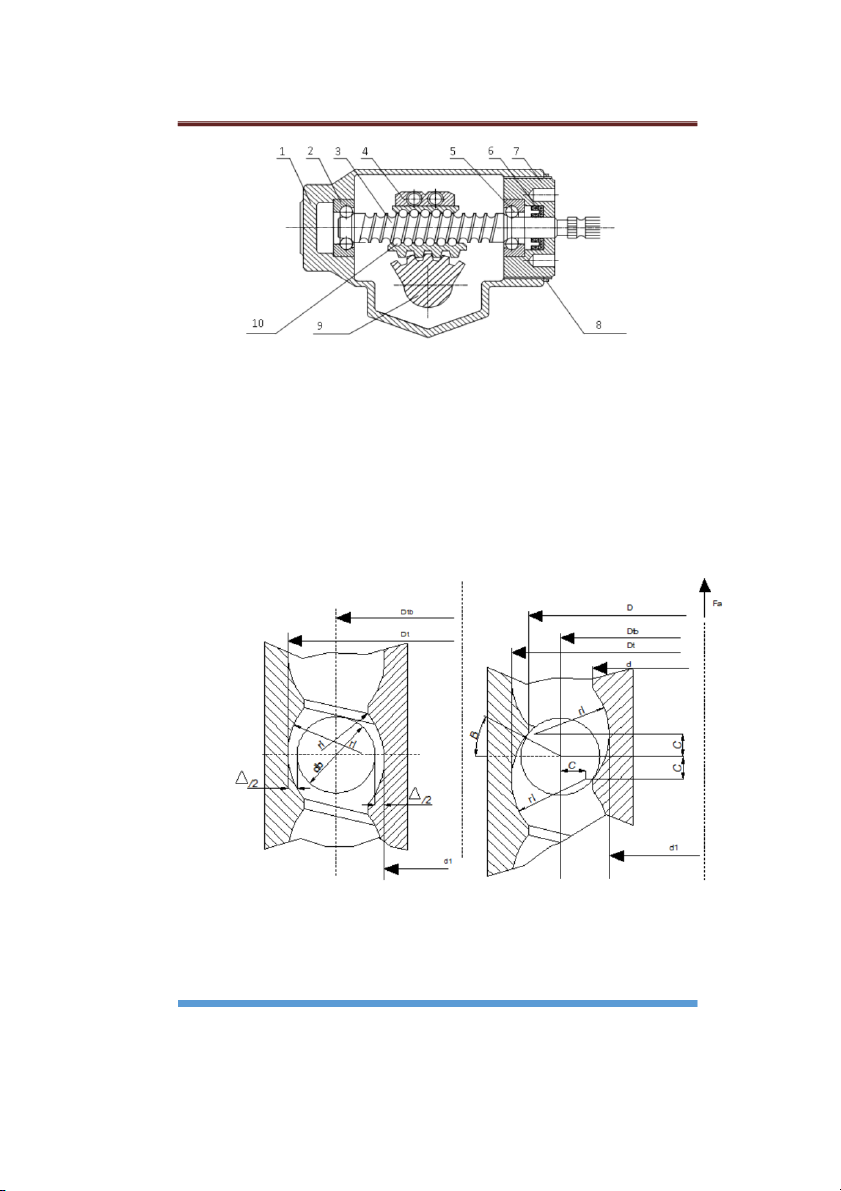
Hình 31: Cơ cấu lái trc vít – ê cubi – thanh răng – cung răng
1.V† cơ cấu lái 6.Phớt
2.Ổ bi dưới 7.Đai ốc điều ch•nh
3.Trục vít 8.Đai ốc h„m
4.Ê cubi 9. Bánh răng rẻ quạt 5.Ổ bi trên 10.Bi
Khi đánh lái, trục vít bị xoay, tạo ra lực vuông góc từ bề mặt r„nh vít qua các
viên bi tác dụng vào bề mặt r„nh bi trên ê cu. Lực này được phân ra thành 2
thành phzn: là lực vòng P yvà lực dọc trục Pd. Lực Pd chính là lực tác dụng làm quay bánh răng rẻ quạt.
Hình 32: Các thông số của trc vít – ê cubi – thanh răng – cung răng
Lực Pd có giá trị như sau: Pd = (21)
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 40
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Mc: Mô men c{n quay vòng khi xe đứng tại chỗ Mc = 1020 (Nm);
ld: độ dài đòn quay đứng ld = 200 (mm);
ln: độ dài đòn quay ngang, đoạn nối gi~a trục bánh xe với đòn kéo dọc ln = 200 (mm);
ηth: hiệu suất thuận của cơ cấu lái ηth = 0,7;
Rc2: bán kính vòng chia của bánh răng rẻ quạt.
Ta chọn đường kính bi: db = 6 (mm)
Do đó bước vít của trục vít: p = db + 5 =11 (mm) Ta có: R c2 = = = 36 (mm) Vậy: P d = = 19833 (N)
Chọn vật liệu chv tạo trục vít là thép 20X. Do đặc đi}m cấu tạo, ê cubi và thanh
răng là một chi tivt và cŠng được làm từ thép 20XH.
Xác định đường kính trong của trục vít theo độ bền kéo: (22) Trong đó:
[] = với : giới hạn ch{y của vật liệu vít. Với thép 20X, = 400 (MPa), [] = 400/3
=133 (MPa) và bằng 133(MN/m2). Vậy nên: d1 ≥ = 16 (mm)
Theo b{ng P2.4 ( Tính toán thivt kv hệ dẫn động cơ khí tập 1) chọn d 1= 22 (mm).
Chọn đường kính bi: db = 6 (mm).
Bước vít: p = db + 5 = 11 (mm).
Bán kính r„nh lăn: chọn r1 = 0,51.db = 0,51.6 = 3,06 (mm).
Kho{ng cách từ tâm r„nh lăn đvn tâm bi: (23)
Trong đó β: góc tivp xúc, nên chọn β = 450 thì kh{ năng t{i của trục vít tăng. Ta có:
Đường kính vòng tròn qua tâm viên bi: Dtb = d + 2(r 1
– c) = 22+2.(3,06 - 0,04) =28,04(mm) 1
Đường kính trong của đai ốc:
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 41
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
D1= Dtb + 2(r1 – c) =28,04 + 2.(3,06 - 0,04)=34,08(mm)
Chiều sâu của profin ren:
h1 = ( 0,3 0,35)d = 0,35.6 = 2,1 (mm) b
Đường kính ngoài của trục vít:
d= d1 + 2h1 = 22 +2.2,1 = 26,2 (mm)
Đường kính ngoài của ê cu:
D =D1 – 2 h1 =34,08 – 2.2,1 = 29,88 (mm)
Góc nâng của trục vít được xác định như sau: (24)
: góc ma sát lăn thay thv : (25)
Với = 0,004 ÷ 0,006 là hệ số ma sát lăn. Nên ta có: Bước vít: t = Dtb. tg =
Số vòng ren trên ê cu: K = 2,5 (vòng).
Số viên bi trên các vòng ren làm việc: Zb = Dtb.K/db -1= (viªn)
Số viên bi không làm việc phụ thuộc vào chiều dài r„nh hƒi bi: Zk = L /d k b = 30/6 = 5 (viên) Trong đó:
LK: chiều dài r„nh hƒi bi LK = 30 (mm) T‚ng số viên bi: Z = Z + Z b k = 36+ 5 = 41 (viên)
Xác định khe hw hướng tâm:
= D1 – (2db +d ) = 34,08 – (2.6+22) = 0,08 (mm) 1 Khe hw tương đối: = /d1= 0,08/22 = 0,004 (mm) Hiệu suất thuận: 0,99 Hiệu suất nghịch: Tính kiểm bền
T{i trọng riêng dọc trục được xác định theo công thức sau:
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 42
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI (26)
Trong đó: = 0,8 hệ số phân bố không đều t{i trọng cho các viên bi. q a = = 19 (MPa)
Từ khe hw tương đối χ và t{i trọng riêng dọc trục qa, theo đƒ thị xác định ứng
suất lớn nhất , ta xác định được ứng suất lớn nhất = 3800 MPa.
= 5000 (MPa) đối với mặt làm việc của trục vít.
Do đó trị số th†a m„n điều kiện:
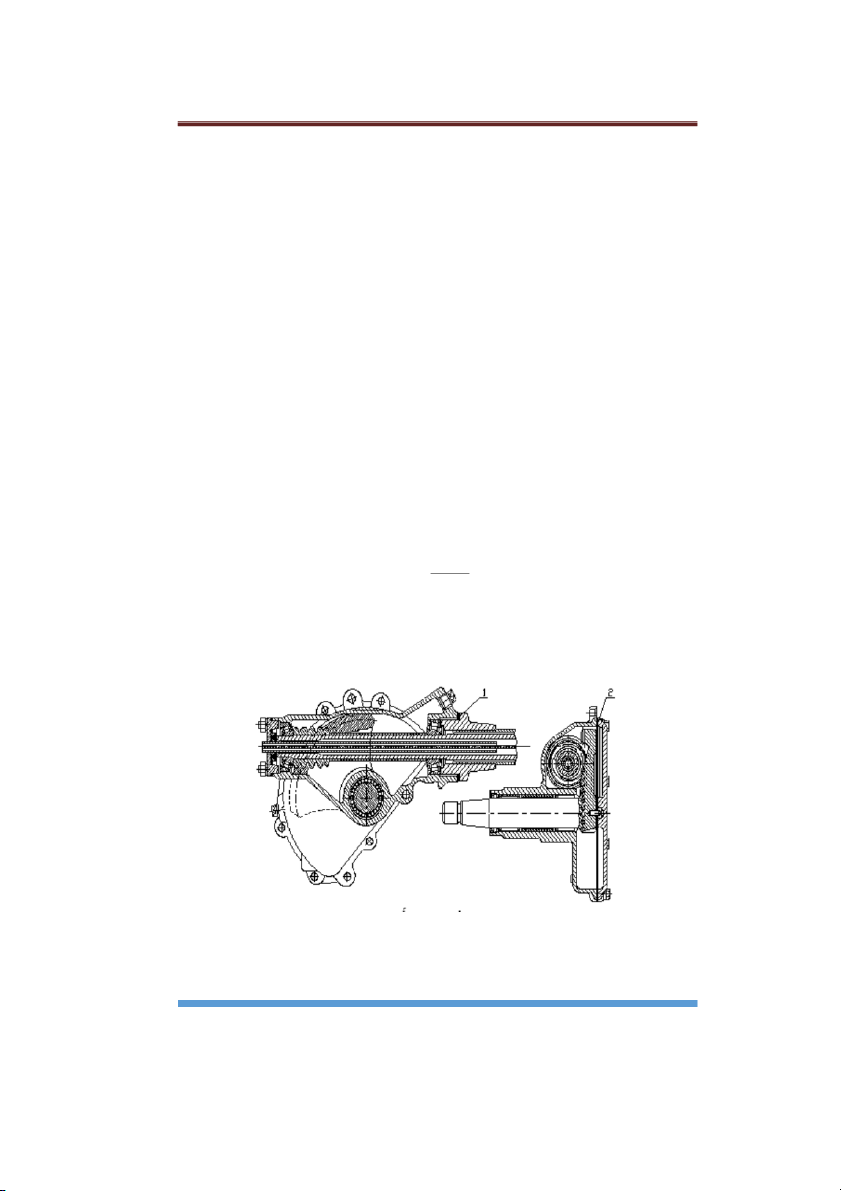
3. Thiết kế bộ truyền thanh răng - cung răng
Sơ đƒ bộ truyền thanh răng – cung răng:
Hình 33: Cơ cấu lái liên hợp
1.Thanh răng 2.Cung răng
3.1. Chọn vật liệu
Thanh răng và bánh răng rẻ quạt được chv tạo bằng thép 20XH, thường hóa, độ
r…n HRC 50, = 650 (MPa), = 400 (MPa), phôi rèn.
3.2. Xác định các thông số của bộ truyền
a) Tính bánh răng rẻ quạt theo độ bền tiếp xúc
Bánh răng rẻ quạt là bánh răng trụ răng th|ng. Tính toán nhằm th†a m„n điều
kiện tivp xúc lớn nhất sinh ra khi các đôi răng ăn khớp không vượt quá trị số cho phép .
Ứng suất tivp xúc lớn nhất được tính theo công thức Héc đối với hai hình trụ
tivp xúc dọc đường sinh. Ta có điều kiện bền: (27) Trong đó:
qn: cường độ t{i trọng pháp tuyvn (t{i trọng riêng);
: bán kính cong tương đương của bề mặt;
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 43
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
ZM: hệ số xét đvn cơ tính của vật liệu, do bánh răng rẻ quạt được chv tạo bằng vật liệu thép nên Z 1/2 M = 275 (MPa) .
Vì hiện tượng tróc rỗ x{y ra tại phzn chân răng gzn vŠng tâm ăn khớp, nên ta
tính toán độ bền tivp xúc của răng tại tâm ăn khớp.
Đối với bánh răng trụ răng th|ng, cường độ t{i trọng pháp tuyvn, có xét đvn sự
phân bố không đều t{i trọng theo chiều rộng vành răng và t{i trọng động là: (28)
Đ} đơn gi{n trong tính toán ta gi{ thivt có hai răng ăn khớp cŠng một lúc. Do đó
t‚ng chiều dài tivp xúc lH bằng chiều rộng vành răng bw.
Bán kính cong tương đương: (29)
Trong đó , : bán kính cong các bề mặt răng của thanh răng và bánh răng rẻ quạt. Ta có: = Do đó:
Từ nh~ng công thức trên ta suy ra công thức ki}m nghiệm bánh răng rẻ quạt theo độ bền tivp xúc: (30) Trong đó:
Md: mô men quay trục bánh răng rẻ quạt M = M d c = 1020 (Nm);
[: ứng suất tivp xúc cho phép (MPa);
ZH: hệ số xét đvn hình dạng bề mặt tivp xúc, tính theo công thức: (31)
Bánh răng rẻ quạt được thivt kv với độ dịch ch•nh bằng 0, ta có α 0 w = 20 và tính được: ZH =1,76
Hệ số tập trung t{i trọng tra theo đƒ thị trên hình 10-14 (trang 157 – CTM tập I) Đặt bw = ψ . d d w2 Lấy ZH =1,76, = 1,6
Với bánh răng bằng thép Z 1/3 M = 275 (MPa) . Với
Hệ số chiều rộng bánh răng ψa = phụ thuộc vào vị trí của bánh răng so với các
‚. Trong trường hợp thivt kv, bánh răng rẻ quạt đặt w vị trí đối xứng nên ta có th}
lấy ψa = 0,3 ÷ 0,5, ta chọn ψa = 0,4.
Bán kính vòng chia của bánh răng rẻ quạt đ„ tính w trên Rc2 = 36 (mm). Suy ra dw2 = 72 (mm).
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 44
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Do vậy chiều rộng bánh răng bw = 0,4.72 = 28,8 (mm).
Hệ số dŠng đ} tra các hệ số KHβ và KFβ (theo hình 10 -14 CTM tập I).
Độ r…n của vật liệu chv tạo HB 350, nên ta tìm được: KHβ = 1,01.
Chọn sơ bộ hệ số KHv = 1,2.
Thay nh~ng thông số vào công thức ta tính được ứng suất tác dụng lên bề mặt của bánh răng rẻ quạt. = 309 (MPa)1/2
Th†a m„n ứng suất cho phép Chọn mô đun: m = 6 (mm).
Đường kính vòng chia: Dc2 = 2Rc2 = 36.2 = 72 (mm).
Chiều cao răng: h2 = (1,6 ÷ 1,8)m = 1,6.6 = 9,6 (mm).
Chiều cao đ•nh răng: h = 0,6.m = 0,6.6 =3,6 (mm). đ2
Chiều cao chân răng: hf2 = h – h 2 = 9,6 - 3,6 = 6 (mm). đ2
Khe hw chân răng: c = (0,15 ÷ 0,25)m = 0,15.6 = 0,9 (mm).
Đường kính vòng đ•nh răng: D = D đ2
c2 + 2hđ2 = 72 + 2.3,6 = 79,2 (mm).
Đường kính vòng chân răng: Df = Dc2 – 2.(hf2 + c) = 72 – 2.(6 +0,9) = 58,2 (mm). Góc ăn khớp: α 0 w = 20 .
Chiều rộng bánh răng: bw = 28,8 (mm). Chọn bw = 40 (mm).
Bước răng: t = .m = .6 = 18,84 (mm)
Góc ôm của bánh răng rẻ quạt: b)
Tính bánh răng rẻ quạt theo độ bền uốn
Đ} đ{m b{o độ bền uốn cho răng, ứng suất uốn sinh ra tại chân răng không
được vượt quá một giá trị cho phép: (32)
Md : mô men quay trục bánh răng rẻ quạt bằng Mc = 1020 (Nm);
Rc : bán kính vòng chia bánh răng rẻ quạt Rc = 36 (mm) ;
bw : bề rộng bánh răng rẻ quạt bw = 40 (mm);
Yhệ số trŠng khớp của răng, Y;
Yβ = 1 hệ số k} đvn độ nghiêng của răng (bánh răng th|ng)
YF1 hệ số dạng răng tra b{ng 6.18 trang 109 Tính toán thivt kv hệ dẫn động cơ khí tập 1. Ta có : YF1 = 4
KF hệ số t{i trọng khi tính về uốn KF = 2 ÷ 2,5 chọn KF = 2,5. Vậy nên :
= 2361 (KNm) bằng 2,361 (MPa) [ = 400 (MPa).
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 45
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Th†a m„n điều kiện bền cho phép của loại vật liệu chv tạo.
III. TÍNH BỀN HỆ THNG LI
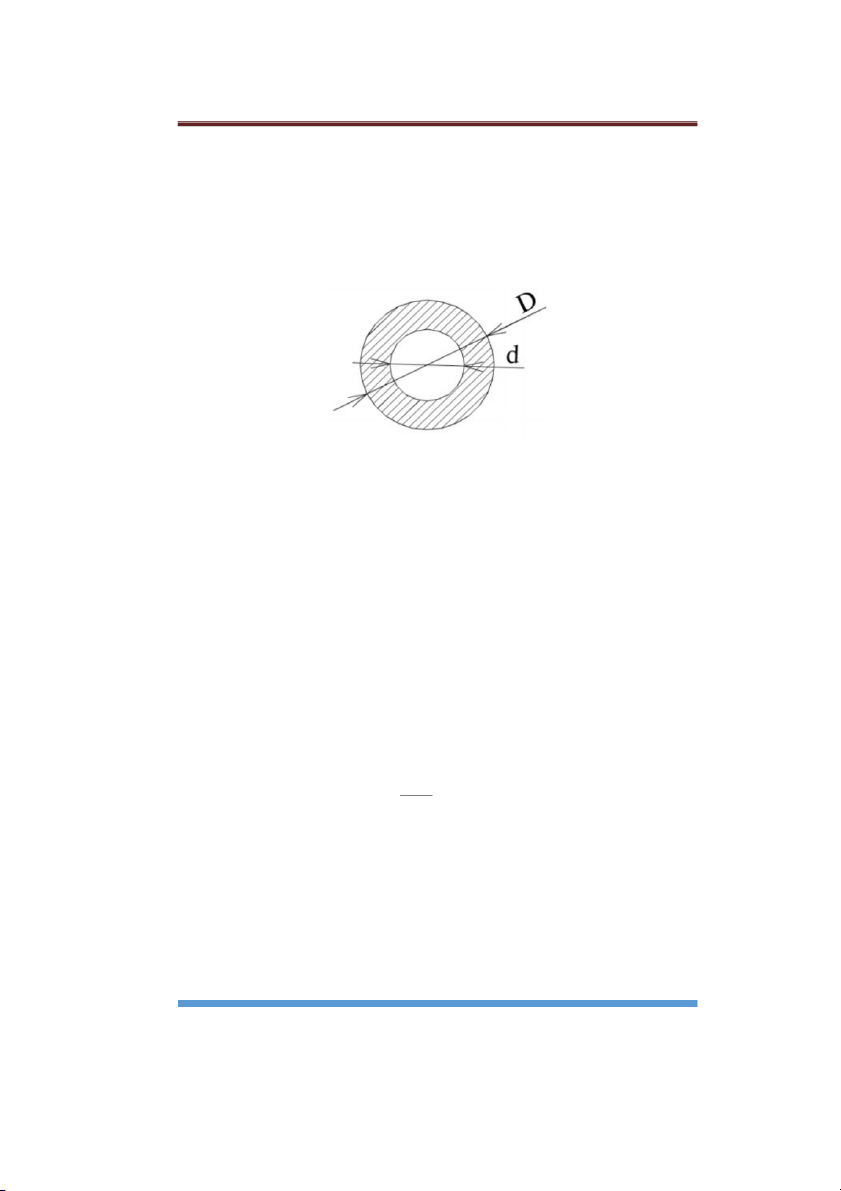
1. Tính bền trc lái
Trục lái làm bằng thép 30 có ứng suất cho phép [] = 80 (MN/m ). T 2 rục chv tạo
rỗng có đường kính D = 25 (mm), d= 17 (mm). Dưới tác dụng của mô men đặt
lên vành tay lái trục lái sy chịu tác dụng của ứng suất xo…n.
Hình 34: Mặt c\t trc lái
Ứng suất xo…n tác dụng lên trục lái: (33) Trong đó:
PLmax: lực cực đại tác dụng lên vành tay lái PLmax = 355 (N);
Rl: bán kính vành tay lái Rl = 200 (mm); Wx: mô đun chống xo…n. W 3 4 3 4 3
x = 0,2.D .(1 – α ) = 0,2.25 .(1 – 0,68 ) = 2457 (mm ). Ta có: α = = 0,68. Vậy: = 28,9 (MPa)
Độ dự tr~ tới hạn: n = = 2,42.
Ki}m tra góc xo…n đối với trục lái, góc xo…n trục lái được tính theo công thức: 2. .L D.G (34) Trong đó:
L: chiều dài trục lái L = 720 (mm);
D: đường kính trục lái D = 25 (mm);
G: mô đun đàn hƒi dịch chuy}n G = 8.10 (MPa); 4
: ứng suất xo…n tác dụng lên trục lái = 28,9 (MPa). Vậy nên:
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 46
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI = 0,02 (rad).
Góc xo…n tương đối không vượt quá (5,5 ÷ 7,5 0 0)/m. = = 1,6 0 /m.
[ = 5,50/m. Vậy trục lái đ{m b{o góc xo…n tương đối.
Như vậy trục lái đ{m b{o yêu czu kỹ thuật.
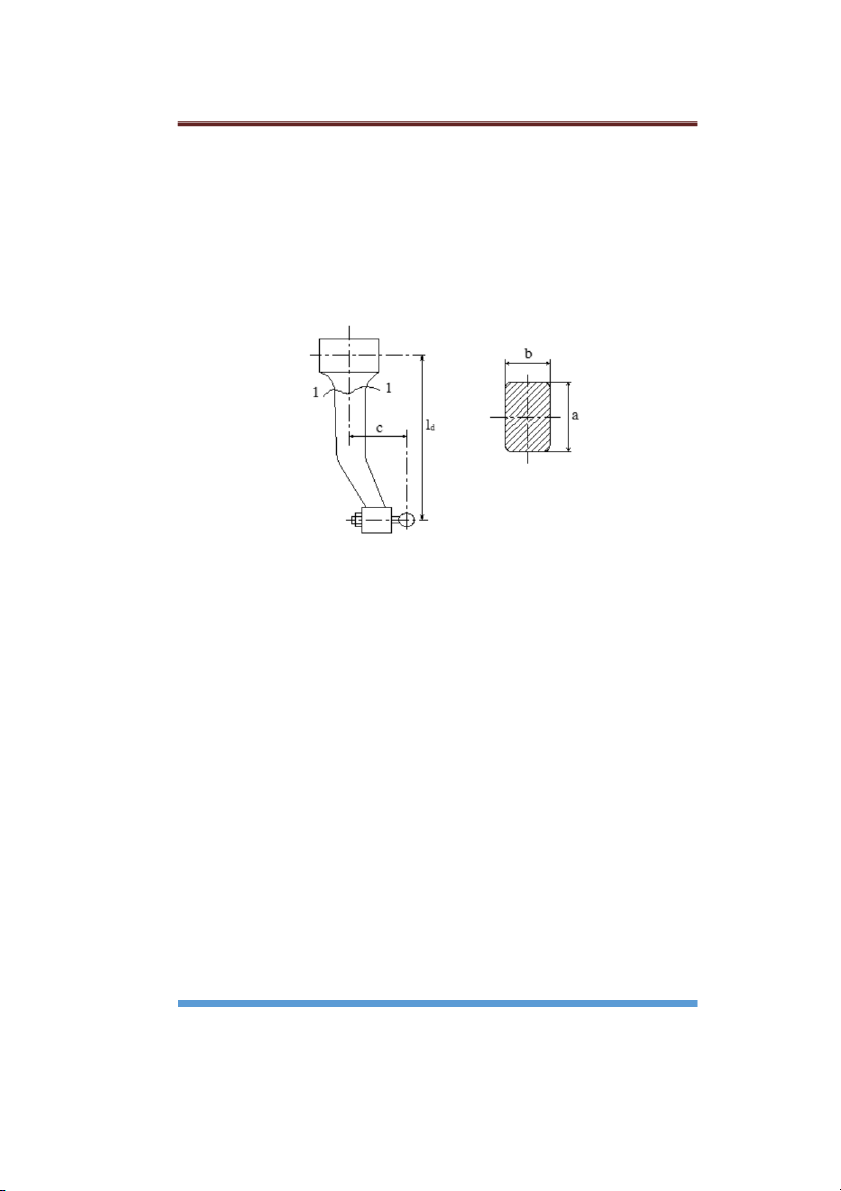
2. Tính bền đòn quay đứng Đ
Hình 35: Sơ đồ biểu diễn các kích thước của đòn quay đứng
Đòn quay đứng có kvt cấu dạng th|ng hoặc cong. Tỷ số gi~a chiều dài của đòn
quay đứng và đòn kéo ngang bằng một, nên có th} xem như toàn bộ mô men
được truyền qua đòn quay đứng. Nh~ng va đập tác động lên một trong hai bánh
xe dẫn hướng khi xe chạy trên đường gƒ ghề sy được truyền tới vành tay lái. Ở
trường hợp này trục đòn quay đứng chịu lực va đập toàn bộ. Đòn quay đứng nối
với dẫn động lái bằng một khớp czu ( Rô tuyn) và nối với cơ cấu lái bằng then hoa hình tam giác.
Vật liệu làm và chv tạo đòn quay đứng là thép 35X, có ứng suất uốn cho phép:
] = 700 (MPa), theo tài liệu chuyên ngành, ta lấy hệ số an toàn n = 2 do đó: ] = = 350 (MPa)
Ứng suất xo…n cho phép [ ] = 60 80 (MPa).
Kinh nghiệm cho thấy lực cực đại tác dụng lên đòn kéo dọc thường không vượt
quá trọng lượng tác dụng lên một bánh xe dẫn hướng. Vì vậy khi tính đòn quay
đứng nên chọn lực lớn hơn trong 2 lực tính theo các công thức dưới đây đ} tính toán :
Q1 = 0,5.G = 0,5.13500 = 6750 (N) (35) 1
Lực do mô men c{n quay vòng lớn nhất tạo ra là: Q2 = (36) Trong đó:
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 47
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
PLmax: lực lớn nhất tác dụng lên vành tay lái PLmax = 355 (N);
Rl: bán kính vành tay lái Rl = 200 (mm);
ic: tỷ số truyền cơ cấu lái ic = 20,5;
ηth: hiệu suất thuận của cơ cấu lái ηth = 0,7;
ld: chiều dài đòn quay đứng l = 200 (mm). d Từ trên ta có: Q2 = = 5090 (N)
Như vậy ta lấy lực Q đ} tính cho đòn quay đứng. Đòn quay đứng 1 được ki}m tra
theo uốn và xo…n tại tivt diện nguy hi}m 1-1. Ứng suất uốn: (37) Trong đó:
b: chiều dày đòn quay đứng b = 20 (mm);
a: chiều rộng đòn quay đứng a= 35 (mm). Vậy nên: = 297,5 (MPa) Ứng suất xo…n: (38) Trong đó:
c: kho{ng cách từ tâm tivt diện đvn tâm rô tuyn c = 100 (mm);
α: hệ số phụ thuộc vào tỷ số a/b.
= =1,75 do đó tra b{ng ta có α = 0,239. Vậy nên: = = 115,3 (MPa)
Đòn quay đứng được chv tạo từ thép 40, 40Cr, 40CrNi có: [] = 300 ÷ 400 (MPa) [] = 150 ÷ 300 (MPa)
Như vậy đòn quay đứng b{o đ{m độ bền theo uốn và xo…n.
3. Tính bền đòn kéo dọc
Đòn kéo dọc chịu lực kéo nén dưới tác dụng của lực Q đ„ tính w trên và có trị số
là : 6750(N). Đòn kéo dọc có tivt diện tròn rỗng đường kính ngoài là 25 (mm) và
đường kính trong là 17 (mm).
Ứng suất kéo nén được tính theo công thức: (39)
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 48
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI Trong đó:
F: là diện tích tivt diện của đòn. F = = = 263,7 (mm 2) = = 25,6 (MPa)
Đòn kéo dọc được chv tạo từ thép CT30 có: = 40 (MPa)
Tính ‚n định của thanh kéo dọc bằng cách tìm lực tới hạn Pth: 2. . E Jmin Pth 2 .l (40) Trong đó:
E: mô đun đàn hƒi khi kéo E = 2.10 (MPa); 5
: hệ số liên kvt với khớp czu = 1;
l: chiều dài thanh kéo dọc l =720 (mm);
Jmin: mô men quán tính tivt diện thanh ta có: 4 4 .(D d ) J min 64 (41) Ở đây:
D là đường kính ngoài thanh kéo dọc D = 25 (mm);
d là đường kính trong thanh kéo dọc d = 17 (mm). Jmin = = 15067 (mm 4) Vậy: Pth = = 57310 (N)
Hệ số dự tr~ ‚n định: n 1,8 3,0 n = = = 8,5
Như vậy đòn kéo dọc đ{m b{o độ bền.
4. Tính bền đòn kéo ngang
Đòn kéo ngang được tính theo sức bền kéo nén, ‚n định của thanh kéo dọc.
Thanh kéo dọc chịu nén dưới tác dụng của lực N, lực N là lớn nhất khi lực phanh
sinh ra là lớn nhất. Lực phanh max được tính theo công thức: P = m .G . pmax 1p 1 (42) Trong đó:
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 49
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
G1: t{i trọng đặt lên czu trước trong trạng thái tĩnh G1 = 13500 (N);
m1p: hệ số phân bố lại t{i trọng lên czu trước khi phanh m1p = 1,4;
: hệ số bám gi~a lốp và mặt đường = 0,75.
Ppmax = 1,4.13500.0.75 = 14175 (N)
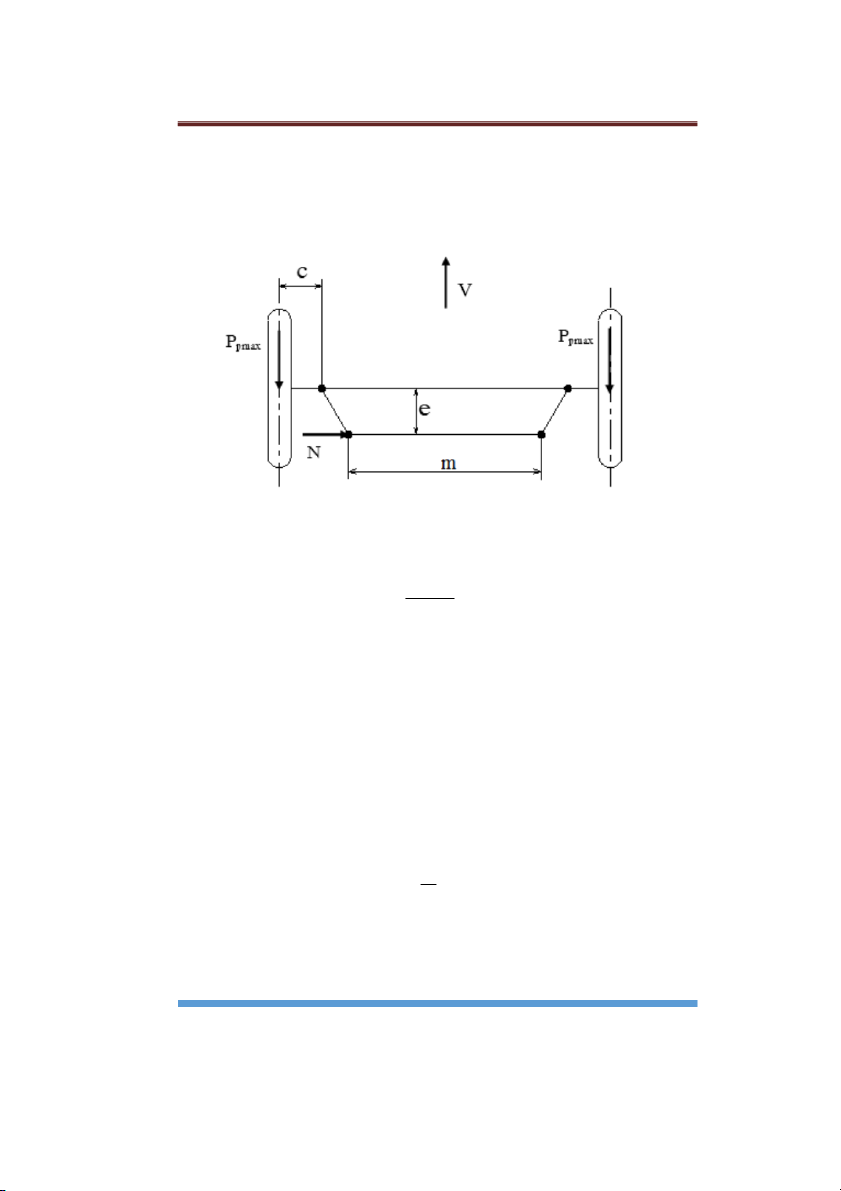
Hình 36: Sơ đồ lực tác dng lên đòn ngang hình thang lái
Lực tác dụng lên đòn ngang được tính theo công thức: P .c pmax N e (43) Trong đó:
c, e là các kích thước trên hình vy với e = 130 (mm), c = = = 90 (mm) Vậy nên: N = = 9813,5 (N)
Đòn kéo ngang được chv tạo bằng thép ống CT30 có: [ b] = 35 (MPa)
Với hệ số dự tr~ bền ‚n định n = 2 ta có: [ b] = 17,5 (MPa)
Ứng suất nén của đòn kéo ngang: N n Ft (44)
Đường kính ngoài của đòn kéo ngang D = 30 (mm);
Đường kính trong của đòn kéo ngang d = 20 (mm). F t = = = 392 (mm 2)
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 50
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI = = 25 (N/mm 2) bằng 25 (MPa)
Ứng suất uốn giới hạn khi nén: = (45) Trong đó:
E: mô đun đàn hƒi khi kéo E = 2.10 (MPa); 5 J 4
t: mô men quán tính của tivt diện đòn kéo Jt = == 31890 (mm ); F 2
t: tivt diện đòn kéo ngang Ft = 392 (mm );
l: chiều dài đòn kéo ngang l = 1290 (mm). Vậy nên ta có: = = 96,4 (MPa)
Độ dự tr~ ‚n định của đòn kéo trong kvt cấu hoàn thiện: n od = = = 3,85
Vậy đòn kéo ngang đ{m b{o độ bền và ‚ định.
5. Tính bền đòn bên
Hình 37: Biểu đồ mô men uốn của đòn bên
Theo như bi}u đƒ mô men ta có: M 0
A = l.N.cos = 190.9813,5.cos16 = 1792334 (Nmm)
Đòn bên làm bằng thép 45: [] = 400 (MPa)
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 51
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI Mô men uốn: M A Wu (45) Trong đó: W 3 u = = = 5250 (mm ) Wu: mô men c{n uốn Ở đây:
b: chiều rộng đòn bên b = 35 (mm);
h: chiều cao đòn bên h = 30 (mm). Vậy nên: = = 341 (N/mm ) bằng 341 (MPa) 2 Hệ số an toàn: n = = = 1,17
Như vậy đòn bên đ{m b{o điều kiện bền.
6. Tính bền khớp cu (Rô tuyn)
Khớp czu được bố trí trên đòn kéo dọc, đòn ngang hệ thống lái. Chúng là khâu
quan trọng của dẫn động lái. Các khớp czu được phân loại theo cách thức bŠ đ…p
khe hw của các bề mặt làm việc khi chúng bị mòn. Hiện nay trên ô tô thường s€ dụng hai loại khớp czu:
Khớp czu có lò xo nén đặt hướng kính;
Khớp czu có lò xo nén đặt hướng trục.
Vật liệu chv tạo khớp czu là thép 40XH có cơ tính: [] =35 (MPa) [] =70(MPa)
Với điều kiện là khớp làm việc w chv độ t{i trọng động và chịu va đập. Khớp
czu được ki}m nghiệm độ bền theo ứng suất chèn dập tại vị trí làm việc và ki}m
tra đô bền c…t tại vị trí có tivt diện nguy hi}m.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 52
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Hình 38: Sơ đồ kết cấu khớp cu (Rô tuyn) Kiểm tra bền khớp cầu
Như phzn tính bền thanh kéo ngang lực tác dụng lên khớp czu cũng chính là lực
tác dụng lên thanh kéo ngang khi phanh. N = 9813,5 (N)
Như phzn tính bền thanh kéo dọc lực tác dụng lên khớp czu cũng chính là lực
tác dụng lên thanh kéo dọc khi mô men c{n quay vòng lớn nhất và không có cường hóa. Q = 675 (N)
Sau khi so sánh hai giá trị lực này ta lấy trị số N = 9813,5 (N) làm số liệu tính toán ki}m bền khớp czu.
Tính ứng suất chèn dập tại bề mặt làm việc của khớp czu. Ta có: F = = = 942 (mm ) 2
D: đường kính khớp czu D = 30 (mm) = = 10,4 (N/mm ) bằng 10,4 (MPa) 2
Hệ số an toàn: n = = = 3,36
Như vậy khớp czu th†a m„n điều kiện chèn dập tại bề mặt làm việc của khớp czu w thanh kéo dọc.
Ki}m tra khớp czu theo điều kiện c…t
Ki}m tra khớp czu tại tivt diện nguy hi}m nhất.
Ứng suất c…t được tính theo công thức: N c Fc (46)
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 53
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI Trong đó:
Fc: là tivt diện của Rô tuyn tại vị trí có tivt diện nguy hi}m nhất (tại chỗ th…t nh†
của Rô tuyn như trên hình 38). F 2 c = = = 314 (mm ) Ở đây:
d: đường kính tại chỗ th…t của Rô tuyn d = 20 (mm). = = 31,2 (N/mm ) bằng 31,2 (MPa) 2 Hệ số an toàn: n = = = 2,24
Như vậy khớp czu th†a m„n điều kiện c…t tại tivt diện nguy hi}m. CHƯƠNG IV
THIT K HỆ THNG CƯNG HA LI I.
CC YÊU CU CỦA CƯNG HA LI
Khi hệ thống của trợ lực lái có sự cố thì hệ thống lái vẫn có th} làm
việc. Nvu có hư h†ng x{y ra làm ngưng việc cấp dzu từ bơm đvn cơ
cấu lái thì người lái vẫn có th} điều khi}n được xe.
Đ{m b{o lực lái thích hợp: công dụng chính của trợ lực là gi{m lực
đánh lái, mức độ gi{m lực lái ph{i phŠ hợp với từng điều kiện chuy}n
động của xe. Nói chung, czn lực lái lớn hơn khi xe đứng yên hay chạy
chậm. Ở tốc độ trung bình czn lực lái nh† hơn và lực lái gi{m dzn khi
tốc độ tăng. Ch• czn lực lái nh† khi tốc độ xe cao vì ma sát gi~a bánh
xe và mặt đường gi{m. Nói cách khác ph{i đạt được lực lái phŠ hợp w
bất kỳ d{i tốc độ nào và cŠng lúc đó “ c{m giác đường” ph{i được truyền tới người lái.
Kh…c phục hiện tượng tự cường hóa khi ô tô vượt qua chỗ lõm, đường
xấu. Có kh{ năng cường hóa lúc lốp xe bị h†ng, đ} khi đó người lái
vừa phanh ngặt, vừa gi~ được hướng chuy}n động ban đzu của xe.
Thời gian tác động của cường hóa ph{i tối thi}u.
Như vậy s€ dụng hệ thống trợ lực lái ph{i đ{m b{o tính năng vận hành của xe,
gi{m được lực đánh lái. Tuy nhiên, hệ thống lái có trợ lực kvt cấu phức tạp hơn
và khối lượng b{o dưỡng cũng tăng thêm lên so với hệ thống lái không có trợ lực. II.
LỰA CHỌN PHƯƠNG N B TRÍ CƯNG HA LI
Đối với loại xe đang thivt kv là loại xe t{i trung bình vận t{i hàng hóa trong điều
kiện qu„ng đường ng…n. T{i trọng tác dụng lên các bánh xe dẫn hướng lớn do đó
lực lái lớn nhất mà người lái ph{i đặt lên vành tay lái nhằm làm gi{m bớt sức lao
động cho người lái, đƒng thời làm tăng tính ‚n định cho xe khi ô tô quay vòng.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 54
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
1. Một số phương án bố trí cường hóa hệ thống lái
Trên xe ô tô bố trí trợ lực lái dạng thủy lực có kvt cấu gọn. Hệ thống trợ lực lái
là một hệ thống tự điều khi}n, bwi vậy nó bao gƒm: nguƒn năng lượng, van phân
phối và xilanh lực. TŠy thuộc vào việc s…p xvp các bộ phận trên vào hệ thống lái
có th} chia ra các phương án sau:
Van phân phối, xilanh lực đặt chung trong cơ cấu lái;
Van phân phối, xilanh lực đặt thành một cụm, tách biệt với cơ cấu lái;
Van phân phối và cơ cấu lái đặt thành một cụm, tách biệt với xilanh lực;
Van phân phối, xilanh lực và cơ cấu lái đặt riệng biệt với nhau.
a) Van phân phối, xilanh lực đặt chung trong cơ cấu lái
Phương án bố trí này giống như xe ZIN – 130, van phân phối, xilanh lực được
bố trí chung với cơ cấu lái. Ưu đi}m của phương pháp bố trí này là gọn và dễ bố
trí trên xe, ngoài ra các đường ống là ng…n nhất cho nên tránh được nh~ng kh{
năng phát sinh dao động do sự không ‚n định động lực học do cường hóa gây nên.
Tuy nhiên nhược đi}m chính của phương pháp bố trí này là hzu như toàn bộ các
chi tivt của dẫn động hệ thống lái ph{i chịu tác dụng của mô men c{n quay vòng
toàn bộ của các bánh xe dẫn hướng. Điều này làm tăng độ bivn dạng đàn hƒi của
hệ thống lái và hậu qu{ làm tăng kh{ năng phát sinh dao động của các bánh xe
dẫn hướng. S€ dụng phương pháp này là không có lợi do ph{i tăng khối lượng
các chi tivt dẫn động lái và cơ cấu lái.
Hình 39: Bộ cường hóa lái bố trí cơ cấu lái van phân phối v xilanh lực thnh một cm 1.Đòn quay đứng 2.Thanh kéo dọc 3.Đòn quay ngang
4.Cơ cấu xilanh lực, van phân phối và cơ cấu lái 5.Czu dẫn hướng
6.9.10.Cơ cấu hình thang lái 7.Trục lái 8.Vành tay lái 11.Bánh xe dẫn hướng
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 55
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI 12.Trục quay
b) Van phân phối, xilanh lực đặt thành một cụm, tách biệt với cơ cấu lái
Trong phương án này van phân phối và xilanh lực được bố trí chung thành một
cụm trên thanh kéo dọc. Ki}u bố trí như thv này cho phép ta có th} s€ dụng nhiều
cơ cấu lái khác nhau. Tuy nhiên khuynh hướng gây nên sự dao động của bánh xe
dẫn hướng sy cao hơn so với ki}u bố trí cơ cấu lái, van phân phối và xilanh lực thành một cụm.
Bố trí ki}u này khi tăng t{i tức là khi tăng đường kính của xilanh lực thì không
đ{m b{o lái nhẹ bwi vì khi quay vòng nh~ng lực thành phzn bên tác dụng lên đòn
quay đứng từ thanh kéo dọc (lực thành phzn hướng kính tác dụng lên v† van
phân phối) sy c{n trw chuy}n dịch của con trượt và chính nguyên nhân này làm
tăng đáng k} lực w vành tay lái.
Hình 40: Bộ cường hóa bố trí cơ cấu lái riêng xilanh lực v van phân phối
thnh một cm riêng
1.Cơ cấu lái 7.Trục lái
2.Thanh kéo dọc 8.Vành tay lái
3.Đòn quay ngang 11.Bánh xe dẫn hướng
4.Cơ cấu xilanh lực và van phân phối 12.Trục quay
5.Czu trước của bánh xe dẫn hướng
6,9,10.Cơ cấu hình thang lái
c) Van phân phối và cơ cấu lái đặt thành một cụm, tách biệt với xilanh lực
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 56
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Hình 41: Bộ cường hóa bố trí van phân phối cơ cấu lái v xilanh lực đặt riêng rẽ
1.Van phân phối. 7.Trục lái.
2.Thanh kéo dọc. 8.Vành tay lái.
3.Đòn quay ngang. 11.Bánh xe dẫn hướng.
4.Cơ cấu lái. 12.Trục quay.
5.Czu trước của bánh xe dẫn hướng. 13.Xilanh lực.
6, 9, 10.Cơ cấu hình thang lái.
Ở phương án này, van phân phối được bố trí chung trong cơ cấu lái, còn xilanh
lực nằm riêng ry. Trong ki}u bố trí này đòi h†i các đường ống dẫn ph{i dài nhưng
ưu đi}m chính của nó lại là cơ cấu lái và dẫn động lái được gi{m t{i kh†i tác
động của cường hóa lái, công suất của cường hóa lái dễ dàng thay đ‚i do xilanh
lực có th} thay đ‚i tự do cách bố trí.
Trong trường hợp này ta bố trí xilanh lực trên hình thang lái gi{m thi}u lực tác
dụng lên cơ cấu lái và lên dẫn động lái do vậy nó gi{m kích thước của dẫn động
lái và làm gi{m dao động w hệ thống dẫn động do lực c{n quay vòng sinh ra.
d) Van phân phối, xilanh lực và cơ cấu lái đặt riêng biệt với nhau
Hình 42: Bộ cường hóa bố trí van phân phối v cơ cấu lái đặt thnh một
cm, xilanh lực nằm ơ trên hình thang lái
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 57
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
1.Cơ cấu lái 7.Trục lái
2.Thanh kéo dọc 8.Vành tay lái
3.Đòn quay ngang 11.Bánh xe dẫn hướng
4.Van phân phối 12.Trục quay
5.Czu trước của bánh xe dẫn hướng 13.Xilanh lực
6, 9, 10. Cơ cấu hình thang lái
Trong phương án này ta bố trí các cụm cơ cấu lái, van phân phối và xilanh lực
nằm tách biệt với nhau. Nó cũng có đzy đủ nh~ng ưu đi}m của các phương án bố
trí trước như cơ cấu lái và dẫn động lái được gi{m t{i kh†i lực tác động của
cường hóa, công suất của cường hóa dễ dàng thay đ‚i do xilanh lực có th} thay
đ‚i tự do cách bố trí. Tuy nhiên bố trí như phương án này tay lái vẫn không nhẹ
và lực tác động lên van phân phối thay đ‚i do cánh tay đòn thay đ‚i.
Vì kvt cấu các cụm chi tivt của xe nh† gọn, đ} phŠ hợp với hình dáng kích
thước của xe ta ph{i lựa chọn phương án thivt kv cụm cường hóa đ{m b{o các yêu czu sau:
Đ{m b{o được tính năng cường hóa, nhưng vẫn ph{i tạo được “ c{m giác”
lực c{n của mặt đường cho người lái;
Cách bố trí của phương án ph{i phŠ hợp với xe thivt kv;
Giá thành s{n xuất, thay thv ph{i đ{m b{o tính kinh tv;
Dễ dàng tháo l…p, b{o dưỡng và s€a ch~a.
Qua đánh giá và phân tích các ưu, nhược đi}m của các phương án bố trí cường
hóa. Ta thấy phương án (a) là phương án thích hợp nhất đ} tính toán và thivt kv.
2. Chọn van phân phối
Van phân phối có hai dạng được dŠng ph‚ bivn là loại van trượt và loại van
xoay. Loại van trượt có kvt cấu phức tạp. Với cơ cấu lái liên hợp của xe thivt kv,
loại van xoay có kvt cấu gọn, không có độ dịch chuy}n dọc.
3. Nguyên lý lm việc của van phân phối kiểu van xoay
Van ống ngoài (van xoay): D = 40 (mm), d ng tr = 26 (mm).
Có đường dzu đvn d = 7 (mm), được khoan th|ng, hai lỗ cường hóa được khoan
chéo góc d = 4 (mm). Đục mỗi mặt 4 lỗ cách đều nhau, có tất c{ 12 lỗ trên mặt
van. Mặt ngoài có khoét r„nh vuông và mặt trong có khoét r„nh elip. Van được
l…p chặt với trục vít bằng chốt đường kính 3 (mm).
Van ống trong (trục van phân phối): D = 26 (mm), d ng tr = 13 (mm).
Van này ch• có hai loại lỗ: một lỗ trung gian (khi xe đi th|ng) và một lỗ nằm
trên cao đ} hƒi dzu về. Van làm rỗng bên trong. Thanh xo…n nằm cố định trong
van. C{ van ống trong và thanh xo…n được l…p với trục vít bằng một chốt đường
kính 4 (mm), đzu còn lại của thanh xo…n l…p chặt với van ống trong bằng chốt 4
(mm). Mặt bên ngoài van ống trong có r„nh elip đ} dẫn dzu đi cường hóa. Nguyên lý cường hóa:
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 58
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Khi xe đi th|ng: lúc này ba lỗ trung gian trŠng nhau. Dzu đi từ bơm qua lỗ trung
gian vào van ống trong rƒi qua c€a hƒi về bình chứa. Buƒng trái và buƒng ph{i
xilanh bị nén nhẹ nhưng không có sự chênh lệch áp suất gi~a chúng nên không có sự trợ lực lái.
Hình 43: Khi xe đi thẳng
Khi xe ry về một bên: van ống trong có phzn v† nối với các đăng của vành lái.
Khi các đăng xoay, van ống trong cũng xoay, thanh xo…n bị xo…n một góc làm
cho van ống trong và van ống ngoài lệch nhau một góc nh† (kho{ng gzn 3 ) 0 ch•
đủ đ} đường dzu đi th|ng của van ống ngoài có th} đi đvn bên đường dzu czn
cường hóa, đƒng thời hướng mặt bên không czn cường hóa có th} đi về bình chứa.
Hình 44: Khi xe quay sang phải
Hình 45: Khi xe quay sang trái
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 59
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Khi đánh lái mà gi~ nguyên vành lái, khi đó thanh xo…n vẫn đang bị xo…n, dzu
trợ lực tivp tục trợ lực cho một buƒng (trái hoặc ph{i) của xilanh lực tŠy theo
đang quay vòng theo hướng nào. Vì gi~ nguyên vành lái nên thanh răng đứng
yên. Do đó trục vít bị quay theo chiều ngược lại, tức là thanh xo…n không bị xo…n
n~a, các van trw về vị trí trung gian như xe đi th|ng. Khi người lái tivp tục đánh
lái, quá trình lại diễn ra như khi xe quay vòng về một phía đ„ trình bày w trên. III.
TÍNH TON CƯNG HA LI
1. Lực lái lớn nhất đặt lên vnh tay lái
Ta bivt rằng khi chưa có cường hóa lái, muốn quay vòng ô tô thì người lái ph{i
tác dụng một lực rất lớn lên vành tay lái đ} th…ng được lực c{n quay vòng. Nvu
s€ dụng lực này trong một thời gian dài thi người lái sy bị mệt và không an toàn
khi di chuy}n. Do vậy ta ph{i xác định được lực lớn nhất mà người lái ph{i tác
dụng lên vành tay lái. Theo như w trên ta đ„ xác định được lực cực đại tác dụng
lên vành tay lái dựa vào lực c{n của mặt đường. PLmax = 355 (N)
2. Xây dựng đặc tính cường hóa lái
Theo giáo trình thivt kv tính toán ô tô thì đặc tính của cường hóa ch• rõ sự đặc
trưng của quá trình làm việc của bộ cường hóa hệ thống lái. Nó bi}u thị mối quan
hệ gi~a lực mà người lái đặt lên vành tay lái PL và mô men c{n quay vòng của các bánh dẫn hướng Mc. PL = (N)
Qua đây ta thấy khi không có cường hóa lái thì lực đặt lên vành tay lái ch• phụ
thuộc vào mô men c{n quay vòng của các bánh xe dẫn hướng (vì R, , id, ηth là
nh~ng hằng số). Do đó đường đặc tính là nh~ng đường bậc nhất đi qua gốc tọa
độ.Theo tính w phzn trước khi quay vòng ô tô tại chỗ mô men c{n quay vòng là
lớn nhất, tọa độ xác định đi}m này trên đường đặc tính là B [355; 1020]. Vậy
đường đặc tính được xác định PL = f(Mc) sy đi qua gốc tọa độ và đi qua đi}m B [355;1020]
Khi hệ thống lái được l…p cường hóa đường đặc tính của nó cũng bi}u thị mối
quan hệ gi~a lực tác dụng lên vành tay lái và mô men c{n quay vòng của các
bánh xe dẫn hướng Mc. Đây cũng là mối quan hệ bậc nhất.
Khi con trượt của van phân phối w vị trí trung gian thì lực cường hóa quy dẫn
lên vành tay lái Pc = 0 nên mô men c{n quay vòng Mc = 0.
Do bộ cường hóa được thivt kv w van phân phối có lò xo định tâm. Khi nh~ng
va đập w mặt đường truyền ngược lên vành tay lái nvu nằm trong giới hạn lực nén
sơ bộ ban đzu của lò xo thì lực đó được truyền lên vành tay lái. Nvu như lực
ngược đó mà vượt quá giới hạn đó thì lò xo sy được nén tivp dẫn đvn con trượt
van phân phối bị lệch về một phía và bộ cường hóa b…t đzu làm việc. Cụ th}, đ}
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 60
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
bộ cường hóa làm việc thì lực đặt lên vành tay lái ph{i lớn hơn 25 (N). Ở giai
đoạn này đặc tính bi}u thị sy trŠng với đặc tính khi chưa có bộ cường hóa.
Tại đi}m A [25: 71,8] thì bộ cường hóa b…t đzu làm việc.
Khi lực đặt lên vành tay lái lớn hơn 25 (N) đường đặc tính đặc trưng cho hoạt
động của cường hóa w giai đoạn này cũng là đường bậc nhất nhưng có tốc độ
thấp hơn so với đường đặc tính khi chưa có cường hóa (độ dốc này czn thivt ph{i
có đ} đ{m b{o cho người lái có c{m giác sức c{n của mặt đường tác dụng lên
vành tay lái). Khi mô men c{n quay vòng lớn hơn Mc = 1020 (Nm) thì hệ thống
lái làm việc như hệ thống lái cơ khí ban đzu (cường hóa đ„ làm việc hvt kh{
năng). Cụ th} là người lái muốn quay vòng ô tô thì ph{i tác dụng lên vành tay lái một lực PL Pc.
Đƒ thị các đường đặc tính khi chưa cường hóa lái PL = f(Mc) và được l…p bộ
cường hóa Pc = f(Mc) được th} hiện w hình dưới đây. Ta thấy rằng:
Đặc tính khi chưa có cường hóa là đường bậc nhất, đoạn OB;
Đặc tính khi có cường hóa là đường bậc nhất g„y khúc và thấp hơn đường
đặc tính khi chưa có cường hóa;
Đoạn OA: PL = Pc = f(Mc). Lực do người lái hoàn toàn đ{m nhận;
Đoạn AC: Pc = f(Mc). Bi}u thị lực mà người lái c{m nhận về chất lượng
mặt đường. Đi}m C [150;1020], chọn Pc = 150 (N);
Từ C trw đi: Pc = f(Mc) song song với đường PL = f(Mc).
Hiệu số các tọa độ của hai đường Pc và PL chính là lực tạo nên bwi bộ cường
hóa. Lực này ph{i phụ thuộc vào áp suất môi trường làm việc và đường kính của xilanh.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 61
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Lực cường hóa cực đại quy dẫn về vành tay lái:
PH = PLmax – Pc = 355 – 150 = 205 (N)
Nvu chọn Pc lớn thì quay riêng các bánh xe dẫn hướng tại chỗ sy nặng hơn, còn
nvu chọn Pc quá nh† thì người lái sy không đủ c{m giác về chất lượng mặt đường.
3. Xác định lực tính toán
Với ô tô t{i đ} gi{m cường độ lao động của người lái thì lực lái lớn nhất mà
người lái ph{i sinh ra là 150 (N). Trong khi đó nvu không có cường hóa thì lực
lớn nhất mà người lái ph{i sinh ra là 355 (N) như đ„ tính w trên. Khi quay vòng
tại chỗ mô men c{n quay vòng là lớn nhất. Mcmax = 1020 (Nm)
Lực thực tv mà xilanh lực ph{i sinh ra:
Ta có lực cường hóa cực đại quy dẫn về vành tay lái là: PH = 205 (N)
Mô men c{n quay vòng lớn nhất của xe sinh ra trên trụ quay đứng là: Mc = 1020 (Nm)
Trong đó xilanh lực ph{i sinh ra mô men có độ lớn bằng: Mch = k.Mc Ở đây:
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 62
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
k: là phzn trăm lực mà bộ cường hóa sinh ra trên vành tay lái. Khi quy dẫn lên vành tay lái thì: k = . 100% = . 100% = 57,7 % Trong đó:
PLmax: lực cực đại trên vành tay lái mà người lái ph{i sinh ra khi quay vòng ô tô
tại chỗ khi chưa có cường hóa PLmax.
Pc: lực cực đại trên vành tay lái mà người lái ph{i sinh ra khi có bộ cường hóa làm việc Pc = 150 (N).
Lực mà xilanh ph{i sinh ra là: P xl = = = 4527 (N)
e: là kho{ng cách từ đòn kéo ngang tới czu dẫ hướng e = 130 (mm)
4. Tính toán xilanh lực
Kích thước của xilanh lực czn ph{i đủ lớn đ} đ{m b{o sinh ra được lực czn thivt
trong khi áp suất chất l†ng trong hệ thống trợ lực lái là có giới hạn. Nvu kích
thước nh† thì áp suất dzu trợ lực ph{i lớn và ngược lại. p suất dzu là do bơm
dzu sinh ra, nó không th} quá lớn được.
a) Xác định đường kính trong của xilanh lực và đường kính cần piston
Đường kính trong của xilanh lực được tính theo công thức: 4.Pxl 2 D d x .P0 Trong đó:
Dx: đường kính trong của xilanh lực;
P0: là áp suất cực đại trong hệ thống cường hóa P = 6 (MPa); 0
d: là đường kính czn đẩy piston, chọn d = 22 (mm);
Pxl: lực mà xilanh ph{i sinh ra Pxl = 4527 (N). Nên ta có: Dx = = 77 (mm) Chọn D = 78 (mm). x
b) Chọn đường kính ngoài và kiểm bền xilanh lực
Lấy chiều dày của thành xilanh là 8 (mm) thì đường kính ngoài của xilanh lực là: Dn = 78 + 2.8 = 94 (mm)
Ứng suất tác dụng lên thành xilanh: = .P + P 2 o = o
.6 + 6 = 38,5 (N/mm ) bằng 38,5 (MPa)
Vật liệu làm xilanh là thép 40XH:
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 63
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI [] = 80 (MPa) [] = 57,1 (MPa) Vậy:
xilanh lực th†a m„n điều kiện bền.
c) Xác định hành trình và thể tích làm việc của xilanh lực
Hình 46: Sơ đồ hnh trình dịch ngang của thanh kéo khi xe quay vòng lớn nhất
Theo như ta đ„ chọn thì góc quay của bánh xe khi hvt lái là 37 0so với vị trí
trung gian. Hình minh họa trên th} hiện tay lái w vị trí trung gian bằng nét liền,
tay lái w vị trí tận cŠng bên trái bằng nét đứt.
Góc quay toàn bô của đòn quay đứng là: = .370 = 370
Góc quay lớn nhất của bánh răng rẻ quạt từ vị trí trung gian bằng góc quay lớn
nhất của đòn quay đứng, do đó góc đánh lái lớn nhất của vô lăng từ phía trái sang ph{i là: αrq = 370
Hành trình SC của piston là chiều dài cung tròn của cung răng ứng với góc quay lớn nhất αrq. S C =2. = 2. = 46 (mm)
Vậy nên th} tích làm việc của xilanh lực là: V 3 lv = .h (mm ) Trong đó:
Dx: đường kính trong của xilanh lực D = 78 (mm); x
h: hành trình làm việc của piston.
Như vậy ta có: Vlv = . 46 = 219693(mm 3)
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 64
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
d) Xác định chỉ số hiệu quả tác dụng của cường hóa
Theo giáo trình Tính toán và thivt kv tập 2 – 1971 thì ch• số hiệu dụng của
cường hóa được xác định qua hệ số k: k = = = 2,36
Theo qui phạm thì hệ số k nằm trong phạm vi cho phép [k] = 2 ÷ 6 w đây k =
2,36 nằm trong kho{ng cho phép. Vậy các thông số của bộ cường hóa mà ta đang
tính toán th†a m„n điều kiện này.
5. Tính chọn bơm trợ lực
Với bơm cung cấp dzu cho cường hóa thì đòi h†i ph{i cung cấp đủ dzu cho
cường hóa làm việc. Lưu lượng của bơm được xác định từ điều kiện là làm thv
nào đ} xilanh lực của cường hóa ph{i kịp làm quay các bánh xe dẫn hướng nhanh
hơn điều mà người lái có th} làm được. Nvu không đ{m b{o được điều kiện này
thì ứng với trường hợp quay vòng nhanh thì người lái sy ph{i tiêu hao một lực
lớn không nh~ng đ} th…ng được lực c{n quay vòng w các bánh xe dẫn hướng mà
còn đ} đẩy dzu di chuy}n từ khoang bên này sang khoang bên kia của xilanh lực
vì bơm không đủ lưu lượng.
a) Tính lưu lượng của bơm
Lưu lượng của bơm được tính theo thời gian quay vòng và th} tích làm việc của xilanh lực: Vlv Q t Trong đó: Q: lưu lượng của bơm; V 3
lv: th} tích làm việc của xilanh Vlv = 219693 (mm );
t: thời gian quay vòng của xe t= 2,81 (s). Ta có: Q = = 78182 (mm 3/s)
Thực tv lưu lượng của bơm còn ph{i lớn hơn như vâ y đ} bŠ vào sự rò r• dzu w
van phân phối. Lưu lượng rò r• là Q:
∆Q = (0,05 ÷ 0,1)Q ta chọn ∆Q = 0.08Q Tức là:
Qtt = Q + Q = 1,08Q = 1,08.78182 = 84436 (mm3/s)
Năng suất tính toán của bơm w đây ph{i đạt được w số vòng quay của đô ng cơ
cao hơn số vòng quay không t{i là 25% và áp suất đạt được là 0,5Pmax. b) Chọn bơm cường hóa
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 65
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Bơm cường hóa là cum phức tạp và chịu t{i lớn của hê thống cường hóa thủy
lực. Điều kiê n làm viê c của bơm gây nên bwi chv đô t{i trọng thay đ‚i lớn, ứng
suất nhiê t cao và sự {nh hưwng của môi trường xung quanh.
Bơm được s€ dụng cho cường hóa có nhiều loại như bơm piston, bơm trục vít,
bơm bánh răng, bơm cánh gạt. Hiê n nay trên các xe hiê n đại người ta s€ dụng
chủ yvu là loại bơm bánh răng và bơm cánh gạt.
Qua phân tích các yêu czu và điều kiê n làm viê c của bơm cường hóa ta chọn
loại bơm cánh gạt tác dụng kép vì loại bơm này có kvt cấu nh† gọn, hiê u suất có
th} đạt tới 0,7 ÷ 0,8, áp suất có th} đạt 10 (MPa), lưu lượng từ 5 ÷ 200 (l/phút).
Căn cứ vào lưu lượng thực tv của bơm ta đ„ tính toán w phzn trước ta chọn loại
bơm cánh gạt tác dụng kép có lưu lượng riêng là 90000 (mm3/s).
6. Tính toán các chi tiết của van phân phối
a) Tính góc xoay của van xoay
: khe hw gi~a mép van ống trong và van ống ngoài: Trong đó:
Q: lưu lượng dzu cung cấp cho bô cường hóa làm viê c Q = 84436 (mm3/s);
d1: đường kính lõi van, chọn d = 26 (mm); 1
h: đô dài chiều dọc r„nh van h = 21 (mm);
g: Gia tốc trọng trường g = 10 (m/s ) bằng 1000 (mm/s 2 2);
t‚n thất áp suất w hành trình không t{i = 0,003 (N/mm3);
: trọng lượng riêng của dzu = 0,9 (g/cm ) bằng 9.10 3 -6 (N/mm3);
ψ: t‚n thất cục bô ψ = 3,1. = = 1,7 (mm)
Khi tính đvn sự tivt lưu trong các đường r„nh dzu lấy: = 2 (mm).
: đô trŠng khớp cực đại của mép van ống trong và van ống ngoài (đô
“chờm” của van) được xác định từ điều kiê n lượng lọt dzu của van xoay (Q ): 1
Do quá nh† nên lấy = 0,1 (mm)
Vâ y hành trình toàn bô van xoay về mô t phía tính theo chu vi van: = + = 2 + 0,1 = 2,1 (mm) b) Các thông số khác
Góc xo…n của thanh xo…n đ} mw van:
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 66
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
: Hành trình theo chu vi của van xoay khi cường hóa làm viê c;
d: đường kính lõi van d = 26 (mm). Nên ta tính được :
Vâ y thanh xo…n sy ph{i xo…n đi mô t góc là 9,20 thì đường dzu cường hóa mới làm viê c.
Góc quay tự do toàn bô của vành tay lái khi có cường hóa:
: đô rơ của hê thống lái khi không có cường hóa = 80. = 80 + 2.9,2 = 26,4 0 0 c) Tính toán thanh xoUn
Thanh xo…n có vai trò giống như lò xo định tâm trong kvt cấu van trượt.
Chọn vâ t liê u chv tạo thanh xo…n là thép lò xo G60A có modul đàn hƒi: G = 8.104(N/mm ) 2
Đường kính của thanh xo…n ph{i th†a m„n sao cho khi b…t đzu trợ lực, ứng với
lực đă t lên vành tay lái là PVL0 = 25 (N) thì thanh xo…n ph{i xo…n mô t góc 9,20.
Ứng suất xo…n của thanh xo…n được xác định theo công thức:
Góc xo…n của thanh xo…n được xác định theo công thức: nên ta có:
Chiều dài của thanh xo…n: L = 92 (mm) D = = = 4,4 (mm)
Chọn đường kính của thanh xo…n là: D = 5 (mm) Hình 47: Thanh xo\n
Ki}m nghiê m điều kiê n bền:
Vâ y thanh xo…n th†a m„n điều kiê n bền.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 67
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI CHƯƠNG V
BO DƯỠNG Vf SỬA CHỮA HỆ THNG LI I.
BO DƯỠNG KỸ THUẬT HỆ THNG LI
1. Bảo dưỡng kỹ thuật hệ thống
Trong b{o dưỡng kỹ thuật hàng ngày, ki}m tra kho{ng chạy tự do
của tay lái và c{ tác động của hệ thống lái đối với người đi đường
của ô tô. Czn xem tình trạng bên ngoài các tấm đệm khít của cacte
cơ cấu lái đ} ngăn ngừa tình trạng rò r• dzu nhờn;
Trong b{o dưỡng kỹ thuật cấp 1: ki}m tra độ kín khít của nh~ng
mối ghép nối hệ thống trợ lái thủy lực và việc b…t chặt bơm trợ lái
thủy lực. Vặn chặt các đai ốc b…t chặt cơ cấu lái vào dzm ô tô, khớp czu của đòn lái.
B{o dưỡng kỹ thuật cấp 2 gƒm có: cọ r€a bzu lọc của bơm trợ lái
thủy lực, ki}m tra độ b…t chặt đòn quay đứng vào trục và khớp czu
vào đòn quay đứng. Ki}m tra khe hw trong cơ cấu lái và nvu khe hw
vượt quá giới hạn quy định thì hiệu ch•nh lại.
Dzu cho hệ thống lái là loại Shell Spirax S2 ATF D2, khi thay dzu
chú ý dŠng khí có áp lực cao đ} đẩy hvt dzu cặn ra kh†i cacte. Sau
khi nạp dzu mới, tivn hành x{ air bằng cách n‚ máy, đánh vô lăng
hvt cỡ sang một phía, gi~ một thời gian rƒi làm tương tự với phía
còn lại. Làm như vậy vài lzn đ} đẩy hvt không khí ra ngoài.
2. Sửa chữa chi tiết hệ thống lái
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 68
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Đ} xác định mức độ mài mòn và tính chất s€a ch~a, ph{i tháo rời chi tivt trong hệ thống lái.
Khi tháo tay lái và đòn quay đứng ph{i dŠng vam tháo. Nh~ng hư h†ng chính
của hệ các chi tivt hệ thống lái là: mòn thanh răng – bánh răng, ống lót, vòng bi
và ‚ l…p vòng bi. Mặt bích b…t chặt cacte bị sứt mẻ và nứt, mòn bạc w cacte dành
cho ‚ bi kim đỡ ‚ trục của đòn quay đứng và các chi tivt của khớp czu thanh
chuy}n hướng, thanh chuy}n hướng bị cong.
Ph{i thay thanh răng của cơ cấu lái nvu bề mặt làm việc của thanh răng mòn rõ
rệt hay lớp tôi bị tróc ra. Th{i b† cung răng nvu bề mặt có khe nứt hay vvt lõm.
C‚ trục của đòn quay đứng nvu mòn thì ph{i phục hƒi bằng cách mạ crôm rƒi
mài theo kích thước danh nghĩa. C‚ trục có th} phục hƒi bằng cách l…p vào cacte
nh~ng ống lót bằng đƒng thanh đ„ được mài theo kích thước s€a ch~a. Đzu có
ren của đzu trục đòn quay đứng nvu bị cháy thì phục hƒi bằng cách hàn đ…p bằng
hƒ quang điện rung. Trước hvt ph{i tiện hvt ren củ trên máy tiện rƒi hàn đ…p kim
loại, tiện trên kích thước danh nghĩa và c…t ren mới. Trục của đòn quay đứng nvu bị xo…n thì ph{i loại b†.
Các ‚ l…p vòng bi cơ cấu lái nvu bị mòn thì phục hƒi bằng cách l…p thêm chi tivt
phụ. Muốn vậy ph{i khoan rộng lỗ, l…p ép vào đó một ống lót và gia công đường
kính trong của nó theo kích thước của vòng bi.
Nh~ng chỗ sứt mẻ và khe nứt trên mặt bích cacte kh…c phục bằng phương pháp
hàn. Thường dŠng hàn khí, có nung nóng toàn bộ chi tivt trước khi hàn.
Lỗ trên cacte dành cho ‚ bi kim đỡ trục đòn quay đứng nvu bị mòn thì doa lại
theo kích thước s€a ch~a.
Trong cơ cấu dẫn đô ng lái, chốt czu và máng lót thanh truyền hướng ngang bị
mòn nhanh hơn, còn các đzu thì mòn ít hơn. Ngoài ta còn có nh~ng hư h†ng khác
là do mòn lỗ w mút, cháy ren, lõ xo ép các máng đệm vào chốt czu bị g„y hoặc yvu.
TŠy theo tính chất mài mòn mà xác định kh{ năng tivp tục s€ dụng của n…p
thanh chuy}n hướng ngang hay thay từng chi tivt. Nvu czn thivt thì tháo rời khớp
của n…p. Muốn vậy, tháo chốt chẻ của nút ren, vặn nút ra kh†i lỗ rƒi tháo chi tivt
ra. Chốt czu bị mòn, bị sứt mẻ hay có vvt xước, czn thay mới. Đƒng thời l…p
máng lót mới của chốt czu. Thay mới các lò xo mòn bị g„y.
Nh~ng hư h†ng đặc trưng của bộ trợ lực lái là không có lực tác dụng w bất kỳ
tzn số quay nào của động cơ, lực không đủ lớn và không đƒng đều khi quay tay
lái sang bên này hay bên kia.
Đ} kh…c phục hư h†ng trên hay tháo rời bơm ra, x{ hvt dzu nhờn, cọ r€a cẩn
thận các chi tivt. Khi tháo l…p và s€a ch~a bơm, không được tách riêng cụm chi
tivt n…p bơm và van chuy}n, stato, rôto và cánh bơm.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 69
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI II.
SỬA CHỮA HỆ THNG LI
Hệ thống lái ph{i đ{m b{o cho ôt ô chạy đúng hướng mong muốn, w bất kỳ điều
kiện đường xá nào và bất kỳ tốc độ nào của ô tô. Người lái không ph{i mất nhiều
công sức đ} điều khi}n vành tay lái, khi xe chạy th|ng cũng như khi thao tác lái.
Trong quá trình vận hành s€ dụng xe, các chi tivt của hệ thống lái thường xuyên
làm việc. Các chi tivt chịu ma sát sy bị mòn, dẫn đvn rơ l†ng do đó làm sai lệch
động học quay vòng, lốp sy bị mòn nhanh và có th} dẫn đvn không an toàn trong
chuy}n động. Vì vậy, ph{i thường xuyên theo dõi, ki}m tra nhằm kịp thời phát
hiện, s€a ch~a, điều ch•nh đ} phục hƒi trạng thái kỹ thuật, điều kiện làm việc
bình thường cho hệ thống lái, nhằm đ{m b{o an toàn chuy}n động cho xe.
Những hiện tượng hư hỏng chính của hệ thống lái
Các hiê n tượng này có th} xuất hiê n riêng ry hoă c cŠng lúc với nhau. a) Đô W rơ vành tay lái
Đô rơ vành tay lái lớn nhất cho phép là 30 (mm), nvu lớn hơn có th} do các nguyên nhân sau:
Vòng bi trục bánh xe bị mòn;
Các khớp czu (rô tuyn) bị mòn;
Ổ bi trong cơ cấu lái bị mòn;
Bánh răng và thanh răng bị mòn;
Bu lông b…t v† của cơ cấu lái bị h†ng.
b) Xp suất của cường hóa lái thủy lực hê W
thống lái không Yn định
Van lưu thông của bơm bị bẩn:
Van lưu thông hạn chv viêc nạp dzu vào bô cường hóa khi số vòng quay
của đô ng cơ tăng lên. Van bị bẩn sy làm cho bô cường hóa làm viê c không
bình thường. p suất trw lên không đều;
Ch• được phép đ‚ vào hê thống cường hóa lái loại dzu sạch và đúng tiêu
chuẩn, khi đ‚ ph{i dŠng phễu lọc sạch. Trong thŠng dzu trên đường dzu
về ph{i có lưới lọc. DŠng dzu bẩn sy làm cho các chi tivt của bơm và bô
cường hóa thủy lực bị mòn nhanh chóng.
ng dẫn dzu của bơm bị vỡ:
p suất dzu không đƒng đều của bô cường hóa thủy lực hê thống lái phát
sinh do dzu bị ch{y rò mạnh qua nh~ng đoạn ống dẫn h†ng.
Bơm dzu không làm viê c hoă c làm viê c không ‚n định:
Ki}m tra dây đai xem có bị trŠng hay h†ng không, nvu bị h†ng ph{i thay
dây đai mới. Lưu ý: dŠng dưỡng đo đô căng dây đai dẫn đô ng ( đai mới:
45 ÷ 55 (kg), đai cũ: 25 ÷ 35 (kg)). Nvu đô căng đai không như tiêu chuẩn h„y thay nó.
Không khí lọt vào hê thống cường hóa lái:
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 70
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
Không khí có th} lọt vào bô cường hóa thủy lực khi thay thv dzu. Điều đó
sy làm cho áp suất bô cường hóa thủy lực không đƒng đều.
Mức dzu của bơm trong bình dzu không đủ hoă c có bọt:
Mức dzu đúng quy định trong bình dzu ph{i lên tới mức đánh dấu. Mức
dzu thấp làm cho khí lọt vào hê thống. Do vâ y ph{i luôn luôn ki}m tra
mức dzu trên bình dzu. Ki}m tra xem có bọt hoă c vẩn đục không, nvu có
bọt hoă c vẩn đục thì x{ khí hê thống lái.
Đv van an toàn của bơm không sivt chă t:
Van an toàn giới hạn áp suất dzu trong hê thống cường hóa lái khi xe chạy
w tốc đô cao hay quá t{i. Cũng có trường hợp bơm b…t đzu làm viê c không
đều, {nh hưwng xấu tới viê c điều khi}n. Thông thường hiê n tượng này là
do đv van an toàn của bơm bị l†ng. Điều này có th} do sivt đv van không
chă t trong quá trình l…p ráp. Đ} phục hƒi lại áp suất quy định của bơm, czn
thivt ph{i sivt lại đv van an toàn.
Lưới lọc của bơm bị bẩn:
Trong bzu lọc có đă t hai lưới lọc. Lưới thứ nhất là đ} lọc sạch dzu khi đ‚
vào hê thống, lưới thứ hai lọc tất c{ dzu đi từ bô cường hóa về bơm.
Trường hợp các lưới lọc bị bẩn, bô cường hóa thủy lực sy không làm viê c được. Vành tay lái bị rung:
Vô lăng bị rung là do áp suất lốp không đều, bánh xe không cân xứng bị
đ{o. Sai lê ch đô chụm lớn. Các khớp czu trong cơ cấu lái bị rơ. Cụm cơ cấu lái bị rơ.
Do vâ y đ} đ{m b{o cho xe có tính dẫn hướng tốt ta ph{i bơm và đo lại áp
suất lốp của các bánh xe nvu bánh xe bị đ{o mà không điều ch•nh được thì
ph{i thay thv điều ch•nh lại đô chụm, điều ch•nh đô rơ của các khớp czu
trong dẫn đô ng lái đúng theo tiêu chuẩn cho phép, điều ch•nh lại đô rơ của cơ cấu lái.
Xe có xu hướng chuy}n đô ng lê ch:
Xe có xu hướng chuy}n đô ng lê ch do áp suất lốp không đều, đô nghiêng
tới hoă c đô nghiêng ngang của quay bánh xe dẫn hướng không cân bằng
(do mòn không đều), dzm czu bị lê ch (do bị bivn dạng), các lò xo của hê
thống treo không đều, chŠng g„y.
Đ} kh…c phục lại hiên tượng này ta czn ki}m tra lại đô nghiêng, phục hƒi
lại bạc trục của trục quay bánh xe dẫn hướng, nvu không phục hƒi được
thì ph{i thay thv. Uốn và đo ch•nh lại dzm czu nvu không được thì ph{i
thay thv. Thay các lò xo bị g„y và chọn lựa đ} l…p lại đ} cho các lò xo ph{i đều nhau.
Tay lái bị rung nhanh và mạnh:
Tay lái bị rung nhanh và mạnh, dô i ngược lại khi bánh xe phía trước chạm
ph{i chướng ngại vâ t là do áp suất lốp quá căng. Thanh gi{m chấn bị
h†ng. Khe hw tự do dẫn đô ng lái quá nh†. Gi{m chấn của trục lái h†ng. Do
vâ y czn ph{i đo lại áp suất của lốp, phục hƒi hoă c thay thv gi{m chấn của
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 71
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
trục lái và gi{m chấn của hê thống treo, điều ch•nh lại khe hw của dẫn
đô ng lái và cơ cấu lái.
Vành tay lái không tr{ về vị trí cân bằng:
Sai góc đăt bánh xe: góc nghiêng ngang và góc dọc trụ đứng, do mòn gây
gi{m hiê u ứng nghịch từ bánh xe lên vành tay lái.
Bơm làm viê c có tivng ƒn:
Do dzu trong bình không đủ, khí lọt vào hê thống thủy lực, trục bơm bị
cong hoă c gioăng đê m c‚ bơm bị hư h†ng, các đê m và gioăng của cơ cấu
lái bị mòn hoă c h†ng, các đường ống cao áp hoă c thấp áp bị h†ng, các đzu nối bị l†ng.
Czn đ‚ dzu đúng mức quy định x{ khí, n…n th|ng lại trục bơm, thay thv
các đê m gioăng làm kín, thay thv các đường ống cao áp và thấp áp bị
h†ng, sivt chă t các đzu nối.
Kiểm tra điều chZnh cơ cấu lái
Điều ch•nh ăn khớp của bánh răng rẻ quạt và thanh răng: khi xe đỗ tại chỗ, t…t
máy, l…c đzu đòn quay đứng dịch chuy}n trong phạm vi 0,5 ÷ 1 (mm) là đạt yêu
czu. Nvu khe hw lớn hơn mức đó, điều ch•nh viê c vào khớp bằng cách nới l†ng
các ê cu điều ch•nh rƒi vă n ê cu điều ch•nh theo chiều kim đƒng hƒ cho đvn khi
trừ b† được hvt khe hw.
Điều ch•nh l…c dọc của trục vít bằng cách điều ch•nh ‚ bi đỡ trục vít. Ổ bi đỡ
trục vít được điều ch•nh đô rơ bằng các đê m điều ch•nh có chiều dày khác nhau.
Điều ch•nh sao cho khi tháo đòn quay đứng ra, t…t máy, lực trên vô lăng bằng 3 (N).
Kiểm tra dẫn đô [ng lái v kh\c phc khe hơ
Cho xe t…t máy tại chỗ, mô t người đánh lái hvt cỡ sang hai bên thâ t nhanh. Mô t
người quan sát phzn dẫn đô ng lái, đô rơ lớn của dẫn đô ng lái sy gây ra tivng kêu
khi quay vô lăng. Viê c kh…c phục chủ yvu là thay các chốt czu và bạc lót đ„ mòn đ} kh…c phục khe hw. Kiểm tra trợ lực lái
Ki}m tra bơm trợ lực: DŠng đƒng hƒ đo áp suất w đzu ra của bơm, áp suất
ph{i đạt 9 (N/mm2). Viê c s€a ch~a tivn hành theo trình tự sau: tháo n…p
thŠng bơm, tháo thŠng ra kh†i thân bơm, tháo n…p bơm, trong khi đó ph{i
gi~ van an toàn bằng mô t chốt công nghê (gi~ trục bơm w tư thv th|ng
đứng và bánh đai w phía dưới), nhấc đĩa phân phối ra kh†i vít cấy, nhấc
stato, rôto cŠng với bô cánh quạt bơm, sau khi đ„ đă t trên rôto mô t vòng
cao su công nghê và đánh dấu vị trí của stato với đĩa phân phối và thân
bơm. Sau khi tháo rời bơm, x{ hvt dzu nhờn và cọ r€a cẩn thâ n các chi
tivt. Khi tháo, l…p và s€a ch~a bơm, không được tách riêng cụm chi tivt
n…p bơm và van chuy}n (van hai ng{), stato, rôto và cánh bơm. Ch• trong
trường hợp czn s€a ch~a hay thay thv mới tháo bánh đai, vòng h„m và
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 72
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
trục bơm cŠng với vòng bi phía trước. Khi th€ nghiê m, czn xem bơm làm
viê c có bị rung đô ng, co giâ t và có tivng gõ hay không, áp suất ph{i tăng
lên dzn dzn. Dzu nhờn trong thŠng không được phép sủi bọt và rò r• qua
các mối l…p ghép và đê m khít;
Ki}m tra các đường ống dẫn và gi…c – co xem có rò r•, nứt vỡ không. Khi
phát hiê n hư h†ng ph{i thay thv kịp thời;
Ki}m tra van phân phối, chủ yvu là ki}m tra các phớt làm kín và các bề
mă t có bị xước, rỗ hay không đ} có biê n pháp kh…c phục.
Sau khi s€a ch~a và ki}m tra xong xuôi các chi tivt, ph{i l…p ráp lại toàn bô t‚
hợp trợ lái thủy lực rƒi điều ch•nh và th€ nghiê m. KT LUÂN
Qua thời gian làm đƒ án tốt nghiê p với sự cố g…ng của b{n thân và đă c biê t là
sự hướng dẫn nhiê t tình của thzy giáo NGUYdN TRỌNG HOAN cŠng toàn th}
các thzy giáo trong bô môn em đ„ hoàn thành nhiê m vụ được giao. Cũng như
tinh thzn chung nhằm làm quen với viê c tính toán và thivt kv em đ„ hoàn thành đƒ án:
Thivt kv hê thống lái có cường hóa cho ô tô t{i 2,5 tấn
Trong đƒ án này em đ„ làm được nh~ng viê c sau:
Nêu lên sự làm viê c của hê thống lái, sự làm viê c ‚n định của hê thống lái,
ki}m nghiê m lại hê thống lái của xe cơ sw là ô tô Huyndai 2,5 tấn;
Tính toán hê thống lái nói chung cũng như hê thống dẫn đô ng và cường hóa lái nói riêng;
Cách b{o dưỡng và s€a ch~a hê thống lái.
Phzn b{n vy em có các b{n vy: B{n vy bố trí chung hê thống lái trên ô tô;
B{n vy các phương án bố trí cường hóa hê thống lái trên ô tô;
B{n vy cụm cơ cấu lái, xi lanh lực và van phân phối;
B{n vy sơ đƒ nguyên lý làm viê
c của hê thống cường hóa lái;
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 73
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
B{n vy các chi tivt tiêu bi}u của hê thống;
B{n vy đƒ thị đô ng học quay vòng và đă c tính cường hóa.
Vì điều kiê n thời gian có hạn, trình đô kinh nghiê m còn bị hạn chv mà khối
lượng công viê c lớn cho nên chất lượng đƒ án còn hạn chv, còn nhiều thivu sót
trong phzn tính toán và kvt cấu có th} chưa hợp lý. Rất mong sự đóng góp ý kivn
của các thzy trong bô môn đ} đƒ án của em được hoàn ch•nh hơn.
Em xin chân thành c{m ơn! Hà Nô i ……2015 Sinh viên thực hiê n NGUYdN TƯNG HƯNG TfI LIÊU THAM KHO
[1]. Lý thuyvt ôtô máy kéo, Nguyễn H~u Cẩn - Dư Quốc Thịnh - Phạm Minh
Thái - Nguyễn Văn Tài - Lê Thị Vàng, Nxb Khoa học và Kĩ thật, 2008.
[2]. Thivt kv và tính toán ô tô máy kéo (I, II, III), Nguyễn H~u Cẩn - Phan Đình Kiên, Giáo trình, 1998.
[3]. Chi tivt máy (I, II), Nguyễn Trọng Hiê p, Nxb Giáo Dục, 1997.
[4]. Thivt kv tính toán hê dẫn đô ng cơ khí (I, II), Trịnh Chất - Lê Văn Uy}n, Nxb Giáo Dục, 1998.
[5]. Trang bị thủy khí trên ô tô và xe máy, Bô môn ô tô Trường Đại học Bách Khoa Hà Nô i, 1999.
[6]. Tính toán sức kéo ô tô, Phạm Minh Thái, 1991.
[7]. Máy thủy lực và truyền đô ng thủy lực, Nguyễn Phú Vịnh.
[8]. Máy thủy lực th} tích, Hoàng Thị Bích Ngọc.
[9]. Chuẩn đoán trạng thái kỹ thuâ t đô ng cơ ô tô, Nguyễn Kh…c Trai, 2000.
[10]. Hướng dẫn làm đƒ án môn học: Thivt kv hê thống lái của ô tô máy kéo bánh xe, Phạm Minh Thái.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 74
Đ N TT NGHIÊP THIT K HÊ THNG LI XE TI
[11]. Tính toán thivt kv hê thống lái, Nguyễn Văn Chưwng.
[12]. Kvt cấu ô tô, Nguyễn Kh…c Trai - Nguyễn Trọng Hoan - Hƒ H~u H{i -
Phạm Huy Hường - Nguyễn Văn Chưwng - Trịnh Minh Hoàng, Nxb Bách Khoa Hà Nô i, 2009.
[13]. Thivt kv tính toán ô tô, Nguyễn Trọng Hoan, 2011.
[14]. Kỹ thuâ t đo, Ninh Đức Tốn - Nguyễn Trọng HŠng, Nxb Giáo Dục, 2007.
NGUYdN TƯNG HƯNG – Ô TÔ Vf XE CHUYÊN DgNG K55 75
Tài liệu liên quan:
-

Đồ án cơ điện tử thông minh theo trục Y
15 8 -

Chương 5: Cầu Chủ Động Trên Ô Tô - Truyền Lực & Phân Tích Kết Cấu
17 9 -

Báo cáo bài tập lớn cuối kỳ - Đề tài Smart Home môn Kỹ thuật cơ điện tử | Trường Đại học Bách Khoa Hà Nội
78 39 -

Bài tập lớn Thiết kế hệ thống giám sát độ ẩm đất trồng cây trong nhà kính môn Kỹ thuật cơ điện tử | Trường Đại học Bách Khoa Hà Nội
78 39 -
Báo cáo thực tập tốt nghiệp môn Kỹ thuật cơ điện tử | Trường Đại học Bách Khoa Hà Nội
133 67