ĐỒ ÁN: TRUYỀN ĐỘNG ĐIỆN TÊN ĐỀ TÀI : Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác–Trường Đại học bách khoa – đại học Đà Nẵng
CHƯƠNG I: PHÂN TÍCH YÊU CẦU CÔNG NGHỆ
1.1 Bài toán thiết kế hệ truyền động điện.
* Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác.
+ Chiều dài băng tải 20m, chiều rộng 0,5m
+Khối lượng bao gạo: 10Kg
+Tốc độ 0,2m/s
+Sản lượng 16 tấn/h
ĐỒ ÁN: TRUYỀN ĐỘNG ĐIỆN TÊN ĐỀ TÀI : Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác–Trường Đại học bách khoa – đại học Đà Nẵng
Tài liệu gồm 32 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao
Môn: Truyền động điện (TDD) 47 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:







Preview text:
Đồ án Truyền động điện
ĐỒ ÁN: TRUYỀN ĐỘNG ĐIỆN
TÊN ĐỀ TÀI : Thiết kế hệ thống điều khiển truyền động điện
dùng để điều khiển động cơ một chiều kích từ độc lập vận
chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác. NHÓM 3 SVTH: Nguyễn Văn Việt MSV:2050551200259 Phạm Đình Ưu MSV: 21115055120273
Đồ án Truyền động điện MỤC LỤC
MỞ ĐẦU :.......................................................................................................
CHƯƠNG 1 : PHÂN TÍCH YÊU CẦU CÔNG NGHỆ..............................
1.1 Bài toán thiết kế hệ truyền động điện....................................................
1.2 Sơ đồ nguyên lý, sơ đồ khối....................................................................
1.2.1 Sơ đồ nguyên lý.....................................................................................
1.2.2 Sơ đồ khối..............................................................................................
1.2.3 Phân tích sơ đồ.....................................................................................
1.3 Tính chọn các mạch động lực................................................................
1.3.1 Sơ đồ mạch động lực............................................................................
1.3.2 Đặc tính của tải.....................................................................................
1.3.3 Momen của động cơ.............................................................................
1.3.4 Công suất động cơ................................................................................
1.4 Tính chọn động cơ,cảm biến..................................................................
1.4.1 Tính chọn động cơ...............................................................................
1.4.2 Tính chọn cảm biến.............................................................................
1.5 Phương án truyền động.........................................................................
1.6 Sơ đồ mạch chỉnh lưu.............................................................................
1.7 Sơ đồ mạch động lực...............................................................................
Đồ án Truyền động điện MỞ ĐẦU
+Trong công cuộc xây dựng và phát triển đất nước ta đang bước vào thời kỳ công
nghiệp hoá - hiện đại hoá với những thành tựu đã đạt được cũng như những khó khan thách
thức đang đặt ra . Điều này đặt ra cho thế hệ trẻ nói chung và những kỹ sư nghành tự động hoá
nói riêng nhiệm vụ hết sức quan trọng. Đất nước đang cần một đội ngũ lao động có trí thức
cũng như lòng nhiệt huyết để phục vụ và phát triển đất nước .
+Sự phát triển nhanh chóng của cuộc cách mạng khoa học kỹ thuật nói chung và trong lĩnh
vực điện - điện tử nói riêng làm cho bộ mặt của xã hội thay đổi từng ngày. Trong hoàn cảnh đó,
để đáp ứng được những điều kiện thực tiễn của sản xuất đòi hỏi những người kĩ sư điện tương
lai phải được trang bị những kiến thức chuyên nghành một cách sâu rộng.
+ Nhóm em đã được giao đồ án truyền động điện với đề tài: “ Thiết kế hệ thống điều khiển
truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối
lượng 10kg di chuyển với tốc độ chính xác.”
Đồ án Truyền động điện
CHƯƠNG I: PHÂN TÍCH YÊU CẦU CÔNG NGHỆ
1.1 Bài toán thiết kế hệ truyền động điện.
* Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một
chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác.
+ Chiều dài băng tải 20m, chiều rộng 0,5m
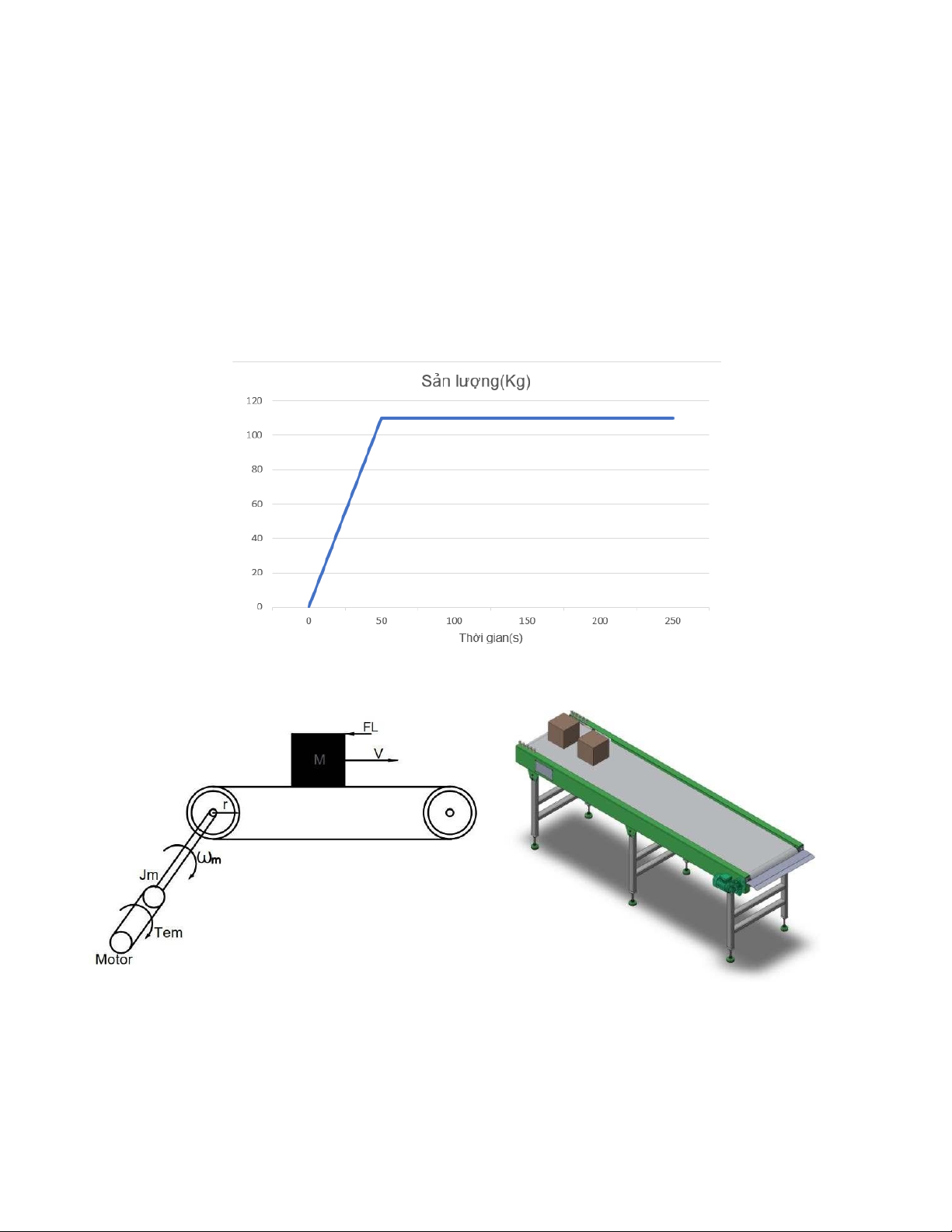
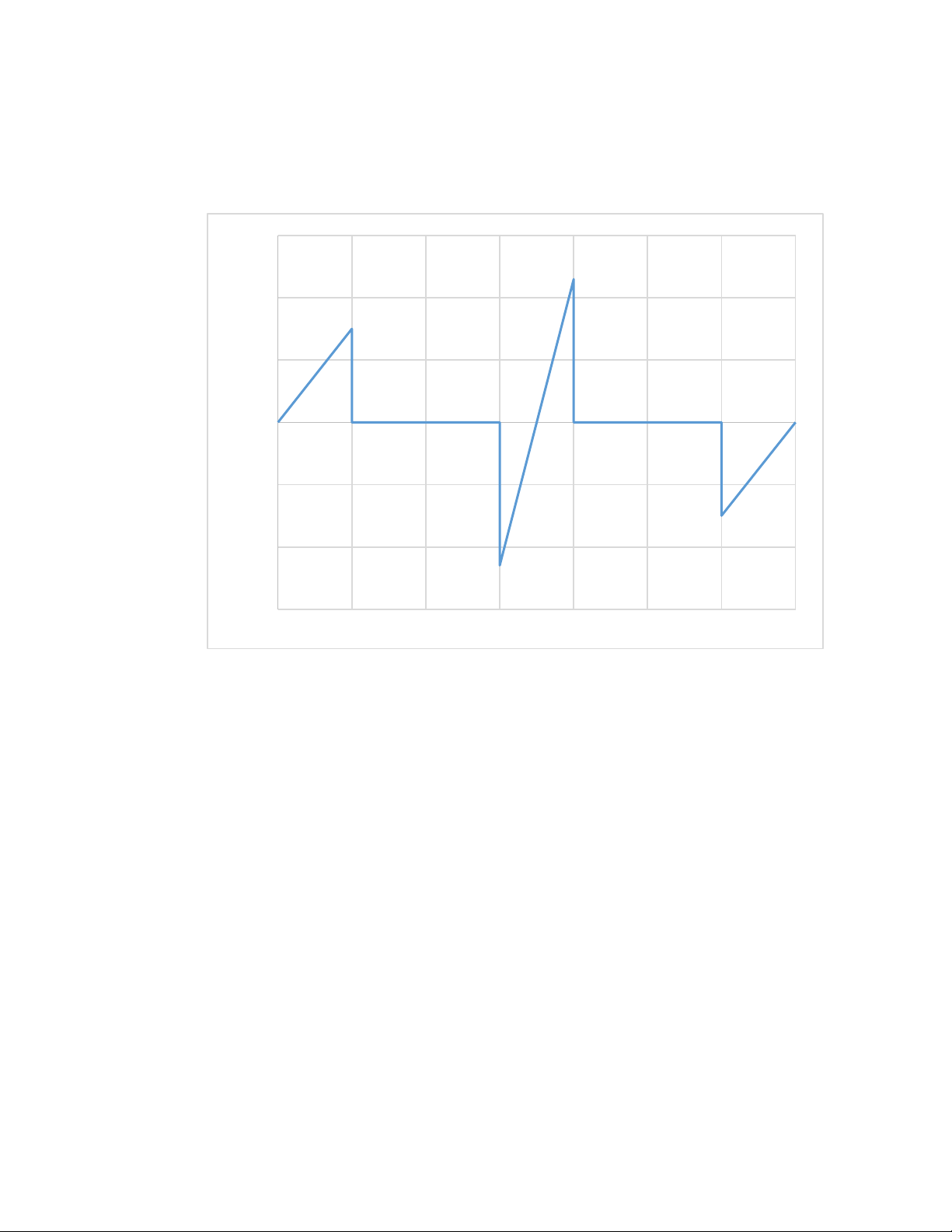
+Khối lượng bao gạo: 10Kg +Tốc độ 0,2m/s +Sản lượng 16 tấn/h Hình 1.0 Đồ thị tải
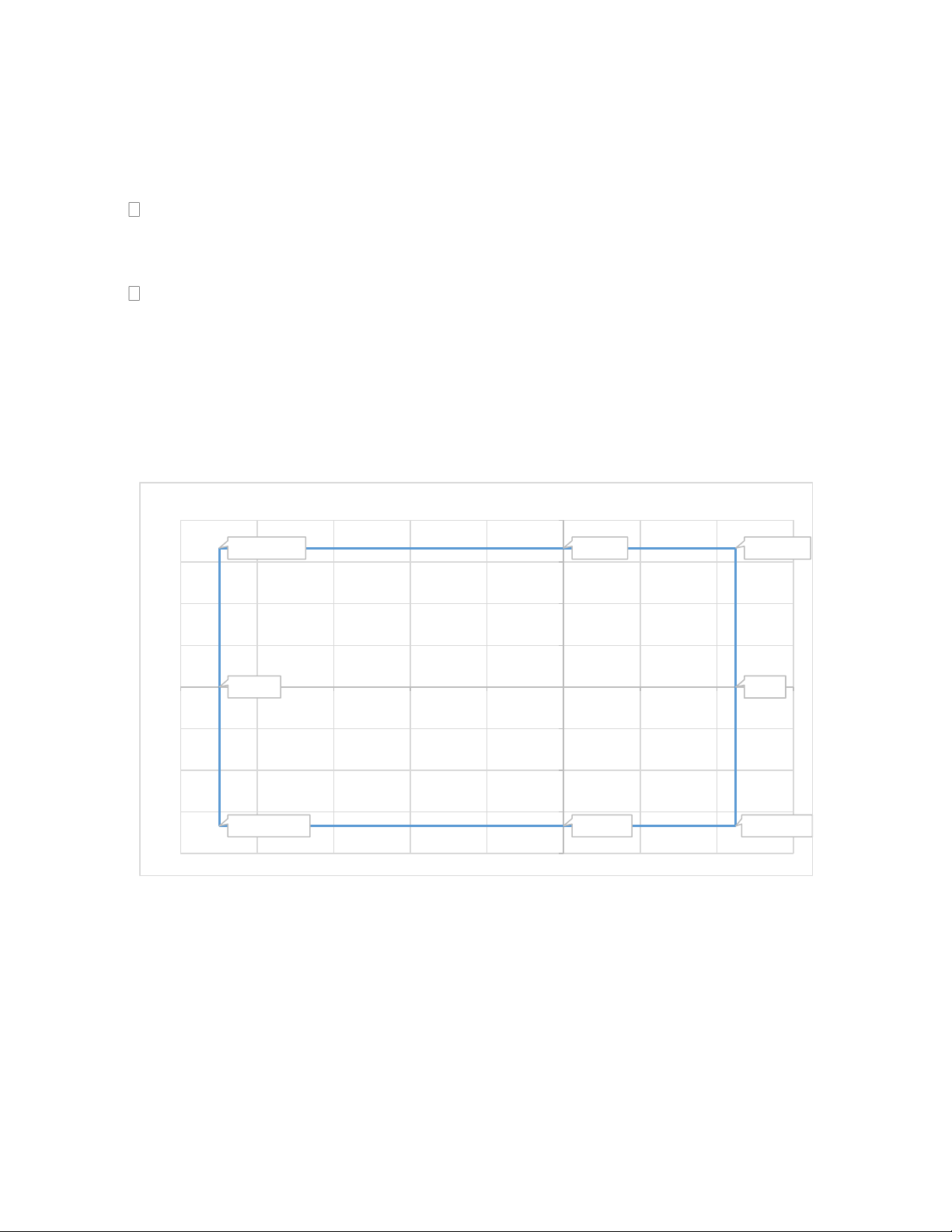
Hình 1.1 Mô hình băng tải
+ Tải có khối lượng M = 10kg + Bánh răng : r=0,006(m)
- Từ những số liệu trên, Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động
cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ 0.2m/s.
Đồ án Truyền động điện
1.2. Đặc tính của tải.|
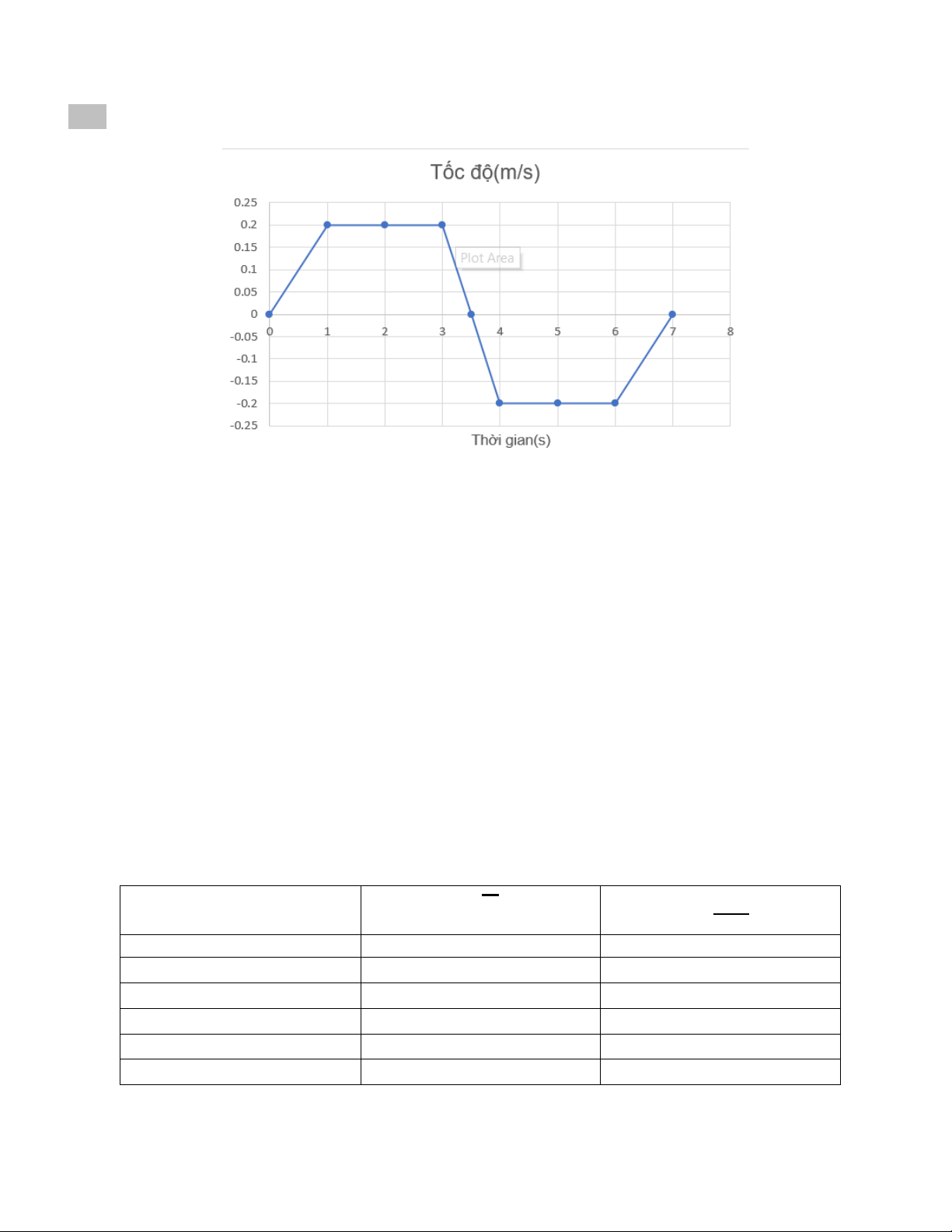
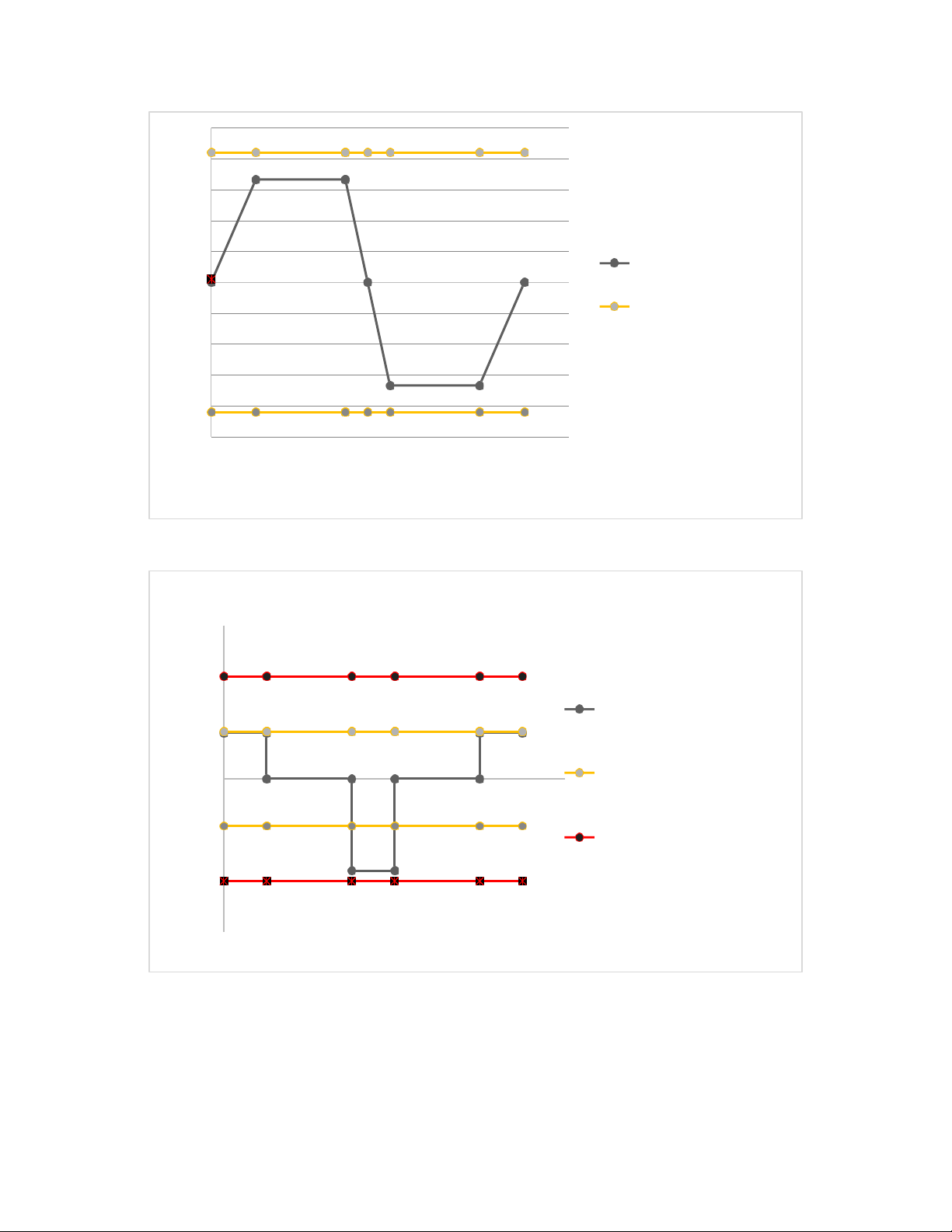
Từ đồ thị của tải, ta thấy được tải di chuyển như sau:
+ 0 → 1𝑠: tải chuyển động nhanh dần đều về phía trước từ 0 → 0.2𝑚/𝑠
+ 1 → 3𝑠: tải chuyển động đều về phía trước với vận tốc 0.2𝑚/𝑠
+ 3 → 3,5𝑠: tải chuyển động chậm dần đều về phía trước từ 0.2 → 0 𝑚/𝑠
+ 3,5 → 4𝑠: tải chuyển động nhanh dần đều và lùi về phía sau, giá trị vận tốc từ 0 → 0.2𝑚/𝑠
+ 4 → 6𝑠: vật chuyển đều lùi về phía sau với vận tốc 0.2𝑚/𝑠
+ 6 → 7𝑠: vật chuyển động chậm dần đều về phía sau, giá trị vận tốc từ 0.2→ 0𝑚/𝑠
Đầu trục động cơ được nối với rulo của băng tải. Khi đầu trục động cơ chuyển động
quay kéo theo rulo của băng chuyền quay theo, qua đó làm cho tải chuyện động tiến tới
hoặc lùi xuống. Như vậy đây là chuyển động quay biến đổi thành chuyển động tịnh tiến.
Do đó ta phải quy đổi về vận tốc góc của tải 𝑣 𝜔 = 𝑟
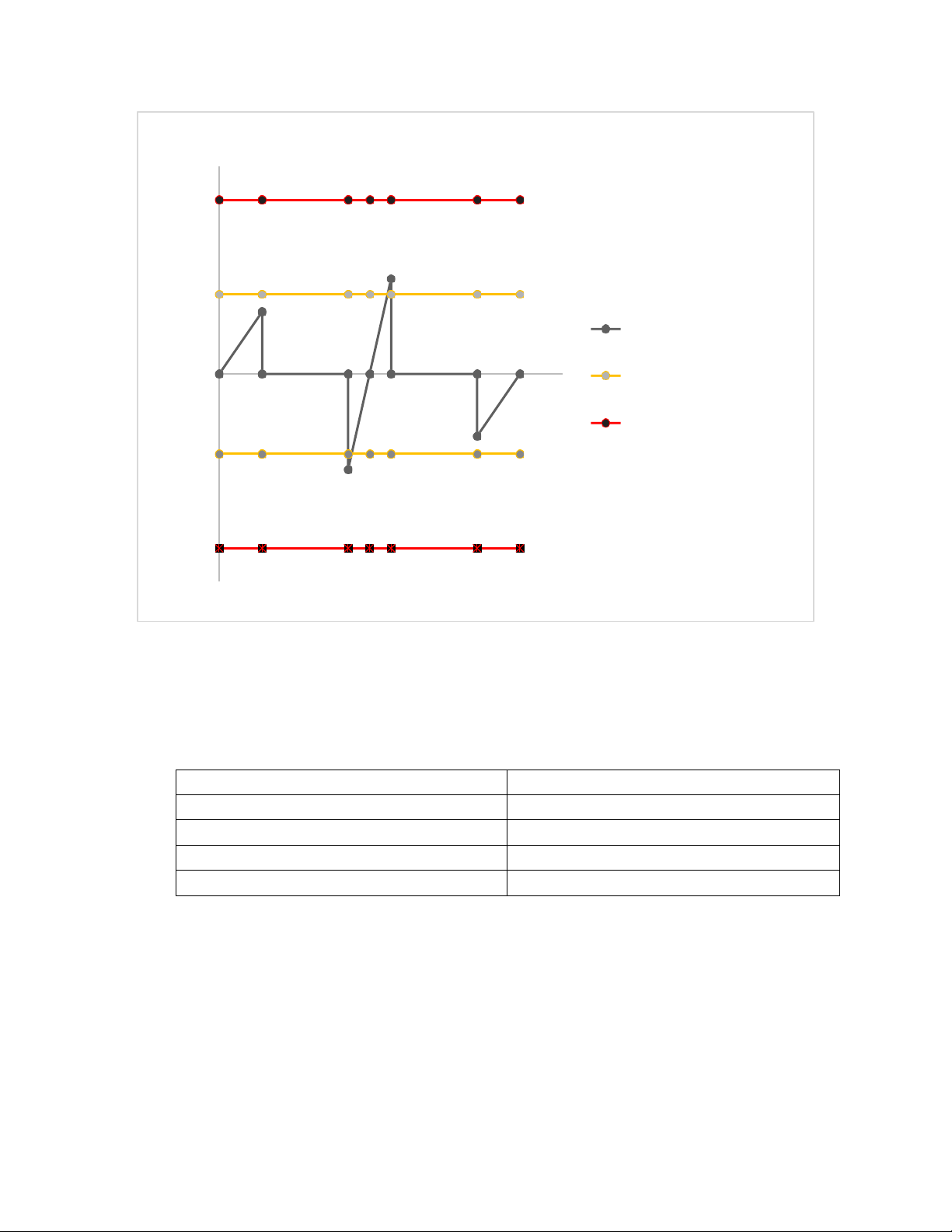
Bảng tính toán tốc độ động cơ theo thời gian 𝑚
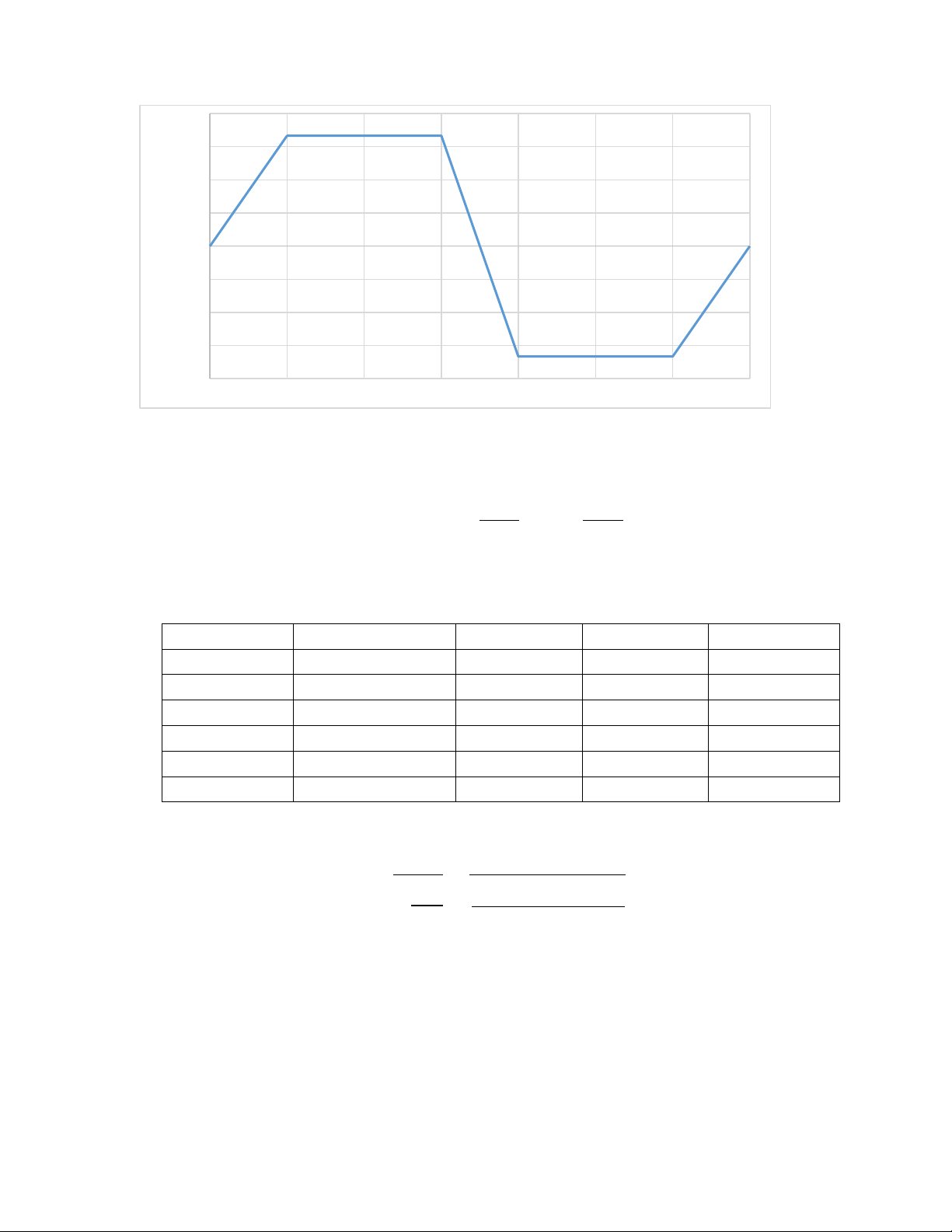
𝑡ℎờ𝑖 𝑔𝑖𝑎𝑛 𝑡 (𝑠) 𝑣 ( ) 𝑟𝑎𝑑 𝑠 𝜔 ( ) 𝑠 0 → 1 0 → 0.2 0 → 33,33 1 → 3 0.2 33,33 3 → 3,5 0.2 → 0 33,33 → 0 3,5 → 4 0 → −0.2 0 → −33,33 4 → 6 −0.2 −33,33 6 → 7 −0.2 → 0 −33,33 → 0
Đồ án Truyền động điện 40 33.33 33.33 30 ) 20 /s da (r 10 0 cơ 0 0 g 0 n 0 1 2 3 4 5 6 7 độ -10 độ tốc -20 -33.33 -33.33 -30 -40 thời gian (s)
Hình 1.7 Đồ thị tốc độ động cơ theo thời gian
1.2.1. Momen của động cơ
Momne cần thiết cho động cơ: ⅆ ω ⅆ ω
T =T +T =J .
m + M . r2 . m em m m dt ⅆ t
Trong đó 𝐽𝑚 là momen quán tính của động cơ. Và trong khi tính toán ta chọn
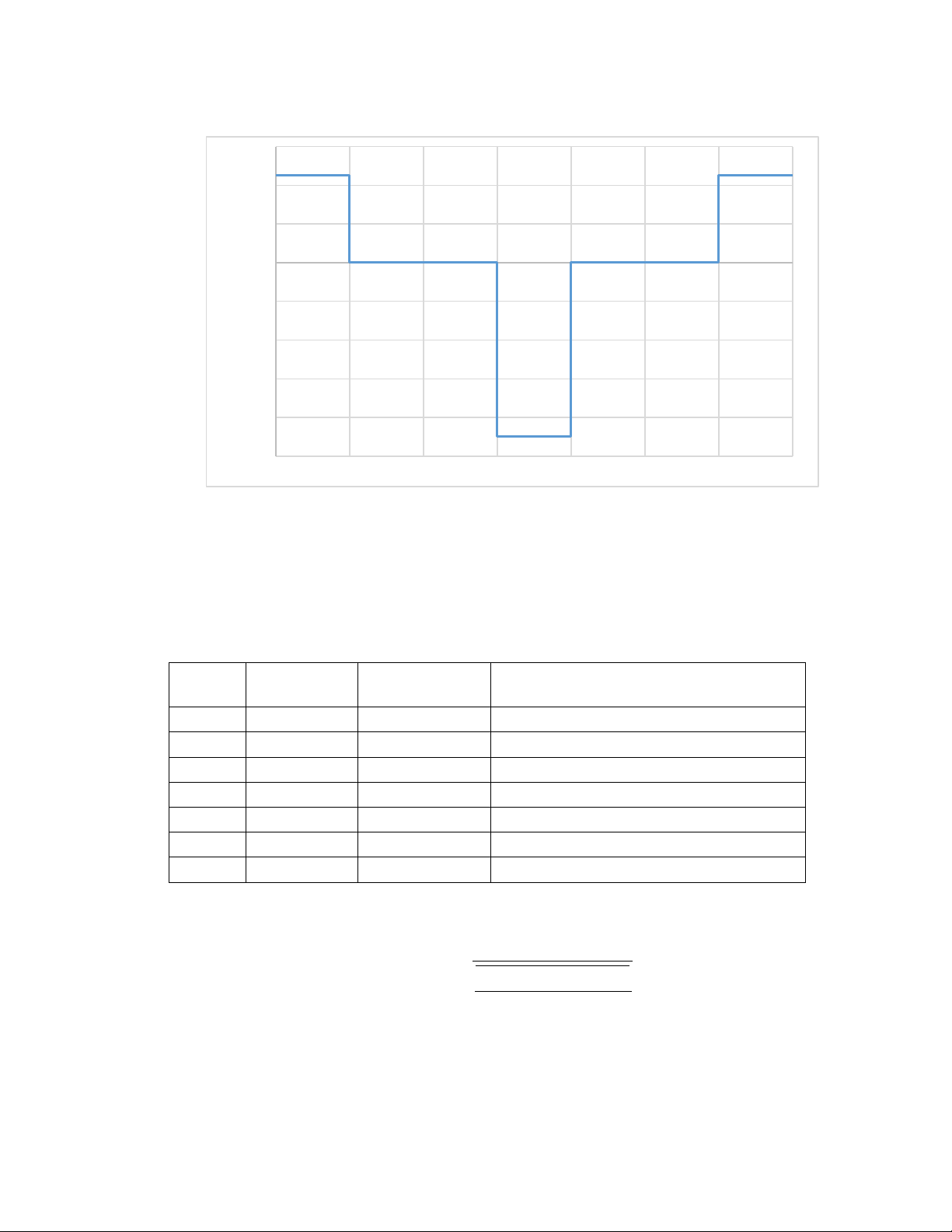
giá trị hệ số này là : 𝐽𝑚 = 0 𝑘𝑔𝑚2 Thời gian (s) Tốc độ (rad/s) ∆𝑡 ∆𝜔 𝑇𝑒𝑚(𝑁. 𝑚) 0 → 1 0 → 33,33 1 33,33 4,5 1 → 3 33,33 2 0 0 3 → 3,5 33,33 → 0 0,5 -33,33 - 8,99 3,5 → 4 0 → −33.33 0,5 -33,33 - 8,99 4 → 6 −33,33 2 0 0 6 → 7 −33,33 → 0 1 33,33 4,5 Momen đẳng trị:
+…+T 2t T = ∑ i i 1 1 2 5 = 2 5 dt
√ T2 t t t +t +…+ t i
√T2 t +T 2t 1 2 5 =4,16(N.m) Momen cực đại
T =8,99 (N . m ) max
Đồ án Truyền động điện 6 4.5 4.5 4.5 4.5 4 2 0 0 0 0 0 0 1 2 3 4 5 6 7 -2 -4 -6 -8-8.99-8.99 -10 thời gian (s)
Hình 1 Đồ thị momen động cơ theo thời gian
1.2.2 Công suất của động cơ
Công suất của động cơ được tính theo công thức
𝑃𝑒𝑚 = 𝑇𝑒𝑚 × 𝜔𝑀 t(s) 𝜔𝑚(rad/s) 𝑇𝑒𝑚(N.m)
𝑃𝑒𝑚 = 𝑇𝑒𝑚 × 𝜔𝑀 0 0 4,5 0 1 33,33 4,5 149,9 3 33,33 -8,99 -229,6 3,5 0 -8,99 0 4 -33,33 -8,99 220,6 6 -33,33 4,5 -149,9 7 0 4,5 0
Công suất đẳng trị của động cơ: 0 0 1 1 5 Pⅆt= 5
√P2t + P2t +⋯+ P2t
t +t +…+t o 1 5 =69(W)
Công suất cực đại của động cơ:
Đồ án Truyền động điện P =229,6 ( W ) max 300 229.6 200 149.9 100 0 0 000 0 0 0 0 1 2 3 4 5 6 7 -100 -149.9 -200 -229.6 -300 Thời gian
Hình 1. Đồ thị công suất của động cơ
Đồ án Truyền động điện
1.3 Sơ đồ nguyên lý, sơ đồ khối.
1.3.1 Sơ đồ nguyên lý
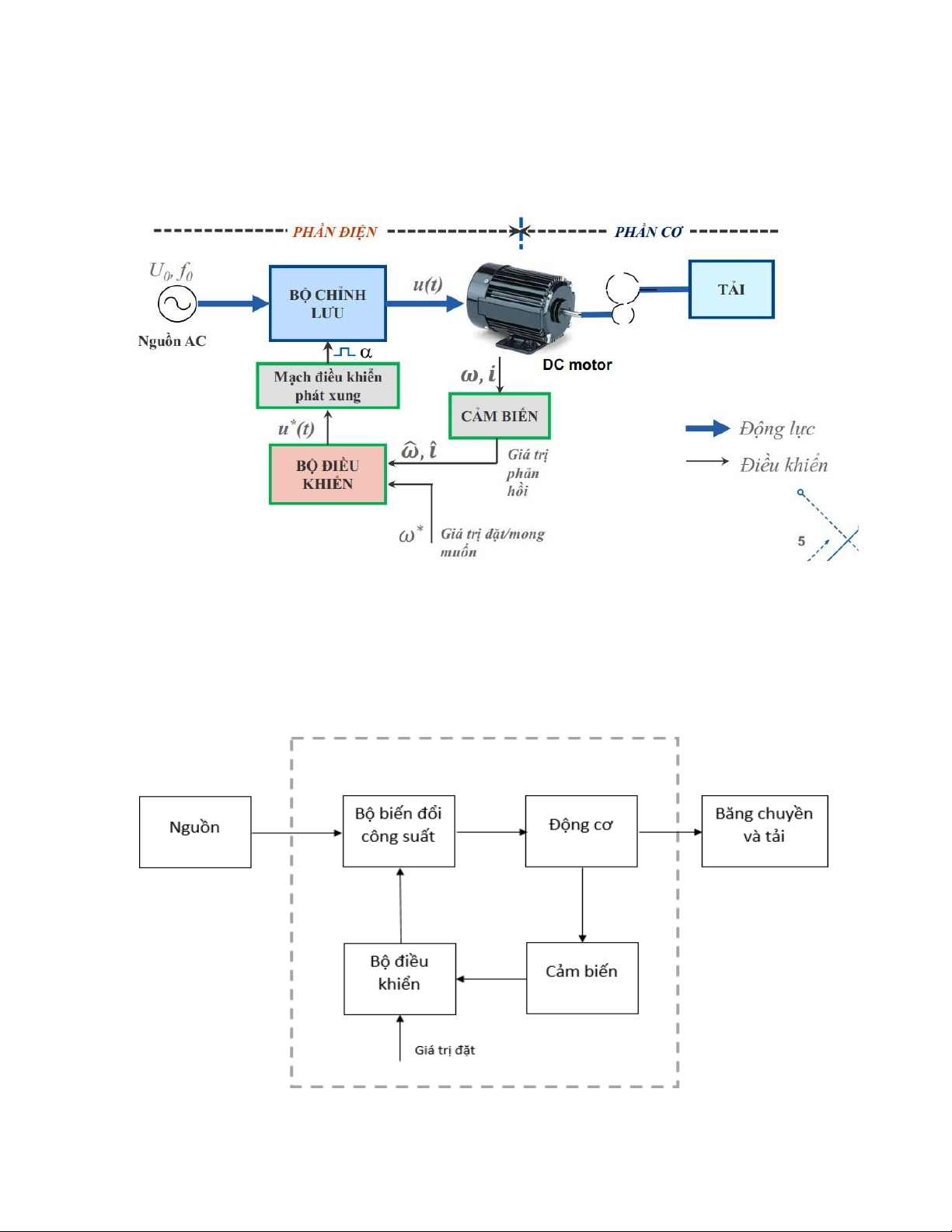
Hình 1.3 Sơ đồ nguyên lý
1.1.2: Sơ đồ khối
Hình 1.4 Sơ đồ khối
Đồ án Truyền động điện
Hệ truyền động bao gồm:
+ Băng chuyền và tải như đã cho
- Bộ biến đổi công suất: biến đổi nguồn điện xoay chiều thành nguồn 1 chiều
và có thể thay đổi được giá trị điện áp để cung cấp cho động cơ
- Động cơ một chiều kích từ độc lập
- Cảm biến : đo các giá trị của động cơ ( tốc độ, dòng điện, …)
- Bộ điều khiển : nhận các giá trị của cảm biến và giá trị đặt từ đó tính toán
và cho ra tín hiệu điều khiển dưới dạng xung rồi đưa đến bộ biến đổi công suất
Hệ thống là một hệ kín, hoạt động một các tự động. Sau khi nạp vào giá trị tốc
độ đặt ( giá trị tốc độ mong muốn), bộ điều khiển sẽ nhận các giá trị thực từ
cảm biến và tiến hành tính toán cho ra tín hiệu điều khiển. Tín hiệu điều khiển
dưới dạng xung sẽ tác động vào các van của bộ biến đổi công suất, từ đó bộ
biến đổi công suất cho ra điện áp thực sao cho các giá trị đầu ra của động cơ cụ
thể là giá trị tốc độ bằng với giá trị đặt.
1.2.3 Phân tích sơ đồ
Để thiết kế một hệ điều khiển truyền động điện đáp ứng được các yêu cầu, đảm
bảo về chất lượng, độ chính xác, mức độ tự động cao thì chúng ta cần phải quan
tâm đến 2 phần : phần mạch động lực và phần điều khiển. Trong đó phần điều
khiển sẽ quyết định phần lớn đến chất lượng điều khiển và mức độ tự động của hệ
thống điều khiển . Và mục tiêu hướng đến của đồ án này là thiết kế bộ điều khiển
cho hệ truyện động điện. Bộ điều khiển thường sẽ là các vi xử lí vi điều khiển, máy tính,
… và đã có sẵn. Thiết kế bộ điều khiển ở đây nghĩa là thiết kế cấu trúc điều khiển,
tìm ra thuật toán điều khiển và lựa chọn tham số bộ điều khiển
Bên cạnh thiết kế bộ điều khiển thì thiết kế phần mạch động lực cũng rất quan
trọng. Hệ truyền động điện có hoạt động tốt, đáp ứng được yêu cầu, chất lượng
hay không cũng phụ thuộc vào mạch động lực. Và trong chương I này tiến hành
xây dựng, tính toán, hoàn thiện mạch động lực.
Đồ án Truyền động điện
1.3 Tính chọn các mạch động lực
1.3.1 Sơ đồ mạch động lực
Hình 1.5: Sơ đồ chung mạch động lực
Mạch động lực bao gồm các phần:
- Bộ biến đổi công suất
- Động cơ 1 chiều kích từ độc lập - Càm biến
Với yêu cầu ban đầu là nguồn xoay chiều 3 pha 220V/380V, trong khi động
cơ lại là 1 chiều kích từ độc lập. Do đó bộ biến đổi công suất là bộ chỉnh lưu.
Để có thể điều khiển động cơ sao cho tải di chuyển chính xác, cũng như để
đảm bảo chất lượng của hệ truyền động, đảm bảo mức độ tự động cao của hệ thì
đòi hỏi mạch phần cứng cũng phải đáp ứng được yêu cầu tốt nhất. Do đó trong đồ
án này, đối với động cơ ta sẽ sử dụng động cơ sevor.
Để có thể điều khiển được tải di chuyển theo đồ thị yêu cầu thì chúng ta phải
điều khiển được tốc độ của động cơ. Để điều khiển được tốc độ của động cơ thì
phải điều khiển được momen trên trục động cơ, mà momen lại có quan hệ tỉ lệ với
dòng điện. Do đó các cảm biến cần dùng trong hệ này là cảm biến dòng điện và cảm biến tốc độ.
Đồ án Truyền động điện
1.4. Tính chọn đông cơ, cảm biến
1.4.1. Tính chọn động cơ
Chọn hệ số dự trữ 1,4. Các thông số tính toán của động cơ lúc này là : 𝐾 = 1 𝐾 = 1,4 Momen cực đại 8,99 12,59 Momen đẳng trị 4,16 5,82 Công suất cực đại 229,6 312,44 Công suất đẳng trị 69 96,6
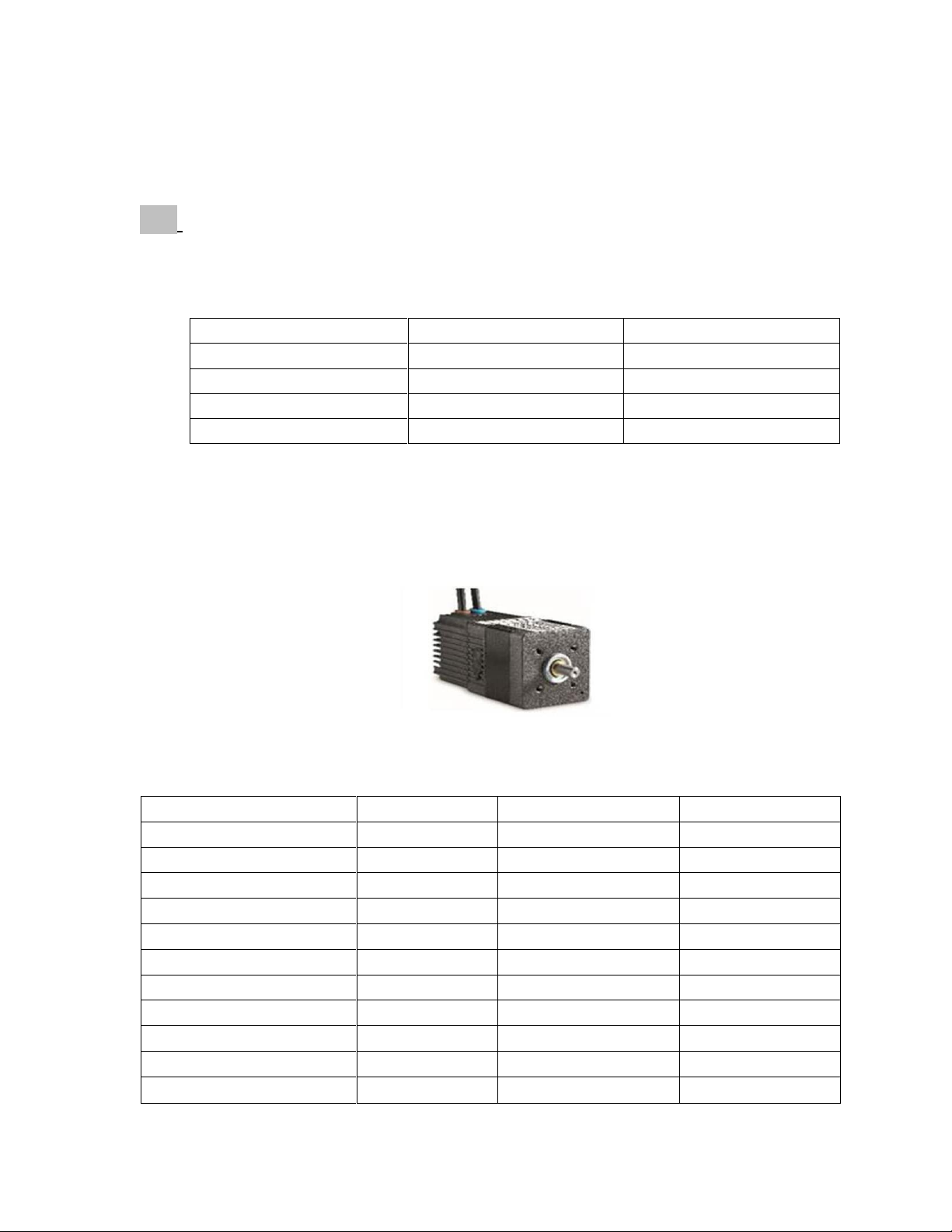
Ta lựa chọn động cơ 80280 SMI21 với các thông số sau:
Hình 1.9: Động cơ SMI21 80280 Kí hiệu Đơn vị Thông số Công suất định mức 𝑃đ𝑚 W 192 Công suất cực đại 𝑃𝑚𝑎𝑥 W 419 Momen định mức 𝑇đ𝑚 Nm 0,46 Momen cực đại 𝑇𝑚𝑎𝑥 Nm 1 Tốc độ định mức 𝜔đ𝑚 Rad/s 420 Dòng điện định mức 𝐼đ𝑚 A 5 Dòng điện cực đại 𝐼𝑚𝑎𝑥 A 11,4 Điên áp 𝑈 V 48 Điện trở 𝑅𝑎 Ω 0,6 Điện cảm 𝐿𝑎 H 0,012 Momen quán tính J kgm2 0,128
Đồ án Truyền động điện
Do yêu cầu của tải với momen lớn hơn momen của động cơ, và để giảm tốc độ
của động cơ thì ta sử dụng thêm hộp số Tỷ số truyền: ω 42 mot or 0 = 12,5 (1.7) ωM = 33,33
Momen trên đầu trục động cơ sau khi thêm hộp số ω
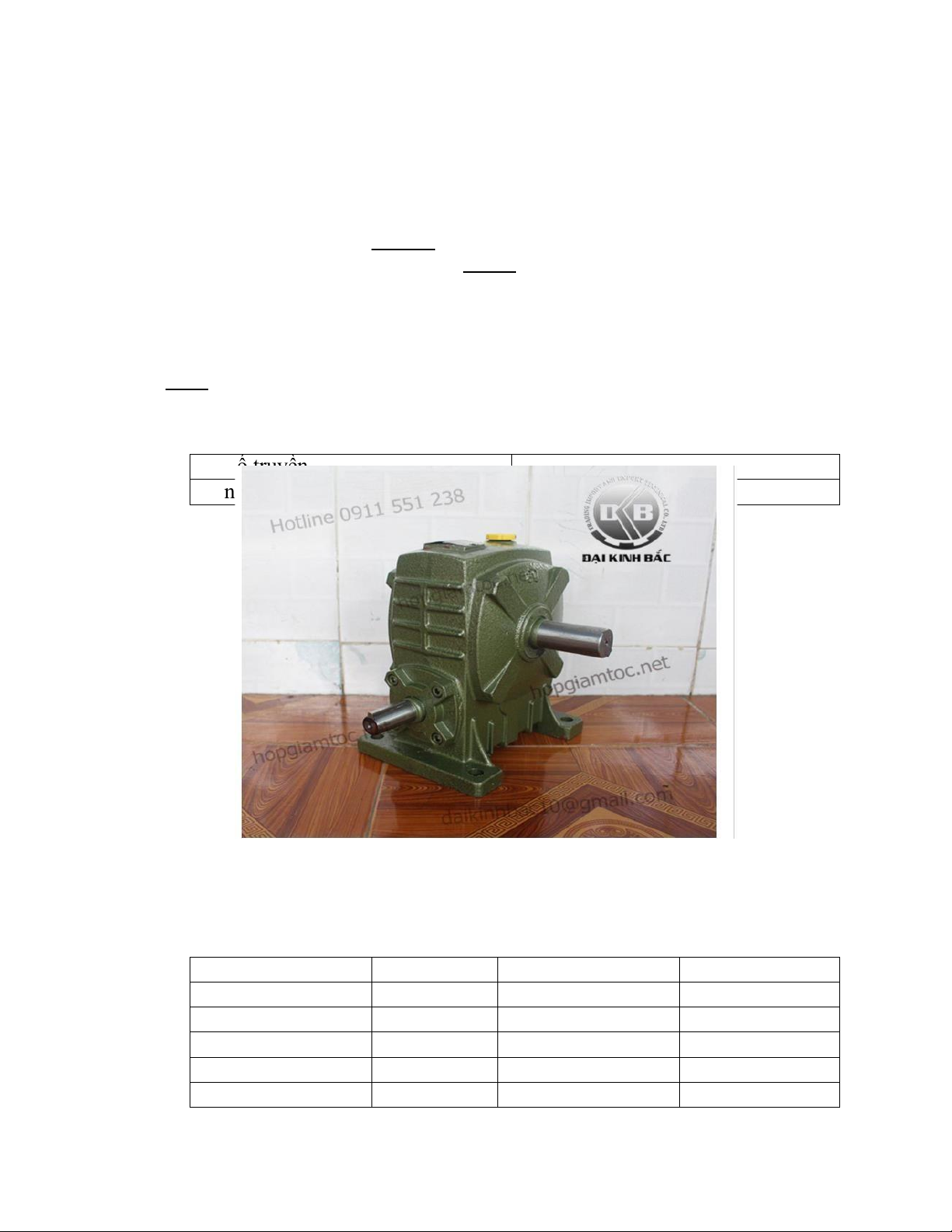
T '=T × motor =0,46 ×12,5=5,75 NmTa lựa chọn hộp số WPA size em ω M
40 với các thông số sau: Tỷ ố s truyền 10;20;30;40 Côn g suất đầu vào 250W
Hình 1.10: Hộp số WPA size 40
Kiểm tra lại sau khi lắp hộp số Đơn vị
Sau khi lắp hộp số Tính toán Tốc độ định mức Rad/s 42 29,54 Momen định mức Nm 4,6 4,16 Công suất W 200 96,6 Momen cực đại Nm 10 8,99 Tốc độ cực đại Rad/s 42 33,33
Đồ án Truyền động điện 50 40 30 s/) 20 dar( 10 cơ tốc độ động cơ g n 0 ộ đ 0 2 4 6 8
tốc độ định mức động a -10 củ cơ c tố -20 -30 -40 -50 Thời gian (s)
Đồ thị tốc độ động cơ
Hình 1.11: Đồ thị so sánh tốc độ động cơ 15 10 ) m. momen động cơ N( 5 cơ g nộ
momen định mức động cơ đ 0 a ủ 02468 c en -5 mo Momen cực đại m -10 Thời gian (s) -15 Đồ thị momen động cơ
Hình 1.12: Đồ thị so sánh momen động cơ
Đồ án Truyền động điện
Đồ thị công suất động cơ 500 400 300 ) 200 (W cơ Công suất động cơ 100 g n ộđa 0
Công suất định mức của củ 0 2 4 6 8 động cơ ấtus -100 Công suất cực đại g nô C -200 -300 -400 -500 Thời gian (s)
Hình 1.13: Đồ thị so sánh công suất động cơ
1.4.2 Tính chon cảm biến - Cảm biến tốc độ
Chọn encoder omrom E6B2 CWZ6C.Với thông số kĩ thuật : Điện áp sử dụng 5~24V Dòng tiêu thụ 80mA Số xung
1000 xung / 1 vòng (1000 p/r)
Tần số đáp ứng tối đa 100Khz Mô men quán tính 0,6 (𝑔𝑐𝑚2)
Đồ án Truyền động điện
Hình 1.14: encoder omrom E6B2 CWZ6C - Cảm biến dòng
Ta chọn loại cảm biến dòng HC-U050V4B15 với các thông số sau: Dòng cực đại 50A Dòng bão hòa 150A Nguồn cung cấp 15V Nhiệt độ hoạt động −10~80℃
Hình 1.15: Cảm biến dòng HC-U050V4B15
Đồ án Truyền động điện
1.5 Phương án truyền động
Dựa vào đồ thị tốc độ của động cơ và đồ thị momen của động cơ. Ta có thể
xác định được điểm làm việc của động cơ. Và từ đó đưa ra phương án truyền động
Trong khoảng thời gian từ 0 → 7𝑠
+ 0 → 1𝑠 : 𝜔𝑚 > 0; 𝑇𝑒𝑚 > 0 . Động cơ hoạt động ở góc phần tư thứ I
+ 1 → 3𝑠 : 𝜔𝑚 > 0; 𝑇𝑒𝑚 = 0 .
+ 3 → 3,5𝑠 : 𝜔𝑚 > 0; 𝑇𝑒𝑚 < 0 . Động cơ hoạt động ở góc phần tư thứ II
+ 3,5 → 4𝑠 : 𝜔𝑚 < 0; 𝑇𝑒𝑚 < 0 . Động cơ hoạt động ở góc phần tư thứ III
+ 4 → 6𝑠 : 𝜔𝑚 < 0; 𝑇𝑒𝑚 = 0 .
+ 6 → 7𝑠 : 𝜔𝑚 < 0; 𝑇𝑒𝑚 > 0 . Động cơ hoạt động ở góc phần tư thứ IV w(rad/s) 40 -8.99, 33.33 0, 33.33 4.5, 33.33 30 20 10 ) .m N( -8.99, 0 0 4.5, 0 -10 M -8 -6 -4 -2 0 2 4 6 -10 -20 -30 -8.99, -33.33 0, -33.33 4.5, -33.33 -40
Hình 1.16: Đồ thị đặc tính làm việc của động cơ
- Nhận xét: Như vậy động cơ làm việc ở cả 4 góc phần tư, có đảo chiều quay của động cơ - Các phương án
Phương án 1: Điều khiển điện áp phần ứng
Phuơng án 2: Điều khiển điện áp phần ứng và từ thông kích từ
- Ta sẽ sử dụng phương pháp điều khiển điện áp phần ứng vì:
Đồ án Truyền động điện
Tốc độ điều khiển không vượt quá tốc độ định mức. ( dựa vào đồ thị tốc độ của động cơ).
Điều chỉnh tốc độ liên tục.
Có thể điều khiển được động cơ hoạt động được cả 4 góc phần tư bằng
cách sử dụng thêm 2 bộ chỉnh lưu mắc song song ngược.
Với việc sử dụng duy nhất phương pháp 1 thay vì phương pháp 2 sẽ
giảm tính phức tạp ở mạch động lực và ở phần thiết kế thuật toán điều khiển.
+ Đây là phương pháp dễ dàng điều khiển, tối ưu, đơn giản, hiệu quả.
Đồ án Truyền động điện
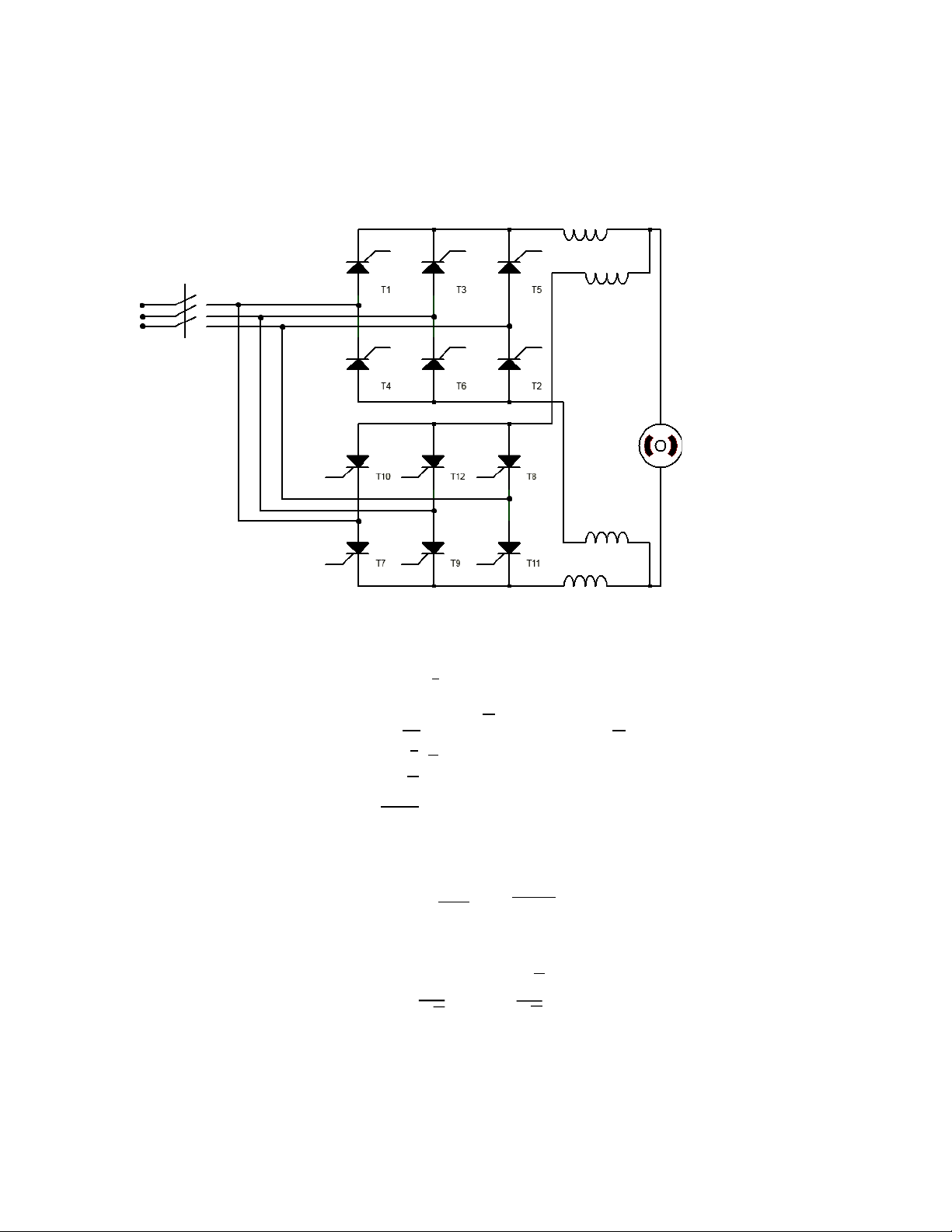
1.6 Sơ đồ mạch chỉnh lưu
Do yêu cầu có đảo chiều động cơ và sử dụng phương pháp điều khiển điện áp
phần ứng. Cho nên ta sử dụng 2 bộ chỉnh lưu cầu 3 pha mắc ngược nhau
Hình 1.17: Sơ đồ mạch chỉnh lưu
Giá trị trung bình của điện áp chỉnh lưu 𝜋 2+𝛼 1 𝜋 𝑉
𝑑𝛼 = 3𝜋 ∫ √6 . 𝑉 ) 𝑑𝜃 (1.9) 𝜋 𝑠. sin (𝜃 + 6 +𝛼 6 3√6 =
. 𝑉𝑠. 𝑐𝑜𝑠𝛼 = 2,34. 𝑉𝑠. 𝑐𝑜𝑠𝛼 𝜋
Điện áp ngược đặt lên van 𝑉 (1.10)
𝑛𝑔 𝑚𝑎𝑥 = √6 V = s √6.220= 539 (𝑉)
Dòng điện làm việc của van 1 𝐼 = . 𝐼 √31 𝐴) (1.11) 𝑙𝑣 = đ𝑚 . 5 = 2,9 ( √3
Đồ án Truyền động điện
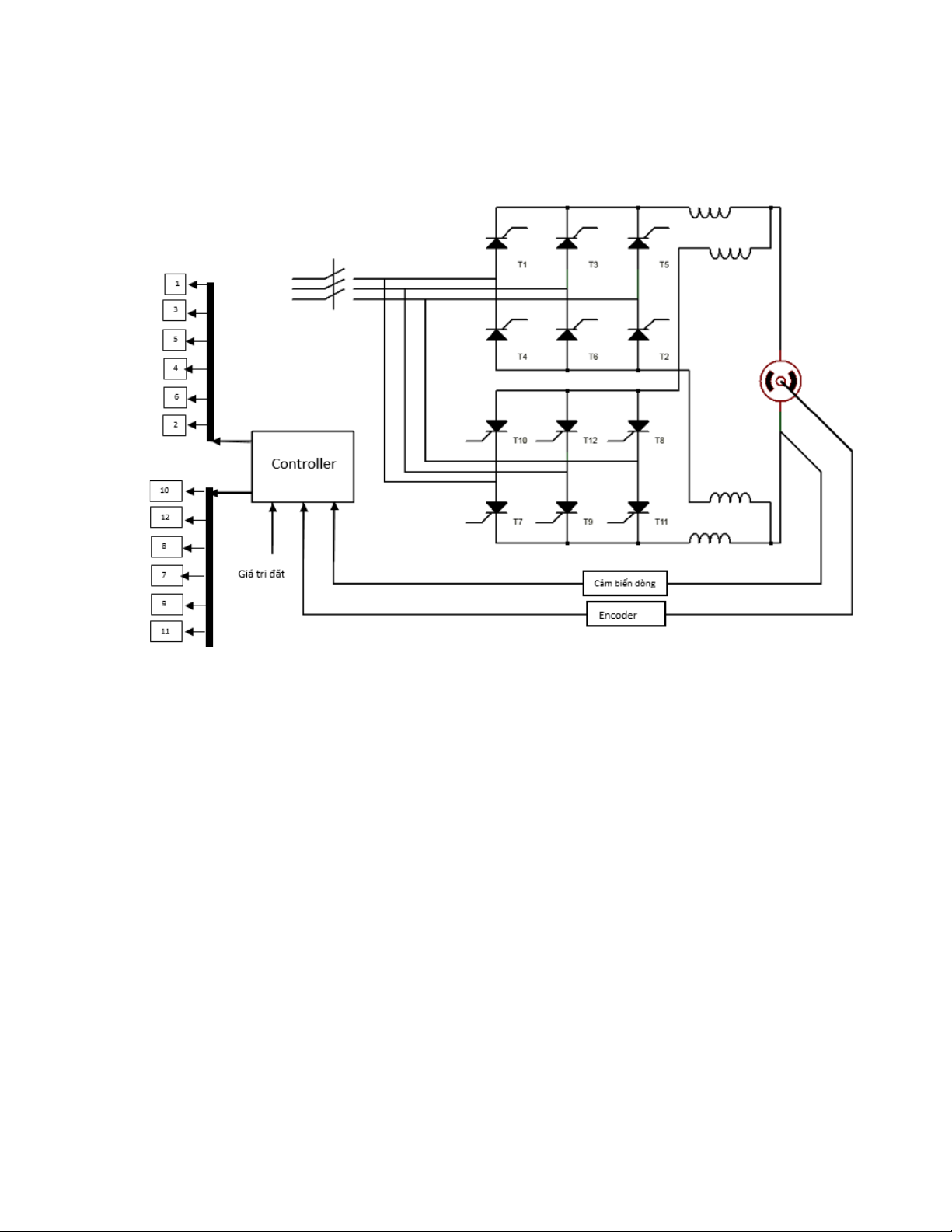
1.7 Sơ đồ mạch động lực
Hình 1.18: Sơ đồ cụ thể mạch động lực
Xác định tham số của hệ thống
- Tham số của động cơ : + Điện trở : 𝑅𝑎 = 0,6 Ω + Điện cảm : 𝐿𝑎 = 0,012 𝐻
+ Momen quán tính: 𝐽 = 0,128 𝑘𝑔𝑚2 - Bộ chỉnh lưu
+ Điện cảm cuộn dây : 𝐿 = 1,2 𝑚𝐻
Tài liệu liên quan:
-
Bài tập Chương 2 môn Truyền động điện | Trường Đại học Bách khoa, Đại học Đà Nẵng
29 15 -
BÁO CÁO CUỐI KỲ HỌC PHẦN: ĐIỀU KHIỂN TRUYỀN ĐỘNG ĐIỆN TRONG CÔNG NGHIỆP - môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
69 35 -

Đề thi môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
62 31 -

Tổng hợp câu hỏi ôn tập phần điện trong nhà máy điện- môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
63 32