Hướng dẫn và báo cáo thí nghiệm Môn Thiết kế hệ thống cơ điện tử | Đại học Bách Khoa Hà Nội
Hướng dẫn và báo cáo thí nghiệm Môn Thiết kế hệ thống cơ điện tử. Tài liệu được sưu tầm gồm 48 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: Thiết kế hệ thống cơ điện tử 13 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.8 K tài liệu
Tác giả:










Preview text:
lOMoAR cPSD| 61601590
TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ N ỘI VIỆN CƠ KHÍ BỘ MÔN CƠ ĐIỆN TỬ
TÀI LIỆU HƯỚNG DẪN & BÁO CÁO THỰC HÀNH - THÍ NGHIỆM
Môn học: THIẾT KẾ HỆ THỐNG CƠ ĐIỆN TỬ (ME5511) Họ và tên sinh viên: Mã số SV: Lớp: Khóa: lOMoAR cPSD| 61601590 Hà Nội, 2021
Tài liệu hướng dẫn thí nghiệm trình bày chi tiết các khái niệm cơ bản, thảo luận, thực hành,
các bài tập, các câu hỏi ôn tập, kiểm tra, và các bước tiến hành thực hành - thí nghiệm thông qua
việc sử dụng hệ thống đào thực hành thiết kế Hệ thống cơ điện tử. Các bài thực hành - thí nghiệm
cung cấp cho sinh viên kiến thức và kỹ năng vững chắc và hiểu về thiết kế Hệ thống cơ điện tử,
lập trình điều khiển cho Hệ thống cơ điện tử, đánh giá Hệ thống cơ điện tử.
Sinh viên cần chấp hành nghiêm túc các quy định về an toàn điện, nội quy phòng thí nghiệm
và hướng dẫn của cán bộ phụ trách trong suốt quá trình làm thí nghiệm tại phòng Lab. Sinh viên
được yêu cầu xem lại và nắm vững phần lý thuyết cơ bản và hoàn thành các câu hỏi kiểm tra trước
khi thực hiện thí nghiệm; thực hiện đầy đủ và tuân thủ các bước tiến hành thí nghiệm theo hướng
dẫn, ghi lại đầy đủ các kết quả thực nghiệm; trả lời đầy đủ các câu hỏi ôn tập/ yêu cầu công nghệ sau khi làm thực nghiệm. lOMoAR cPSD| 61601590
THÔNG TIN CHUNG VỀ CÁC BÀI THỰC HÀNH THÍ NGHIỆM
Tên học phần: Thiết kế hệ thống Cơ điện tử Mã học phần: ME5511
Cấu trúc học phần: 2(2-0-1-4)
Khối lượng thực hành – thí nghiệm: 1 tín chỉ (15 tiết/học kỳ)
Số lượng bài thực hành – thí nghiệm: 5 bài TT Nội dung
Chuẩn đầu Bài đánh giá Thời Địa điểm ra HP lượng Bài 1
Xây dựng Hệ thống cơ M1, M2 3 tiết điện tử, điều khiển chuyển động cho Hệ thống Bài 2
Lập trình quỹ đạo cho hệ M2, M3 3 tiết thống thực hiện nhiệm vụ công nghệ Bài 3
Lập trình xử lý tín hiệu M2, M3 3 tiết
cho Hệ thống Cơ điện tử Bài 4
Lập trình cho hệ thống M3 3 tiết
sử dụng bộ điều khiển tỷ lệ Bài 5
Lập trình cho hệ thống M3 3 tiết
sử dụng bộ điều khiển PID
Bài 1. Xây dựng Hệ thống cơ điện tử, điều khiển chuyển động cho Hệ thống 1. Mục tiêu chung
- Xây dựng được Hệ thống Cơ điện tử - Robot tự hành kiểu bánh xe/Hệ thông phân loại…
- Lập trình điều khiển được hệ thống bằng ngôn ngữ FBD(Function block diagram)/Matlab/C, C++, C#…
- Sử dụng thành thạo phần mềm Mindstorm EV3/Matlab/Visual Studio… để lập trình điều khiển
hệ thống Cơ điện tử:
2. Từ và thuật ngữ mới
- Brick Status: Khối điều chỉnh cho màn hình Brick.
- Action Blocks: Các khối di chuyển, điều khiển động cơ, hiển thị, ...
- Flow Blocks: Các khối bắt đầum di chuyển, vòng lặp, ... lOMoAR cPSD| 61601590
- Sensor Blocks: Các khối cảm biến
- Data Operations: Các khối biến, logic, toán học, so sánh, ...
3. Trang thiết bị, dụng cụ, học liệu cần thiết - Máy tính.
- Phần mềm Mindstorm EV3/Matlab/Visual Studio…
- Mô hình cơ điện tử - Robot tự hành kiểu bánh xe/Hệ thông phân loại… xây dựng từ các
linh kiện trong phòng thí nghiệm.
4. Nội dung thực hành/ thí nghiệm
4.1 Xây dựng Hệ thống Cơ điện tử
4.1.1. Mục đích
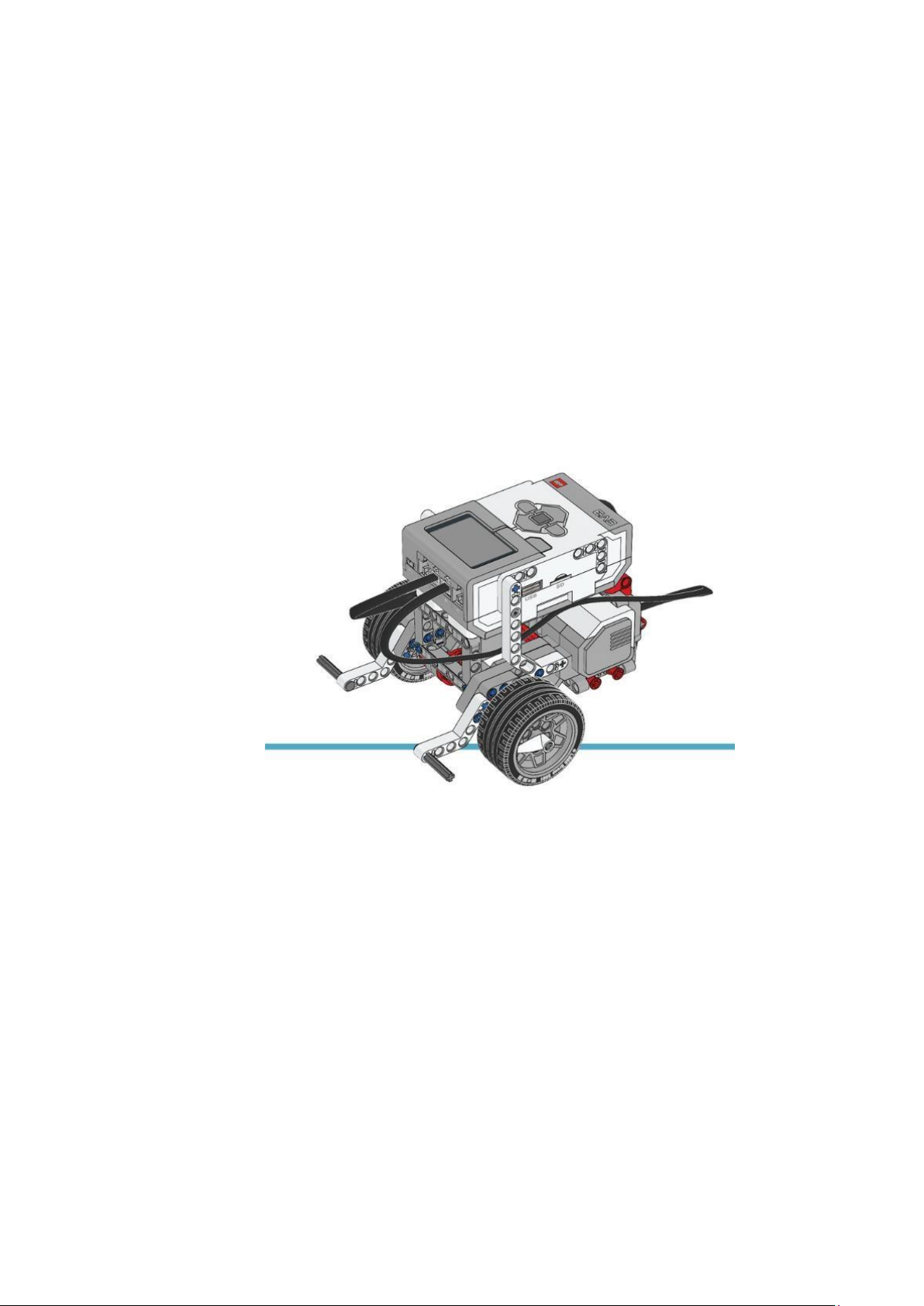
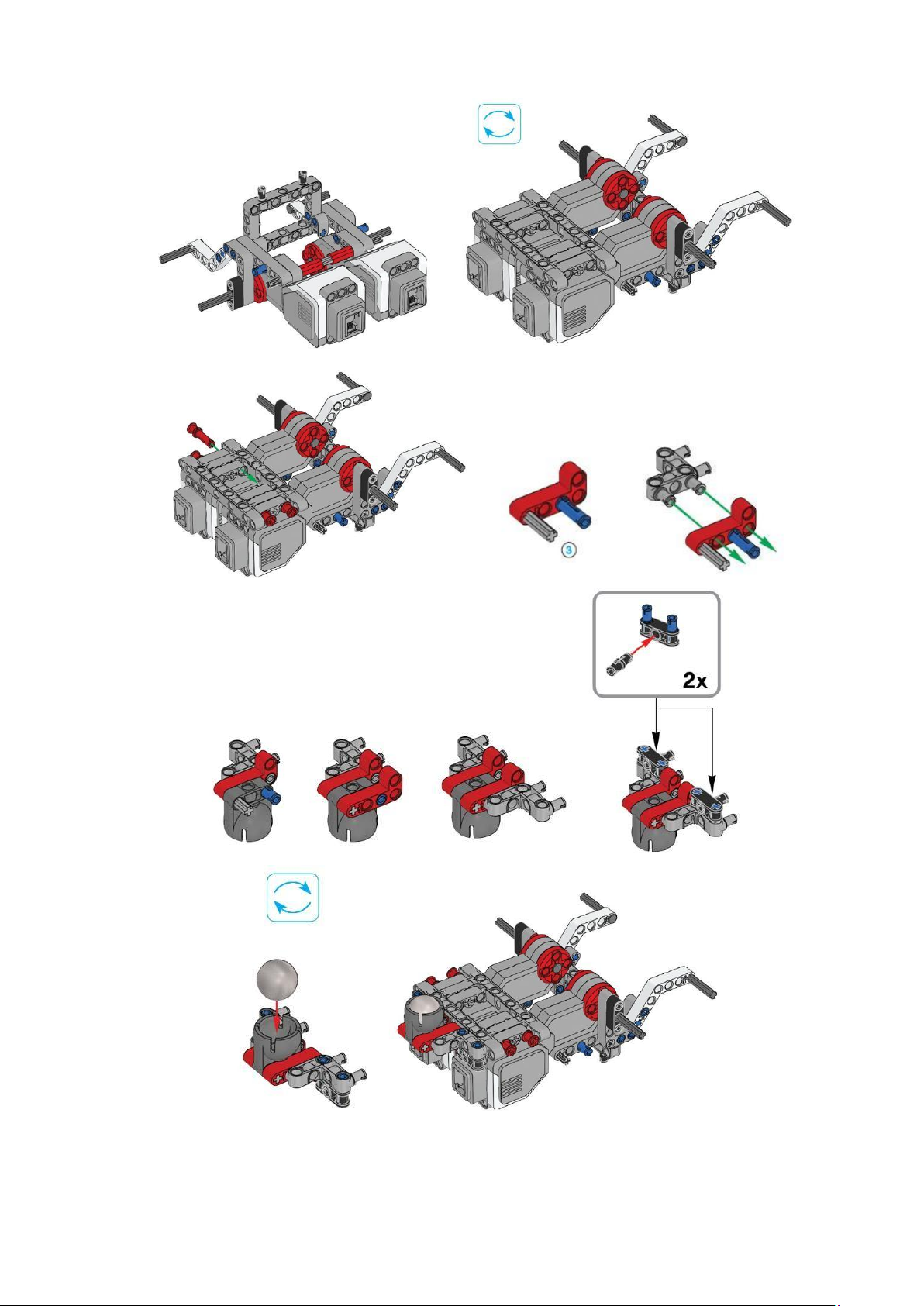
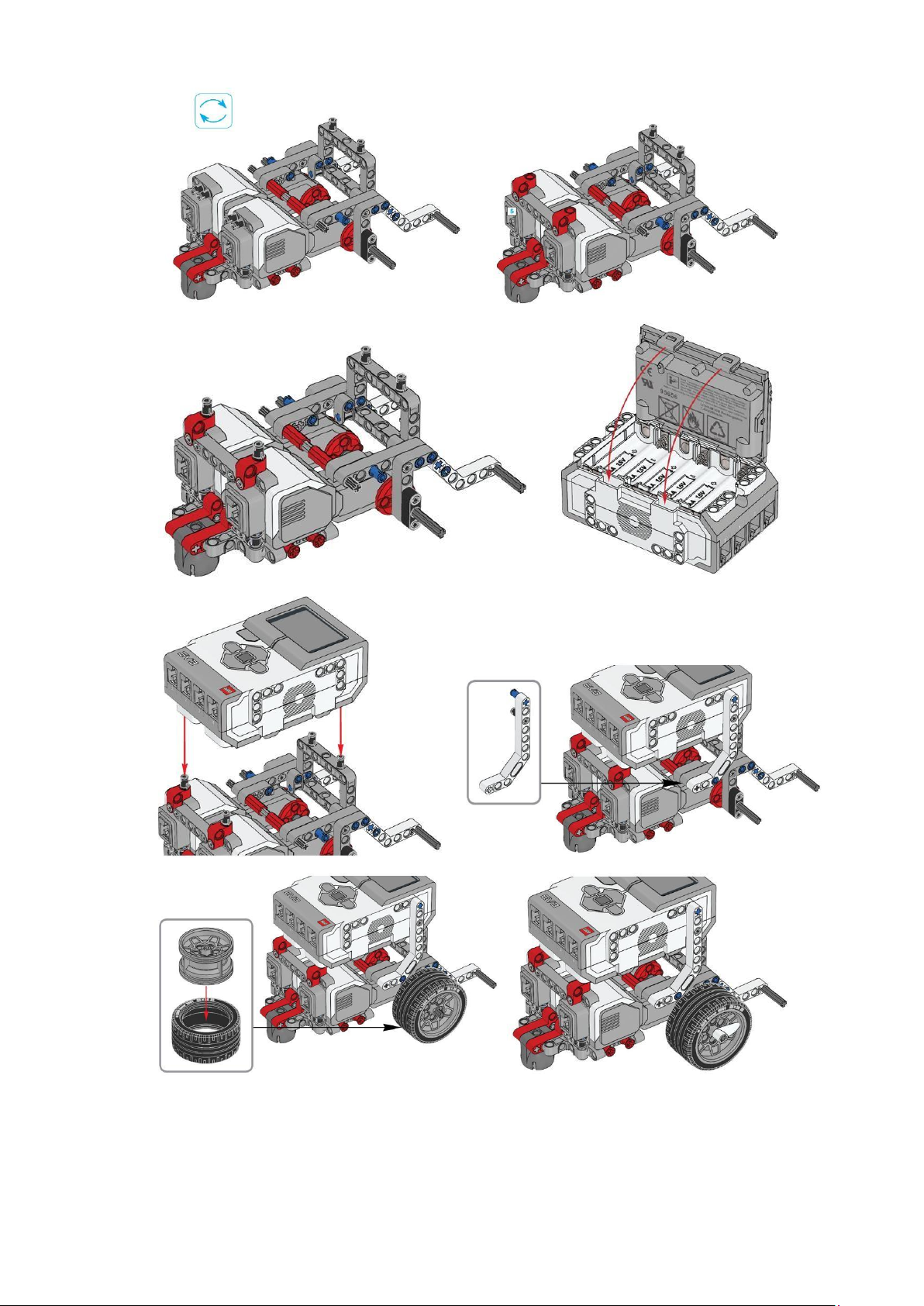
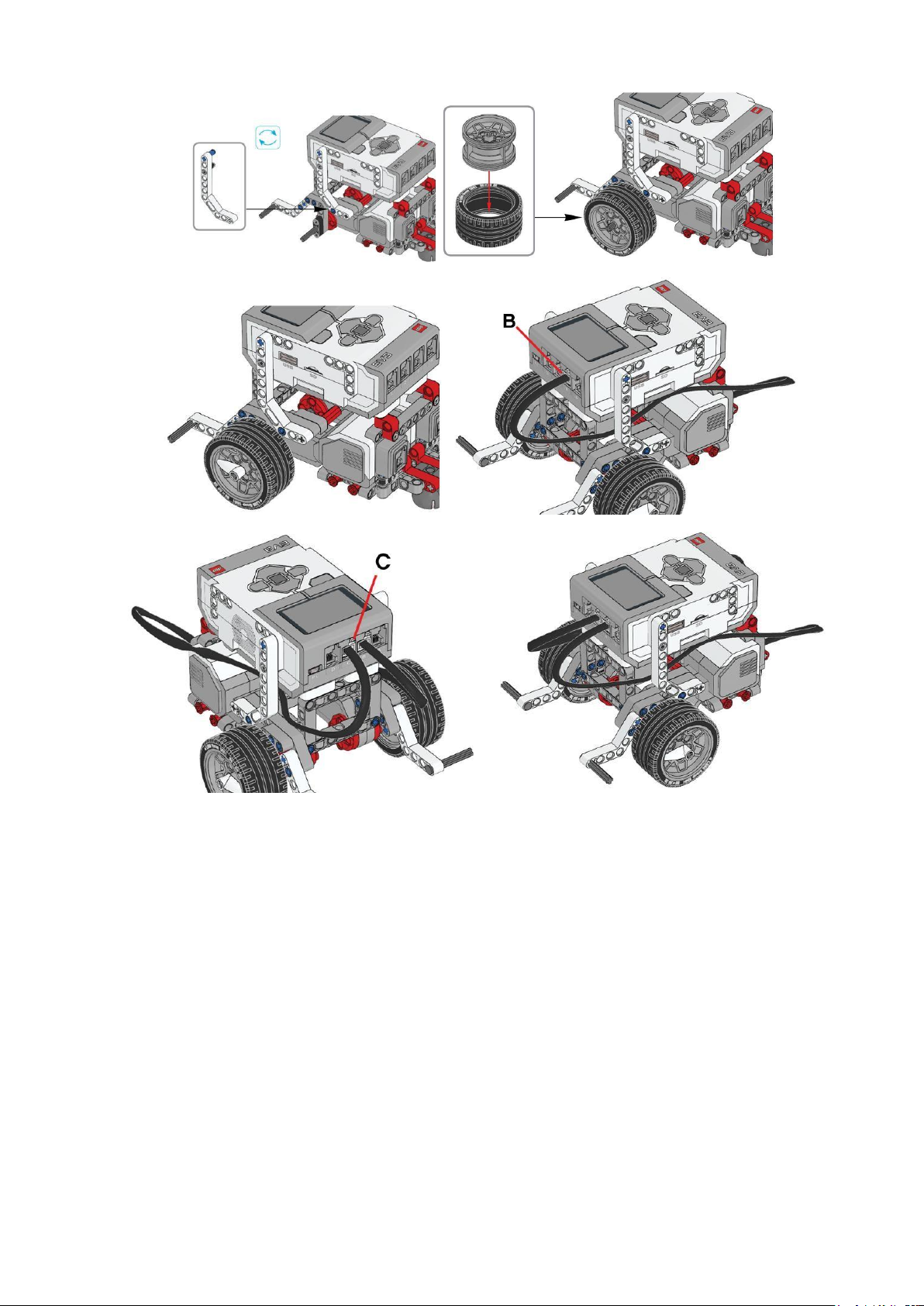
Xây dựng Hệ thống cơ điện tử như Hình 1 từ các mô đun có sẵn (Có thể tham khảo xây dựng hệ thống khác)
Hình 1: Mô hình Hệ thống lOMoAR cPSD| 61601590
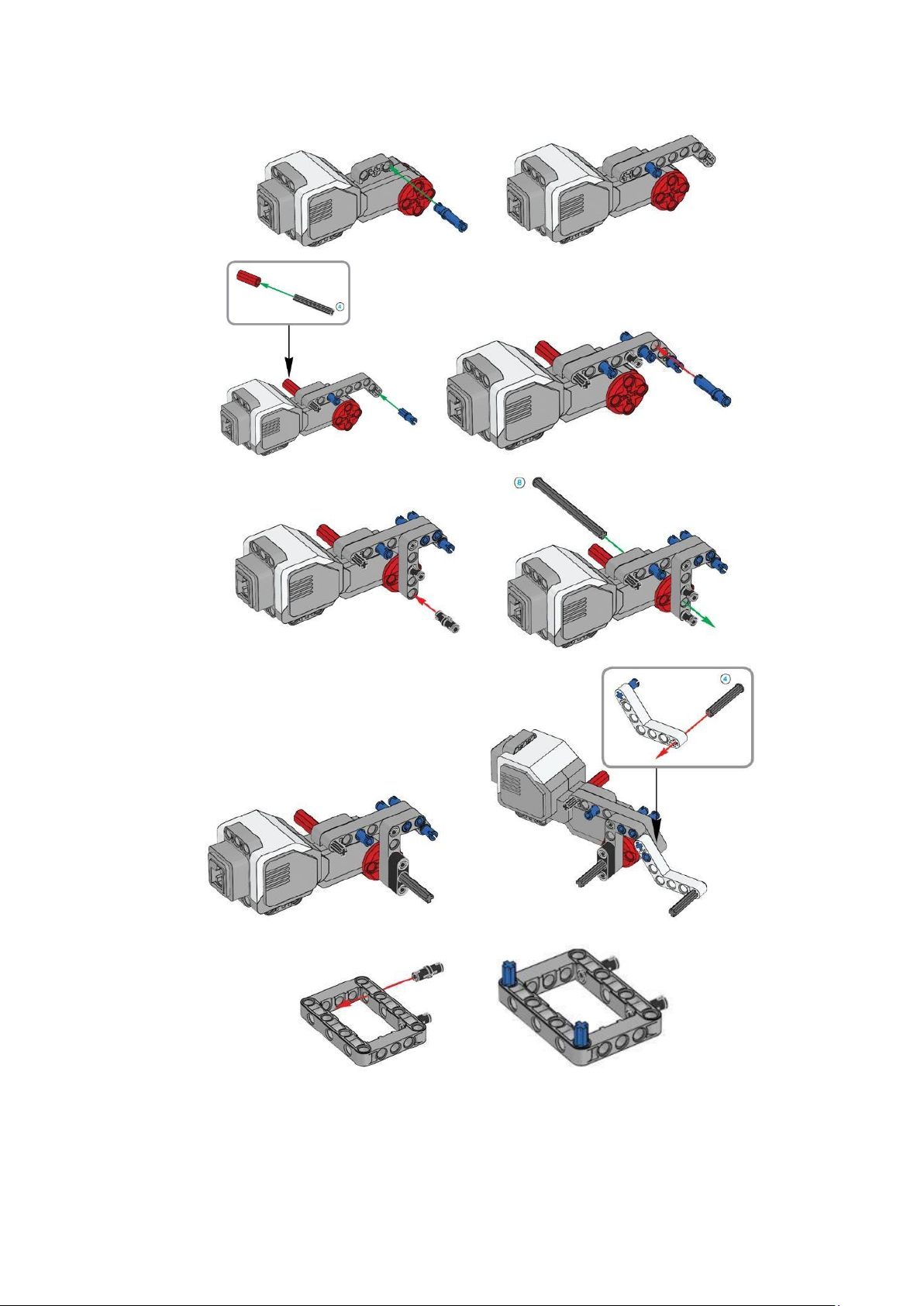
4.1.2 Cơ sở lý thuyết 4.1.3. Trình tự tiến hành thực hành/ thí nghiệm lOMoAR cPSD| 61601590 lOMoAR cPSD| 61601590 lOMoAR cPSD| 61601590 lOMoAR cPSD| 61601590
4.2. Lập trình điều khiển cho hệ thống
4.2.1. Mục đích
Hiểu được nguyên lý chuyển động của hệ thống. Lập trình cho hệ thống hoạt động.
4.2.2. Cở sở lý thuyết
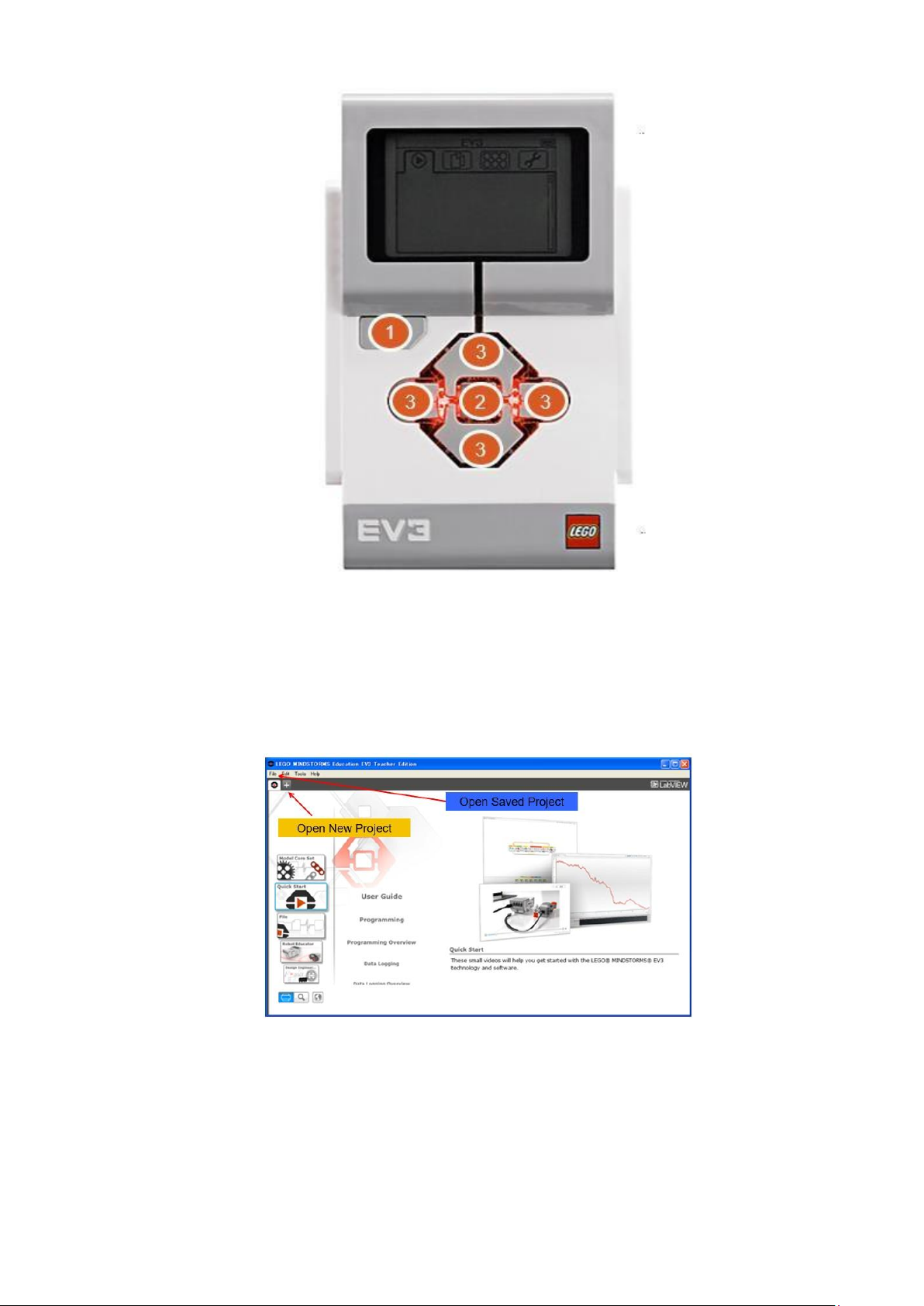
- Giao diện của Brick như Hình 2 lOMoAR cPSD| 61601590 Hình 2 Giao diện Brick Trong đó,
1 = Back: Quay lại; Dừng chương trình; Tắt nguồn robot
2 = Center Button: Lựa chọn cài đặt; Chạy chương trình; Khởi động robot
3 = L, R, Up, Down: Định hướng cho robot
- Giao diện của phần mềm lập trình
Hình 3 Màn hình chính khởi động của phần mềm lOMoAR cPSD| 61601590
Hình 4 Tạo một chương trình mới
Hình 5 Giao diện dùng để lập trình
Hình 6 Chức năng của các khối lập trình
Các khối lập trình cơ bản
- Khối Start: Khối lệnh Start dùng để bắt đầu 1 chuỗi lệnh trong chương trình. Một chương
trình có thể có nhiều chuỗi lệnh, các chuỗi lệnh được bắt đầu với khối lệnh Start sẽ được
chạy cùng lúc khi khởi động chương trình. lOMoAR cPSD| 61601590
Lưu ý: Nếu hệ thống đang được kết nối với máy tính, ta có thể Click chuột vào nút mũi tên màu
xanh trên lệnh Start để chạy chương trình. - Khối di chuyển Hình 7 Khối di chuyển
- Lập trình quay cho robot
Hình 8: Bảng giá trị để robot quay -
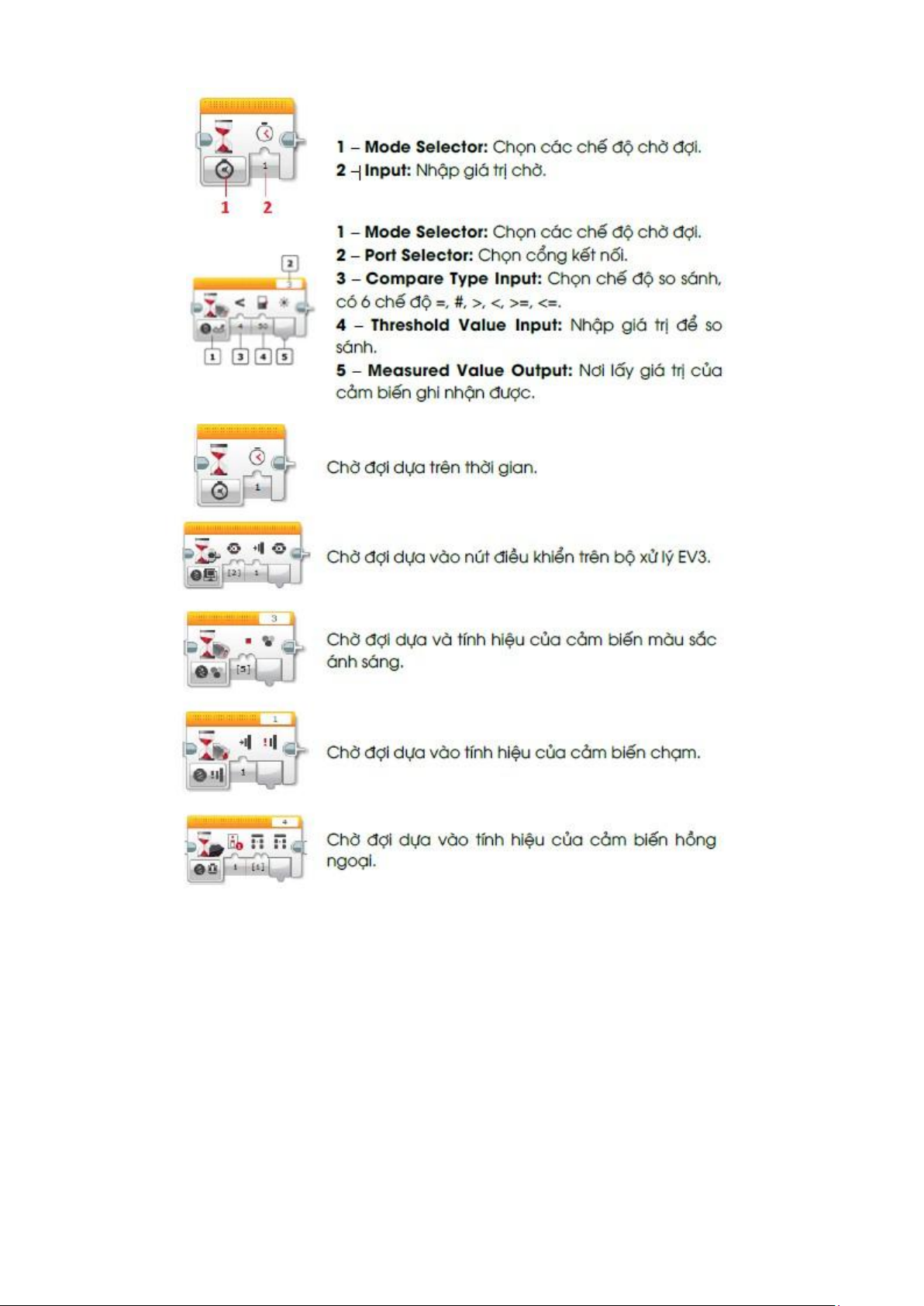
Khối chờ: Khối lệnh
chờ giúp cho chương trình chờ đợi trước khi thực hiện tiếp các khối lệnh tiếp theo. Khối lệnh
này có thể chờ đợi theo thời gian hoặc giá trị của cảm biến. Hình 9 Khối lệnh chờ
Lưu ý: Khối lệnh chờ không làm dừng chương trình đang hoạt động trên robot. Nếu có một động
cơ nào được bật trước khi bắt đầu khối lệnh chờ thì nó vẫn hoạt động trong thời gian chờ đợi.
Thiết lập khối lệnh chờ: lOMoAR cPSD| 61601590 lOMoAR cPSD| 61601590
Ví dụ 1: Điều khiển robot chuyển động đi thẳng
- STEP 1: Vào khối Green Block, Chọn và kéo khối Move Steeing vào giao diện mô phỏng Hình 10: Khối Green Block
Hình 11: Chọn khối Move Steering
Hình 12: Kéo khối move steering vào giao diện mô phỏng
Hình 13: Lập trình mẫu cho ví dụ 1 lOMoAR cPSD| 61601590
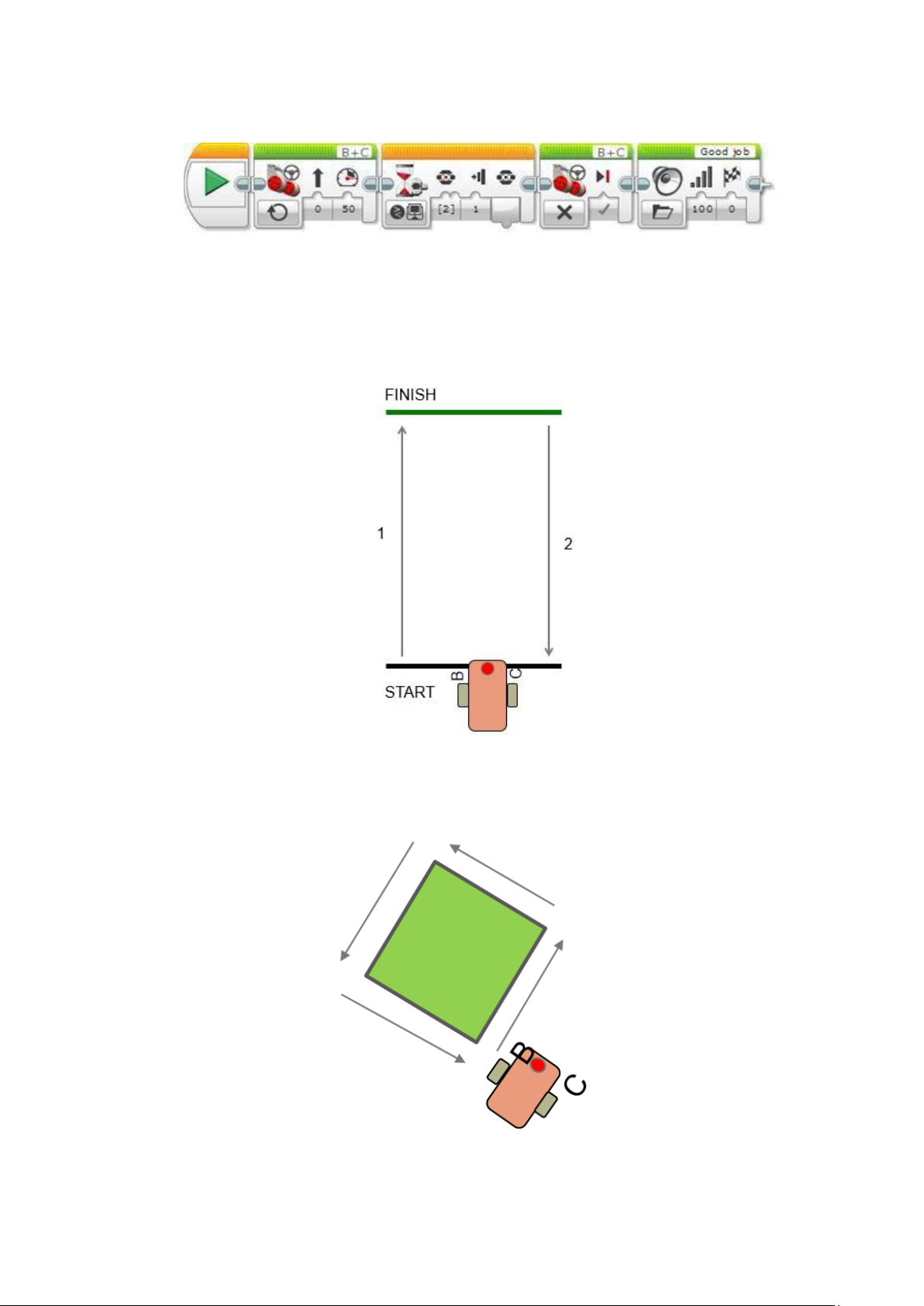
Ví dụ 2: Lập trình cho robot chạy thẳng cho đến khi nút Center trên bộ xử lý EV3 được ấn, sau
đó phát ra âm thanh good job Code mẫu:
Hình 14: Lập trình mẫu cho ví dụ 2
4.2.3. Yêu cầu công nghệ
- Yêu cầu công nghệ 1: Lập trình robot chuyển động thẳng từ vạch bắt đầu đến vạch kết
thúc, sau đó quay ngược trở lại vị trí bắt đầu như Hình 15 (thử nghiệm ở những vận tốc khác nhau)
Hình 15 Yêu cầu công nghệ 1
- Yêu cầu công nghệ 2: Lập trình robot chuyển động quoanh 1 khối hộp hình vuông như hình 16
Hình 16 Yêu cầu công nghệ 2 lOMoAR cPSD| 61601590
5. Báo cáo thu hoạch
5.1 Lập trình hệ thống
a. Chương trình vận hành theo yêu cầu công nghệ 1
……………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
…………………………………………………………………………………………………… lOMoAR cPSD| 61601590
b. Chương trình vận hành theo yêu cầu công nghệ 2
……………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
…………………………………………………………………………………………………… lOMoAR cPSD| 61601590
5.2 Kết luận
a. Về cấu tạo và các chức năng của hệ thống
……………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
b. Về hoạt động của hệ thống sau khi lập trình, các kiến nghị, đề xuất (nếu có)
……………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
…………………………………………………………………………………………………… Câu hỏi lOMoAR cPSD| 61601590
Hãy cho biết khi chạy các khối lệnh sau, hệ thống sẽ làm gì? Trả lời
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
…………………………………………………………………………………………………… lOMoAR cPSD| 61601590
……………………………………………………………………………………………………
Bài 2. Lập trình quỹ đạo cho hệ thống thực hiện nhiệm vụ công nghệ 1. Mục tiêu chung
- Lập trình điều khiển được hệ thống theo quỹ đạo bằng ngôn ngữ FBD(Function block diagram)/Matlab/C, C++, C#…
- Sử dụng thành thạo phần mềm Mindstorm EV3/Matlab/Visual Studio… để lập trình điều khiển
hệ thống Cơ điện tử.
2. Từ và thuật ngữ mới
- Motor Blocks: Khối điều khiển motor.
3. Trang thiết bị, dụng cụ, học liệu cần thiết - Máy tính.
- Phần mềm Mindstorm EV3/Matlab/Visual Studio…
- Mô hình cơ điện tử - Robot tự hành kiểu bánh xe/Hệ thông phân loại… xây dựng từ các
linh kiện trong phòng thí nghiệm: Lego mindstorm EV3 và modun mở rộng/ Nao v6…
4. Nội dung thực hành/ thí nghiệm
4.1 Xây dựng Hệ thống cơ điện tử
Xây dựng Hệ thống cơ điện tử như Hình 1 từ các mô đun có sẵn (Có thể tham khảo xây dựng hệ thống khác)
Hình 1: Mô hình Hệ thống
4.2. Lập trình điều khiển hệ thống
4.2.1. Mục đích
Phân tích được bài toán công nghệ, sử dụng các mô đun phù hợp cho bài toán công nghệ.
Lập trình điều khiển hệ thống thực hiện đúng yêu cầu công nghệ.
Tài liệu liên quan:
-

Đề cương ôn tập cuối kỳ hệ thống cơ điện tử | Đại học Bách khoa Hà Nội
56 28 -
Đồ án Thiết kế Hệ Thống Phân Loại Sản Phẩm Theo Chiều Cao | Môn Thiết kế hệ thống cơ điện tử - Đại học Bách Khoa Hà Nội
72 36 -

Đồ án Phân loại sản phẩm môn Thiết kế hệ thống cơ điện tử | Trường Đại học Bách Khoa Hà Nội
124 62 -

Đồ án môn Thiết kế hệ thống cơ điện tử | Trường Đại học Bách Khoa Hà Nội
109 55