Lý thuyết bài giảng môn Kỹ thuật cảm biến và đo lường nội dung chương 2: Các cơ cấu đo
Lý thuyết bài giảng môn Kỹ thuật cảm biến và đo lường nội dung chương 2: Các cơ cấu đo của Đại học Xây dựng Hà Nội với những kiến thức và thông tin bổ ích giúp sinh viên tham khảo, ôn luyện và phục vụ nhu cầu học tập của mình cụ thể là có định hướng ôn tập, nắm vững kiến thức môn học và làm bài tốt trong những bài kiểm tra, bài tiểu luận, bài tập kết thúc học phần, từ đó học tập tốt và có kết quả cao cũng như có thể vận dụng tốt những kiến thức mình đã học vào thực tiễn cuộc sống. Mời bạn đọc đón xem!
Môn: Kỹ thuật cảm biến và đo lường 14 tài liệu
Trường: Trường Đại học Xây Dựng Hà Nội 552 tài liệu
Tác giả:







Preview text:
lOMoARcPSD| 38777299
CHƯƠNG 2.- ĐO LƯỜNG ĐẠI LƯỢNG ĐIỆN - CÁC CƠ CẤU ĐO
2.1.- Cấu trúc cơ bản của thiết bị o.
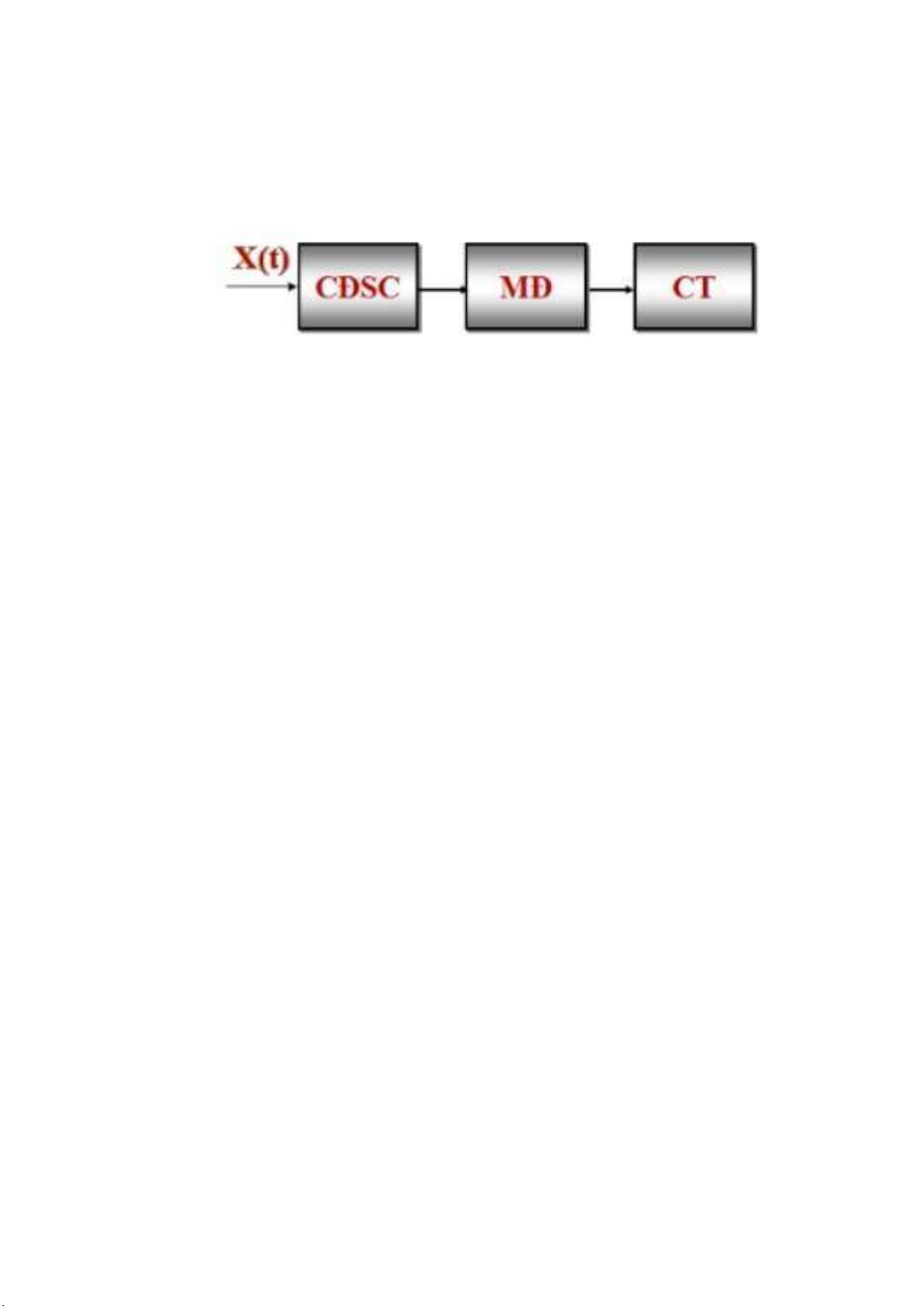
Một thiết bị o lường thường ược mô tả bởi sơ ồ khối cơ bản sau (hình 2.1).
Hình 2.1.- Sơ ồ khối cơ bản của một thiết bị o lường. trong ó : -
CĐSC – Chuyển ổi sơ cấp : làm nhiệm vụ biến ổi các ại lượng o không
iện thành tín hiệu iện. Đây còn gọi là các cảm biến hay sensor, ộ chính xác
của kết quả o phụ thuộc rất lớn vào ộ chính xác của biểu thức chuyển ổi. -
MĐ – Mạch o : là khâu gia công tính toán sau CĐSC, nó làm nhiệm vụ
tính toán và thực hiện phép tính trên sơ ồ mạch. Đó có thể là mạch iện tử
thông thường hoặc bộ vi xử lý ể nâng cao ặc tính của dụng cụ o. Tín hiệu cuối
cùng ra khỏi mạch o phải phù hợp với chỉ thị. Việc sử dụng chỉ thị lạo nào,
kết quả ra khỏi CĐSC ra sao sẽ quyết ịnh chức năng và kết cấu của mạch o.
Mạch này cũng phải ảm bảo cả việc mở rộng thang o cho thiết bị o. -
CT – Cơ cấu chỉ thị : là khâu cuối cùng của dụng cụ o ể hiển thị kết quả
o dưới dạng con số so với ơn vị o. Có 3 cách hiển thị kết quả o :
. Chỉ thị bằng kim trên vạch chia ộ.
. Chỉ thị bằng thiết bị tự ghi (màn hình, giấy từ, băng ĩa từ …). . Chỉ thị bằng số.
2.2.- Cấu tạo các cơ cấu chỉ thị.
Đây là khâu hiển thị kết quả o dưới dạng con số so với ơn vị của ại lượng cần o.
2.2.1.- Cơ cấu chỉ thị iện.
Với loại chỉ thị cơ iện, tín hiệu vào là dòng iện hoặc iện áp, còn tín hiệu ra là
góc quay của phần ộng (có gắn kim chỉ). Những dụng cụ này là loại dụng cụ o biến
ổi thẳng. Đại lượng cần o như dòng iện, iện áp, iện trở, tần số hay góc pha … ược lOMoARcPSD| 38777299
biến ổi thành góc quay của phần ộng, nghĩa là biến ổi năng lượng iện từ thành năng lượng cơ học : = F (X)
với : X là ại lượng iện,
là góc quay (hay góc lệch).
Để biết trị số o lường của ại lượng o, cần có một cơ cấu chỉ thị kết quả o
lường. Đối với các thiết bị o cổ iển, cơ cấu chỉ thị cơ iện nói chung chỉ bộ phận biến
tín hiệu iện thành tín hiệu cơ là góc quay của kim chỉ thị. Bộ phận tĩnh là từ trường
không ổi do nam châm vĩnh cửu hoặc từ trường thay ổi do cuộn dây tạo ra. Phần
ộng là khung dây có dòng iện cần o i qua. Khung dây gồm nhiều vòng dây ồng nhỏ
gắn trên trục quay và gắn với kim chỉ.
Kim chỉ thị sẽ di chuyển trên mặt có vạch ộ chia và số tùy thuộc vào vị trí
của kim chỉ thị mà ta sẽ ọc ược kết quả o. Dụng cụ o tương tự (analog) là loại dụng
cụ o mà số chỉ của dụng cụ tỷ lệ với ại lượng o (là ại lượng liên tục). Trong các dụng
cụ o tương tự, thường dùng các chỉ thị cơ iện, vì thế tín hiệu vào là dòng iện hay iện
áp, còn tín hiệu ra là góc quay của phần ộng (kim chỉ thị) hoặc sự di chuyển của bút
ghi trên máy (dụng cụ tự ghi). Những dụng cụ này chính là những dụng cụ o biến ổi
thẳng. Các ại lượng cần o là những ại lượng iện như : dòng iện, iện áp, tần số … ược
biến ổi thành góc quay của phần ộng nghiã là biến ổi năng lượng iện thành năng
lượng cơ học α = f(x), trong ó x là ại lượng iện, α là góc quay.
Đối với các cơ cấu chỉ thị của thiết bị hiện ại ngày nay thường dùng LED ể chỉ thị kết quả.
2.2.1.1.- Nguyên lý làm việc của các chỉ thị cơ iện.
Chỉ thị cơ iện bao giờ cũng gồm hai phần cơ bản là : phần tĩnh và phần ộng.
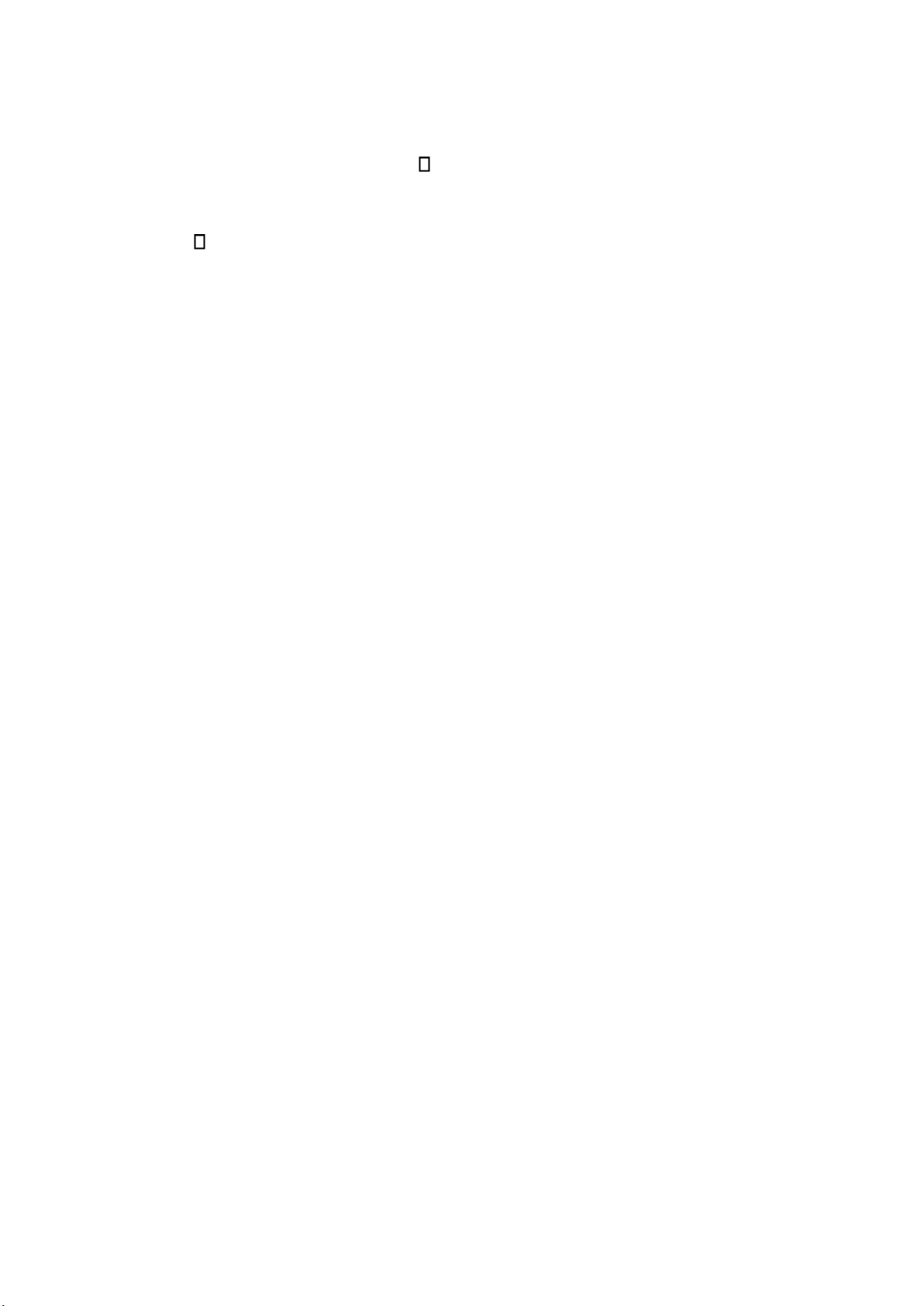
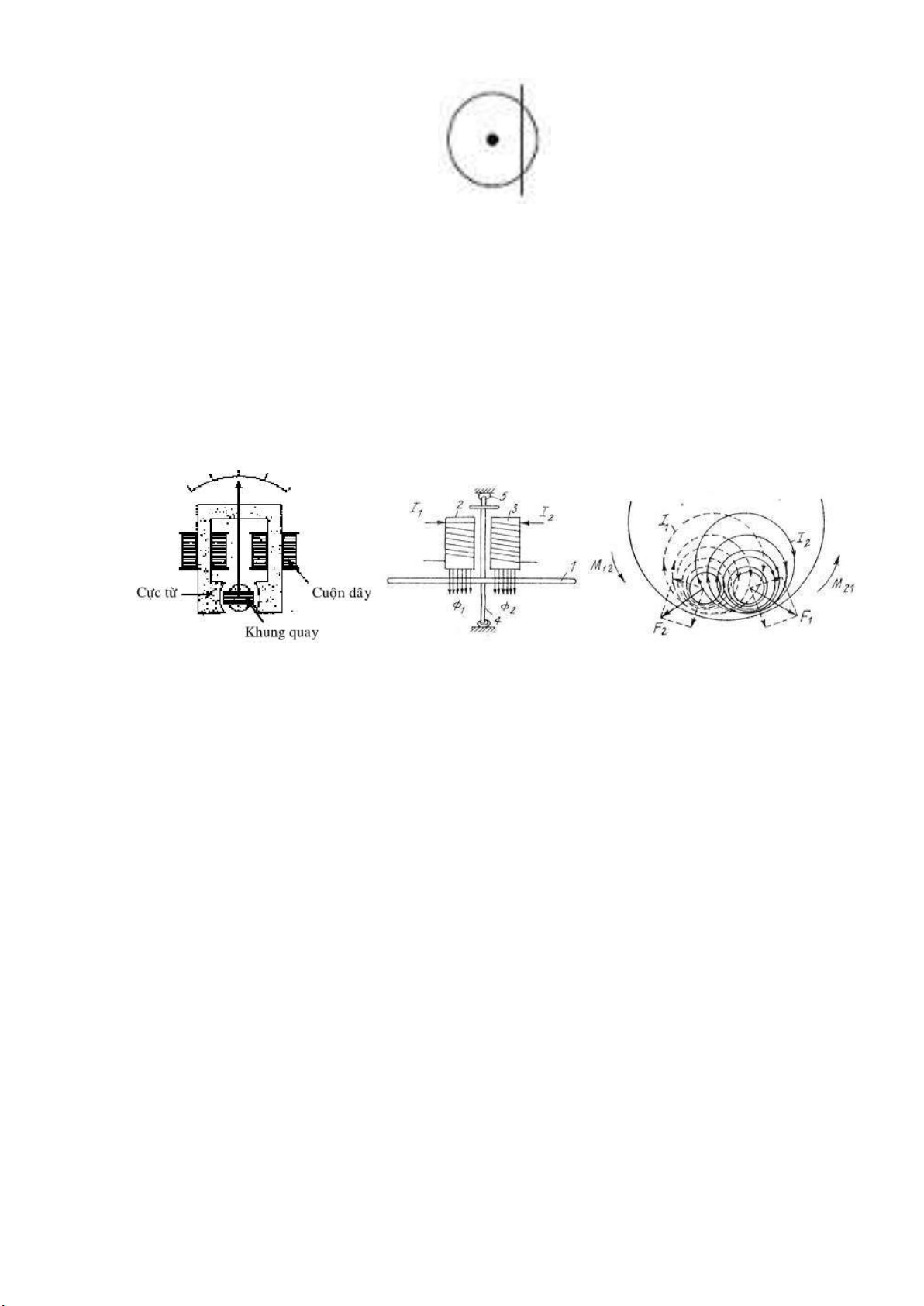
Nguyên tắc làm việc dựa trên hiện tượng cảm ứng iện từ. Khi một vật dẫn có
dòng iện chạy qua ược ặt trong từ trường của một nam châm thì nó sẽ chịu tác dụng
của lực từ theo quy tắc bàn tay trái (hình 2.2). lOMoARcPSD| 38777299 a) b)
Hình 2.2.- a) Quy tắc bàn tay trái ể xác ịnh chiều lực từ. b)
Xác ịnh góc lệch của kim chỉ thị khi Mq = Mc.
Khi cho dòng iện vào một cơ cấu chỉ thị cơ iện, do tác ộng của từ trường lên
phần ộng của cơ cấu o sẽ tạo ra moment quay (lực) Mq . Độ lớn của môment này sẽ
phụ thuộc vào ộ lớn của từ trường và cường ộ dòng iện chạy trong vật dẫn. Lúc này
sẽ xuất hiện moment quay làm quay phần ộng và ược tính theo biểu thức : w M e q = d d
trong ó : We là năng lượng từ trường,
α là góc quay phần ộng.
Phần ộng sẽ quay liên tục với tốc ộ phụ thuộc vào ộ lớn của năng lượng từ trường
hay dòng iện ưa vào cơ cấu. Lực làm quay phần ộng còn gọi là lực làm lệch.
Nếu ta ặt vào trục của phần ộng một lò xo cản (hoặc một cơ cấu cản), khi phần ộng
quay, lò xo bị xoắn lại (hoặc giãn ra) và sinh ra moment cản trở sự chuyển ộng của
phần ộng. Lực chống lại sự di chuyển của phần ộng còn gọi là lực iều khiển. Môment
cản này tỷ lệ thuận với góc lệch α và ược biểu diễn bằng biểu thức : MC = D . α
với : D là hệ số momen cản riêng của lò xo, nó phụ thuộc vào hình dáng, kích thước
và vật liệu chế tạo lò xo.
Chiều tác ộng lên phần ộng của hai moment kể trên ngược chiều nhau nên khi
moment cản bằng moment quay thì phần ộng sẽ dừng lại ở vị trí cân bằng (xem hình 2.1). lOMoARcPSD| 38777299
Khi moment cản bằng moment quay, phần ộng của cơ cấu o dừng lại ở vị
trí cân bằng, lúc ó : Mq = MC w hay : d e = D . α d Suy ra : α = 1 . d we D d
Phương trình trên là phương trình ặc tính (hay lượng trình) của thang o. Từ phương
trình trên, biết ược ặc tính của thang o và tính chất của cơ cấu chỉ thị.
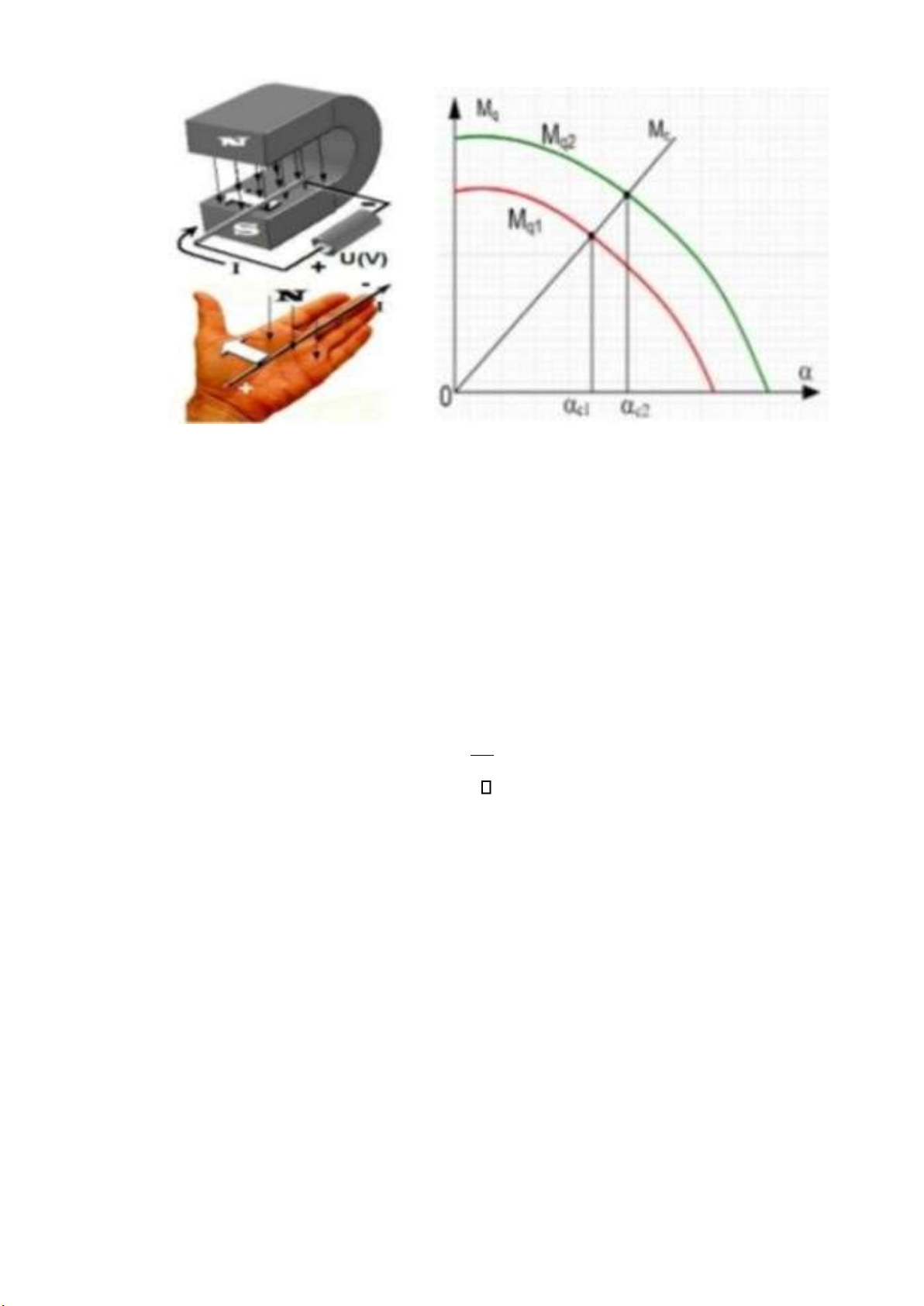
2.2.1.2.- Các bộ phận chính và chi tiết chung của cơ cấu chỉ thị cơ iện. a.- Trục, trụ.
Là bộ phận ảm bảo cho phần ộng quay trên trục như : khung dây, lò xo cản, kim chỉ thị … (hình 2.3).
Trục ược làm bằng thép cứng pha iridi hoặc osimic, có tiết diện tròn, ường kính từ
0,8 mm ến 1,5 mm. Đầu trục hình chóp với góc ỉnh là γ = 45o ÷ 60o và ỉnh bán cầu
có bán kính 0,05 ÷ 0,3 mm. Trụ ỡ làm bằng á cứng agat hay carbua rundum.
Hình 2.3.- Bộ phận trụ và trục ỡ của cơ cấu chỉ thị cơ iện.
Kim có hình dáng như hình 2.6. Kim chỉ thị ược chế tạo bằng nhôm hay hợp
kim nhôm. Với dụng cụ có cấp chính xác cao, kim ược làm bằng thủy tinh, hình
dáng của kim chỉ thị ược chế tạo tùy thuộc cấp chính xác của dụng cụ o và
vị trí ặt dụng cụ ể quan sát.
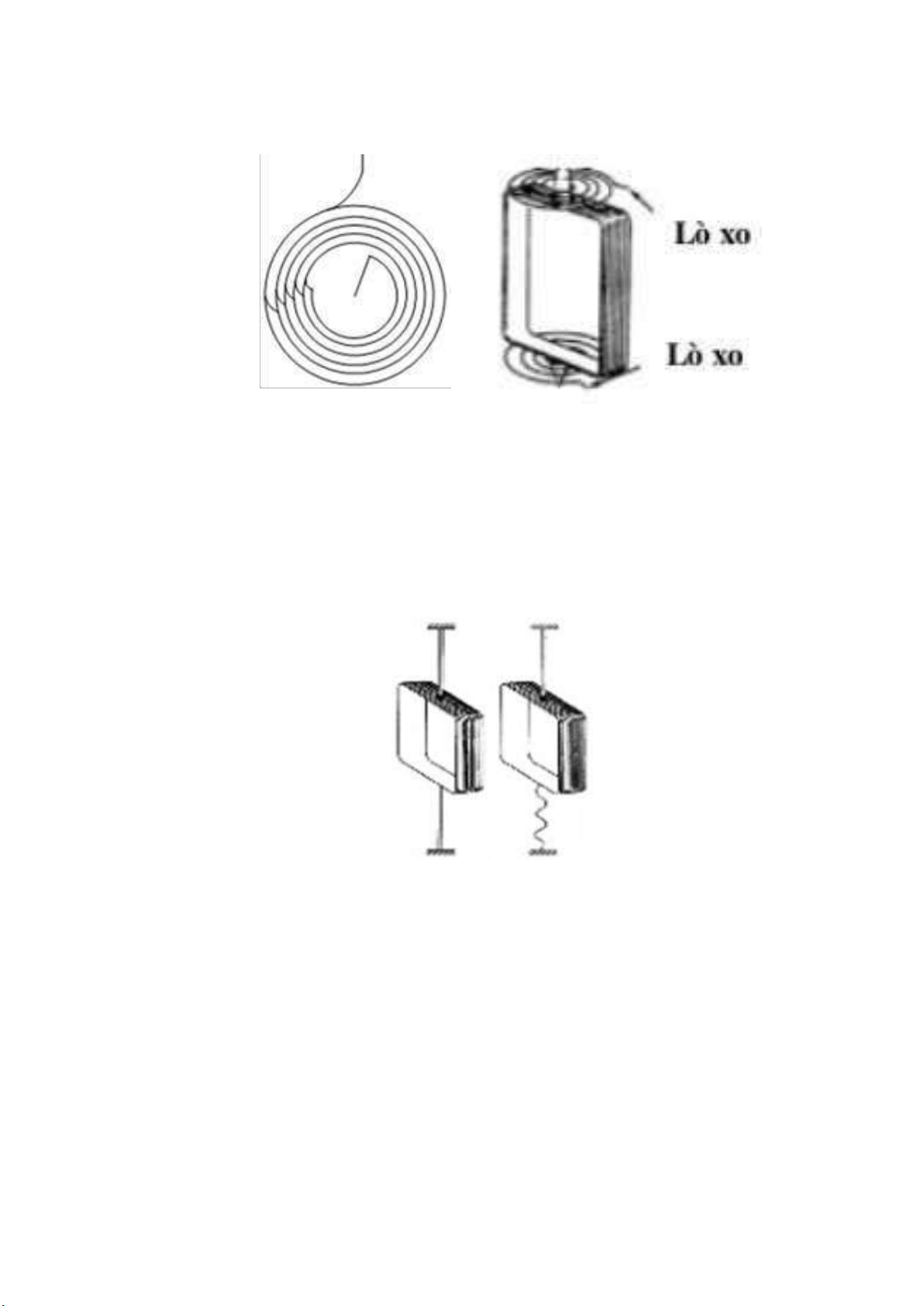
b.- Lò xo phản kháng (lò xo cản).
Là chi tiết thực hiện hai nhiệm vụ : -
Tạo ra môment cản, ưa kim chỉ thị về vị trí “0” khi chưa ưa ại lượng cần o vào, -
Dẫn dòng iện vào khung dây ( ối với cơ cấu chỉ thị từ iện hoặc iện ộng).
Lò xo ược chế tạo bằng ồng berili hoặc ồng phốt phát ể có ộ àn hồi tốt và dễ hàn. lOMoARcPSD| 38777299
Lò xo ược chế tạo thành hình xoắn ốc (hình 2.4) bằng ồng berili hoặc ồng phốt pho
ể có ộ àn hồi tốt và dễ hàn. Thông thường sẽ có hai lò xo ối xứng ở hai ầu khung
dây, chúng có kích thước rất mảnh nên rất dễ hỏng.
Hình 2.4.- Lò xo phản kháng.
c.- Dây căng và dây treo.
Khi cần giảm môment cản ể tăng ộ nhạy của cơ cấu chỉ thị, sẽ thay lò xo bằng dây căng hay dây treo.
Dây căng và dây treo là các oạn dây phẳng, có tiết diện hình chữ nhật ược làm bằng
ồng berili hoặc ồng phốt phát (hình 2.5). Mômemt phản kháng của dây căng và dây
treo nhỏ ể hạn chế ma sát. a) b)
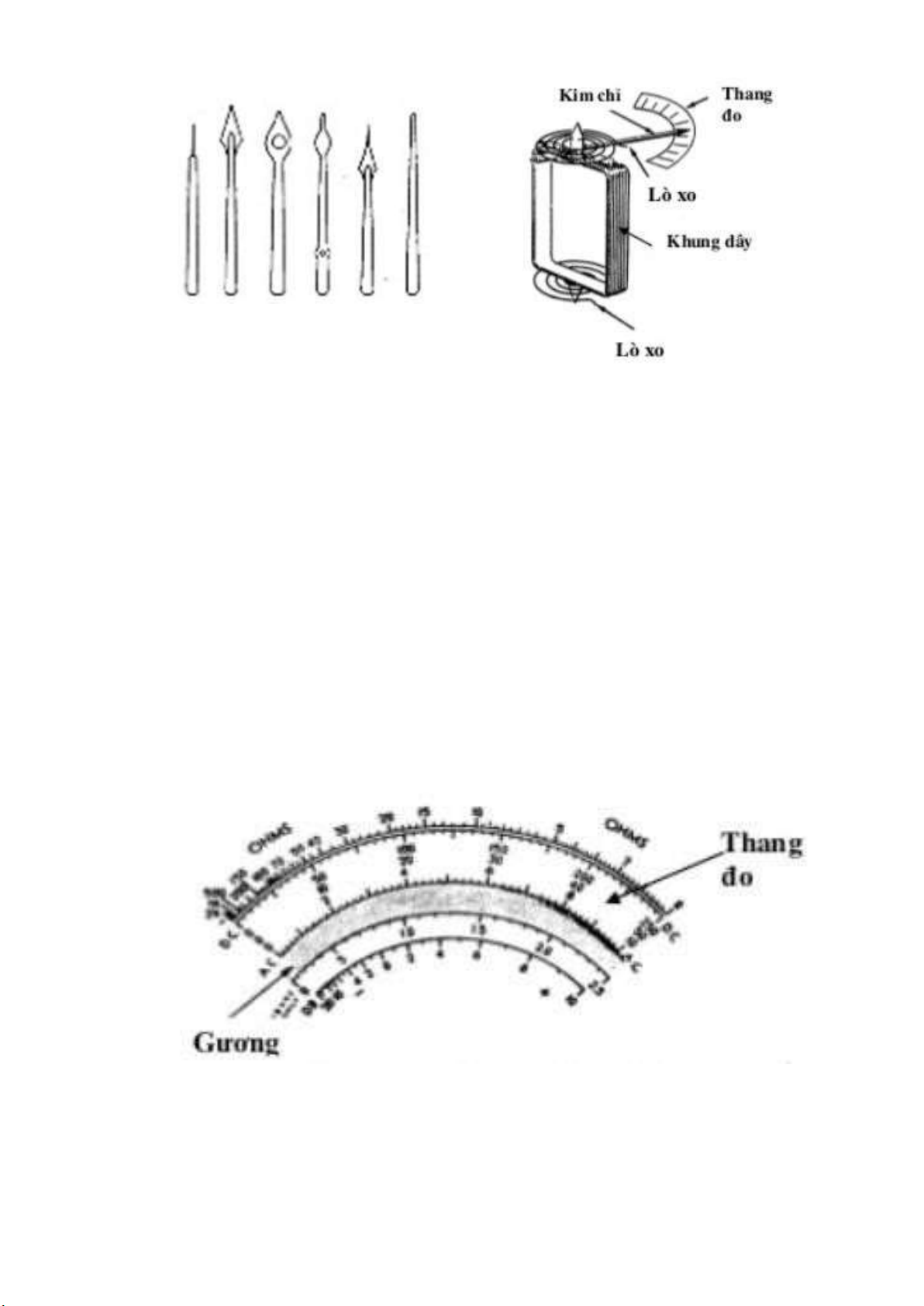
Hình 2.5.- Khung dây với dây căng (a) và dây treo (b). d.- Kim chỉ thị.
Kim có hình dáng như hình 2.6. Kim chỉ thị ược chế tạo bằng nhôm hay hợp
kim nhôm với nhiều hình dáng khác nhau. Với dụng cụ có cấp chính xác cao, kim
ược làm bằng thủy tinh, hình dáng của kim chỉ thị ược chế tạo tùy thuộc cấp chính
xác của dụng cụ o và vị trí ặt dụng cụ ể quan sát.
Kim ược gắn vào trục. Giá trị tương ứng với vị trí lệch tối a của kim chỉ thị
gọi là ộ lệch toàn thang (ĐLTT). lOMoARcPSD| 38777299
Hình 2.6.- Hình dáng các loại kim chỉ thị. .- Thang o.
Là bộ phận ể khắc ộ các giá trị của ại lượng cần o.
Có nhiều loại thang o tùy thuộc vào ộ chính xác của chỉ thị cũng như bản chất
của cơ cấu chỉ thị. Thang o thường ược chế tạo từ nhôm lá, trên mặt có khắc vạch
chia ộ. Để tránh sai số trong quá trình o, trên mặt thang o ược gắn thêm "mặt gương"
phản chiếu phía dưới và khi ọc kết quả o bắt buộc kim và bóng của kim o trên mặt
gương phải trùng nhau. Đặc biệt với các dụng cụ làm việc cả ngày lẫn êm, các số
trên thang o ược kẻ bằng chất phát quang (dạ quang) trong bóng tối. Có nhiều loại
thang o khác nhau, tùy thuộc cấp chính xác và bản chất của cơ cấu o. Thông dụng
nhất là loại thang o có góc lệch kim là ± 45o về hai phía so với trục thẳng ứng nghĩa
là có góc lệch kim o là α = 90o (hình 2.7).
Hình 2.7.- Một loại thang o thường dùng trên chỉ thị cơ iện. lOMoARcPSD| 38777299
Nhìn vào thang o của thiết bị o tương tự có thể xác ịnh ộ phân giải và ộ nhạy của thiết bị .
Độ phân giải bằng ộ lệch toàn thang chia cho tổng số vạch của thang o ó.
Độ nhạy bằng ộ phân giải bé nhất trong số các thang o.
Ví dụ : một Volkế tương tự có các thang o 50 vạch với ộ lệch toàn thang là
10V; 100V; 500V. Khi ó ộ phân giải tương ứng với mỗi ộ lệch toàn thang là 0,2V;
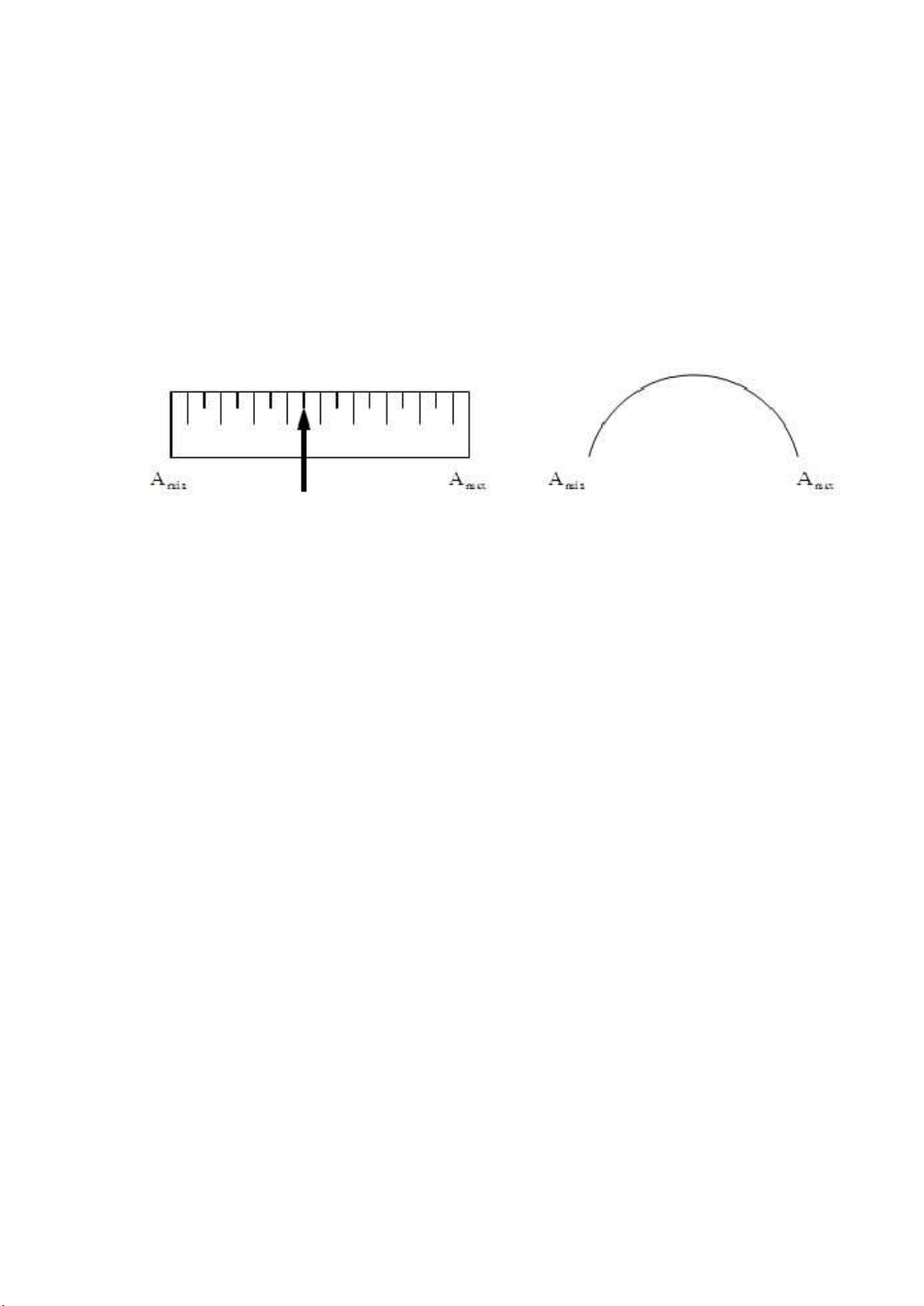
2V và 10V. Độ nhạy của Volkế này là 0,2V. Trên thang o thường có :
- Giới hạn o dưới Amin & Giới hạn o trên Amax (hình 2.8).
Hình 2.8.- Giới hạn trên thang o.
- Khoảng cách giữa hai vạch gần nhất gọi là một ộ chia. Thước
chia ộ có thể 1 phía, 2 phía, chứa hoặc không chứa iểm 0.
- Giá trị của ộ chia : là trị số biến ổi của lượng bị o làm cho kim
di chuyển 1 ộ chia, ộ chia có thể ều hay không ều tùy giá trị mỗi ộ chia
bằng nhau hay khác nhau. Có thể ọc trực tiếp hay phải nhân thêm các hệ số nào ó.
- Khoảng o là khoảng chia của thang từ giới hạn dưới ến giới hạn trên.
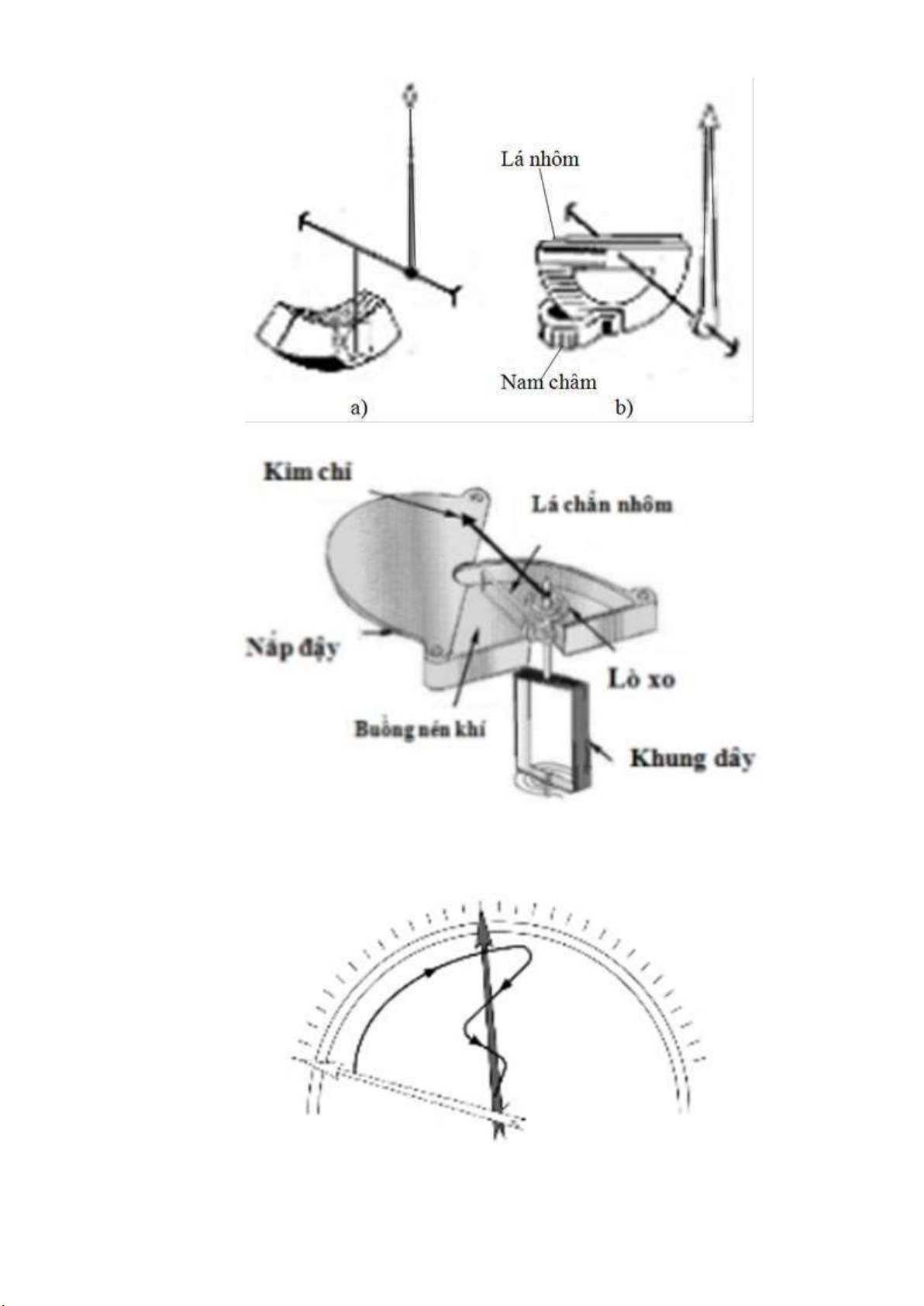
e.- Bộ phận cản dịu.
Là bộ phận làm giảm quá trình dao ộng của phần ộng và xác ịnh vị trí cân bằng ược
nhanh chóng. Quá trình này còn gọi là quá trình làm nhụt.
Cản dịu ược phân thành hai loại :
- Cản dịu bằng không khí.
- Cản dịu kiểu cảm ứng từ lOMoARcPSD| 38777299 c) d) lOMoARcPSD| 38777299
Hình 2.9.- Bộ cản dịu.
a) Cản dịu không khí ; b) Cản dịu cảm ứng từ ; c) Bộ phận cản dịu ;
d) Quá trình di chuyển của kim chỉ trước khi cân bằng.
Cản dịu không khí ơn giản nhất có cấu tạo như hình 2.9.a : một hộp kim loại kín
trong có lá nhôm chuyển ộng ược gắn liền với trục quay. Khi phần ộng của cơ cấu
chỉ thị chuyển ộng, lá nhôm chuyển ộng theo tạo nên lực cản làm giảm quá trình dao ộng.
Cản dịu cảm ứng từ gồm một lá nhôm mỏng dạng hình quạt di chuyển trong khe hở
của nam châm vĩnh cửu (hình 2.9.b). Khi lá nhôm chuyển ộng, từ trường xuyên qua
lá nhôm tạo nên dòng cảm ứng trong lá nhôm chống lại sự di chuyển ó.
2.2.1.3.- Công dụng của các dụng cụ o.
- Ampe kế ( A ) dùng o dòng iện có cường ộ lớn ( > 1 A ).
- Miliampe kế ( mA ) dùng o dòng iện có cường ộ nhỏ ( < 1000 mA ).
- Volt kế ( V hoặc KV ) dùng ể o iện áp.
- Milivolt kế ( mV ) dùng ể o iện áp milivolt.
- Kilowatt hoặc Watt kế ( KW hoặc W ) dùng ể o công suất.
- Điện năng kế ( Wh hoặc KWh ) dùng ể o iện năng tiêu thụ.
2.2.2.- Cơ cấu từ iện. 2.2.2.1.- Ký hiệu.
Cơ cấu từ iện một chiều Cơ cấu từ iện xoay chiều
Hình 2.10.- Ký hiệu cơ cấu từ iện. 2.2.2.2.- Cấu tạo.
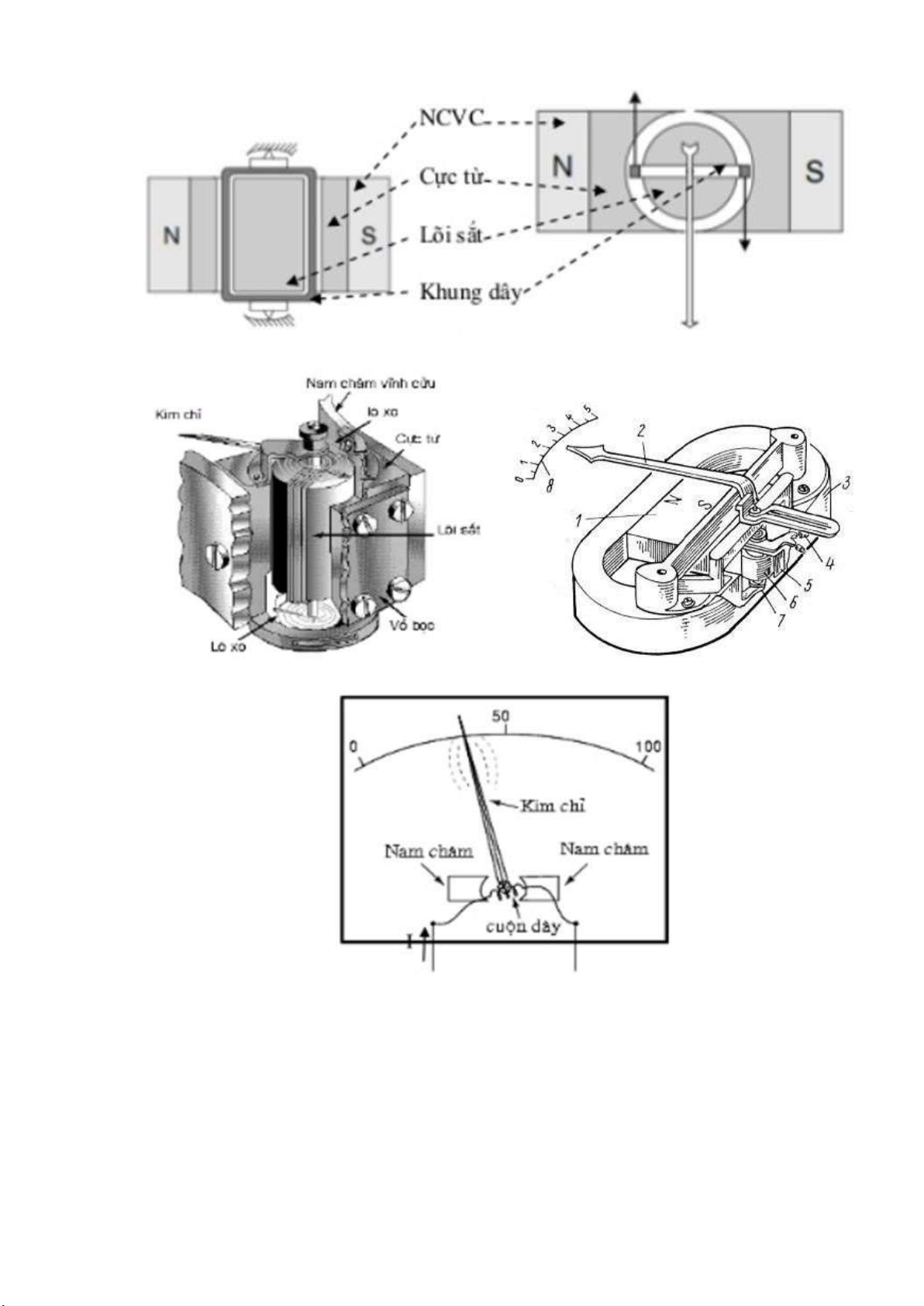
Bộ phận chỉ thị dùng cơ cấu từ iện gồm hai phần cơ bản : phần tĩnh và lOMoARcPSD| 38777299 phần ộng (hình 2.11) : a) b) c) d)
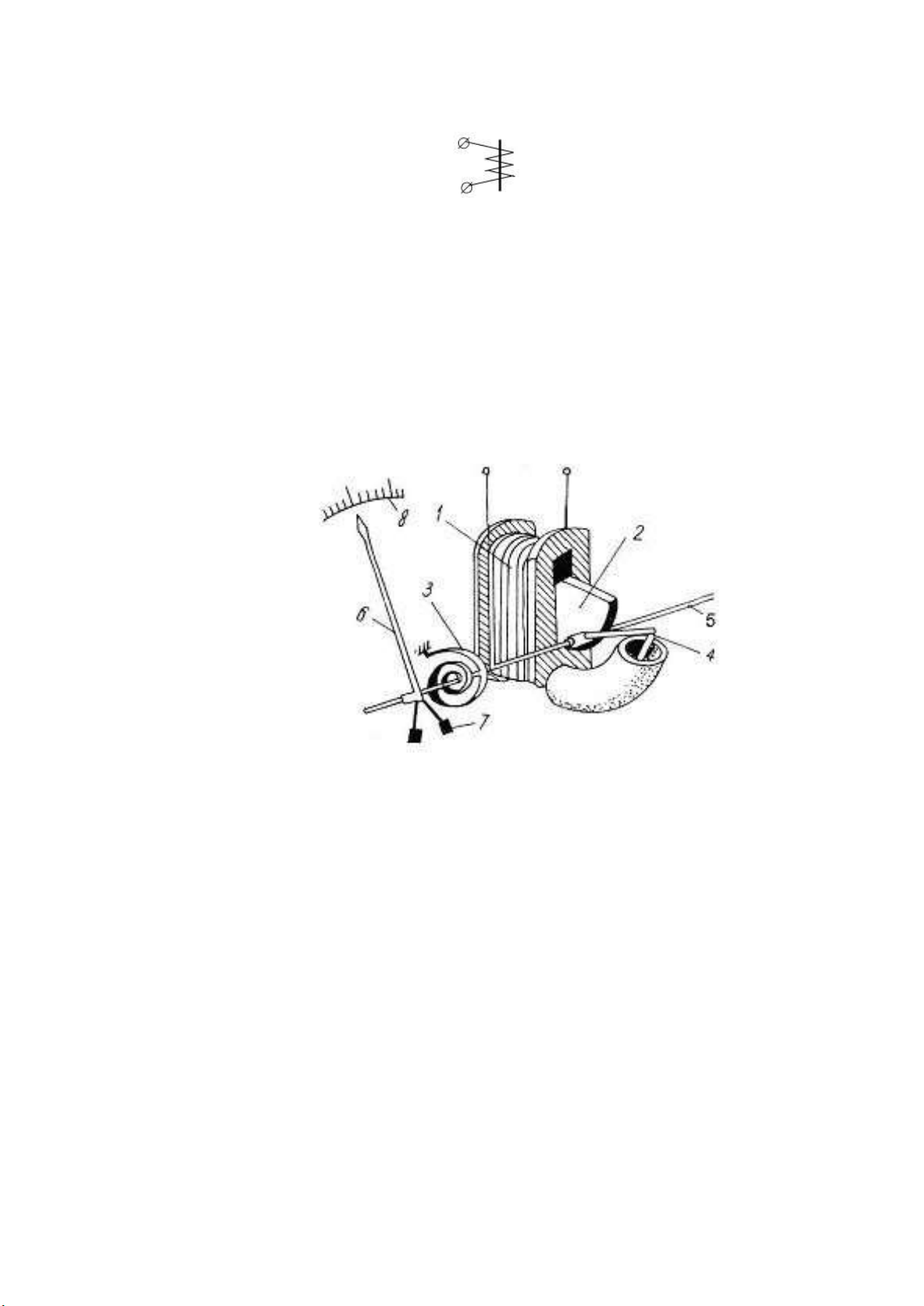
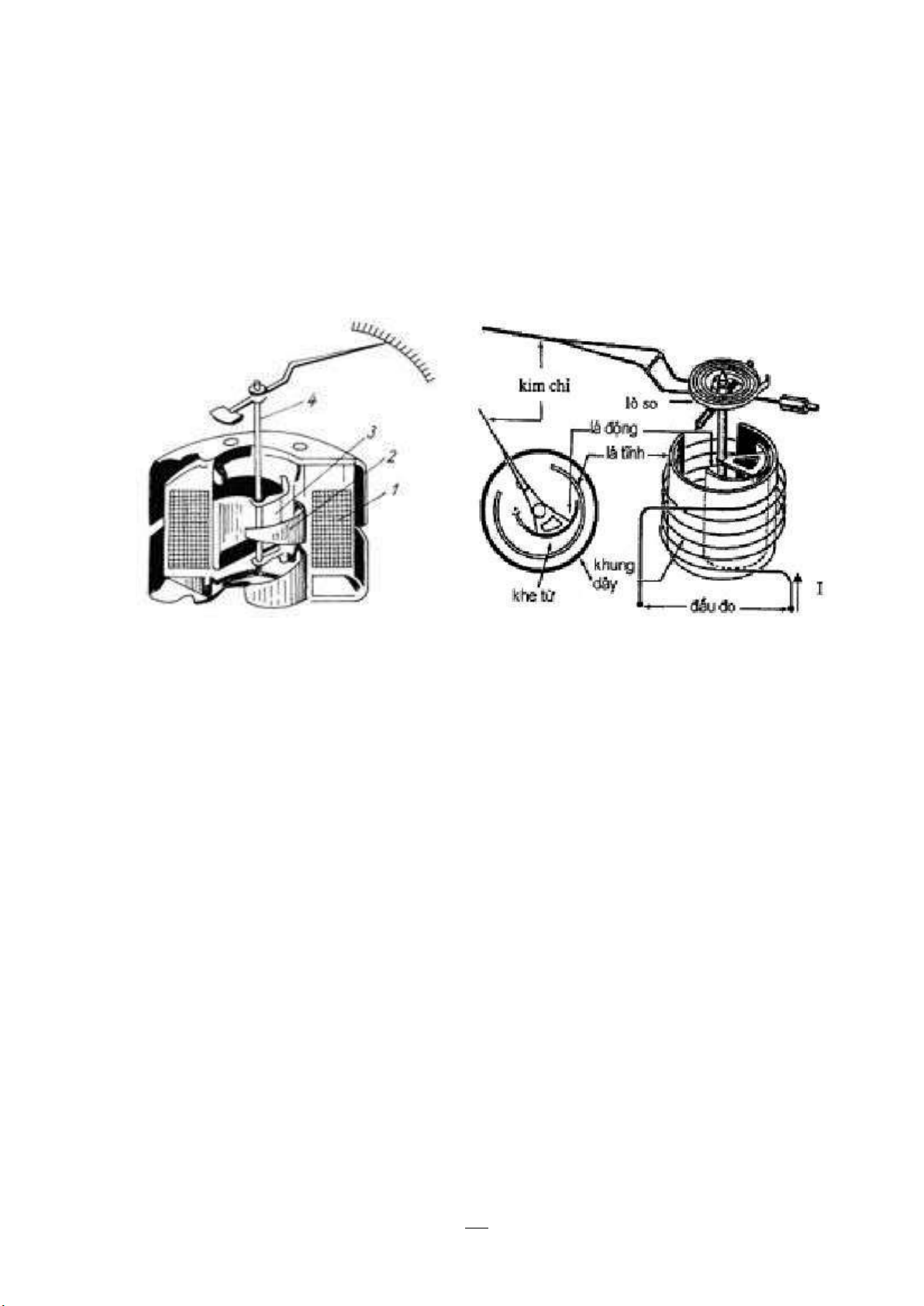
Hình 2.11.- Cấu tạo cơ cấu o từ iện.
a) Hình chiếu ứng của cơ cấu chỉ thị từ iện ; b) Hình chiếu bằng của cơ cấu chỉ thị từ iện ;
c) Cấu trúc thực thế ; d) Sơ ồ giản lược của cơ cấu chỉ thị từ iện. lOMoARcPSD| 38777299 Phần tĩnh :
Gồm : Nam châm vĩnh cửu 1(hình móng ngựa), mạch từ và cực từ 3, lõi sắt 6
hình thành mạch từ kín. Giữa cực từ 3 và lõi sắt 6 có khe hở không khí ều gọi là khe
hở làm việc, ở giữa ặt khung quay chuyển ộng. Đường sức qua khe hở làm việc
hướng tâm tại mọi iểm. Trong khe hở này có ộ từ cảm B ều nhau tại mọi iểm (hình 2.12) :
Hình 2.12.- Phân bố của ộ từ cảm B. Phần ộng :
Gồm : Khung dây quay 5 ược quấn bằng dây ồng. Khung dây ược gắn vào
trục quay (hoặc dây căng, dây treo), nó quay trong khe hở không khí. Trên trục quay
có hai lò xo cản 7 mắc ngược nhau, kim chỉ thị 2 và thang o 8.
2.2.2.3.- Nguyên lý làm việc chung.
Khi có dòng iện cần o I i vào khung dây 5, sẽ tác dụng với từ trường ở khe hở
làm việc tạo ra lực iện từ F : F = N . B . I . L
trong ó : N là số vòng dây quấn của khung dây 5,
B là mật ộ từ thông xuyên qua khung dây quay 5 (cảm ứng từ),
L là chiều dài của khung dây quay 5,
I là cường ộ dòng iện. lOMoARcPSD| 38777299
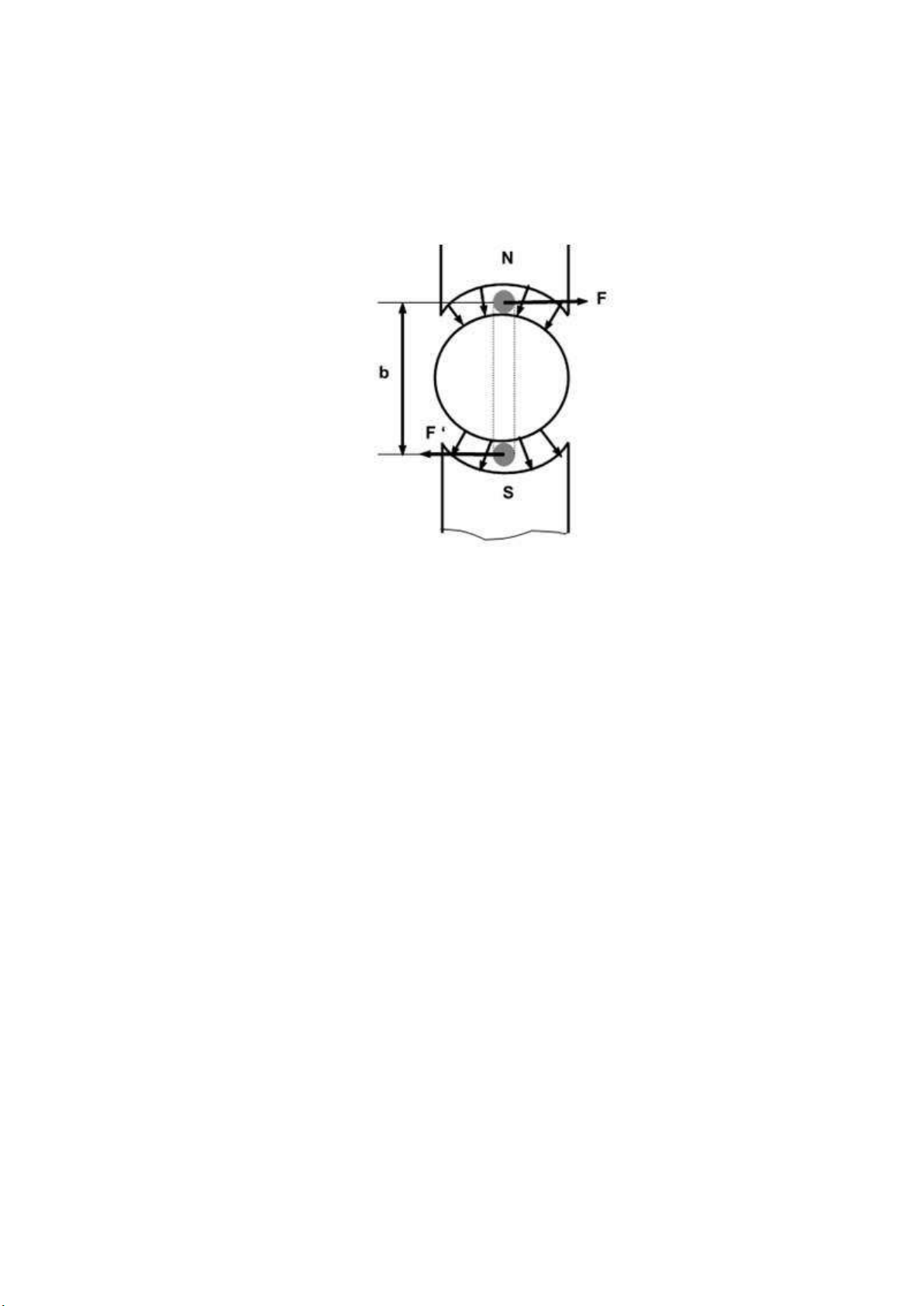
Lực iện từ F sẽ làm khung dây lệch khỏi vị trí cân bằng ban ầu một góc tức sinh
ra moment quay Mq. Moment quay do từ trường của nam châm tương tác với từ
trường của khung dây tạo ra ược tính bằng : w M e q = d
= 2 . F . b = N . B . I . L . b d 2
trong ó : b là bề rộng của khung dây quay 5. và : L . b = S
S là diện tích của khung dây quay 5. Nên : Mq = N . B . S . I
Môment quay này làm phần ộng mang kim o quay i một góc α nào ó và lò xo
cản 7 bị xoắn lại tạo nên môment cản Mc tỷ lệ với góc quay α : Mc = K . α
trong ó : K là ộ cứng của lò xo cản.
Kim của cơ cấu sẽ ứng lại khi môment quay bằng moment cản : Mq = Mc
Tức là : N . B . S . I = K . α Suy ra : α = BSN. . . I K
Với một cơ cấu chỉ thị cụ thể do B, S, N, K là hằng số và ặt : BSN. . = C = const K Suy ra : α = C . I (*)
C gọi là ộ nhạy của cơ cấu o từ iện (A/mm), cho biết dòng iện cần o chạy qua cơ
cấu o ể kim o lệch ược 1 mm hay 1 vạch.
Độ nhạy càng lớn khi Imax càng nhỏ vì góc quay của kim chỉ thị là không ổi (vào
khoảng 105o). Do ó muốn tăng ộ nhạy thì tăng cảm ứng từ B hay tăng diện tích
khung dây hoặc tăng số vòng dây quấn trên khung dây.
Kết luận : qua biểu thức (*) hay còn gọi là phương trình ặc tính của thang o thấy
rằng : góc quay α của kim o tỷ lệ với dòng iện cần o và ộ nhạy của cơ cấu o, dòng
iện và ộ nhay càng lớn thì góc quay càng lớn.
Từ góc α của kim suy ra giá trị của ại lượng cần o. Kết quả hiển thị là giá trị trung bình của ại lượng o. lOMoARcPSD| 38777299
Dụng cụ o kiểu từ iện thường có cơ cấu chỉnh zero ể ưa kim chỉ thị về vị trí “0”
trước khi tiến hành phép o. Thực chất là iều chỉnh vị trí cuộn dây và kim chỉ thị khi không có dòng iện vào.
Quá trình làm nhụt (ổn ịnh vị trí của kim chỉ thị) ược thực hiện nhờ lợi dụng sự xuất
hiện dòng cảm ứng Fuco khi khung dây quay. Từ trường do dòng Fuco tạo ra sẽ hạn
chế sự dao ộng của kim chỉ thị ể nó nhanh chóng ạt vị trí cân bằng. Khi khung dây
ứng im dòng Fuco sẽ mất và như thế cũng không còn lực làm nhụt. Muốn vậy, người
ta thường tạo khung dây bằng cách quấn dây ồng trên một khung bằng nhôm, một
vật liệu dẫn iện rất tốt nhưng lại không có ặc tính từ.
2.2.2.4.- Các ặc tính chung.
+ Cơ cấu chỉ thị từ iện có các ặc tính cơ bản sau :
- Chỉ o ược dòng một chiều tức dòng cần o ưa vào cơ cấu chỉ ược phép theo một
chiều nhất ịnh. Khi ưa dòng vào theo chiều ngược lại kim chỉ thị sẽ bị giật ngược
trở lại và có thể gây hỏng cơ cấu. Vì vậy, phải ánh dấu + (dây màu ỏ) và dấu –
(dây mầu xanh hoặc en) cho các que o. Tính chất này ược gọi là tính phân cực của
cơ cấu chỉ thị nghĩa là chiều quay của kim chỉ thị phụ thuộc vào chiều dòng iện.
Khi o các ại lượng xoay chiều (tần số từ 20Hz ÷ 100KHz) bằng cơ cấu o từ iện
phải chuyển thành ại lượng một chiều và ưa vào cơ cấu theo một chiều nhất ịnh.
Đại lượng xoay chiều AC thường ược biểu thị bởi giá trị hiệu dụng (rms) nên phải
hiệu chỉnh thang o bằng cách nhân kết quả o (là giá trị trung bình) với hệ số 1,1 . Hệ
số này chỉ úng với tín hiệu hình sin, vì vậy với tín hiệu AC ngẫu nhiên bất kỳ thì o
bằng dụng cụ o từ iện dùng mạch chỉnh lưu sẽ có sai số rất lớn.
- Đặc tính của thang o ều.
- Độ nhạy C là hằng số.
- Ưu iểm : ộ chính xác cao, ảnh hưởng của từ trường ngoài không áng kể (do từ
trường là do nam châm vĩnh cửu sinh ra), công suất tiêu thụ nhỏ nên ảnh hưởng
không áng kể ến chế ộ của mạch o, ộ cản dịu tốt, góc quay thang o tuyến tính theo dòng iện.
- Nhược iểm : chế tạo phức tạp, chịu quá tải kém (do cuộn dây của khung dây nhỏ),
ộ chính xác của phép o bị ảnh hưởng lớn bởi nhiệt ộ).
+ Ứng dụng : cơ cấu chỉ thị từ iện dùng ể chế tạo dụng cụ o nhiều thang o và có dải
o rộng, ộ chính xác cao (cấp 0,1 ÷ 0,5) như :
. Đo dòng iện : Miliampe kế, Ampe kế.
. Đo iện áp : Milivolt kê, Volt kế. . Đo iện trở : Ôm kế.
2.2.3.- Cơ cấu iện từ.
Cơ cấu o iện từ còn ược gọi là cơ cấu có miếng sắt di ộng (moving Iron). lOMoARcPSD| 38777299 2.2.3.1.- Ký hiệu.
Hình 2.13.- Ký hiệu Cơ cấu o iện từ. 2.2.3.2.- Cấu tạo.
Cơ cấu o iện từ co hai loại : loại hút và loại ẩy. a.- Cơ
cấu o iện từ loại hút.
Bao gồm hai phần (hình 2.14) :
- Phần tĩnh : là cuộn dây 1, bên trong có khe hở không khí (khe hở làm việc).
Hình 2.14.- Cấu tạo cơ cấu o iện từ loại hút. lOMoARcPSD| 38777299
- Phần ộng : lá thép 2 ược gắn lên trục quay 5, lá thép có thể quay tự do trong khe
hở làm việc của cuộn dây. Trên trục quay có gắn : bộ cản dịu không khí 4, kim chỉ
thị 6, ối trọng 7. Ngoài ra còn có lò xo cản 3, bảng khắc ộ 8.
b.- Cơ cấu o iện từ loại lực ẩy. Hình 2.15.
Gồm : hai miếng sắt : lá thép di ộng 3 ược gắn chặt với trục quay 4, lá thép
cố ịnh 2 ược gắn với vách trong của nòng cuộn dây. Khi có dòng iện chạy qua sẽ từ
hóa hai lá thép có cùng cực tính cho nên hai lá thép sẽ ẩy nhau, khi ó lá thép di ộng sẽ di chuyển.
Hình 2.15.- Cấu tạo cơ cấu o iện từ loại lực ẩy.
2.2.3.3- Nguyên lý làm việc.
Cơ cấu iện từ loại lực hút và loại lực ẩy có cùng nguyên lý làm việc.
Khi cho dòng iện chạy qua cuộn dây 1 (phần tĩnh), cuộn dây trở thành nam
châm iện hút lá thép 2 (lá thép di ộng) vào khe hở làm việc trong cuộn dây xuất hiện
moment quay ược xác ịnh : w M e q = d lOMoARcPSD| 38777299 d
Năng lượng từ trường tích lũy trong cuộn dây ược xác ịnh : We = . L . I2
trong ó : L là iện cảm của cuộn dây,
Từ trường trong lòng cuộn dây sẽ từ hóa các lá thép. Sự phân cực các lá thép tạo
thành những nam châm cùng cực có tác dụng ẩy lá thép ộng. Lúc này làm quay lá thép di ộng quanh trục.
Khi lá thép bị hút vào cuộn dây sẽ tổn hao một năng lượng từ trường là dWe, năng
lượng này ược chuyển thành cơ năng tác dụng lên lá thép Mq . dα . Ta có : dWe = Mq . dα d ( . L . I2 ) = Mq . dα d 1. .L I 2 Suy ra : Mq = 2 = 1 . I2 . dL d 2 d
Tại vị trí cân bằng, có : Mq = Mc → α = 1 . dL . I2 2.D d
là phương trình thể hiện ặc tính của cơ cấu chỉ thị iện từ.
Vậy, góc quay tỷ lệ với bình phương dòng iện.
Do ó, thang o của cơ cấu o iện từ có các vạch chia không ều nhau.
2.2.3.4.- Các ặc tính chung.
. Góc quay α tỷ lệ với bình phương của dòng iện, tức là không phụ thuộc vào chiều
của dòng iện nên có thể o cả mạch xoay chiều hoặc mạch một chiều.
. Thang o không ều, có ặc tính phụ thuộc vào tỷ số
dL là một ại lượng d phi tuyến.
. Cản dịu thường bằng không khí hoặc cảm ứng.
. Ưu iểm : cấu tạo ơn giản, tin cậy, chịu ược quá tải lớn (vì có thể chế tạo cuộn dây
phần tĩnh với tiết diện dây lớn).
. Nhược iểm : ộ chính xác không cao nhất là khi o ở mạch một chiều sẽ bị sai số (do
hiện tượng từ trễ, từ dư …), ộ nhạy thấp, bị ảnh hưởng của từ trường ngoài (do từ
trường của cơ cấu yếu khi dòng nhỏ). lOMoARcPSD| 38777299
. Ứng dụng : ược sử dụng ể chế tạo ampe kế, volt kế trong mạch xoay chiều tần số
công nghiệp (tần số lên ến 10.000 Hz) với ộ chính xác thấp (cấp 1 ÷ 2) . Ít dùng
trong các mạch có tần số cao.
2.2.4.- Cơ cấu o iện ộng.
Là cơ cấu o phối hợp giữa cơ cấu o từ iện (khung quay mang kim chỉ thị) và cơ cấu
o iện từ (cuộn dây cố ịnh tạo từ trường cho khung quay). 2.2.4.1.- Ký hiệu.
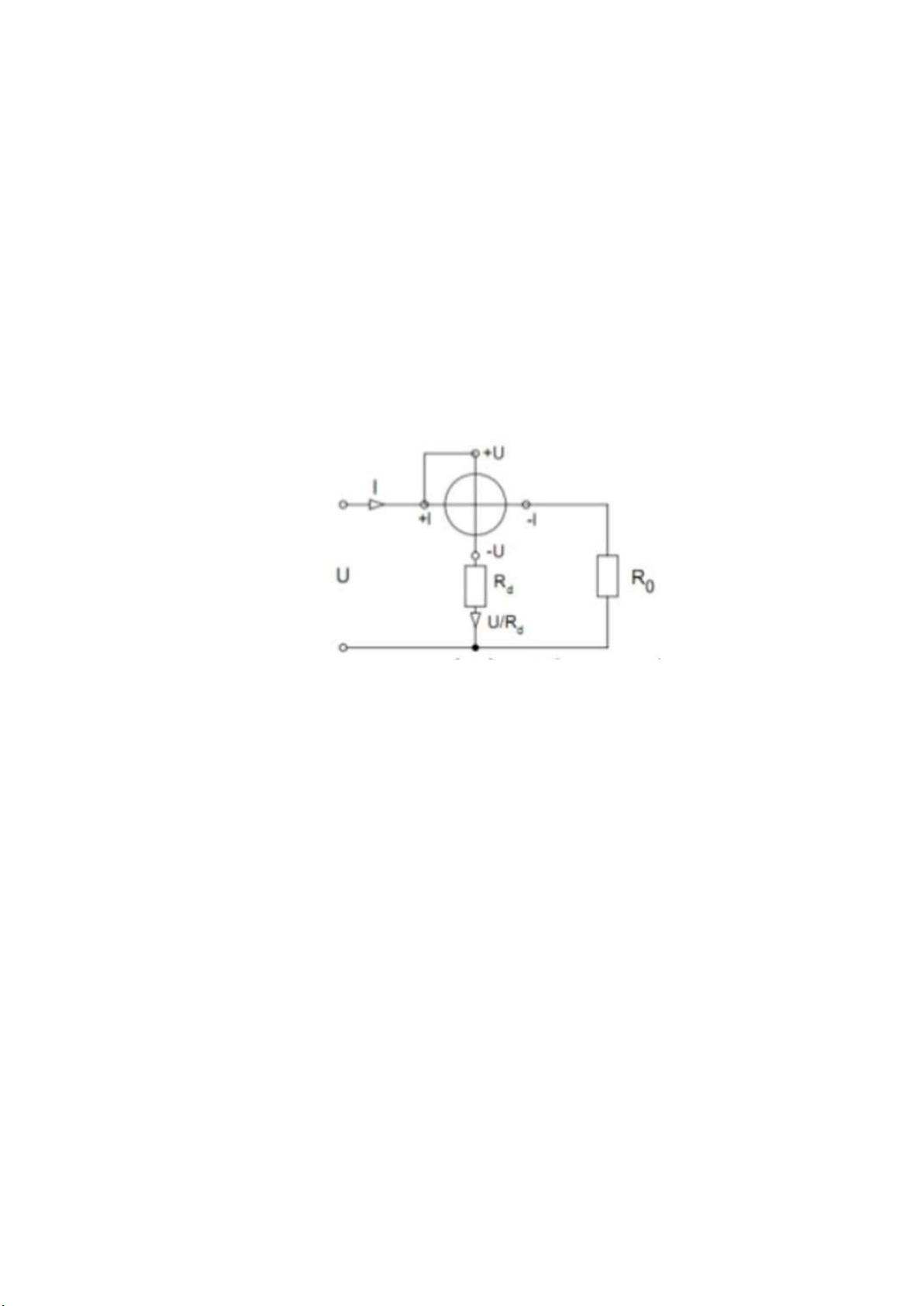
Hình 2.16.- Ký hiệu Cơ cấu o iện ộng. 2.2.4.2.- Cấu tạo. a) b) c)
Hình 2.17.- Cấu tạo cơ cấu o iện ộng.
a) Sơ ồ giản lược ; b) Cấu tạo không gian cơ cấu o iện ộng ; c) Cấu tạo cơ cấu chỉ thị iện ộng. lOMoARcPSD| 38777299
Bao gồm hai phần (hình 2.17) : -
Phần tĩnh gồm : cuộn dây 1 còn gọi là cuộn kích thích, ược chia thành
hai phần và mắc nối tiếp nhau (quấn theo cùng chiều) ể tạo thành nam châm iện ể
tạo ra từ trường ều khi có dòng iện chạy qua. Hai phần cuộn dây ược bố trí cách
nhau một khoảng ể cuộn dây ộng 2 nằm trong khoảng này và chịu ảnh hưởng của từ
trường do cuộn dây tĩnh tạo ra. Trục quay chui qua khe hở giữa hai phần cuộn dây tĩnh. -
Phần ộng gồm : một khung dây 2 nằm trong lòng cuộn dây tĩnh 1(quay
trong từ trường ược tạo ra bởi cuộn tĩnh). Hình dáng cuộn dây có thể tròn hay vuông.
Khung dây 2 ược gắn với trục quay, trên có lò xo cản, bộ phận cản dịu và kim chỉ thị.
Các cuộn dây có lõi làm bằng vật liệu có ộ từ thẩm cao ể tạo ra từ trường
mạnh. Cả phần ộng và phần tĩnh ược bọc kín bằng màn chắn từ ể ngăn chặn ảnh
hưởng của từ trường ngoài làm sai lệch giá trị o.
Thông thường cuộn dây di ộng không có lõi sắt non (như ở cơ cấu từ iện) mà
là lõi không khí cho nên tránh ược hiện tượng từ trễ và dòng iện xoáy. Khi ược sử
dụng ể o dòng iện xoay chiều cuộn dây phần tĩnh và phần ộng ược nối với nhau như
thế nào thì phụ thuộc vào sự sử dụng của cơ cấu o.
2.2.4.3- Nguyên lý làm việc.
Khi có dòng iện I1 chạy qua cuộn dây tĩnh 1, trong lòng cuộn dây tĩnh xuất
hiện từ trường, từ trường này tác ộng lên dòng iện I2 chạy trong khung dây 2 (cuộn
dây ộng). Giữa các cuộn dây sẽ có các lực tương hỗ tạo nên moment quay làm cho
cuộn dây ộng quay i một góc α.
a.- Khi có dòng iện một chiều i vào cuộn dây tĩnh.
Môment quay ược xác ịnh : Mq = d we = d M 12 . I1 . I2 d d Mq = Kq . I1 . I2
Khi mắc các cuộn dây nối tiếp nhau, tức I1 = I2 = I thì Mq = Kq . I2 Ở
vị trí cân bằng môment quay bằng môment cản : Mq = Mc → M d 12 . I1 . I2 = K . α d
trong ó : K là ộ cứng của lò xo cản.
Suy ra : α = 1 . d M 12 . I1 . I2 K d lOMoARcPSD| 38777299
Cần chú ý rằng ể có lực ẩy làm quay phần ộng thì chiều dây quấn trên phần ộng
phải ngược với chiều quấn dây trên hai phần của cuộn kích thích.
Do góc lệch không tỷ lệ tuyến tính với dòng cần o nên thang o cơ cấu iện ộng
là thang o không ều. Giá trị o ược là giá trị trung bình bình phương (rms).
b.- Khi dòng iện xoay chiều i vào cuộn dây tĩnh.
Môment quay ược xác ịnh : Mq = d we = d M 12 . I1 . I2 d d
Do có quán tính nên phần ộng không kịp thay ổi theo giá trị tức thời. Cho nên,
thực tế thường lấy giá trị trung bình trong một chu kỳ tương ứng với giá trị hiệu dụng RMS. 1 T Ta có : Mq = T . M 0 qt.dt M Suy ra : M 12 q = d . I1 . I2 . cosφ d Mq = Kq . I1 . I2 . cosφ
Với φ góc lệch pha giữa hai dòng iện I1 và I2 .
Ở vị trí cân bằng môment quay bằng môment cản : Mq = Mc → M d 12 . I1 . I2 . cosφ = K . α d
Suy ra : α = 1 . d M 12 . I1 . I2 . cosφ K d k
Hay : α = q . I2 = K . I2 k p
Năng lượng từ trường trong hai cuộn dây phần tính và phần ộng là : W 2 2
tt = . L1 . I1 + . L2 . I2 + M . I1 . I2
M là hệ số tương hỗ giữa hai cuộn dây phần tĩnh và phần ộng thay ổi theo vị
trí của cuộn dây phần ộng ối với cuộn dây phần tĩnh tức thay ổi theo góc quay α . lOMoARcPSD| 38777299
Độ biến thiên dWtt = Mq . dα
2.2.4.4.- Các ặc tính chung.
Cơ cấu o iện ộng có ưu iểm và nhược iểm của cơ cấu o từ iện và cơ cấu o iện từ.
- Có thể dùng cả trong mạch iện một chiều và xoay chiều.
- Góc quay α phụ thuộc tích (I ) nên thang o không ều. 1.I2
- Trong mạch iện xoay chiều α phụ thuộc góc lệch pha ψ giữa hai dòng
iện nên có ộ nhạy kém và tiêu thụ công suất khá lớn nên chủ yếu dùng làm Watt kế o công suất.
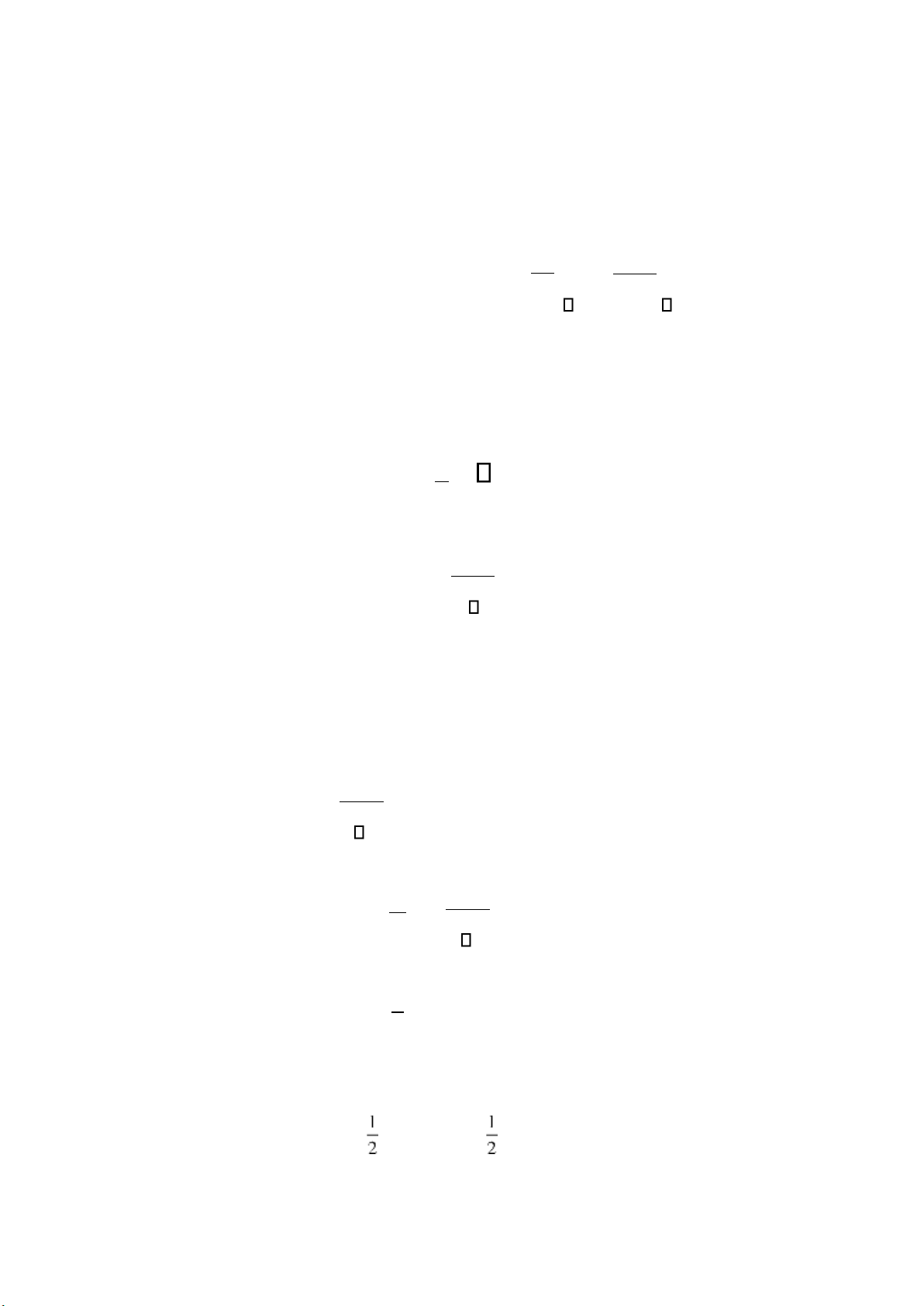
Sơ ồ mắc dây ể o công suất xem hình 2.18.
Hình 2.18.- Sơ ồ mắc dây ể o công suất.
- Ưu iểm cơ bản : có ộ chính xác cao khi o trong mạch iện xoay chiều.
- Nhược iểm : công suất tiêu thụ lớn nên không thích hợp trong mạch
công suất nhỏ, chịu ảnh hưởng của từ trường ngoài nên muốn làm việc tốt phải
có bộ phận chắn từ. Độ nhạy thấp vì mạch từ yếu.
- Ứng dụng : dùng ể chế tạo :
. Ampe kế, volt kế, watt kế một chiều và xoay chiều với tần số công nghiệp.
. Đồng hồ o hệ số công suất cosφ hay góc lệch giữa các pha.
. Trong mạch tần số cao phải có mạch bù tần số ( o ược dải tần ến 20 KHz).
Lưu ý : Chiều quay của cơ cấu o iện ộng (sắt iện ộng) ược xác ịnh trước khi hoạt
ộng với dòng iện xoay chiều. Như vậy, khi kim chỉ thị của cơ cấu o bị lệch ngược
thì phải hoán ổi cực tính của cuộn dây ể kim chỉ thị quay thuận.
2.2.5.- Cơ cấu cảm ứng. 2.2.5.1.- Ký hiệu. lOMoARcPSD| 38777299
Hình 2.19.- Ký hiệu Cơ cấu o cảm ứng.
2.2.5.2.- Cấu tạo.
Bao gồm hai phần (hình 2.20) :
- Phần tĩnh gồm có hai cuộn dây 2, 3 quấn trên mạch từ (lõi thép kỹ
thuật) ể tạo ra nam châm iện. Khi có dòng iện chạy qua các cuộn dây sẽ sinh ra
từ trường móc vòng qua mạch từ và phần ộng. Số lượng nam châm ít nhất là hai.
Hình 2.20.- Cấu tạo cơ cấu cảm ứng.
- Phần ộng là một ĩa kim loại 1 làm bằng nhôm, gắn vào trục quay 4 quay
trên trụ quay 5 và trên có mang kim chỉ thị.
2.2.5.3- Nguyên lý làm việc.
Dựa trên sự tác dụng tương hỗ giữa từ trường xoay chiều ( ược tạo ra bởi dòng
iện trong phần tĩnh) và dòng iện xoảy tạo ra trong ĩa của phần ộng, do ó cơ cấu này
chỉ làm việc với mạch iện xoay chiều.
Khi dòng iện I1 , I2 i vào các cuộn dây tĩnh sẽ sinh ra các từ thông Φ1 , Φ2 (các
từ thông này lệch pha nhau góc ψ bằng góc lệch pha giữa các dòng iện tương ứng),
từ thông Φ1 , Φ2 cắt ĩa nhôm 1 (phần ộng) và gây sự xuất hiện trong ĩa nhôm các sức
iện ộng tương ứng E1 , E2 (lệch pha với Φ1 , Φ2 góc π/2) làm xuất hiện các dòng iện
xoáy Ix1 , Ix2 (lệch pha với E1 , E2 góc α1 , α2).
Các từ thông Φ1 , Φ2 tác ộng tương hỗ với các dòng iện Ix1 , Ix2 nên sinh ra các
lực F1 , F2 và các moment quay tương ứng làm quay ĩa nhôm. Môment ược xác ịnh :
Mq = C . f . Φ1 . Φ2 . sinφ
trong ó : C là hằng số của cơ cấu o cảm ứng lOMoARcPSD| 38777299
f là tần số của dòng iện I1 , I2
φ là góc lệch pha giữa I1 , I2 . Hay : Mq = K . U . I . cosφ
Môment cản tỷ lệ với tốc ộ quay của ĩa nhôm : Mc = K' . n
Đĩa nhôm quay ều khi môment quay cân bằng với môment cản : Mq = Mc Hay : K . P = K' . n K Suy ra : n = ' . P K
Để có ược từ thông lớn cần phải có từ trở của mạch từ nhỏ, ngoài ra còn phải chịu
ược quá tải và chống lại từ trường bên ngoài. Hơn nữa, còn phải ghi nhận nhiệt ộ
cũng ảnh hưởng ến iện trở của dòng iện xoáy trên ĩa và cuộn dây. Do ó cơ cấu này có sai số do nhiệt ộ.
Tóm lai : . Tốc ộ quay của ĩa nhôm tỷ lệ với công suất của phụ tải.
. Khi Mq > Mc ĩa nhôm quay nhanh.
. Khi Mq < Mc ĩa nhôm quay chậm.
2.2.5.4.- Các ặc tính chung.
. Điều kiện ể có môment quay là ít phải có hai từ trường.
. Môment quay ạt giá trị cực ại nếu góc lệch pha ψ giữa hai từ trường Φ1 , Φ2 bằng π/2.
. Môment phụ thuộc tần số của dòng iện tạo ra các từ trường.
. Chỉ làm việc trong mạch iện xoay chiều.
. Ưu iểm : có môment lớn, cấu tạo chắc chắn, khả năng chịu tải cao.
. Nhược iểm : môment phụ thuộc tần số nên cần phải ổn ịnh tần số, ộ chính xác thấp
do có sai số và do từ trễ nên chủ yếu dung o công suất xoay chiều.
. Ứng dụng : chủ yếu dùng chế tạo công tơ o năng lượng, có thể o tần số.
2.2.6.- Cơ cấu chỉ thị tự ghi. Trong kỹ thuật o lường vô tuyến iện các thiết bị chỉ
thị tự ghi là chủ yếu là máy hiện sóng với phần chỉ thị là ống phóng tia iện tử - CRO (Cathode Ray Osciloscope).
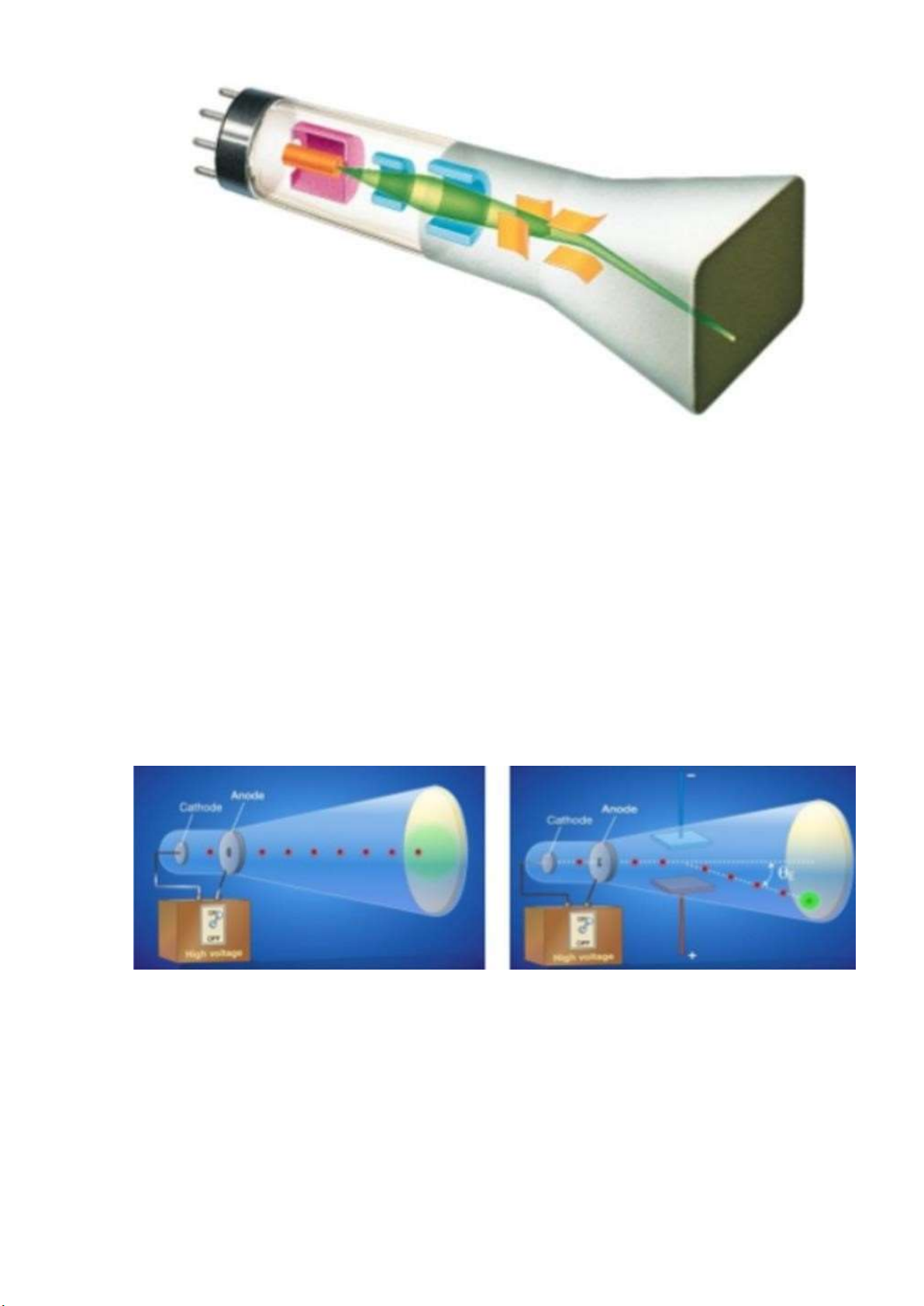
Cấu tạo cơ bản của một ống phóng tia iện tử CRO có nguyên tắc gần giống
như ống phóng chân không CRT (Cathode Ray Tube) : một ống chân không với các
hệ thống iện cực và màn huỳnh quang.
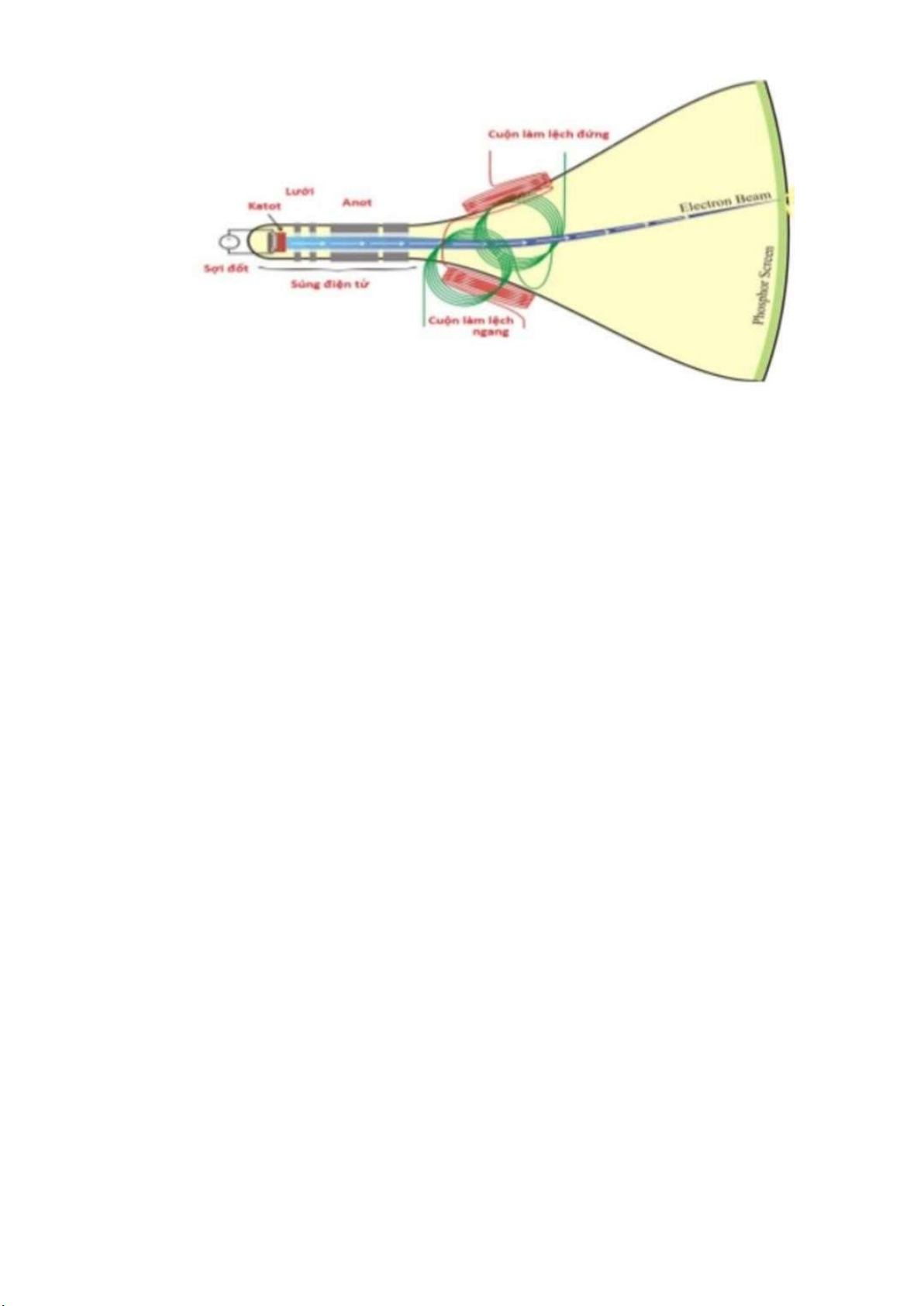
Chùm electron do catot phát ra sẽ ược hướng tới màn hình theo sự iều khiển
từ bên ngoài và làm phát sáng lớp photpho tại iểm chúng ập vào (xem hình 2.21). lOMoARcPSD| 38777299
Hình 2.21.- Cấu tạo cơ bản của một ống phóng tia iện tử CRO.
2.2.6.1.- Cấu tạo của một ống phóng tia iện tử CRO : Bao gồm :
a.- Phần ba cực (triot) : gồm Catot, lưới và Anot (còn gọi là súng iện tử). -
Catot : làm bằng Niken hình trụ, áy phẳng phủ oxit ể phát ra iện tử.
Một sợi ốt nằm bên trong Catot có nhiệm vụ nung nóng Catot ể tăng cường thêm số
iện tử phát xạ. Sợi ốt có iện thế khoảng 6,3 V nhưng Catot có iện thế xấp xỉ - 2 kV. -
Lưới : là một cốc Niken có lỗ ở áy bao phủ lấy Catot. Thế của lưới xấp
xỉ - 2 kV ến - 2,05 kV ể iều khiển dòng electron từ Catot hướng tới màn hình. Khi
thế của lưới thay ổi sẽ iều chỉnh lượng electon bắn ra khỏi Catot, tức là làm cho iểm
sáng trên màn hình có ộ chói khác nhau. Vì vậy thành phần iều khiển thế của lưới
còn gọi là thành phần iều khiển ộ chói. -
Anot : gồm từ 2 ến 3 Anot.
Anot ầu tiên có thế dương hơn Catot ể hút và gia tốc cho chùm tia iện tử, Anot
tiếp theo sẽ hội tụ chùm tia iện tử trong quá trình bay về phía màn hình, vì thế nó
còn ược gọi là các iện cực iều tiêu hay thấu kính iện tử. vì các electron cùng mang
iện tích âm nên chúng có xu hướng ẩy nhau, nghĩa là chùm tia iện tử sẽ loe rộng ra
và khi ập vào màn huỳnh quang sẽ tạo ra một vùng sáng, nghĩa là hình ảnh hiển thị
bị nhòe. Nhờ có các iện cực iều tiêu, chùm tia electron sẽ bị hội tụ lại làm cho các
electron hướng tới 1 iểm nhỏ trên màn hình, tức là hình ảnh hiển thị ược rõ nét (xem hình 2.22). lOMoARcPSD| 38777299
Hình 2.22.- Hệ thống Anot gia tốc iều chỉnh ộ hội tụ của chùm tia iện tử.
b.- Hệ thống làm lệch (hay còn gọi là lái tia).
Khi các tấm làm lệch ngang và ứng ược tiếp ất hoặc không nối thì chùm
electron có thể i qua chúng và ập vào tâm màn hình (xem hình 2.23.a).
Khi ặt iện áp lên các tấm làm lệch thì các electron sẽ bị hút vào tấm có thế
dương và bị ẩy ra xa khỏi tấm có thế âm. Để tác dụng của các iện áp làm lệch +/-
gây ra những khoảng lệch như nhau thì thế +E/2 phải ưa vào một tấm và thế -E/2 i
vào tấm còn lại (với E là thế chênh lệch giữa hai tấm) – xem hình 2.23.b. Để xác ịnh
vị trí của iểm hiển thị trên màn hình người ta dùng 1 cặp làm lệch ứng (Y) và một cặp làm lệch ngang (X). a) b)
Hình 2.23.- a) Tia iện tử bay thẳng và b) Tia iện tử bị lệch i dưới tác ộng của tấm làm lệch.
. Điện áp cần thiết ể tạo ra 1 vạch chia ộ lệch ở màn hình ược gọi là hệ số làm
lệch ứng của ống, ơn vị là V/cm.
. Độ lệch do 1 V tạo ra trên màn hình gọi là ộ nhạy lái tia, ơn vị là cm/V. lOMoARcPSD| 38777299
Ngoài ra ể tránh ảnh hưởng của iện trường giữa các cặp lái tia ôi khi thường
sử dụng một màn chắn cách iện giữa cặp lái tia ngang và cặp lái tia ứng.
c.- Màn hình của ống phóng tia iện tử CRO.
Màn hình của CRO ược mạ một lớp Photpho ở mặt trong của ống, khi chùm
tia electron ập vào màn hình thì các electron bên trong lớp mạ sẽ chuyển lên mức
năng lượng cao và khi trở về trạng thái bình thường sẽ phát ra ánh sáng. Sự lưu ánh
sáng của photpho khá dài (từ vài ms ến vài s nên mắt người mới nhìn thấy hình dạng
sóng hiện lên liên tục như ảnh tĩnh. Lớp than chì có tác dụng thu hồi các electron
thữ cấp vì nếu không thu hồi lại thì sự tích tụ của các electron có thể tạo ra một thế
âm ở màn hình và thế âm này sẽ chống lại sự di chuyển của dòng electron tiến ến màn hình.
Ngoài ra, có thể sử dụng màng nhôm ể thu góp electron và dẫn xuống ất.
Màng nhôm này còn có tác dụng tăng cường ộ chói của lớp sáng do phản xạ ánh
sáng về phía màn hình thủy tinh và tản nhiệt cho màn hình.
Đường xoắn ốc làm bằng chất có iện trở cao kết tủa trong ống thủy tinh từ
chỗ tấm lái tia tới màn hình có tác dụng gia tốc cho electron sau khi làm lệch ể có
ược ộ chói cần thiết (nếu gia tốc trước lúc làm lệch thì sẽ làm giảm khả năng iều
chỉnh dòng electron của các tấm làm lệch).
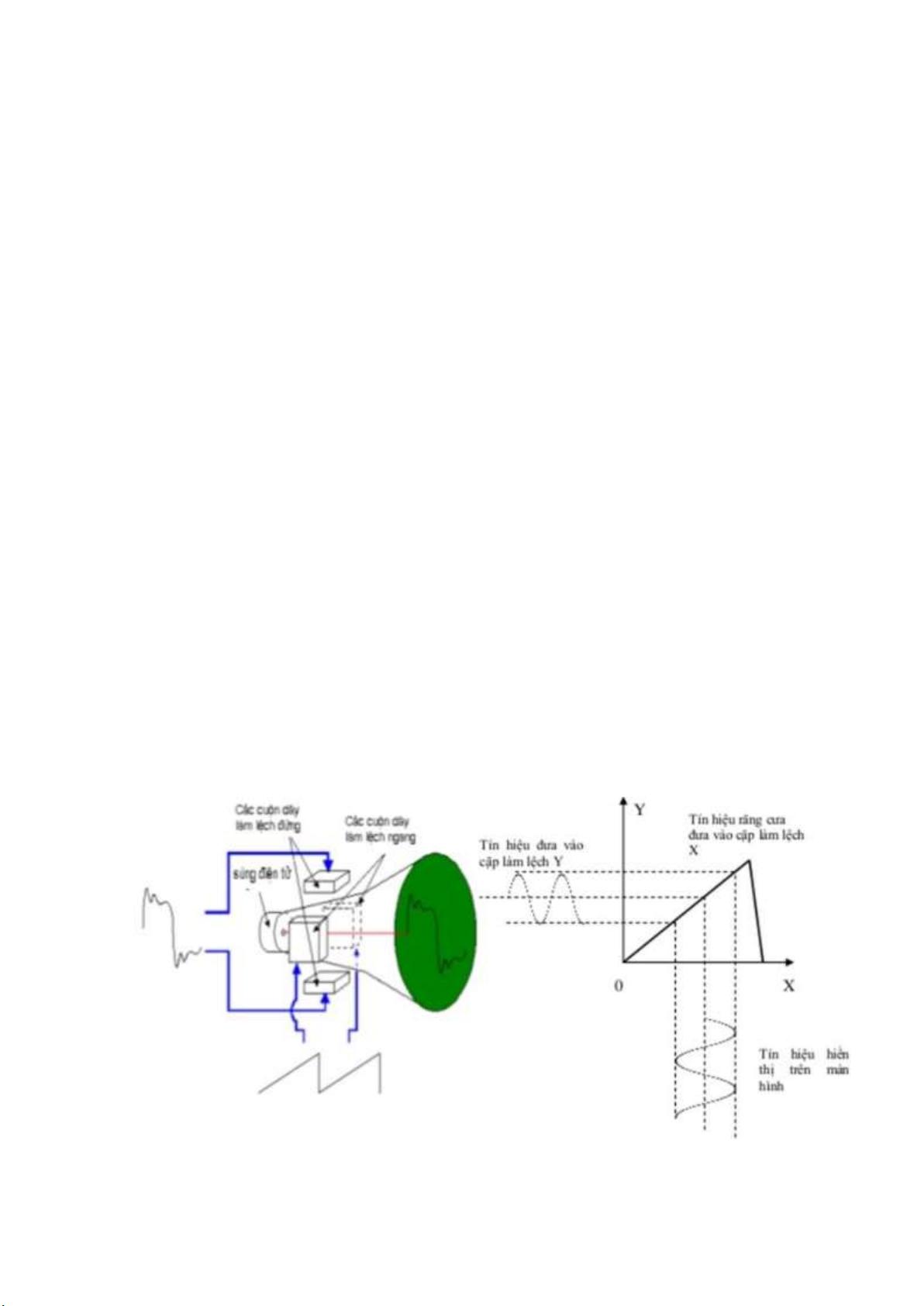
2.2.6.2.- Nguyên tắc hiện hình của ống phóng tia iện tử CRO.
Catot phát ra electron và ược các hệ thống iện cực iều khiển ể có số lượng hạt,
vận tốc và ộ hội tụ cần thiết. Hệ thống làm lệch sẽ làm cho chùm tia iện tử di chuyển
trên màn hình theo phương ngang và phương ứng ể hiện dạng của tín hiệu.
Ở chế ộ hiển thị dạng sóng thông thường tín hiệu cần hiển thị ược ưa vào cặp
làm lệch ứng, còn một tín hiệu dạng răng cưa ược ưa vào cặp làm lệch ngang (xem hình 2.24).
Hình 2.24.- Nguyên tắc hiện hình của ống phóng tia iện tử CRO. lOMoARcPSD| 38777299
Khi ó với tần số răng cưa (còn gọi là tần số quét) phù hợp trên màn hình sẽ
có một sóng ứng của dạng sóng cần hiển thị.
2.2.7.- Bộ chuyển ổi tín hiệu.
Trên sơ ồ hình 2.1 cho thấy ó là sơ ồ khối cơ bản của một thiết bị o lường mà
cơ cấu chỉ thị là dạng cơ. Theo thời gian với sự tiến bộ của kỹ thuật ã dần bổ sung
từ chỉ thị dạng cơ (analog) sang cơ cấu chỉ thị tự ghi, tiếp ến là cơ cấu chỉ thị hiện số (digital).
Mặt khác, công nghệ ngày càng phát triển nên việc sử dụng các phương pháp
o lường với các cảm biến hiện ại là iều rất cần thiết.
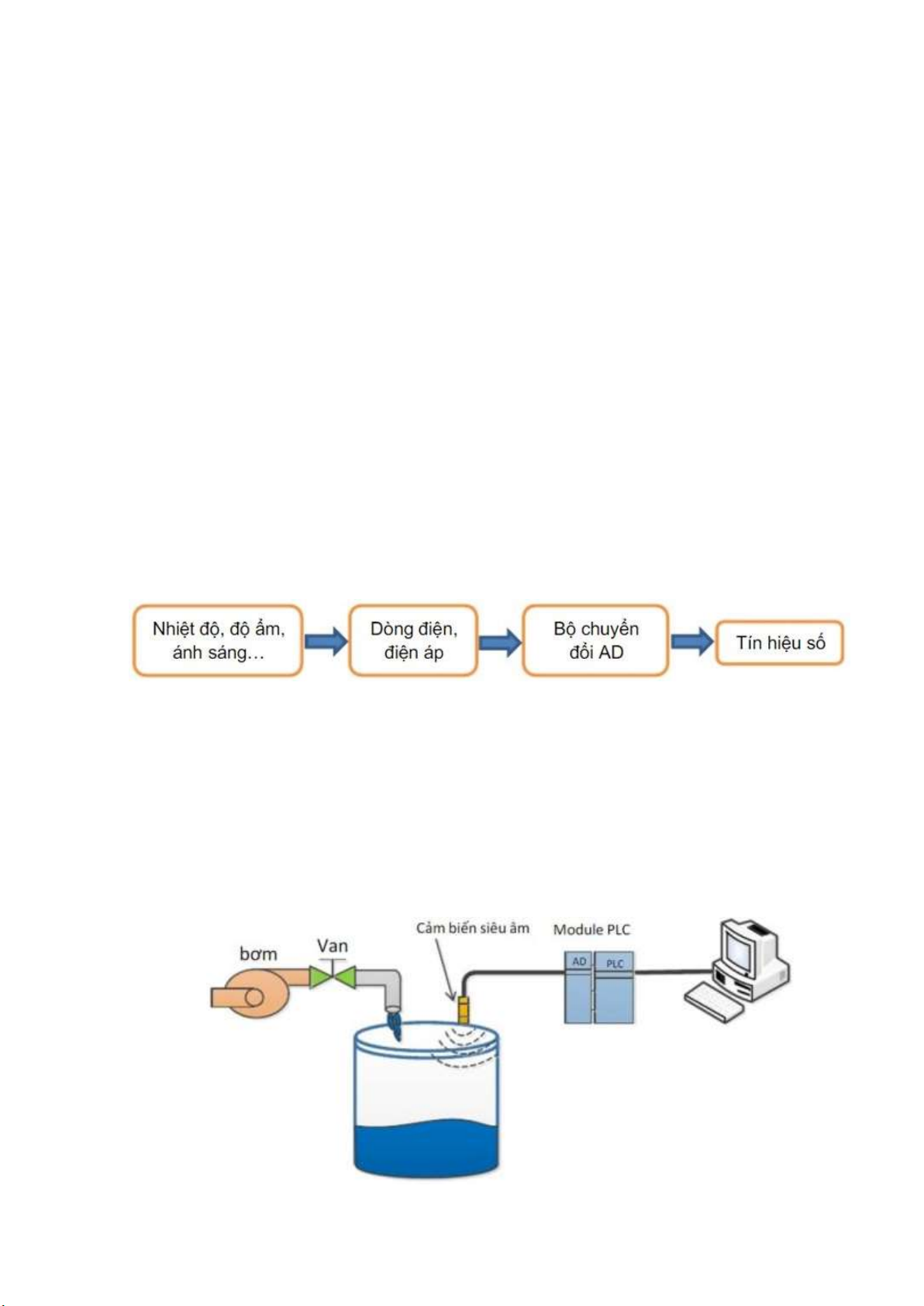
Hầu hết các ại lượng vật lý như : nhiệt ộ, ộ ẩm, lưu lượng, áp suất, âm thanh,
ánh sáng… ược gọi là ại lượng không iện, ó là các tín hiệu tương tự (analog). Để
xác ịnh chúng dùng các loại cảm biến ể o các tín hiệu này, thông thường ầu ra của
các cảm biến tín hiệu ó ã chuyển sang dạng tín hiệu iện
(iện trở, iện dung, iện cảm, dòng iện…) rồi ưa về mạch o và chuyển ổi AD (khối xử lý). (hình 2.25).
Trong khi ó các bộ vi xử lý hoặc PLC chỉ có thể ọc ược tín hiệu số (Digital).
Để giải quyết vấn ề này phải sử dụng bộ chuyển ổi AD (chuyển ổi tương tự - số) ể
chuyển các tín hiệu tương tự mà ầu ra của cảm biến ưa ra sang tín hiệu số ể xử lý.
Hình 2.25.- Sơ ồ khối thiết bị o lường hiện ại.
Khối xử lý : có chức năng nhận các tính hiệu từ khối cảm biến, thực hiện các
xử lý ể chuyển ổi các tín hiệu ó sang dạng tín hiệu tiêu chuẩn trong lĩnh vực o lường
với tín hiệu ngõ ra là iện áp 4 ÷ 20 mA (tín hiệu thường ược sử dụng nhất) hoặc 0 ÷
5 VDC hoặc 0 ÷ 10 VDC hoặc 1 ÷ 5 VDC…
Để làm rõ thêm, hãy xem việc o mực nước trong bồn (hình 2.26) :
Hình 2.26.- Hệ thống o mức nước trong bồn. lOMoARcPSD| 38777299
Để o mức nước trong bồn sử dụng cảm biến sóng siêu âm. Tín hiệu ầu ra cảm
biến có dạng dòng iện. Sử dụng bộ chuyển ổi ể ưa tín hiệu dòng iện thành tín hiệu
số rồi ưa vào PLC ể xử lý, xác ịnh mức nước trong bồn.
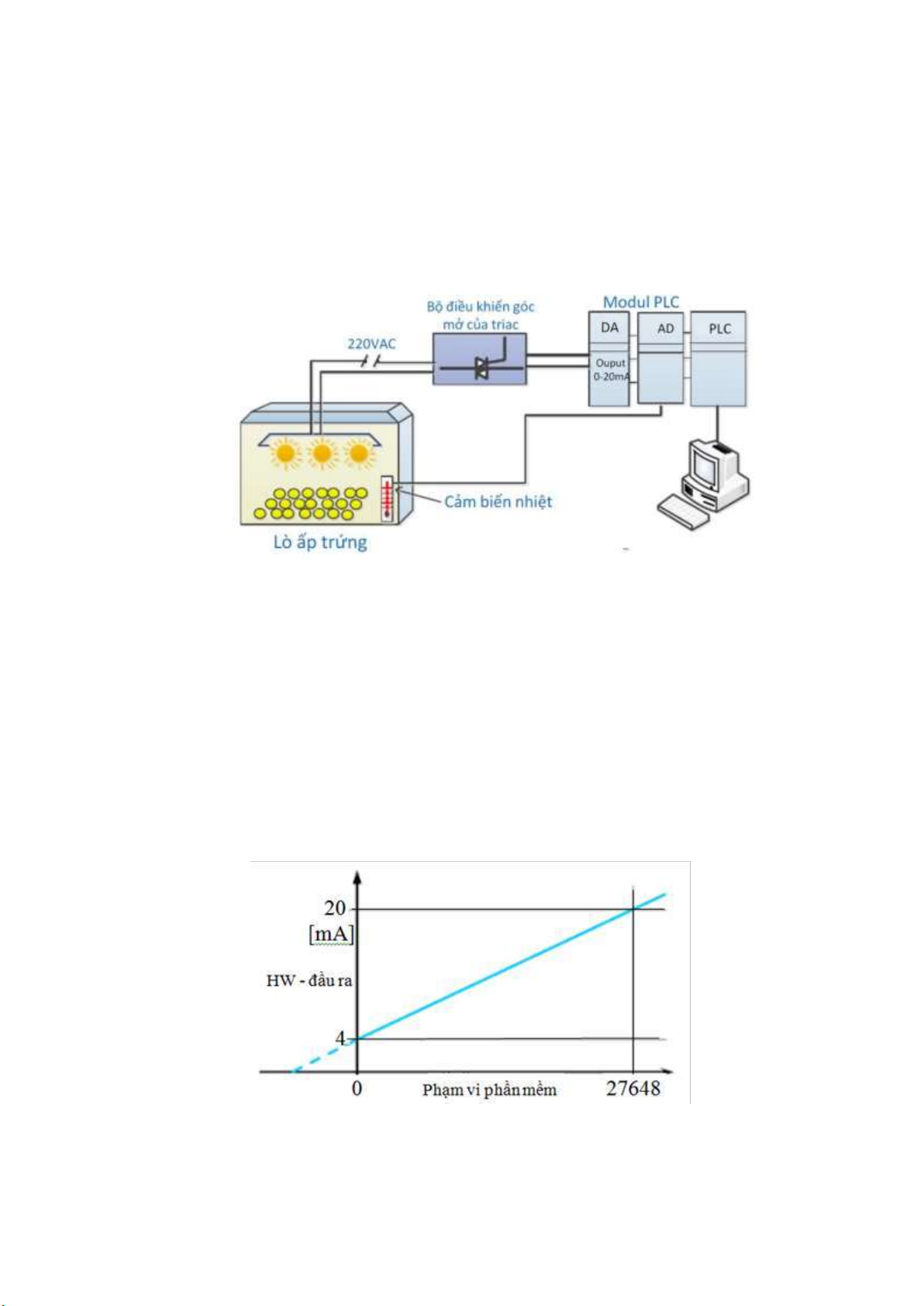
Các vi xử lý hoặc PLC sẽ xuất ra tín hiệu iều khiển ể iều khiển bơm cấp nước
cho bồn khi mức nước trong bồn giảm thấp. Tuy nhiên tín hiệu iều khiển lúc này là
tín hiệu số, còn bơm lại hoạt ộng theo tín hiệu tương tự. Do ó cần có thêm một bộ
chuyển ổi DA (chuyển ổi số - tương tự) ể chuyển ổi tín hiệu số thành tín hiệu tương
tự (trong hình 2.27 mô tả ầy ủ bộ chuyển ổi AD và bộ chuyển ổi DA).
Hình 2.27.- Hệ thống o lường và iều khiển với các bộ chuyển ổi AD và DA.
Một số vấn ề cần ặt ra là : tại sao lại dùng tín hiệu 4 ÷ 20 mA mà không dùng
tín hiệu 0 ÷ 20 mA hay tại sao phải dùng tín hiệu dòng analog 4 ÷ 20 mA mà không
phải tín hiệu áp 0 ÷ 10 V hay tín hiệu iện áp 0 ÷ 5 V ? Tại sao dùng tín hiệu 4 ÷
20 mA 2 dây mà không dùng tín hiệu 4 ÷ 20 mA 3 dây ?
Hầu như các thiết bị như : cảm biến, bộ chuyển ổi, PLC, bộ ọc tín hiệu, card
giao tiếp… tất cả ều dần chuyển về tín hiệu 4 ÷ 20 mA. Hãy xem sơ ồ biểu thị tín
hiệu dòng 4 ÷ 20 mA trên hình 2.28.
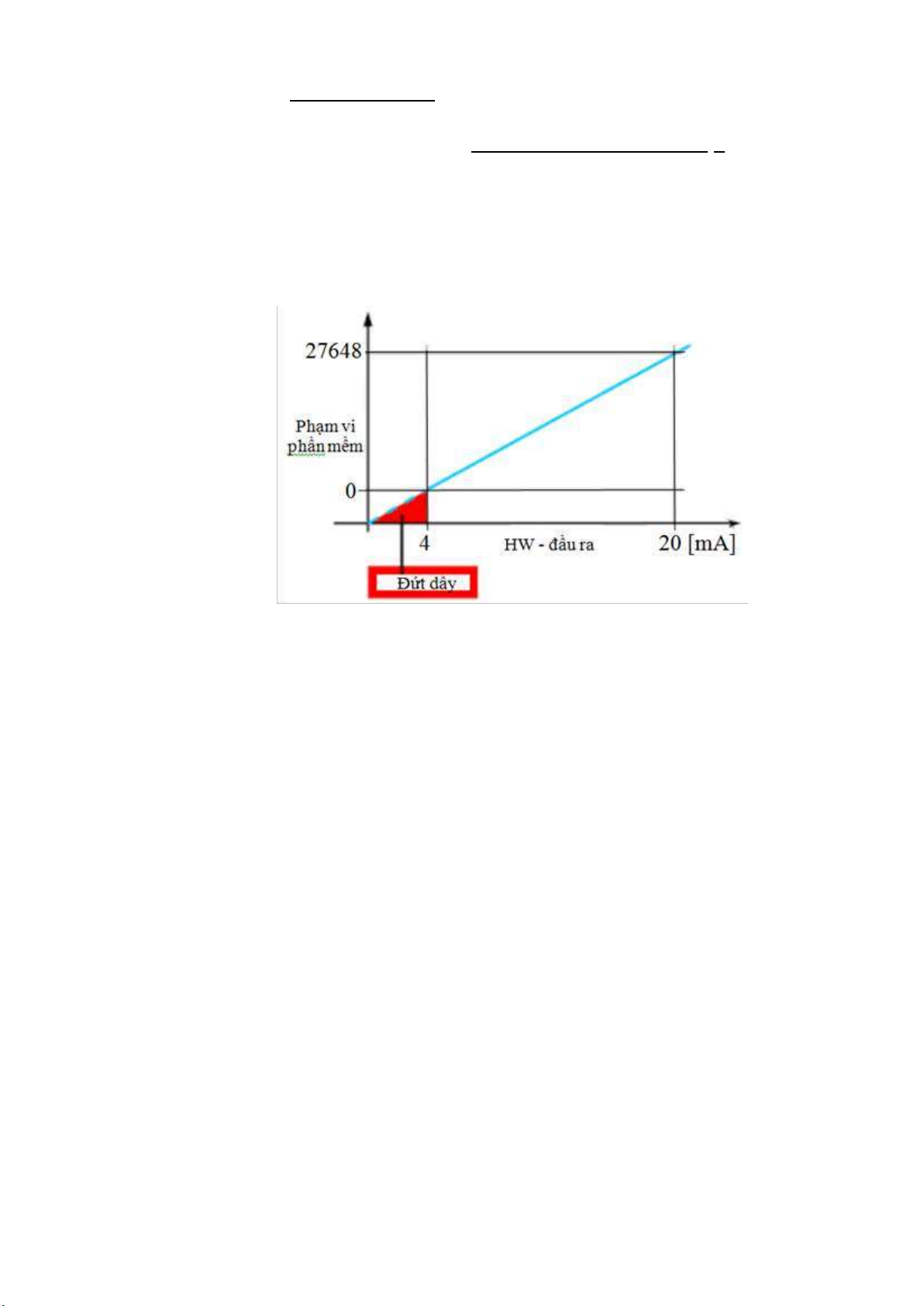
Hình 2.28.- Sơ ồ biểu thị Tín hiệu dòng 4 ÷ 20 mA.
Nhìn sơ ồ 2.28 biểu thị tín hiệu dòng 4 ÷ 20 mA chúng ta thấy giá trị Min bắt
ầu của tín hiệu là 4mA và giá trị kết thúc của tín hiệu là 20mA. Tín hiệu 4 ÷ 20 mA
biểu thị cho một giá trị o ược nào ó của thiết bị o lường hoặc thiết bị iều khiển. lOMoARcPSD| 38777299
Gỉa sử một cảm biến áp suất có khoảng o 0 ÷ 100 bar và có tín hiệu về là 4 ÷
20 mA hay một cảm biến nhiệt ộ có khoảng o 0 ÷ 100 oC hay cảm biến nhiệt ộ có
dãy o 0 ÷ 1000 oC. Như vậy khi i qua bộ chuyển ổi tín hiệu nhiệt ộ cũng ều ưa tín
hiệu về 4 ÷ 20 mA. Điều này cho chúng ta thấy gần như tất cả
các tín hiệu ều ưa về tín hiệu chuẩn 4 ÷ 20 mA.
+ Lý do nghiên cứu dùng tín hiệu 4 ÷ 20 mA thay vì 0 ÷ 20 mA là vì :
- Không có sự phân biệt âu là tín hiệu truyền về – âu là tín hiệu mất
nguồn hay tín hiệu ứt cable hay tín hiệu bo mạch bị hư.
Hình 2.29.- Tín hiệu dòng 4 ÷ 20 mA trong thực tế.
Giả sử cảm biến áp suất có khoảng o 0 ÷ 100 bar tương ứng với tín hiệu 4
÷ 20 mA thì giá trị 4 mA tương ứng với áp suất bằng không ( 0 ), tại giá trị 100
bar sẽ ưa về tín hiệu 20 mA. Trong trường hợp cảm biến bị hư hỏng, giá trị ưa về
sẽ là 3,8 mA (theo mặc ịnh một số cảm biến) hoặc khi áp suất vượt ngưỡng sẽ cho
ra tín hiệu 23 mA (theo quy ịnh của một số hãng lớn trên thế giới). Trường hợp bị
mất nguồn tín hiệu ưa về 0 mA, chúng ta xác ịnh rõ ây là bị ngắn mạch ( ứt cable hoặc mất nguồn).
Trường hợp này nếu dùng cảm biến áp suất có tín hiệu 0 ÷ 20 mA thì khi
cảm biến bị hư hỏng hay bị ngắn mạch thì tín hiệu ưa về ều là 0 mA. Lúc này việc
chuẩn oán bị ngắn mạch hay cảm biến bị hư hỏng là một iều khó khăn và tốn thời
gian hơn rất hiều. Chúng ta rất dễ nhầm lẫn giữa cảm biến bị hư hỏng và cảm biến
ang hoạt ộng nhưng có giá trị là không ( 0 ). Điều này rất nguy hiểm trong việc iều khiển tự ộng hóa.
+ Tại sao dùng tín hiệu 4 ÷ 20 mA mà không dùng tín hiệu 0 ÷ 10 V ?
Tín hiệu analog chỉ là tín hiệu 0 ÷ 10 V hoăc 0 ÷ 5 V. Thực tế hầu như hơn
80% ều dùng tín hiệu dòng 4 ÷ 20 mA. Vậy tại sao tín hiệu dòng 4 ÷ 20 mA lại phổ biến như vây ?
- Tín hiệu áp 0 ÷ 10 V bị suy giảm tín hiệu và dễ bị nhiễu.
Các tín hiệu analog từ các cảm biến ưa về có thể cách xa tủ iều khiển trung
tâm từ 100 m ến 1 km là chuyện rất bình thường. Trước kia các cảm biến dùng tín
hiệu analog 0 ÷ 10 V ể truyền về PLC, với khoảng cách xa như vậy việc sụt áp tín
hiệu là iều thường thấy trên các tín hiệu Analog dòng 0 ÷ 10 V hoặc 0 ÷ 5 V. Một lOMoARcPSD| 38777299
iều ít ai biết nữa chính là tín hiệu dòng 0 ÷ 10 V rất dễ bị nhiễu bởi các dây ộng lực
hoặc sóng hài hoặc motor hay biến tần khi dây tín hiệu i ngang qua các thiết bị này .
Chính vì thế, ể khắc phục nhược iểm trên trong iều khiển sẽ phát sinh ra bộ
cách ly tín hiệu hay bộ khuếch ại tín hiệu ể chống nhiễu trên tín hiệu analog dòng
4 ÷ 20 mA hoặc analog áp 0 ÷ 10 V.
- Tín hiệu dòng 4 ÷ 20 mA không bị suy giảm bởi khoảng cách ?
Câu hỏi ầu tiên mọi người khi ọc ược thông tin ”tín hiệu dòng 4 ÷ 20 mA”
không bị suy giảm bởi khoảng cách, vậy nó truyền ược bao xa.
Nguồn dòng hay nguồn cấp dòng hoặc tiêu thụ dòng là nguồn có tổng trở
rất lớn. Chính vì thế mà tín hiệu analog dòng 4 ÷ 20 mA ít bị ảnh hưởng bởi iện trở
của dây ngoại trừ tổng trở của dây dẫn quá lớn vượt qua ngưỡng cho phép .
Các tín hiệu làm nhiễu như : biến tần, sóng hài, motor phát ra từ trường thường
là xung iện áp. Chính vì thế với nguồn tín hiệu là nguồn dòng và tải tín hiệu lại có
iện trở nhỏ, các xung nhiễu iện áp gần như ít bị ảnh hưởng. Tuy nhiên ó chỉ là các
ảnh hưởng nhỏ của tác ộng ngoại vi bên ngoài có công suất nhỏ, trong trường hợp
các Motor hay biến tần có công suất lớn thì việc chống nhiễu là một iều không dể
dàng. Lúc ó chúng ta phải mất tiền ể mua thêm bộ lọc nhiễu .
Việc truyền tín hiệu 4 ÷ 20mA i xa ược bao nhiêu tuỳ thuộc vào tiết diện và
iện trở của dây dẫn truyền về chứ không hề phụ thuộc vào ộ dài cần truyền về .
+ Tín hiệu 4 ÷ 20 mA có hai dạng là tín hiệu 4 ÷ 20 mA Passive (không
nguồn - hai dây) và tín hiệu 4 ÷ 20 mA Active (có nguồn - ba dây).
Tín hiệu 4 ÷ 20 mA hai dây hay còn gọi là tín hiệu 4 ÷ 20 mA passive là
loại tín hiệu không cần nguồn cấp mà nguồn và tín hiệu dùng chung. Chúng ta
thường thấy các tín hiệu 4 ÷ 20 mA Passive trong các cảm biến áp suất hay bộ
chuyển ổi tín hiệu nhiệt ộ.
Tín hiệu 4 ÷ 20 mA ba dây hay còn gọi là tín hiệu 4 ÷ 20 mA Active tức là
2 dây cấp nguồn 24VDC và một dây Signal 4 ÷ 20 mA ưa về. Tín hiệu 4 ÷ 20 mA
Active ược dùng trong các máy móc cũ ể dễ truyền tín hiệu 4 ÷ 20 mA về. Tuy nhiên
việc truyền bằng tín hiệu 4 ÷ 20 mA Active dể bị nhiễu hơn tín hiệu 4 ÷ 20 mA Passive.
Vậy, sử dụng tín hiệu 4 ÷ 20 mA hai dây hay tín hiệu 4 ÷ 20 mA ba dây.
Một iều chúng ta thường gặp nữa là phần lớn các bộ ọc tín hiệu analog hoặc
PLC chỉ ọc ược tín hiệu 4 ÷ 20mA có nguồn dòng (Active) mà không ọc ược tín
hiệu 4 ÷ 20mA Passive. Vậy làm sao ể PLC ọc ược tín hiệu 4 ÷ 20mA 2 dây không
nguồn (Passive). Việc này hết sức ơn giản, thực hiện việc kết nối nối tiếp với nguồn
24VDC bên ngoài (hình 2.30). lOMoARcPSD| 38777299
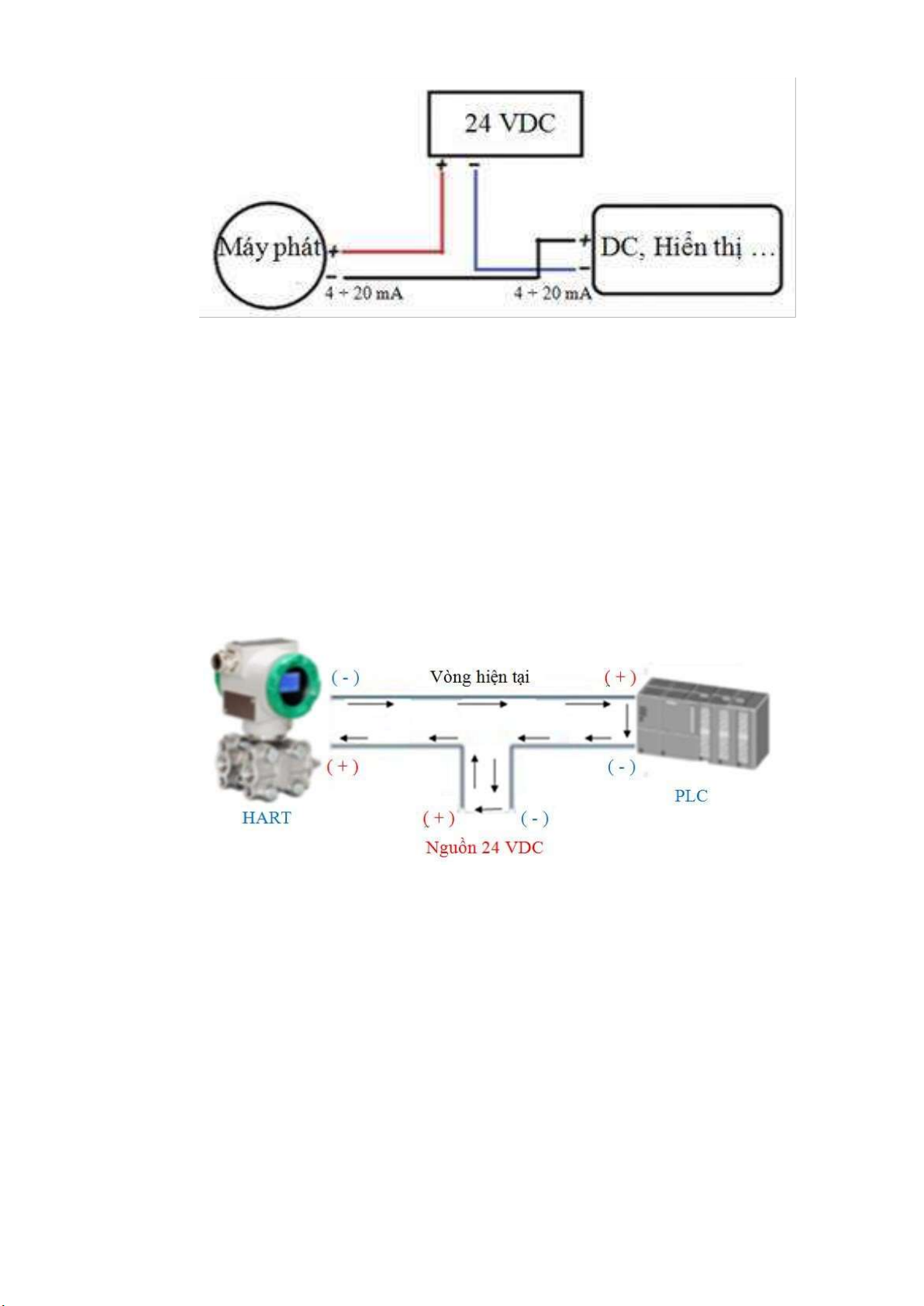
Hình 2.30.- Cách kết nối tín hiệu 4 ÷ 20mA 2 dây với PLC hoặc bộ ọc tín hiệu Active.
Giả sử sử dụng cảm biến áp suất (hình 2.31) nên việc kết nối tín hiệu 4 ÷ 20
mA 2 dây (không nguồn) với PLC ược thực hiện ơn giản với việc cấp thêm một
nguồn 24VDC. Nguồn Dương 24VDC (+) ược kết nối với chân Dương (+) của
cảm biến áp suất 2 dây hay bộ chuyển ổi tín hiệu hai dây Passive, chân Âm (–) của
cảm biến áp suất hai dây nối với chân Dương ( + ) của PLC, còn chân Âm (–) của
bộ nguồn 24VDC nối với chân Âm (–) của PLC.
Hình 2.31.- Kết nối tín hiệu 4 ÷ 20mA hai dây từ cảm biến áp suất với PLC.
Việc nối như thế sẽ tạo thành một vòng tròn kín giúp tín hiệu 4 ÷ 20 mA 2
dây của cảm biến áp suất có nguồn nuôi ưa tín hiệu về PLC ể xử lý tín hiệu analog 4 ÷ 20 mA.
Như vây, tín hiệu dòng 4 ÷ 20 mA ược truyền trên hai dây, tức là nguồn và
tín hiệu chung, iều này giúp tiết kiệm dây dẫn so với tín hiệu dòng 4 ÷ 20 mA loại
ba dây. Chúng ta hay gọi ó là nguồn 4 ÷ 20 mA loop power.
Đây là giáo trình dùng cho sinh viên ngành Hệ thống kỹ thuật trong công trình
với các kiến thức cơ sở hạn chế nên không giới thiệu cấu tạo cụ thể của Bộ chuyển
ổi tín hiệu mà chỉ giới thiệu nguyên tắc kết nối tạo thành mạch o.
Hiện nay trong kỹ thuật o lường thường sử dụng bộ chuyển ổi tín hiệu a năng. lOMoARcPSD| 38777299
Bộ chuyển ổi tín hiệu a năng 4 ÷ 20 mA ra ời nhằm ảm bảo tín hiệu a
chiều ầu vào và tín hiệu a năng ầu ra hoạt ộng ổn ịnh do khả năng cách ly iện
chống nhiễu cao ở ầu vào và ầu ra.
Tín hiệu a chiều ầu vào rất a dạng : từ iện áp DC, dòng iện DC cho ến can
nhiệt, RTD, PT100, chết áp tất cả ều ược chuyển ổi thành dòng iện 0/4 ÷ 20 mA, iện
áp 0 ÷ 5V, 0 ÷ 10V, 1 ÷ 5V… tùy vào mục ích sử dụng.
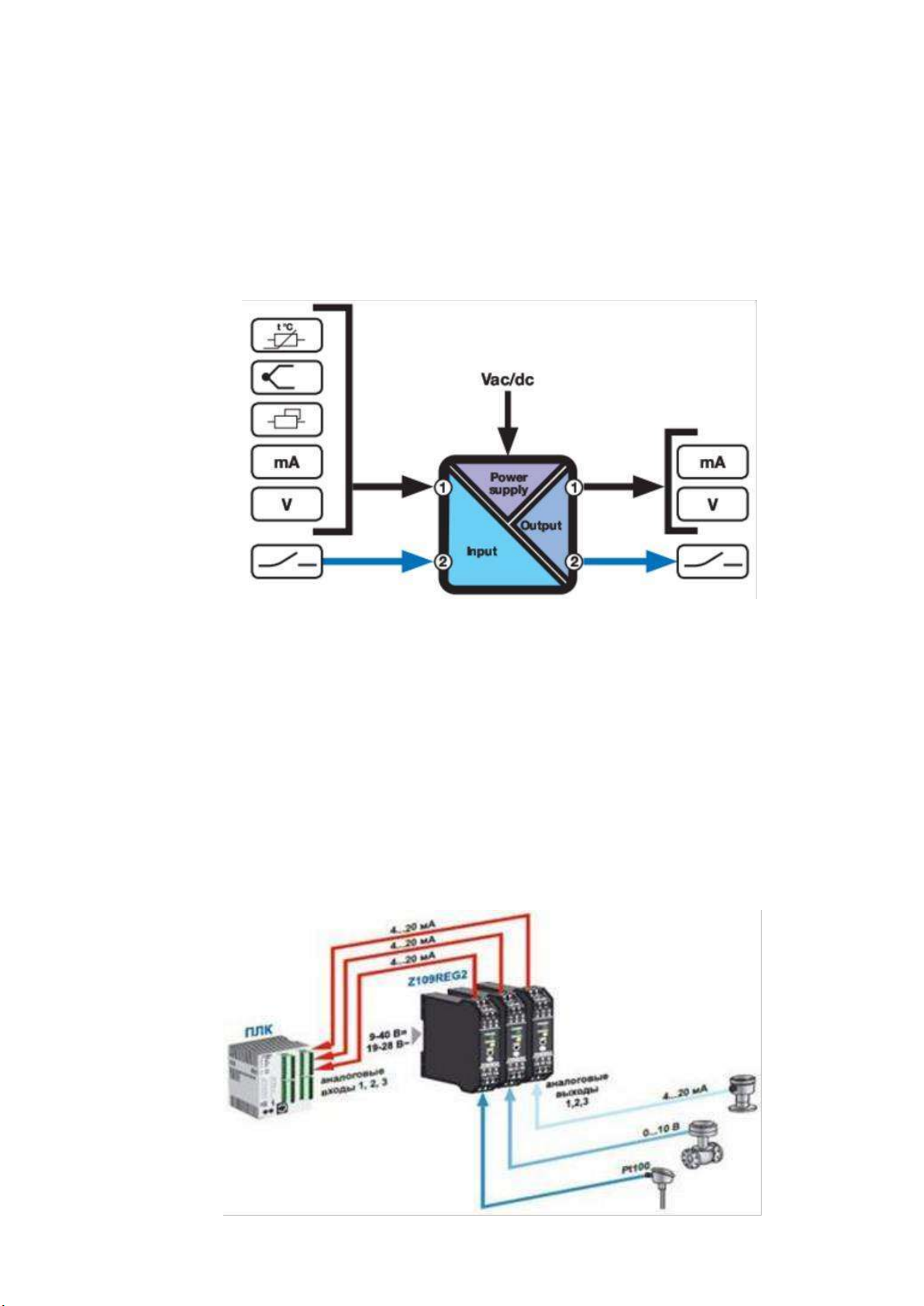
Hãy xem nguyên lý vận hành của một bộ chuyển ổi tín hiệu a năng trên hình 2.32 :
Hình 2.32.- Nguyên lý vận hành của bộ chuyển ổi tín hiệu a năng 4 ÷ 20mA.
Khi các nguồn iện áp, Cảm biến nhiệt, iện trở, dòng iện và 1 kênh rơ le ... i
qua bộ chuyển ổi tín hiệu a năng, thông qua bộ nguồn có sẵn trong bộ chuyển ổi sẽ
chuyển ổi tất cả các dòng ầu vào thành dòng iện áp, nguồn iện và một kênh rơ le
tương ứng. Thông qua một bộ hiển thị sẽ cho ra thông số o tương ứng tại vị trí ặt cảm biến.
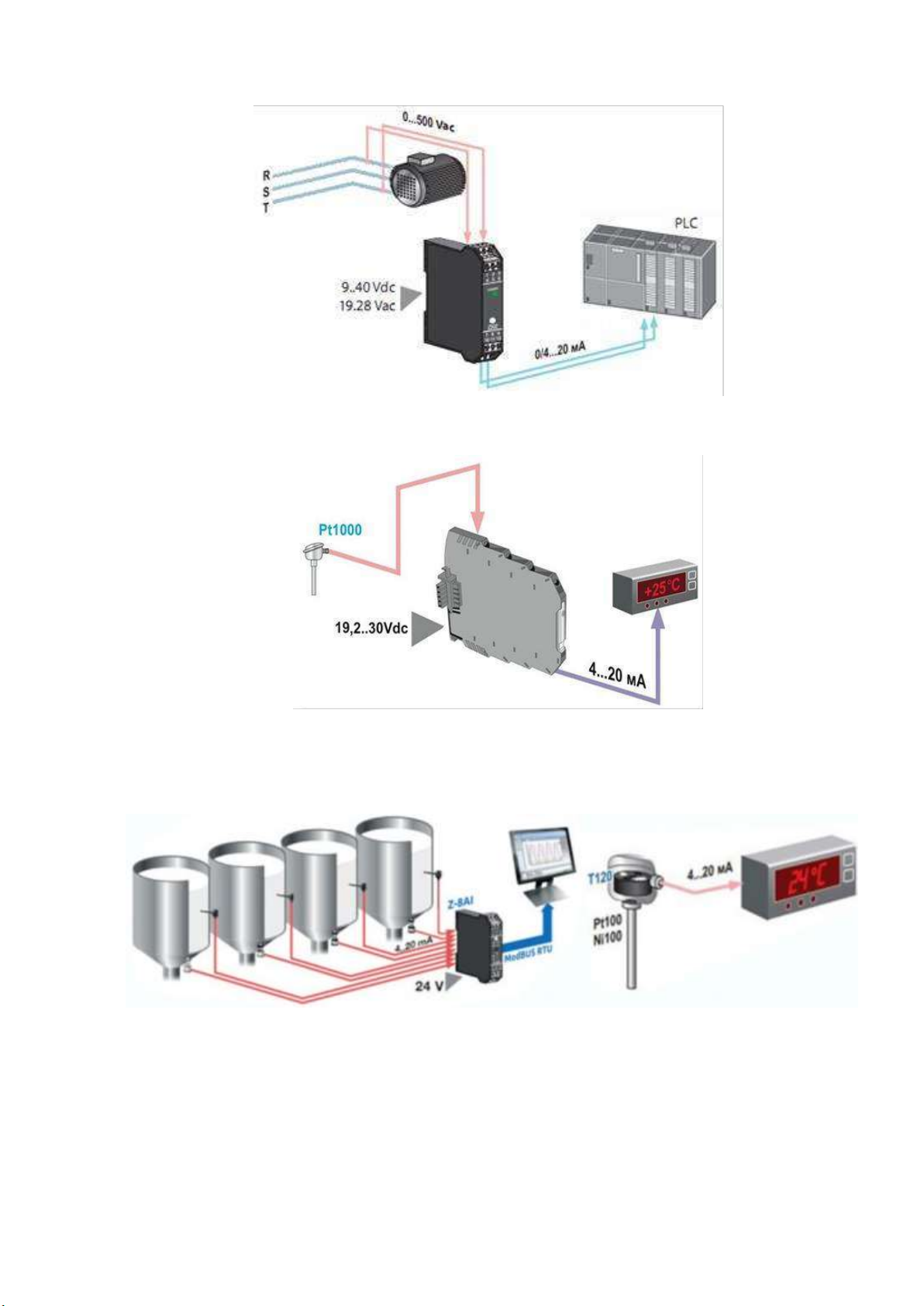
Hãy xem các ứng dụng khi sử dụng bộ chuyển ổi tín hiệu : -
Kết nối bộ chuyển ổi với các loại cảm biến khác nhau : lOMoARcPSD| 38777299 -
Giám sát iện áp cung cấp và dòng iện làm việc của thiết bị ộng lực : -
Sử dụng bộ chuyển ổi tín hiệu nhiệt ộ : -
Sử dụng cảm biến nhiệt iện trở Pt100 trong các nhà máy công nghiệp
ể o nhiệt ộ lò hơi, ống khói, khu vực có nhiệt ộ cao lên xuống thất thường…. kết
hợp với bộ chuyển ổi tín hiệu chuyển sang dòng iện 4 ÷ 20 mA ể ưa về bộ hiển thị nhiệt ộ. -
Sử dụng bộ chuyển ổi tín hiệu loadcell : lOMoARcPSD| 38777299 -
Ứng dụng bộ chuyển ổi tín hiệu loadcell :
2.2.8.- Cơ cấu Chỉ thị số (digital).
Hiện, trên thị trường ngoài các thiết bị o hiển thị cơ (analog) còn có các thiết bị o
hiển thị số (digital). So với các thiết bị cơ iện, thiết bị o hiển thị số ã khắc phục ược
một số nhược iểm của thiết bị o cơ iện như : tăng ộ nhạy, tăng tổng trở ầu vào nên
hạn chế ược sai số trong quá trình o, cấu tạo nhỏ gọn. Đặc biết, do hiển thị số nên
kết quả ọc ược nhanh chóng áp ứng ược tần số cao.
Thiết bị o hiển thị số có những ưu iểm sau : - Độ nhạy thích hợp. -
Tiêu thụ năng lượng ít. - Tốc ộ áp ứng nhanh. -
Dễ tương thích và tín hiệu dễ dàng truyền i xa. - Độ tin cậy cao. lOMoARcPSD| 38777299 -
Tính linh hoạt cao phù hợp với các vấn ề về o lường.
2.2.8.1.- Nguyên lý hoạt ộng của chỉ thị số.
Các phương tiện o số ược xây dựng theo nhiều phương pháp khác nhau, như :
. Phương pháp thời gian - xung. . Phương pháp thời gian.
. Phương pháp tần số …
Do vậy, về cấu tạo rất a dạng và tồn tại nhiều sơ ồ cấu tạo của phương tiện o số. Để
tổng quan và phản ánh một cách ặc trưng nhất nguyên lý làm việc thì bất kỳ một
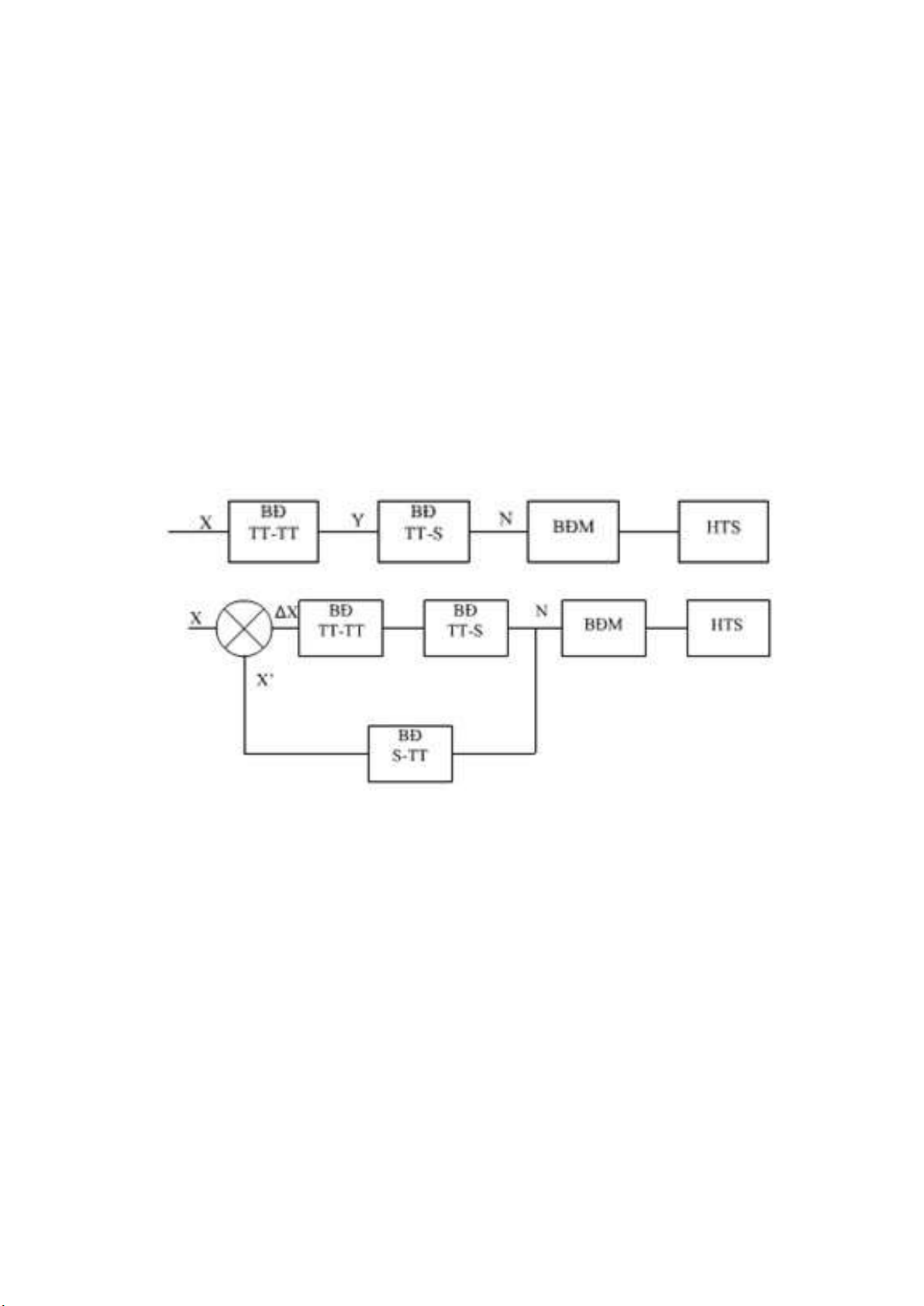
phương tiện o số nào cũng ược ưa về hai dạng sơ ồ cấu trúc cơ bản sau (hình 2.33) : a) b)
Hình 2.33.- Sơ ồ cấu trúc phương tiện o số.
Sơ ồ 2.33.a là sơ ồ cấu trúc của phương tiện o theo phương pháp biến ổi thẳng.
Sơ ồ 2.33.b là sơ ồ cấu trúc của phương tiện o theo phương pháp biến ổi cân bằng.
Đối với sơ ồ 2.33.a : ại lượng cần o X ầu tiên ược ưa vào bộ biến ổi tương tự
- tương tự (BĐTT - TT). Bộ biến ổi tương tự - tương tự biến ổi ại lượng tương tự
cần o X thành ại lượng tương tự Y thuận tiện cho việc biến ổi tiếp theo. Kế tiếp ại
lượng tương tự Y ược ưa vào bộ biến ổi tương tự - số (BĐTT - S). Đầu ra là ại lượng
số N tỷ lệ với ầu vào Y. Đại lượng số N ược ưa tiếp tới bộ biến ổi mã ể biến ổi về
dạng mã thuận tiện cho việc lưu giữ, xử lý và hiển thị. Cuối cùng là khối hiển thị số
(HTS) hiển thị kết quả o mã N. Các phương tiện o số cấu tạo theo phương pháp biến
ổi thẳng này có ộ chính xác không cao nhưng ngược lại tốc ộ o lại lớn, cấu trúc ơn giản. lOMoARcPSD| 38777299
Đối với sơ ồ 2.33.b : có thêm mạch phản hổi từ ầu ra phản hồi về ầu vào, bộ
biến ổi số - tương tự (BĐS - TT) biến ổi ại lượng số N ở ầu ra thành ại lượng tương
tự X’ và ưa về ầu vào ể so sánh với ại lượng cần o X.
Khi X = X’, kết thúc quá trình cân bằng, ta có : N = X. Chính vì vậy mà các
phương tiện o số theo phương pháp biến ổi cần bằng có ộ chính xác cao nhưng ngược
lại tốc ộ o lại nhỏ. -
Bộ biến ổi tương tự - tương tự : dùng biến ổi ại lượng tương tự ở ầu
vào thành ại lượng tương tự khác ở ầu ra, ể thuận tiện cho quá trình xử lý tiếp theo.
Trong kỹ thuật o lượng số có rất nhiều bộ biến ổi loại này (bộ biến ổi iện áp - tần số …). -
Bộ biến ổi tương tự - số : là bộ biến ổi cơ bản nhất trong kỹ thuật o
lường số. Nó thực hiện quá trình số hóa trong các phương tiện o lường số, nghĩa là
biến ổi ại lượng tương tự ở ầu vào thành ại lượng số ở ầu ra. Có rất nhiều phương
pháp biến ổi tương tự - số, cho nên cũng tồn tại rất nhiều bộ biến ổi tương tự - số
(bộ biến ổi iện áp - mã, thời gian - mã …). -
Bộ biến ổi số - tương tự : là sự biến ổi ngược, nó thực hiện phép biến
ổi ại lượng số ở ầu vào thành ại lượng tương tự ở ầu ra của bộ biến ổi. Các bộ biến
ổi số - tương tự ược sử dụng rông rãi trong kỹ thuật o lường số (trong mạch phản
hồi của các phương tiện o lường số theo phương pháp cần bằng. Các bộ biến ổi số -
tương tự ược xây dựng theo nhiều phương pháp khác nhau nên tồn tại rất nhiều các
bộ biến ổi số - tương tự (bộ biến ổi mã - thời gian, bộ biến ổi mã - iện áp …). -
Bộ biến ổi mã - mã : trong kỹ thuật o lường thường dùng mã 2 và một
số mã khác, nhưng ể hiển thị kết quả o lại dùng mã 10 (vì con người từ lâu ã quen
mã 10). Do vậy, thường dùng các bộ biến ổi mã - mã ể biến ổi từ mã này sang mã
khác, nhất là biến ổi từ mã 2 thành mã 10 ể hiển thị kết quả o. -
Bộ hiển thị số : thường có các loại sau :
. Bộ hiển thị số bằng iốt phát quang (LED).
. Bộ hiện thị số tinh thể lỏng (LCD). . Đèn hiện số.
2.2.8.2.- Mã số - Mạch biến ổi mã. lOMoARcPSD| 38777299
Mã số là những ký hiệu về một tập hợp số, từ tổ hợp của các ký hiệu ta có thể
ọc ược bất kỳ số nào.
Có các loại mã số sau : -
Mã cơ số 10, ó là hệ ếm thập phân có 10 ký tự từ 0, 1, 2, 3, … , 9. -
Mã cơ số 2 là loại mã có hai trạng thái ược ký hiệu 0 và 1 (còn gọi là mã nhị phân). -
Mã 2 - 10 (còn gọi là mã BCD) là sự liên hệ giữa mã cơ số 2 và mã cơ
số 10 ể dễ quan sát và dễ ọc.
Mạch biến ổi mã là thiết bị dùng ề biến ổi từ mã cơ số 2 hoặc mã 2 - 10
thành mã cơ số 10, nghĩa là thể hiện dưới dạng số thập phân. Ngày nay các bộ giải
mã ược chế tạo dưới dạng vi mạch. Ví dụ như vi mạch SN74247 có các ầu ra hở
cực góp dùng ể iều khiển LED có chung anốt 5V. Các iện trở R1, R2,…, R7 ể hạn chế dòng.
Phần sau ây sẽ trình bày nguyên lý một số mạch biến ổi từ mã. Dựa vào
nguyên lý của các mạch biến ổi mã này mà người ta chế tạo thành các vi mạch chuyên dụng.
a) Mạch biến ổi từ mã thập phân sang nhị phân :
Tổng quát có m ầu vào tương ứng với m số thập phân từ 0, 1, 2... m-1 và n
ầu ra tương ứng với n bít của mã số nhị phân. Người ta thường tổng hợp bộ biến ổi
mã với số ầu vào m = 10 tức là gồm x0, x1,... x9 ứng với các số thập phân từ 0, 1,
2,... 9. Như vậy bộ biến ổi mã sẽ có bốn ầu ra tương ứng y8, y4, y2, y1 ứng với bốn
bít của mã nhị phân có trọng số 8, 4, 2, 1. Ta có bảng trạng thái như sau:
Bảng 2.1. Bảng trạng thái biến ổi từ số thập phân sang nhị phân. Số thập Mã nhị phân phân Y8 Y4 Y2 Y1 Xo(0) 0 0 0 0 X1(1) 0 0 0 1 X2(2) 0 0 1 0 X3(3) 0 0 1 1 X4(4) 0 1 0 0 X5(5) 0 1 0 1 X6(6) 0 1 1 0 X7(7) 0 1 1 1 X8(8) 1 0 0 0 lOMoARcPSD| 38777299 X9(9) 1 0 0 1
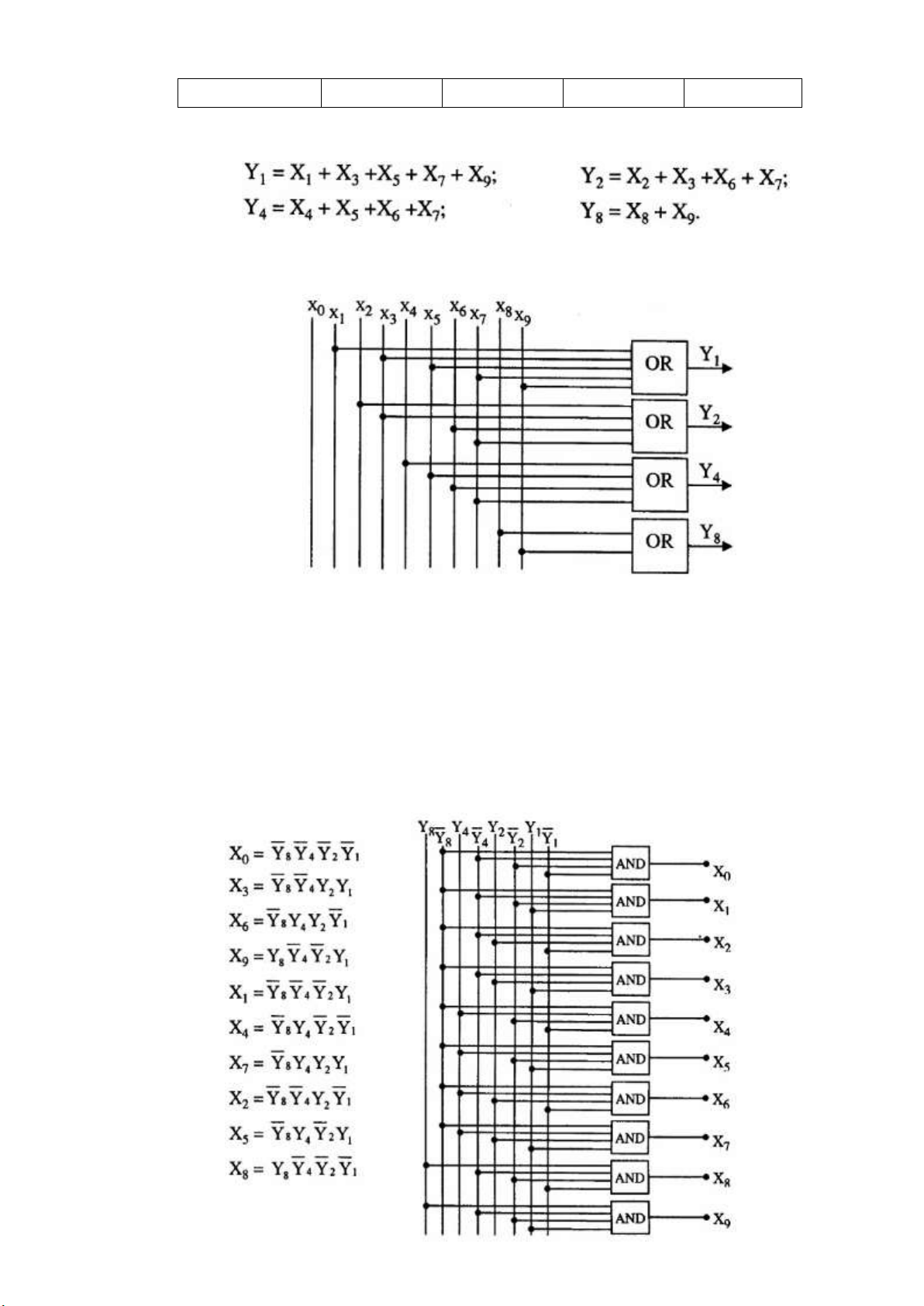
Từ bảng trạng thái ta có :
Vậy ta có thể thành lập mạch biến ổi mã từ thập phân sang nhị phân như sau :
Hình 2.34 .- Mạch tuần ổi mã từ thập phân sang nhị phân.
b) Mạch biến ổi mã từ nhị phân sang thập phân :
Nhiệm vụ của mạch này ngược với mạch trên. Với bảng trạng thái 2.1 ta có
X0 ÷ X9 là các biến phụ thuộc còn Y1 ÷ Y8 là các biến ộc lập. Vì vậy ta có các
phương trình logic và sơ ồ mạch logic tương ứng : lOMoARcPSD| 38777299
Hình 2.35 .- Mạch biến ổi từ mã nhị phân sang thập phân.
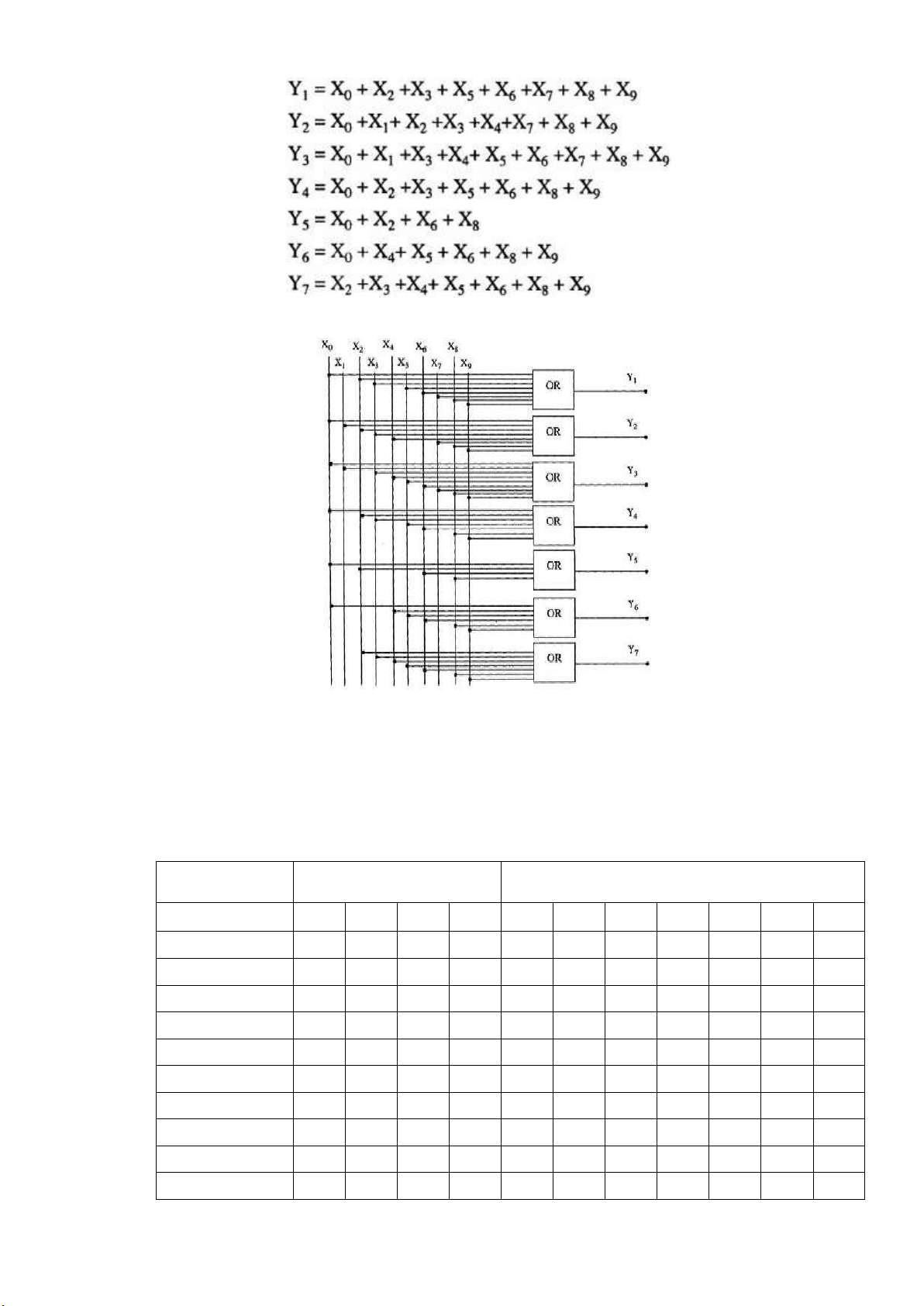
c) Mạch biến ổi từ số thập phân sang chỉ thị 7 thanh :
Đầu vào là các số tự nhiên từ 0 ÷ 9, ầu ra là trạng thái các thanh sáng của chỉ
thị 7 thanh bằng một phát quang hoặc tinh thể lỏng. Xuất phát từ thực tế ta có bảng trạng thái như sau : Số
Trạng thái các phần tử thập phân Y1 Y2 Y3 Y4 Y5 Y6 Y7 Xo(0) 1 1 1 1 1 1 0 X1(1) 0 1 1 0 0 0 0 X2(2) 1 1 0 1 1 0 1 X3(3) 1 1 1 1 0 0 1 X4(4) 0 1 1 0 0 1 1 X5(5) 1 0 1 1 0 1 1 X6(6) 1 0 1 1 1 1 1 X7(7) 1 1 1 0 0 0 0 X8(8) 1 1 1 1 1 1 1 X9(9) 1 1 1 1 0 1 1
Từ bảng trạng thái ta có thể viết ược phương trình như sau (với số thứ tự các thanh như phần trước). lOMoARcPSD| 38777299
Từ ây ta có thể thiết lập mạch logic sau : hình 2. .
Hình 2.36 .- Mạch biến ổi từ mã thập phân sang chỉ thị 7 thanh.
d) Mạch biến ổi mã từ mã nhị phân sang chỉ thị 7 thanh :
Đầu vào là mã số nhị phân (8 4 2 1) ta gán các tên biến là X8, X4, X2, X1.
Đầu ra là trạng thái các thanh sáng của chỉ thị 7 thanh. Ta có bảng trạng thái sau : Số thập phân Số nhị phân
Trạng thái các thanh sáng X8 X4 X2 X1 Y1 Y2 Y3 Y4 Y5 Y6 Y7 0 0 0 0 0 1 1 1 1 1 1 0 1 0 0 0 1 0 1 1 0 0 0 0 2 0 0 1 0 1 1 0 1 1 0 0 3 0 0 1 1 1 1 1 1 0 0 1 5 0 1 0 0 0 1 1 0 0 1 1 5 0 1 0 1 1 0 1 1 0 1 1 6 0 1 1 0 1 0 1 1 1 1 1 7 0 1 1 1 1 1 1 0 0 0 0 8 1 0 0 0 1 1 1 1 1 1 1 9 1 0 0 1 1 1 1 1 0 1 1 lOMoARcPSD| 38777299
Từ bảng trạng thái ta viết ược các phương trình logic quan hệ giữa ầu ra Y ,…, 1 Y
. Tuy nhiên các phương trình này phứ
7 với các ầu vào X8, X4, X2, X1 c tạp và òi hỏi
phải tối giản bằng bìa các nô (tối giản hàm). Ví dụ :
2.2.8.3.- Bộ hiển thị số.
Thường sử dụng 7 vạch từ a ến g bố trí như hình 2.37. Nếu tất cả các vạch ều
sáng ta nhận ược số 8.
Bộ biến ổi mã từ mã nhị phân sang chỉ thị 7 thanh ược chế tạo dưới dạng vi
mạch kiểu SN 74247 có các ầu ra hở cực góp. Dùng ể iều khiển bộ chỉ thị LED có
chung anốt +5V . Để ảm bảo dòng anốt mong muốn cần thêm 7 iện trở bên ngoài.
Các bộ biến ổi mã nhị thập phân 7 vạch ược chế tạo kết hợp với khối hiển thị
dưới dạng vi mạch. Trong vi mạch bố trí các bộ nhớ ệm lưu trữ các biến vào.
Bộ chỉ thị số gồm nhiều chữ số . Hoạt ộng của bộ chỉ thị là nối tiếp chứ không
phải song song với việc sử dụng cách nối ma trận và chế ộ dồn kênh có thể rút gọn
áng kể số dây nối. lOMoARcPSD| 38777299
Hình 2.37.- Sơ ồ khối một bộ biến ổi mã dùng vi mạch.
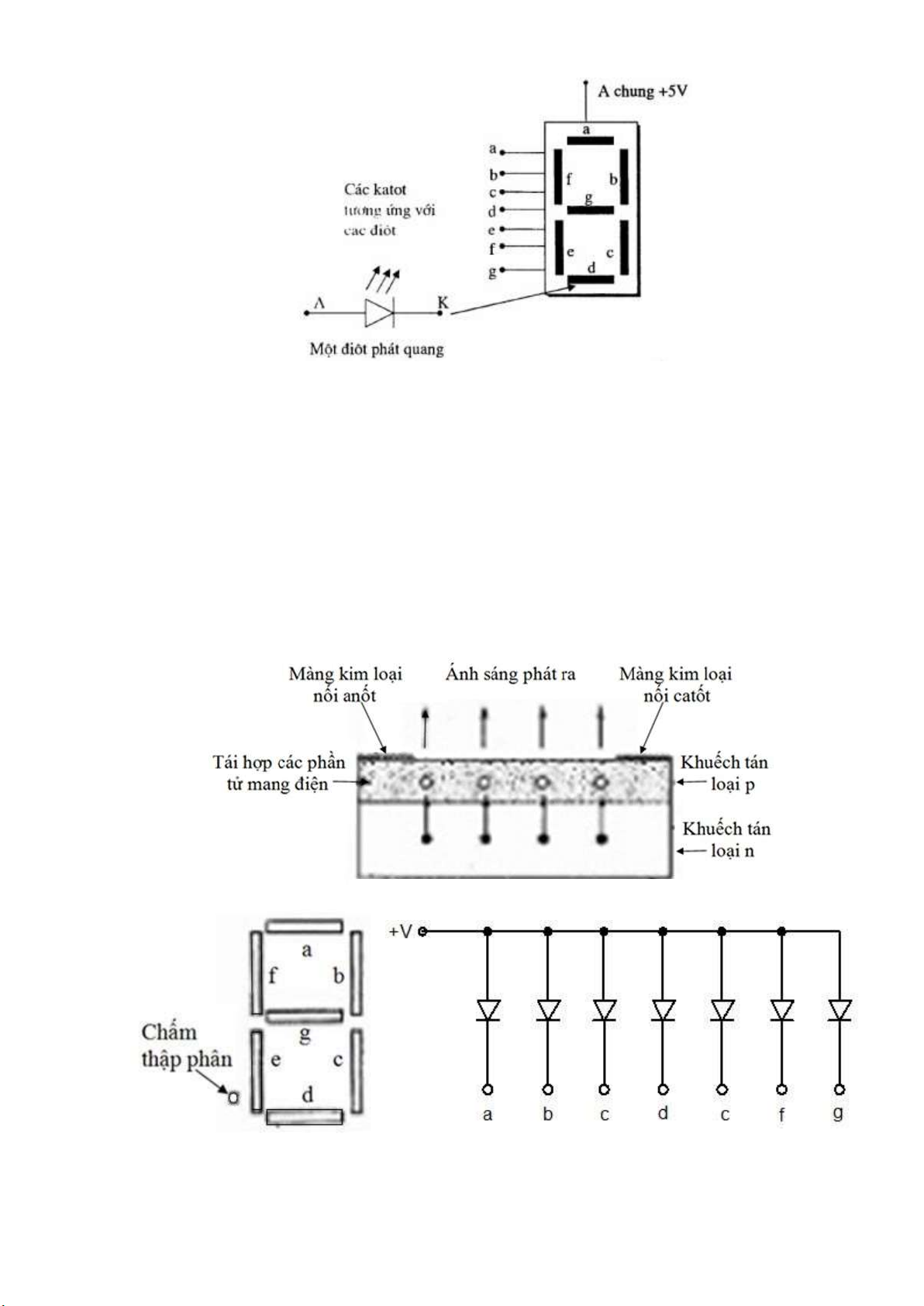
a.- Bộ hiển thị số bằng iốt phát quang (LED) :
Điốt phát quang là linh kiện bán dẫn ặc biệt, nó chỉ cho dòng iện i theo một
chiều và ngăn dòng iện i theo chiều ngược lại. Khi dòng iện i qua iốt theo chiều
thuận, có sự tái hợp các phần tử mang iện xuất hiện tại lớp tiếp xúc pn ịnh thiên
thuận (các iện tử từ n sang tái hợp với lỗ trống tại p). Chúng sẽ phát ra năng lượng
dưới dạng nhiệt và ánh sáng. Nếu vật liệu bán dẫn trong suốt thì ánh sáng ược phát
ra và lớp tiếp xúc là nguồn sáng (nên gọi là iốt quang - LED). Tiêu thụ dòng iện cỡ 10 mA/thanh. a) b) c)
Hình 2.38.- Mặt cắt của iốt quang (a); Bộ hiện số 7 oạn (b); Mạch anốt chung (c). lOMoARcPSD| 38777299
Khi ịnh thiên thuận dụng cụ ở trạng thái óng và phát sáng. Khi ịnh thiên ngược
thì phần tử ở trạng thái ngắt. Hình 2.38.a cho thấy mặt cắt của một LED thông
thường. Sự tái hợp các phần tử tải iện xảy ra ở trong vật liệu loại p, bởi vậy miền p
trở thành bề mặt của phần iốt. Để có sự phát sáng tối a, màng anốt kim loại ược cho
kết tủa quanh mép của vật liệu loại p. Đầu nối catốt của phần tử này là màng kim
loại ở áy của miền loại n. Để ánh sáng có màu khác nhau : ỏ, vàng hay xanh sẽ sử
dụng những loại bán dẫn khác nhau.
Hình 2.38.b minh họa cách bố trí bộ hiện số LED bảy oạn. Khi cho dòng iện
chạy qua những oạn thích hợp sẽ cho hiện bất kỳ số nào từ 0 ến 9. Các LED ở bộ
hiện số bảy oạn có tất cả các anốt mắc chung (anốt chung) hoặc tất cả các catốt mắc
chung (catốt chung). Độ sụt iện áp thường thấy trên LED ịnh thiên thuận là 1,2 V
và dòng thuận tiêu biểu ể cho ộ chói hợp lý là vào khoảng 20 mA. Sự òi hỏi dòng
tương ối lớn như vậy là nhược iểm chính của các bộ hiện sô LED. Một ưu iểm của
LED so với những kiểu hiện số khác là : nguồn iện áp một chiều thấp, khả năng
chuyển mạch nhanh, bền và kích thước nhỏ.
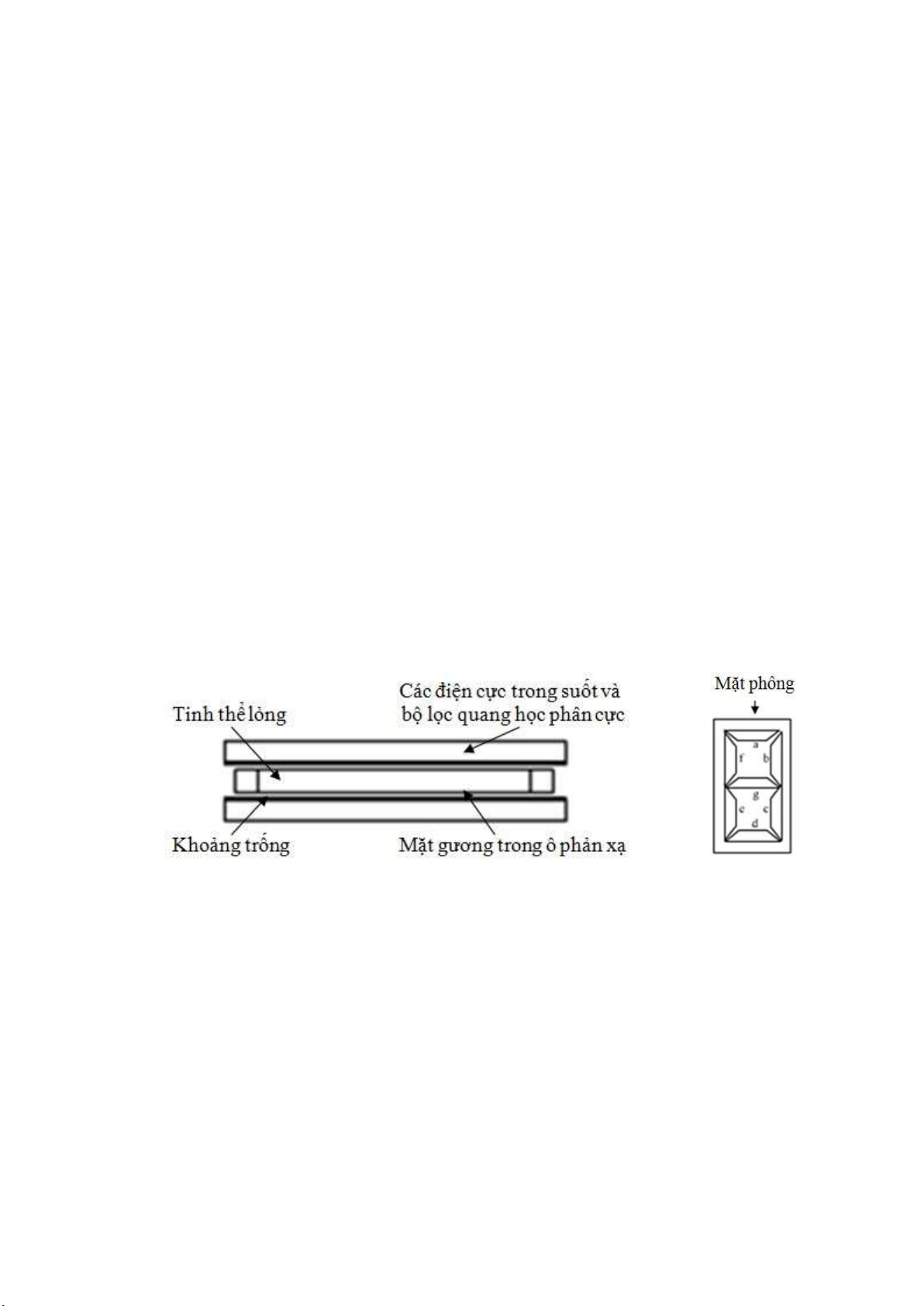
b.- Bộ hiện thị số tinh thể lỏng (LCD) : thường ược bố trí cũng theo dạng
số bảy oạn như bộ hiển thị LED. Mặt cắt của ô tinh thể lỏng kiểu hiệu ứng trường
ược minh họa trên hình 2.39. a) b)
Hình 2.39.- Cấu tạo ô tinh thể lỏng (a); Bộ hiện số bảy oạn (b).
Tinh thể lỏng là một trong các hợp chất hữu cơ có thể hiện những tính chất
quang học của tinh thể. Tinh thể lỏng ược ặt thành lớp giữa các tấm kính với các iện
cực trong suốt kết tủa ở mặt trong. Hai bộ lọc quang phân cực mỏng ược ghép ở bề
mặt của mỗi tấm kính. Chất tinh thể lỏng thật sự xoắn ánh sang i qua ô khi ô không
ược kích hoạt. Điều ó cho phép ánh sáng i qua các bộ lọc quang và ô, hòa lẫn vào
phông (nền). Khi ô ược kích hoạt, thì không có sự xoắn ánh sáng và các ô bị kích
hoạt trong bộ hiện số bảy oạn nổi lên trên phông của chúng. lOMoARcPSD| 38777299
Do các ô tinh thể là những vật phản xạ hoặc truyền xạ chứ không phải là
những vật phát ánh sáng nên chúng tốn rất ít năng lượng. Năng lượng duy nhất mà
ô òi hỏi là ể kích hoạt tinh thể lỏng. Dòng toàn phần chạy qua bốn bộ hiện số bảy
oạn nhỏ thường là khoảng 300 μA. Tuy nhiên, bộ hiện số tinh thể lỏng lại òi hỏi một
nguồn iện áp xoay chiều, hoặc dưới dạng sóng sin hay xung vuông. Sở dĩ như vậy
là vì dòng một chiều tạo ra sự mạ các iện cực của ô vốn có thể làm hỏng dụng cụ.
Nguồn iển hình với bộ hiện số tinh thể lỏng là sóng xung vuông ỉnh tới ỉnh 8 V với
tần số 60 Hz. Cũng như các bộ hiện số bẩy oạn LED, một ầu ra của mỗi ô trong bộ
hiện số tinh thể lỏng ược nối chung. Trong bộ hiện số LCD, các ầu ra của ô không
thể ghi rõ như anốt hoặc catốt. Đầu ra chung ược gọi là mặt phông (backplane - xem hình 2.39.b).
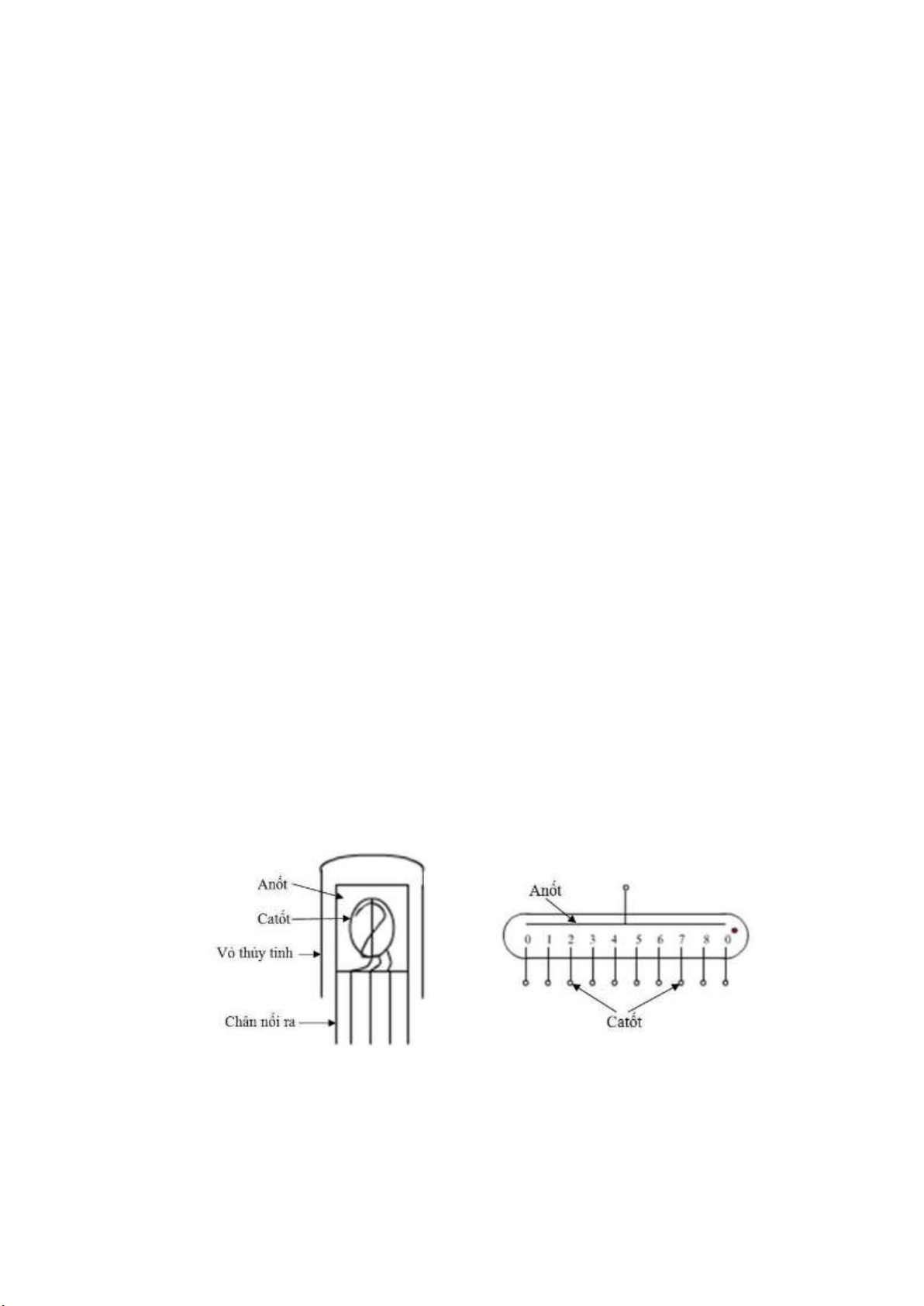
c.- Đèn hiện số : có cấu tạo là một tấm kim loại phẳng với nguồn iện áp dương
hoạt ộng như một anốt, và có mười dây catốt tách riêng, mỗi dây dưới dạng một con
số từ 0 ến 9 (hình 2.40). Các iện cực ược bọc trong ống thủy tinh chứa ầy khí trơ với
các chân nối ra từ áy. Khí neon thường ược sử dụng và nó cho ánh sáng ỏ da cam
khi èn ược kích hoạt. Tuy nhiên, có thể có các màu khác nhau với những chất khí khác nhau.
Khi tác dụng một iện áp ủ lớn vào anốt và một catốt thì các electron ược gia
tốc từ catốt tới anốt. Những electron ó va chạm với các nguyên tử khí. Hiện tượng
ó gọi là sự ion hóa do va chạm. Bởi vì các nguyên tử bị ion hóa ã mất các electron
nên chúng tích iện dương. Do ó, chúng ược gia tốc về phía catốt (âm), ở ó khi ập
vào chúng làm các electron thứ cấp bắn ra, lại gây nên sự ion hóa và sự tái hợp
electron - nguyên tử ở miền gần catốt. Điều ó khiến năng lượng ược giải phóng ra
dưới dạng ánh sáng và tạo ra sự phát sáng nhìn thấy quanh catốt. Ví các catốt có
dạng chữ số nên một chữ số sáng xuất hiện tùy thuộc vào việc catốt nào ược kích hoạt. a) b)
Hình 2.40.- Cấu tạo èn hiện số (a); Ký hiệu ống chứa khí sơ lược (b).
Các èn hiện số cần có iện áp cao (140 ÷ 200 V). Nhìn chung, chúng cồng kềnh
hơn nhiều so với các dụng cụ bảy oạn. Kiểu hiện số nhờ phóng iện qua chất khí cũng
có thể chế tạo dưới dạng bảy oạn cỡ như bộ chỉ thị LED.
Tài liệu liên quan:
-

Bài tập trắc nghiệm ôn Chương 1: Học phần kỹ thuật đo lường và cảm biến | Trường Đại học Xây Dựng Hà Nội
36 18 -

Chương 9 Đo nhiệt độ | Môn Kỹ thuật cảm biến và đo lường - Đại học Xây Dựng Hà Nội
110 55 -

Lý thuyết bài giảng môn Kỹ thuật cảm biến và đo lường nội dung chương 3: Đo dòng điện và điện áp
445 223 -
Lý thuyết bài giảng môn Kỹ thuật cảm biến và đo lường nội dung chương 5: Đo điện cảm và điện dung
344 172 -

Lý thuyết bài giảng môn Kỹ thuật cảm biến và đo lường nội dung chương 10: Đo độ ẩm
365 183