Mô phỏng hệ thống điều khiển bộ Boost Converter | Báo cáo thực hành học phần Thiết kế hệ thống và mô phỏng | Trường Đại học Phenikaa
Xây dựng mô hình cho bộ Boost Converter để hiểu cách hoạt động và làm thế nào tăng áp điện áp đầu ra. Sử dụng mô phỏng bằng phần mềm Simscape/Power Systems để tạo mô hình chính xác hơn về hệ thống điện của bộ Boost Converter và thử nghiệm các tình huống khác nhau. Thực hiện mô phỏng bằng mô hình trung bình để đơn giản hóa quá trình mô phỏng và hiểu cách xây dựng mô hình trung bình. Tóm lại, bài thực hành này giúp bạn hiểu rõ hoạt động của bộ Boost Converter, làm quen với việc mô phỏng hệ thống sử dụng các công cụ như Simscape/Power Systems và mô hình trung bình, và cải thiện kiến thức về điện tử công suất và điều khiển. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đón xem.
Môn: Thiết kế hệ thống và mô phỏng 9 tài liệu
Trường: Đại học Phenika 1.3 K tài liệu
Tác giả:






Preview text:
TRƯỜNG ĐẠI HỌC PHENIKAA
KHOA ĐIỆN - ĐIỆN TỬ ================== BÁO CÁO THỰC HÀNH HỌC PHẦN
THIẾT HỆ THỐNG VÀ MÔ PHỎNG
Họ và tên sinh viên: Đặng Quang Minh MSSV: 21012554
Lớp: Tín hiệu và hệ thống-1-2-22(N03.TH1)
Học kỳ 1 năm học 2023-2024
Hà Nội, ngày 13, tháng 10, năm 2023
BÀI THỰC HÀNH SỐ 1: MÔ PHỎNG HỆ THỐNG ĐIỀU KHIỂN BỘ BOOST CONVERTER Ngày thực hành:
Giảng viên hướng dẫn: Nguyễn Thị Thanh Quỳnh I. MỤC ĐÍCH
Xây dựng mô hình cho bộ Boost Converter để hiểu cách hoạt động và làm thế nào tăng áp điện áp đầu ra.
Sử dụng mô phỏng bằng phần mềm Simscape/Power Systems để tạo mô hình chính
xác hơn về hệ thống điện của bộ Boost Converter và thử nghiệm các tình huống khác nhau.
Thực hiện mô phỏng bằng mô hình trung bình để đơn giản hóa quá trình mô phỏng và
hiểu cách xây dựng mô hình trung bình.
Tóm lại, bài thực hành này giúp bạn hiểu rõ hoạt động của bộ Boost Converter, làm
quen với việc mô phỏng hệ thống sử dụng các công cụ như Simscape/Power Systems và mô
hình trung bình, và cải thiện kiến thức về điện tử công suất và điều khiển. II. NỘI DUNG
1. Cấu tạo và nguyên lý làm việc của sơ đồ hệ thống a. Cấu tạo
Mạch Boost Converter là một hệ thống điện tử chuyển đổi DC-DC, được sử dụng để
tăng áp suất đầu vào (điện áp DC) lên áp suất đầu ra cao hơn. Cấu tạo của mạch Boost
Converter bao gồm các thành phần sau:
Nguồn cấp : Thành phần này là nguồn điện áp DC đầu vào, được kết nối đến mạch để
cung cấp điện năng ban đầu.
Bộ chuyển đổi công suất : Đây là một thành phần quan trọng, thường là một transistor
MOSFET hoặc IGBT. Bộ chuyển đổi này được điều khiển bởi một tín hiệu PWM (Pulse
Width Modulation) để mở và đóng, cho phép luồng điện từ nguồn điện áp đầu vào tới một cuộn dây.
Cuộn dây : Cuộn dây được đặt sau bộ chuyển đổi công suất và chịu trách nhiệm lọc
dòng điện, điều chỉnh tín hiệu và tạo ra dòng điện trung bình ổn định.
Tụ điện: Được kết nối song song với tải (load) để cung cấp điện áp đầu ra ổn định và bền vững. 1
Điốt : Điốt chuyển đổi dòng điện từ cuộn dây vào điện áp đầu ra
b. Nguyên lý làm việc
Nguyên tắc hoạt động của mạch boost converter dựa vào việc chuyển đổi nguồn cấp
điện từ nguồn DC đầu vào sang dạng dao động và sử dụng nguyên lý cắt mạch và đóng
mạch để tạo ra điện áp đầu ra cao hơn. Mạch hoạt động theo các bước sau:
Bước 1: Mạch đóng mạch (ON): Ban đầu, MOSFET được bật (đóng mạch), cho phép
dòng điện chảy từ nguồn DC đầu vào qua MOSFET và cuộn tụ đầu vào.
Bước 2: Lưu trữ năng lượng: Trong thời gian MOSFET ở trạng thái đóng mạch, năng
lượng được lưu trữ trong cuộn tụ đầu vào dưới dạng năng lượng từ nguồn DC.
Bước 3: Mạch cắt mạch (OFF): Sau một thời gian xác định, MOSFET được tắt (cắt
mạch). Khi MOSFET tắt, dòng điện không thể chảy qua nó nữa, và năng lượng từ cuộn tụ
đầu vào không còn đường đi nào để chảy qua MOSFET.
Bước 4: Tạo điện áp đầu ra cao hơn: Khi MOSFET tắt, năng lượng trong cuộn tụ
đầu vào tạo ra một dòng điện đi qua diode và cuộn tụ đầu ra. Do diode chỉ cho phép dòng
điện chảy một chiều, nên điện áp đầu ra sẽ cao hơn điện áp đầu vào. Lặp lại quá trình: Quá
trình trên lặp đi lặp lại để duy trì điện áp đầu ra ổn định. Thời gian mà MOSFET ở trạng
thái đóng mạch và tắt mạch được điều chỉnh thông qua điều khiển để đảm bảo rằng điện áp
đầu ra đáp ứng yêu cầu. 2. Mô phỏng
a. Công cụ mô phỏng
Sử dụng tập tin .m của MATLAB để xuất file đồ thi kết quả khi mô phỏng. Đối với mô
phỏng sử dụng mô hình trung bình thì khai báo các thông số của mạch Boost Converter như
điện áp đầu vào (Vin), điện áp đầu ra (Vout), tỷ lệ mật độ dòng điện trong cuộn dây (L), tần
số hoạt động của bộ công tắc (f), và các thông số khác.
Sử dụng Simulink tạo một mô hình tương tác của mạch Boost Converter. Sử dụng các
khối có sẵn trong Simulink để biểu diễn cuộn dây, bộ công tắc, các phần tử điện tử khác
như tụ điện, điện trở, và các khối điều khiển. b. Sơ đồ/code mô phỏng
Mô phỏng sử dụng Simscape/Power System 2
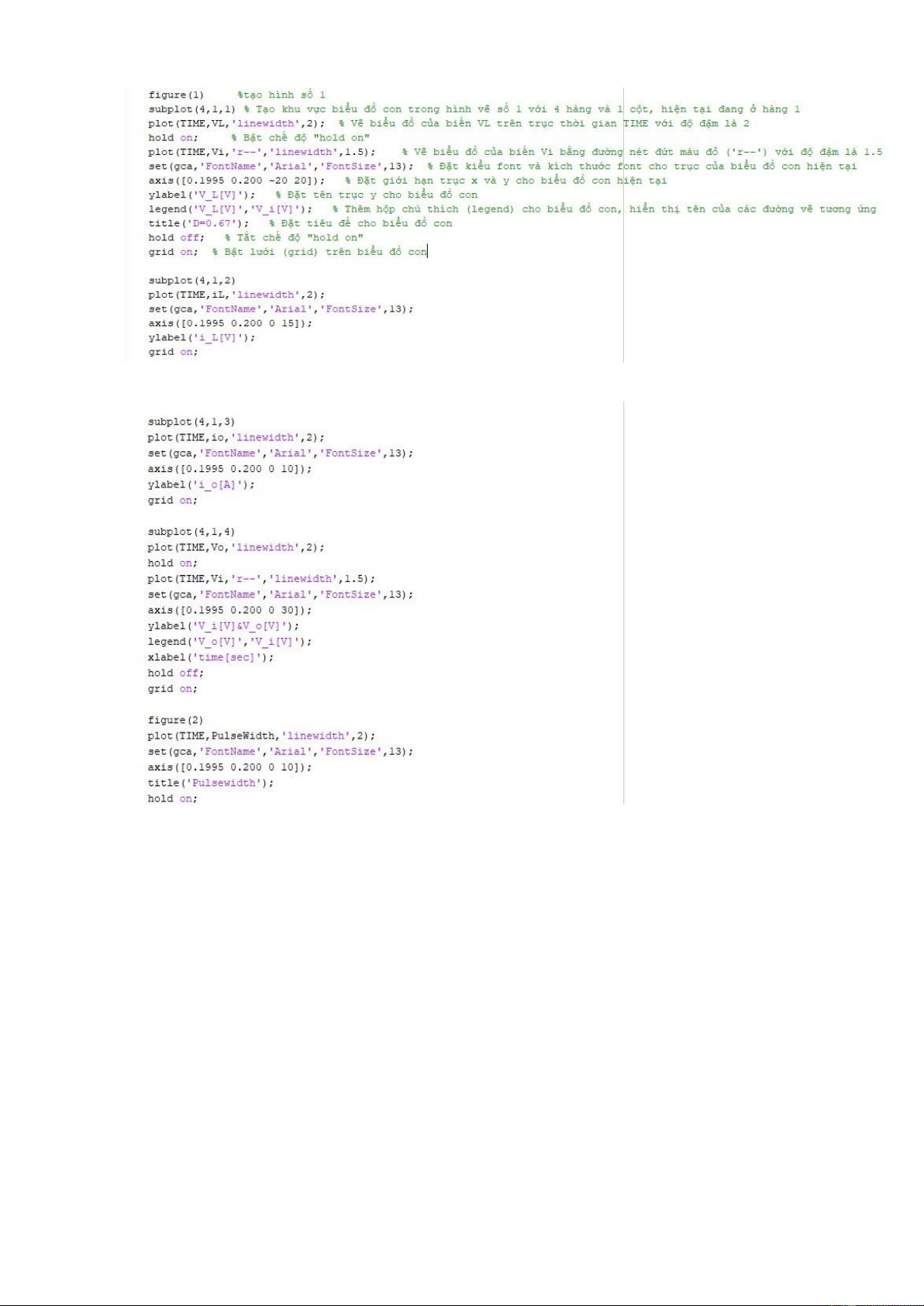
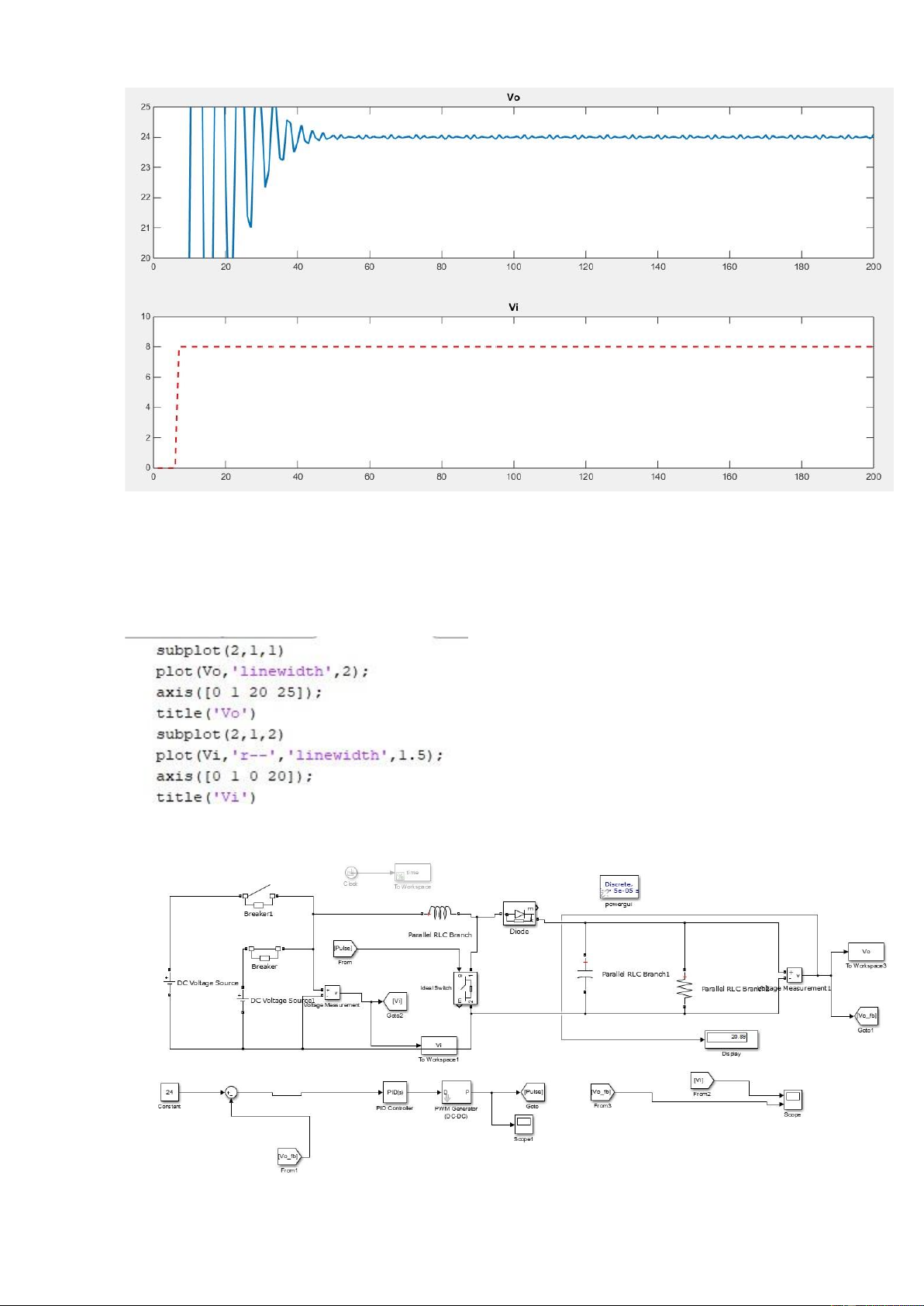
Hình 1.1: File.m xuất ra đồ thị
Hình 1.2: File.m xuất ra đồ thị 3
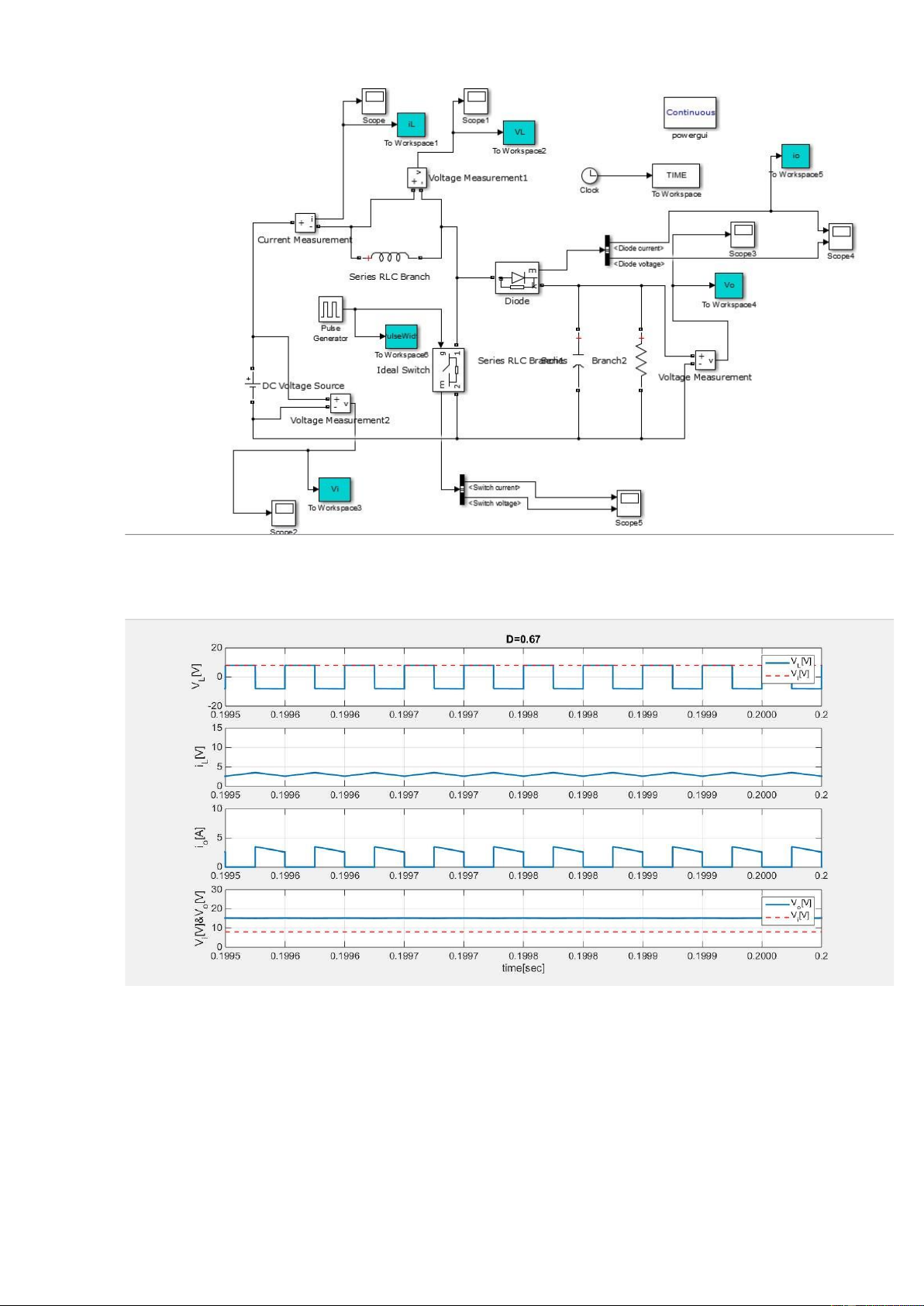
Hình 1.3: Mô phỏng Simscape Kết quả:
Hình 1.4: Kết quả đồ thị
Kết luận: Kết quả mô phỏng có phù hợp với sự biên thiên của các đại lượng vật lý của hệ thống.
Mô phỏng sử dụng mô hình trung bình 4
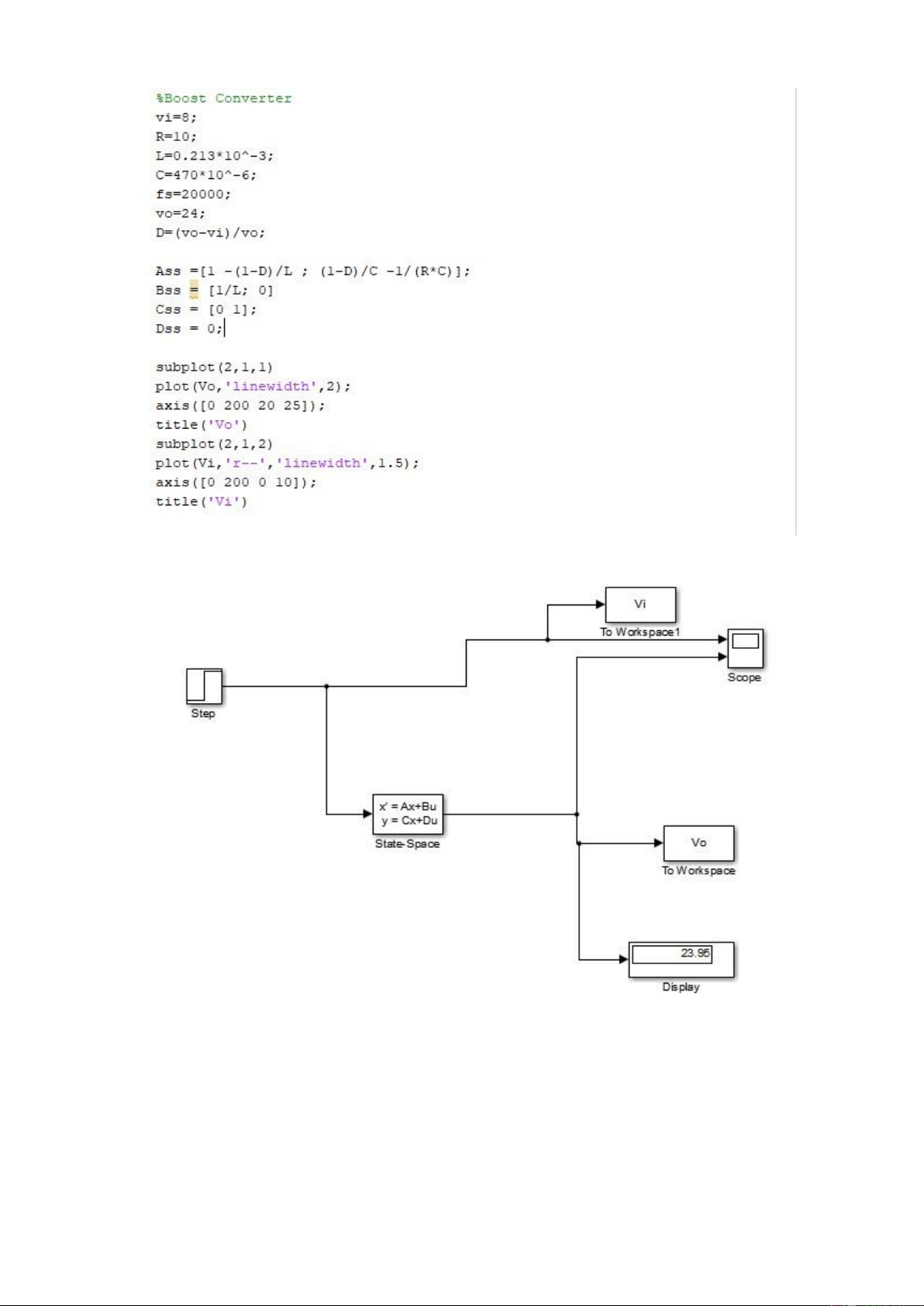
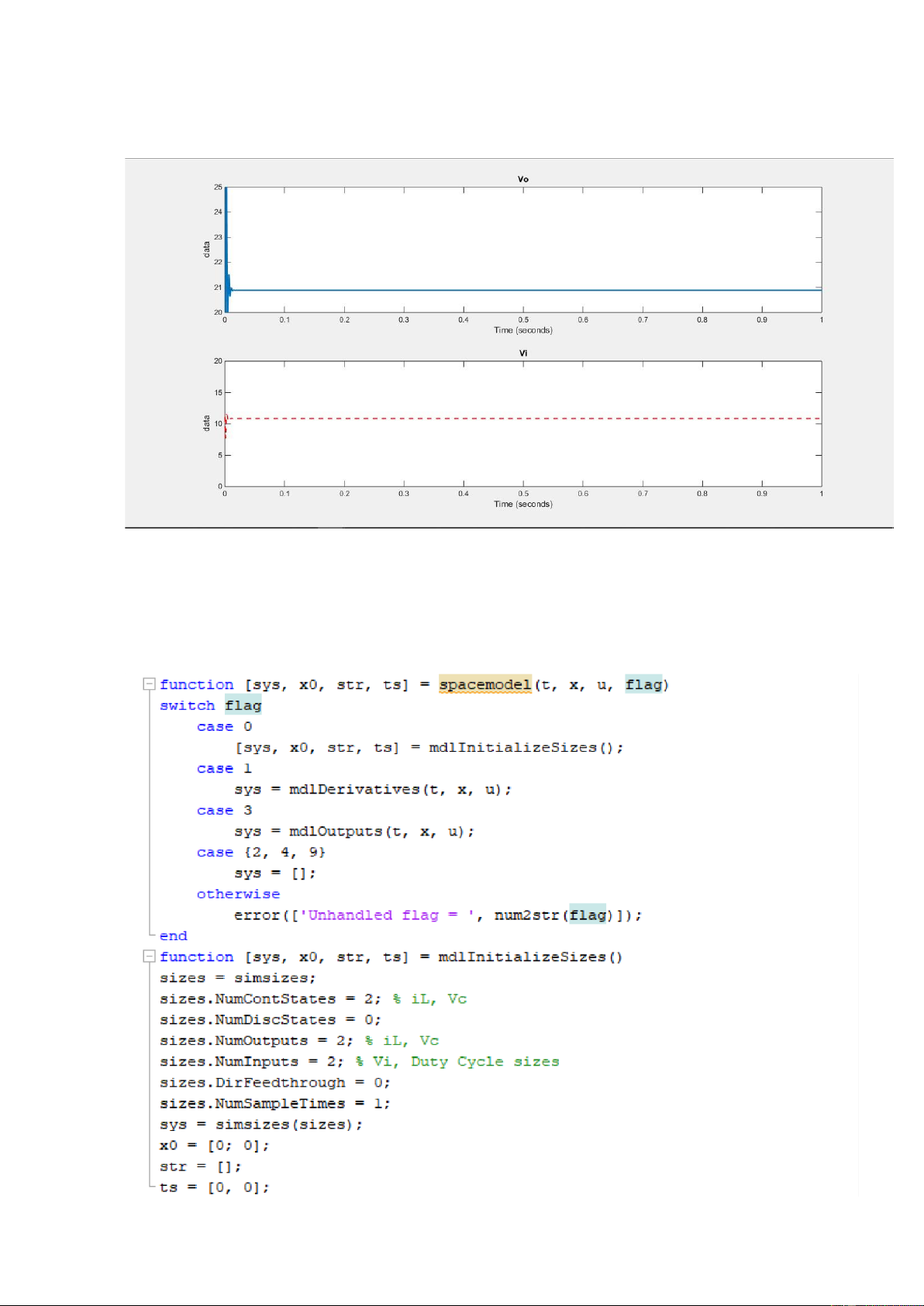
Hình 1.5: File.m khai báo thông số
Hình 1.8 : Mô hình trung bình Kết quả: 5
Hình 1.6: Kết quả đồ thị
Kết luận: Kết quả mô phỏng sử dụng mô hình trung bình có phù hợp với mô phỏng sử dụng Simscape/Power System
Phương pháp điều khiển - Mô hình vật lý sử dụng Simscape/Power System
Hình 1.7: File .m xuất ra đồ thị 6
Hình 1.8: Phương pháp điều khiển - Mô hình vật lý sử dụng Simscape/Power System
Kết quả (Kp=0.0001 Ki=0.07):
Hình 1.8: Kết quả đồ thị
Kết luận: Kết quả mô phỏng có phù hợp với sự biên thiên của các đại lượng vật lý của hệ
thống. Tuy nhiên chưa tìm ra thông số Kp và Ki phù hợp để điện áp đầu ra luôn bằng 24V
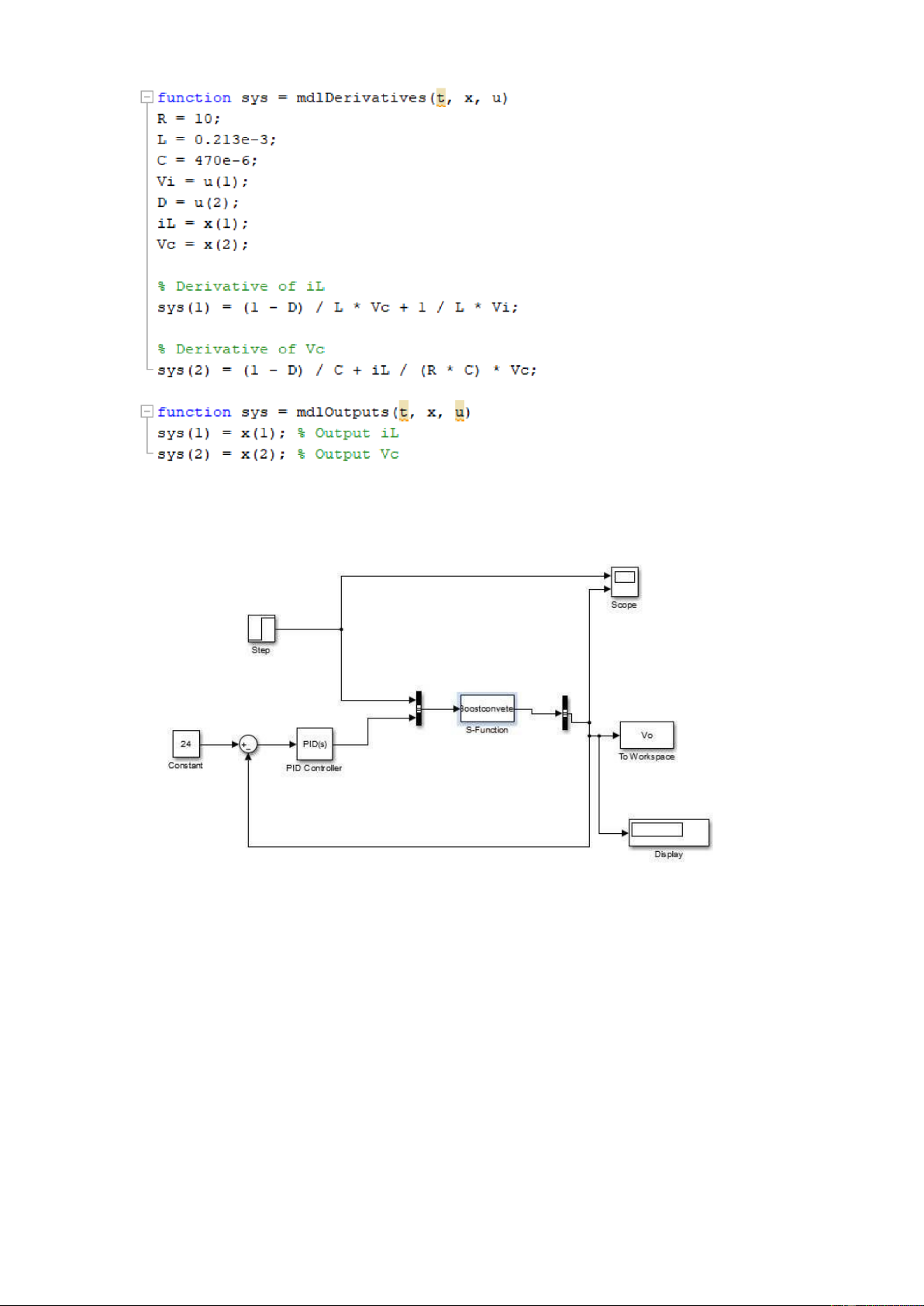
Phương pháp điều khiển - Sử dụng mô hình trung bình 7 Hình 1.9: File .m
Hình 1.10: Phương pháp điều khiển - Sử dụng mô hình trung bình
Kết luận: Với mô hình trung bình sử dụng S-Function, do chưa fix được file.m nên chưa
ra kết quả của hệ thống III. NHẬN XÉT
Trong bài thực hành, sinh viên đã thực hiện mô phỏng một hệ thống điều khiển bộ
Boost Converter sử dụng phần mềm mô phỏng hoặc công cụ mô phỏng MATLAB/ Simulink.
Sinh viên đã tạo mô hình gần như toàn diện cho Boost Converter và thực hiện mô phỏng để 8
nắm rõ cách hoạt động của nó trong các điều kiện khác nhau. Tuy nhiên còn một số phần
chưa hoàn thành nhiệm vụ như là chọn hệ số Kp và Ki trong bộ điều khiển
PID khi dùng phương pháp điều khiển, sửa lỗi file .m khi sử dụng mô hình trung bình
Kết quả đạt được so với mục đích ban đầu của bài thực hành: Các mức tín hiệu điện áp
sau khi mô phỏng tương đồng với lý thuyết và kết quả đề bài cho.
Ý nghĩa của bài thực hành: Bài thực hành này có ý nghĩa quan trọng trong việc hiểu
cách một bộ Boost Converter hoạt động và làm thế nào để thiết kế và điều khiển nó hiệu
quả. Boost Converter là một mạch chuyển đổi DC-DC phổ biến được sử dụng để tăng điện
áp đầu ra so với điện áp đầu vào, và nó thường được sử dụng trong các ứng dụng như nguồn
cung cấp điện cho các thiết bị di động, hệ thống năng lượng mặt trời và các ứng dụng khác. 9
BÀI THỰC HÀNH SỐ 2: MÔ PHỎNG HỆ THỐNG ĐIỀU KHIỂN BỘ NGHỊCH LƯU BA PHA Ngày thực hành:
Giảng viên hướng dẫn: Nguyễn Thị Thanh Quỳnh I. MỤC ĐÍCH
Hiểu cách xây dựng mô hình bộ nghịch lưu ba pha, bao gồm các phần tử như máy biến
dòng điện ba pha, biến áp, các thông số điện cơ học của máy biến dòng, và các thông số liên quan khác.
Sử dụng công cụ Simscape/Power Systems để tạo mô hình bộ nghịch lưu ba pha trong
môi trường Simulink. Điều này giúp bạn mô phỏng các tính năng và hiệu suất của hệ thống.
Nắm vững cách sử dụng mô hình không gian trạng thái để mô phỏng hệ thống điều
khiển bộ nghịch lưu ba pha giúp theo dõi các biến trạng thái của hệ thống.
Học cách thiết lập và điều khiển bộ nghịch lưu ba pha bằng cách sử dụng các phương
pháp điều khiển. Điều này bao gồm việc thiết lập các thông số điều khiển, điều chỉnh và
đánh giá hiệu suất hệ thống.
Tóm lại, mục đích chính của bài thực hành này có thể là cung cấp cho học viên hiểu
biết và kỹ năng về việc mô phỏng và điều khiển bộ nghịch lưu ba pha, một phần quan trọng
của hệ thống điện lưới ba pha. Điều này có thể giúp họ hiểu rõ cách hệ thống hoạt động và
cách điều khiển nó để đảm bảo ổn định và hiệu suất tốt. II. NỘI DUNG
1. Cấu tạo và nguyên lý làm việc của sơ đồ hệ thống a. Cấu tạo
Bộ nghịch lưu ba pha (Three-Phase Inverter) là một phần quan trọng của các hệ thống
điều khiển và điều chỉnh điện áp và dòng điện ba pha. Cấu tạo bộ nghịch lưu ba pha bao gồm các thành phần sau:
Khối VDC Supply (nguồn điện áp liên tục) trong mạch nghịch lưu ba pha chủ yếu là
nguồn điện áp đầu vào được biến đổi thành điện áp liên tục để cung cấp năng lượng cho
mạch nghịch lưu. Khối này bao gồm Bộ chỉnh lưu (Rectifier) để loại bỏ các biến đổi trong
dòng điện và điện áp và tạo ra điện áp liên tục để cung cấp cho bộ nghịch lưu.
Bộ lọc LC (L-C Filter) trong mạch nghịch lưu ba pha được sử dụng để loại bỏ các
thành phần tần số cao không mong muốn và nhiễu từ dòng điện và điện áp đầu ra, giúp tạo 10
ra một tín hiệu sóng điện áp ba pha liền tục, ổn định và sạch. Trong bộ lọc LC, cuộn cảm
được đặt trong mạch để tạo ra một điện áp đối pha với dòng điện đầu vào. Cuộn cảm có thể
được thiết kế với số vòng và tỷ lệ nổi số nhất định để xác định tần số cắt của bộ lọc.Tụ điện
được đặt song song với cuộn cảm và tạo ra một tần số cắt thấp trong bộ lọc LC. Tụ điện
được sử dụng để tạo điện áp đối pha với dòng điện đầu vào.
Khối Three-Phase Breaker 1 trong mạch nghịch lưu 3 pha là một công tắc cầu ba pha
hoặc cầu cắt ba pha. Công tắc này được sử dụng để ngắt hoặc kết nối dòng điện trong hệ thống nghịch lưu ba pha
Khối Three-Phase-Series Branch (Hay còn gọi là "Three-Phase Series Filter" hoặc
"Bộ lọc nối tiếp ba pha") trong mạch nghịch lưu 3 pha được sử dụng để cải thiện chất lượng
điện áp và dòng điện ba pha đầu ra
b. Nguyên lý làm việc
Tín hiệu vào bắt nguồn từ VDC Supply hoặc các nguồn khác như máy biến áp và bộ
chỉnh lưu. Điều này tạo ra một nguồn điện áp liên tục ba pha hoặc ba pha đầu vào cho mạch
nghịch lưu. Tín hiệu này chứa thông tin về điện áp và dòng điện ba pha ban đầu.
Universal Bridge xử lý tín hiệu vào từ nguồn điện áp liên tục và biến đổi chúng thành
điện áp và dòng điện ba pha đầu ra. Điều này thực hiện bằng cách sử dụng các linh kiện
điện tử IGBT. Universal Bridge là nơi điều khiển quá trình nghịch lưu, quyết định tần số,
góc điều khiển và biên độ của điện áp và dòng điện đầu ra.
Bộ lọc LC (L-C Filter) đặt sau Universal Bridge, nhiệm vụ của nó là loại bỏ nhiễu và
thành phần cao tần số không mong muốn từ điện áp và dòng điện đầu ra. Nó giúp điện áp
và dòng điện đầu ra trở nên ổn định và sạch hơn.
Công tắc ba pha (Three-Phase Breaker) được đặt sau bộ lọc LC. Nó được sử dụng
để kiểm soát dòng điện trong hệ thống. Khi cần ngắt dòng điện hoặc kiểm soát luồng dòng
điện, công tắc này được kích hoạt để ngắt hoặc kết nối dòng điện. Nó đảm bảo an toàn và
bảo vệ cho hệ thống và thiết bị kết nối.
Three Phase RLC Branch tham gia vào việc điều chỉnh và cân bằng dòng điện và
điện áp đầu ra theo yêu cầu cụ thể của ứng dụng, điều chỉnh thông số điện của hệ thống,
như hệ số công suất và dạng sóng. 2. Mô phỏng
a. Công cụ mô phỏng 11
Sử dụng tập lệnh MATLAB để khai báo thông số của mạch nghịch lưu và cung cấp các
thông số cho các khối Simulink trong mô hình. Điều này giúp điều chỉnh và tùy chỉnh mô
hình của mạch nghịch lưu.
Sử dụng Simulink, tạo một mô hình tương tác của bộ mạch nghịch lưu
b. Sơ đồ/code mô phỏng
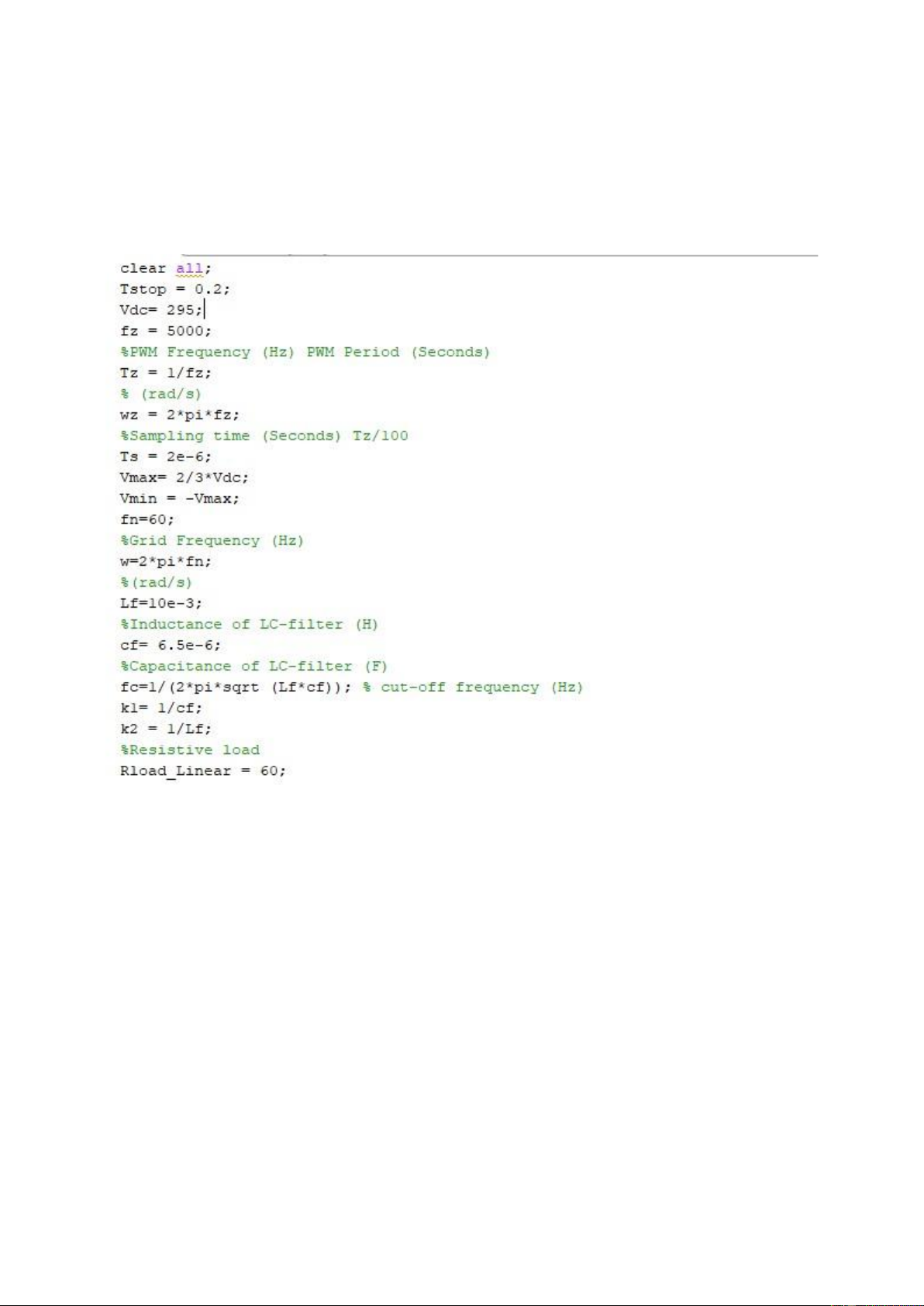
Hình 2.1: File .m khai báo thông số mạch 12
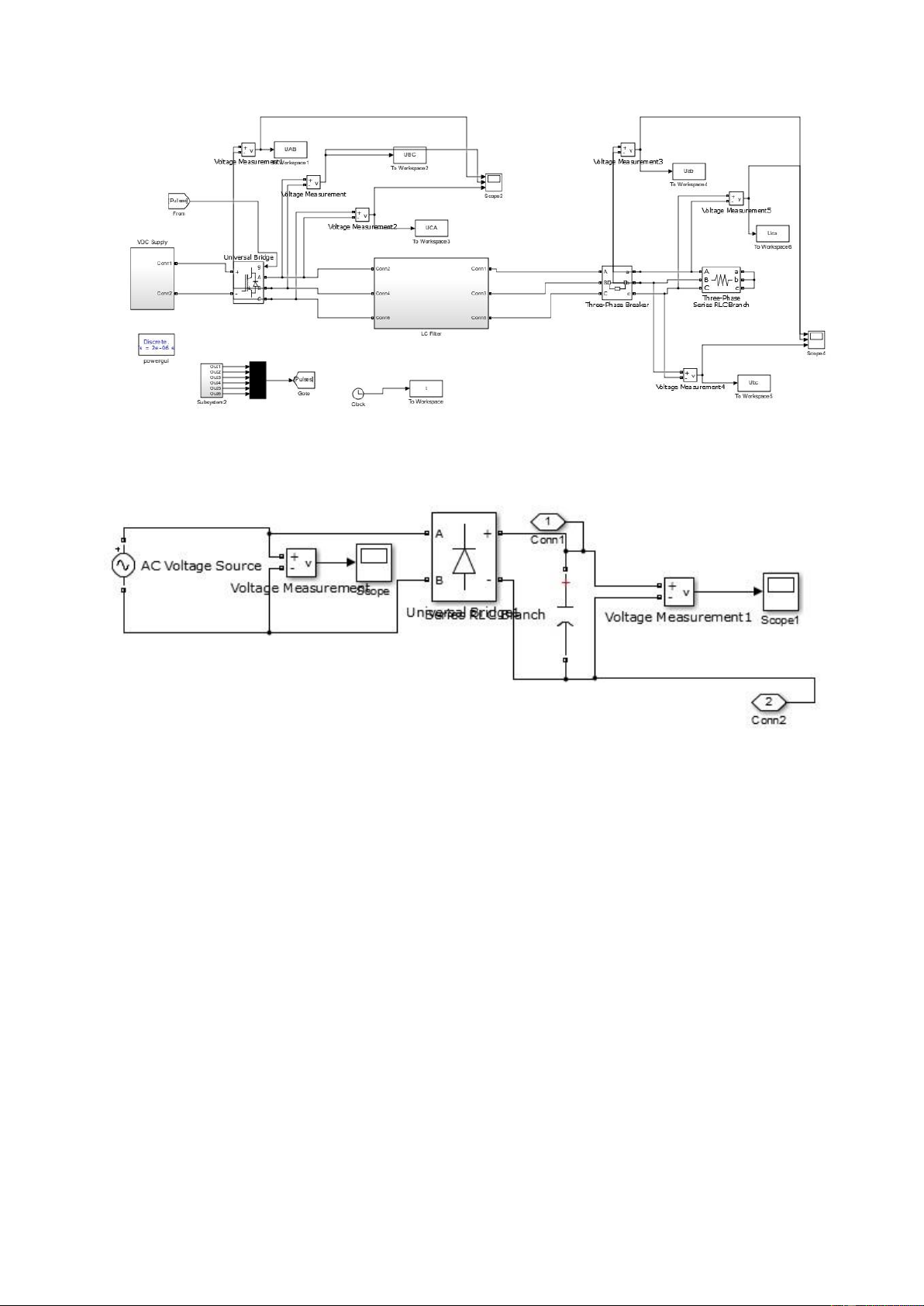
Hình 2.2: Mô phỏng simulink
Hình 2.3: Subsystem khối VDC Suply 13
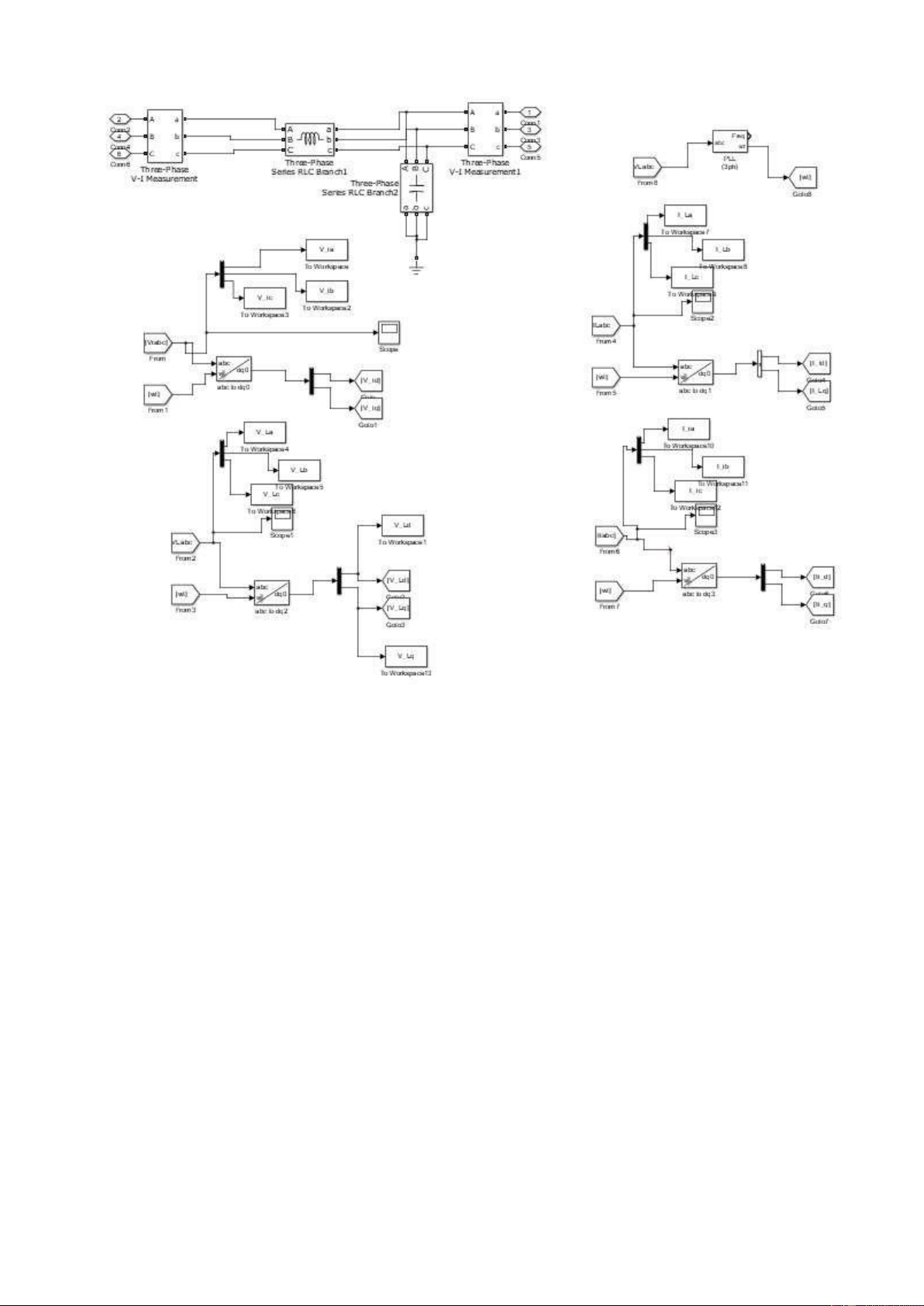
Hình 2.4: Subsystem khối LC Filter 14
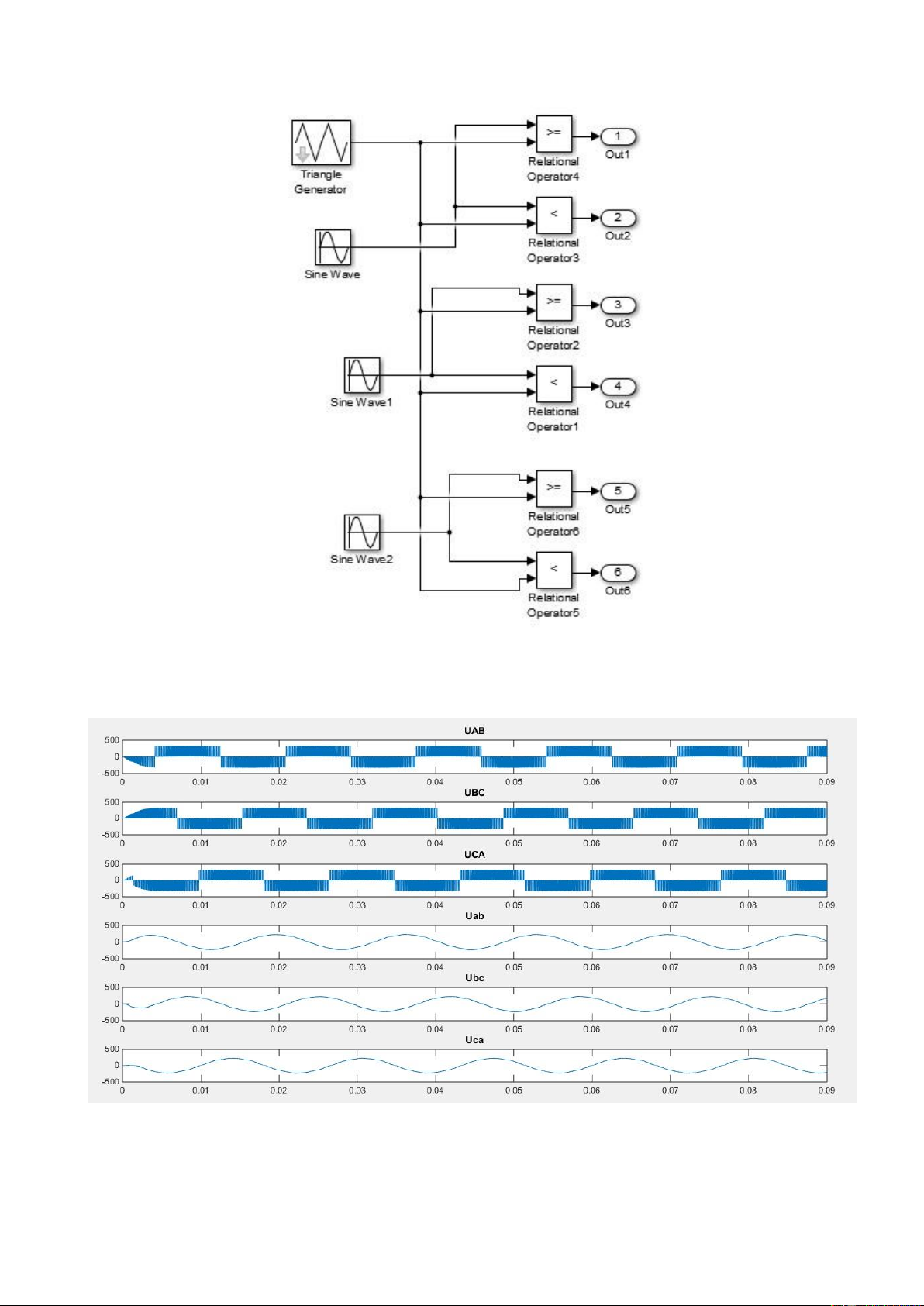
Hình 2.5: Subsystem khối tạo xung Kết quả:
Hình 2.6: Đồ thị kết quả
Kết luận: Kết quả mô phỏng dạng điện áp đầu ra phù hợp với dạng điện áp 3 pha III. NHẬN XÉT 15
Trong bài thực hành, sinh viên đã thực hiện mô phỏng hệ thống bộ điều khiển bộ ngịch
lưu ba pha sử dụng phần mềm mô phỏng hoặc công cụ mô phỏng MATLAB/
Simulink. Các kết quả mô phỏng giống với lý thuyết thực nghiêm
Kết quả đạt được so với mục đích ban đầu của bài thực hành: Đồ thị tín hiệu điện áp ra
sau khi mô phỏng là dạng điện áp ba pha đúng với yêu cầu đề bài.
Ý nghĩa của bài thực hành: Bài thực hành này có thể giúp bạn hiểu cách điều khiển và
quản lý hệ thống nghịch lưu ba pha, một phần quan trọng trong các ứng dụng công nghiệp
và điện lực. Nó có thể cải thiện kiến thức và kỹ năng trong lĩnh vực này. 16
BÀI THỰC HÀNH SỐ 3: MÔ PHỎNG HỆ THỐNG ĐIỀU KHIỂN CÁNH TAY ROBOT Ngày thực hành:
Giảng viên hướng dẫn: Nguyễn Thị Thanh Quỳnh I. MỤC ĐÍCH
Hiểu cách mô phỏng và điều khiển một cánh tay robot đơn giản với một bậc tự do, nâng
cao kỹ năng mô phỏng và điều khiển, tập trung vào mô hình hóa một cánh tay robot phẳng
với hai bậc tự do, một ứng dụng phổ biến trong lĩnh vực robot học.
Sử dụng phần mềm mô phỏng Simscape/Multibody, để mô phỏng hệ thống cơ học đa
thể hiện, bao gồm cả robot và các thành phần khác.Tìm cách biểu diễn và mô phỏng cánh
tay robot bằng mô hình không gian trạng thái
Tóm lại, bài thực hành số 3 giúp học viên phát triển năng lực mô hình hóa, mô phỏng
và điều khiển robot, từ những cánh tay đơn giản đến những hệ thống phức tạp hơn, bằng cách
sử dụng các công cụ và phương pháp khác nhau. II. NỘI DUNG
II.1. Mô hình tay máy một bậc tự do
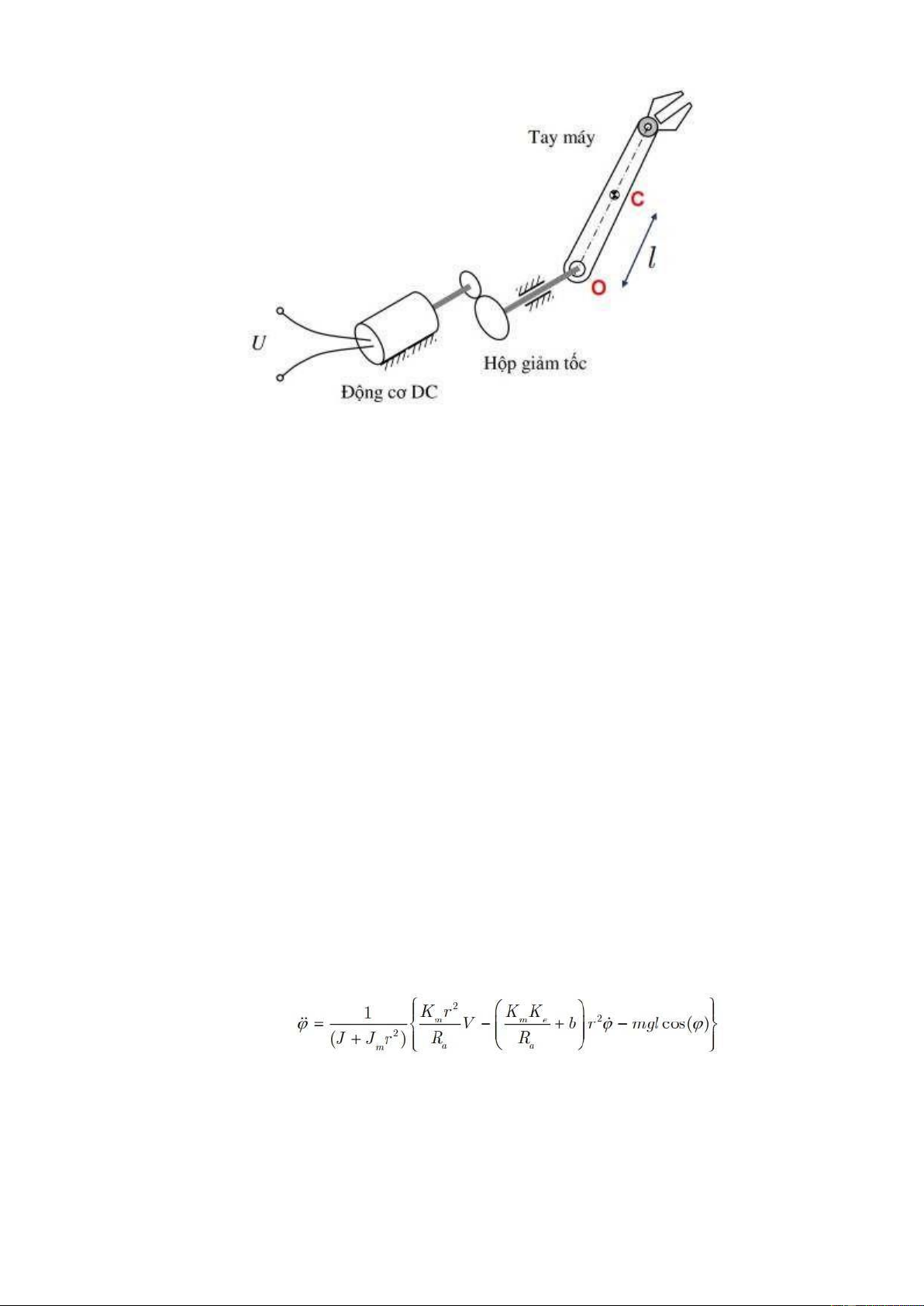
1. Cấu tạo và nguyên lý làm việc a. Cấu tạo
Tay máy: Đây là bộ phận chính của mô hình, được làm từ các khớp nối động cơ và các
khớp nối động cơ này có thể xoay quanh trục tương ứng của chúng. Đối với mô hình bậc 1,
có một khớp nối động cơ duy nhất, cho phép xoay một phần của tay máy xung quanh trục nối động cơ.
Động cơ DC: Động cơ DC được sử dụng để cung cấp nguồn năng lượng để xoay tay
máy, để kiểm soát góc xoay và tốc độ của tay máy.
Hộp giảm tốc (Gearbox): Hộp giảm tốc được sử dụng để giảm tốc độ quay của động
cơ DC và tăng lực xoay tại khớp của tay máy. Điều này giúp tăng sức mạnh và kiểm soát của tay máy. 17
Hình 3.1: Cấu tạo tay máy bậc 1
b. Nguyên lý làm việc
Nguyên lý hoạt động của mô hình tay máy bậc 1 tự do là sử dụng động cơ DC để tạo
ra chuyển động quay tại tay máy thông qua hộp giảm tốc. Hệ thống điều khiển sẽ điều chỉnh
động cơ dựa trên thông tin được nhận để đạt được góc quay mong muốn và thực hiện các nhiệm vụ cụ thể. 2. Mô phỏng
a. Công cụ mô phỏng
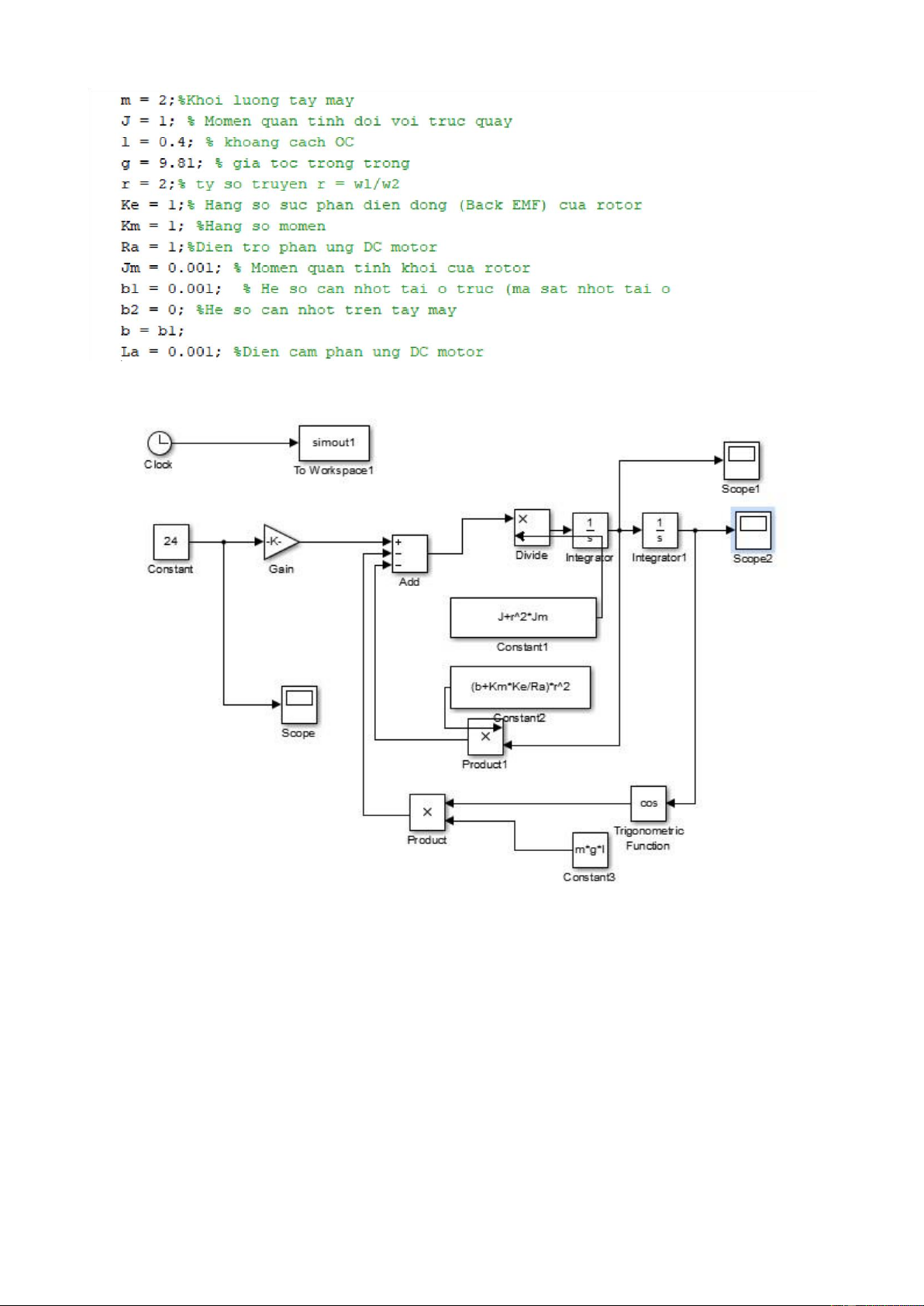
Sử dụng tập tin .m của MATLAB để khai báo các thông số của mô hình như khối lượng
tay máy (m), momen quán tính đối với trục quay (J), khoảng cách OC (l),gia tốc trọng
trường (g), tỷ số truyền (r) và một số thông số khác
Dùng Simulink để mô phỏng tương tác hệ thống tay máy bậc 1 tự do. Dùng các khối
integrator để biểu diễn phương trình vi phân, các khối gain để nhân vói các hệ số, khối to
workspace có chức năng xuất dữ liệu về MATLAB để vẽ đồ thị.Ngoài ra có thể sử dụng
subsystem để đơn giản hóa sơ đồ. Phương trình vi phân mô tả:
b.Sơ đồ/code mô phỏng 18
Hình 3.2: Khai báo thông số đầu vào File .m
Hình 3.3: Mô phỏng Mô hình tay máy một bậc tự do trên simulink 19
Tài liệu liên quan:
-

Các bước chuẩn bị cho việc học mô phỏng môn Thiết kế hệ thống và mô phỏng | Đại học Phenika
17 9 -
Bài thực hành số 4:Mô phỏng một số hệ thống cơ bản Học phần: Thiết kế hệ thống và mô phỏng | Đại học Phenika
36 18 -

ÔN TẬP THIẾT KẾ HỆ THỐNG VÀ MÔ PHỎNG TKHT&MP. Môn Thiết kế hệ thống và mô phỏng | Đại học Trường Đại học Phenika.
89 45 -

Mô Phỏng Hệ Thống Điều Khiển Nghịch Lưu Ba Pha - Bài Thực Hành 2. Môn Thiết kế hệ thống và mô phỏng | Đại học Trường Đại học Phenika.
131 66 -

Bài Thực Hành 1: Mô Phỏng Hệ Thống Boost Converter - 22010 971. Môn Thiết kế hệ thống và mô phỏng | Đại học Trường Đại học Phenika.
122 61