Những vấn đề cơ bản của sản xuất và tự động hoá sản xuất
1.1. Lịch sử, xu hướng phát triển của tự động hoá quá trình sản xuất1.2. Hệ thống điều khiển, các phần tử của hệ thống điều khiển
1.3. Các thiết bị đo lường và thu thập dữ liệu.Tài liệu giúp bạn tham khảo ôn tập và đạt kết quả cao. Mời bạn đọc đón xem
Môn: Kinh tế vi mô (VM1) 35 tài liệu
Trường: Trường Đại Học Nội Vụ Hà Nội 1.4 K tài liệu
Tác giả:





Preview text:
lOMoAR cPSD| 45438797
Những vấn đề cơ bản của sản xuất và tự động hoá sản xuất
1.1. Lịch sử, xu hướng phát triển của tự động hoá quá trình sản xuất
1.2. Hệ thống điều khiển, các phần tử của hệ thống điều khiển
1.3. Các thiết bị đo lường và thu thập dữ liệu
Trong tất cả các hệ thống tự động, thiết bị đo lường, tiếp nhận thông tin về diễn biến của
môi trường và diễn biến của các đại lượng vật lý bên trong hệ thống được gọi là cảm biến
(sensor). Đối với người sử dụng, việc nắm được nguyên lý cấu tạo và các đcajw tính cơ
bản của cảm biến là điều kiênnj tiên quyết để đảm bảo sự vận hành tốt của hệ thống tự động. 1.3.1. Cảm biến
Cảm biến là thiết bị điện tử cảm nhận những trạng thái hay quá trình vật lý, hóa học hay
sinh học của môi trường cần khảo sát, và biến đổi thành tín hiệu điện để thu thập thông tin
về trạng thái hay quá trình đó.
Thông tin được xử lý để rút ra tham số định tính hoặc định lượng của môi trường, phục vụ
các nhu cầu nghiên cứu khoa học kỹ thuật hay dân sinh và gọi ngắn gọn là đo lường, phục
vụ trong truyền và xử lý thông tin, hay trong điều khiển các quá trình khác.
Cảm biến thường được đặt trong các vỏ bảo vệ tạo thành đầu thu hay đầu dò (Test probe),
có thể có kèm các mạch điện hỗ trợ, và nhiều khi trọn bộ đó lại được gọi luôn là "cảm
biến". Tuy nhiên trong nhiều văn liệu thì thuật ngữ cảm biến ít dùng cho vật có kích thước
lớn. Thuật ngữ này cũng không dùng cho một số loại chi tiết, như cái núm của công tắc bật
đèn khi mở tủ lạnh, dù rằng về mặt hàn lâm núm này làm việc như một cảm biến.
Có nhiều loại cảm biến khác nhau và có thể chia ra hai nhóm chính trong ngành công nghiệp:
• Cảm biến vật lý: Sóng điện từ, ánh sáng, tử ngoại, hồng ngoại, tia X, tia gamma, hạt
bức xạ, nhiệt độ, áp suất, âm thanh, rung động, khoảng cách, chuyển động, gia tốc,
từ trường, trọng trường,...
• Cảm biến hóa học: Độ ẩm, độ PH, các ion, hợp chất đặc hiệu, khói,...
Có sự rất đa dạng của các hiện tượng cần cảm biến, cũng như phương cách chế ra các cảm
biến, và những cảm biến mới liên tục phát triển. Việc phân loại cảm biến cũng phức tạp vì
khó có thể đưa ra đủ các tiêu chí phân loại cho tập hợp đa dạng như vậy được.
1.3.2. Các đặc trưng của cảm biến
Một cảm biến được sử dụng khi đáp ứng các tiêu chí kỹ thuật xác định. lOMoAR cPSD| 45438797
- Độ nhạy: Gia số nhỏ nhất có thể phát hiện
- Mức tuyến tính: Khoảng giá trị được biến đổi có hệ số biến đổi cố định
- Dải biến đổi: Khoảng giá trị biến đổi sử dụng được
- Ảnh hưởng ngược: Khả năng gây thay đổi môi trường
- Mức nhiễu ồn: Tiếng ồn riêng và ảnh hưởng của tác nhân khác lên kết quả
- Sai số xác định: Phụ thuộc độ nhạy và mức nhiễu
- Độ trôi: Sự thay đổi tham số theo thời gian phục vụ hoặc thời gian tồn tại (date).
- Độ trễ: Mức độ đáp ứng với thay đổi của quá trình
- Độ tin cậy: Khả năng làm việc ổn định, chịu những biến động lớn của môi trường như sốc các loại
- Điều kiện môi trường: Dải nhiệt độ, độ ẩm, áp suất,... làm việc được.
Có sự tương đối trong tiêu chí tùy thuộc lĩnh vực áp dụng. Các cảm biến ở các thiết bị số
(digital), tức cảm biến logic, thì độ tuyến tính không có nhiều ý nghĩa.
1.3.3. Các loại cảm biến
- Cảm biến điện trở: Hoạt động dựa theo di chuyển con chạy hoặc góc quay của biến
trở, hoặc sự thay đổi điện trở do co giãn vật dẫn. - Cảm biến cảm ứng:
• Cảm biến biến áp vi phân: Cảm biến vị trí (Linear variable differential transformer, LVDT)
• Cảm biến cảm ứng điện từ: các antenna
• Cảm biến dòng xoáy: Các đầu dò của máy dò khuyết tật trong kim loại, của máy dò mìn.
• Cảm biến cảm ứng điện động: chuyển đổi chuyển động sang điện như
microphone điện động, đầu thu sóng địa chấn trên bộ (Geophone).
- Cảm biến điện dung: Sự thay đổi điện dung của cảm biến khi khoảng cách hay góc
đến vật thể kim loại thay đổi.
- Cảm biến điện trường (FET): Sự thay đổi của điện trường ngoài dẩn đến sự thay đổi
của cường độ dòng điện bên trong cảm biến.
- Cảm biến từ giảo (magnetoelastic): ít dùng. lOMoAR cPSD| 45438797
- Cảm biến từ trường: Cảm biến hiệu ứng Hall, cảm biến từ trường dùng vật liệu sắt
từ,... dùng trong từ kế.
- Cảm biến áp điện: Chuyển đổi áp suất sang điện dùng gốm áp điện như titanat bari,
trong các microphone thu âm, hay ở đầu thu sóng địa chấn trong nước (Hydrophone) như trong các máy Sonar.
- Cảm biến quang: Các cảm biến ảnh loại CMOS hay cảm biến CCD trong camera,
các photodiode ở các vùng phổ khác nhau dùng trong nhiều lĩnh vực. Ví dụ đơn giản
nhất là đầu dò giấy trong khay của máy in làm bằng photodiode. Chúng đang là
nhóm đầu bảng được dùng phổ biến, nhỏ gọn và tin cậy cao.
- Cảm biến huỳnh quang, nhấp nháy: Sử dụng các chất phát quang thứ cấp để phát
hiện các bức xạ năng lượng cao hơn, như các tấm kẽm sulfua.
- Cảm biến điện hóa: Các đầu dò ion, độ pH,...
- Cảm biến nhiệt độ: Cặp lưỡng kim, hoặc dạng linh kiện bán dẫn như Precision
Temperatur Sensor LM335 có hệ số 10 mV/°K.
Hình . Nhiệt điện trở (Resitance temperature detector –RTD)
1.4. Các thiết bị chấp hành
1.4.1. Định nghĩa cơ cấu chấp hành
Cơ cấu chấp hành (Actuator) có thể hiểu là một bộ phận máy móc, thiết bị có khả năng
thực hiện một công việc nào đó dưới tác động của tín hiệu điều khiển phát ra từ thiết bị
điều khiển. Hiểu đơn giản, cơ cấu chấp hành là thành phần tạo ra sự chuyển động trong một cỗ máy.
Cơ cấu chấp hành có thể phân ra làm ba nhóm chính dựa trên nguồn năng lượng sử dụng:
- Các cơ cấu chấp hành thủy lực lOMoAR cPSD| 45438797
- Các cơ cấu chấp hành khí nén
- Các cơ cấu chấp hành điện
Tùy theo mức năng lượng sử dụng có thể phân cơ cấu chấp hành theo các dải năng lượng khác nhau:
- Cơ cấu chấp hành năng lượng thấp bao gồm các loại phần tử sau: nhiệt điện trở, điôt
quang LED, màn hình tinh thể lỏng LCD, màn hình plasma, ống tia catôt, máy phát lực áp điện.
- Cơ cấu chấp hành năng lượng trung bình: nam châm điện, động cơ điện, xilanh khí
nén, xilanh thủy lực, động cơ thủy khí chuyển động quay, van khí, van thủy lực.
- Các thiết bị truyền động: băng tải tự động, vít me bi, bộ cấp liệu rung., cơ cấu phân độ, bộ truyền sóng.
- Một số thiết bị chuyên dụng cũng được xem như cơ cấu chấp hành: bàn dịch chuyển
X-Y, máy NC, robot, thiết bị lắp ráp, máy hàn, thiết bị kiểm tra, hệ thống kho và cấp phát tự động.
1.4.2. Thành phần của cơ cấu chấp hành
- Nguồn điện: Là nơi cung cấp năng lượng đầu vào để điều khiển các thiết bị truyền
động. Chúng có thể là dòng điện, chất lỏng hoặc khí tự nhiên trong những lĩnh vực công nghiệp.
- Bộ chuyển đổi nguồn: Tạo năng lượng từ nguồn cho cơ cấu chấp hành phù hợp
thông qua các phép đo do bộ điều khiển thiết lập. Một số bộ chuyển đổi nguồn
thường gặp là: bộ biến tần điện hoặc van tỷ lệ thủy lực trong hệ thống công nghiệp.
- Thiết bị truyền động: Là tập hợp những thiết bị chuyển đổi năng lượng được cung cấp thành lực cơ học.
- Tải trọng cơ học: Năng lượng sau khi được chuyển đổi giúp một thiết bị cơ học hoạt
động. Tải trọng cơ học đề cập đến hệ thống cơ khí này đang được dẫn động bởi thiết bị truyền động.
- Bộ điều khiển: Giúp hệ thống hoạt động liên tục với số lượng đầu vào thích hợp và
các điểm đặt khác do người điều khiển quyết định.
1.4.3. Đặc tính hoạt động của cơ cấu chấp hành
- Có khả năng định vị chính xác
- Khởi động và dừng ngay lập tức, không có thời gian “chết” hoặc chuyển động quá vị trí
- Thực hiện nhiệm vụ liên tục, không giới hạn về số lần khởi động trong mỗi phút
- Chuyển động nhất quán
- Những thiết bị trong công nghiệp phải đảm bảo chắc chắn, hoạt động tốt trong môi
trường khắc nghiệt mà không giảm hiệu suất lOMoAR cPSD| 45438797
- Cần bảo dưỡng định kỳ trong thời gian tối thiểu
Với những đặc tính trên, các thiết bị truyền động sẽ mang lại những lợi ích cực kỳ quan trọng:
- Theo dõi tín hiệu yêu cầu từ bộ điều khiển chính xác và nhanh nhất, giúp phản hồi
theo chỉ dẫn của bộ điều khiển hiệu quả hơn.
- Có độ tin cậy cao hơn so với các thiết bị thông thường
1.4.4. 4 loại cơ cấu chấp hành phổ biến hiện nay 1.4.4.1.
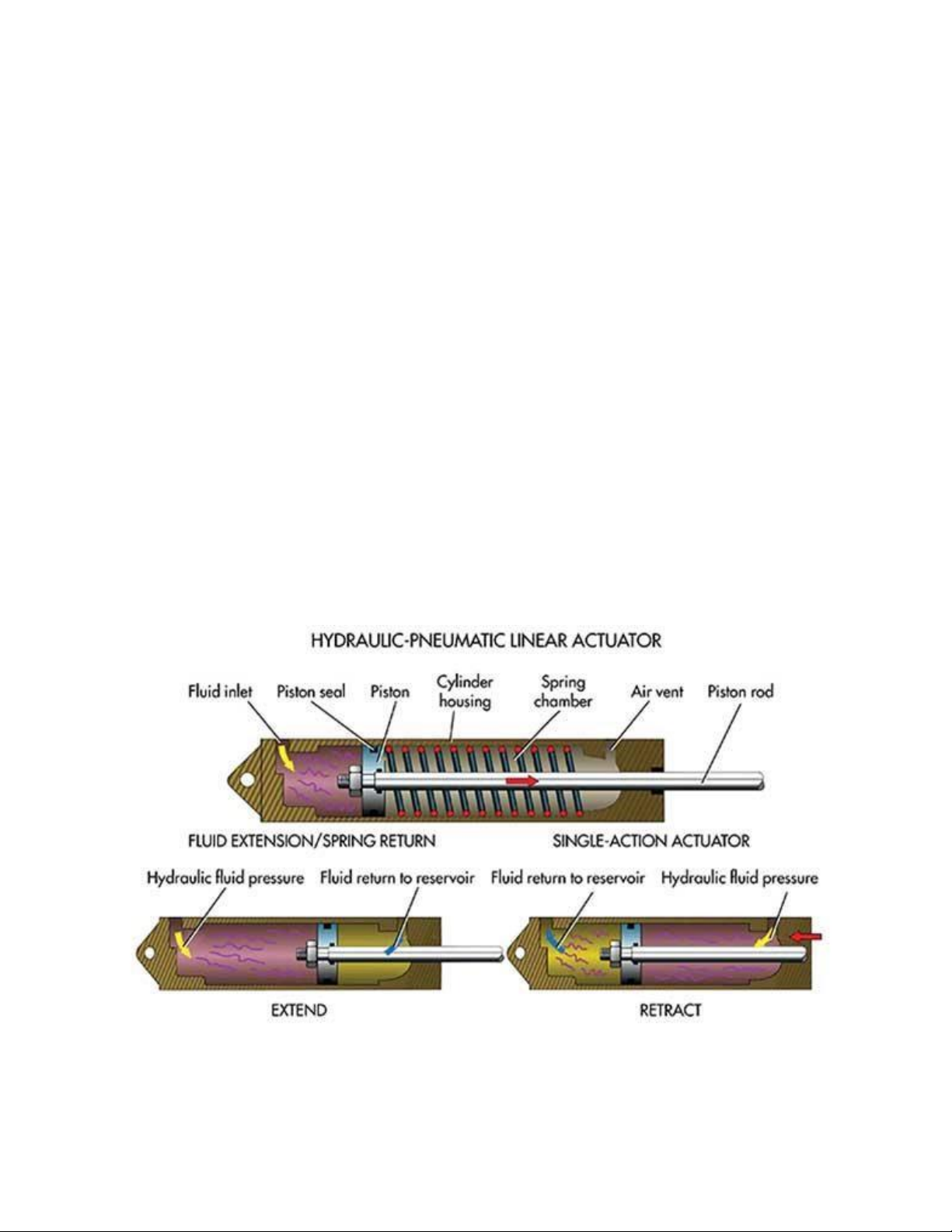
Cơ cấu chấp hành tuyến tính thủy lực
Thiết bị này tạo ra những chuyển động thẳng bằng cách đặt áp suất không cân bằng với
chất lỏng thủy lực lên một piston trong ống rỗng. Quy trình này tạo ra mô-men xoắn mạnh
để điều khiển một vật bên ngoài.
Do chất lỏng hầu như không thể nén được nên thiết bị này có thể tạo ra số lượng mô-men
lớn. Cơ cấu chấp hành thủy lực chuyển động theo một hướng nhờ các piston. Do đó, người
ta sử dụng thêm lò xo để chúng có thể chuyển động ngược lại.
Thiết bị này sử dụng áp suất ở hai đầu nhằm giảm bớt chuyển động tương đối từ hai bên.
Chúng được dùng để chuyển tại vật nặng, phù hợp với các thiết bị xây dựng lớn hoạt động thường xuyên. 1.4.4.2.
Cơ cấu chấp hành tuyến tính khí nén lOMoAR cPSD| 45438797
Đây được xem là thiết bị truyền động đơn giản và tiết kiệm nhất. Thông qua khí nén, chúng
kéo căng và dài một piston để tạo ra sự chuyển động. Piston sẽ được thu lại bằng một lò
xo hoặc chất lỏng ở đầu đối diện.
Cơ cấu chấp hành tuyến tính khí nén tạo ra mô-men xoắn ốc và tốc độ cao trên diện tích
nhỏ gọn. Chúng có ưu điểm là nhanh và không dễ bị phá hỏng bởi các điểm dừng khó. Bộ
truyền động này được ứng dụng trong các thiết bị chống cháy, nổ hoặc chịu các điều kiện
khó khăn như nhiệt độ cao. 1.4.4.3.
Cơ cấp chấp hành áp điện
Một số vật liệu rắn như gốm phản ứng với điện tích bằng cách thu lại hoặc phóng to và tạo
năng lượng khi có áp lực cơ học. Cơ cấu chấp hành áp điện dựa trên nguyên tắc đó để tạo
ra chuyển động. Tuy nhiên, những chuyển động này được tạo ra song song với điện trường.
Hạn chế của cơ cấu áp điện là chỉ di chuyển được vài micron tại một thời điểm, nghĩa là
chúng chỉ di chuyển khoảng 5% so với chiều dài thực. 1.4.4.4.
Cơ cấu chấp hành tuyến tính điện
Cũng như tên gọi của chúng, thiết bị này sử dụng nguồn điện để tạo ra chuyển động theo
một đường thẳng. Chúng hoạt động dựa trên một piston qua lại theo tín hiệu điện. Cơ cấu
chấp hành tuyến tính điện được dùng cho các chuyển động như: kéo, nâng lên, hạ xuống, đẩy ra, kẹp, chặn,…
Thiết bị bao gồm một động cơ tạo ra chuyển động quay tốc độ cao và hộp số làm chậm tác
động. Hoạt động này khiến tăng mô-men xoắn, biến thành trục vít bị dẫn, tạo ra chuyển
động thẳng của trục quay hoặc đai ốc truyền động. lOMoAR cPSD| 45438797
Tùy theo nhu cầu sử dụng, nhà sản xuất sẽ thiết kế bộ truyền động khác nhau bằng cách
tăng hoặc giảm chiều dài trục. Ngoài ra, với những bánh răng khác nhau, bộ truyền sẽ có
tốc độ khác nhau. Tóm lại, lực càng giảm thì tốc độ quay của trục vít càng lớn.
Khi công tắc ở trục truyền động sơ cấp hoàn thiện, quá trình xoắn sẽ diễn ra đến cuối
chuyển động. Đến khi vòng quay kết thúc, công tắc sẽ tự ngắt nguồn động cơ.
Cơ cấu chấp hành được thiết kế theo nhiều phiên bản khác nhau tùy vào mục đích sử dụng.
Tài liệu liên quan:
-

Bài tập Tài chính vi mô|Đại học Nội Vụ Hà Nội
182 91 -

Đề thi kiểm tra giữa kỳ môn Kinh tế vi mô | Đại học Nội Vụ Hà Nội
348 174 -

Bài giảng Kinh tế vi mô- Chương 1. Kinh Tế Vi Mô Và Những Vấn Đề Cơ Bản Của Nền Kinh Tế
1.4 K 706 -

Bài kiểm tra giữa kỳ môn Kinh tế vi mô | Đại học Nội Vụ Hà Nội
269 135 -

Bài tập Kinh tế vi mô | Đại học Nội Vụ Hà Nội
239 120